
Light-Responsive Soft Robot Integrating Actuation and Function Based on Laser Cutting
 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Preparation of CNT-PDMS Composite Films
2.3. Preparation of CNT-PDMS/PDMS/PI Three-Layer Composite Film
2.4. Characterization and Measurement
3. Results and Discussion
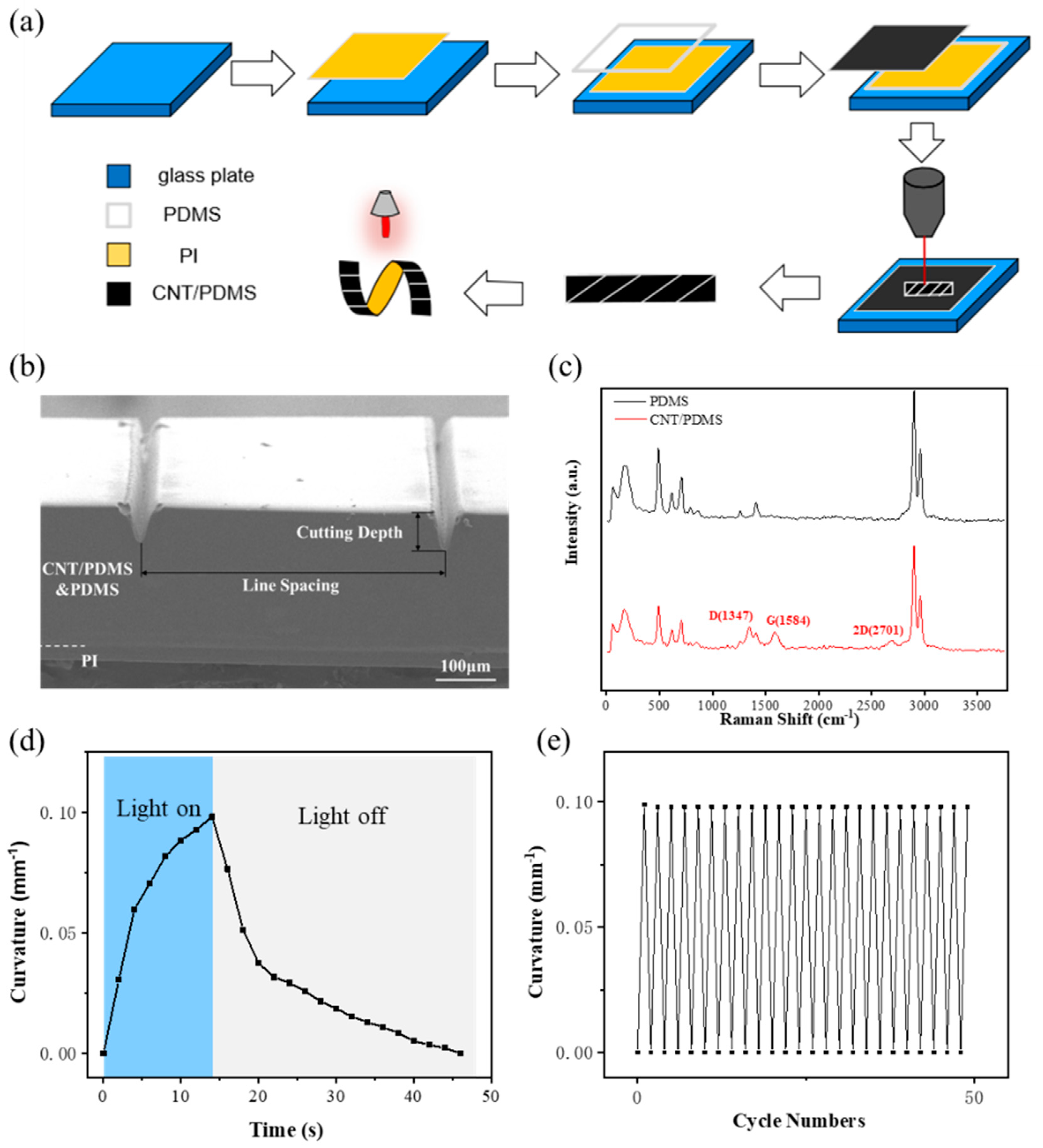
3.1. Morphology Characterization and Light Actuation of CNT-PDMS/PDMS/PI Three-Layer Film
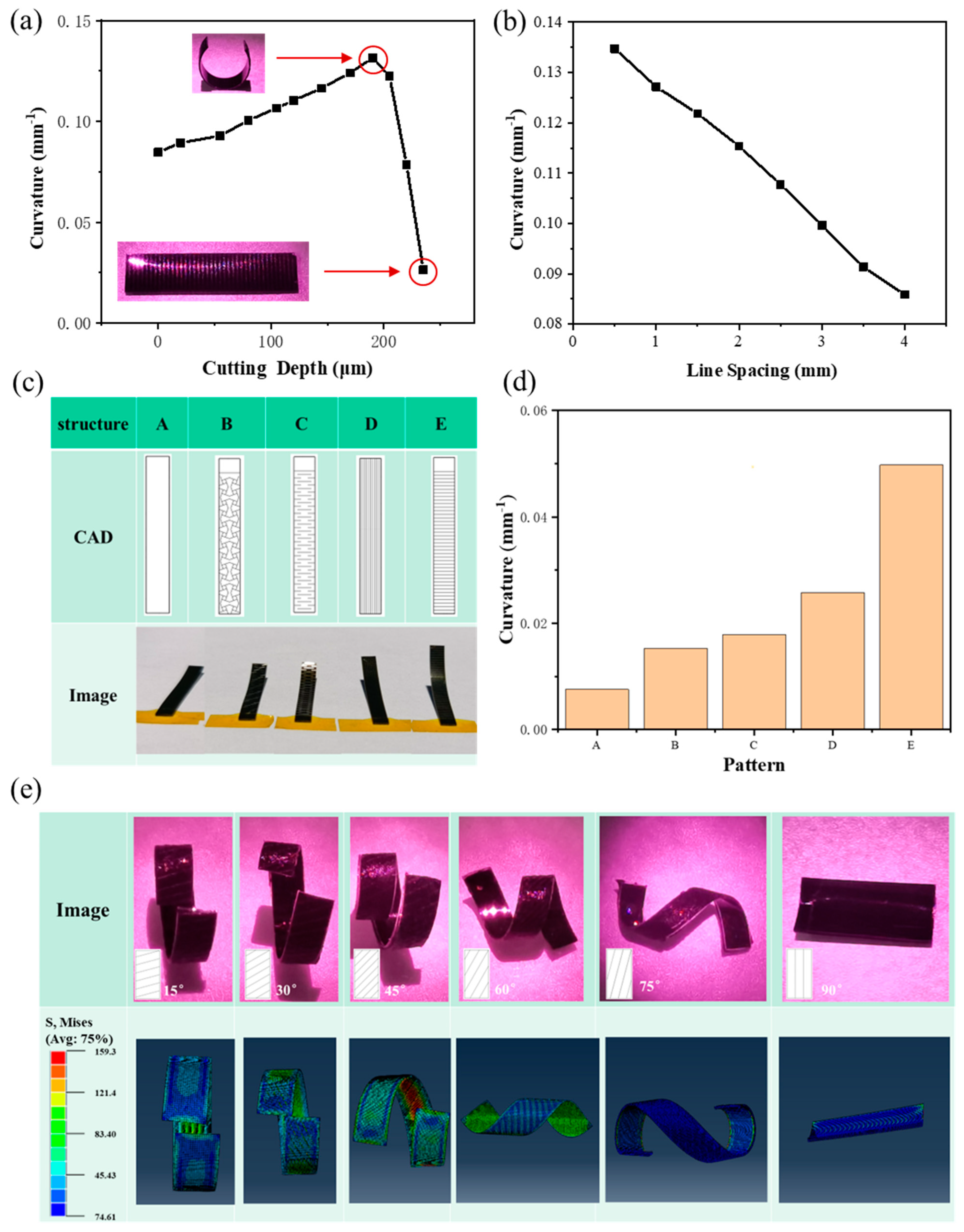
3.2. Effect of Laser Cutting on Bending Performance of CNT-PDMS/PDMS/PI Actuator
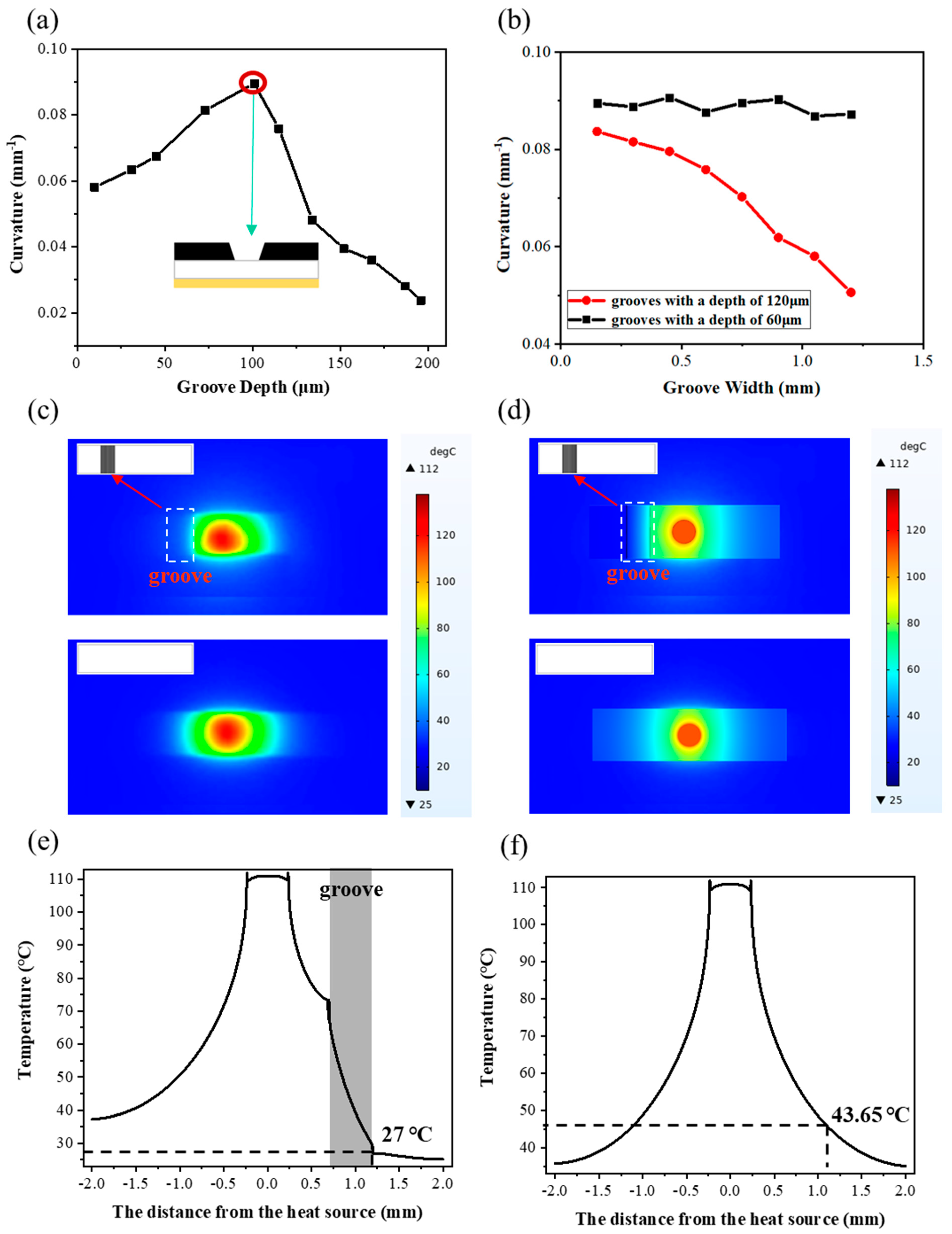
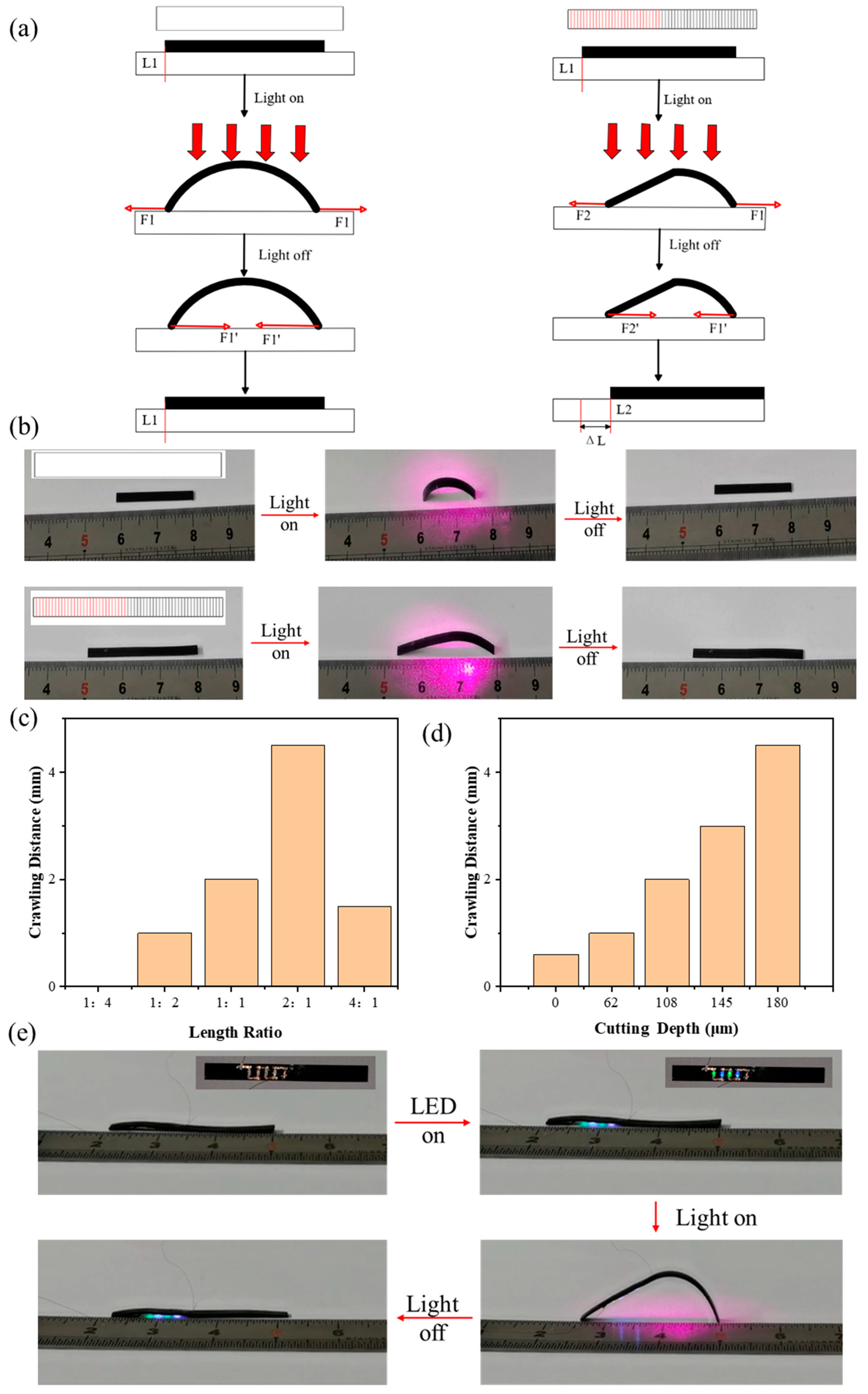
3.3. Effect of Groove on Bending Performance of CNT-PDMS/PDMS/PI Actuator
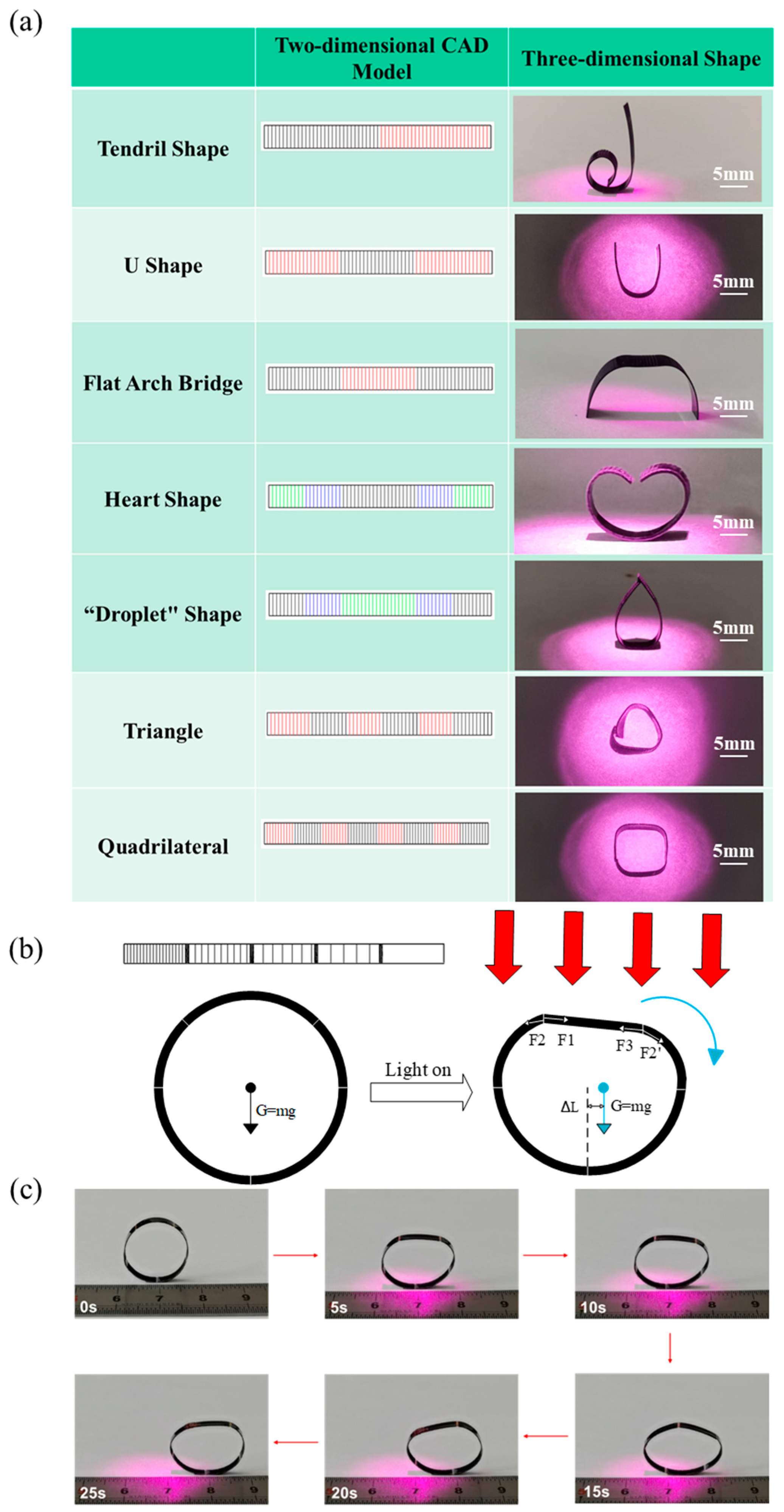
4. Practical Applications of CNT-PDMS/PDMS/PI Actuator
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yu, K.; Ji, X.; Yuan, T.; Cheng, Y.; Li, J.; Hu, X.; Liu, Z.; Zhou, X.; Fang, L. Robust Jumping Actuator with a Shrimp-Shell Architecture. Adv. Mater. 2021, 33, e2104558. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Ji, D.; Yang, X.; Zhou, X.; Yin, Z. 4D printing of bilayer structures with programmable shape-shifting behavior. J. Mater. Sci. 2022, 57, 21309–21323. [Google Scholar] [CrossRef]
- Zou, Y.; Huang, Z.; Li, X.; Lv, P. 4D Printing Pre-Strained Structures for Fast Thermal Actuation. Front. Mater. 2021, 8, 661999. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, H.; Chen, R.; Zhao, L.; Wu, H.; Wang, C.; Hu, Y. A Bioinspired Programmable Soft Bilayer Actuator Based on Aluminum Exoskeleton. Adv. Mater. Technol. 2022, 7, 2200036. [Google Scholar] [CrossRef]
- Wang, W.; Lee, J.Y.; Rodrigue, H.; Song, S.H.; Chu, W.S.; Ahn, S.H. Locomotion of inchworm-inspired robot made of smart soft composite (SSC). Bioinspir. Biomim. 2014, 9, 046006. [Google Scholar] [CrossRef] [PubMed]
- Niu, S.; Luo, Y.; Shen, Y.; Kim, K.J. Enabling earthworm-like soft robot development using bioinspired IPMC-scissor lift actuation structures: Design, locomotion simulation and experimental validation. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 499–504. [Google Scholar]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef] [PubMed]
- Deng, J.; Li, J.; Chen, P.; Fang, X.; Sun, X.; Jiang, Y.; Weng, W.; Wang, B.; Peng, H. Tunable Photothermal Actuators Based on a Pre-programmed Aligned Nanostructure. J. Am. Chem. Soc. 2016, 138, 225–230. [Google Scholar] [CrossRef]
- Deng, H.; Zhang, C.; Su, J.W.; Xie, Y.; Zhang, C.; Lin, J. Bioinspired multi-responsive soft actuators controlled by laser tailored graphene structures. J. Mater. Chem. B 2018, 6, 5415–5423. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Zhao, J.; Weng, C.; Wang, T.; Liu, Y.; Han, Z.; Zhang, Z. A bidirectionally reversible light-responsive actuator based on shape memory polyurethane bilayer. Compos. Part A Appl. Sci. Manuf. 2021, 144, 106322. [Google Scholar] [CrossRef]
- Peng, Y.; He, P.; Guo, R.; Lin, L. Bioinspired light-driven soft robots by a facile two-mode laser engraving and cutting process. In Proceedings of the 2021 21st International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), Online, 20–25 June 2021; pp. 10–13. [Google Scholar]
- Mariani, S.; Cecchini, L.; Mondini, A.; Del Dottore, E.; Ronzan, M.; Filippeschi, C.; Pugno, N.M.; Sinibaldi, E.; Mazzolai, B. A Bioinspired Plasmonic Nanocomposite Actuator Sunlight-Driven by a Photothermal-Hygroscopic Effect for Sustainable Soft Robotics. Adv. Mater. Technol. 2023, 8, 2202166. [Google Scholar] [CrossRef]
- Tan, M.W.M.; Bark, H.; Thangavel, G.; Gong, X.; Lee, P.S. Photothermal modulated dielectric elastomer actuator for resilient soft robots. Nat. Commun. 2022, 13, 6769. [Google Scholar] [CrossRef] [PubMed]
- Chang, L.; Wang, D.; Huang, Z.; Wang, C.; Torop, J.; Li, B.; Wang, Y.; Hu, Y.; Aabloo, A. A Versatile Ionomer-Based Soft Actuator with Multi-Stimulus Responses, Self-Sustainable Locomotion, and Photoelectric Conversion. Adv. Funct. Mater. 2022, 33, 2212341. [Google Scholar] [CrossRef]
- Wang, S.; Gao, Y.; Wei, A.; Xiao, P.; Liang, Y.; Lu, W.; Chen, C.; Zhang, C.; Yang, G.; Yao, H.; et al. Asymmetric elastoplasticity of stacked graphene assembly actualizes programmable untethered soft robotics. Nat. Commun. 2020, 11, 4359. [Google Scholar] [CrossRef] [PubMed]
- Lai, Y.P.; Li, Z.; Naguib, H.; Diller, E. Hybrid Hydrogel-Magnet Actuators with pH-Responsive Hydrogels for Gastrointestinal Microrobots. Adv. Eng. Mater. 2023, 25, 2301060. [Google Scholar] [CrossRef]
- Bao, J.; Wang, Z.; Song, C.; Zhang, Y.; Li, Z.; Zhang, L.; Lan, R.; Yang, H. Shape-Programmable Liquid-Crystalline Polyurethane-Based Multimode Actuators Triggered by Light-Driven Molecular Motors. Adv. Mater. 2023, 35, e2302168. [Google Scholar] [CrossRef] [PubMed]
- Song, X.; Wu, H.; Zhang, Y.; Zhang, G.; Xue, H.; Gao, J. Multifunctional superhydrophobic coatings for controllable self-propelled motion. Colloids Surf. A Physicochem. Eng. Asp. 2023, 673, 131737. [Google Scholar] [CrossRef]
- Yang, K.; Fu, C.; Li, C.; Ye, Y.; Ding, M.; Zhou, J.; Bai, Y.; Jiao, F.; Ma, J.; Guo, Q.; et al. Dual-responsive smart actuator based on Ti3C2Tx/polymer bilayer structure for bionic applications. Sens. Actuators A Phys. 2022, 341, 113553. [Google Scholar] [CrossRef]
- Ma, W.; Kwan, K.W.; Wu, R.; Ngan, A.H.W. High-performing, linearly controllable electrochemical actuation of c-disordered δ-MnO2/Ni actuators. J. Mater. Chem. A 2021, 9, 6261–6273. [Google Scholar] [CrossRef]
- Bernat, J.; Kołota, J.; Gajewski, P.; Marcinkowska, A. Dielectric elastomer actuator biased by magnetorheological elastomer with permanent magnet. Smart Mater. Struct. 2023, 32, 095029. [Google Scholar] [CrossRef]
- Hu, Y.; Ying, J.Y. Reconfigurable A-motif, i-motif and triplex nucleic acids for smart pH-responsive DNA hydrogels. Mater. Today 2023, 63, 188–209. [Google Scholar] [CrossRef]
- Wang, W.; Niu, Q.; Liu, X.; Su, L.; Zhang, J.; Meng, S.; Li, Z.; Zhang, Y.; Xiong, Q. Thermal responsive smart lanthanide luminescent hydrogel actuator. Opt. Mater. 2023, 142, 114147. [Google Scholar] [CrossRef]
- Dong, C.; Yue, X.; Zhang, Y.; Wang, Y.; Ren, Z.H.; Guan, Z.H. Synthesis of Self-healing and Light-, Thermal-, and Humidity-induced Deformative Polyurethane Actuator. Macromol. Rapid Commun. 2023, 44, e2300281. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; He, Y.; Leng, J. Regulated photo/thermal dual and programmable staged responsive shape memory poly(aryl ether ketone). J. Appl. Polym. Sci. 2023, 140, e54444. [Google Scholar] [CrossRef]
- Jiang, X.; Chen, K.; Long, Y.; Liu, S.; Chi, Z.; Xu, J.; Zhang, Y. Design and synthesis of vertical gradient of expansion structure based on polyimide humidity sensing layer with ultra-fast response, high sensitivity, and large deformation driven by humidity. Chem. Eng. J. 2023, 468, 143805. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, Y.; Zhang, J.; Zhang, D.; Zhou, X.; Xiong, J. Breathable Metal-Organic Framework Enhanced Humidity-Responsive Nanofiber Actuator with Autonomous Triboelectric Perceptivity. ACS Nano 2023, 17, 17920–17930. [Google Scholar] [CrossRef]
- Ma, H.; Jiang, Y.; Han, W.; Li, X. High wet-strength, durable composite film with nacre-like structure for moisture-driven actuators. Chem. Eng. J. 2023, 457, 457. [Google Scholar] [CrossRef]
- Yang, M.; Yuan, Z.; Liu, J.; Fang, Z.; Fang, L.; Yu, D.; Li, Q. Photoresponsive Actuators Built from Carbon-Based Soft Materials. Adv. Opt. Mater. 2019, 7, 1900069. [Google Scholar] [CrossRef]
- Chen, J.; Cao, Y.; Pei, J.; Zhao, H. Multifunctional Actuator Based on Graphene/PDMS Composite Materials with Shape Programmable Configuration and High Photothermal Conversion Capability. ACS Appl. Mater. Interfaces 2023, 15, 31917–31926. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Yang, J.; Zhang, X.; Feng, Y.; Zeng, H.; Wang, L.; Feng, W. Light-driven bimorph soft actuators: Design, fabrication, and properties. Mater. Horiz. 2021, 8, 728–757. [Google Scholar] [CrossRef]
- Tang, Z.; Gao, H.; Chen, X.; Zhang, Y.; Li, A.; Wang, G. Advanced multifunctional composite phase change materials based on photo-responsive materials. Nano Energy 2021, 80, 105454. [Google Scholar] [CrossRef]
- Jiao, Z.Z.; Zhou, H.; Han, X.C.; Han, D.D.; Zhang, Y.L. Photothermal responsive slippery surfaces based on laser-structured graphene@PVDF composites. J. Colloid. Interface Sci. 2023, 629, 582–592. [Google Scholar] [CrossRef] [PubMed]
- Ilami, M.; Bagheri, H.; Ahmed, R.; Skowronek, E.O.; Marvi, H. Materials, Actuators, and Sensors for Soft Bioinspired Robots. Adv. Mater. 2021, 33, e2003139. [Google Scholar] [CrossRef] [PubMed]
- Xavier, M.S.; Tawk, C.D.; Zolfagharian, A.; Pinskier, J.; Howard, D.; Young, T.; Lai, J.; Harrison, S.M.; Yong, Y.K.; Bodaghi, M.; et al. Soft Pneumatic Actuators: A Review of Design, Fabrication, Modeling, Sensing, Control and Applications. IEEE Access 2022, 10, 59442–59485. [Google Scholar] [CrossRef]
- Henke, E.M.; Schlatter, S.; Anderson, I.A. Soft Dielectric Elastomer Oscillators Driving Bioinspired Robots. Soft Robot. 2017, 4, 353–366. [Google Scholar] [CrossRef] [PubMed]
- Cao, G.; Liu, Y.; Jiang, Y.; Zhang, F.; Bian, G.; Owens, D.H. Observer-based continuous adaptive sliding mode control for soft actuators. Nonlinear Dyn. 2021, 105, 371–386. [Google Scholar] [CrossRef]
- Cao, G.; Huo, B.; Yang, L.; Zhang, F.; Liu, Y.; Bian, G. Model-Based Robust Tracking Control Without Observers for Soft Bending Actuators. IEEE Robot. Autom. Lett. 2021, 6, 5175–5182. [Google Scholar] [CrossRef]
- Martinez, R.V.; Branch, J.L.; Fish, C.R.; Jin, L.; Shepherd, R.F.; Nunes, R.; Suo, Z.; Whitesides, G.M. Robotic tentacles with three-dimensional mobility based on flexible elastomers. Adv. Mater. 2013, 25, 205–212. [Google Scholar] [CrossRef] [PubMed]
- Ntagios, M.; Nassar, H.; Pullanchiyodan, A.; Navaraj, W.T.; Dahiya, R. Robotic Hands with Intrinsic Tactile Sensing via 3D Printed Soft Pressure Sensors. Adv. Intell. Syst. 2019, 2, 1900080. [Google Scholar] [CrossRef]
- Du, X.; Cui, H.; Xu, T.; Huang, C.; Wang, Y.; Zhao, Q.; Xu, Y.; Wu, X. Reconfiguration, Camouflage, and Color-Shifting for Bioinspired Adaptive Hydrogel-Based Millirobots. Adv. Funct. Mater. 2020, 30, 1909202. [Google Scholar] [CrossRef]
- Xie, Z.; Yuan, F.; Liu, Z.; Sun, Z.; Knubben, E.M.; Wen, L. A Proprioceptive Soft Tentacle Gripper Based on Crosswise Stretchable Sensors. IEEE/ASME Trans. Mechatron. 2020, 25, 1841–1850. [Google Scholar] [CrossRef]
- Gong, S.; Ding, Q.; Wu, J.; Li, W.B.; Guo, X.Y.; Zhang, W.M.; Shao, L. Bioinspired Multifunctional Mechanoreception of Soft–Rigid Hybrid Actuator Fingers. Adv. Intell. Syst. 2022, 4, 2100242. [Google Scholar] [CrossRef]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M.; Uzel, S.G.; Wood, R.J.; Lewis, J.A. Soft Somatosensitive Actuators via Embedded 3D Printing. Adv. Mater. 2018, 30, e1706383. [Google Scholar] [CrossRef]
- Dong, H.; Yang, H.; Ding, S.; Li, T.; Yu, H. Bioinspired Amphibious Origami Robot with Body Sensing for Multimodal Locomotion. Soft Robot. 2022, 9, 1198–1209. [Google Scholar] [CrossRef] [PubMed]
- Ferrari, A.C. Raman spectroscopy of graphene and graphite: Disorder, electron–phonon coupling, doping and nonadiabatic effects. Solid. State Commun. 2007, 143, 47–57. [Google Scholar] [CrossRef]
- Wang, W.; Xiang, C.; Zhu, Q.; Zhong, W.; Li, M.; Yan, K.; Wang, D. Multistimulus Responsive Actuator with GO and Carbon Nanotube/PDMS Bilayer Structure for Flexible and Smart Devices. ACS Appl. Mater. Interfaces 2018, 10, 27215–27223. [Google Scholar] [CrossRef] [PubMed]
- Timoshenko, S. Analysis of Bi-Metal Thermostats. J. Opt. Soc. Am. 1925, 11, 233–255. [Google Scholar] [CrossRef]
- Yang, Y.; Guo, Z.; Liu, W. Robust mussel-inspired superhydrophobic sponge with eco-friendly photothermal effect for crude oil/seawater separation. J. Hazard. Mater. 2023, 461, 132592. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, B.; Liu, C.; Zhang, Y.; Tan, Y.; Tian, X.; Cui, Y.; Deng, Y. Light-Responsive Soft Robot Integrating Actuation and Function Based on Laser Cutting. Micromachines 2024, 15, 534. https://doi.org/10.3390/mi15040534
Jia B, Liu C, Zhang Y, Tan Y, Tian X, Cui Y, Deng Y. Light-Responsive Soft Robot Integrating Actuation and Function Based on Laser Cutting. Micromachines. 2024; 15(4):534. https://doi.org/10.3390/mi15040534
Chicago/Turabian StyleJia, Ben, Changbo Liu, Yi Zhang, Yujin Tan, Xuecheng Tian, Yuanyuan Cui, and Yuan Deng. 2024. "Light-Responsive Soft Robot Integrating Actuation and Function Based on Laser Cutting" Micromachines 15, no. 4: 534. https://doi.org/10.3390/mi15040534
APA StyleJia, B., Liu, C., Zhang, Y., Tan, Y., Tian, X., Cui, Y., & Deng, Y. (2024). Light-Responsive Soft Robot Integrating Actuation and Function Based on Laser Cutting. Micromachines, 15(4), 534. https://doi.org/10.3390/mi15040534