
Three-Dimensional Manipulation of Micromodules Using Twin Optothermally Actuated Bubble Robots

Abstract
1. Introduction
2. Materials and Methods
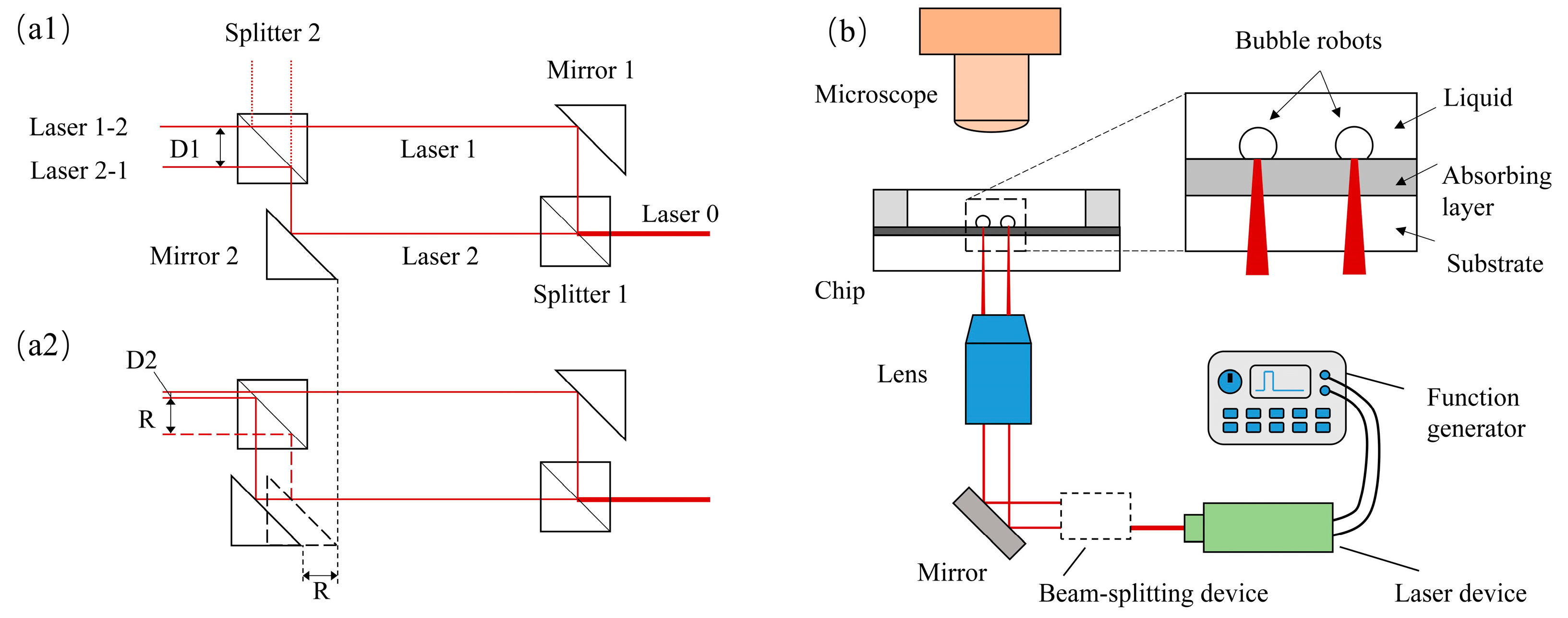
2.1. Beam-Splitting Device and Method
2.2. Experimental Setup
2.3. Fabrication of Micromodules
3. Results
3.1. Generation and Driving of Two Microbubbles
3.1.1. Detection and Analysis of Laser Beams
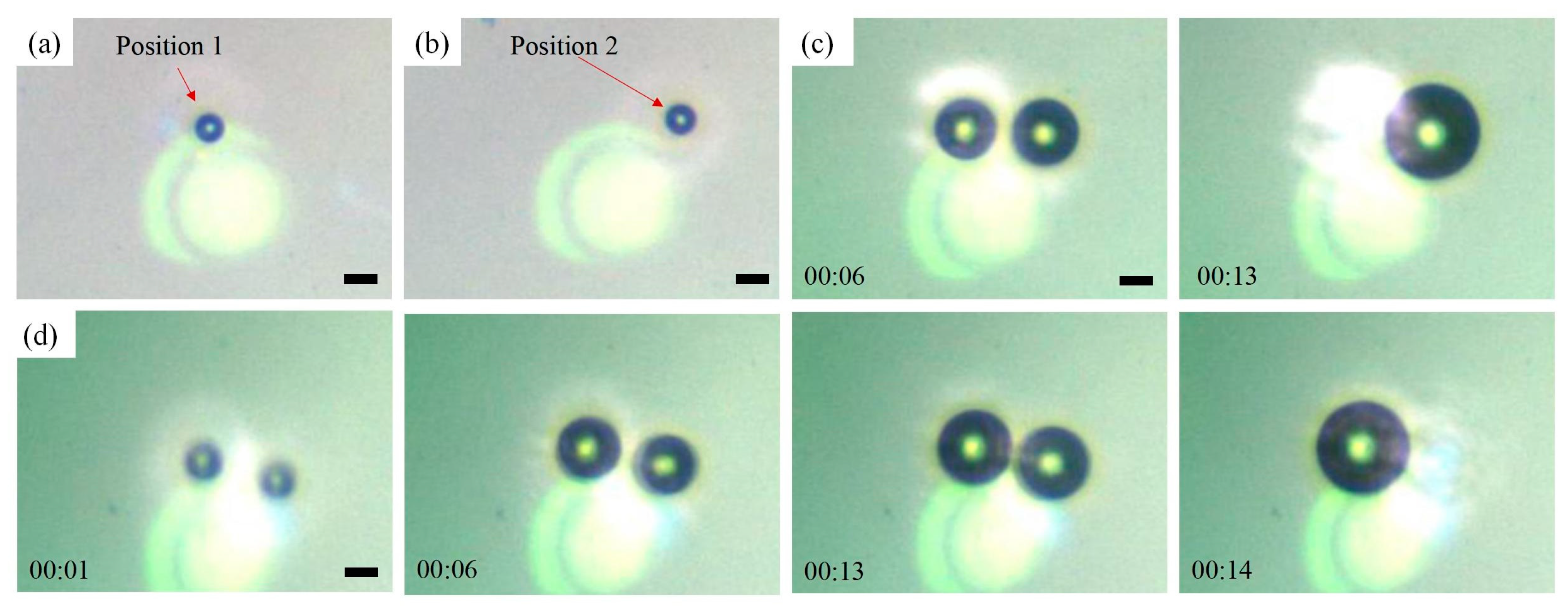
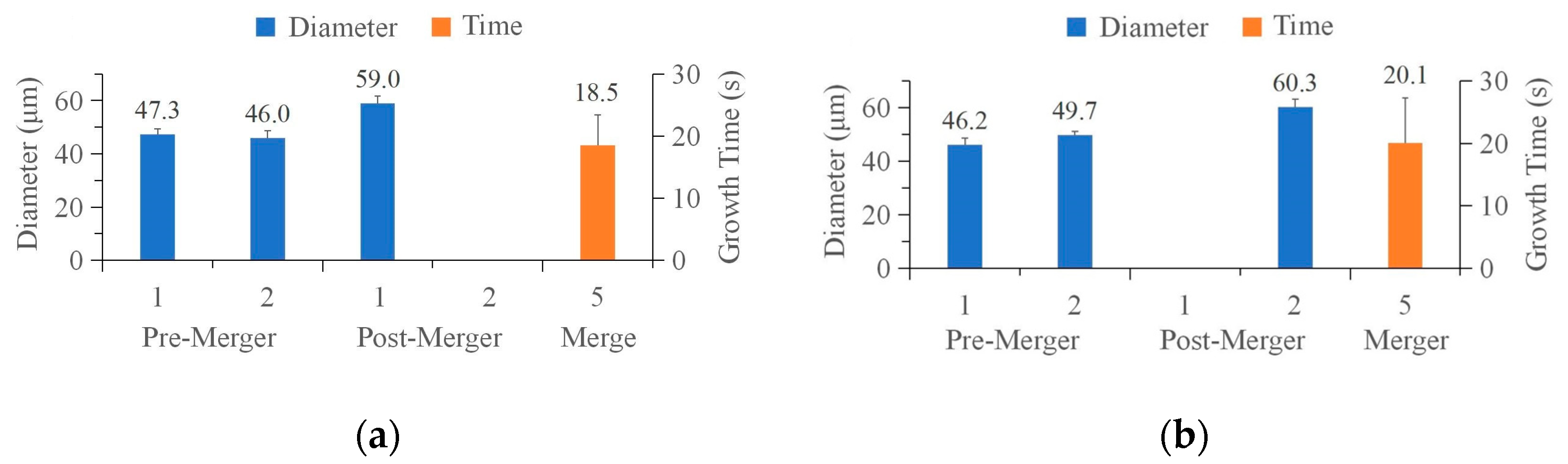
3.1.2. Generation and Driving of Two Microbubbles
3.2. Manipulation by Bubble Robots
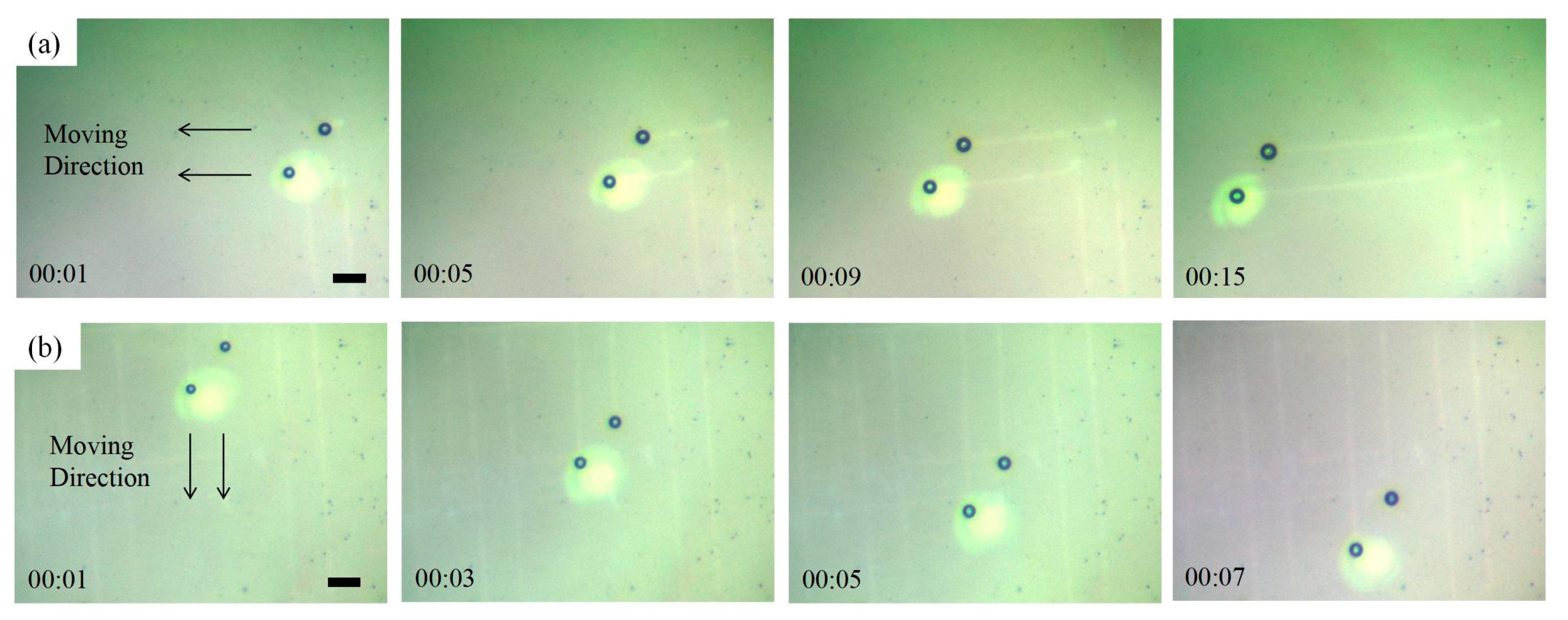
3.2.1. Two-Dimensional Manipulation
3.2.2. Three-Dimensional Manipulation
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Paxton, W.F.; Sen, A.; Mallouk, T.E. Motility of catalytic nanoparticles through self-generated forces. Chem-Eur. J. 2005, 11, 6462–6470. [Google Scholar] [CrossRef] [PubMed]
- Walther, A.; Müller, A.H.E. Janus Particles: Synthesis, Self-Assembly, Physical Properties, and Applications. Chem. Commun. 2013, 113, 5194–5261. [Google Scholar] [CrossRef] [PubMed]
- Walther, A.; Müller, A.H.E. Janus particles. Soft Matter. 2008, 4, 663–668. [Google Scholar] [CrossRef] [PubMed]
- Hong, C.; Ren, Z.; Wang, C.; Li, M.; Wu, Y.; Tang, D.; Hu, W.; Sitti, M. Magnetically actuated gearbox for the wireless control of millimeter-scale robots. Sci. Robot. 2022, 7, eabo4401. [Google Scholar] [CrossRef] [PubMed]
- Goudu, S.R.; Yasa, I.C.; Hu, X.H.; Ceylan, H.; Hu, W.Q.; Sitti, M. Biodegradable Untethered Magnetic Hydrogel Milli-Grippers. Adv. Funct. Mater. 2020, 30, 2004975. [Google Scholar] [CrossRef]
- Jeong, J.; Lee, J.B.; Chung, S.K.; Kim, D. Electromagnetic three dimensional liquid metal manipulation. Lab Chip 2019, 19, 3261–3267. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.W.; Cho, S.K. 3-D swimming microdrone powered by acoustic bubbles. Lab Chip 2021, 21, 355–364. [Google Scholar] [CrossRef]
- Xiao, Y.X.; Zhang, J.H.; Fang, B.; Zhao, X.; Hao, N.J. Acoustics-Actuated Microrobots. Micromachines 2022, 13, 481. [Google Scholar] [CrossRef]
- Ren, L.; Nama, N.; McNeill, J.M.; Soto, F.; Yan, Z.; Liu, W.; Wang, W.; Wang, J.; Mallouk, T.E. 3D steerable, acoustically powered microswimmers for single-particle manipulation. Sci. Adv. 2019, 5, eaax3084. [Google Scholar] [CrossRef]
- Lee, J.H.; Lee, K.H.; Chae, J.B.; Rhee, K.; Chung, S.K. On-chip micromanipulation by AC-EWOD driven twin bubbles. Sensor. Actuat. A-Phys. 2013, 195, 167–174. [Google Scholar] [CrossRef]
- Chung, S.K.; Kwon, J.O.; Cho, S.K. Manipulation of Micro/Mini-objects by AC-Electrowetting-Actuated Oscillating Bubbles: Capturing, Carrying and Releasing. J. Adhes. Sci. Technol. 2012, 26, 1965–1983. [Google Scholar] [CrossRef]
- Chung, S.K.; Rhee, K.; Cho, S.K. Bubble actuation by electrowetting-on-dielectric (EWOD) and its applications: A review. Int. J. Precis. Eng. Manuf. 2010, 11, 991–1006. [Google Scholar] [CrossRef]
- Yang, Y.Y.; Shen, Y.J. Light-Driven Carbon-Based Soft Materials: Principle, Robotization, and Application. Adv. Opt. Mat. 2021, 9, 2100035. [Google Scholar] [CrossRef]
- Yang, W.G.; Wang, X.W.; Wang, Z.; Liang, W.F.; Ge, Z.X. Light-powered microrobots: Recent progress and future challenges. Opt. Laser Eng. 2023, 161, 107380. [Google Scholar] [CrossRef]
- Chiou, P.Y.; Ohta, A.T.; Jamshidi, A.; Hsu, H.Y.; Wu, M.C. Light-actuated ac electroosmosis for nanoparticle manipulation. J. Microelectromech. Syst. 2008, 17, 525–531. [Google Scholar] [CrossRef]
- Ding, H.R.; Chen, Z.H.; Ponce, C.; Zheng, Y.B. Optothermal rotation of micro-/nano-objects. Chem. Commun. 2023, 59, 2208–2221. [Google Scholar] [CrossRef]
- Li, J.G.; Alfares, A.; Zheng, Y.B. Optical manipulation and assembly of micro/nanoscale objects on solid substrates. Iscience 2022, 25, 104035. [Google Scholar] [CrossRef] [PubMed]
- Hou, Y.; Wang, H.; Fu, R.; Wang, X.; Yu, J.; Zhang, S.; Huang, Q.; Sun, Y.; Fukuda, T. A review on microrobots driven by optical and magnetic fields. Lab Chip 2023, 23, 848–868. [Google Scholar] [CrossRef]
- Hu, W.Q.; Ishii, K.S.; Ohta, A.T. Micro-assembly using optically controlled bubble microrobots. Appl. Phys. Lett. 2011, 99, 094103. [Google Scholar] [CrossRef]
- Kollipara, P.S.; Mahendra, R.; Li, J.G.; Zheng, Y.B. Bubble-pen lithography: Fundamentals and applications. Aggregate. 2022, 3, e189. [Google Scholar] [CrossRef]
- Zhou, Y.T.; Dai, L.G.; Jiao, N.D. Review of Bubble Applications in Microrobotics: Propulsion, Manipulation, and Assembly. Micromachines 2022, 13, 1068. [Google Scholar] [CrossRef]
- Xie, Y.L.; Zhao, C.L. An optothermally generated surface bubble and its applications. Nanoscale 2017, 9, 6622–6631. [Google Scholar] [CrossRef]
- Li, Y.Y.; Liu, X.M.; Huang, Q.; Ohta, A.T.; Arai, T. Bubbles in microfluidics: An all-purpose tool for micromanipulation. Lab Chip 2021, 21, 1016–1035. [Google Scholar] [CrossRef] [PubMed]
- Läubli, N.F.; Shamsudhin, N.; Vogler, H.; Munglani, G.; Grossniklaus, U.; Ahmed, D.; Nelson, B.J. 3D Manipulation and Imaging of Plant Cells using Acoustically Activated Microbubbles. Small Methods 2019, 3, 1800527. [Google Scholar] [CrossRef]
- Wang, H.; Cui, J.; Zheng, Z.; Shi, Q.; Sun, T.; Liu, X.; Huang, Q.; Fukuda, T. Assembly of RGD-Modified Hydrogel Micromodules into Permeable Three-Dimensional Hollow Microtissues Mimicking in Vivo Tissue Structures. ACS Appl. Mater. Interfaces 2017, 9, 41669–41679. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Z.; Wang, H.; Li, J.; Shi, Q.; Cui, J.; Sun, T.; Huang, Q.; Fukuda, T. 3D Construction of Shape-Controllable Tissues through Self-Bonding of Multicellular Microcapsules. ACS Appl. Mater. Interfaces 2019, 11, 22950–22961. [Google Scholar] [CrossRef]
- Zhao, Y.J.; Cho, S.K. Micro air bubble manipulation by electrowetting on dielectric (EWOD): Transporting, splitting, merging and eliminating of bubbles. Lab Chip 2007, 7, 273–280. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Lee, D.; Choi, M.; Chung, S.K. AC EWOD-induced asymmetric droplet oscillation and manipulation. Sensor. Actuat. A-Phys. 2022, 347, 113910. [Google Scholar] [CrossRef]
- Ohta, A.T.; Jamshidi, A.; Valley, J.K.; Hsu, H.Y.; Wu, M.C. Optically actuated thermocapillary movement of gas bubbles on an absorbing substrate. Appl. Phys. Lett. 2007, 91, 074103. [Google Scholar] [CrossRef] [PubMed]
- Fan, Q.H.; Hu, W.Q.; Ohta, A.T. Laser-induced microbubble poration of localized single cells. Lab Chip 2014, 14, 1572–1578. [Google Scholar] [CrossRef]
- Zhao, C.; Xie, Y.; Mao, Z.; Zhao, Y.; Rufo, J.; Yang, S.; Guo, F.; Mai, J.D.; Huang, T.J. Theory and experiment on particle trapping and manipulation via optothermally generated bubbles. Lab Chip 2014, 14, 384–391. [Google Scholar] [CrossRef]
- Dai, L.G.; Ge, Z.X.; Jiao, N.D.; Liu, L.Q. 2D to 3D Manipulation and Assembly of Microstructures Using Optothermally Generated Surface Bubble Microrobots. Small 2019, 15, 1902815. [Google Scholar] [CrossRef]
- Dai, L.G.; Lin, D.J.; Wang, X.D.; Jiao, N.D.; Liu, L.Q. Integrated Assembly and Flexible Movement of Microparts Using Multifunctional Bubble Microrobots. ACS Appl. Mater. Interfaces 2020, 12, 57587–57597. [Google Scholar] [CrossRef]
- Ge, Z.; Dai, L.; Zhao, J.; Yu, H.; Yang, W.; Liao, X.; Tan, W.; Jiao, N.; Wang, Z.; Liu, L. Bubble-based microrobots enable digital assembly of heterogeneous microtissue modules. Biofabrication 2022, 14, 025023. [Google Scholar] [CrossRef]
- Hu, W.; Fan, Q.; Ohta, A.T. Interactive actuation of multiple opto-thermocapillary flow-addressed bubble microrobots. Robot. Biomim. 2014, 1, 14. [Google Scholar] [CrossRef] [PubMed]
- Rahman, M.A.; Cheng, J.L.; Wang, Z.D.; Ohta, A.T. Cooperative Micromanipulation Using the Independent Actuation of Fifty Microrobots in Parallel. Sci. Rep. 2017, 1, 3278. [Google Scholar] [CrossRef] [PubMed]
- Dai, L.G.; Jiao, N.D.; Wang, X.D.; Liu, L.Q. A Micromanipulator and Transporter Based on Vibrating Bubbles in an Open Chip Environment. Micromachines 2017, 8, 130. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laser 1-2 | Laser 2-1 | Laser 1-2 and 2-1 | |
|---|---|---|---|
| Mean 1 | 5.86 × 108 | 6.64 × 108 | 1.22 × 109 |
| SD 1 | 1.56 × 105 | 2.16 × 105 | 6.97 × 104 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, L.; Liu, L.; Zhou, Y.; Yan, A.; Zhao, M.; Jin, S.; Ye, G.; Wang, C. Three-Dimensional Manipulation of Micromodules Using Twin Optothermally Actuated Bubble Robots. Micromachines 2024, 15, 230. https://doi.org/10.3390/mi15020230
Dai L, Liu L, Zhou Y, Yan A, Zhao M, Jin S, Ye G, Wang C. Three-Dimensional Manipulation of Micromodules Using Twin Optothermally Actuated Bubble Robots. Micromachines. 2024; 15(2):230. https://doi.org/10.3390/mi15020230
Chicago/Turabian StyleDai, Liguo, Lichao Liu, Yuting Zhou, Aofei Yan, Mengran Zhao, Shaobo Jin, Guoyong Ye, and Caidong Wang. 2024. "Three-Dimensional Manipulation of Micromodules Using Twin Optothermally Actuated Bubble Robots" Micromachines 15, no. 2: 230. https://doi.org/10.3390/mi15020230
APA StyleDai, L., Liu, L., Zhou, Y., Yan, A., Zhao, M., Jin, S., Ye, G., & Wang, C. (2024). Three-Dimensional Manipulation of Micromodules Using Twin Optothermally Actuated Bubble Robots. Micromachines, 15(2), 230. https://doi.org/10.3390/mi15020230