
Design and Demonstration of an In-Plane Micro-Optical-Electro-Mechanical-System Accelerometer Based on Talbot Effect of Dual-Layer Gratings



Abstract
:1. Introduction
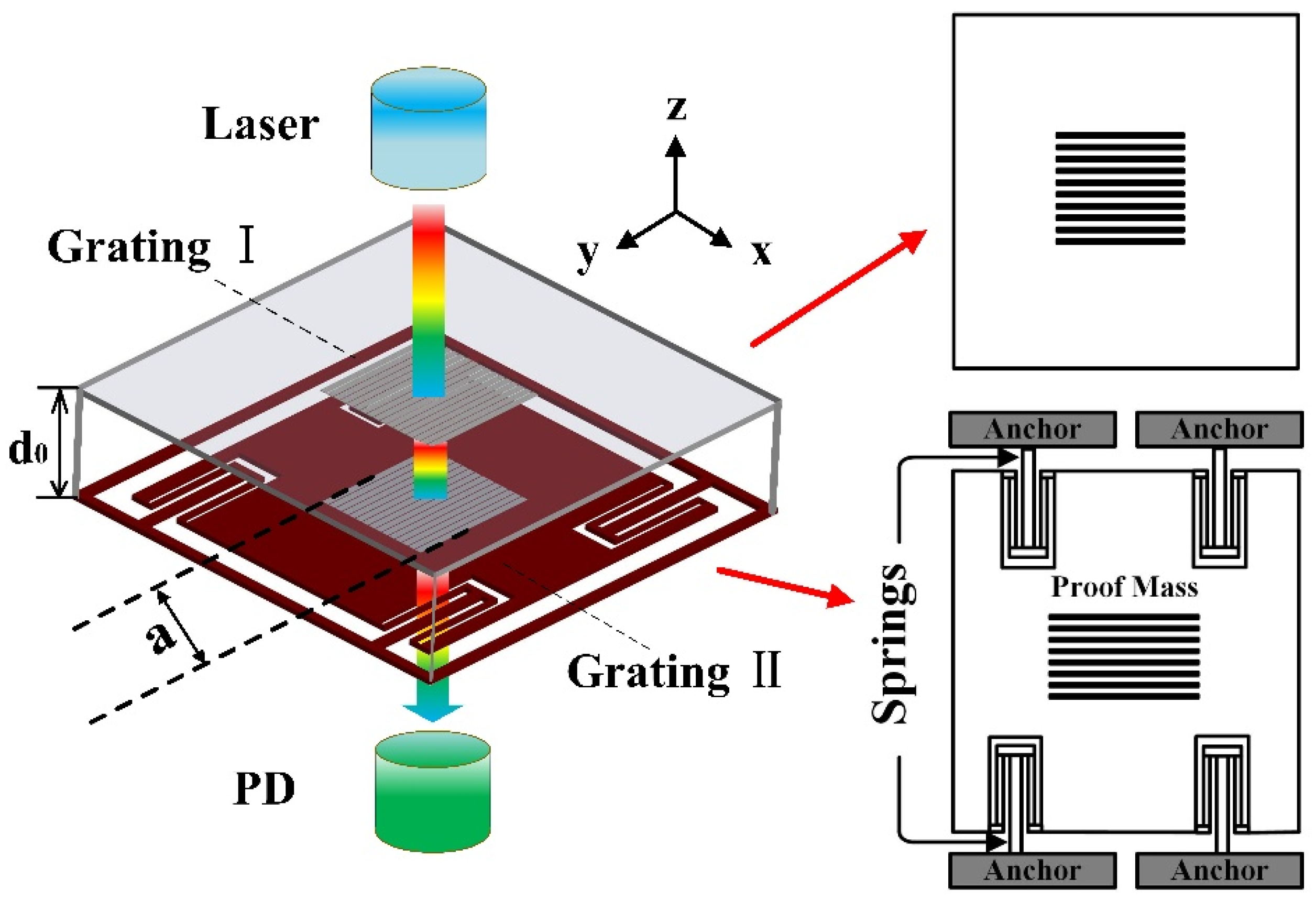
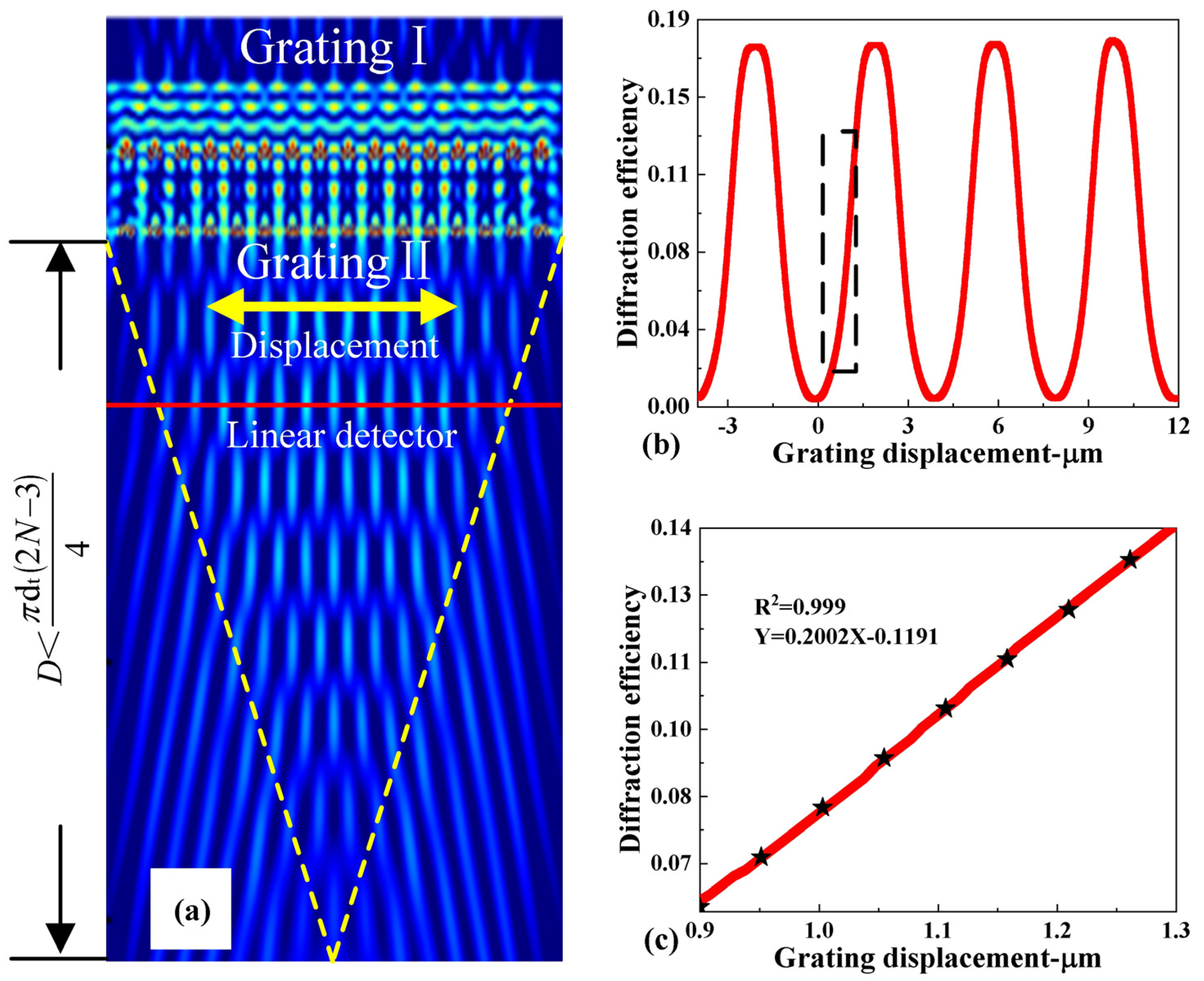
2. Sensing Principle
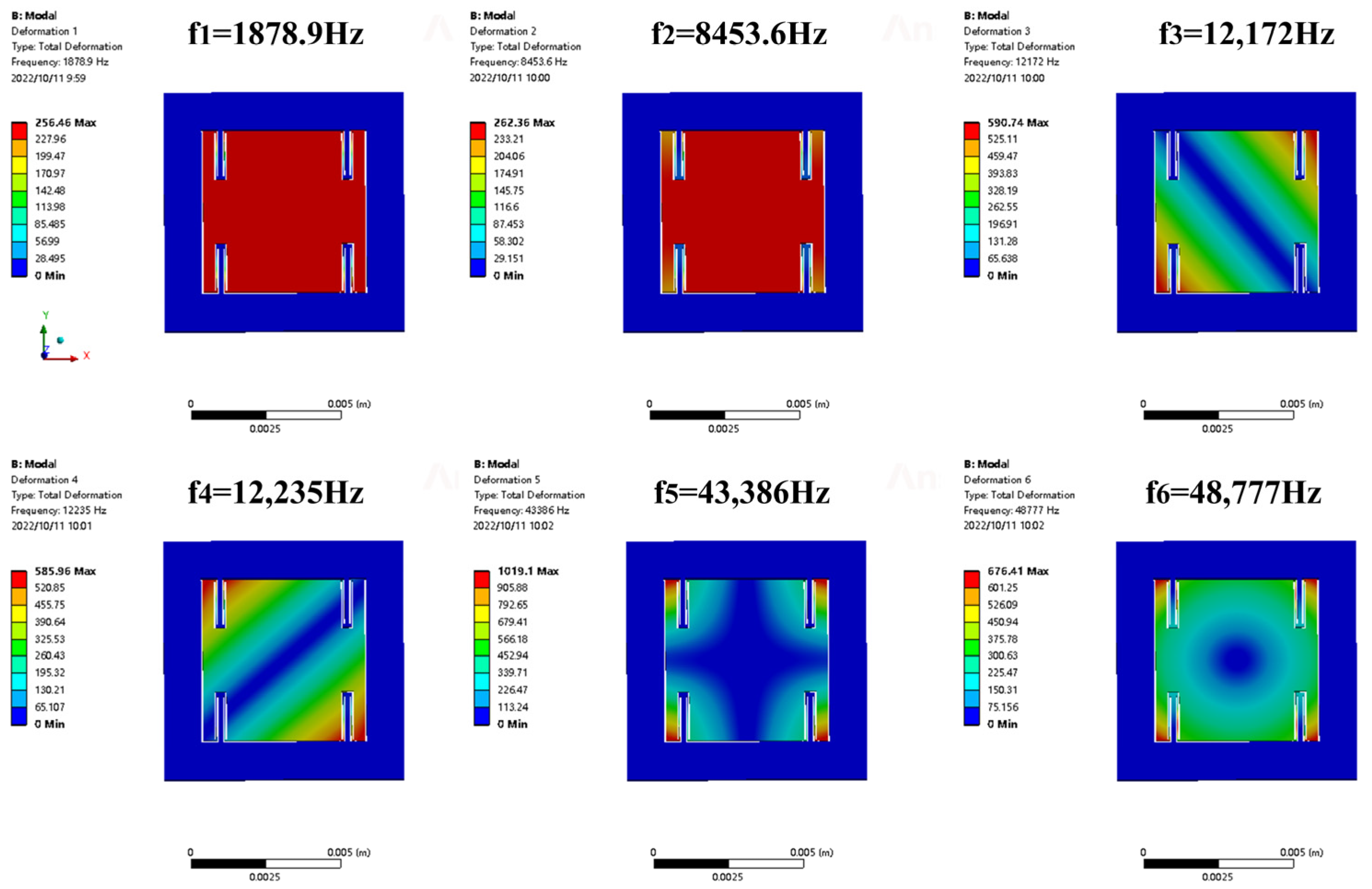
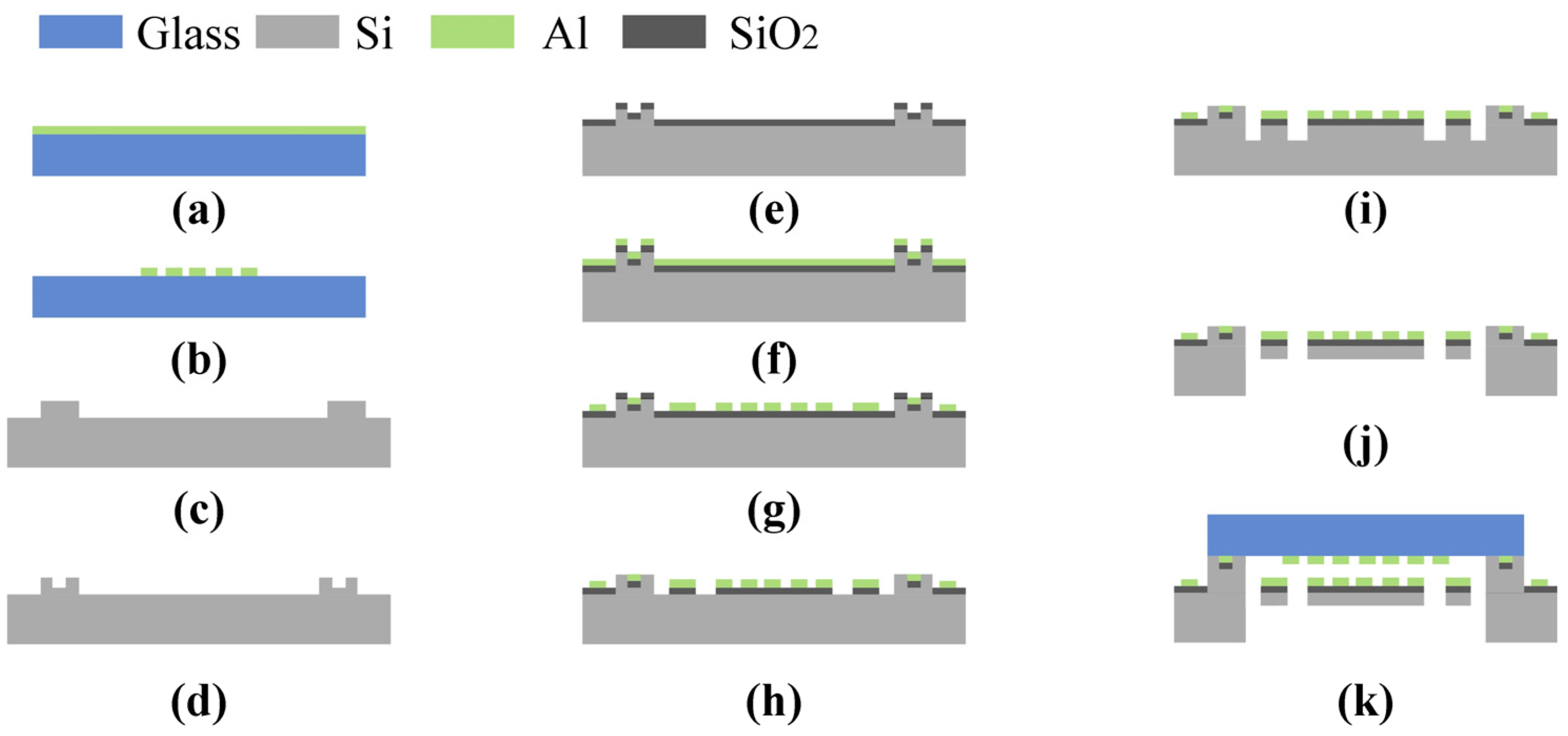
3. The Design and Fabrication of MOEMS Accelerometer
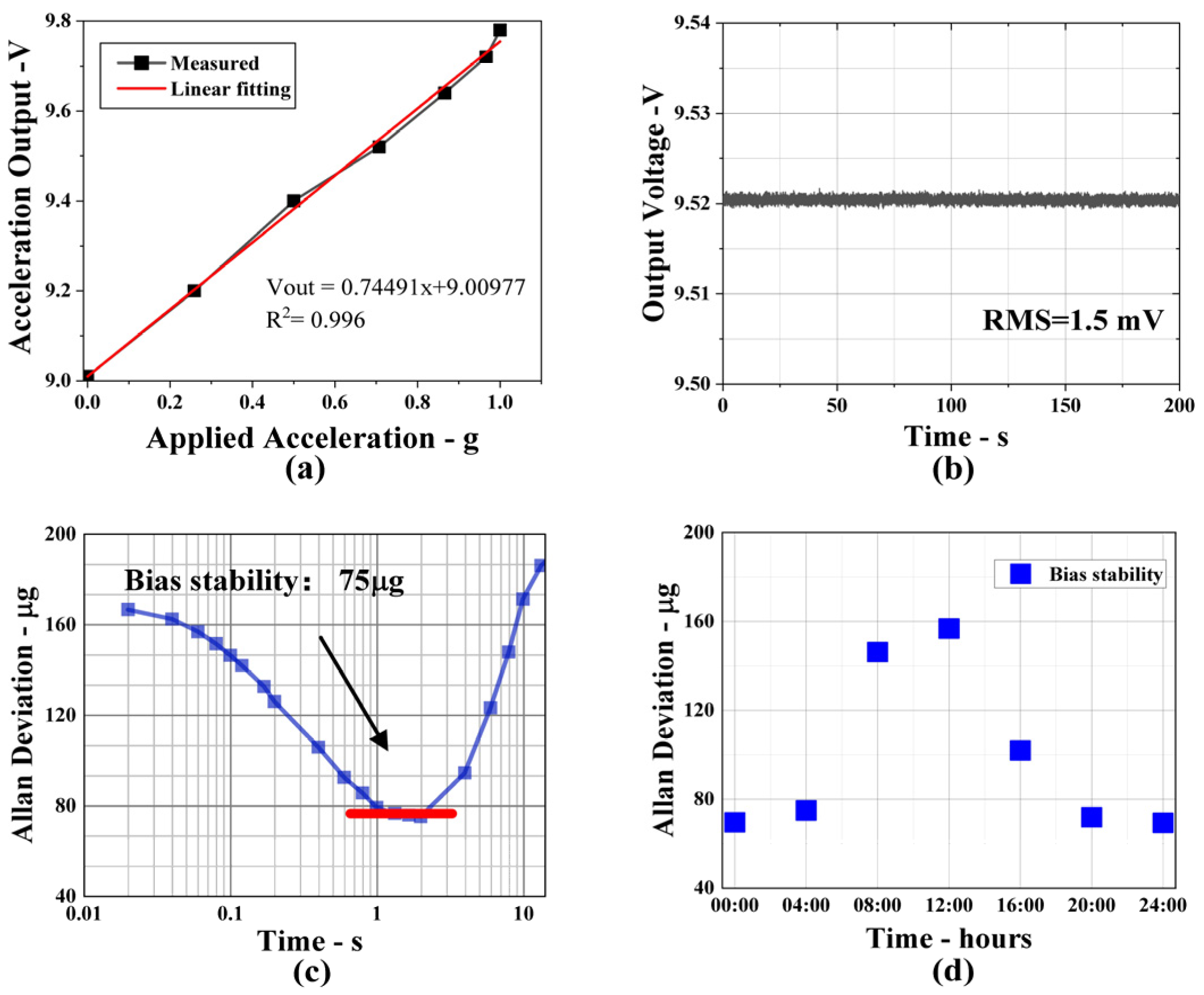
4. Experiment and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Solai, K.; Rathnasami, J.D.; Koilmani, S. SOI Structure Employed Area Dependant Capacitive MEMS Accelerometer with Novel C-V Converter. Microsyst. Technol. 2022, 5, 1191–1201. [Google Scholar] [CrossRef]
- Daeichin, M.; Miles, R.N.; Towfighian, S. Large-Stroke Capacitive MEMS Accelerometer without Pull-In. IEEE Sens. J. 2021, 3, 3097–3106. [Google Scholar] [CrossRef]
- Lu, Q.; Bai, J.; Wang, K.; He, S. Design, Optimization, and Realization of a High-Performance MOEMS Accelerometer from a Double-Device-Layer SOI Wafer. J. Microelectromech. Syst. 2017, 26, 859–869. [Google Scholar] [CrossRef]
- Le, X.; Shi, Q.; Vachon, P.; Ng, E.J.; Lee, C. Piezoelectric MEMS-Evolution from Sensing Technology to Diversified Applications in the 5G/Internet of Things (IoT) Era. J. Micromech. Microeng. 2022, 32, 014005. [Google Scholar] [CrossRef]
- Wang, C.; Hao, Y.; Sun, Z.; Zu, L.; Yuan, W.; Chang, H. Design of a Capacitive MEMS Accelerometer with Softened Beams. Micromachines 2022, 13, 459. [Google Scholar] [CrossRef]
- Li, H.; Deng, K.; Gao, S.; Feng, L. Design of Closed-Loop Parameters with High Dynamic Performance for Micro-Grating Accelerometer. IEEE Access 2019, 7, 151939–151947. [Google Scholar] [CrossRef]
- Tez, S.; Aykutlu, U.; Torunbalci, M.M.; Akin, T. A Bulk-Micromachined Three-Axis Capacitive MEMS Accelerometer on a Single Die. J. Microelectromech. Syst. 2015, 24, 1264–1274. [Google Scholar] [CrossRef]
- Mo, Y.; Yang, J.; Peng, B.; Xie, G.; Tang, B. Design and Verification of a Structure for Isolating Stress in Sandwich MEMS Accelerometer. Microsyst. Technol. 2021, 27, 1943–1950. [Google Scholar] [CrossRef]
- Xu, Y.; Zhao, L.; Jiang, Z.; Ding, J.; Xu, T.; Zhao, Y. Analysis and Design of a Novel Piezoresistive Accelerometer with Axially Stressed Self-Supporting Sensing Beams. Sens. Actuators A Phys. 2016, 247, 1–11. [Google Scholar] [CrossRef]
- Trigona, C.; Ando, B.; Baglio, S. Design, Fabrication, and Characterization of BESOI-Accelerometer Exploiting Photonic Bandgap Materials. IEEE Trans. Instrum. Meas. 2014, 63, 702–710. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, H.; Feng, L.; Wang, X.; Zhang, Y. Noise Suppression of a Micro-Grating Accelerometer Based on the Dual Modulation Method. Appl. Opt. 2017, 56, 10003. [Google Scholar] [CrossRef]
- Aydemir, A.; Terzioglu, Y.; Akin, T. A New Design and a Fabrication Approach to Realize a High Performance Three Axes Capacitive MEMS Accelerometer. Sens. Actuators A Phys. 2016, 244, 324–333. [Google Scholar] [CrossRef]
- Yao, B.-Y.; Zhou, Z.; Feng, L.-S.; Wang, W.-P.; Wang, X. Structural Design of a Compact In-Plane Nano-Grating Accelerometer. Chin. Phys. Lett. 2012, 29, 118502. [Google Scholar] [CrossRef]
- Xie, K.; Zhang, R.; Xin, C.; Jin, L.; Wang, Z.; Wang, Z.; Li, M.; Zhao, H. Micro-Opto-Electro-Mechanical Gyroscope Based on the Talbot Effect of a Single-Layer near-Field Diffraction Grating. Appl. Opt. 2021, 60, 3724. [Google Scholar] [CrossRef] [PubMed]
- Krishnamoorthy, U.; Olsson, R.H.; Bogart, G.R.; Baker, M.S.; Carr, D.W.; Swiler, T.P.; Clews, P.J. In-Plane MEMS-Based Nano-g Accelerometer with Sub-Wavelength Optical Resonant Sensor. Sens. Actuators A Phys. 2008, 145, 283–290. [Google Scholar] [CrossRef]
- Long, L.; Guo, Z.; Zhong, S. A MEMS Accelerometer Based on Wavelength Modulation Using an Integrated Blazed Grating. IEEE Sens. J. 2019, 19, 877–884. [Google Scholar] [CrossRef]
- Li, M.; Wang, Z.; Geng, H.; Wu, Q.; Zhang, R.; Cui, Z.; Wang, X.; Wang, G. Structural Design and Simulation of a Micro-Gyroscope Based on Nano-Grating Detection. Microsyst. Technol. 2019, 25, 1627–1637. [Google Scholar] [CrossRef]
- Malayappan, B.; Krishnaswamy, N.; Pattnaik, P.K. Novel High-Resolution Lateral Dual-Axis Quad-Beam Optical MEMS Accelerometer Using Waveguide Bragg Gratings. Photonics 2020, 7, 49. [Google Scholar] [CrossRef]
- Sheikhaleh, A.; Abedi, K.; Jafari, K. A Proposal for an Optical MEMS Accelerometer Relied on Wavelength Modulation with One Dimensional Photonic Crystal. J. Light. Technol. 2016, 34, 5244–5249. [Google Scholar] [CrossRef]
- Sheikhaleh, A.; Abedi, K.; Jafari, K. An Optical MEMS Accelerometer Based on a Two-Dimensional Photonic Crystal Add-Drop Filter. J. Light. Technol. 2017, 35, 3029–3034. [Google Scholar] [CrossRef]
- Qu, Z.; Ouyang, H.; Liu, H.; Hu, C.; Tu, L.-C.; Zhou, Z. 2.4 Ng/√Hz Low-Noise Fiber-Optic MEMS Seismic Accelerometer. Opt. Lett. 2022, 47, 718. [Google Scholar] [CrossRef] [PubMed]
- da Costa Antunes, P.F.; Lima, H.F.T.; Alberto, N.J.; Rodrigues, H.; Pinto, P.M.F.; de Lemos Pinto, J.; Nogueira, R.N.; Varum, H.; Costa, A.G.; de Brito Andre, P.S. Optical Fiber Accelerometer System for Structural Dynamic Monitoring. IEEE Sens. J. 2009, 9, 1347–1354. [Google Scholar] [CrossRef]
- Gao, S.; Zhou, Z.; Zhang, Y.; Deng, K.; Feng, L. High-Resolution Micro-Grating Accelerometer Based on a Gram-Scale Proof Mass. Opt. Express 2019, 27, 34298–34311. [Google Scholar] [CrossRef]
- Lu, Q.; Wang, C.; Bai, J.; Wang, K.; Lou, S.; Jiao, X.; Han, D.; Yang, G.; Liu, D.; Yang, Y. Minimizing Cross-Axis Sensitivity in Grating-Based Optomechanical Accelerometers. Opt. Express 2016, 24, 9094–9111. [Google Scholar] [CrossRef]
- Jin, L.; Wang, C.; Jin, L.; Chen, W.; Xu, H.; Cui, M.; Li, M. Micro-Opto-Electro-Mechanical Systems Accelerometer Based on the Talbot Effect of Double-Layer Diffraction Gratings. Appl. Opt. 2022, 61, 5386. [Google Scholar] [CrossRef] [PubMed]
- Teng, S.; Zhang, N.; Dong, Q.; Cheng, C. Diffraction of a One-Dimensional Phase Grating in the Deep Fresnel Field. J. Opt. Soc. Am. A 2007, 24, 3636. [Google Scholar] [CrossRef]
- Mehdi, A.-B.; Lou, X.-P.; Dong, M.-L.; Li, C.-B.; Feng, S.; Saviz, P.; Zhu, L.-Q. Geometrical Condition for Observing Talbot Effect in Plasmonics Infinite Metallic Groove Arrays. Chin. Phys. B 2018, 27, 124204. [Google Scholar] [CrossRef]
- Solak, H.H.; Dais, C.; Clube, F. Displacement Talbot Lithography: A New Method for High-Resolution Patterning of Large Areas. Opt. Express 2011, 19, 10686. [Google Scholar] [CrossRef]
- Li, M.; Geng, H.; Wu, Q.; Zhang, R.; Han, Y.; Wang, G. Application of Double Metal/Dielectric Gratings in Optical Displacement Detection. Appl. Opt. 2018, 57, 3438. [Google Scholar] [CrossRef]
- Wen, J.; Zhang, Y.; Xiao, M. The Talbot Effect: Recent Advances in Classical Optics, Nonlinear Optics, and Quantum Optics. Adv. Opt. Photon. 2013, 5, 83. [Google Scholar] [CrossRef]
- Zhang, Y.; Wen, J.; Zhu, S.N.; Xiao, M. Nonlinear Talbot Effect. Phys. Rev. Lett. 2010, 104, 183901. [Google Scholar] [CrossRef] [PubMed]
- Zhao, M.; Wei, X.; Bai, H.; Wang, H. Design and Simulation of a MEMS Fabry–Perot Accelerometer with Ultra-Low Cross-Axis Sensitivity. Smart Mater. Struct. 2020, 29, 085029. [Google Scholar] [CrossRef]
- Kavitha, S.; Joseph Daniel, R.; Sumangala, K. High Performance MEMS Accelerometers for Concrete SHM Applications and Comparison with COTS Accelerometers. Mech. Syst. Signal Process 2016, 67, 410–424. [Google Scholar] [CrossRef]
- Kavitha, S.; Daniel, R.J.; Sumangala, K. A Simple Analytical Design Approach Based on Computer Aided Analysis of Bulk Micromachined Piezoresistive MEMS Accelerometer for Concrete SHM Applications. Measurement 2013, 46, 3372–3388. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameter | Values |
|---|---|
| Young’s modulus of silicon | 170 GPa |
| The Poisson ratio of silicon | 0.28 |
| Density of silicon | 2329 kg/m3 |
| Supporting beam length | 1500 μm |
| Supporting beam width | 150 μm |
| Sensing beam length | 1300 μm |
| Sensing beam width | 30 μm |
| The gap between two beams | 50 μm |
| Frame length | 4800 μm |
| Mass block thickness | 100 μm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Jin, L.; Wang, Z.; Peng, H.; Li, M. Design and Demonstration of an In-Plane Micro-Optical-Electro-Mechanical-System Accelerometer Based on Talbot Effect of Dual-Layer Gratings. Micromachines 2023, 14, 1301. https://doi.org/10.3390/mi14071301
Chen W, Jin L, Wang Z, Peng H, Li M. Design and Demonstration of an In-Plane Micro-Optical-Electro-Mechanical-System Accelerometer Based on Talbot Effect of Dual-Layer Gratings. Micromachines. 2023; 14(7):1301. https://doi.org/10.3390/mi14071301
Chicago/Turabian StyleChen, Wenqing, Li Jin, Zhibin Wang, Haifeng Peng, and Mengwei Li. 2023. "Design and Demonstration of an In-Plane Micro-Optical-Electro-Mechanical-System Accelerometer Based on Talbot Effect of Dual-Layer Gratings" Micromachines 14, no. 7: 1301. https://doi.org/10.3390/mi14071301
APA StyleChen, W., Jin, L., Wang, Z., Peng, H., & Li, M. (2023). Design and Demonstration of an In-Plane Micro-Optical-Electro-Mechanical-System Accelerometer Based on Talbot Effect of Dual-Layer Gratings. Micromachines, 14(7), 1301. https://doi.org/10.3390/mi14071301