
A Novel Temperature Drift Error Estimation Model for Capacitive MEMS Gyros Using Thermal Stress Deformation Analysis


Abstract
1. Introduction
2. Methodology
2.1. Precise TDE Traceability
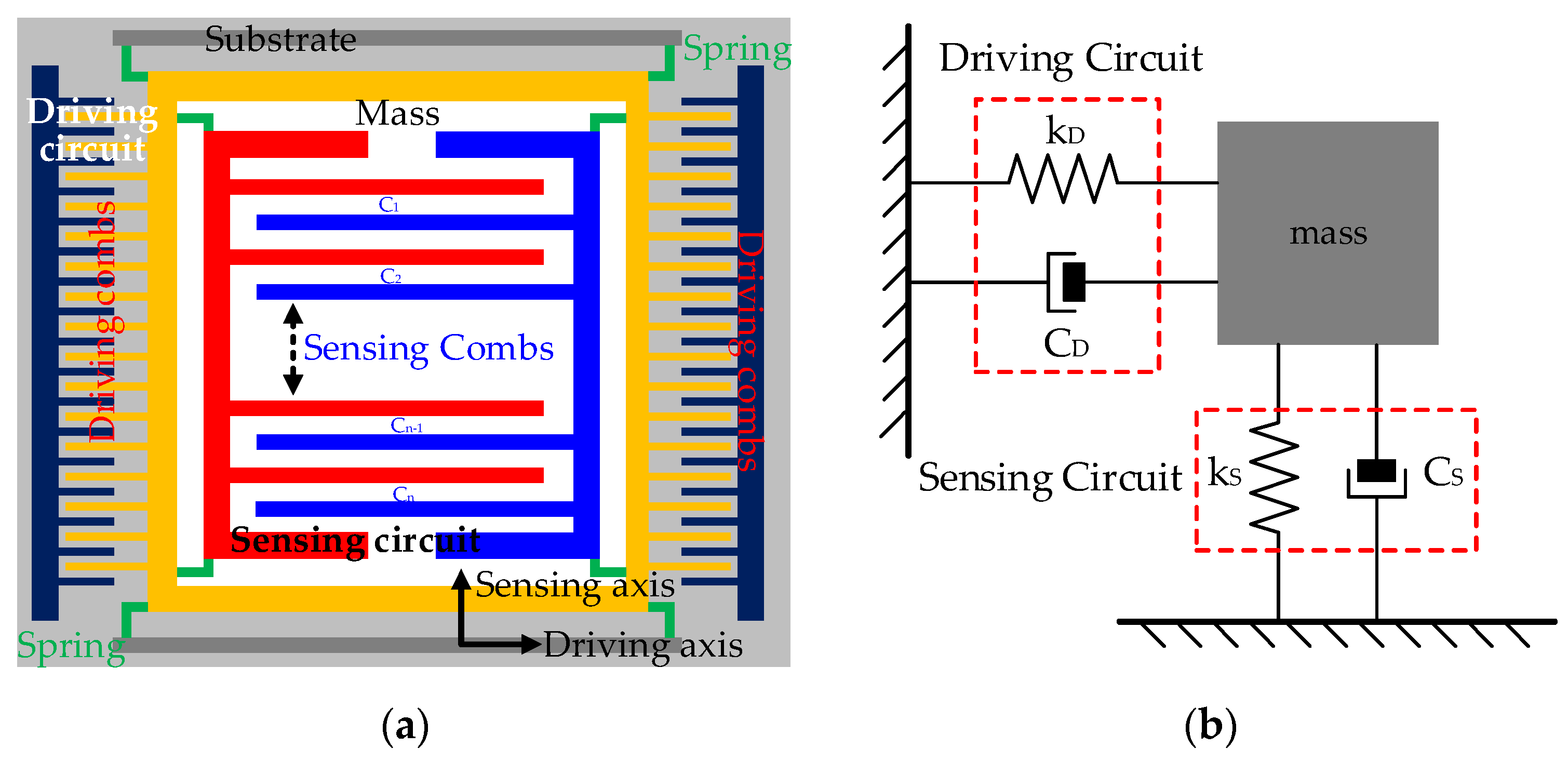
2.1.1. Conventional TDE Estimation Model
2.1.2. A Novel TDE Estimation Model with Thermal Stress Deformation Analysis
- (a)
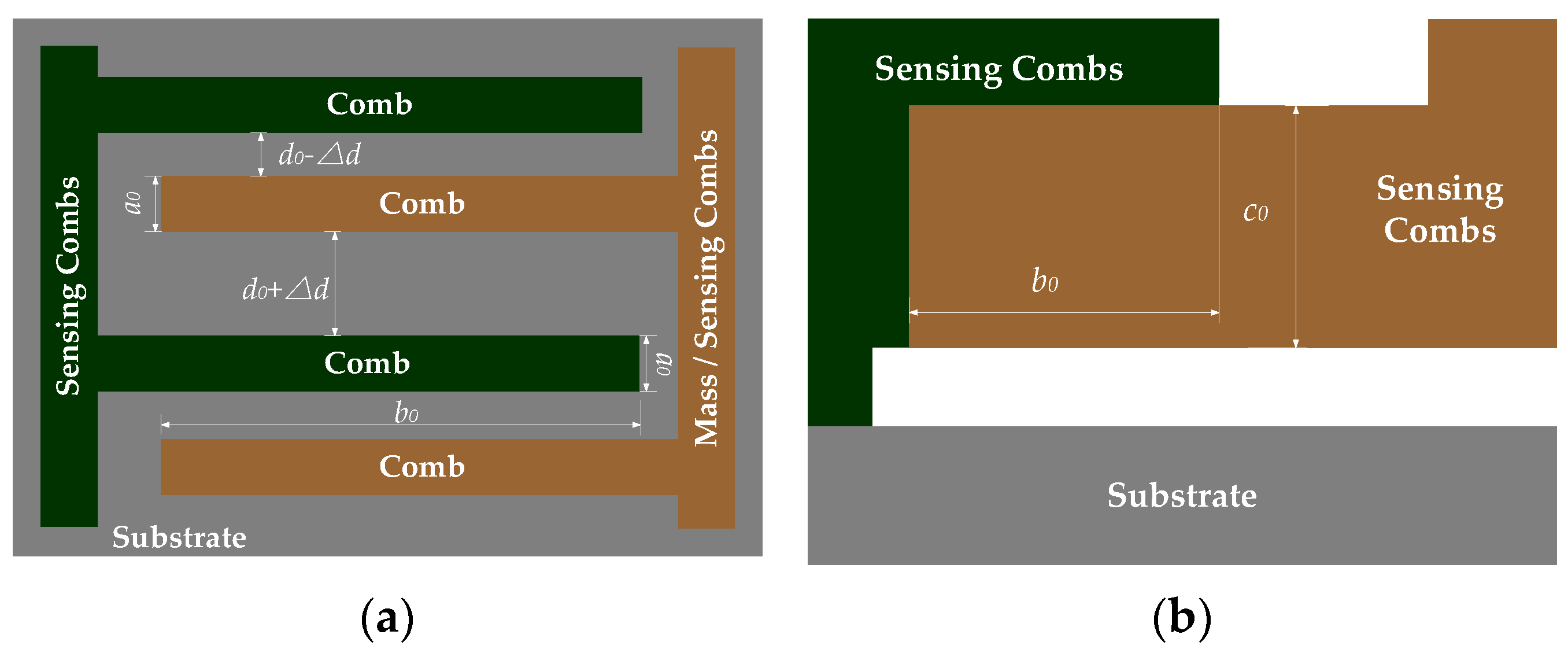
- Ambient temperature T = T0 and angular velocity ω = ω0
- (b)
- Ambient temperature T = T1 and angular velocity ω = ω0
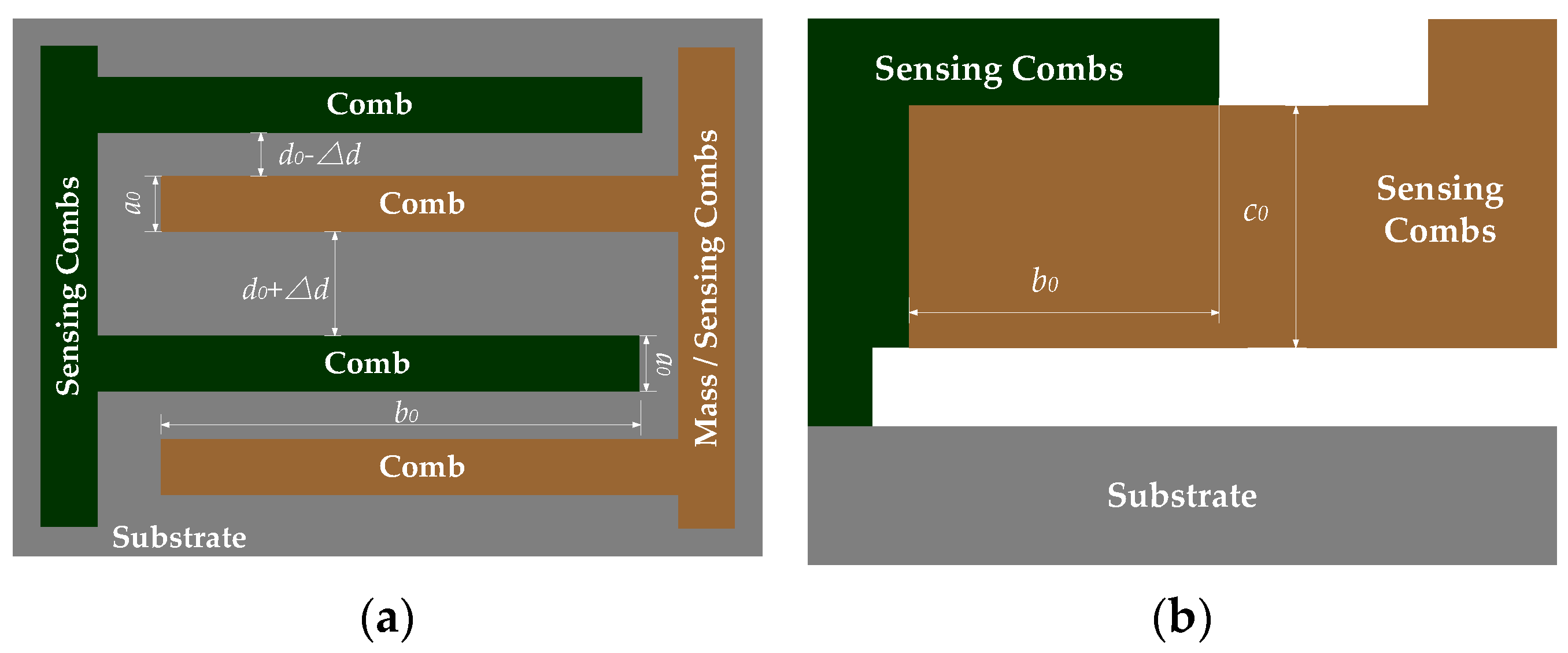
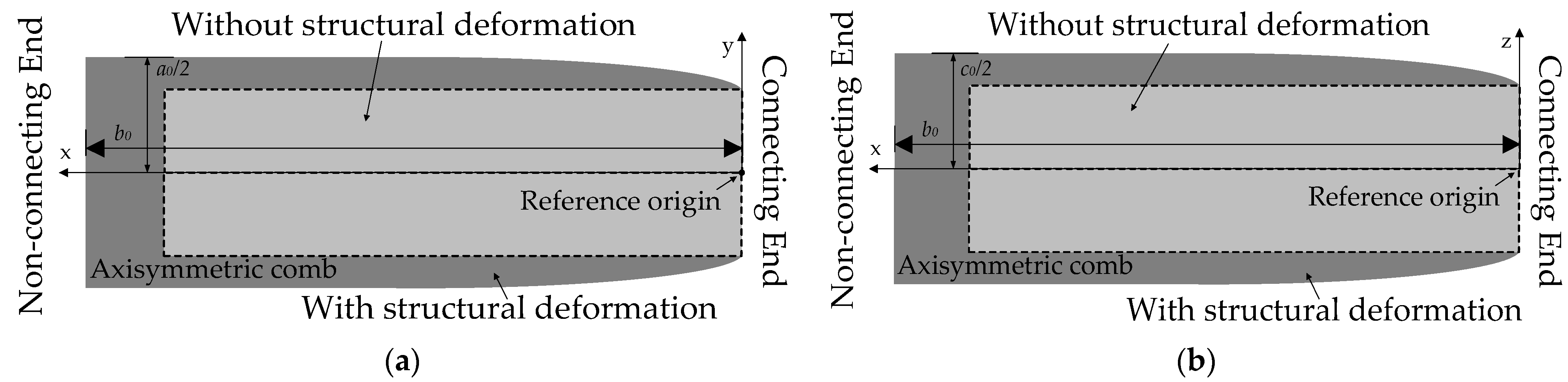
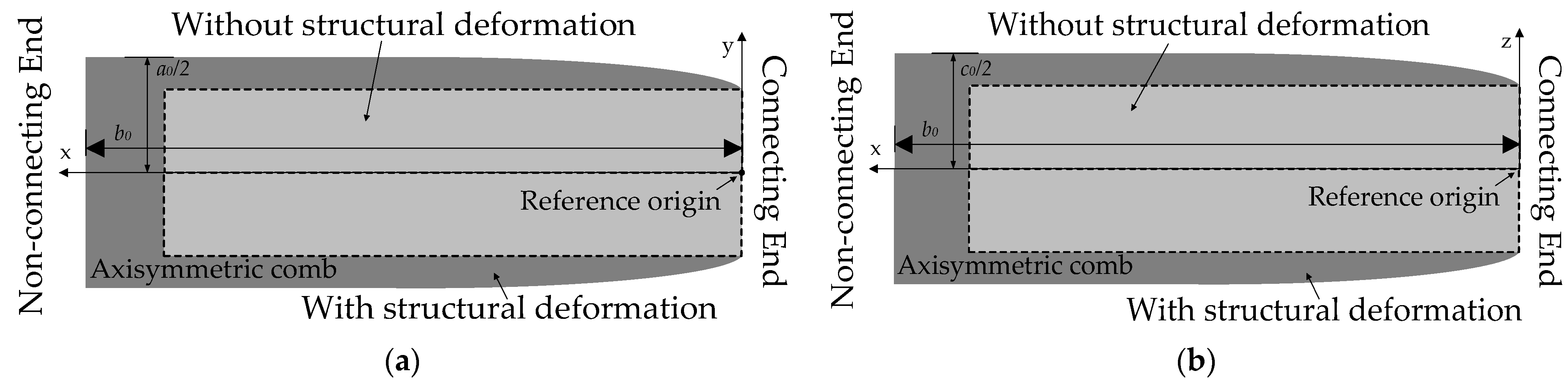
- Thermal stress from the connecting ends limits sensing combs to deform laterally, like its width and thickness, and it is useless for longitudinal structural deformation at all. So, its length deforms freely and can be calculated with a linear thermal expansion formula.
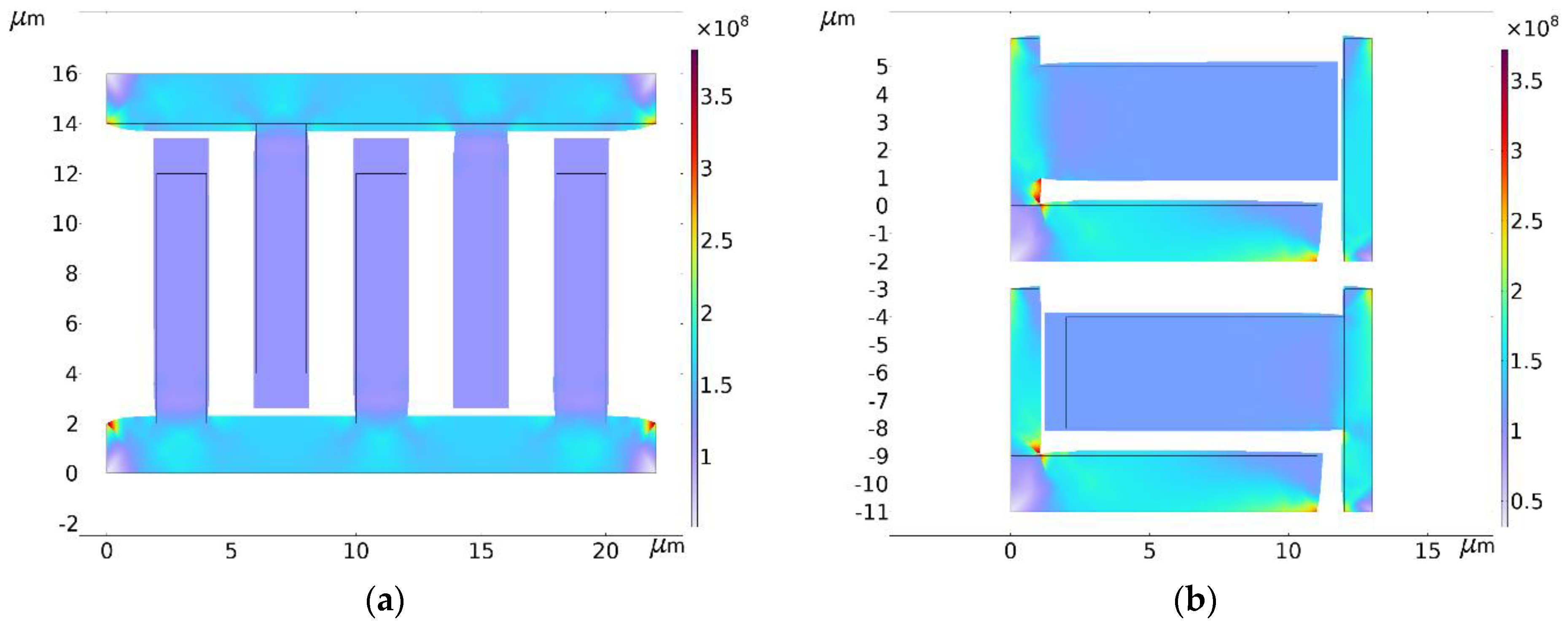
- Thermal stress from the connecting ends and free structural deformation of the non-connecting ends make sensing combs’ length vary in a curved line. Given that its width is bigger than its thickness in normal conditions, thermal stress to the width is also bigger than that to its thickness, which means the curve radian of the thickness varies more quickly than the width. Considering that sensing combs are arranged in a positive and negative way, the overlap area is represented as an approixmate rectangle whose length and width should be calculated with the linear thermal expansion formula.
- According to Figure 3, because the the curve radian of the thickness of the overlap area varies much more quickly than its width, the distance between the sensing combs is shown as a “wide-narrow-wide” pattern. It causes plate distance to vary nonlinearly. In a word, it should be calculated with a nonlinear expression.
2.2. Precise Parameter Identification for the Novel TDE Precise Estimation Model
2.2.1. TDE Accurate Acquisition Methodology
- (a)
- Heat conduction solutions
- (b)
- Precise temperature measurement system
- (c)
- Proper temperature control interval
- (d)
- Reasonable temperature control period
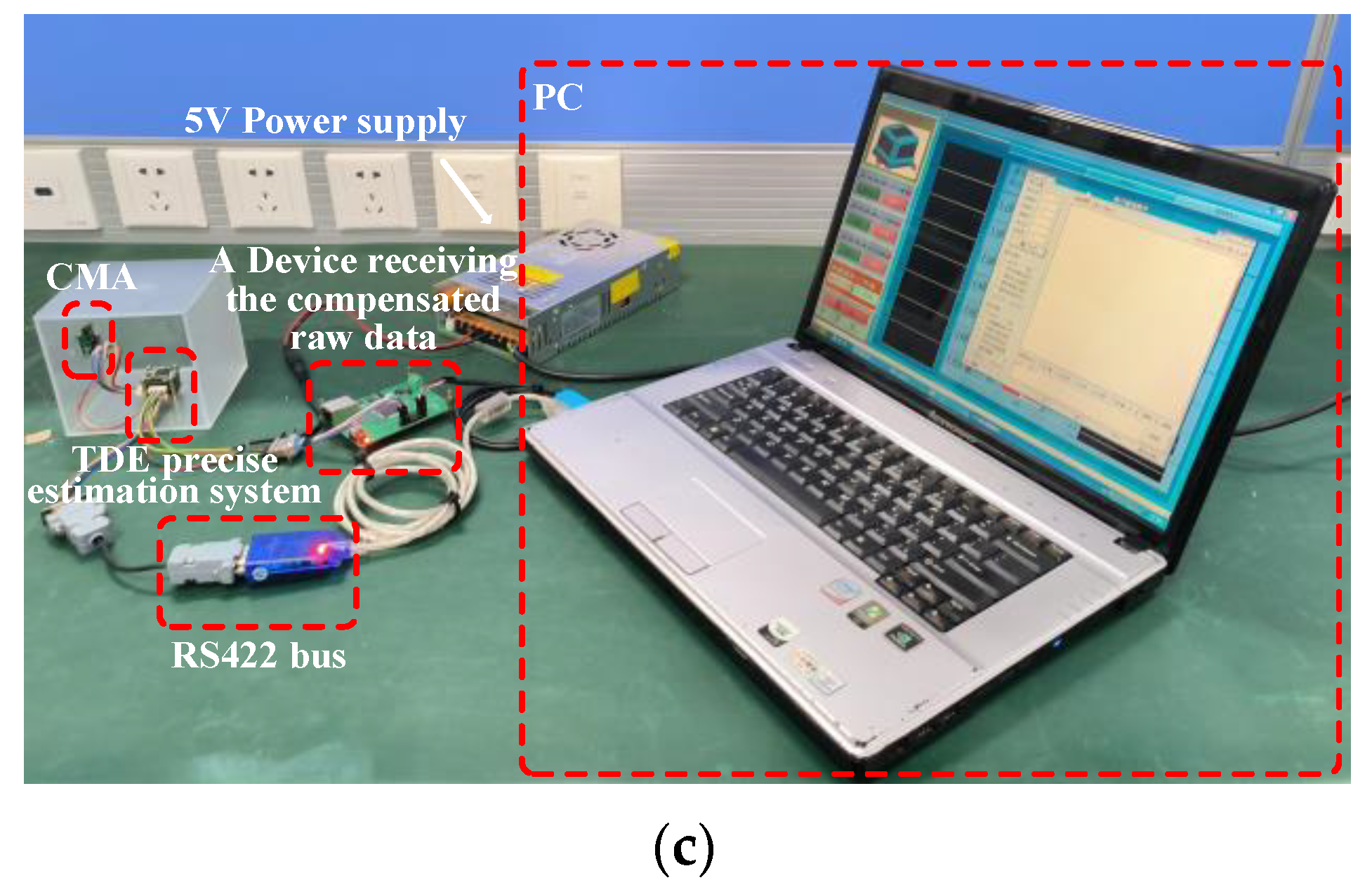
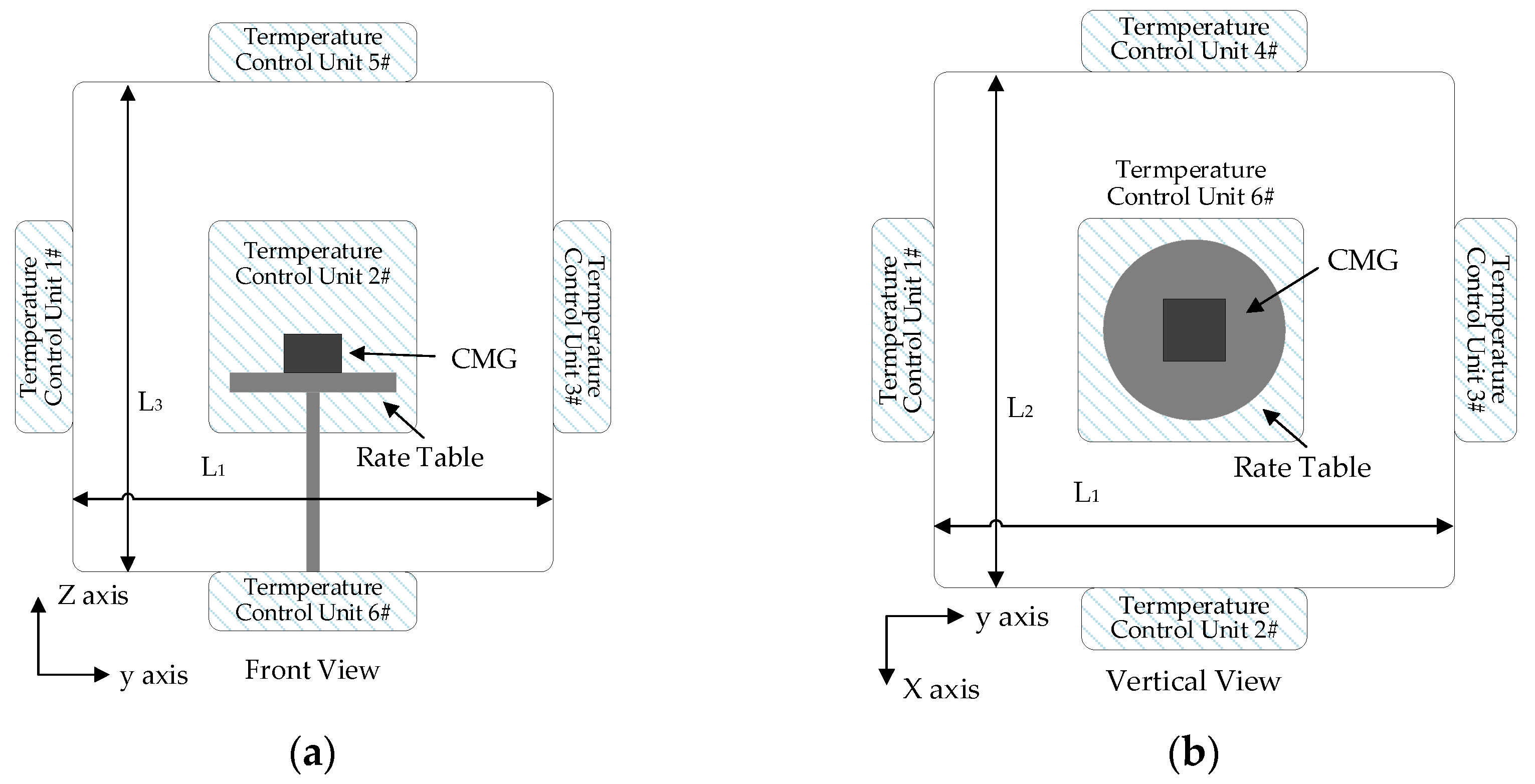
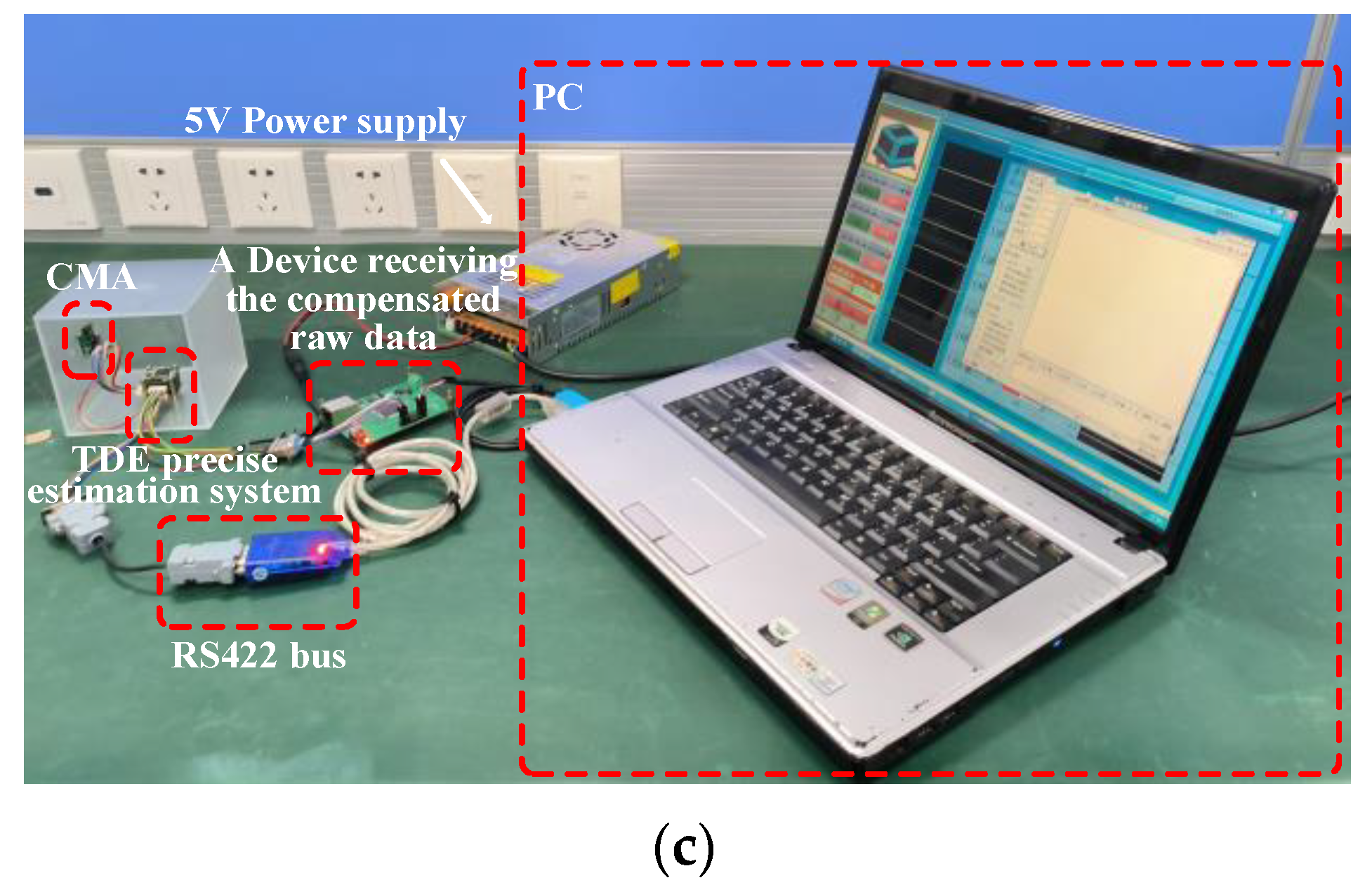
- CMG L3GD20H is installed on the rate table, its measuring direction is parallel to the rate table, and the referenced true value is the angular velocity of the rate table.
- Temperature sensors of the precise temperature measurement system are attached close to L3GD20H, the wireless data transmission module transmits the experimental results, and the PC is prepared to receive its temperature TG and its output DG.
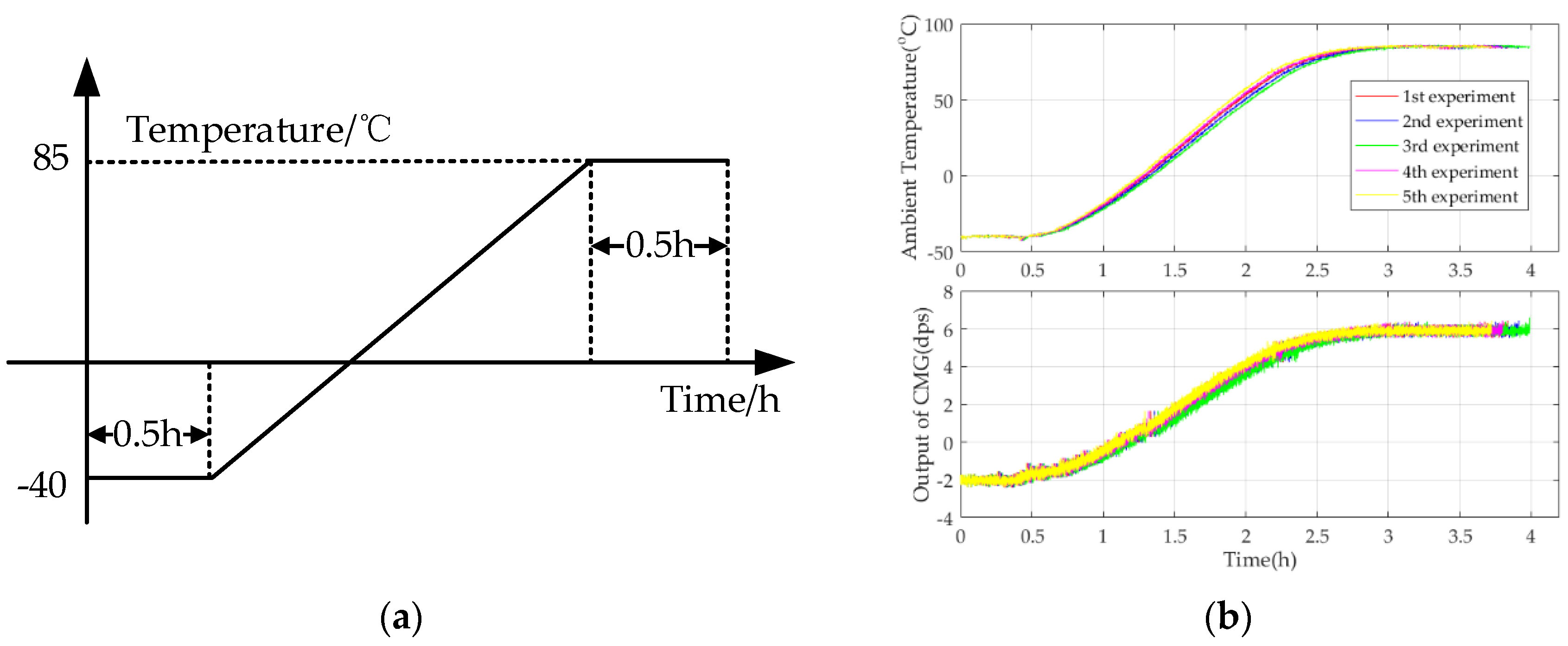
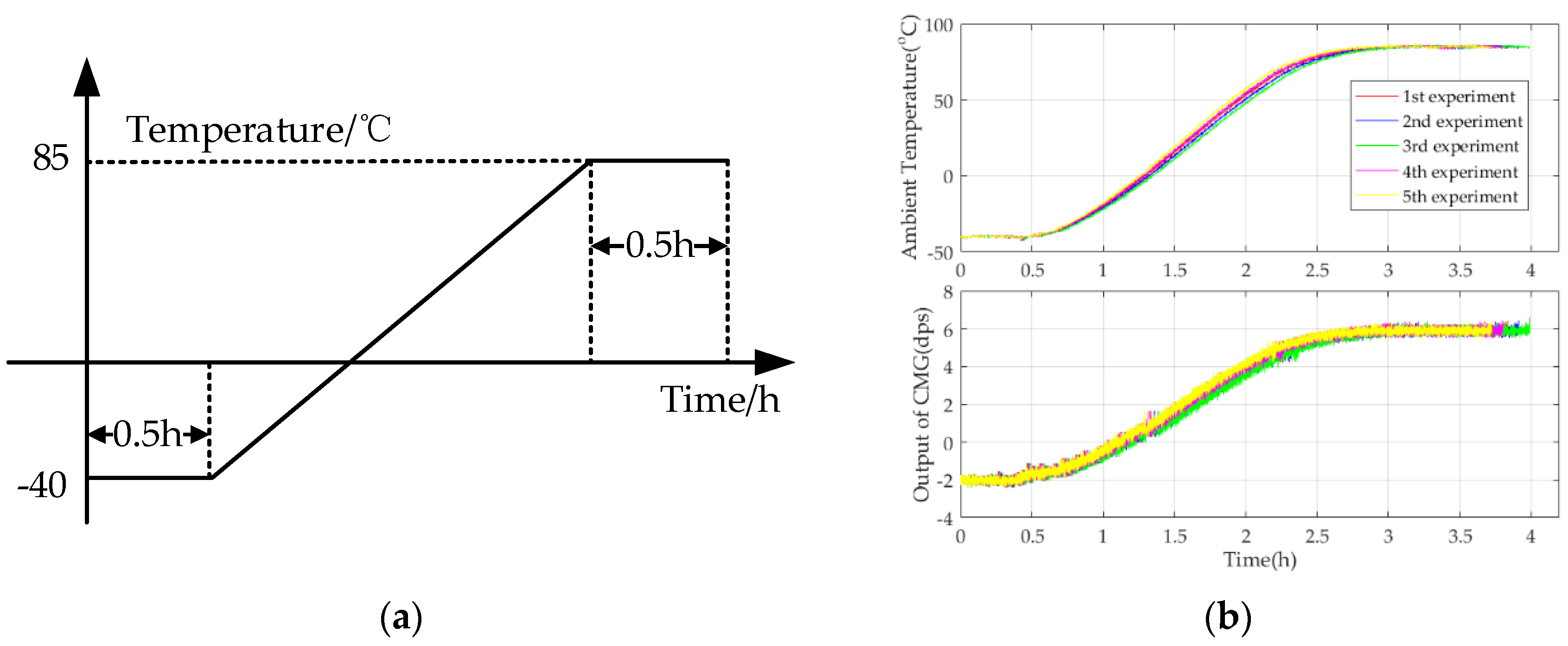
- Cool the thermal chamber to a minimum operating temperature of −40 °C and keep TG and DG recording for 0.5 h when the ambient temperature stays stable.
- Heat the thermal chamber to a maximum operating temperature of 85 °C at a rate of 60 °C/h, 0.5 °C per 30 s. When TG goes up to 85 °C, stop the test when it stays stable for 0.5 h.
- Redo steps (2) to (4) five times and record them as the experimental results.
2.2.2. Implementation of Novel TDE Precise Estimation Model Based on an RBFNN
- Owing to RBFNN’s mathematical principles, its calculation results are optimal in global scope to avoid local minimums, even in flat areas where the error gradient approximates to zero.
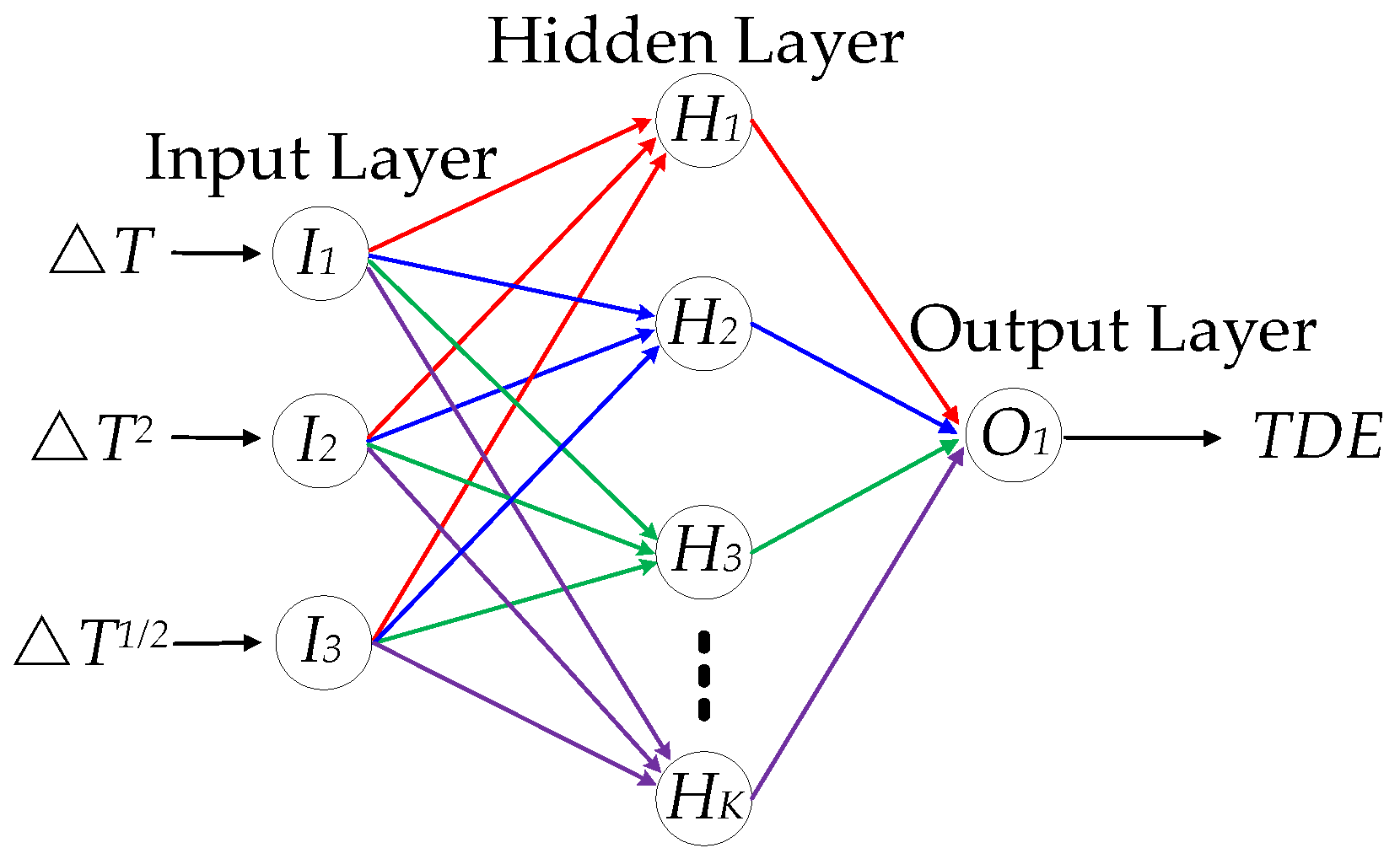
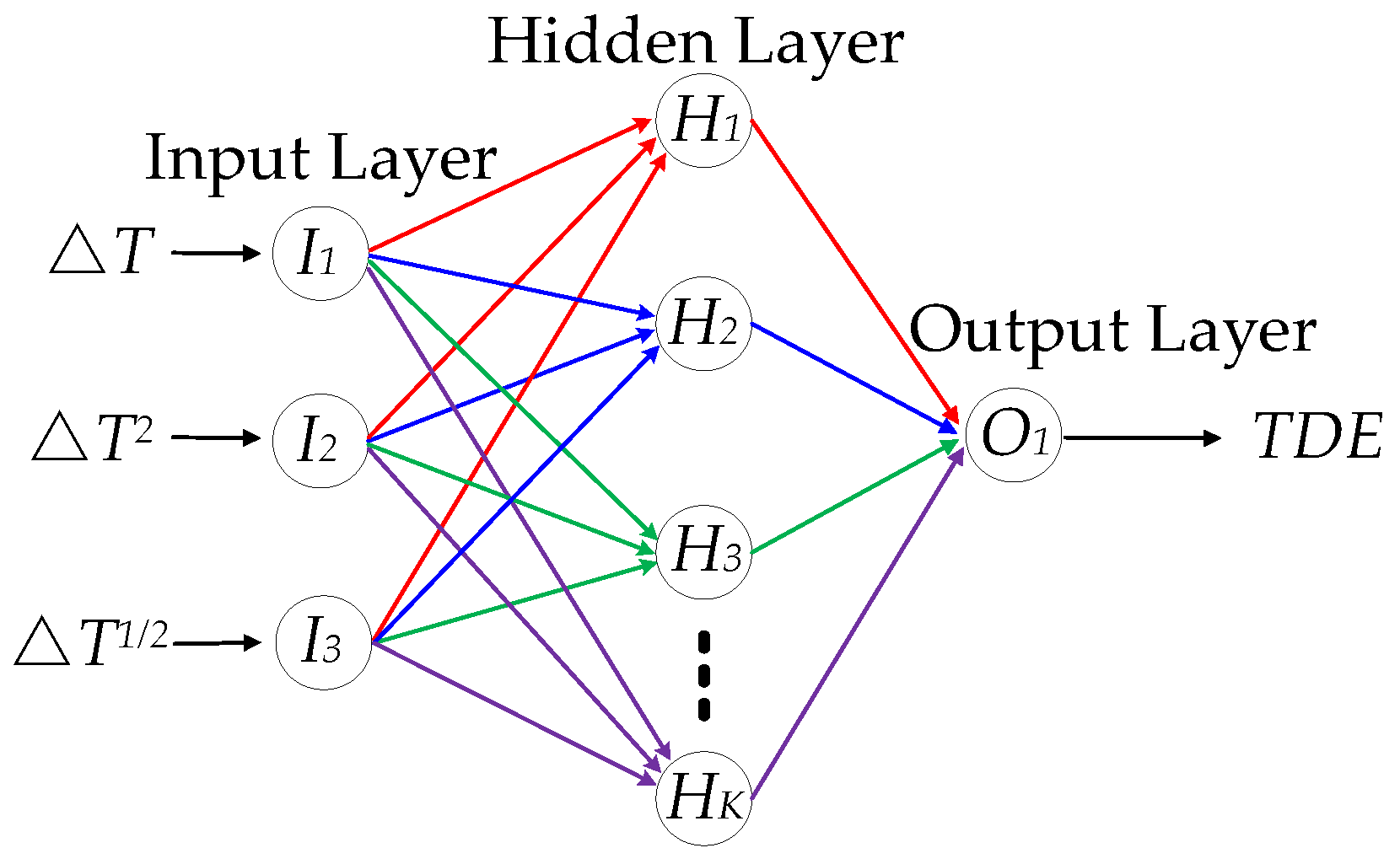
- From the Kolmogorov theorem, a three-layer forward network is able to approach any continuous function with any target accuracy [18]. The RBFNN has the structure of an input layer, a hidden layer, and an output layer, and it can represent the targeted nonlinearity with any accuracy.
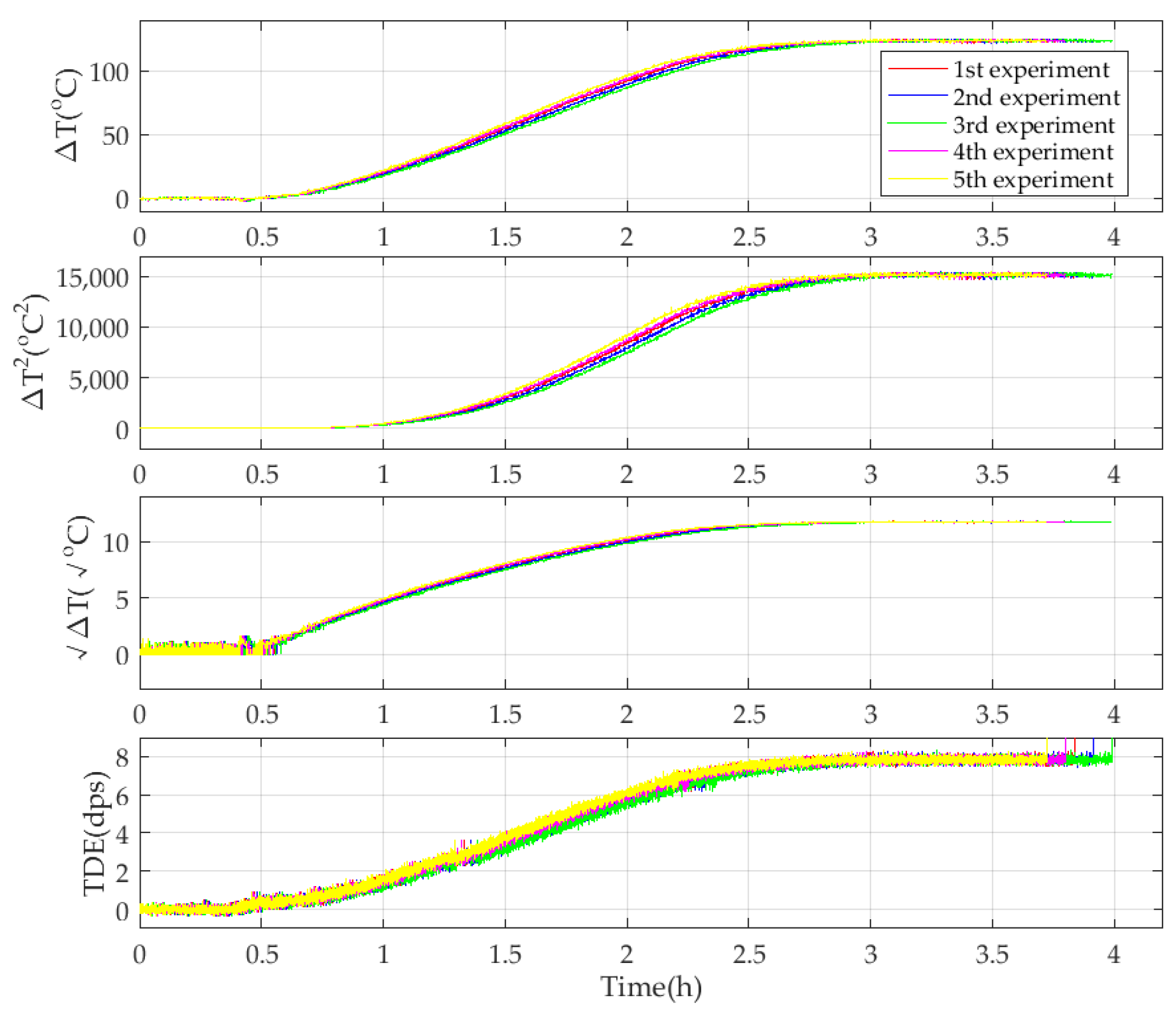
- Two temperature experiments are conducted, and the experimental results are recorded. One of them is a training sample set, and the other one is a verification sample set.
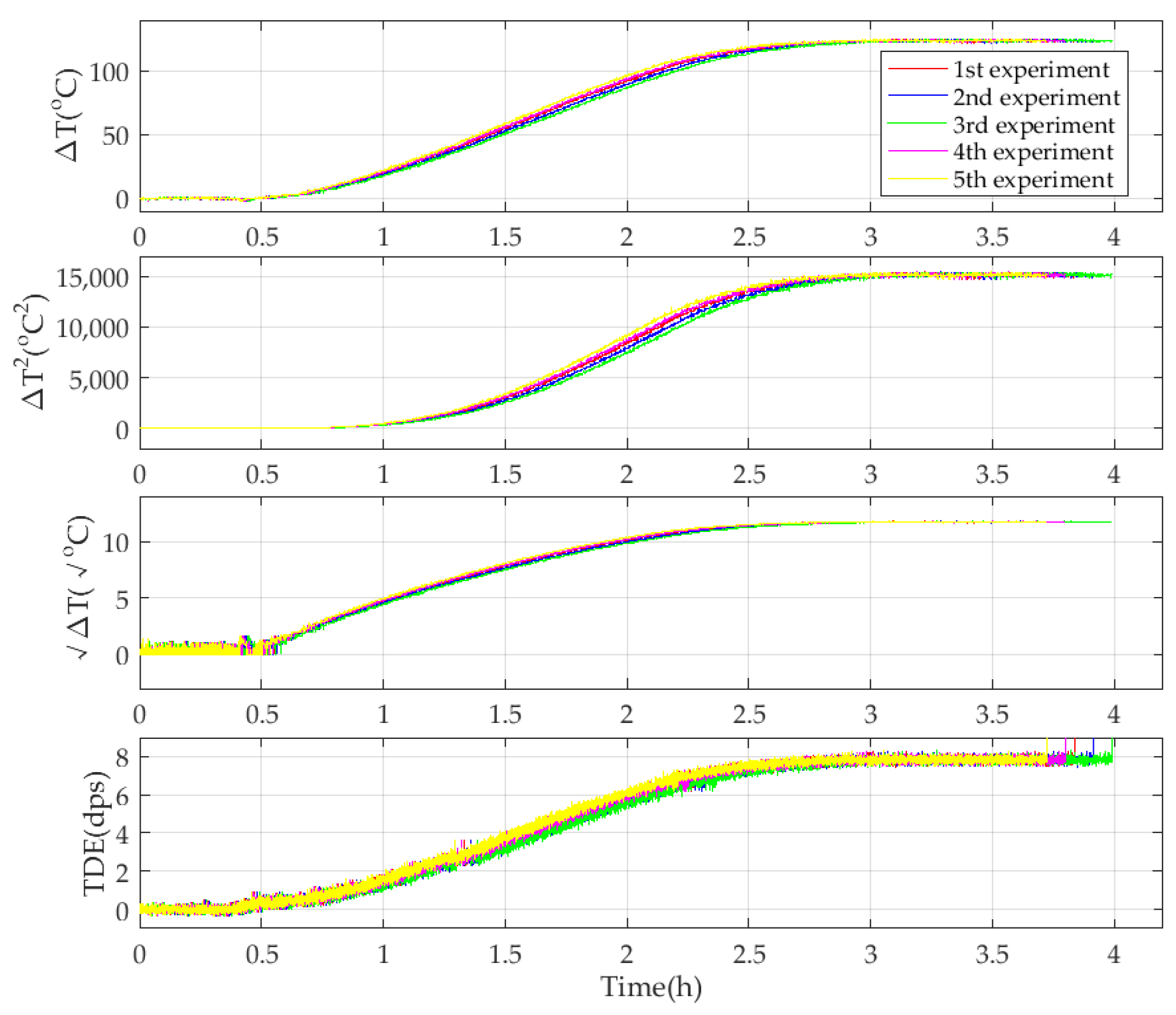
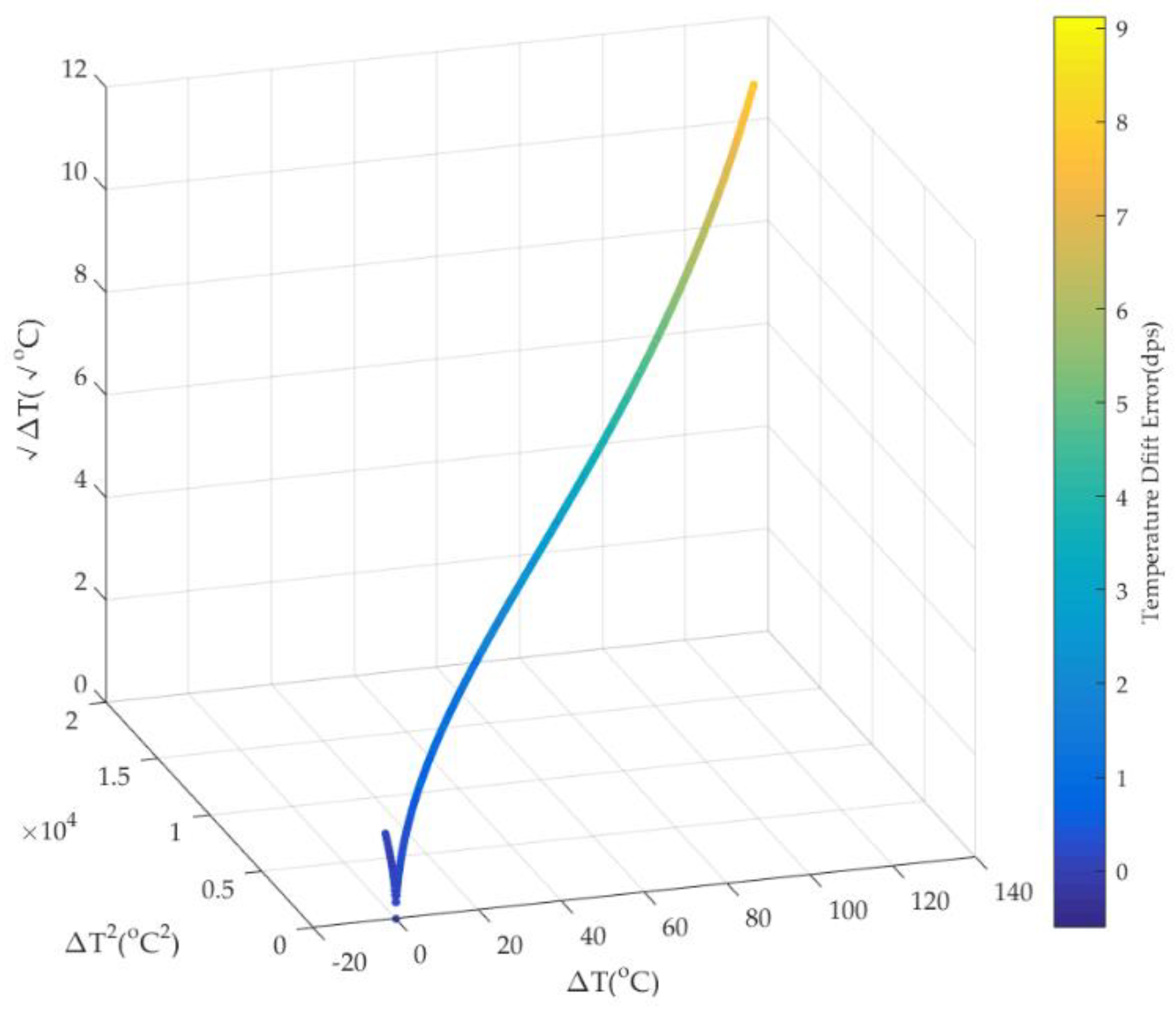
- Based on sample data of the training sample set, TDE is calculated by subtracting the reference value of CMGs from the sample data of their actual outputs one by one. ∆T is calculated by subtracting the reference temperature of CMGs from the sample data of their actual temperature one by one. Then, ∆T2 is obtained by multiplying itself, and ∆T1/2 is obtained by calculating the square root of ∆T.
- The RBFNN uses ∆T, ∆T2, and ∆T1/2 as its inputs and TDE as its output. It is trained with mathematical tools until the differences between its outputs and targeted TDE meet the requirements.
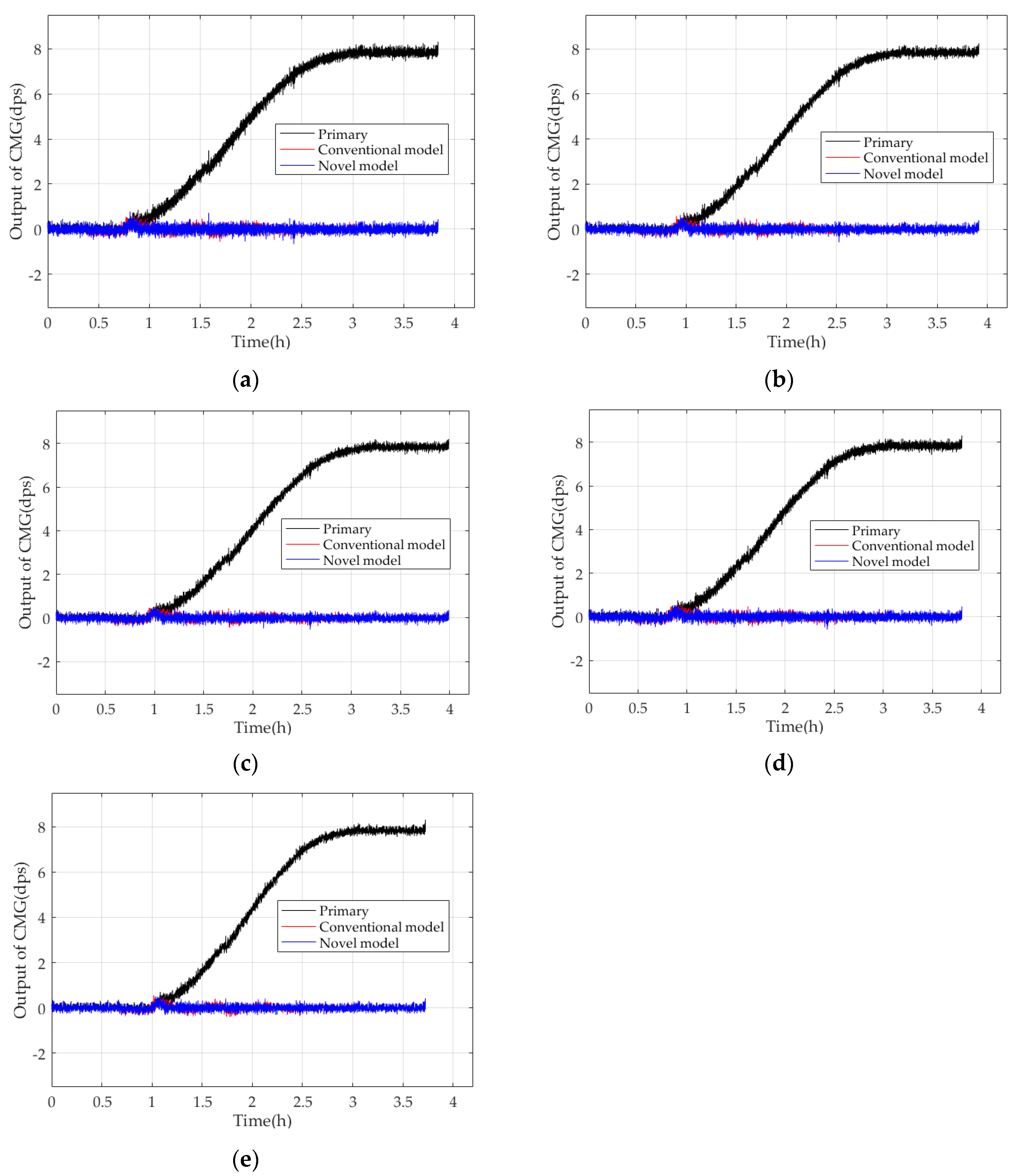
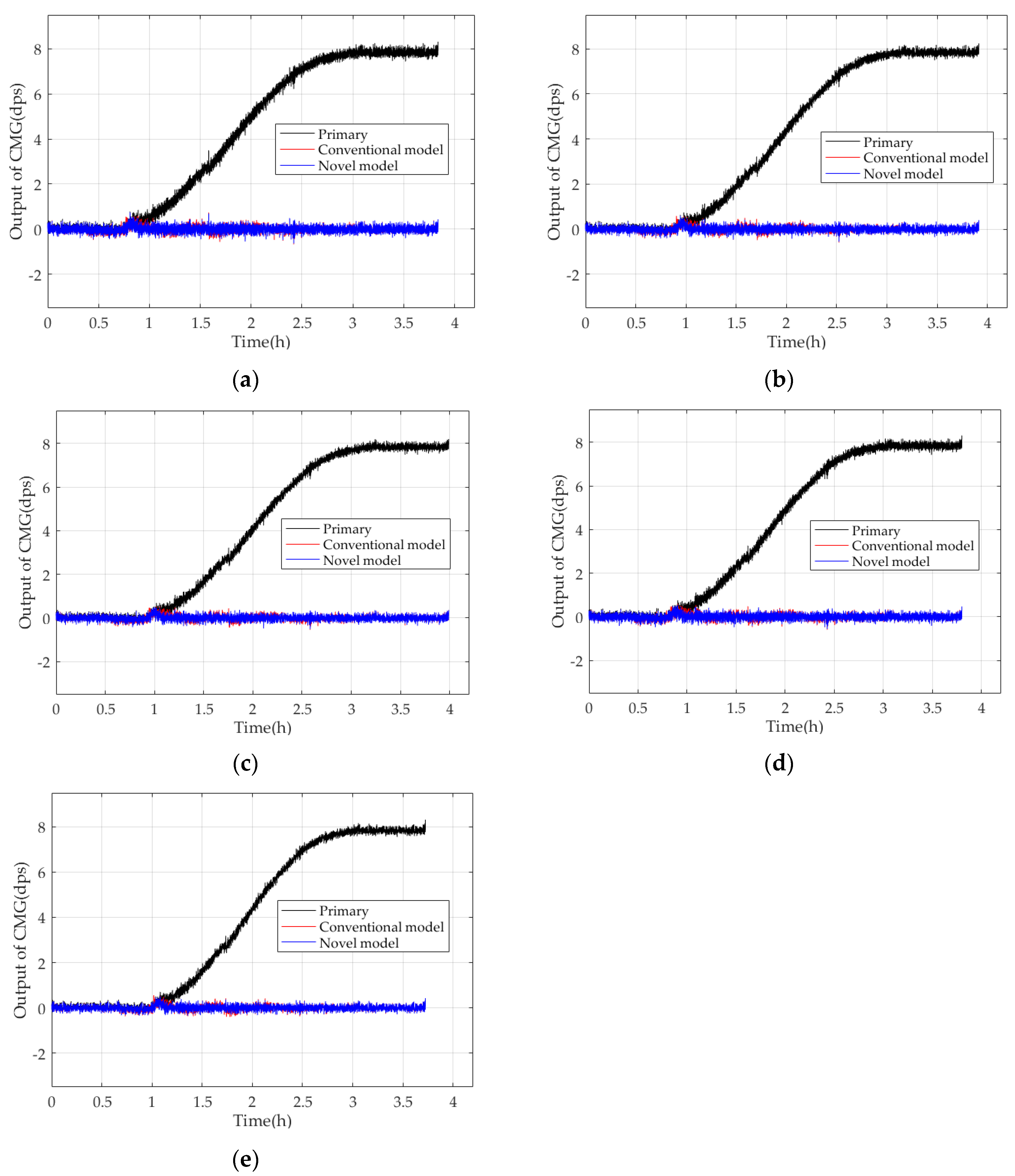
- The compensated results of CMGs are calculated from subtraction between the actual outputs of CMGs and their corresponding estimated outputs of RBFNNs.
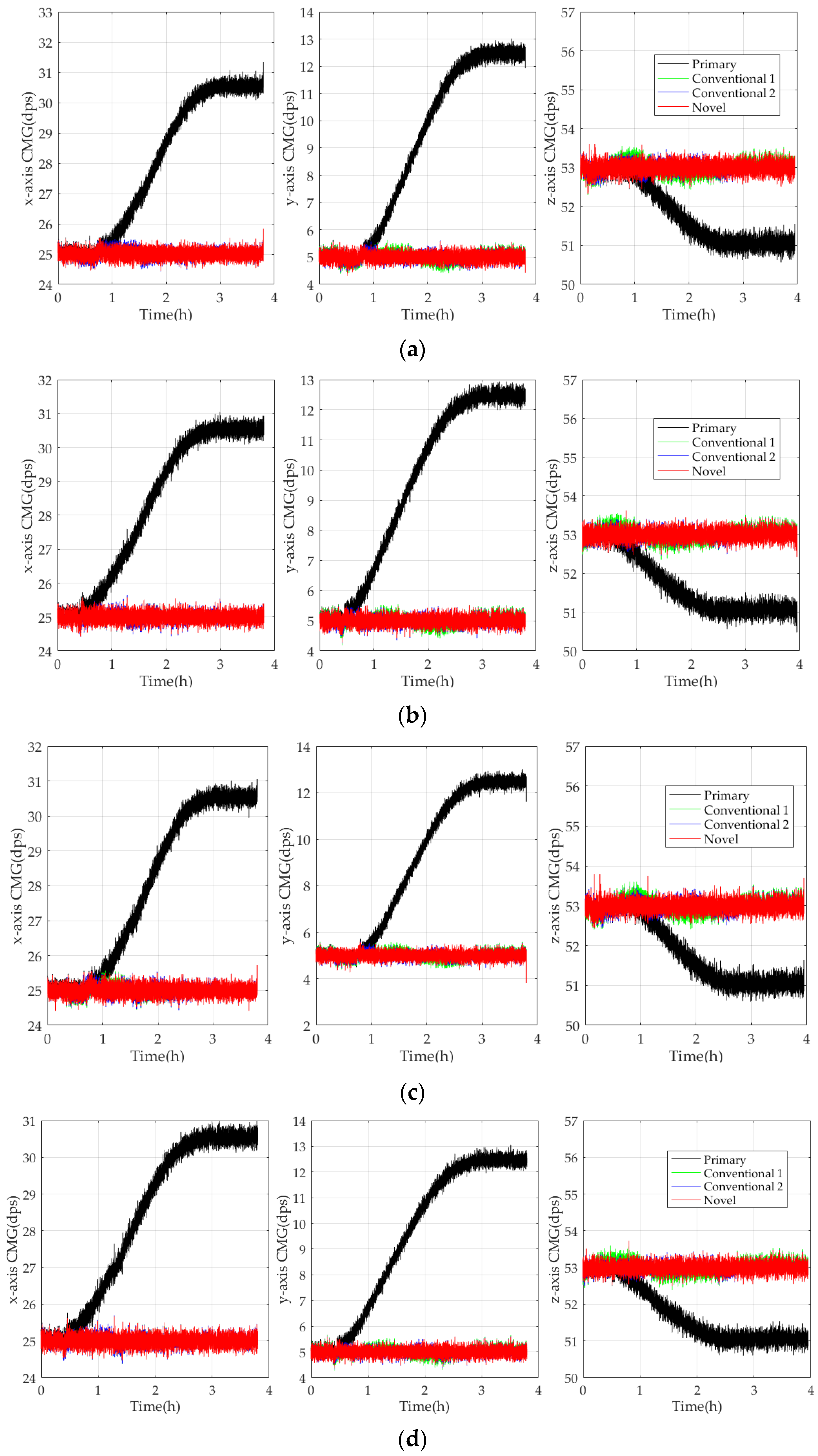
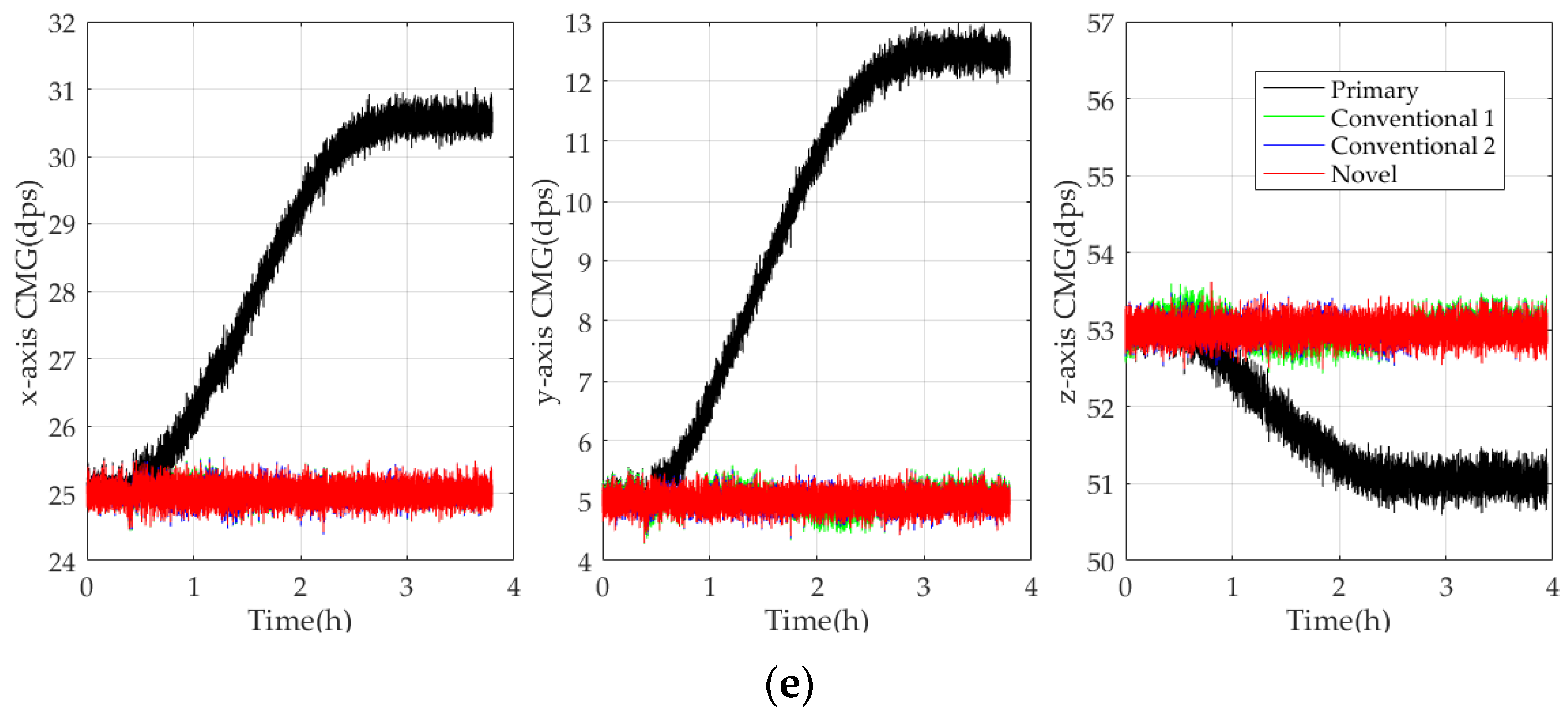
3. Experiments and Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Verma, P.; Agrawal, P.; Gopal, R.; Arya, S.K. Parametric Sensitivity Analysis of a 2-DOF Drive and 1-DOF Sense Modes MEMS Gyro-Accelerometer Structure. Adv. Sci. Lett. 2015, 20, 1495–1498. [Google Scholar] [CrossRef]
- Shen, X.; Yuan, D.; Chang, R.; Jin, W. A Nonlinear Observer for Attitude Estimation of Vehicle-Mounted Satcom-on-the-Move. IEEE Sens. J. 2019, 19, 8057–8066. [Google Scholar] [CrossRef]
- Cai, Q.; Zhao, F.J.; Kang, Q.; Luo, Z.Q.; Hu, D.; Liu, J.W.; Cao, H.L. A Novel Parallel Processing Model for Noise Reduction and Temperature Compensation of MEMS Gyroscope. Micromachines 2021, 12, 1285. [Google Scholar] [CrossRef]
- Yu, Y.Y.; Luo, H.; Chen, B.Y.; Tao, J.; Feng, Z.H.; Zhang, H.; Guo, W.L.; Zhang, D.H. MEMS Gyroscopes Based on Acoustic Sagnac Effect. Micromachines 2017, 8, 2. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Y.; Liu, Y.H.; Zhao, X.D. Temperature Compensation of MEMS Gyroscope Based on Support Vector Machine Optimized by GA. In Proceedings of the 2019 IEEE Symposium Series on Computational Intelligence, Xiamen, China, 6–9 December 2019. [Google Scholar]
- Omar, A.; Elshennawy, A.; AbdelAzim, M.; Ismail, A.H. Analyzing the Impact of Phase Errors in Quadrature Cancellation Techniques for MEMS Capacitive Gyroscopes. In Proceedings of the 2018 17th IEEE SENSORS Conference, New Delhi, India, 28–31 October 2018. [Google Scholar]
- Guan, R.; He, C.H.; Liu, D.; Zhao, Q.; Yang, Z.; Yan, G. A temperature control system used for improving resonant frequency drift of MEMS gyroscopes. In Proceedings of the 10th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Xi’an, China, 7–11 April 2015. [Google Scholar]
- Maspero, F.; Delachanal, S.; Berthelot, A.; Joet, L.; Langfelder, G.; Hentz, S. Quarter-mm2 High Dynamic Range Silicon Capacitive Accelerometer With a 3D Process. IEEE Sens. J. 2020, 20, 689–699. [Google Scholar] [CrossRef]
- Wang, X.; Bleiker, S.J.; Edinger, P.; Errando-Herranz, C.; Roxhed, N.; Stemme, G.; Gylfason, K.B.; Niklaus, F. Wafer-Level Vacuum Sealing by Transfer Bonding of Silicon Caps for Small Footprint and Ultra-Thin MEMS Packages. J. Microelectromechanical Syst. 2019, 28, 460–471. [Google Scholar] [CrossRef]
- Castellanos-Sahagun, E.; Alvarez, J. Temperature-Temperature cascade control of Binary Batch Distillation Columns. In Proceedings of the 2013 European Control Conference, ETH Zurich, Zurich, Switzerland, 17–19 July 2013. [Google Scholar]
- Wang, G.L.; Yan, W.W.; Chen, S.H.; Zhang, X.; Shao, H.H. Multivariable constrained predictive control of main steam temperature in ultra-supercritical coal-fired power unit. J. Energy Inst. 2015, 88, 181–187. [Google Scholar] [CrossRef]
- Xu, S.; Hashimoto, S.; Jiang, W.; Jiang, Y.Q.; Izaki, K.; Kihara, T.; Ikeda, R. Slow Mode-Based Control Method for Multi-Point Temperature Control System. Processes 2019, 7, 533. [Google Scholar] [CrossRef]
- Wu, X.Y.; Wang, X.N.; He, G.G. A Fuzzy Self-tuning Temperature PID Control Algorithms for 3D Bio-printing Temperature Control System. In Proceedings of the 2020 32nd Chinese Control And Decision Conference, Hefei, China, 22–24 August 2020. [Google Scholar]
- Dong, H.; Zhang, W.; Li, M.X.; Zeng, Z.B.; Cao, D.; Li, X.P. High-precision air temperature control considering both hardware elements and controller design. Case Stud. Therm. Eng. 2022, 37, 102290. [Google Scholar] [CrossRef]
- Krysko, V.A.; Awrejcewicz, J.; Yakovleva, T.V.; Kirichenko, A.V.; Szymanowska, O.; Krysko, V.A. Mathematical modeling of MEMS elements subjected to external forces, temperature and noise, taking account of coupling of temperature and deformation fields as well as a nonhomogenous material structure. Commun. Nonlinear Sci. Numer. Simul. 2019, 72, 39–58. [Google Scholar] [CrossRef]
- Maj, C.; Szermer, M.; Zajac, P.; Amrozik, P. Analytical modelling of MEMS Z-axis comb-drive accelerometer. In Proceedings of the 2019 20th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE), Hannover, Germany, 24–27 March 2019. [Google Scholar]
- Kim, B.; Hopcroft, M.A.; Candler, R.N.; Jha, C.M.; Agarwal, M.; Melamud, R.; Chandorkar, S.A.; Yama, G.; Kenny, T.W. Temperature Dependence of Quality Factor in MEMS Resonators. J. Microelectromechanical Syst. 2008, 17, 755–766. [Google Scholar] [CrossRef]
- Qi, B.; Wen, F.Z.; Liu, F.M.; Cheng, J.H. Modification of MTEA-Based Temperature Drift Error Compensation Model for MEMS-Gyros. Sensors 2020, 20, 2906. [Google Scholar] [CrossRef] [PubMed]
- Bekkeng, J.K. Calibration of a Novel MEMS Inertial Reference Unit. IEEE Trans. Instrum. Meas. 2009, 58, 1967–1974. [Google Scholar] [CrossRef]
- Qi, B.; Chen, J.Y.; Tian, S.S. A Novel Temperature Drift Error Precise Estimation Model of MEMS Capacitive Accelerometers Using MTAM. In Proceedings of the 2022 International Conference on Guidance, Navigation and Control, ICGNC 2022: Advances in Guidance, Navigation and Control, Harbin, China, 5–7 August 2022. [Google Scholar] [CrossRef]
- Qi, B.; Shi, S.S.; Zhao, L.; Cheng, J.H. A Novel Temperature Drift Error Precise Estimation Model for MEMS Accelerometers Using Microstructure Thermal Analysis. Micromachines 2022, 13, 835. [Google Scholar] [CrossRef] [PubMed]
- Dai, G.; Li, M.; He, X.; Du, L.; Shao, B.; Su, W. Thermal drift analysis using a multiphysics model of bulk silicon MEMS capacitive accelerometer. Sens. Actuators A-Phys. 2011, 172, 369–378. [Google Scholar] [CrossRef]
- Kinoshita, T.; Kawakami, T.; Hori, T.; Matsumoto, K.; Kohara, S.; Orii, Y.; Yamada, F.; Kada, M. Thermal Stresses of Through Silicon Vias and Si Chips in Three Dimensional System in Package. J. Electron. Packag. 2013, 134, 020903. [Google Scholar] [CrossRef]
- Hong, C.C. Thermal bending analysis of shear-deformable laminated anisotropic plates by the GDQ method. Mech. Res. Commun. 2009, 36, 804–810. [Google Scholar] [CrossRef]
- Ab Rahim, R.; Bais, B.; Majlis, B.Y.; Fareed, S. Design Optimization of MEMS Dual-Leg Shaped Piezoresistive Microcantilever. In Proceedings of the 2013 IEEE Regional Symposium on Micro and Nanoelectronics, Daerah Langkawi, Malaysia, 25–27 September 2013. [Google Scholar]
- Basarab, M.; Giani, A.; Combette, P. Thermal Accelerometer Simulation by the R-Functions Method. Appl. Sci. 2020, 10, 8373. [Google Scholar] [CrossRef]
- Cheng, J.; Fang, J.; Wu, W.; Li, J. Temperature drift modeling and compensation of RLG based on PSO tuning SVM. Measurement 2014, 55, 246–254. [Google Scholar] [CrossRef]
- Pan, Y.J.; Li, L.L.; Ren, C.H.; Luo, H.L. Study on the compensation for a quartz accelerometer based on a wavelet neural network. Meas. Sci. Technol. 2010, 21, 105202. [Google Scholar] [CrossRef]
- Xu, D.; Yang, Z.; Zhao, H.; Zhou, X. A temperature compensation method for MEMS accelerometer based on LM-BP neural network. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016. [Google Scholar]
- Wang, C.C.; Lin, C.J. Dynamic Analysis and Machine Learning Prediction of a Nonuniform Slot Air Bearing System. ASME J. Comput. Nonlinear Dyn. 2023, 18, 011007. [Google Scholar] [CrossRef]
- Wang, S.; Zhu, W.; Shen, Y.; Ren, J.; Gu, H.; Wei, X. Temperature compensation for MEMS resonant accelerometer based on genetic algorithm optimized backpropagation neural network. Sens. Actuators A-Phys. 2020, 316, 112393. [Google Scholar] [CrossRef]
- Wang, C.C.; Kuo, P.H.; Chen, G.Y. Machine Learning Prediction of Turning Precision Using Optimized XGBoost Model. Appl. Sci. 2022, 12, 7739. [Google Scholar] [CrossRef]
- Kou, Z.W.; Kong, Z.; Jing, G.L.; Cui, X.M.; Ge, L.; Lu, P.Z. Design of Capacitive MEMS Ring Solid-state Vibrating Gyroscope Interface Circuit. In Proceedings of the 2022 IEEE 6th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Beijing, China, 3–5 October 2022. [Google Scholar]
- Oouchi, A. Plastic molded package technology for MEMS sensor evolution of MEMS sensor package. In Proceedings of the 2014 International Conference on Electronics Packaging (ICEP), Toyama, Japan, 23–25 April 2014. [Google Scholar]
- Datskos, P.G.; Rajic, S.; Datskou, I. Photoinduced and Thermal Stress in Silicon Microcantilevers. Appl. Phys. Lett. 1998, 73, 2319–2321. [Google Scholar] [CrossRef]
- Lu, K.H.; Ryu, S.K.; Zhao, Q.; Hummler, K.; Im, J.; Huang, R.; Ho, P.S. Temperature-dependent Thermal Stress Determination for Through-Silicon-Vias (TSVs) by Combining Bending Beam Technique with Finite Element Analysis. In Proceedings of the 2011 IEEE 61st Electronic Components and Technology Conference, Lake Buena Vista, FL, USA, 31 May–3 June 2011. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MSD1 | MSD2 | MSD3 | Q1 | Q2 | |Q2 − Q1|/Q1 (%) | |
|---|---|---|---|---|---|---|
| First experiment | 9.5552 | 3.5555 × 10−2 | 3.2172 × 10−2 | 3.7210 × 10−3 | 3.3670 × 10−3 | 9.51% |
| Second experiment | 9.5579 | 3.5957 × 10−2 | 3.1756 × 10−2 | 3.7620 × 10−3 | 3.3224 × 10−3 | 11.68% |
| Third experiment | 9.5567 | 3.4492 × 10−2 | 3.1616 × 10−2 | 3.6092 × 10−3 | 3.3083 × 10−3 | 8.34% |
| Fourth experiment | 9.5590 | 3.5734 × 10−2 | 3.1339 × 10−2 | 3.7383 × 10−3 | 3.2784 × 10−3 | 12.30% |
| Fifth experiment | 9.5507 | 3.5442 × 10−2 | 3.1660 × 10−2 | 3.7109 × 10−3 | 3.3150 × 10−3 | 10.67% |
| MSD1 | MSD4 | MSD5 | MSD6 | Q3 | Q4 | Q5 | |Q4 − Q3|/Q3 (%) | |Q5 − Q3|/Q3 (%) | |Q5 − Q4|/Q4 (%) | |
|---|---|---|---|---|---|---|---|---|---|---|
| x-axis | 4.7794 | 0.0216 | 0.0214 | 0.0193 | 4.519 × 10−3 | 4.478 × 10−3 | 4.038 × 10−3 | 0.93% | 10.65% | 9.81% |
| y-axis | 8.5768 | 0.0280 | 0.0233 | 0.0214 | 3.265 × 10−3 | 2.717 × 10−3 | 2.495 × 10−3 | 16.79% | 23.57% | 8.15% |
| z-axis | 0.7258 | 0.0270 | 0.0220 | 0.0210 | 3.720 × 10−2 | 3.031 × 10−2 | 2.893 × 10−2 | 18.52% | 22.22% | 4.55% |
| MSD1 | MSD4 | MSD5 | MSD6 | Q3 | Q4 | Q5 | |Q4 − Q3|/Q3 (%) | |Q5 − Q3|/Q3 (%) | |Q5 − Q4|/Q4 (%) | |
|---|---|---|---|---|---|---|---|---|---|---|
| x-axis | 3.8545 | 0.0194 | 0.0192 | 0.0184 | 5.033 × 10−3 | 4.981 × 10−3 | 4.774 × 10−3 | 1.03% | 5.15% | 4.17% |
| y-axis | 6.8265 | 0.0256 | 0.0219 | 0.0208 | 3.750 × 10−3 | 3.208 × 10−3 | 3.047 × 10−3 | 14.53% | 18.75% | 5.02% |
| z-axis | 0.6582 | 0.0271 | 0.0211 | 0.0202 | 4.117 × 10−2 | 3.206 × 10−2 | 3.069 × 10−2 | 22.14% | 25.46% | 4.27% |
| MSD1 | MSD4 | MSD5 | MSD6 | Q3 | Q4 | Q5 | |Q4 − Q3|/Q3 (%) | |Q5 − Q3|/Q3 (%) | |Q5 − Q4|/Q4 (%) | |
|---|---|---|---|---|---|---|---|---|---|---|
| x-axis | 4.7779 | 0.0210 | 0.0202 | 0.0190 | 4.395 × 10−3 | 4.227 × 10−3 | 3.976 × 10−3 | 3.81% | 9.52% | 5.94% |
| y-axis | 8.5962 | 0.0289 | 0.0240 | 0.0221 | 3.362 × 10−3 | 2.792 × 10−3 | 2.571 × 10−3 | 16.96% | 23.53% | 7.92% |
| z-axis | 0.7286 | 0.0280 | 0.0227 | 0.0214 | 3.843 × 10−2 | 3.116 × 10−2 | 2.937 × 10−2 | 24.91% | 26.35% | 1.92% |
| MSD1 | MSD4 | MSD5 | MSD6 | Q3 | Q4 | Q5 | |Q4 − Q3|/Q3 (%) | |Q5 − Q3|/Q3 (%) | |Q5 − Q4|/Q4 (%) | |
|---|---|---|---|---|---|---|---|---|---|---|
| x-axis | 3.8575 | 0.0200 | 0.0199 | 0.0189 | 5.185 × 10−3 | 5.159 × 10−3 | 4.900 × 10−3 | 0.51% | 5.50% | 5.03% |
| y-axis | 6.8208 | 0.0256 | 0.0221 | 0.0211 | 3.753 × 10−3 | 3.240 × 10−3 | 3.094 × 10−3 | 13.67% | 17.58% | 4.52% |
| z-axis | 0.6538 | 0.0273 | 0.0207 | 0.0200 | 4.176 × 10−2 | 3.166 × 10−2 | 3.059 × 10−2 | 24.18% | 26.74% | 3.38% |
| MSD1 | MSD4 | MSD5 | MSD6 | Q3 | Q4 | Q5 | |Q4 − Q3|/Q3 (%) | |Q5 − Q3|/Q3 (%) | |Q5 − Q4|/Q4 (%) | |
|---|---|---|---|---|---|---|---|---|---|---|
| x-axis | 3.8538 | 0.0198 | 0.0193 | 0.0189 | 5.138 × 10−3 | 5.008 × 10−3 | 4.904 × 10−3 | 2.53% | 4.55% | 2.07% |
| y-axis | 6.8339 | 0.0256 | 0.0217 | 0.0212 | 3.746 × 10−3 | 3.175 × 10−3 | 3.102 × 10−3 | 15.23% | 17.19% | 2.30% |
| z-axis | 0.6588 | 0.0274 | 0.0209 | 0.0203 | 4.159 × 10−2 | 3.172 × 10−2 | 3.081 × 10−2 | 23.72% | 25.91% | 2.87% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, B.; Cheng, J.; Wang, Z.; Jiang, C.; Jia, C. A Novel Temperature Drift Error Estimation Model for Capacitive MEMS Gyros Using Thermal Stress Deformation Analysis. Micromachines 2024, 15, 324. https://doi.org/10.3390/mi15030324
Qi B, Cheng J, Wang Z, Jiang C, Jia C. A Novel Temperature Drift Error Estimation Model for Capacitive MEMS Gyros Using Thermal Stress Deformation Analysis. Micromachines. 2024; 15(3):324. https://doi.org/10.3390/mi15030324
Chicago/Turabian StyleQi, Bing, Jianhua Cheng, Zili Wang, Chao Jiang, and Chun Jia. 2024. "A Novel Temperature Drift Error Estimation Model for Capacitive MEMS Gyros Using Thermal Stress Deformation Analysis" Micromachines 15, no. 3: 324. https://doi.org/10.3390/mi15030324
APA StyleQi, B., Cheng, J., Wang, Z., Jiang, C., & Jia, C. (2024). A Novel Temperature Drift Error Estimation Model for Capacitive MEMS Gyros Using Thermal Stress Deformation Analysis. Micromachines, 15(3), 324. https://doi.org/10.3390/mi15030324