
Wide-Range, Washable Piezoresistive Pressure Sensor Based on MCNT-PDMS Dip-Coated PDMS Sponge


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Experimental Details
2.1. Materials
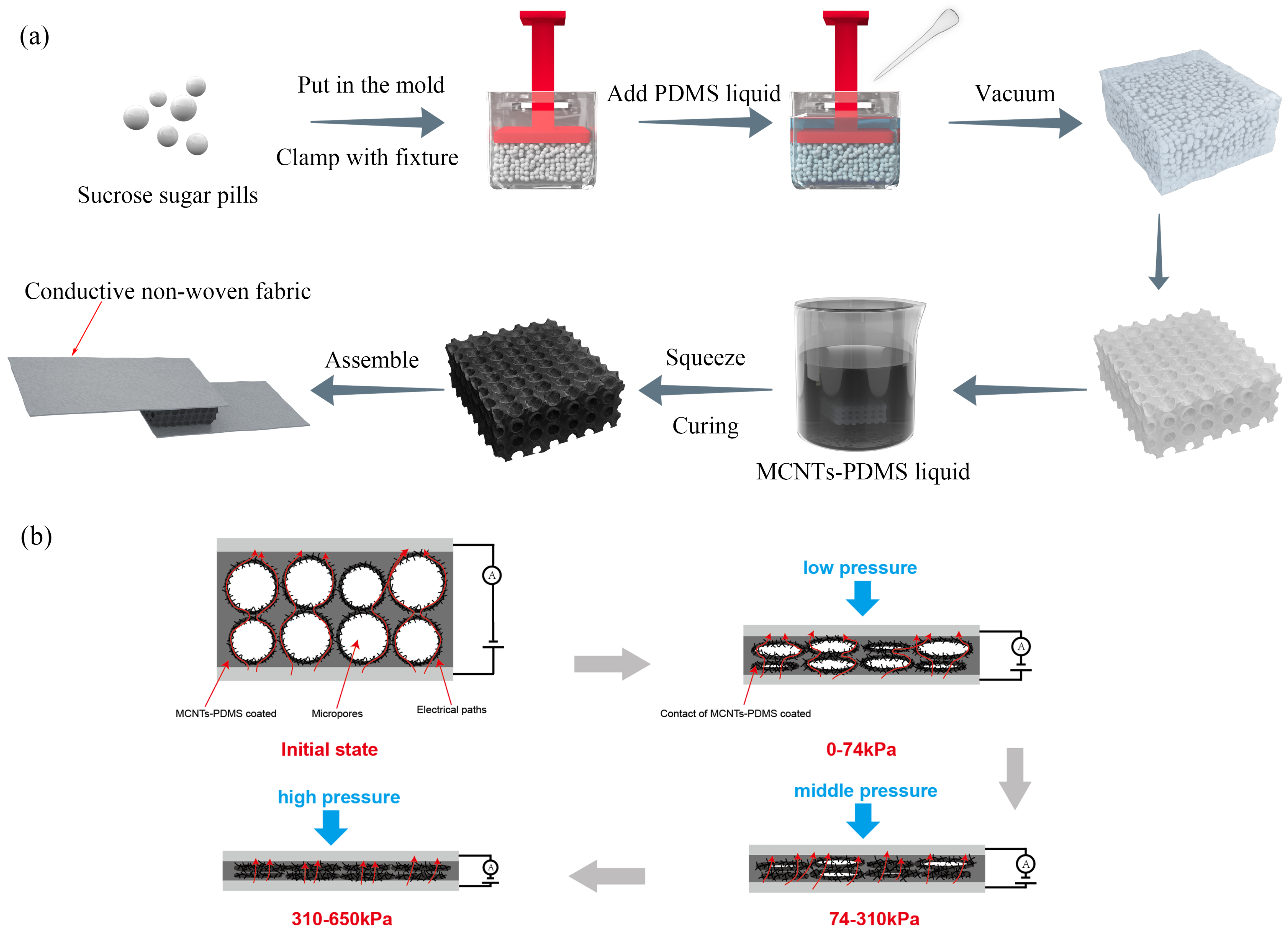
2.2. Preparation of Porous PDMS Sponges
2.3. Preparation of Carbon Nanotube Composite Network-Coated PDMS (MCNT-PDMS/ PDMS) Sponges
2.4. Preparation of MCNT-PDMS/PDMS Sponge Pressure Sensors
2.5. Characterization
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; Yu, J.; Cui, Y.; Li, W. Research progress of flexible wearable pressure sensors. Sens. Actuators A Phys. 2021, 330, 112838. [Google Scholar] [CrossRef]
- Yuan, Y.; Liu, B.; Li, H.; Li, M.; Song, Y.; Wang, R.; Wang, T.; Zhang, H. Flexible wearable sensors in medical monitoring. Biosensors 2022, 12, 1069. [Google Scholar] [CrossRef]
- Qiu, J.; Liu, S.; Guo, Y.; Yang, L.; Jiang, K. Anisotropic flexible pressure/strain sensors: Recent advances, fabrication techniques, and future prospects. Chem. Eng. J. 2024, 504, 158799. [Google Scholar] [CrossRef]
- Sinha, A.; Koo, D.; Kim, J.; So, H. Physiologically compatible MWCNT-incorporated PNCPG self-healed ionic breathable hydrogel for wearable smart strain sensor application. Nano Today 2025, 61, 102606. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, B.; Chen, J.; Zhu, M.; Jiang, Z. Flexible Nanofiber Pressure Sensors with Hydrophobic Properties for Wearable Electronics. Materials 2024, 17, 2463. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, J.; Zhu, Z.; Hu, C.; Peng, H.; Liu, B. Transparent, flexible nanoporous sensors with humidity and pressure sensing capabilities for sports health status monitoring. ACS Appl. Nano Mater. 2024, 7, 21209–21220. [Google Scholar] [CrossRef]
- Li, N.; Liu, J.; Zhao, S.; Li, Y.; Wei, Q. Skin-inspired bimodal pressure sensor for static and dynamic intelligent interactive perception system. Chem. Eng. J. 2024, 502, 158012. [Google Scholar] [CrossRef]
- Xu, S.; Xu, Z.; Li, D.; Cui, T.; Li, X.; Yang, Y.; Liu, H.; Ren, T. Recent advances in flexible piezoresistive arrays: Materials, design, and applications. Polymers 2023, 15, 2699. [Google Scholar] [CrossRef] [PubMed]
- Liu, G.; Lv, Z.; Batool, S.; Li, M.Z.; Zhao, P.; Guo, L.; Wang, Y.; Zhou, Y.; Han, S.T. Biocompatible material-based flexible biosensors: From materials design to wearable/implantable devices and integrated sensing systems. Small 2023, 19, 2207879. [Google Scholar] [CrossRef]
- Lee, H.; Kwon, D.; Cho, H.; Park, I.; Kim, J. Soft nanocomposite based multi-point, multi-directional strain mapping sensor using anisotropic electrical impedance tomography. Sci. Rep. 2017, 7, 39837. [Google Scholar] [CrossRef]
- Li, W.; Jin, X.; Han, X.; Li, Y.; Wang, W.; Lin, T.; Zhu, Z. Synergy of porous structure and microstructure in piezoresistive material for high-performance and flexible pressure sensors. ACS Appl. Mater. Interfaces 2021, 13, 19211–19220. [Google Scholar] [CrossRef]
- Duan, Z.; Jiang, Y.; Huang, Q.; Wang, S.; Zhao, Q.; Zhang, Y.; Liu, B.; Yuan, Z.; Wang, Y.; Tai, H. Facilely constructed two-sided microstructure interfaces between electrodes and cellulose paper active layer: Eco-friendly, low-cost and high-performance piezoresistive sensor. Cellulose 2021, 28, 6389–6402. [Google Scholar] [CrossRef]
- Zhao, X.; Zhao, S.; Zhang, X.; Su, Z. Recent progress in flexible pressure sensors based on multiple microstructures: From design to application. Nanoscale 2023, 15, 5111–5138. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Chen, D.; Li, C.; Liu, W.; Liu, H. Engineered microstructure derived hierarchical deformation of flexible pressure sensor induces a supersensitive piezoresistive property in broad pressure range. Adv. Sci. 2020, 7, 2000154. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.X.; He, Y.; Liang, Y.; Tang, J.; Yang, Y.; Song, H.M.; Zrínyi, M.; Chen, Y.M. Sensitive piezoresistive pressure sensor based on micropyramid patterned tough hydrogel. Appl. Surf. Sci. 2023, 615, 156328. [Google Scholar] [CrossRef]
- Sun, X.; Sun, J.; Zheng, S.; Wang, C.; Tan, W.; Zhang, J.; Liu, C.; Liu, C.; Li, T.; Qi, Z.; et al. A sensitive piezoresistive tactile sensor combining two microstructures. Nanomaterials 2019, 9, 779. [Google Scholar] [CrossRef]
- Qiu, Y.; Tian, Y.; Sun, S.; Hu, J.; Wang, Y.; Zhang, Z.; Liu, A.; Cheng, H.; Gao, W.; Zhang, W.; et al. Bioinspired, multifunctional dual-mode pressure sensors as electronic skin for decoding complex loading processes and human motions. Nano Energy 2020, 78, 105337. [Google Scholar] [CrossRef]
- Du, D.; Ma, X.; An, W.; Yu, S. Flexible piezoresistive pressure sensor based on wrinkled layers with fast response for wearable applications. Measurement 2022, 201, 111645. [Google Scholar] [CrossRef]
- Deng, S.; Zeng, Q.; Xiao, Z.; Zhang, J.; Yang, G.; Wu, X.; Li, J.; Zhang, D.; Zhou, J.; Liu, B. High-performance flexible piezoresistive 3D pressure sensor based on wrinkled structures and porous microstructures. Mater. Lett. 2025, 379, 137688. [Google Scholar] [CrossRef]
- Lv, Y.; Zhang, M.; Zhao, B.; Qin, Z.; Chen, K.; Liu, Y.; Pan, K. Flexible laser-reduced graphene with gradient-wrinkled microstructures for piezoresistive pressure sensors. ACS Appl. Nano Mater. 2024, 7, 18986–18994. [Google Scholar] [CrossRef]
- Zhang, P.; Ang, L.; Li, Y.; Guo, C.; Zhang, Y. Biomimetic Wearable Flexible Pressure Sensor with Multi-level Microstructured Piezoresistive Layer. IEEE Sens. J. 2024, 24, 16744–16751. [Google Scholar] [CrossRef]
- Yan, J.; Ma, Y.; Jia, G.; Zhao, S.; Yue, Y.; Cheng, F.; Zhang, C.; Cao, M.; Xiong, Y.; Shen, P.; et al. Bionic MXene based hybrid film design for an ultrasensitive piezoresistive pressure sensor. Chem. Eng. J. 2022, 431, 133458. [Google Scholar] [CrossRef]
- Guo, X.; Liu, T.; Tang, Y.; Li, W.; Liu, L.; Wang, D.; Zhang, Y.; Zhang, T.; Zhu, X.; Guan, Y.; et al. Bioinspired low hysteresis flexible pressure sensor using nanocomposites of multiwalled carbon nanotubes, silicone rubber, and carbon nanofiber for human–computer interaction. ACS Appl. Nano Mater. 2024, 7, 15626–15639. [Google Scholar] [CrossRef]
- Huang, A.; Gu, S.; Yang, Z.; Chen, X.; He, M.; Peng, X. Flexible, Lightweight, and Hydrophobic TPU/CNT Nanocomposite Foam With Different Surface Microstructures for High-Performance Wearable Piezoresistive Sensors. J. Polym. Sci. 2025, 63, 709–723. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, C.; Han, W. Extending the pressure sensing range of porous polypyrrole with multiscale microstructures. Nanoscale 2020, 12, 2081–2088. [Google Scholar] [CrossRef]
- Yin, T.; Cheng, Y.; Hou, Y.; Sun, L.; Ma, Y.; Su, J.; Zhang, Z.; Liu, N.; Li, L.; Gao, Y. 3D Porous Structure in MXene/PANI Foam for a High-Performance Flexible Pressure Sensor. Small 2022, 18, 2204806. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; So, H. 3D-printing-assisted flexible pressure sensor with a concentric circle pattern and high sensitivity for health monitoring. Microsyst. Nanoeng. 2023, 9, 44. [Google Scholar] [CrossRef]
- Shin, S.; Ko, B.; So, H. Structural effects of 3D printing resolution on the gauge factor of microcrack-based strain gauges for health care monitoring. Microsyst. Nanoeng. 2022, 8, 12. [Google Scholar] [CrossRef]
- Wei, H.; Li, X.; Yao, F.; Feng, X.; Zhu, X. Flexible piezoresistive pressure sensor based on a graphene-carbon nanotube-polydimethylsiloxane composite. Nanotechnol. Precis. Eng. 2024, 7, 033004. [Google Scholar] [CrossRef]
- Sun, Q.J.; Zhuang, J.; Venkatesh, S.; Zhou, Y.; Han, S.T.; Wu, W.; Kong, K.W.; Li, W.J.; Chen, X.; Li, R.K.; et al. Highly sensitive and ultrastable skin sensors for biopressure and bioforce measurements based on hierarchical microstructures. ACS Appl. Mater. Interfaces 2018, 10, 4086–4094. [Google Scholar] [CrossRef]
- Bang, J.; Chun, B.; Lim, J.; Han, Y.; So, H. Ultra-broad linear range and sensitive flexible piezoresistive sensor using reversed lattice structure for wearable electronics. ACS Appl. Mater. Interfaces 2023, 15, 34120–34131. [Google Scholar] [CrossRef]
- Bang, J.; Chun, B.; Kim, M.; Lim, J.; Han, Y.; So, H. Rapid thermal runaway detection of lithium-ion battery via swelling-based state-of-charge monitoring using piezoresistive sponge sensor. eTransportation 2025, 24, 100404. [Google Scholar] [CrossRef]
- Sun, P.; Wu, D.; Liu, C. High-sensitivity tactile sensor based on Ti2C-PDMS sponge for wireless human–computer interaction. Nanotechnology 2021, 32, 295506. [Google Scholar] [CrossRef]
- Sengupta, D.; Kamat, A.M.; Smit, Q.; Jayawardhana, B.; Kottapalli, A.G.P. Piezoresistive 3D graphene–PDMS spongy pressure sensors for IoT enabled wearables and smart products. Flex. Print. Electron. 2022, 7, 015004. [Google Scholar] [CrossRef]
- Lee, S.J.; Ung, S.C.; Kim, C.L. Highly compressible wearable sensor with CNT-coated PDMS sponge electrodes for tactile monitoring application. Phys. Scr. 2024, 99, 055942. [Google Scholar] [CrossRef]
- Ding, Y.; Yang, J.; Tolle, C.R.; Zhu, Z. Flexible and compressible PEDOT: PSS@ melamine conductive sponge prepared via one-step dip coating as piezoresistive pressure sensor for human motion detection. ACS Appl. Mater. Interfaces 2018, 10, 16077–16086. [Google Scholar] [CrossRef] [PubMed]
- Ding, Y.; Xu, T.; Onyilagha, O.; Fong, H.; Zhu, Z. Recent advances in flexible and wearable pressure sensors based on piezoresistive 3D monolithic conductive sponges. ACS Appl. Mater. Interfaces 2019, 11, 6685–6704. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Zhang, K.; Dai, X.X.; Li, Y.; Guo, J.; Liu, H.; Li, G.H.; Tan, Y.J.; Zeng, J.B.; Guo, Z. Enhanced electrical conductivity and piezoresistive sensing in multi-wall carbon nanotubes/polydimethylsiloxane nanocomposites via the construction of a self-segregated structure. Nanoscale 2017, 9, 11017–11026. [Google Scholar] [CrossRef]
- Cai, Y.; Liu, L.; Meng, X.; Wang, J.; Zhang, C.; Li, J.; Lu, Z.; Duan, J.a. A broad range and piezoresistive flexible pressure sensor based on carbon nanotube network dip-coated porous elastomer sponge. RSC Adv. 2022, 12, 34117–34125. [Google Scholar] [CrossRef]
- An, Y.; Liu, J.; Yan, J.; Feng, H.; Zhou, R.; Wu, D.; Yang, J.; Liu, T.; Sun, J. A Simple and Efficient Preparation Method for Flexible Pressure Sensors Using Salt Template and Vacuum Infiltration. Adv. Mater. Technol. 2025, 2500013. [Google Scholar] [CrossRef]
- Zhang, X.; Dai, H.; Ji, M.; Han, Y.; Jiang, B.; Cheng, C.; Song, X.; Song, Y.; Wu, G. A flexible piezoresistive strain sensor based on AgNWs/MXene/PDMS sponge. J. Mater. Sci. Mater. Electron. 2025, 36, 1–9. [Google Scholar] [CrossRef]
- Kang, S.; Lee, J.; Lee, S.; Kim, S.; Kim, J.K.; Algadi, H.; Al-Sayari, S.; Kim, D.E.; Kim, D.; Lee, T. Highly sensitive pressure sensor based on bioinspired porous structure for real-time tactile sensing. Adv. Electron. Mater. 2016, 2, 1600356. [Google Scholar] [CrossRef]
- Mamunya, Y.P.; Muzychenko, Y.V.; Pissis, P.; Lebedev, E.; Shut, M. Percolation phenomena in polymers containing dispersed iron. Polym. Eng. Sci. 2002, 42, 90–100. [Google Scholar] [CrossRef]
- Wang, Y.; Luo, W.; Wen, Y.; Zhao, J.; Chen, C.; Chen, Z.; Zhang, X.S. Wearable, washable piezoresistive pressure sensor based on polyurethane sponge coated with composite CNT/CB/TPU. Mater. Today Phys. 2025, 52, 101681. [Google Scholar] [CrossRef]
- Sheng, M.; Xiao, Z.; Deng, S.; Wu, X.; Zeng, Q.; Zhang, J.; Li, J.; Zhang, D.; Yang, G.; Qiang, Q.; et al. A super water-stable polyaniline sponge sensor for multifunctional sensing of physical and chemical stimuli. Sens. Actuators A Phys. 2025, 387, 116398. [Google Scholar] [CrossRef]
- Trung, V.D.; Zhao, W.; Natsuki, J.; Tan, J.; Yang, W.; Natsuki, T. Synergistic interfacial engineering for ultrasensitive bionic tunable strain sensors with robust sensing stability and integrated thermal management. Chem. Eng. J. 2025, 508, 161056. [Google Scholar] [CrossRef]
- Kallingal, N.; Kavil, S.N.; Fathima, A.; Ghosh, P.; Hussen, E.; Abdelrahman, N.; Ahmed, R.; Awad, S.; Kasak, P.; Popelka, A. Fabrication of Bioinspired 3D-Printed Microtextures for Efficient Water Harvesting Using Plasma Treatment. J. Environ. Chem. Eng. 2025, 13, 115713. [Google Scholar] [CrossRef]
- Sheng, S.; Wang, M.; Mu, L. An innovative and rapid method for permanent hydrophilic modification of polydimethylsiloxane (PDMS) chip surfaces. J. Appl. Phys. 2025, 137, 015301. [Google Scholar] [CrossRef]
- Cain, S.M.; Ashton-Miller, J.A.; Perkins, N.C. On the skill of balancing while riding a bicycle. PLoS ONE 2016, 11, e0149340. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, K.; Wang, X.; Xue, T.; Zhao, Y.; Zou, Q. Wide-Range, Washable Piezoresistive Pressure Sensor Based on MCNT-PDMS Dip-Coated PDMS Sponge. Micromachines 2025, 16, 477. https://doi.org/10.3390/mi16040477
Luo K, Wang X, Xue T, Zhao Y, Zou Q. Wide-Range, Washable Piezoresistive Pressure Sensor Based on MCNT-PDMS Dip-Coated PDMS Sponge. Micromachines. 2025; 16(4):477. https://doi.org/10.3390/mi16040477
Chicago/Turabian StyleLuo, Kun, Xinyi Wang, Tao Xue, Yingying Zhao, and Qiang Zou. 2025. "Wide-Range, Washable Piezoresistive Pressure Sensor Based on MCNT-PDMS Dip-Coated PDMS Sponge" Micromachines 16, no. 4: 477. https://doi.org/10.3390/mi16040477
APA StyleLuo, K., Wang, X., Xue, T., Zhao, Y., & Zou, Q. (2025). Wide-Range, Washable Piezoresistive Pressure Sensor Based on MCNT-PDMS Dip-Coated PDMS Sponge. Micromachines, 16(4), 477. https://doi.org/10.3390/mi16040477