1. Introduction
High-precision positioning was primarily limited to academic domains. However, advancements in fabrication methods since the turn of the century have opened up new possibilities for incorporating micro-actuators into industrial environments. Piezoelectric actuators (PEAs) have since become indispensable in numerous applications requiring precise control and manipulation of mechanical systems. They are integral components in the micro-positioning systems used in nanotechnology, microscopy, and semiconductor manufacturing and facilitate extremely fine movements and adjustments [
1]. Additionally, PEAs are employed in precision positioning systems for optical components, mirrors, and lenses [
2], enhancing the accuracy of laser systems, telescopes, and image stabilization devices [
3]. They also play a vital role in vibration control systems by damping or controlling vibrations in mechanical structures and machinery to improve stability and reduce noise [
4,
5]. In the medical field, PEAs are utilized in devices such as micro-manipulators for minimally invasive surgery, ultrasound imaging equipment, and drug delivery systems [
6]. Furthermore, in aerospace and defense applications, PEAs contribute to tasks such as fine-tuning flight control surfaces, actuation in precision instruments, and vibration isolation in sensitive equipment [
7,
8]. Overall, PEAs serve as essential components in mechatronic systems, including robotics, enabling precise positioning of robotic arms, grippers, and end-effectors and providing better control motion in various industrial domains [
9].
PEAs offer several advantages, such as improved precision positioning, fast response times, and a wide range of operating frequencies. They are capable of producing large forces and displacements with relatively low power consumption, making them suitable for applications requiring high dynamic performance and energy efficiency. Moreover, piezoelectric materials exhibit inherent stiffness and mechanical stability, enabling precise control and positioning at micrometer and nanometer scales [
10]. Additionally, they are compact, lightweight, and resistant to electromagnetic interference, making them suitable for use in harsh environments and confined spaces. Unfortunately, PEAs present some limitations. They typically operate over limited displacement ranges and exhibit nonlinear behavior due to certain phenomena such as hysteresis [
11,
12], creep [
13], and temperature sensitivity [
14]. Furthermore, they require high driving voltages and sophisticated control electronics, which can increase system complexity and cost [
15]. Additionally, piezoelectric materials are brittle and can be susceptible to fatigue and degradation over time, particularly under cyclic loading conditions [
16]. Despite these challenges, advances in material science, manufacturing techniques, and control strategies continue to expand the capabilities and applications of PEAs. Hysteresis is a crucial and extensively studied phenomenon, particularly in systems where high precision is essential, such as guidance systems. It can introduce errors of up to 22% [
17], significantly impacting accuracy. Moreover, hysteresis cannot be overlooked as it not only affects achieving the desired position but can also lead to system instability [
18].
Hysteresis in PEAs is a complex phenomenon resulting from the interaction between mechanical strain and an electric field. When subjected to an electric field, the polarization of the material’s domains becomes aligned in an arbitrary direction [
19]. As the electric field increases, the poles of the material align with the field, resulting in elongation due to the ferroelectric effect. When the electric field decreases, the poles attempt to return to their initial orientations but with a certain deviation from their original positions [
20]. This difference between the initial and final states of the polarization creates a hysteresis loop, which manifests as a lag in the actuator’s response to changes in the applied voltage or force. Addressing hysteresis is essential for enhancing the accuracy and reliability of piezoelectric-based systems in different applications [
21].
Hysteresis in PEAs can be reduced through various techniques and approaches [
22]. One approach involves improving the design and fabrication of the piezoelectric material itself to minimize hysteresis. This may include optimizing the material composition, structure, and processing techniques to achieve more uniform polarization behavior. Another common method is to implement compensation algorithms in the control system to account for the non-linearity caused by hysteresis. These algorithms can use mathematical models or experimental data to predict and counteract the hysteresis effect in real time.
To mathematically model hysteresis behavior, several models have been developed. The Preisach model [
23] represents hysteresis using a distribution of hysterons, while the Jiles–Atherton [
24] model adapts concepts from magnetic materials to describe piezoelectric hysteresis. The Bouc–Wen model, commonly used in structural engineering, captures non-linear hysteresis through a set of differential equations [
25]. Additionally, the Prandtl–Ishlinskii model decomposes hysteresis into elementary operators, allowing for accurate representation of a wide range of hysteresis behaviors [
26]. Each model offers unique advantages and complexity levels, enabling engineers to select the most appropriate model based on application requirements and experimental data.
Machine learning techniques have become increasingly prevalent for modeling the hysteresis behavior of PEAs from experimental data. Among the principal machine learning approaches for this purpose are artificial neural networks (ANNs) [
27,
28,
29], support vector machines (SVMs) [
30], random forests [
31], and Gaussian processes (GPs) [
32]. These machine learning techniques provide flexible and data-driven approaches to hysteresis modeling, enabling accurate predictions and enhanced understanding of the dynamic characteristics of PEAs [
27]. Recurrent artificial neural networks (RNNs) have become a powerful tool for modeling non-linear dynamics [
33] such as PEA hysteresis behavior. Unlike feed-forward neural networks, RNNs have feedback connections that allow them to retain information about previous states, making them adequate for modeling dynamic systems with temporal dependencies, such as hysteresis phenomena. By incorporating feedback loops, RNNs can capture the temporal dynamics of the input–output relationship in PEA systems, enabling them to effectively model hysteresis loops over time.
The rate dependency of PEA hysteresis is a critical factor in its performance, particularly when operating across a wide range of frequencies. Traditional hysteresis models are often rate-independent and fail to accurately capture the dynamic behavior of PEAs under varying conditions. This dependency manifests as changes in the width of the hysteresis loop and the amplitude of displacement response, especially at higher frequencies.
Laboratory experiments have been performed to characterize the rate-dependent hysteresis properties of a piezoceramic actuator under various excitations in the 0.1–500 Hz frequency range and have revealed larger hysteresis loop widths and lower displacement response amplitudes above 10 Hz. A rate-dependent Prandtl–Ishlinskii model has been developed and validated and showed very good agreement with experimental data across different input types and frequencies [
34]. The paper models the rate-dependent behavior of piezoelectric materials using a three-dimensional finite element framework by applying a rate-dependent polarization framework to cyclic electrical loading at various frequencies. The onset of domain switching is determined by the reduction in free energy, and intergranular effects are captured via a probabilistic approach. Numerical simulations for PIC-151 ceramics show good agreement with experimental electric displacement versus electric field data [
35]. This paper presents a novel modified inverse Preisach model to compensate for the rate-dependent hysteresis of a piezoelectric actuator across varying frequency ranges. By adopting the fast Fourier transform method to select proper μ-density functions and weights, the proposed model forms a real-time online rate-dependent compensator, significantly improving the tracking control accuracy of the actuator [
36].
Robust controllers ensure stability and performance in control systems amidst uncertainties and disturbances. These controllers are designed to maintain desired system behavior even in the presence of variations or unknown factors. The use of robust control techniques systems can effectively mitigate external disturbances and uncertainties, thus enhancing their resilience and reliability. Robust controllers have been explored for PEA positioning with proven results. A robust control scheme based on inverse models and accompanied by a stability analysis is presented in [
16]. This approach yielded favorable outcomes, achieving an error of approximately 0.5
m. Several first-order sliding mode control (SMC) approaches have been devised and employed for PEAs, despite the significant drawback posed by chattering [
37,
38]. Integral sliding mode control (ISMC), introduced in [
39], offers another strategy for mitigating static error. However, its practicality diminishes when a mathematical model is employed due to the complexities of the dynamics, leading to reduced control accuracy [
40]. Integral fast terminal SMC (IFTSMC) controllers have proven their robustness, fast convergence, and ability to handle uncertainties and disturbances effectively. The addition of integral action to fast terminal SMCs ensures that any steady-state errors are minimized. This integral action helps to improve the tracking accuracy and disturbance rejection capabilities of the controller. The IFTSMC scheme has been proven in different domains, with promising results [
41,
42,
43].
This work proposes an ANN-based IFTSMC controller for piezoelectric actuator positioning. The ANN solves the necessity of having an accurate model of the non-linear dynamics of PEAs. The proposed controller is implemented in a real-time setup to validate the proposed solution. The performance of the PEA IFTSMC controller is compared to that of a PID controller since PID controllers are frequently used in the literature as reference controllers [
44,
45].
The paper is structured as follows:
Section 2 presents and discusses the hardware utilized and provides a brief overview of the hysteresis phenomenon. Furthermore, it introduces the ANN-based IFTSMC: with subsections dedicated to the discontinuous terms and the ANN. Additionally, a Lyapunov analysis is included to demonstrate the stability of the system with this novel controller. Finally,
Section 3 evaluates the real-time performance of the ANN: presenting results and comparisons between the PI controller and the ANN-based IFTSMC. Finally,
Section 4 provides the conclusion: summarizing the findings and discussing the implications of the study.
2. Materials and Methods
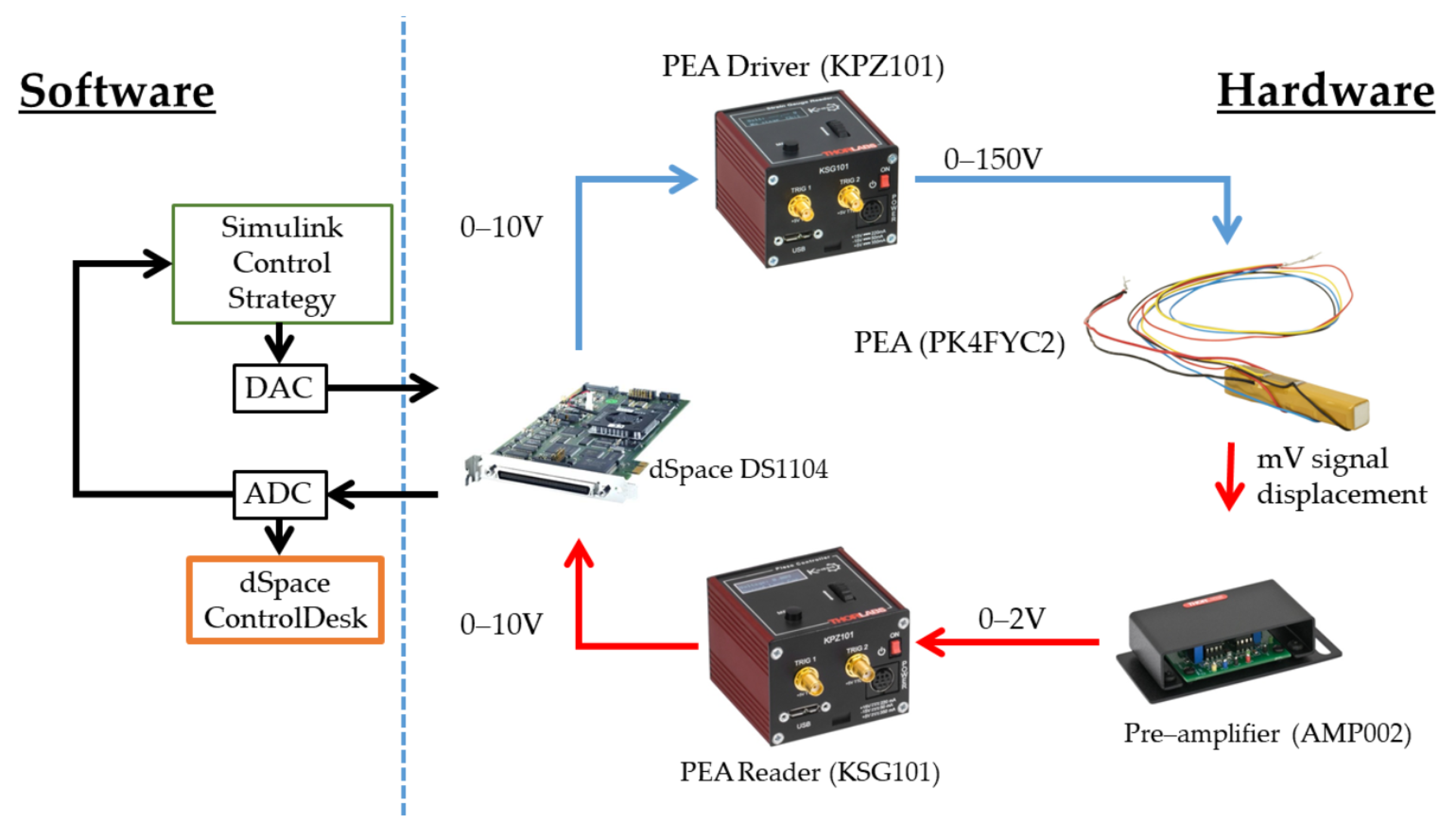
2.1. Hardware
This study utilizes commercial hardware from Thorlabs: specifically, the PK4FYC2 stack actuator. This actuator comprises multiple piezoelectric chips bonded together with epoxy and glass beads. It operates on a micrometric scale, and its elongation is measured using four strain gauges arranged in a Wheatstone bridge configuration. The actuator accepts voltage inputs ranging from 0 to 150 V, with 150 V resulting in the maximum displacement of 38.5 m. The manufacturer specifies a maximum error of 15%, primarily attributed to hysteresis, which can be mitigated by implementing a PID controller within a feedback control system. Additional technical specifications are provided below.
The voltage range of 0–150 V is generated using a single-channel driver cube, Thorlabs KPZ101, which is specifically recommended for the PEA. This driver cube is versatile and is compatible with a wide range of actuators. It offers convenient operation in open-loop mode without requiring a peripheral computer. Additionally, it can function in closed-loop mode with an external 0–10 V signal, scaling it up to 0–150 V for the PEA, with a maximum allowed bandwidth of 1 kHz.
Due to the Wheatstone-bridge-based measurement method, the elongation is represented as a resistance change, which can be challenging to read due to the small values involved. To address this issue, the manufacturer recommends using the pre-amplifier AMP002. This pre-amplifier amplifies the small differences in a 0–2 V signal, which is then fed into a cube reader: the Thorlabs KSG101. This reader displays the PEA extension on an embedded LED viewer and provides an output signal ranging from 0 to 10 V.
Table 1 provides the technical details of the PEA elements.
As mentioned earlier, both the driving and measurement signals operate within a 0–10 V range. Therefore, a dSpace DS1104 board is utilized for acquisition and control purposes. This hardware is equipped with real-time interface (RTI) capabilities, reducing compilation time for driving algorithms and enabling real-time control tuning. The board is connected via a peripheral component interconnect (PCI) bus to a Dell Precision Workstation T3500 (Warszawa, Poland) featuring an Intel 64 2.4 GHz microprocessor and 18 GB of available memory.
The control architecture is exclusively designed in Simulink 2022B by MathWorks and is implemented through dSpace RTI. This architecture is designed with flexibility for real-time operation and facilitates gain tuning and performance metric calculation. Real-time visualization of data is achieved using ControlDesk 2022B, while MATLAB by MathWorks is utilized for data processing and visualization. A sampling time of 1 kHz is established for all experiments, aligning with the relationship between data acquisition and hardware physical limitations.
Figure 1 provides a schematic overview of the flow between the hardware and software components.
2.2. Hysteresis
PEA hysteresis refers to the phenomenon observed in PEAs whereby the displacement of the actuator depends not only on the current input voltage but also on its previous history. This behavior arises due to the inherent properties of the material used in PEAs, which exhibit hysteresis characteristics. Hysteresis in PEAs occurs because the material undergoes irreversible changes in its internal structure when subjected to an electric field, resulting in a lag or memory effect in the actuator’s response. Specifically, when the input voltage is increased or decreased, the actuator’s displacement may not immediately follow the input signal due to this hysteresis effect. Instead, the displacement may lag or exhibit a different trajectory depending on the previous history of the input voltage. This hysteresis behavior can complicate the control of PEAs as it introduces non-linearities and memory effects that must be accounted for in the control algorithm. Therefore, understanding and modeling PEA hysteresis is essential for designing effective control strategies to accurately predict and control the actuator’s behavior.
The hysteresis cycle in PEAs refers to the characteristic loop-shaped behavior observed when plotting the actuator’s displacement against the applied voltage. This cycle typically consists of two main phases: the loading phase and the unloading phase.
During the loading phase, as the voltage applied to the PEA increases, the actuator undergoes a corresponding displacement, typically in the positive direction. This displacement is non-linear and may exhibit gradual increases or sudden jumps depending on factors such as the voltage magnitude and rate of change. As the voltage continues to increase, the actuator reaches its maximum displacement, which corresponds to the maximum voltage applied.
In the unloading phase, when the voltage is decreased, the actuator begins to retract or return to its original position. However, due to hysteresis effects, the actuator’s displacement may not immediately decrease in proportion to the voltage reduction. Instead, the displacement lags behind the voltage change, resulting in a different trajectory compared to the loading phase. This lag or memory effect is characteristic of hysteresis and is a key factor that complicates the control of PEAs.
Figure 2 shows the hysteresis of a PEA when a 1 Hz triangular signal is applied. The different curves correspond to the loading phase and the unloading phase.
2.3. Control Design and Performance Metrics
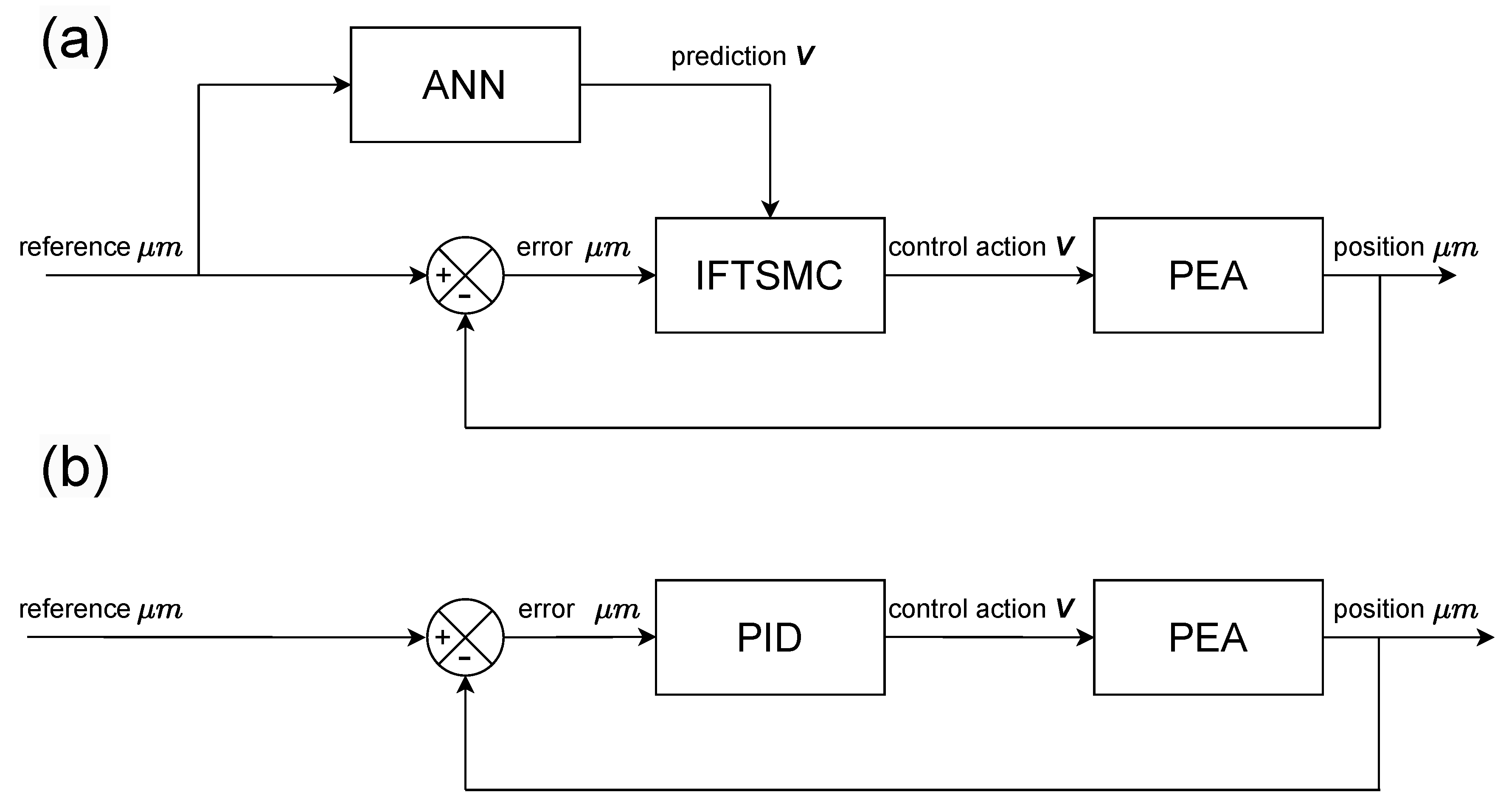
In this research, the focus was on implementing and evaluating two distinct control architectures through practical experimentation to ascertain their efficacy and performance in real-world scenarios. The experimental setups were designed to embody these architectures and provide a tangible platform for analysis and comparison.
Figure 3 illustrates a schematic representation of these structures. To optimize the control process, the controllers were endowed with specific degrees of freedom, which were primarily associated with tuning constants that were crucial for their operation. The tuning process involved iteratively adjusting these constants to achieve the desired control outcomes. A key aspect of this tuning methodology was the utilization of the integral of the absolute error (IAE) reduction technique. This approach aims to minimize the error between the desired and actual control responses by optimizing the controller’s parameters. In Equation (
1), the first term represents the expression for the IAE, which serves as the objective function for parameter optimization.
In addition to the IAE, which serves as a pivotal metric for evaluating guidance performance, this study incorporates two supplementary metrics: the root-mean-square error (RMSE) and the relative root-mean-square error (RRMSE). These additional metrics, inspired by the methodology outlined by the authors of reference [
46], provide nuanced insights into the control system’s efficacy by quantifying the magnitude and relative significance of deviations between observed and desired outcomes. The RMSE, calculated as the square root of the average of the squared differences between actual and reference values across all samples, offers a measure of the overall accuracy of the control system. On the other hand, the RRMSE normalizes the RMSE against the range of the reference values, providing a relative measure of error that facilitates comparison across different datasets. By integrating these supplementary metrics alongside the IAE, this research aimed to furnish a comprehensive assessment of the control system’s performance, enabling a nuanced understanding of its effectiveness at meeting desired guidance objectives.
2.4. PI Control
Proportional–integral (PI) control is a widely used method in control engineering and is renowned for its simplicity and effectiveness at regulating various systems across diverse industries. Rooted in the principles of feedback control, a PI controller combines proportional and integral actions to achieve desired system performance.
Proportional control provides control action that is proportional to the current error, allowing the system to respond to deviations from the set point. However, it may lead to steady-state errors if there are inherent system biases. Integral control is designed to eliminate steady-state errors by continuously integrating the error signal over time and adding it to the control signal. The integral action acts to reduce the accumulated error over time. The aim of control is to keep the actuator within the reference position. Thus, the error is defined as the difference between the real position and the reference position, as shown by Equation (
2). By combining proportional and integral actions, PI control provides a balance between responsiveness and stability, making it suitable for a wide range of control applications. The control function
u of the PI controller is shown in Equation (
3):
where
is the error,
x is the measured position,
is the reference position,
u is the control action, and
and
are the proportional and integral gain coefficients, respectively. The PI controller faces challenges in determining optimal proportional and integral gain coefficients and is susceptible to variations in system load. Tuning
and
requires understanding system dynamics and often involves trial and error or advanced methods. Load variations can lead to deviations from desired set points, causing oscillations or slow responses. Despite challenges, the PI controller remains popular due to its simplicity and effectiveness in various industrial applications.
2.5. ANN
The challenges faced by traditional PEA models in accurately representing system dynamics are multifaceted. One of the primary issues arises from the presence of asymmetric effects, which can introduce non-linearities into the system’s behavior. Additionally, the complexity of model implementation often necessitates sophisticated mathematical formulations, leading to high computational demands. As a result, conventional PEA models may struggle to adequately capture the intricacies of system dynamics, particularly when confronted with real-world complexities.
To address these challenges, an alternative approach leveraging artificial neural networks (ANNs) has emerged. ANNs offer a powerful tool for learning complex non-linear relationships directly from data, making them well-suited for modeling systems with hysteresis and other non-linear phenomena. By integrating an ANN into the control framework, the linearity and hysteresis dynamics can be effectively compensated for, enhancing the accuracy and robustness of the model. The ANN adaptively compensates the control signal based on the system’s current state and past history. By learning from the system’s behavior, the ANN can effectively compensate for hysteresis and non-linearities, improving the overall performance of the control system.
Identifying hysteresis using artificial neural networks (ANNs) typically involves architectures capable of capturing non-linear relationships and memory effects. Recurrent neural networks (RNNs)—particularly, long short-term memory (LSTM) networks—are often suitable for this task due to their ability to retain information over time. LSTM networks can effectively model temporal dependencies, making them suitable for capturing hysteresis behavior, which involves the system’s response being influenced by its historical states. Additionally, gated recurrent unit (GRU) networks, a variant of RNNs similar to LSTMs, can also be used for hysteresis identification. GRUs have a simpler architecture compared to LSTMs but still possess memory capabilities that allow them to capture temporal dependencies effectively. Overall, RNN architectures like LSTMs and GRUs are commonly preferred for identifying hysteresis due to their ability to model complex temporal relationships, making them suitable for tasks involving memory and non-linear dynamics.
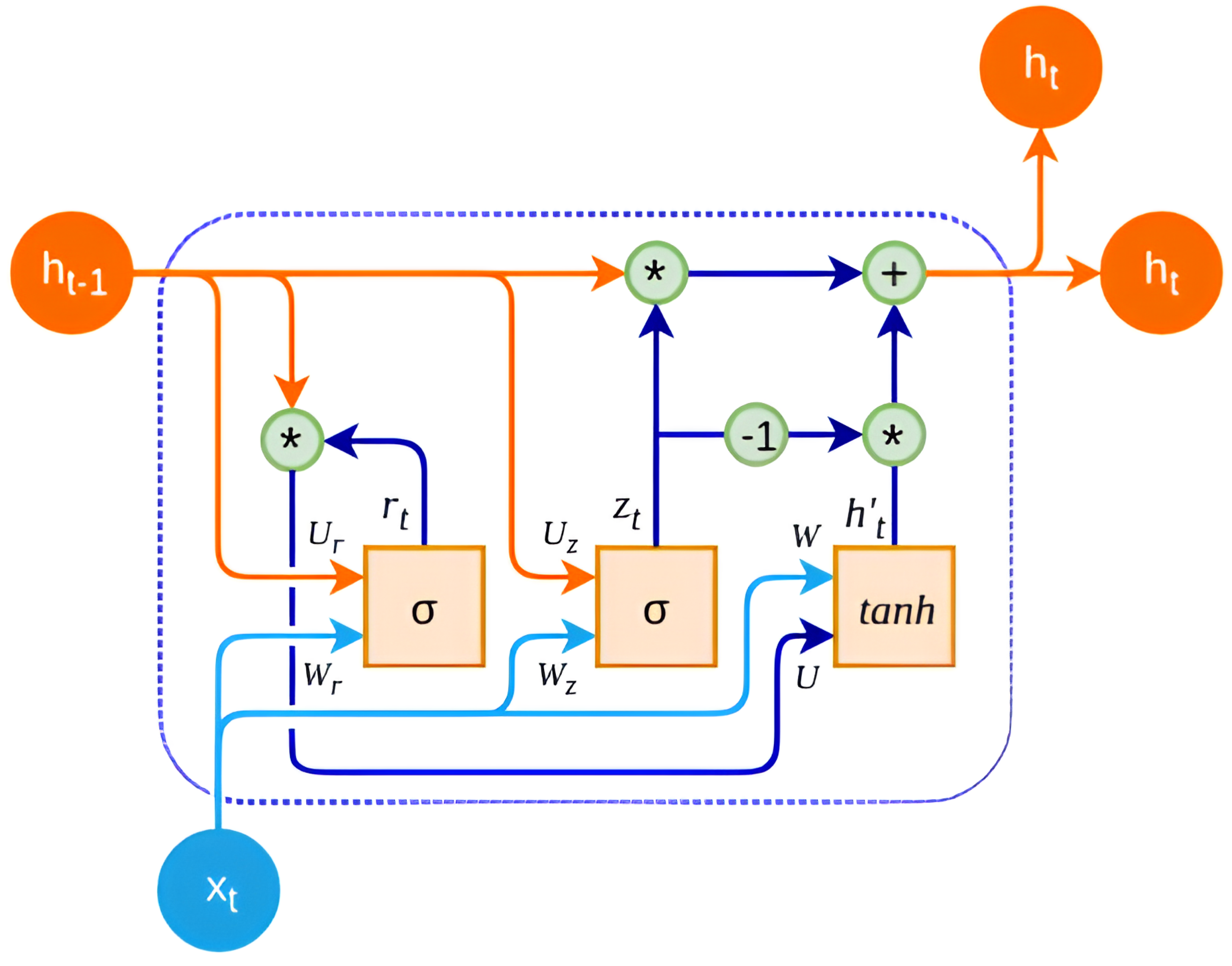
For this research a GRU-based RNN was selected due to its ability to effectively model temporal dependencies in the data while mitigating issues like over-fitting and vanishing gradients. Additionally, GRUs have been shown to perform well in various sequence modeling tasks, including non-linear modeling, natural language processing, and time series prediction. The GRU-based LRNN structure has four layers formed by the input layer, GRU layer, as shown in
Figure 4, fully connected layer, and an output regression layer. GRUs contain gating mechanisms that control the flow of information within the network, allowing them to capture and retain relevant information over longer sequences. The key components of a GRU layer include the update gate (z), which determines how much of the previous hidden state to retain and how much of the new candidate activation to add to the hidden state; the reset gate (r), which controls how much of the previous hidden state to forget when computing the new candidate activation; the candidate activation, which is new memory content computed based on the input at the current time step and the previous hidden state and serves as a candidate for updating the current hidden state; and the hidden state (h), representing the memory of the network at each time step and updated based on the candidate activation controlled by the update gate.
2.6. ANN-Based IFTSMC
IFTSMC, or intermittent feedback terminal sliding mode control, represents a novel approach to terminal sliding mode control developed by Venkataraman and Gulati [
47] at the Jet Propulsion Laboratory. Unlike traditional sliding mode control techniques, IFTSMC is characterized by its non-linearity and robustness. This innovative approach combines the advantages of integral control and terminal sliding mode control and offers robust performance, finite-time convergence, and enhanced tracking accuracy.
The integration of integral action ensures steady-state precision by eliminating steady-state error, while the terminal sliding mode component enables rapid convergence to the desired trajectory, even in the presence of uncertainties and disturbances. This unique combination makes IFTSMC well-suited for a wide range of applications, including aerospace, robotics, power systems, and renewable energy.
The control law
in IFTSMC comprises two distinct terms: a discontinuous term
, which is responsible for maintaining the system on the sliding surface, and an equivalent term
, which is designed to drive the system towards the sliding surface [
48]. The combined command law, expressed by Equations (
5) and (
6), encapsulates the control action necessary for reducing the tracking error in Equation (
4):
where
represents the output of the ANN, and the term
comprises both the equivalent and the discontinuous components.
The discontinuous term
is defined in Equation (
7), while calculation of the equivalent term is done later on in Equation (
19).
where
s is the sliding surface, and K must be a positive constant.
The sliding surface
s is represented in Equation (
8):
where
t is the time at the moment, and
,
,
p, and
q are positive constants, with
being satisfied.
Stability Proof
The PEA is considered as a second-order mechanical system [
49] as in Equation (
9):
where
m is the mass,
b is the damping,
k is the stiffness,
x is the position,
d is the piezoelectric coefficient,
is the hysteresis,
u is the input voltage, and
P is the uncertainties, unmodeled dynamics, and perturbations. The piezoelectric coefficient
d is defined as the product of the stiffness and the maximum displacement divided by the maximum driving voltage.
The control signal is designated by Equation (
5). The term
contains a linear part and the hysteresis, so it can be decomposed as in Equation (
10):
The term
is analogous to
in Equation (
9). The term
can be defined as the mechanical system without taking into account hysteresis or perturbations, as in Equation (
11):
where
is the reference position.
Replacing it in Equation (
10)
gives Equation (
12):
Combining the control signal from Equation (
12) in Equation (
9) gives Equation (
13) as follows:
where
.
The error is defined as
in Equation (
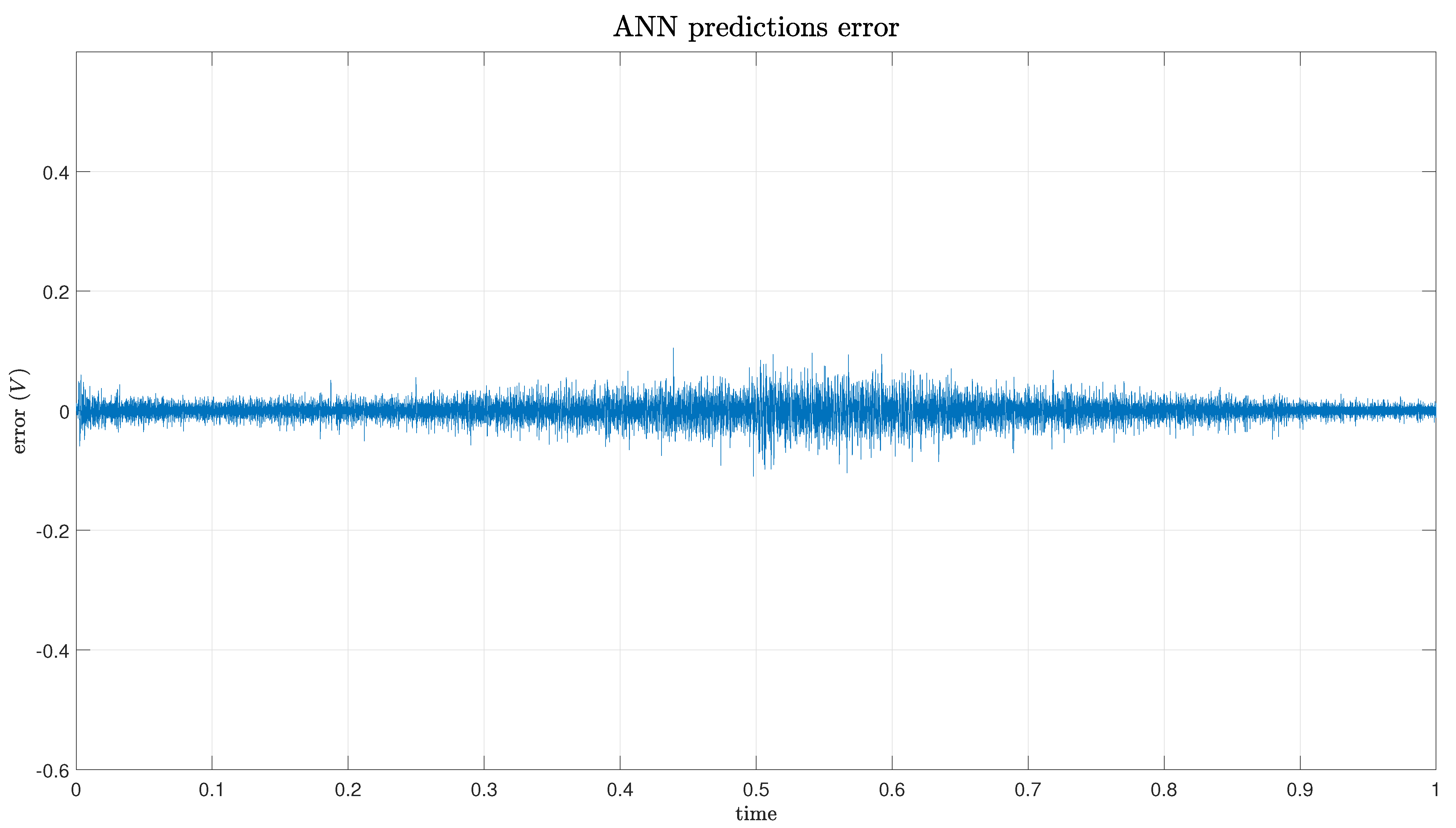
4), and there will always be a difference between what the ANN predicts and the actual outcomes. This error is a natural part of the learning process for ANNs and arises due to various factors such as the complexity of the problem being tackled and the limitations of the network architecture. This error is defined with
in Equation (
14) as the difference between the ANN’s prediction of the hysteresis and the actual hysteresis. This simplifies Equation (
13) in Equation (
15):
From Equation (
15), we can obtain the second derivative of the error in Equation (
16):
The sliding surface defined in Equation (
8) is derived to obtain Equation (
17). Then, Equation (
16) is substituted in (
17) to obtain Equation (
18):
To simplify Equation (
17), all the uncertainties are encapsulated under the term
:
From Equation (
17), we obtain the term
when
, as shown in Equation (
19):
The obtained control law can be analyzed with the Lyapunov theory of stability. If there exists a positive definite function
so that
,
,
, and
, the dynamical system is asymptotically stable. Therefore, a Lyapunov candidate function that satisfies the requirements is proposed in Equation (
20):
The derivative of the above Equation is expressed in Equation (
21), and we substitute
from Equation (
17):
As
, it can be replaced in Equation (
21) to obtain Equation (
22):
By replacing Equation (
19) in the expression above, we obtain Equation (
23):
Therefore, it can be established that to satisfy the condition , the switching constant must be . The conventional use of the function often introduces a phenomenon known as the chattering effect, which is characterized by rapid and erratic switching between control actions. In order to mitigate this effect, a common approach is to replace the function with a hyperbolic tangent function . The hyperbolic tangent function provides a smooth transition between positive and negative values of s, thus reducing abrupt changes in control signals. By introducing a parameter , the sensitivity of the hyperbolic tangent function can be adjusted to achieve the desired level of smoothing.
4. Conclusions
The integration of micro-actuators into industrial environments has revolutionized high-precision positioning, expanding its applications beyond academic domains. Piezoelectric actuators (PEAs) have emerged as indispensable components in various fields and facilitate precise control and manipulation of mechanical systems. Despite their advantages, PEAs also present challenges, such as the necessity to create mathematical models for their non-linear behavior due to hysteresis, creep, and temperature sensitivity. Addressing these challenges is crucial for enhancing the accuracy and reliability of PEA-based systems. In this context, robust controllers offer stability and performance amidst uncertainties and disturbances. This paper proposes an ANN-based IFTSMC controller for PEA positioning, addressing the need for accurate modeling of PEA dynamics.
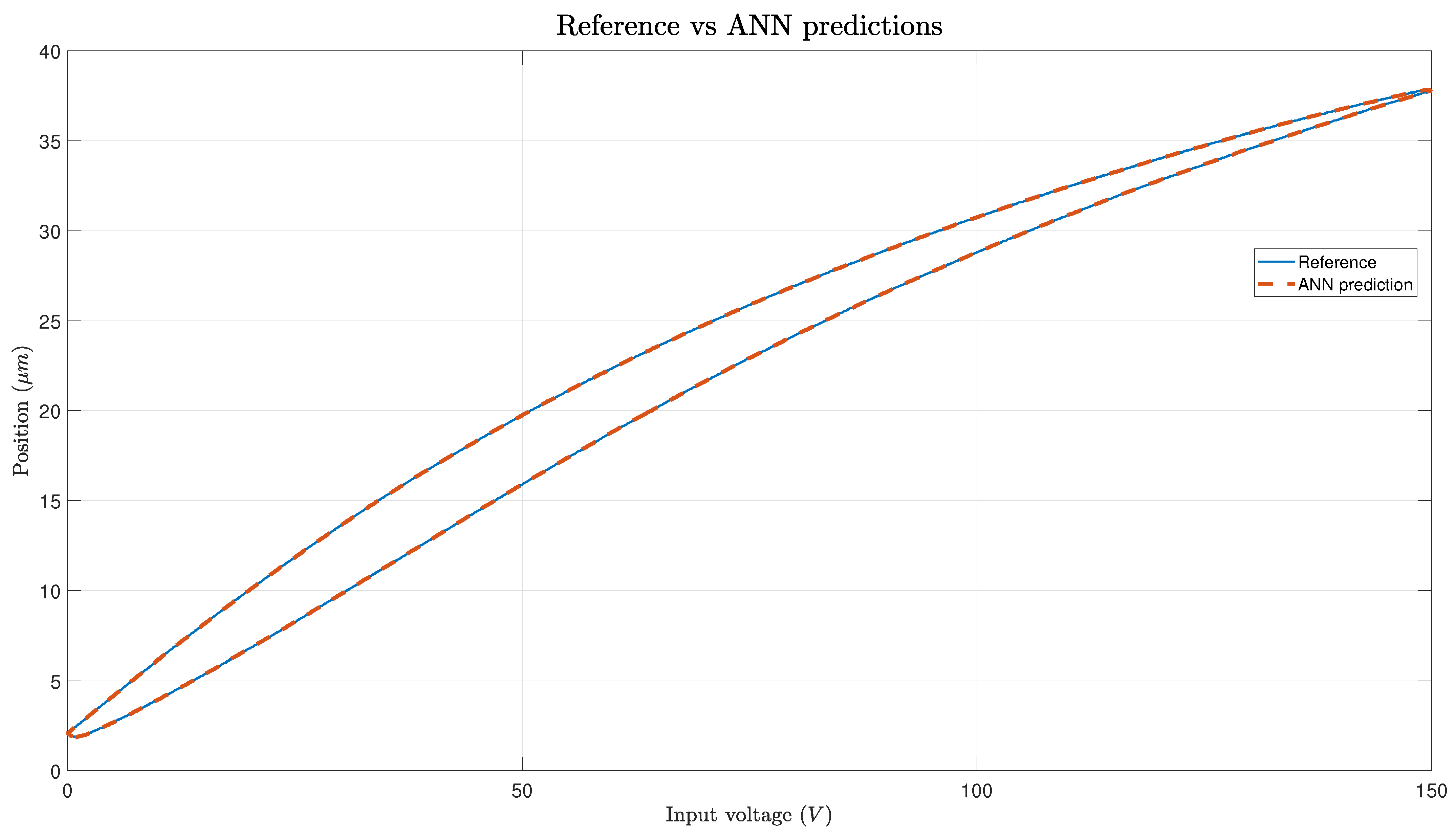
The recurrent artificial neural network (RNN) has demonstrated remarkable effectiveness in accurately modeling hysteresis behavior. By leveraging its feedback connections, the RNN captures the inherent temporal dynamics in the hysteresis phenomena, achieving precise modeling of the complex non-linear relationships between input variables and output responses. This combination enables the controller to effectively mitigate uncertainties and disturbances, ensuring robust system behavior even in challenging operating conditions. Overall, the utilization of a recurrent ANN in conjunction with robust controllers represents a significant advancement in control system design and offers enhanced accuracy, stability, and resilience in real-world applications.
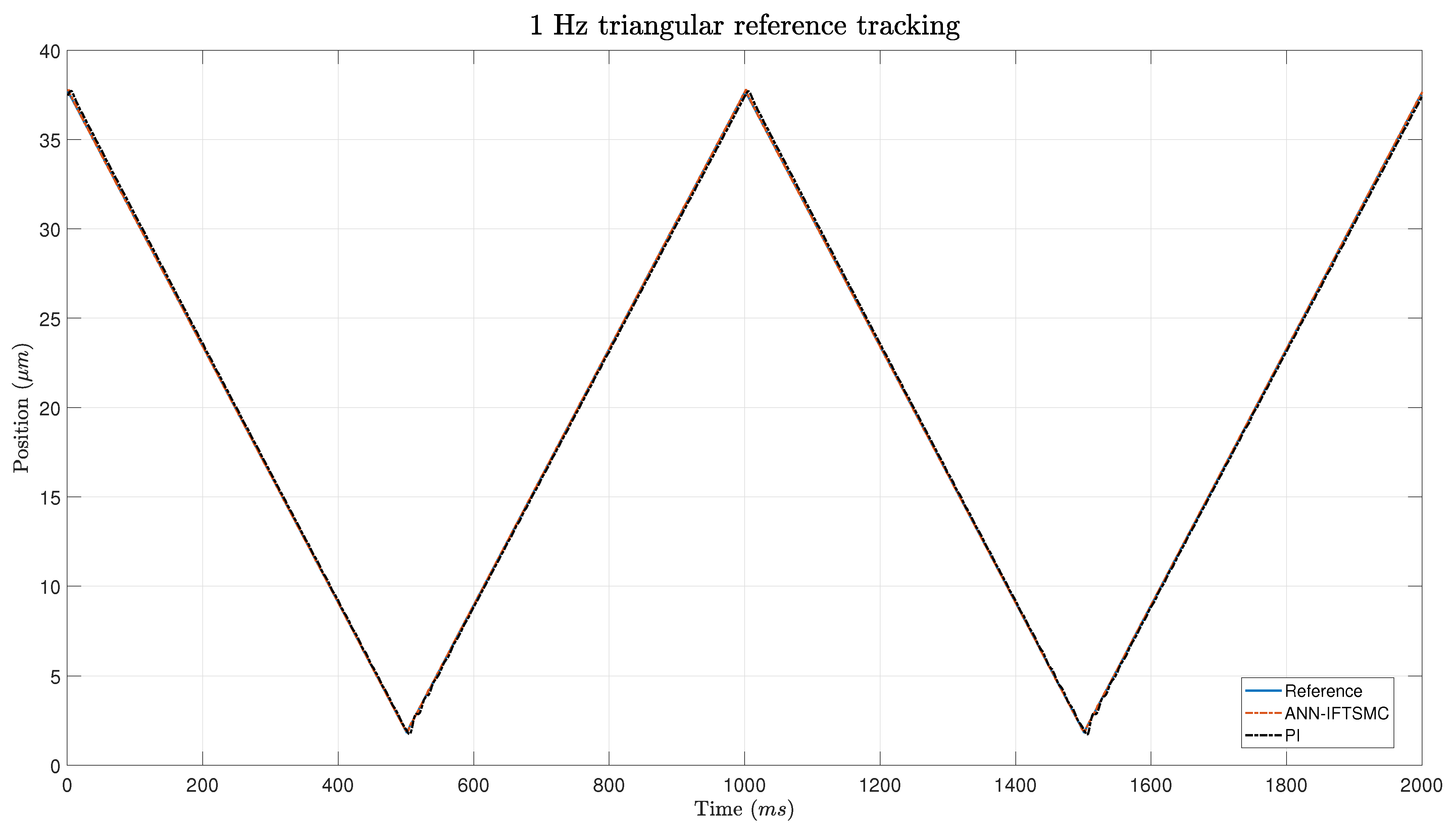
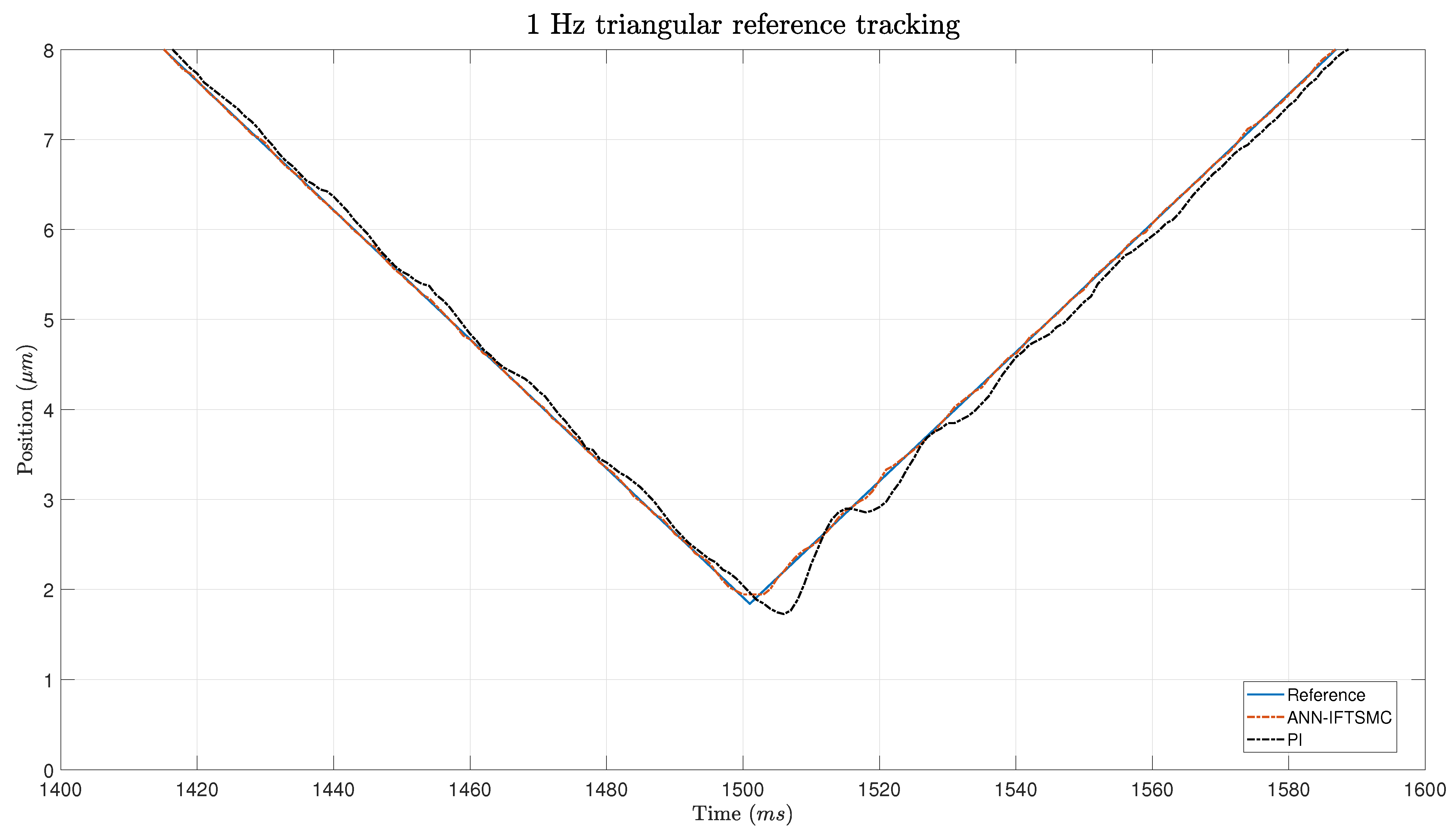
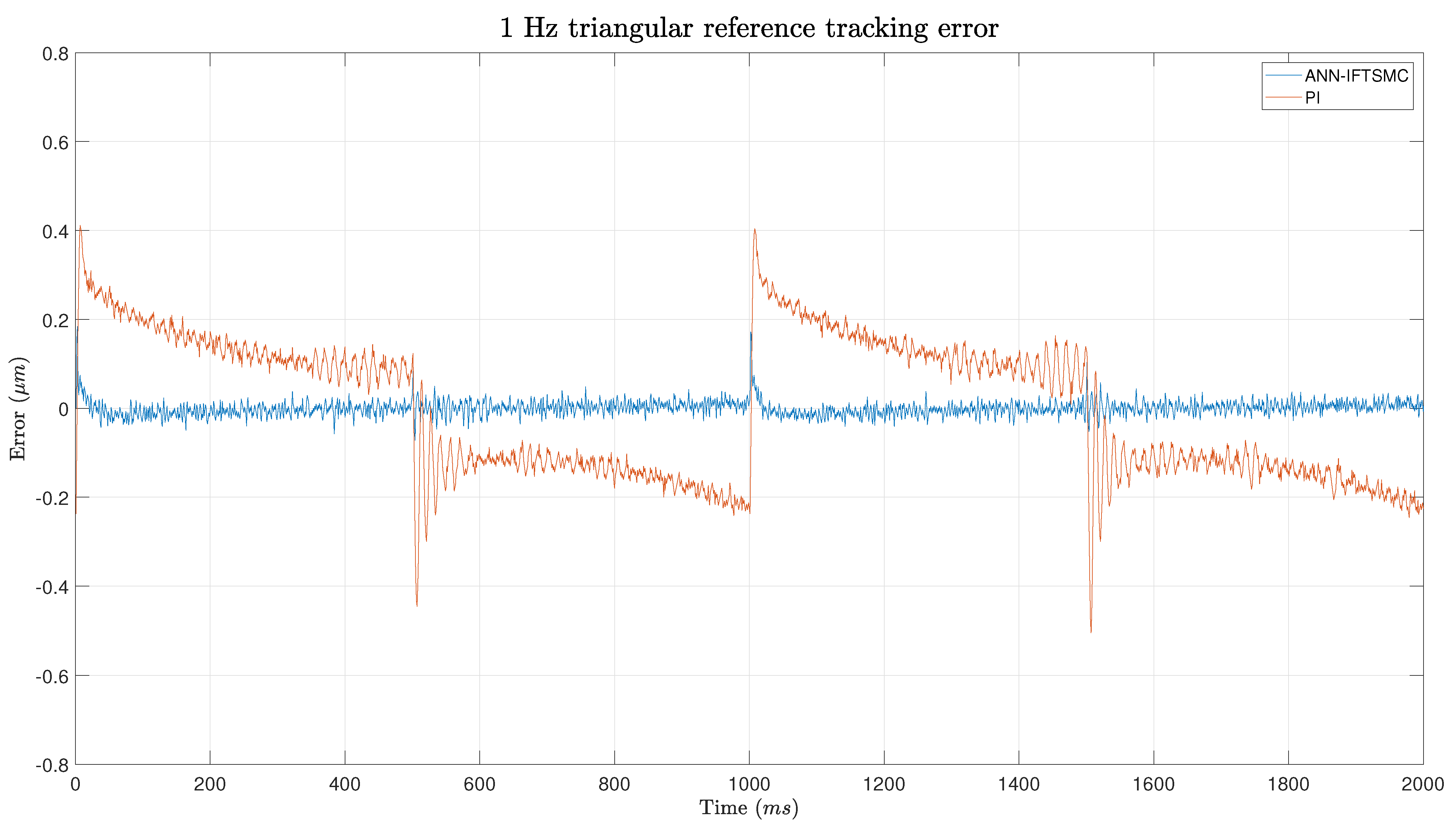
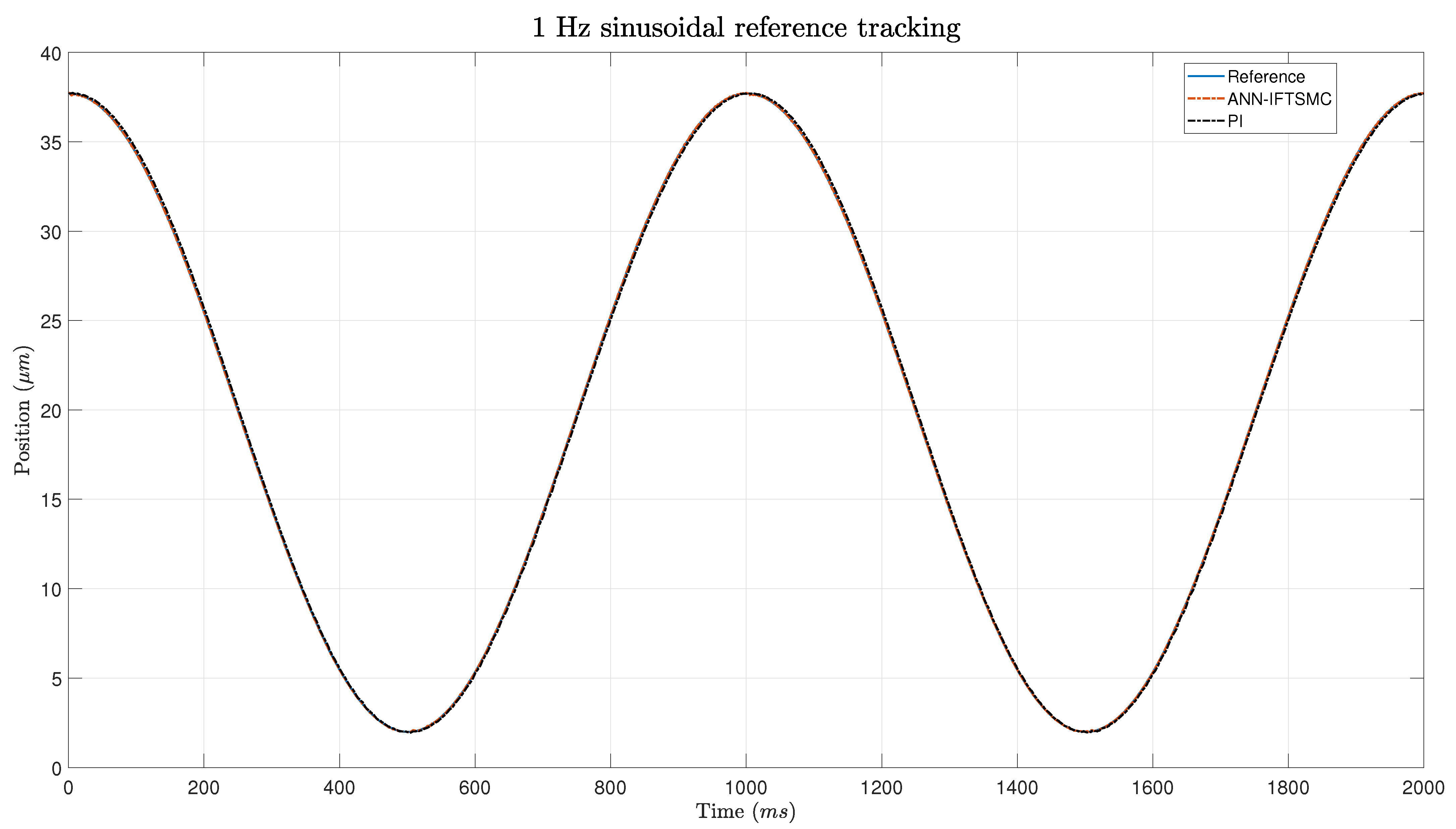
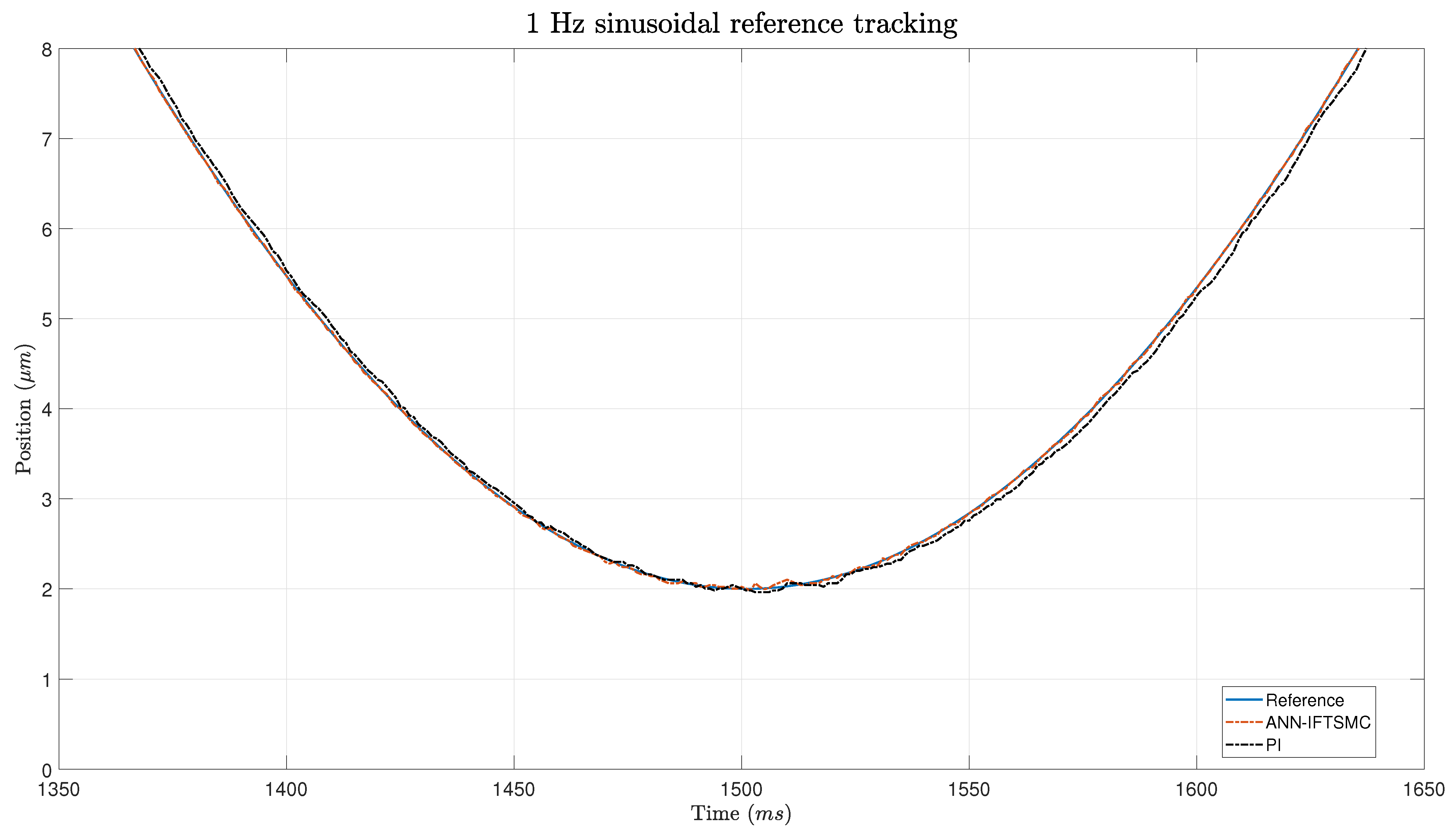
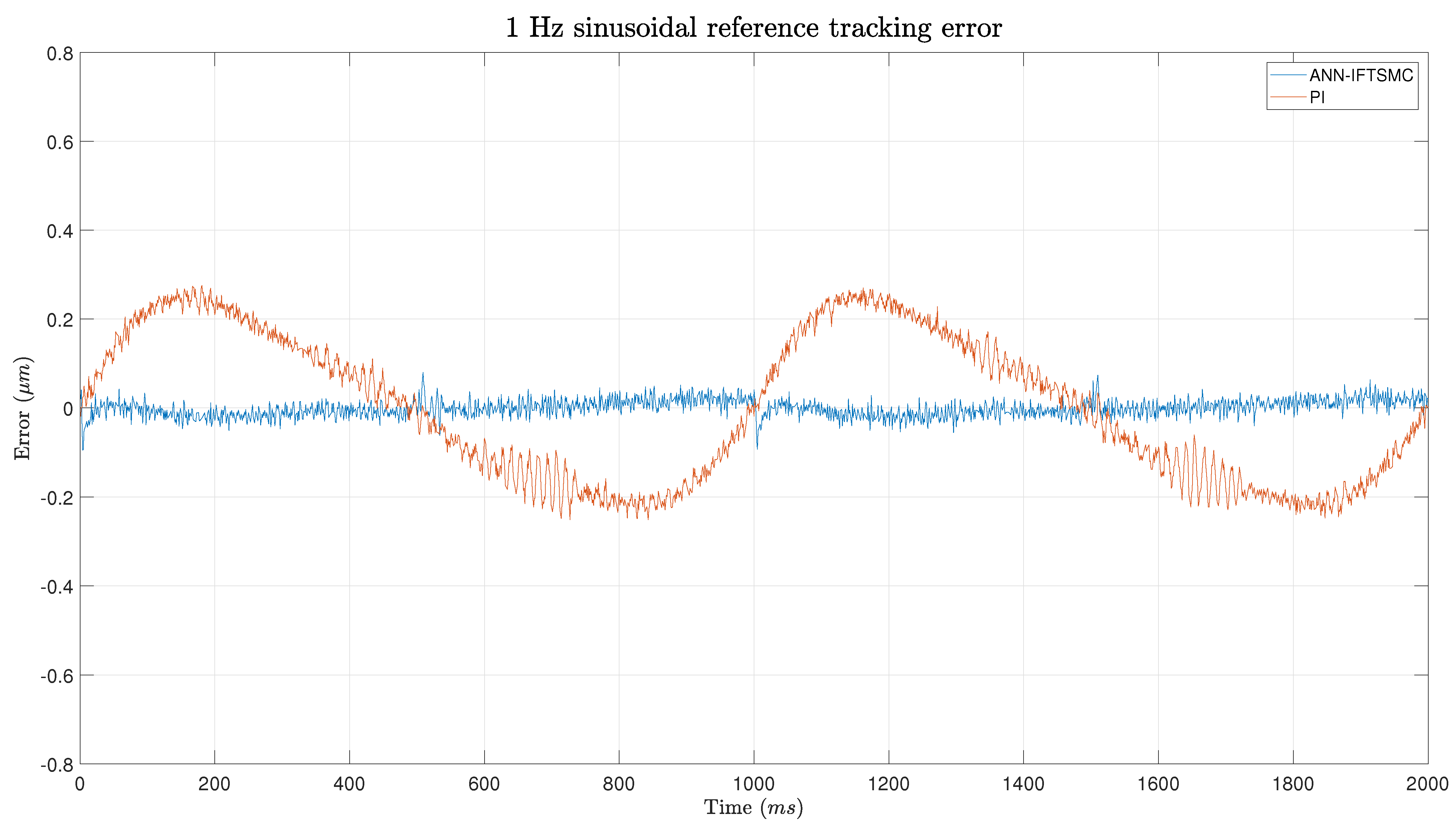
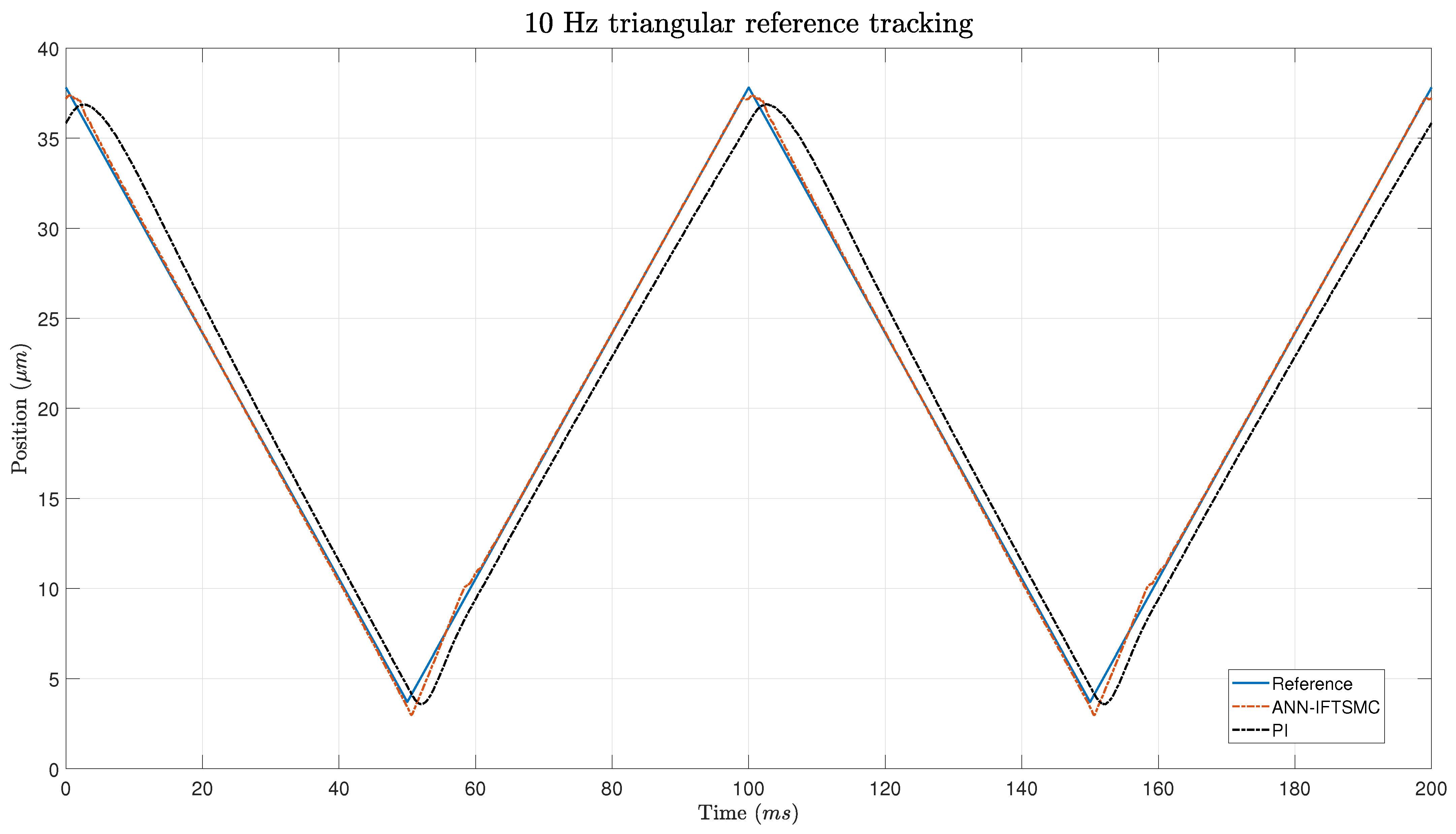
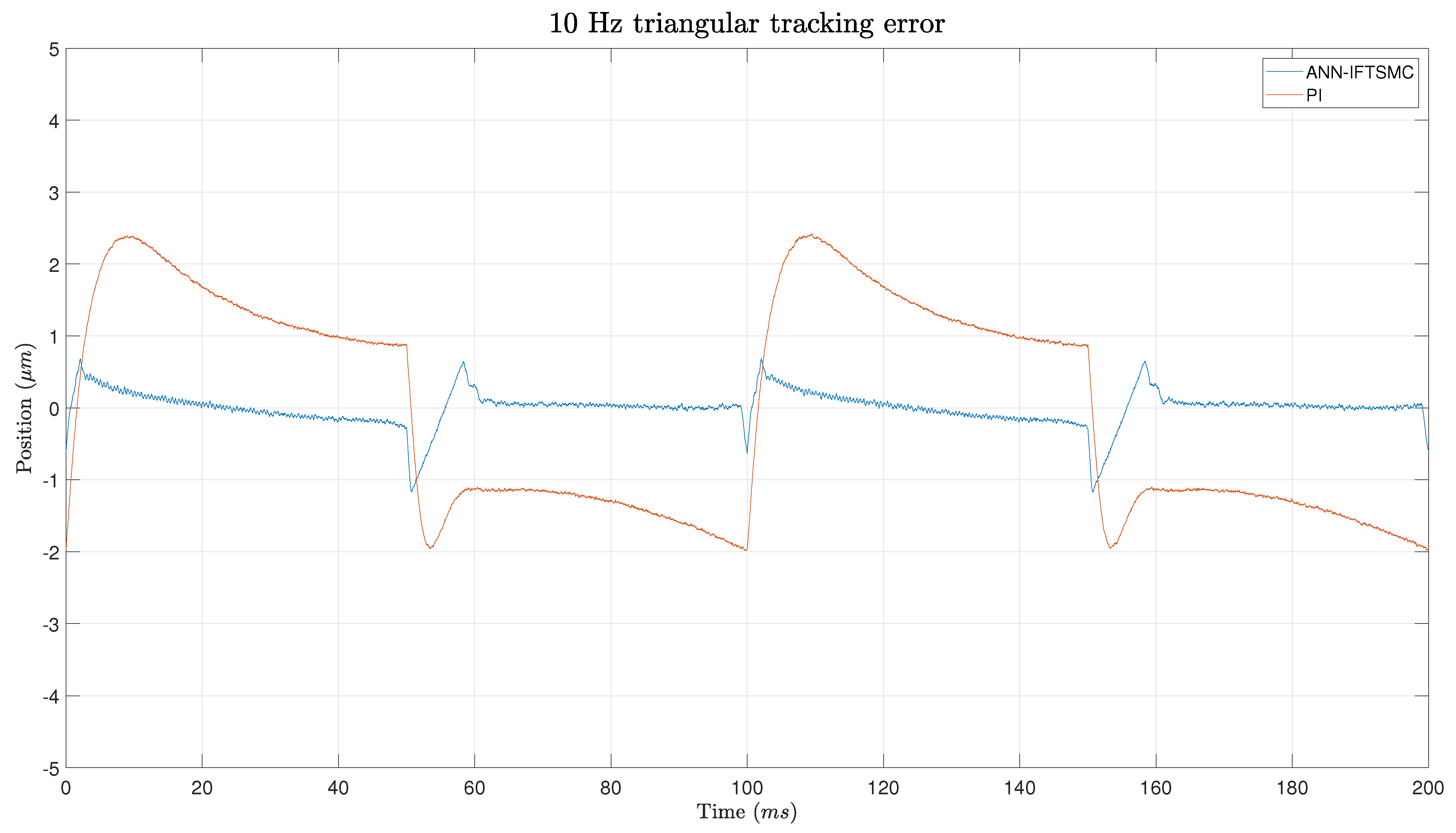
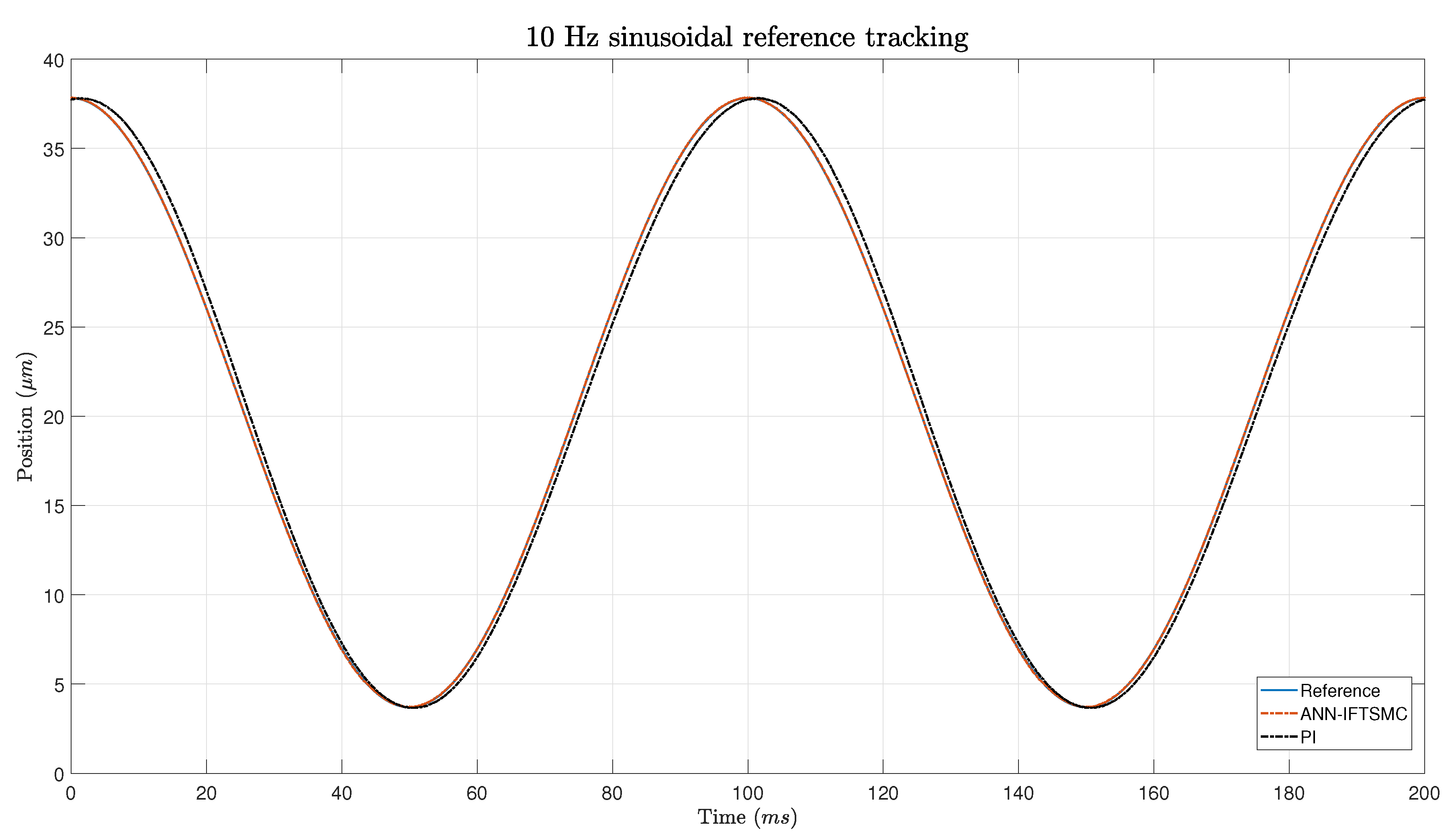
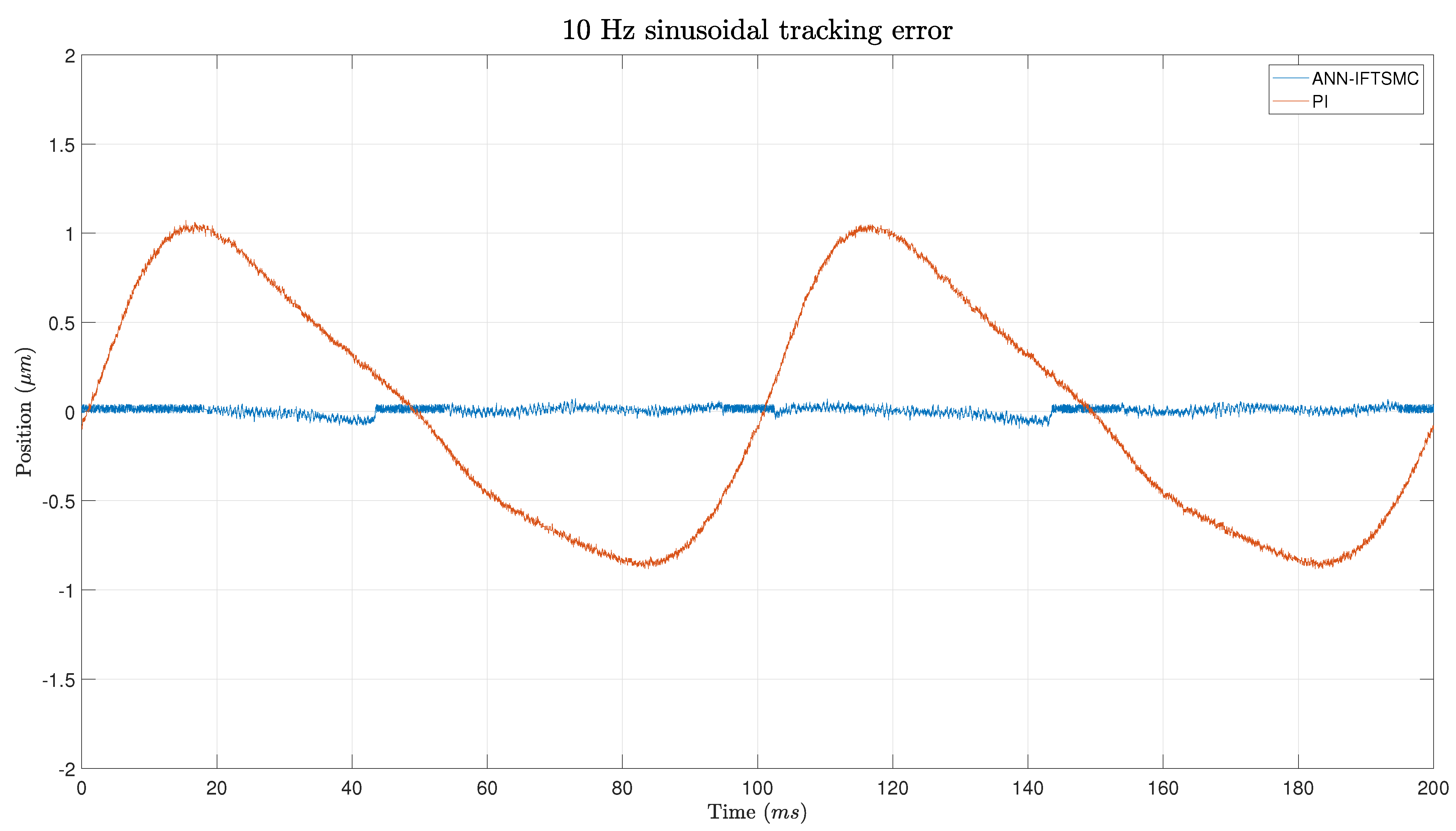
A Lyapunov stability proof was presented to unveil the theoretical underpinnings of the ANN-based IFTSMC controller. This analysis showed that the controller yields a stable response, contingent upon the IFTSMC satisfying specific conditions dictated by its gains. Subsequently, the experimental phase ensued, wherein the proposed control architectures were implemented and tested. The gains of each framework were tuned by leveraging a criterion based on minimizing the integral of absolute error (minIAE). During the experiments, considerable attention was given to ensuring stability. The objective was successfully met, as no unstable responses were observed. Regarding the controller performance in reference tracking, the ANN-based IFTSMC showed remarkable performance compared to the PI controller. Both controllers achieved better results when tracking sinusoidal references rather than triangular ones. The smooth transitions of the sinusoidal signal facilitate controller operation. Nevertheless, the ANN-based IFTSMC achieved 8- to 9-fold better performance than the PI controller. At slope changes within triangular reference signals, the disparities between the controllers become particularly pronounced. However, during the intervals of straight sections between these slopes, the discrepancies between the two controllers diminish significantly. This observation suggests that, while the controllers may diverge in their responses during rapid changes in the slope, they converge in their performance during relatively steady-state conditions. The performance metrics show 5.6- to 11-fold better performance for the ANN-based IFTSMC on triangular references.
Future research endeavors will explore several options to enhance the performance of the ANN-based IFTSMC. One approach involves employing a more sophisticated ANN architecture, as the current design is relatively shallow. Adopting a deep learning approach could potentially yield improvements, although this would necessitate careful consideration of real-time implementation feasibility due to potentially increased computational demands during training. Additionally, enhancements to the IFTSMC itself are under consideration. While the current gains were optimized through parameter minimization and stability conditions, there is potential for further refinement by implementing adaptive algorithms, such as fuzzy-logic- or neural-network-based approaches. These adaptive algorithms could offer improved adaptability and responsiveness to dynamic system conditions [
50,
51].






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}