
Seamless MEMS-INS/Geomagnetic Navigation System Based on Deep-Learning Strong Tracking Square-Root Cubature Kalman Filter


Abstract
:1. Introduction
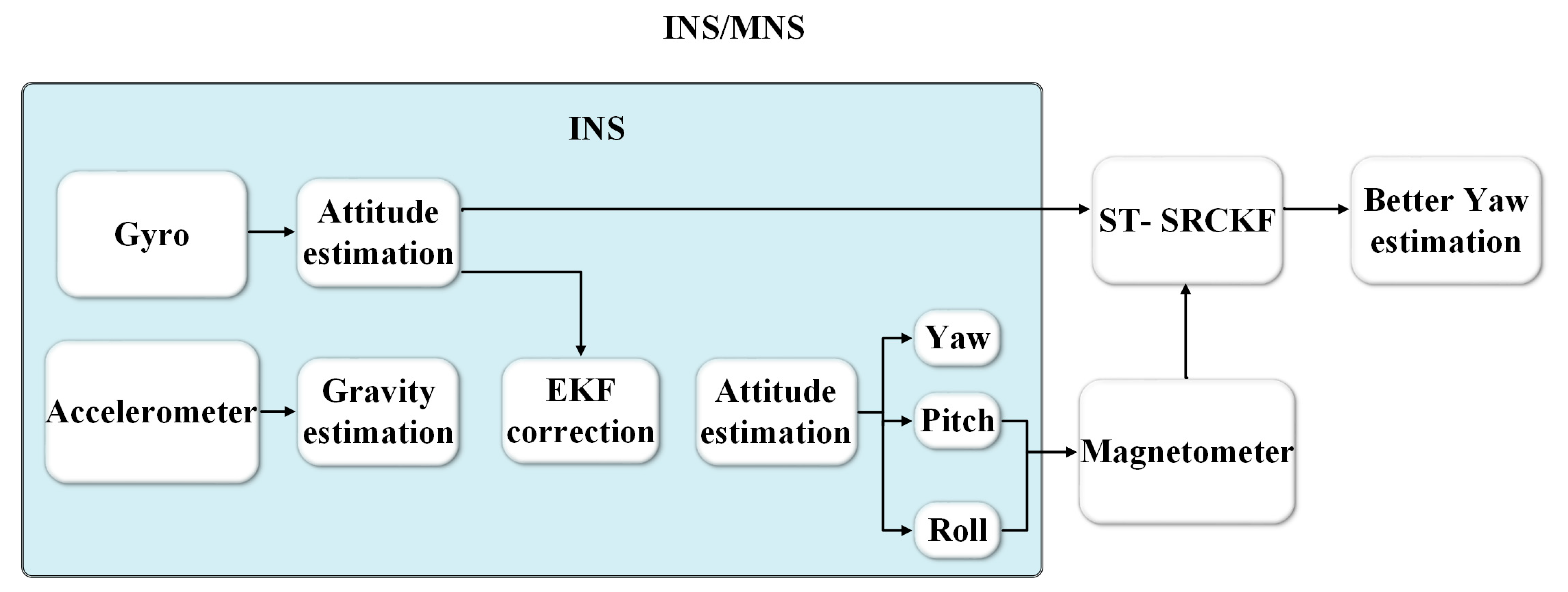
2. Inertial Navigation Systems/Geomagnetic Navigation Systems (INS/MNS) Navigation Model Based on Strongly Tracked Square-Root Cubature Kalman Filter (ST-SRCKF)
- (1)
- Time update:
- (2)
- Update the observation:
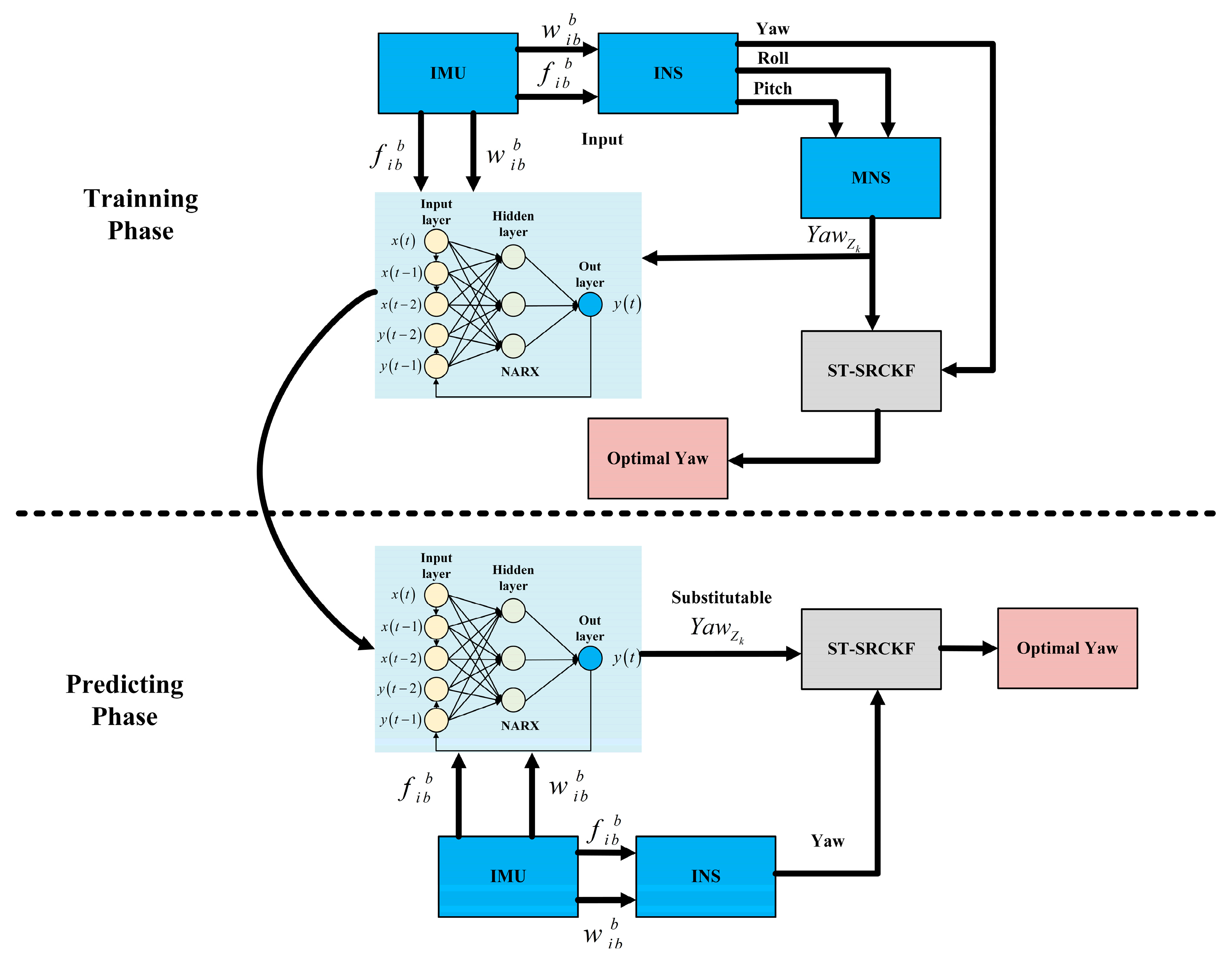
3. Seamless Fusion Strategy Based on Nonlinear Autoregressive with Exogenous Input (NARX)
3.1. Nonlinear Autoregressive Networks with Exogenous Input
3.2. Seamless Fusion Structure Based on NARX-Integrated ST-SRCKF
4. Experimental Results and Analysis
- (1)
- Method 1: Reference system.
- (2)
- Method 2: Pure INS algorithm.
- (3)
- Method 3: Pure Mag algorithm.
- (4)
- Method 4: EKF INS/MNS algorithm.
- (5)
- Method 5: CKF INS/MNS algorithm.
- (6)
- Method 6: ST-EKF INS/MNS algorithm.
- (7)
- Method 7: ST-SRCKF INS/MNS algorithm.
- (8)
- Method 8: NARX-ST-SRCKF INS/MNS algorithm.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Parameter | Value |
|---|---|---|
| SPAN-KVH1750 | Heading angle accuracy Frequency | 0.035° 100 HZ |
| CMP10A-10Axis Attitude Sensor | Accelerometer resolution Gyroscope resolution Magnetometer resolution | 0.0005 (g/LSB) 0.061 (°/s) 0.0667 mGauss/LSB |
4.1. Verification of the ST-SRCKF Algorithm
4.2. Verification of the Seamless Fusion Structure
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Groves, P. The Complexity Problem in Future Multisensor Navigation and Positioning Systems: A Modular Solution. J. Navig. 2014, 67, 311–326. [Google Scholar] [CrossRef]
- Ye, F.; Pan, S.; Gao, W.; Wang, H.; Liu, G.; Ma, C.; Wang, Y. An Improved Single-Epoch GNSS/INS Positioning Method for Urban Canyon Environment Based on Real-Time DISB Estimation. IEEE Access 2020, 8, 227566–227578. [Google Scholar] [CrossRef]
- Xu, Y.; Shmaliy, Y.S.; Bi, S.; Chen, X.; Zhuang, Y. Extended Kalman/UFIR Filters for UWB-Based Indoor Robot Locali-zation Under Time-Varying Colored Measurement Noise. IEEE Internet Things J. 2023, 10, 15632–15641. [Google Scholar] [CrossRef]
- Zheng, H.; Wang, H.; Wu, L.; Chai, H.; Wang, Y. Simulation Research on Gravity-Geomagnetism Combined Aided Underwater Navigation. J. Navig. 2013, 66, 83–98. [Google Scholar] [CrossRef]
- Liu, X.; Tang, J.; Shen, C.; Wang, C.; Guo, X.; Li, J.; Liu, J. Brain-like Position Measurement Method based on Improved Optical Flow Algorithm. ISA Trans. 2023, in press. [Google Scholar] [CrossRef] [PubMed]
- Shen, C.; Zhao, X.; Wu, X.; Cao, H.; Wang, C.; Tang, J.; Liu, J. Multi-aperture Visual Velocity Measurement Method based on Biomimetic Compound-eye for UAVs. IEEE Internet Things J. 2023; in press. [Google Scholar] [CrossRef]
- Li, R.; Wang, Z.; Chen, P. Development the method of pipeline bending strain measurement based on microelectromechanical systems inertial measurement unit. Sci. Prog. 2020, 103, 0036850420925231. [Google Scholar] [CrossRef] [PubMed]
- Grenon, G.; An, P.E.; Smith, S.M.; Healey, A.J. Enhancement of the Inertial Navigation System for the Morpheus Autonomous Underwater Vehicles. IEEE J. Ocean. Eng. 2001, 26, 548–560. [Google Scholar] [CrossRef]
- Madrigal, J.A.B.; Negrete, J.C.; Mu, R.; ContrerasRodríguez, L.A.; Sossa, H. 3D Motion tracking of the shoulder joint with respect to thethorax using MARG sensors and data fusion algorithm. Biocybern. Biomed. Eng. 2020, 40, 1205–1224. [Google Scholar] [CrossRef]
- Nazarahari, M.; Rouhani, H. Sensor fusion algorithms for orientation tracking via magnetic and inertial measurement units: An experimental comparison survey. Inf. Fusion 2021, 76, 8–23. [Google Scholar] [CrossRef]
- Guo, X.; Tang, J.; Li, J.; Shen, C.; Liu, J. Attitude measurement based on imaging ray tracking model and orthographic projection with iteration algorithm. ISA Trans. 2019, 95, 379–391. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, Y.; Han, Z.; Shao, X.; Gao, J.; Huang, K.; Shi, Y.; Tang, J.; Shen, C.; Liu, J. Pole-Zero Temperature Compensation Circuit Design and Experiment for Dual-Mass MEMS Gyroscope Bandwidth Expansion. IEEE-ASME Trans. Mechatron. 2019, 24, 677–688. [Google Scholar] [CrossRef]
- Huiliang, C.; Yingjie, Z.; Chong, S.; Liu, Y.; Xinwang, W. Temperature Energy Influence Compensation for MEMS Vibration Gyroscope Based on RBF NN-GA-KF Method. Shock Vib. 2018, 2018, 2830686. [Google Scholar]
- Gao, B.; Hu, G.; Zhong, Y.; Zhu, X. Cubature Kalman Filter With Both Adaptability and Robustness for Tightly-Coupled GNSS/INS Integration. IEEE Sens. J. 2021, 21, 14997–15011. [Google Scholar] [CrossRef]
- Hu, G.; Wang, W.; Zhong, Y.; Gao, B.; Gu, C. A new direct filtering approach to INS/GNSS integration. Aerosp. Sci. Technol. 2018, 77, 755–764. [Google Scholar] [CrossRef]
- He, J.; Guo, Z. Laplace ℓ1 Square-Root Cubature Kalman Filter for Non-Gaussian Measurement Noises. Circuits Syst. Signal Process. 2022, 41, 3328–3349. [Google Scholar] [CrossRef]
- Chen, T.; Xu, X.; Chen, L.; Jiang, H.; Cai, Y.; Li, Y. Estimation of longitudinal force, lateral vehicle speed and yaw rate for four-wheel independent driven electric vehicles. Mech. Syst. Sig. Process. 2018, 101, 377–388. [Google Scholar] [CrossRef]
- Wang, G.; Xu, X.; Yao, Y.; Tong, J. A Novel BPNN-Based Method to Overcome the GPS Outages for INS/GPS System. IEEE Access 2019, 7, 82134–82143. [Google Scholar] [CrossRef]
- Zhu, X.; Havyarimana, V.; Li, T.; Wang, D. A Nonlinear Framework of Delayed Particle Smoothing Method for Vehicle Localization under Non-Gaussian Environment. Sensors 2016, 16, 692–708. [Google Scholar]
- Linzhouting, C.; Jiancheng, F. A hybrid prediction method for bridging GPS outages in high-precision pos application. IEEE Trans. Instrum. Meas. 2014, 63, 1656–1665. [Google Scholar] [CrossRef]
- Li, D.; Zhou, J.; Liu, Y. Recurrent-neural-network-based unscented Kalman filter for estimating and compensating the random drift of MEMS gyroscopes in real time. Mech. Syst. Signal Process. 2021, 147, 107057. [Google Scholar] [CrossRef]
- Shen, C.; Zhang, Y.; Guo, X.; Chen, X.; Cao, H.; Tang, J.; Li, J.; Liu, J. Seamless GPS/Inertial Navigation System Based on Self-Learning Square-Root Cubature Kalman Filter. IEEE Trans. Ind. Electron. 2021, 68, 499–508. [Google Scholar] [CrossRef]
- Yu, B.; Shu, W.; Cao, C. A Novel Modeling Method for Aircraft Engine Using Nonlinear Autoregressive Exogenous (NARX) Models Based on Wavelet Neural Networks. Int. J. Turbo Jet-Engines 2018, 35, 161–169. [Google Scholar] [CrossRef]
- Louzazni, M.; Mosalam, H.; Cotfas, D.T. Forecasting of photovoltaic power by means of non-linear auto-regressive exogenous artificial neural network and time series analysis. Electronics 2021, 10, 1953. [Google Scholar] [CrossRef]
- Sabatelli, S.; Galgani, M.; Fanucci, L.; Rocchi, A. A Double-Stage Kalman Filter for Orientation Tracking with an Integrated Processor in 9-D IMU. IEEE Trans. Instrum. Meas. 2013, 62, 590–598. [Google Scholar] [CrossRef]
- Mai, C.V.; Spiridonakos, M.D.; Chatzi, E.N.; Sudret, B. Surrogate modeling for stochastic dynamical systems by combining nonlinear autoregressive with exogenous input models and polynomial chaos expansions. Int. J. Uncertain. Quantif. 2016, 6, 313–339. [Google Scholar] [CrossRef]
- Cheng, A.; Low, Y.M. Improved generalization of NARX neural networks for enhanced metamodeling of nonlinear dynamic systems under stochastic excitations. Mech. Syst. Signal Process. 2023, 200, 110543. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, H. mVIL-Fusion: Monocular Visual-Inertial-LiDAR Simultaneous Localization and Mapping in Challenging Environments. IEEE Robot. Autom. Lett. 2023, 8, 504–511. [Google Scholar] [CrossRef]
- Lee, W.; Kang, M.-H.; Song, J.; Hwang, K. The Design of Preventive Automated Driving Systems Based on Convolutional Neural Network. Electronics 2021, 10, 1737. [Google Scholar] [CrossRef]
- Wu, Z.; Sun, J.; Hong, S. RBFNN-Based Adaptive Event-Triggered Control for Heterogeneous Vehicle Platoon Consensus. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18761–18773. [Google Scholar] [CrossRef]





| Method | Median | Max | Min | RMS | Improvement (RMS) |
|---|---|---|---|---|---|
| Method 2 Method 3 | 11.16 0.02 | 19.61 8.16 | 0.0021 8 × 10−5 | 13.04 2.78 | \ \ |
| Method 4 | 0.04 | 6.41 | 5 × 10−5 | 2.49 | 80.90% |
| Method 5 | 0.16 | 4.97 | 10−4 | 2.22 | 82.98% |
| Method 6 Method 7 | 0.11 0.03 | 4.29 2.80 | 7 × 10−5 7 × 10−5 | 1.65 1.29 | 87.35% 90.10% |
| Method | Median | Max | Min | RMS | Improvement (RMS) |
|---|---|---|---|---|---|
| Method2 Method3 | 11.16 0.55 | 19.61 17.7 | 0.0021 8 × 10−5 | 13.04 6.50 | \ \ |
| Method8 | 0.01 | 3.31 | 2 × 10−5 | 1.33 | 89.80% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, T.; Wang, C.; Shen, C. Seamless MEMS-INS/Geomagnetic Navigation System Based on Deep-Learning Strong Tracking Square-Root Cubature Kalman Filter. Micromachines 2023, 14, 1935. https://doi.org/10.3390/mi14101935
Zhao T, Wang C, Shen C. Seamless MEMS-INS/Geomagnetic Navigation System Based on Deep-Learning Strong Tracking Square-Root Cubature Kalman Filter. Micromachines. 2023; 14(10):1935. https://doi.org/10.3390/mi14101935
Chicago/Turabian StyleZhao, Tianshang, Chenguang Wang, and Chong Shen. 2023. "Seamless MEMS-INS/Geomagnetic Navigation System Based on Deep-Learning Strong Tracking Square-Root Cubature Kalman Filter" Micromachines 14, no. 10: 1935. https://doi.org/10.3390/mi14101935
APA StyleZhao, T., Wang, C., & Shen, C. (2023). Seamless MEMS-INS/Geomagnetic Navigation System Based on Deep-Learning Strong Tracking Square-Root Cubature Kalman Filter. Micromachines, 14(10), 1935. https://doi.org/10.3390/mi14101935