
Design, Simulation, and Fabrication of a New Three-Axis Inertial Switch with a Triangular Movable Electrode Structure

Abstract
1. Introduction
2. Structure Design
3. Theoretical Analysis and Simulation
3.1. Static Mechanical Analysis
3.2. Dynamic Simulation Analysis
4. Fabrication and Test
4.1. Fabrication of the Prototype
4.2. Test of the Prototype
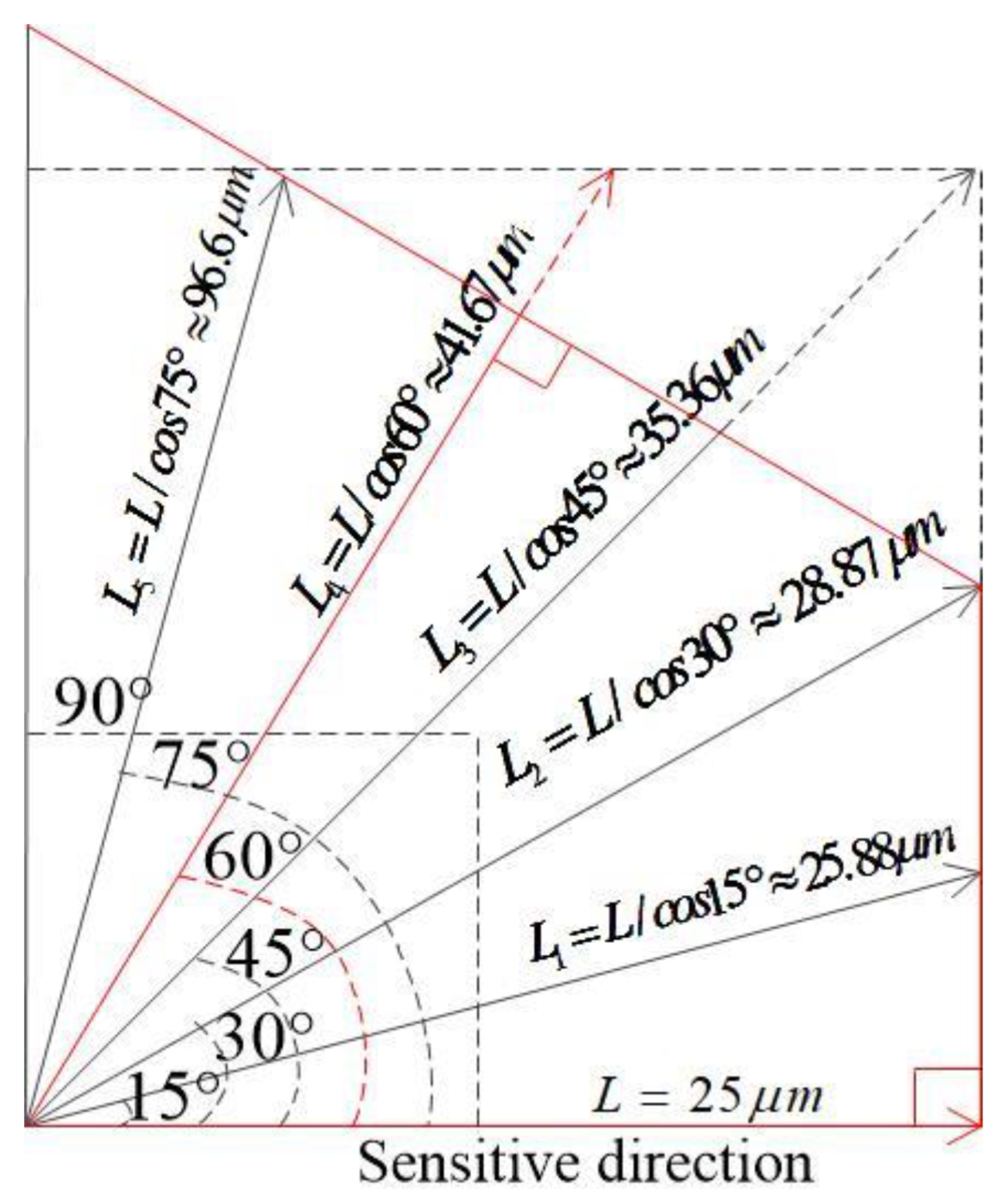
- When the applied acceleration’s direction deviates from the sensitive direction, the threshold increases with the increment of the angle, indicating that the designed three-axis sensitive inertial switch has the minimum threshold in the designed sensitive direction.
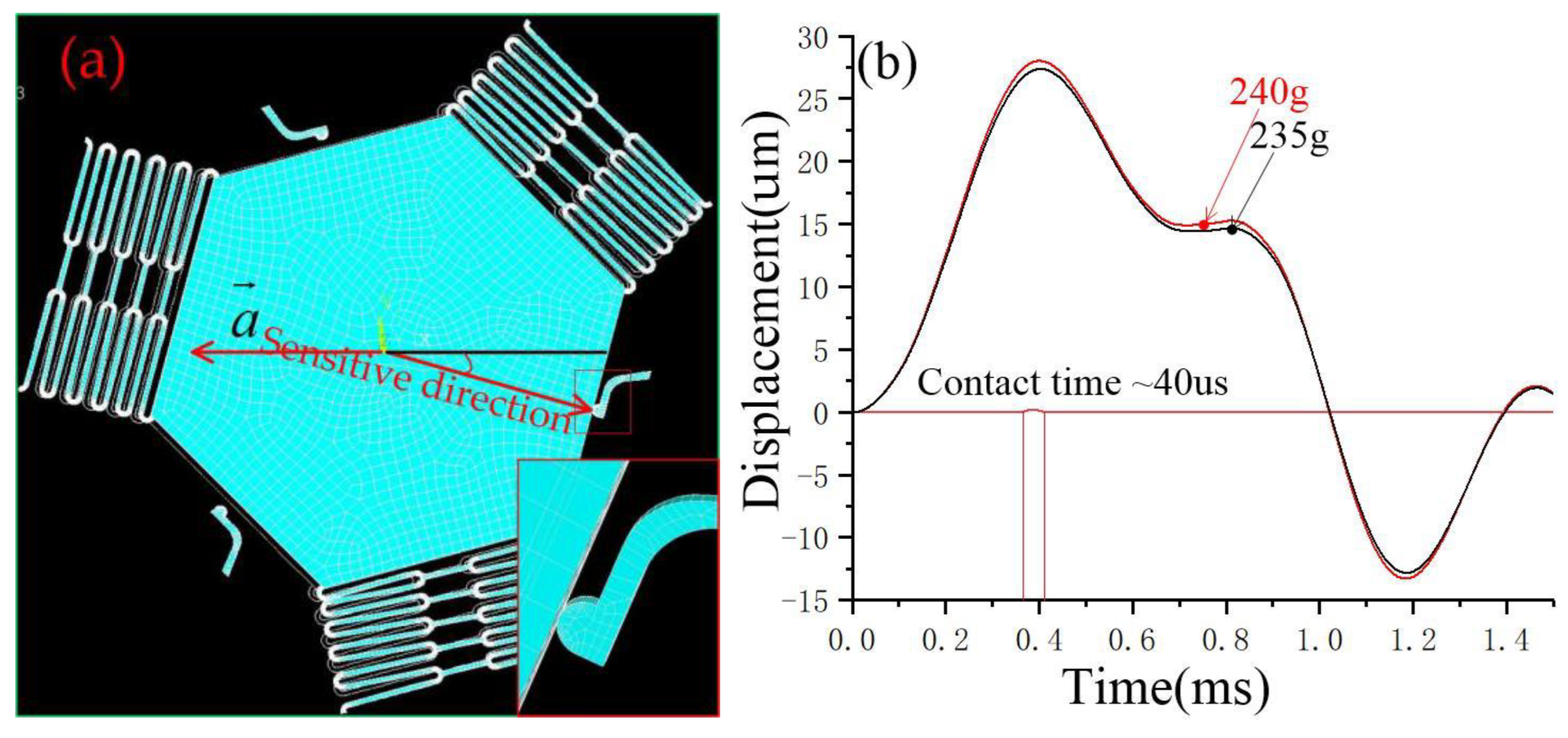
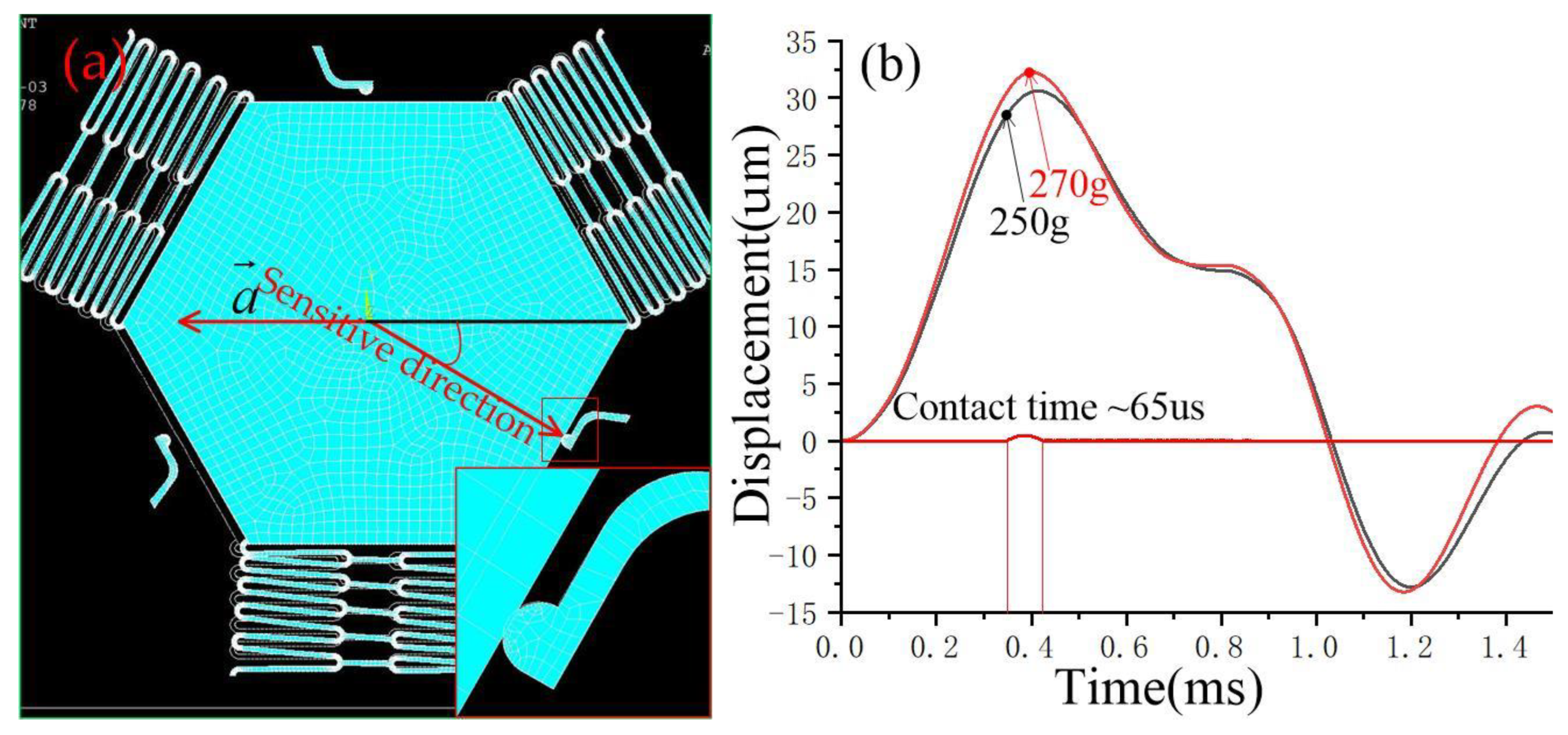
- The contact time decreases first and then increases as the angle of acceleration deviates from the sensitive direction. Significantly, when the acceleration direction deviates from the sensitive direction by more than 45 degrees, the contact time increases when the active electrode contacts two fixed electrodes simultaneously under threshold acceleration. The analysis shows that the simultaneous action of the two electrodes hinders the elastic recovery of the movable electrode, thus prolonging the contact time.
- The experimental results show that the threshold and contact time of the designed triaxial inertia switch is different from the simulation results. This is because there are errors between the experimental and design parameters, such as the line width of the suspension springs, the thickness of the mass block, the gap between the electrodes, and so on. At the same time, the test results also show that the larger the acceleration deviates from the sensitive direction, the larger the threshold, which was mutually verified with the simulation results.
- The test results show that the contact time of the inertial switch in different directions is different from the simulation analysis, which is believed to be because the effect of friction resistance between electrodes is ignored in the simulation analysis, resulting in the difference between the theoretical analysis and the actual measured value.
- When the acceleration is applied to the prototype in the direction away from the sensitive direction one of 60°, it is equivalent to the opposite direction of the sensitive direction three. The test results show that the fixed electrode contacted with the movable electrode in the sensitive direction one and two. However, the sensitive direction three does not contact all the time, indicating that the designed structure effectively improves the reverse anti-overload capability of the device.
- To sum up, the three sensitive directions of the designed device do not interfere with each other, and the threshold difference between different directions is greater than 29 g. The dynamic stability of the designed inertial switch is verified.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ren, C.; Wang, K.; Zhang, P.; Li, Y.; Zhao, Z.; Shi, X.; Zhang, H.; Tao, K.; Yang, Z. A Self-Powered MEMS Inertial Switch for Potential Zero Power-Consumption Wake-Up Ap plication. J. Microelectromech. Syst. Jt. IEEE ASME Publ. Microstruct. Microactuators Microsens. Microsyst. 2021, 30, 550–559. [Google Scholar]
- Xu, Q.; Wang, L.; Younis, M.I. Multi-Threshold Inertial Switch with Acceleration Direction Detection Capability. IEEE Trans. Ind. Electron. 2022, 70, 4226–4235. [Google Scholar] [CrossRef]
- Niyazi, A.; Xu, Q.; Khan, F.; Younis, M.I. Design, Modeling, and Testing of a Bidirectional Multi-Threshold MEMS Inertial Switch. Sens. Actuators A Phys. 2022, 334, 113219. [Google Scholar] [CrossRef]
- Field, R.V.; Epp, D.S. Development and calibration of a stochastic dynamics model for the design of a MEMS inertial switch. Sens. Actuators A Phys. 2007, 134, 109–118. [Google Scholar] [CrossRef]
- Xu, Q.; Younis, M.I. Micromachined threshold inertial switches: A review. J. Micromech. Microeng. 2022, 32, 063001. [Google Scholar] [CrossRef]
- Liu, M.; Zhu, Y.; Wang, C.; Chen, Y.; Wu, Y.; Zhang, H.; Du, Y.; Wang, W. A Novel Low-g MEMS Bistable Inertial Switch With Self-Locking and Reverse-Unlocking Functions. J. Microelectromech. Syst. 2020, 29, 1493–1503. [Google Scholar] [CrossRef]
- Xu, Q.; Khan, F.; Younis, M.I. Multi-Threshold Inertial Switch for Quantitative Acceleration Measurements. IEEE Sens. J. 2021, 21, 23849–23859. [Google Scholar] [CrossRef]
- You, R.; Lu, W.; Ruan, Y.; Hao, Y. Micromachined inertial switch for sub-g monitoring using gravity-based threshold compensation. Electron. Lett. 2020, 57, 22–24. [Google Scholar] [CrossRef]
- Raeisifard, H.; Bahrami, M.N.; Yousefi-Koma, A. Mechanical characterization and nonlinear analysis of a piezoelectric laminated micro-switch under electrostatic actuation. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2013, 229, 299–308. [Google Scholar] [CrossRef]
- Bahrami, M.N.; Yousefi-Koma, A.; Raeisifard, H. Modeling and nonlinear analysis of a micro-switch under electrostatic and piezoelectric excitations with curvature and piezoelectric nonlinearities. J. Mech. Sci. Technol. 2014, 28, 263–272. [Google Scholar] [CrossRef]
- Chen, W.; Wang, Y.; Ding, G.; Wang, H.; Zhao, X.; Yang, Z. Simulation, fabrication and characterization of an all-metal contact-enhanced triaxial inertial microswitch with low axial disturbance. Sens. Actuators A Phys. 2014, 220, 194–203. [Google Scholar] [CrossRef]
- Zhang, X.; Shi, J.; Zhu, X.; Wang, Y.; Chen, J.; Ding, G.; Yang, Z. Heterogeneous Integrated MEMS Inertial Switch with Electrostatic Locking and Compliant Cantilever Stationary Electrode for Holding Stable ‘on’-State. In Proceedings of the 2019 IEEE 32nd International Conference on Micro Electro Mechanical Systems (MEMS), Seoul, Republic of Korea, 27–31 January 2019. [Google Scholar]
- Xu, Q.; Yang, Z.; Sun, Y.; Lai, L.; Jin, Z.; Ding, G.; Zhao, X.; Yao, J.; Wang, J. Shock-Resistibility of MEMS-Based Inertial Microswitch under Reverse Directional Ultra-High g Acceleration for IoT Applications. Sci. Rep. 2017, 7, 45512. [Google Scholar] [CrossRef] [PubMed]
- Kuo, J.C.; Kuo, P.H.; Lai, Y.T.; Ma, C.W.; Lu, S.S.; Yang, Y.J. A Passive Inertial Switch Using MWCNT–Hydrogel Composite with Wireless Interrogation Capability. J. Microelectromech. Syst. 2013, 22, 646–654. [Google Scholar] [CrossRef]
- Yang, Z.; Zhu, B.; Chen, W.; Ding, G.; Wang, H.; Zhao, X. Fabrication and characterization of a multidirectional-sensitive contact-enhanced inertial microswitch with a electrophoretic flexible composite fixed electrode. J. Micromech. Microeng. 2012, 22, 045006. [Google Scholar] [CrossRef]
- Tang, J.; Wang, H.; Liu, R.; Li, X.; Zhang, Z.; Yao, J.; Ding, G. A directly strain measuring method for electroplated nickel micro-tensile test. Microsyst. Technol. 2010, 16, 1839–1844. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Movable Electrode | Fixed Beam | Gap | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Parameters | T | d | L | t2 | t | t1 | g | g1 | H | h |
| Values (μm) | 100 | 25 | 800 | 15 | 20 | 10 | 25 | 20 | 120 | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Wang, R.; Wang, H.; Yang, Z. Design, Simulation, and Fabrication of a New Three-Axis Inertial Switch with a Triangular Movable Electrode Structure. Micromachines 2023, 14, 94. https://doi.org/10.3390/mi14010094
Chen W, Wang R, Wang H, Yang Z. Design, Simulation, and Fabrication of a New Three-Axis Inertial Switch with a Triangular Movable Electrode Structure. Micromachines. 2023; 14(1):94. https://doi.org/10.3390/mi14010094
Chicago/Turabian StyleChen, Wenguo, Rui Wang, Huiying Wang, and Zhen Yang. 2023. "Design, Simulation, and Fabrication of a New Three-Axis Inertial Switch with a Triangular Movable Electrode Structure" Micromachines 14, no. 1: 94. https://doi.org/10.3390/mi14010094
APA StyleChen, W., Wang, R., Wang, H., & Yang, Z. (2023). Design, Simulation, and Fabrication of a New Three-Axis Inertial Switch with a Triangular Movable Electrode Structure. Micromachines, 14(1), 94. https://doi.org/10.3390/mi14010094