



Research on Fast and Precise Positioning Strategy of an Ultrasonic Motor Based on the Ultrasonic Friction Reduction Theory


Abstract
:1. Introduction
2. Characteristics of TPSPM
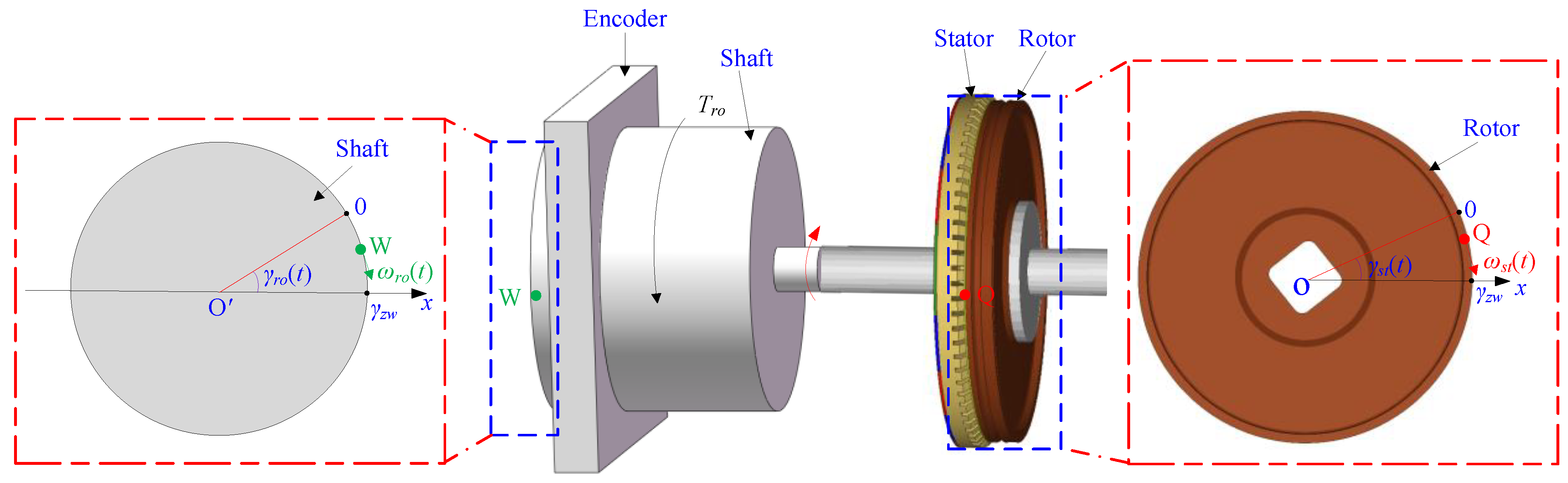
2.1. Assembly Structure System of the Motor and Definition of Particles
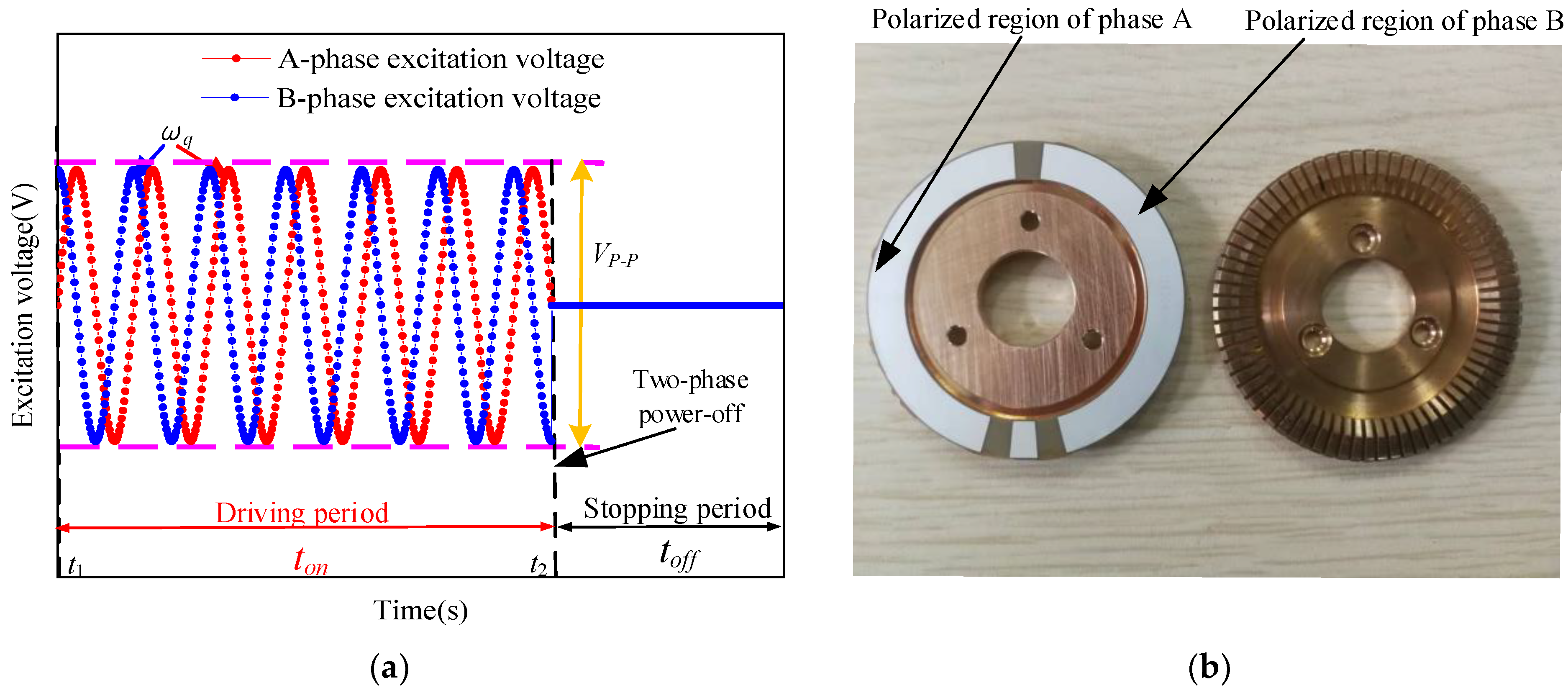
2.2. Introduction to TPSPM
2.3. Analysis of the Driving Mechanism of the TPSPM
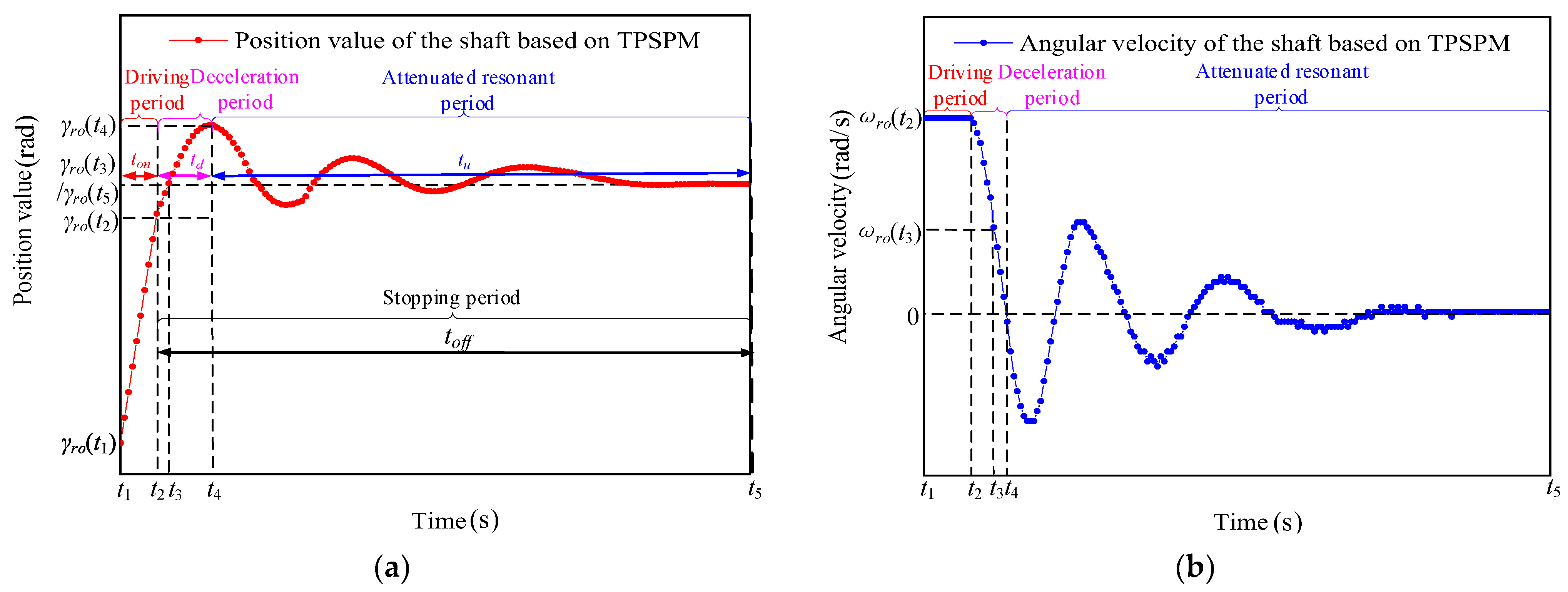
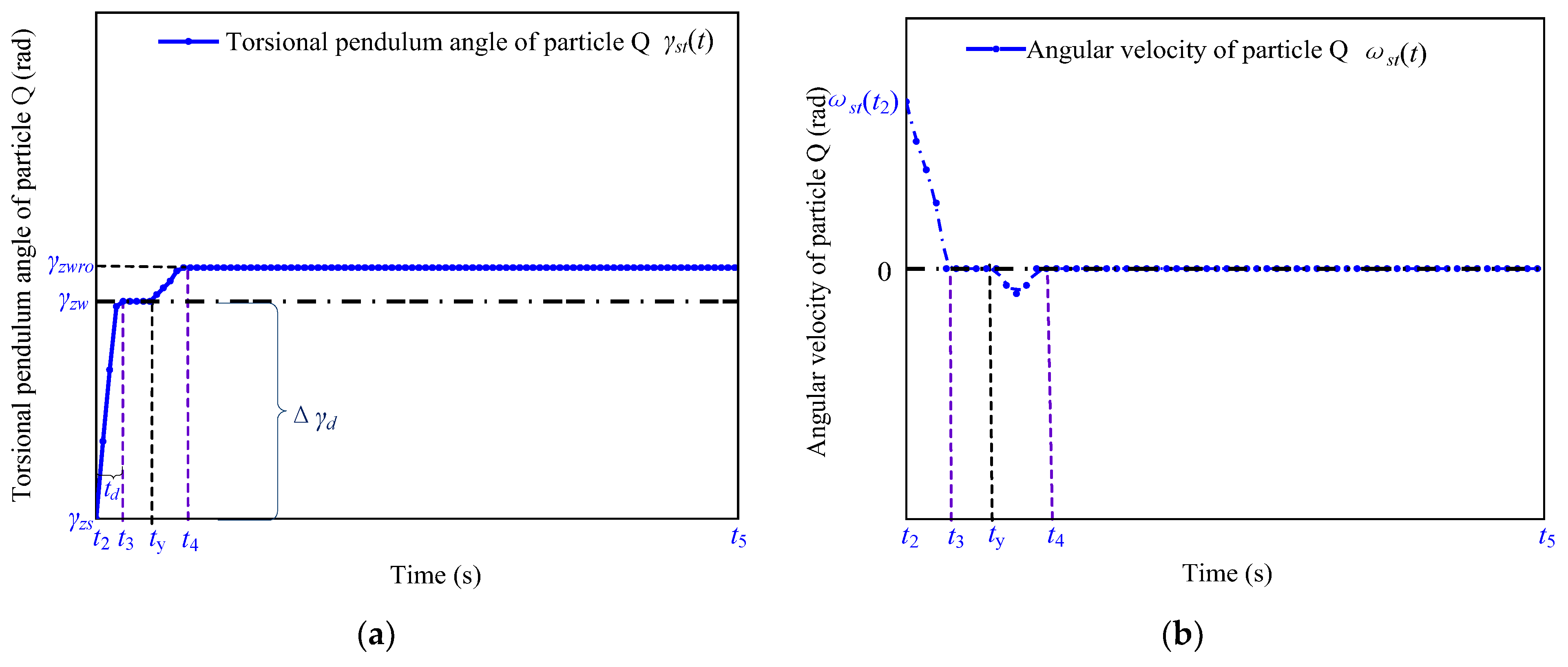
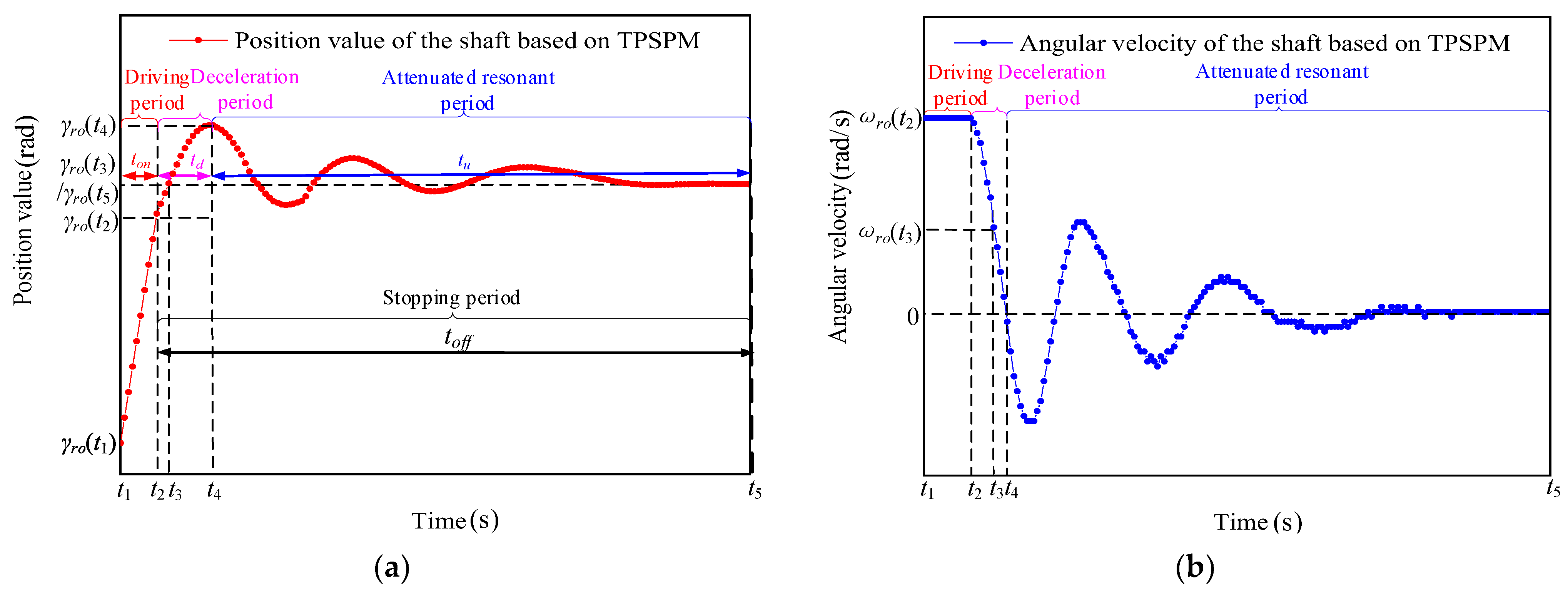
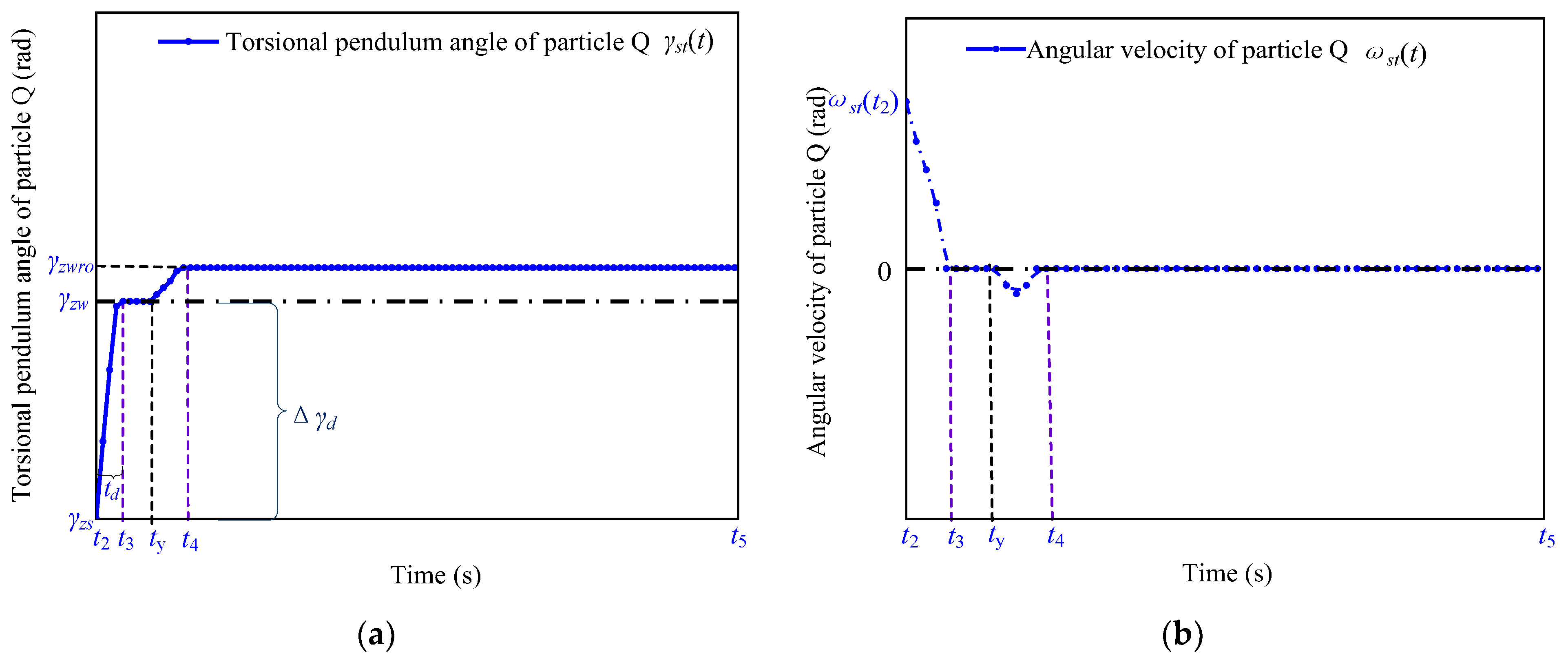
2.4. Motion Characteristics of the Particle in the Stopping Period
2.4.1. Analysis of the Driving Mechanism of the Deceleration Section
- 1.
- Dynamic analysis of < ;
- 2.
- Dynamic analysis of ;
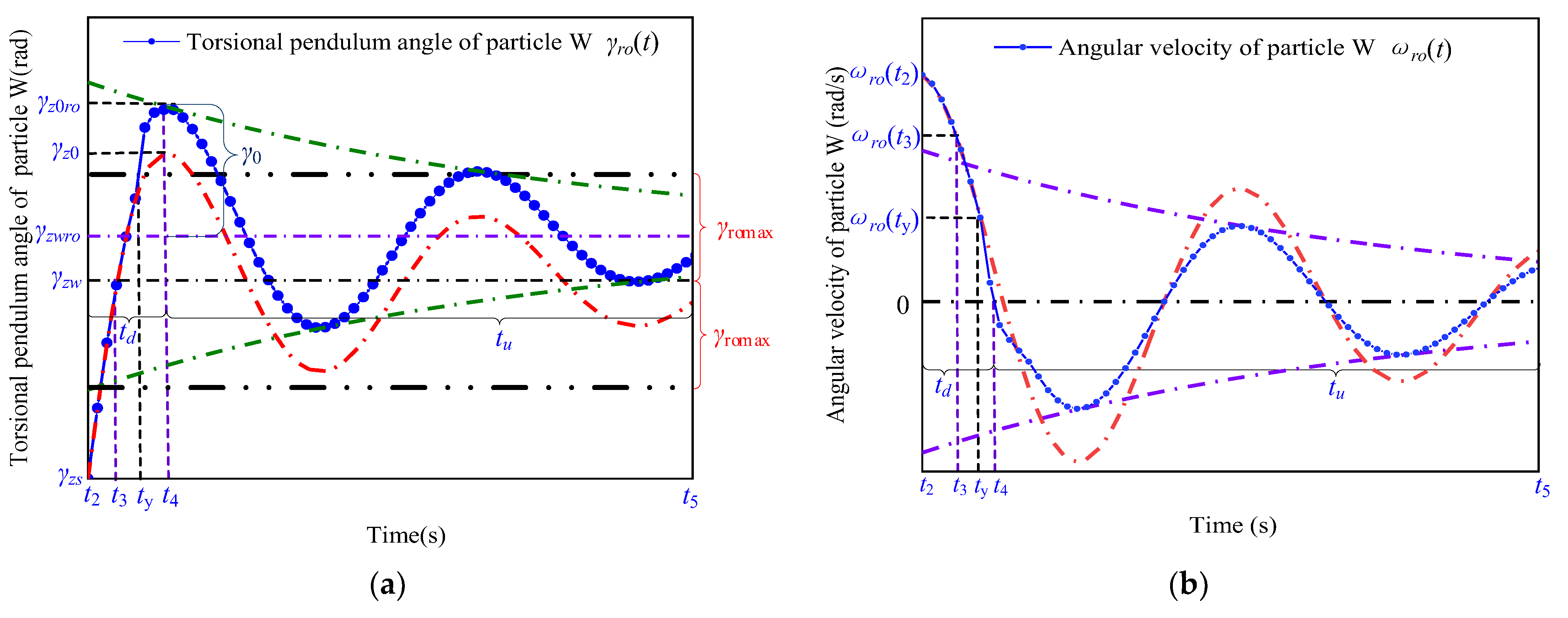
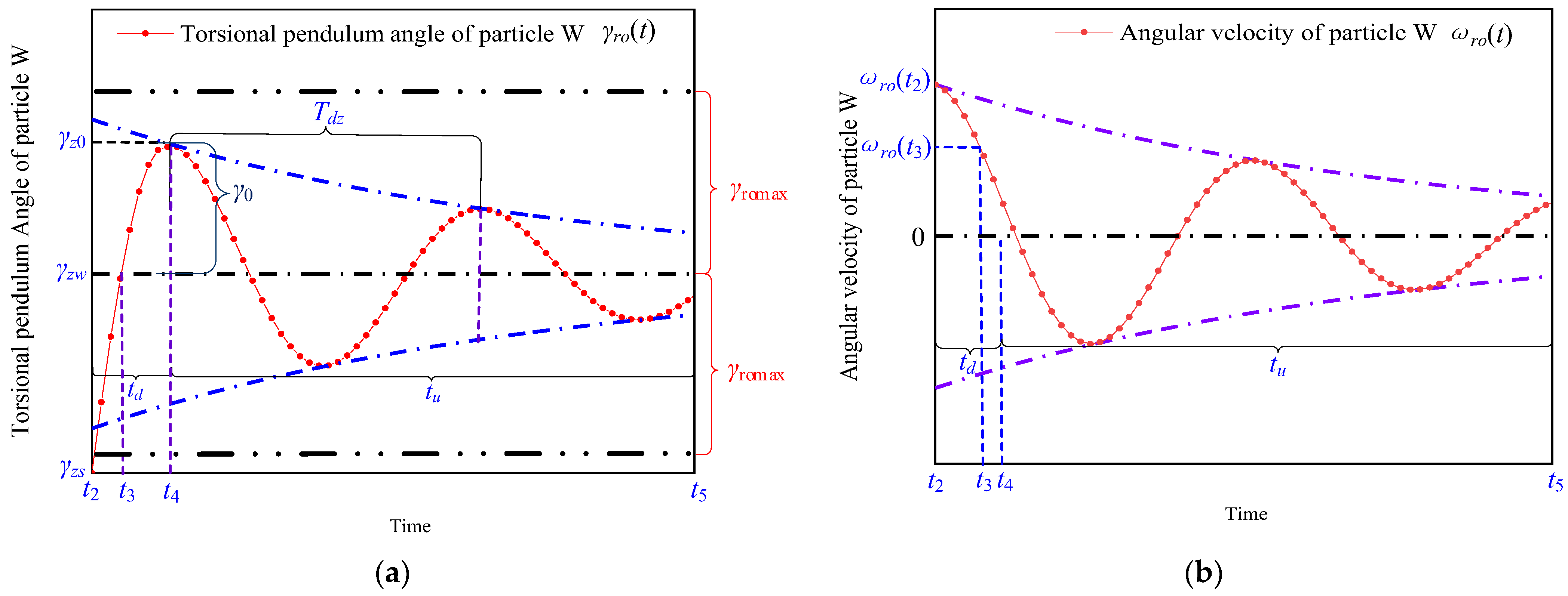
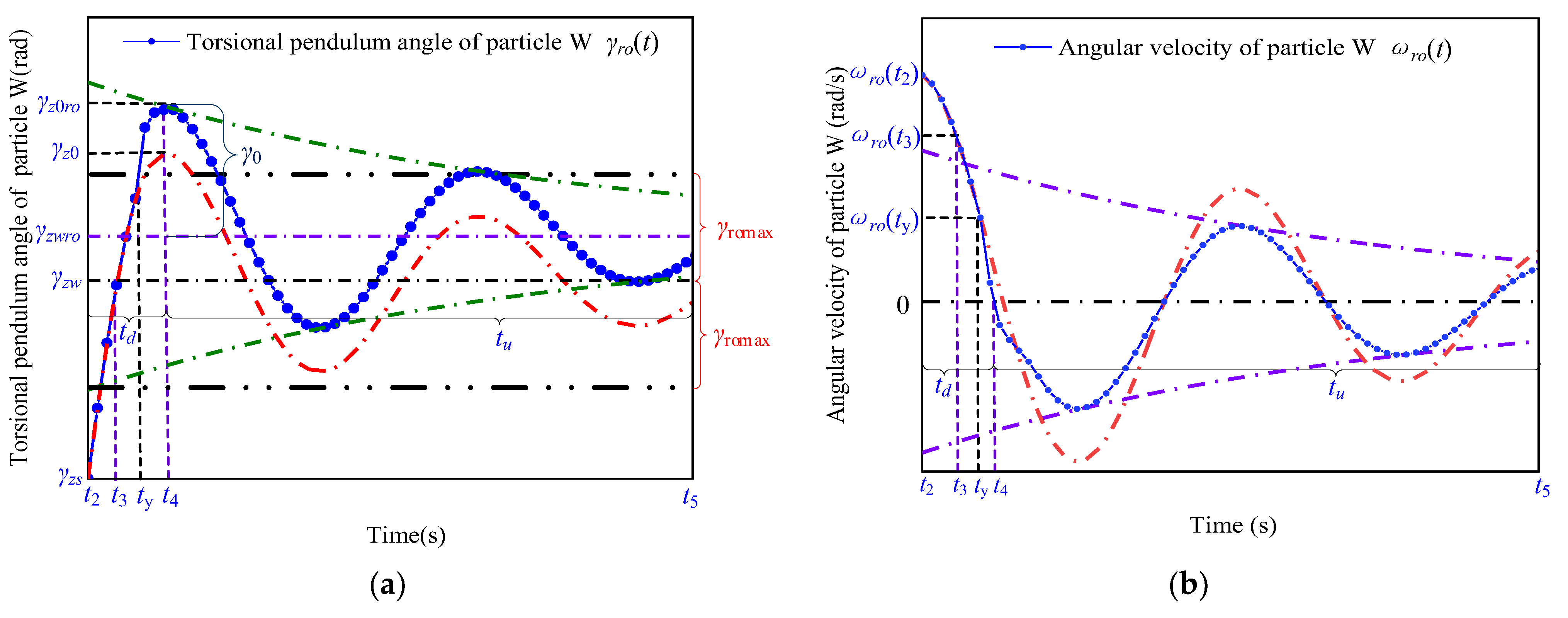
2.4.2. Analysis of the Driving Mechanism of the Attenuated Resonant Period
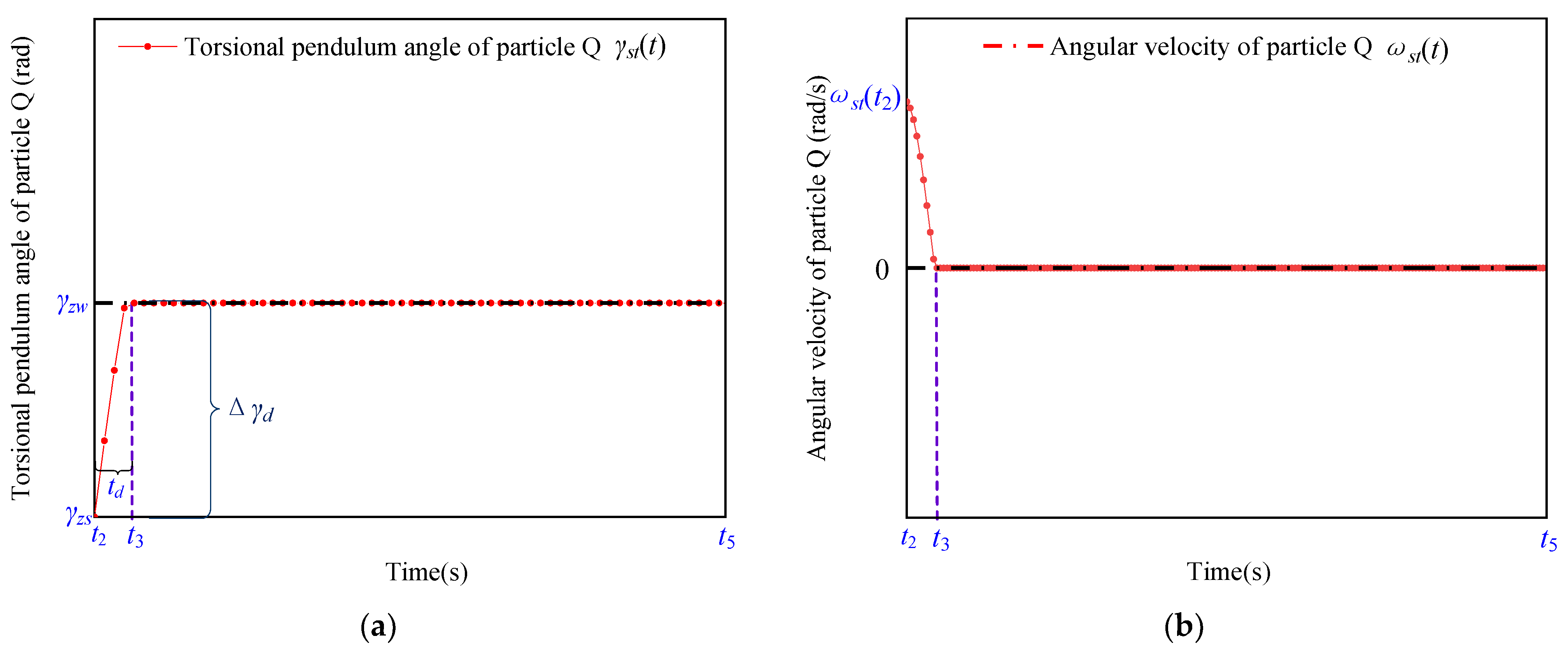
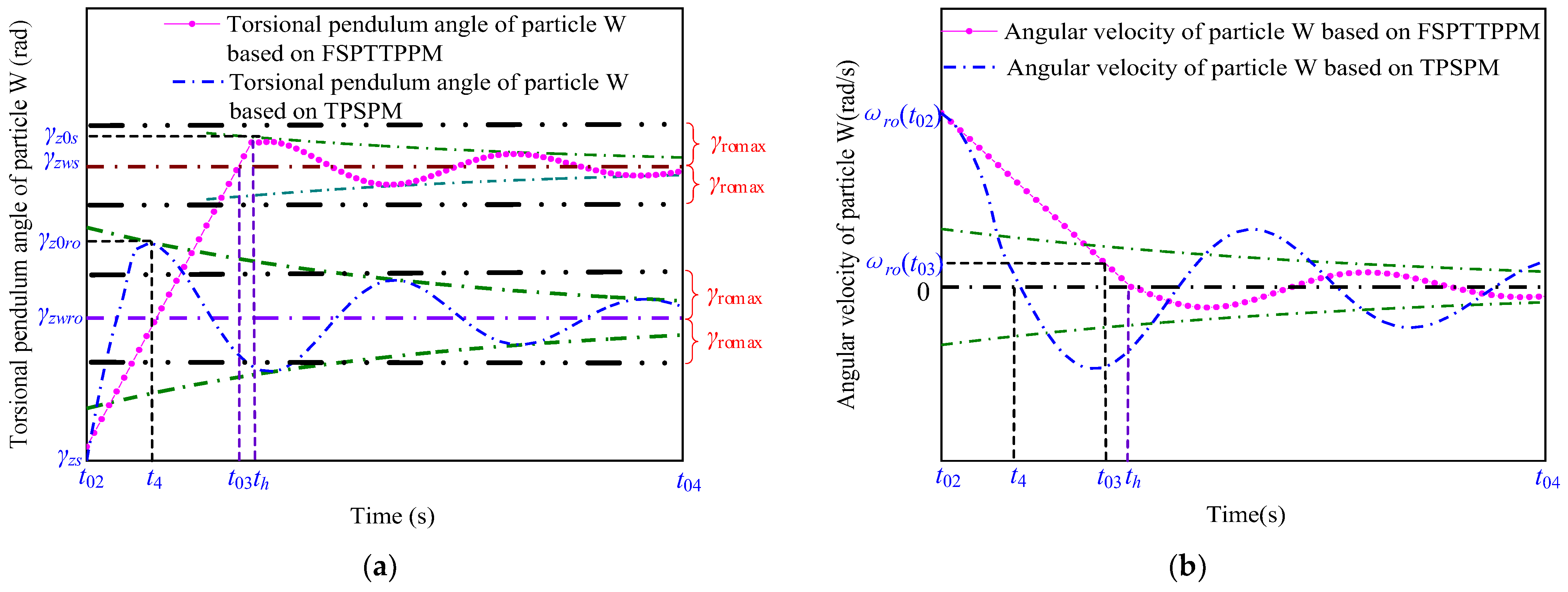
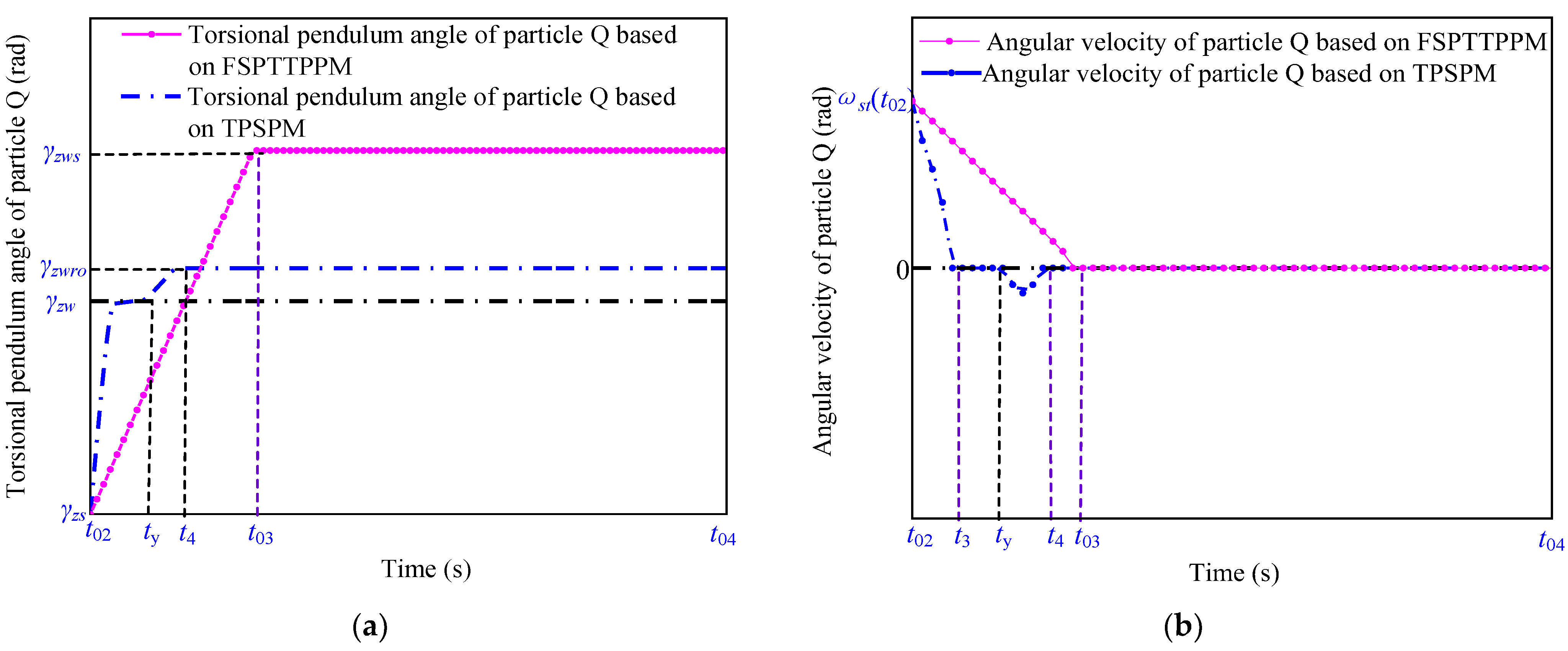
2.5. Analysis of the Twist Angle of the Rotor
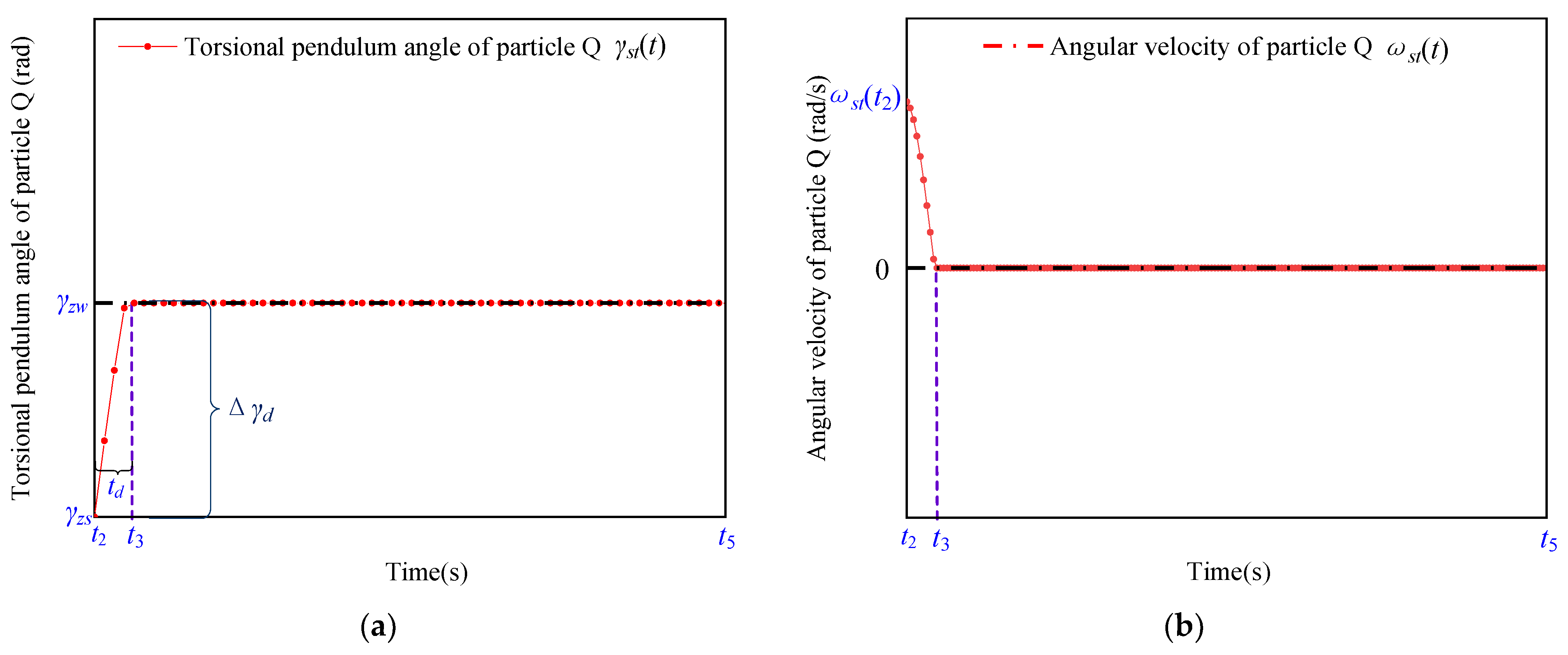
2.5.1. Torsional Angle Analysis When the Torque of the Shaft Is Not Greater than
2.5.2. Dynamic Analysis When the Torque of the Shaft Is Greater than
3. Introduction to FSPTTPPM and Analysis of Its Driving Mechanism
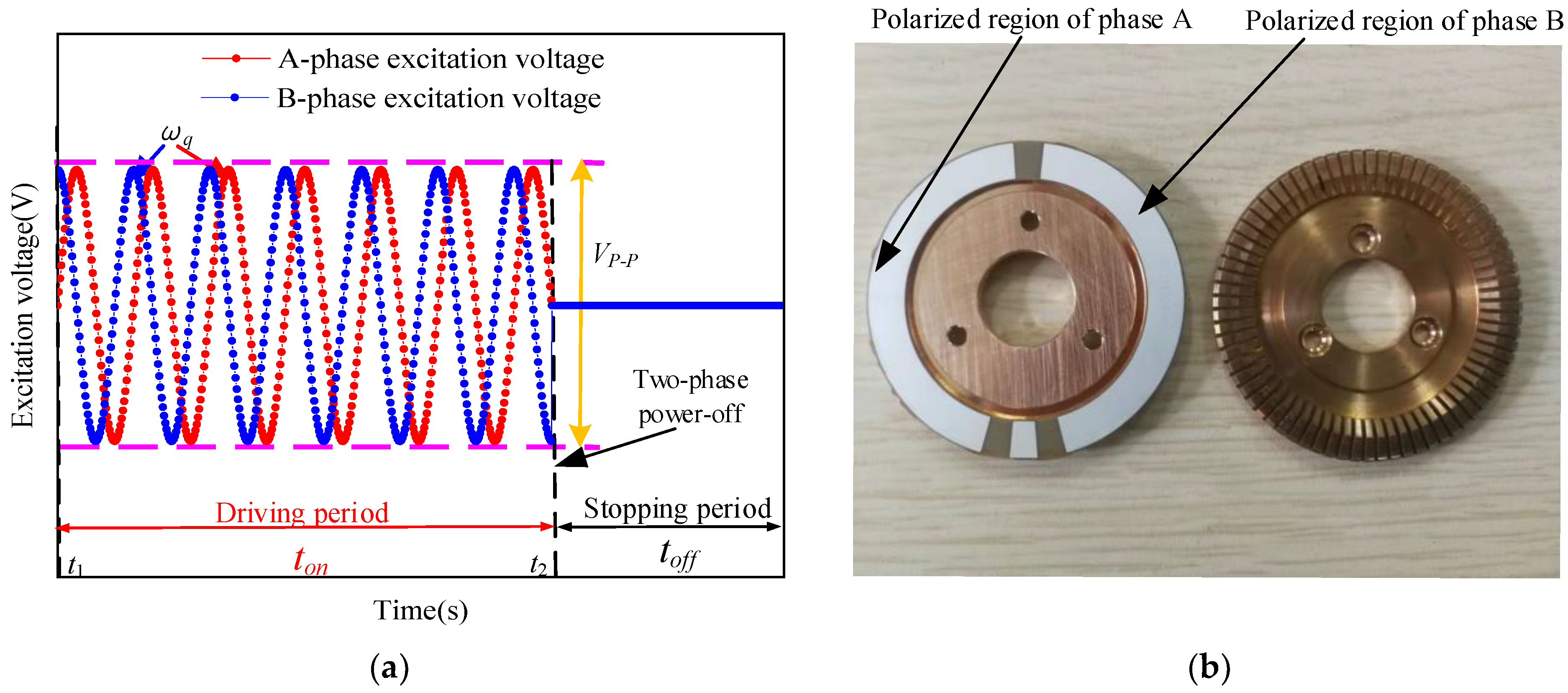
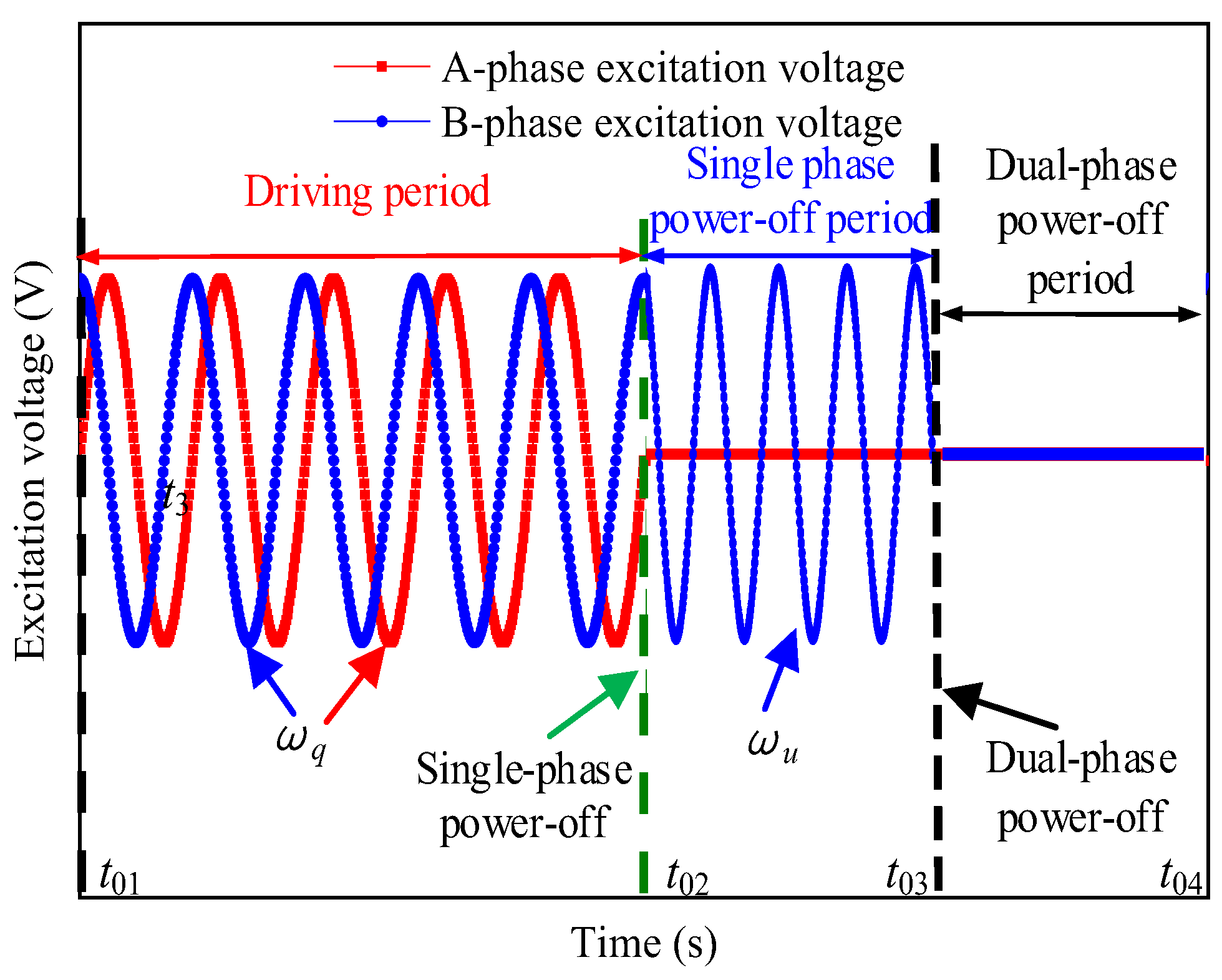
3.1. Introduction to the FSPTTPPM Driving Method
3.2. Principal Analysis of the FSPTTPPM
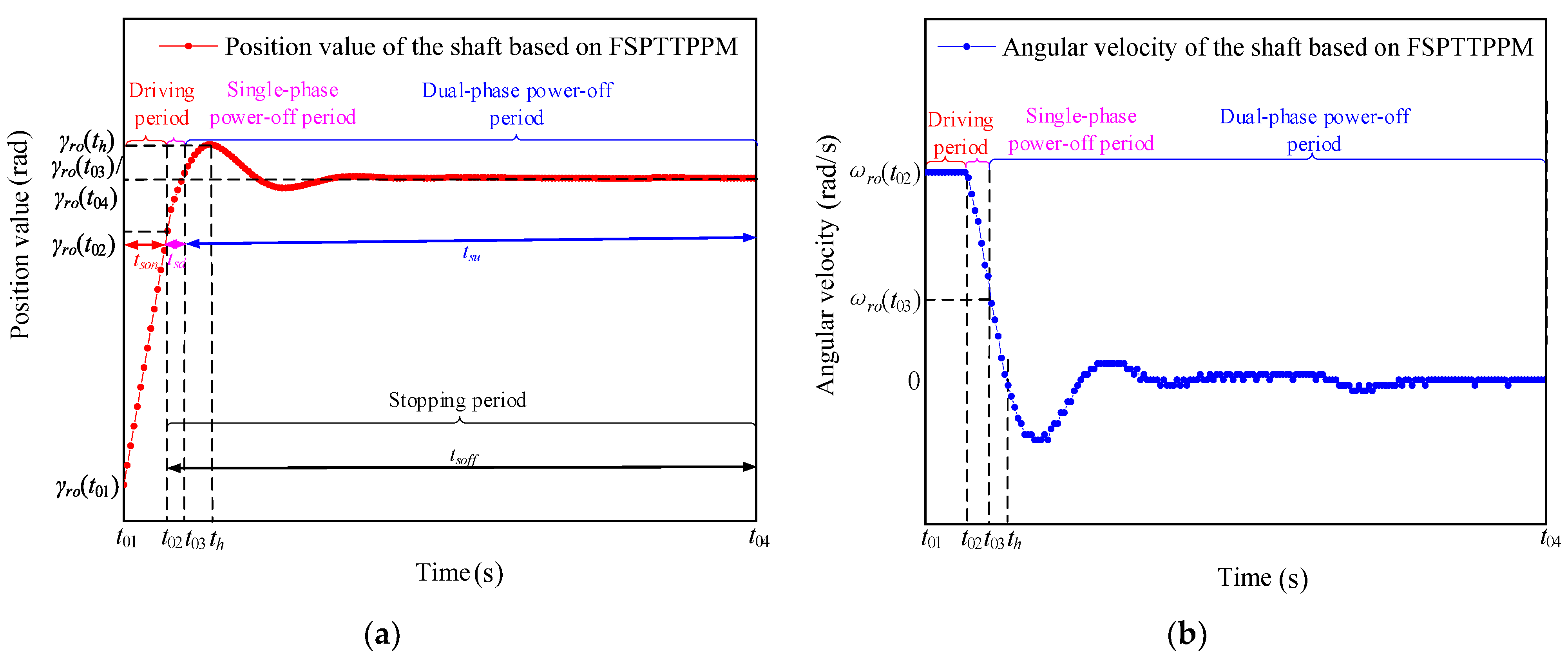
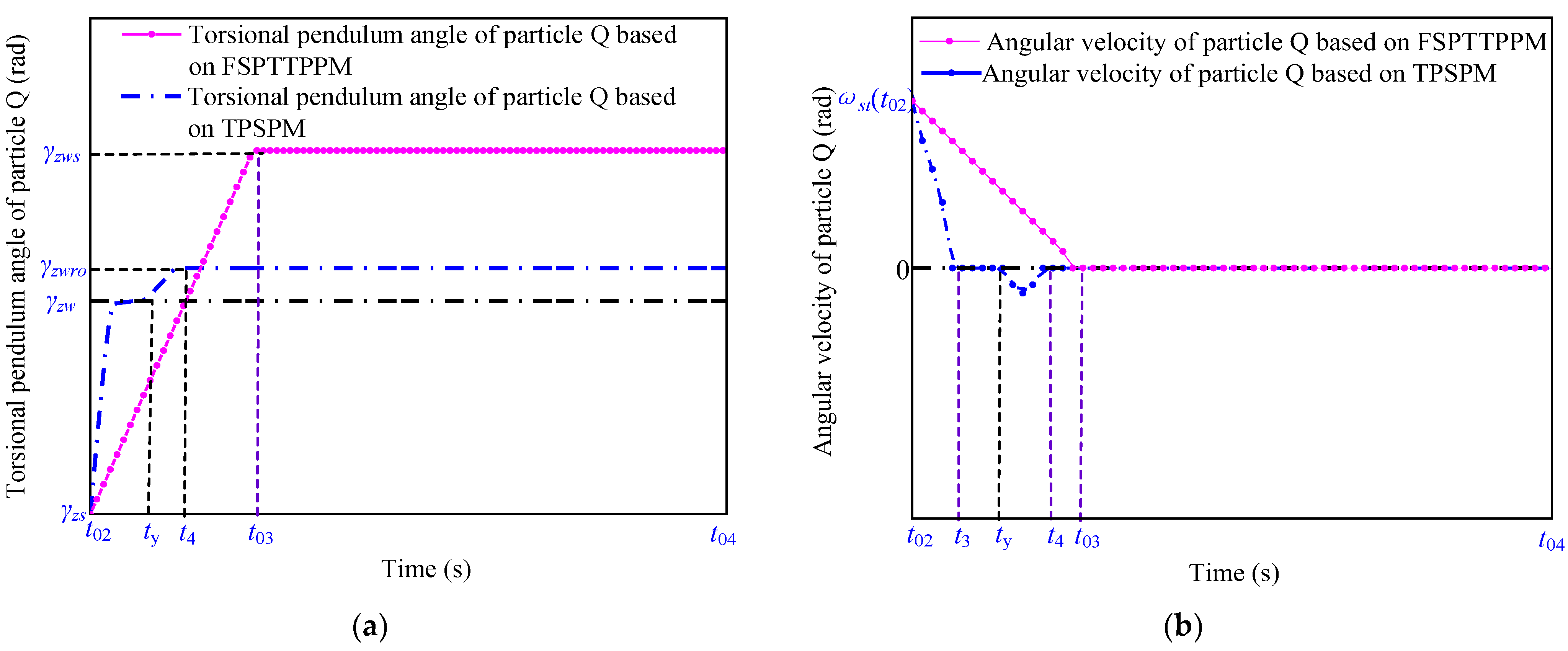
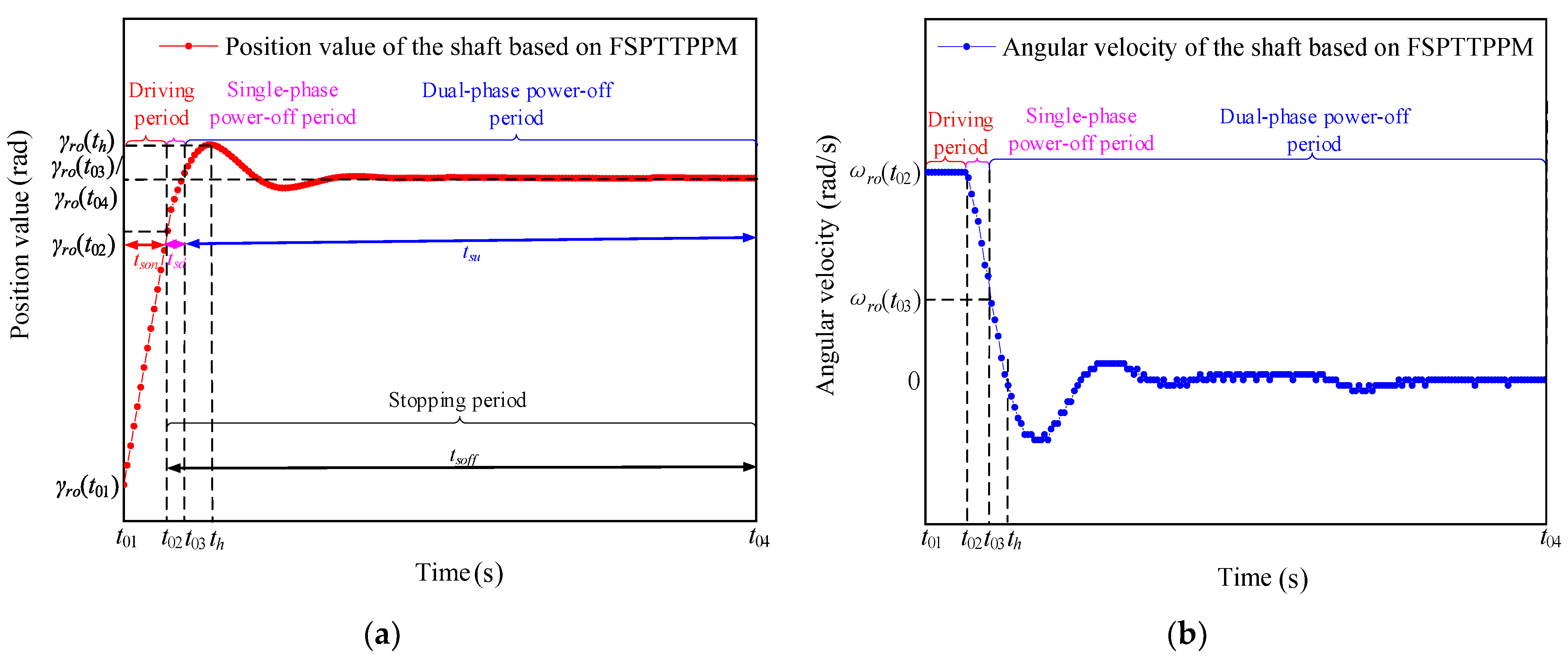
3.3. Motion Characteristics of the Shaft
3.4. Parameter Setting and Analysis of the Theoretical Equations
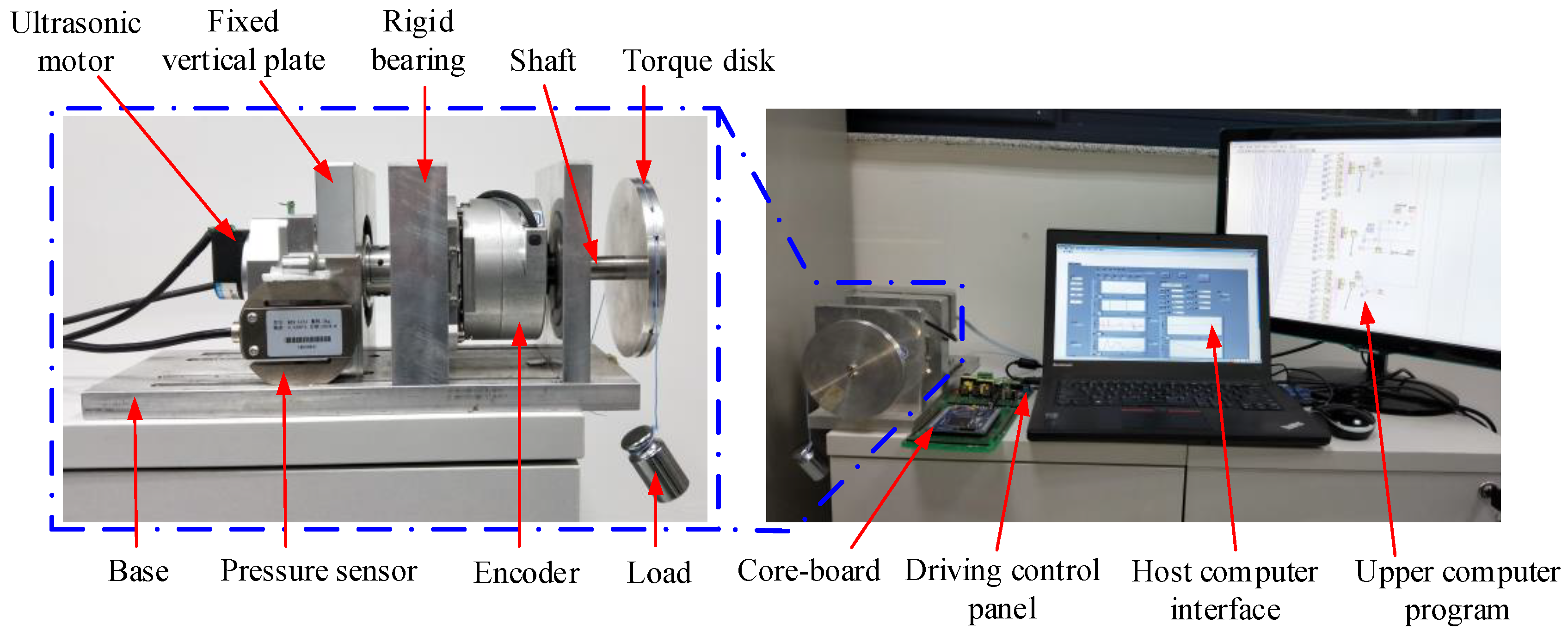
4. Construction of the Test Platform
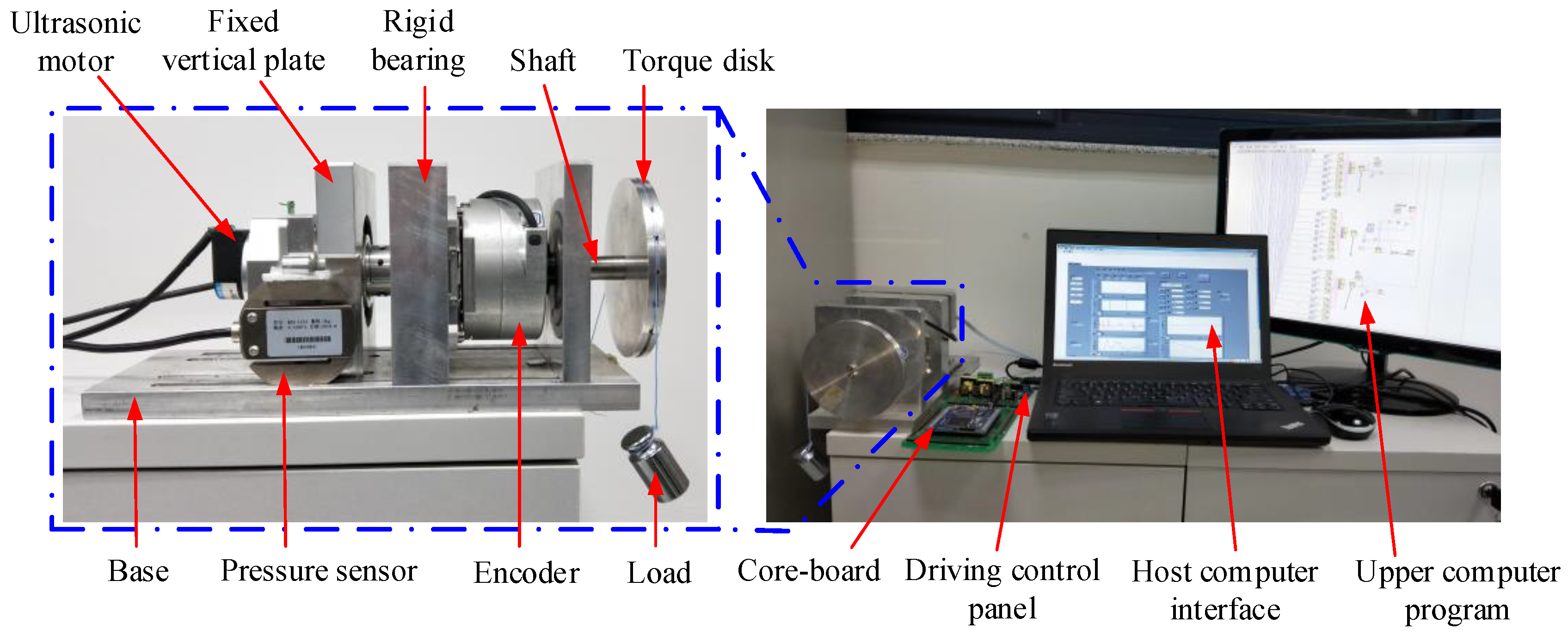
4.1. Introduction to the Test Platform
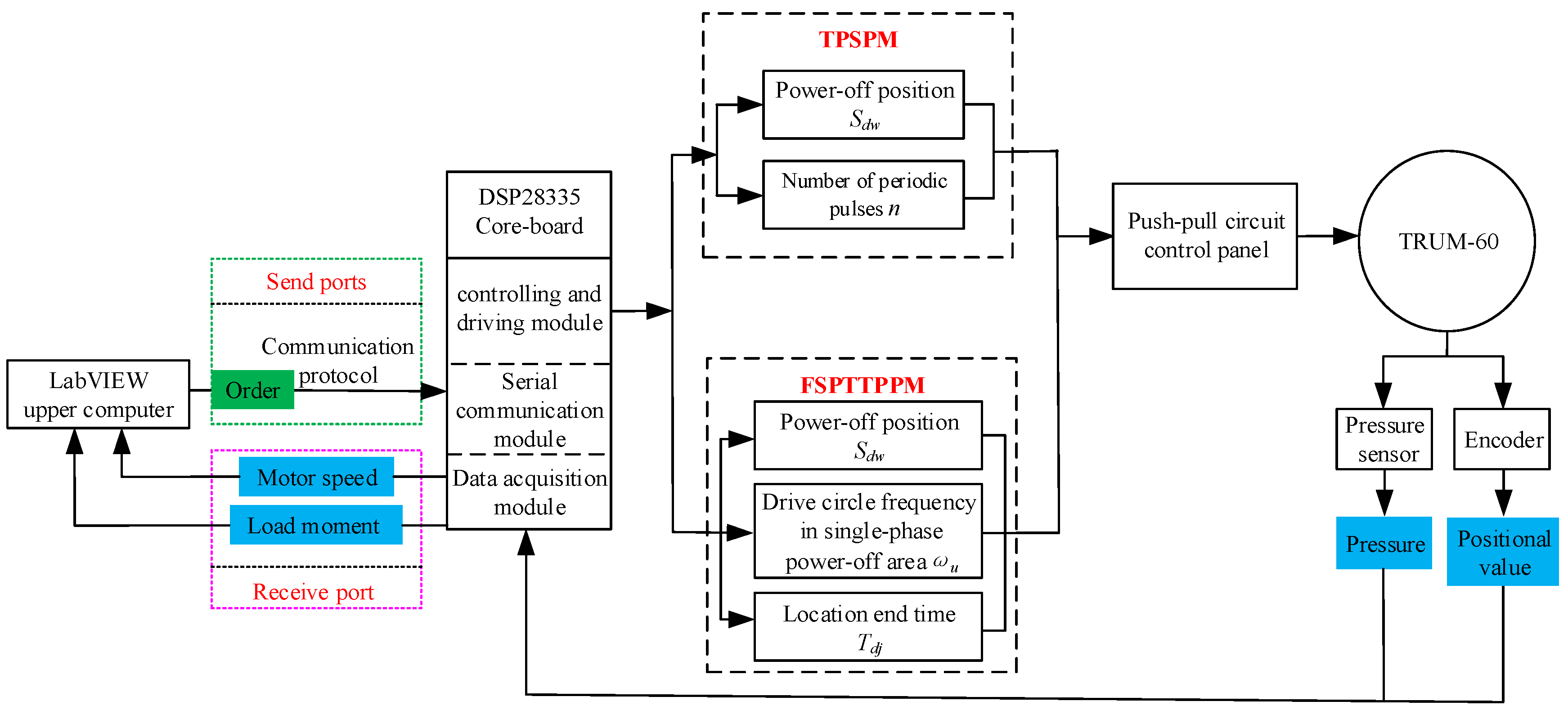
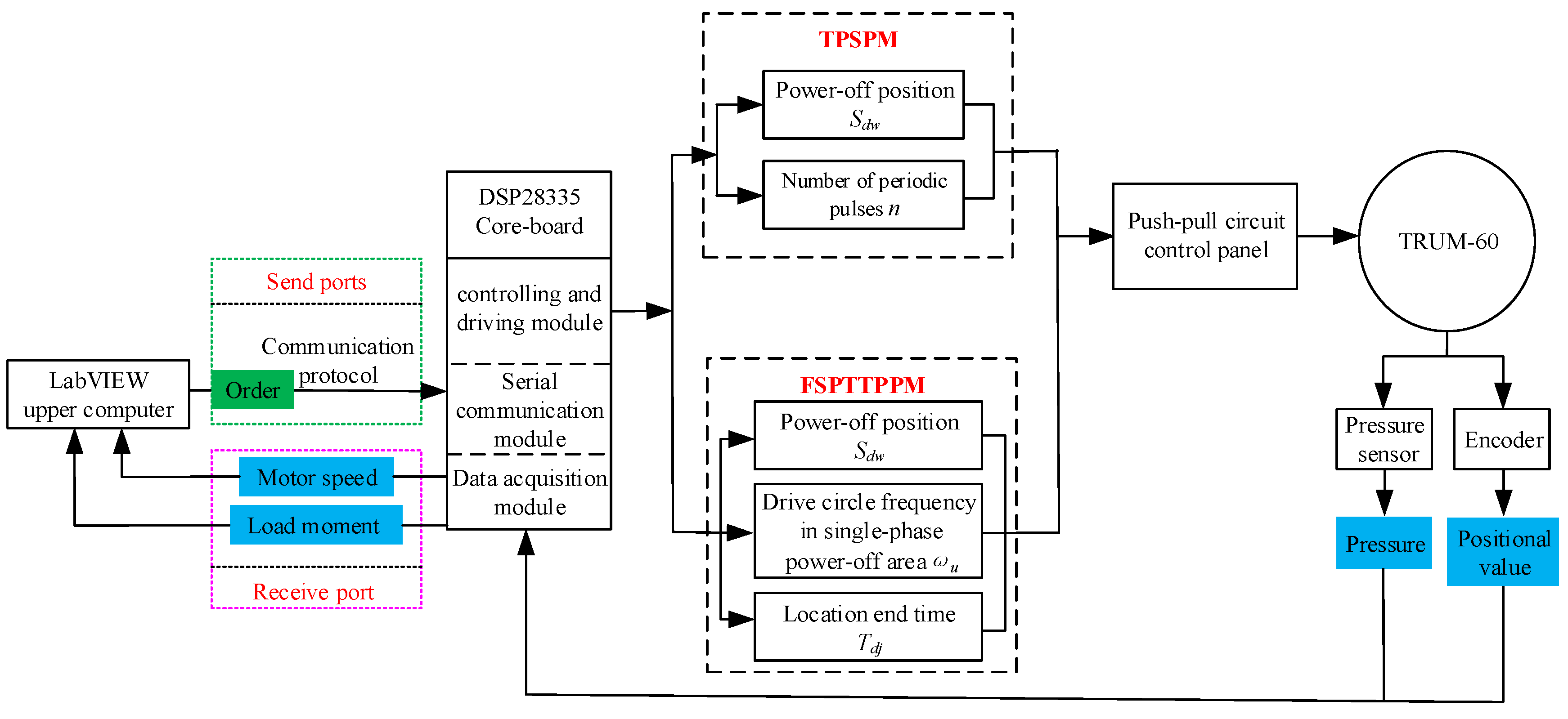
4.2. Framework of the Test System
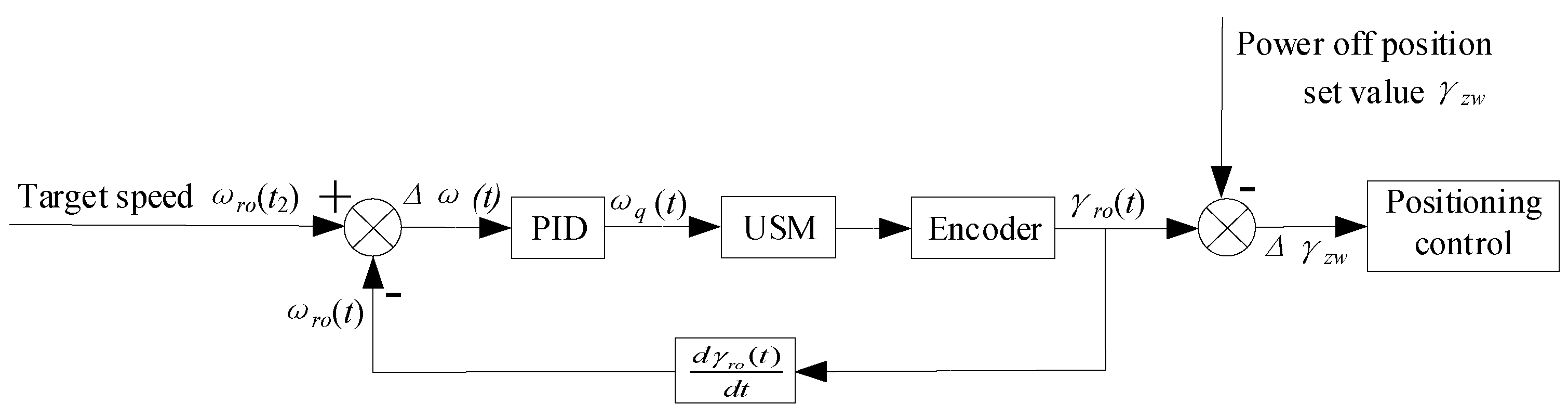
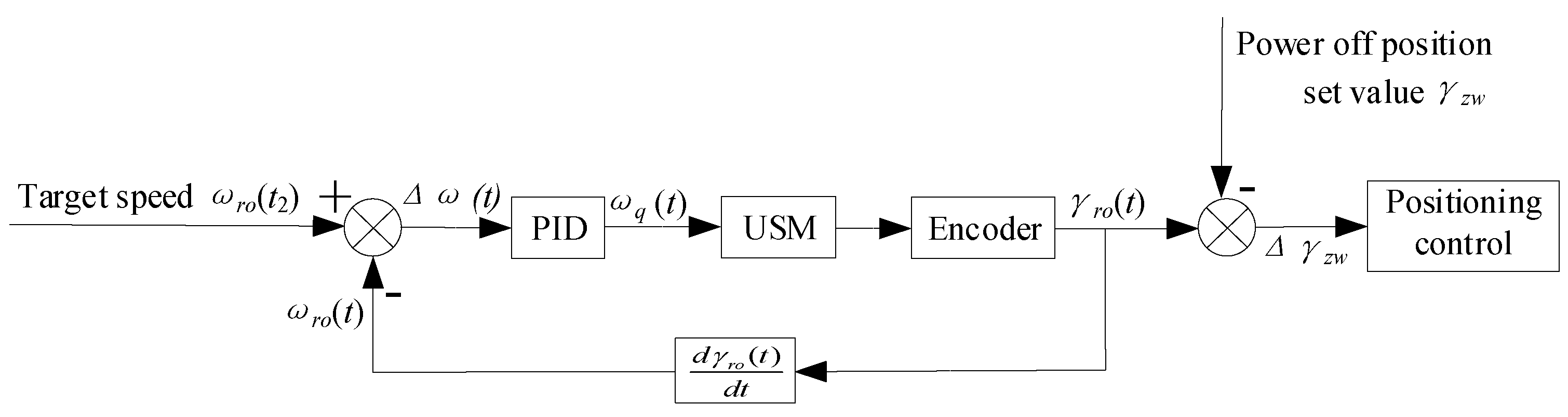
4.3. Structure of the Control System in the Test System
4.4. Experiments and Analysis
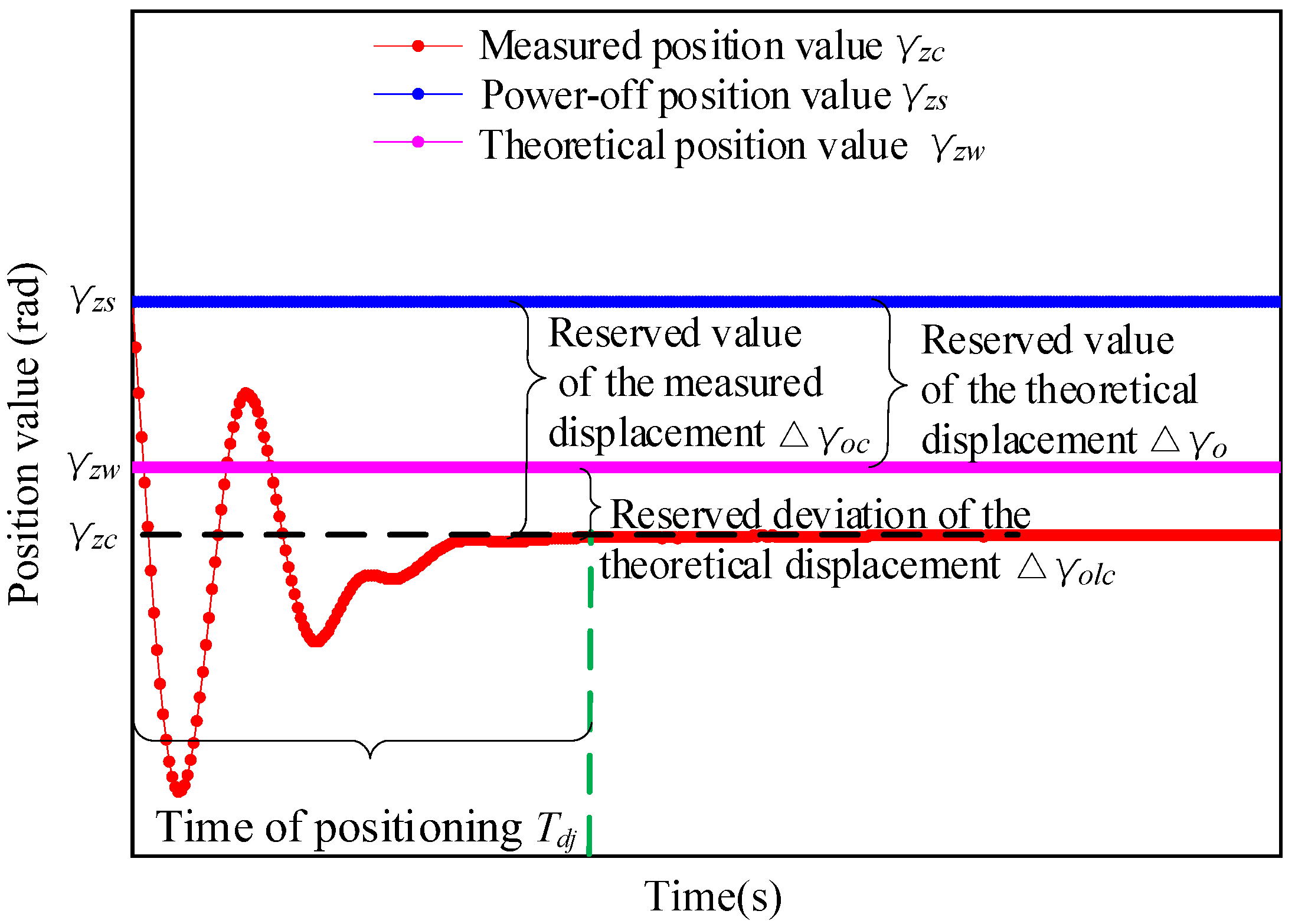
4.4.1. Definition of the Power-Off Reservation Value
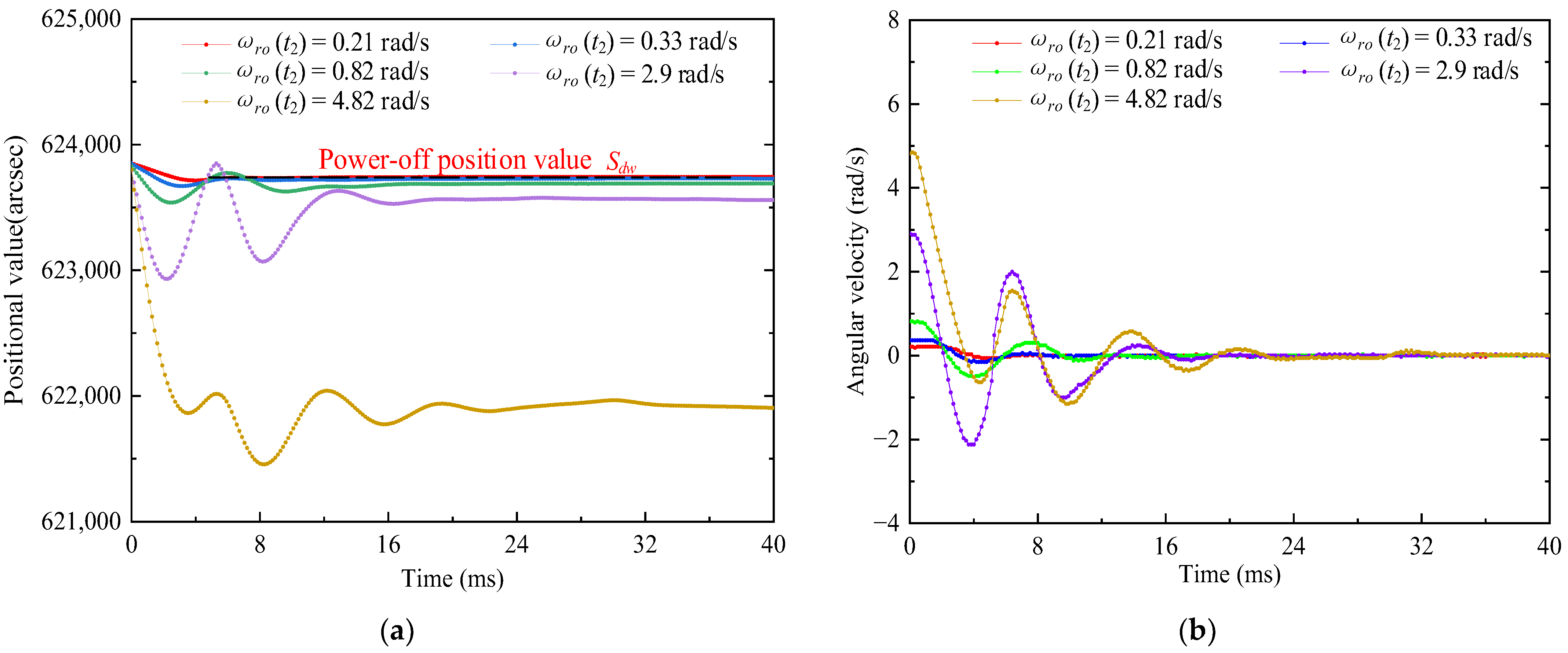
4.4.2. Experimental Test and Analysis of the Positioning Method Based on TPSPM
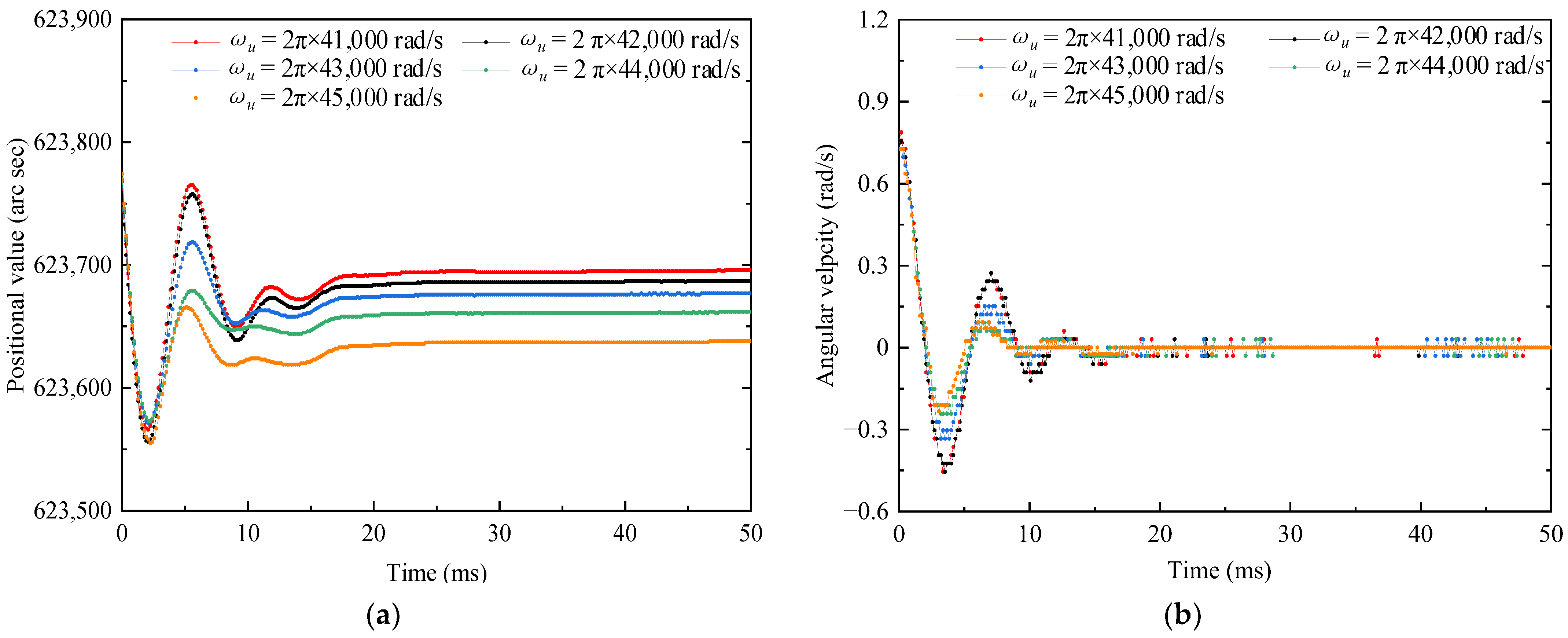
4.4.3. Setting Experiment of the Driving Circle Frequency during
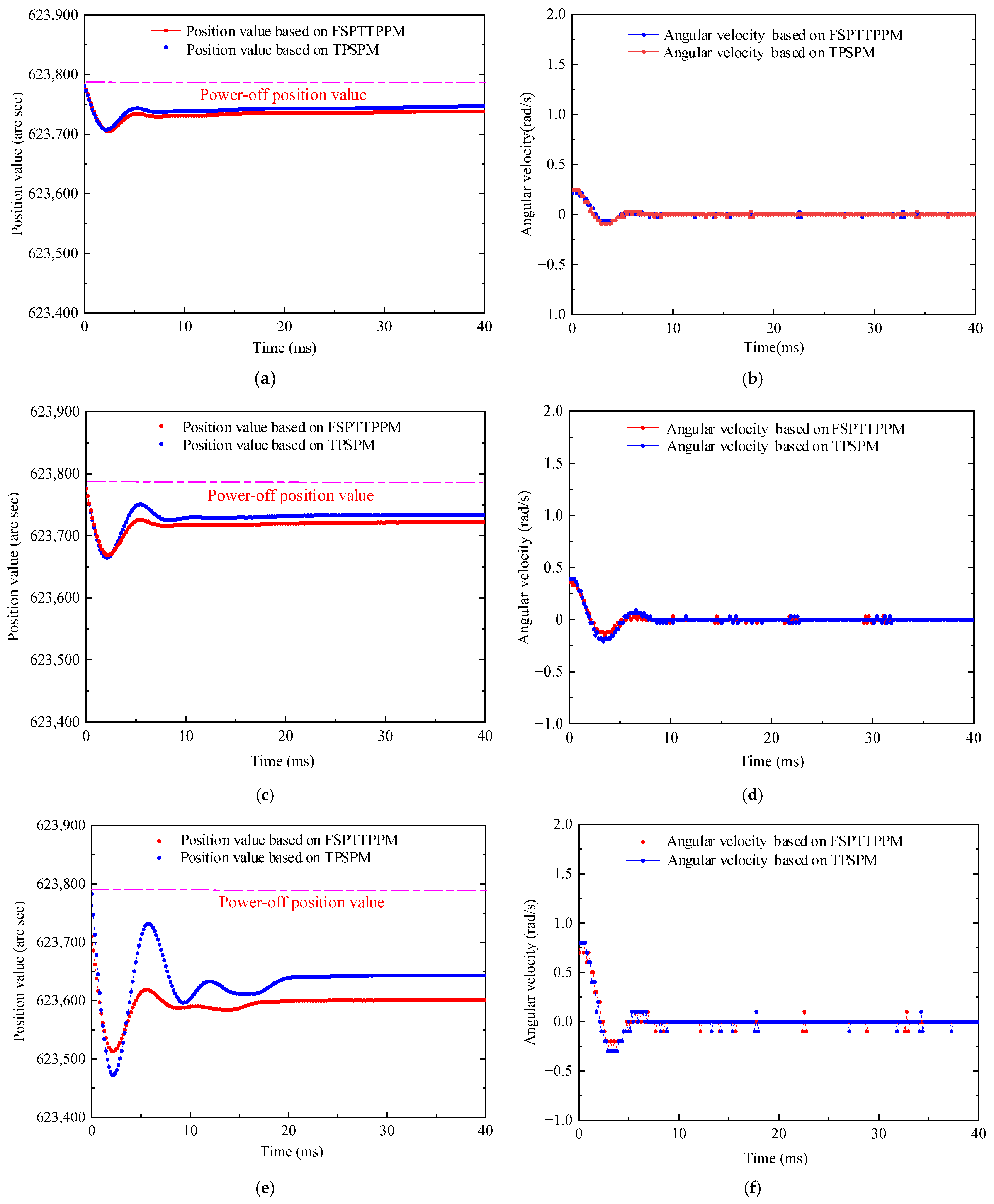
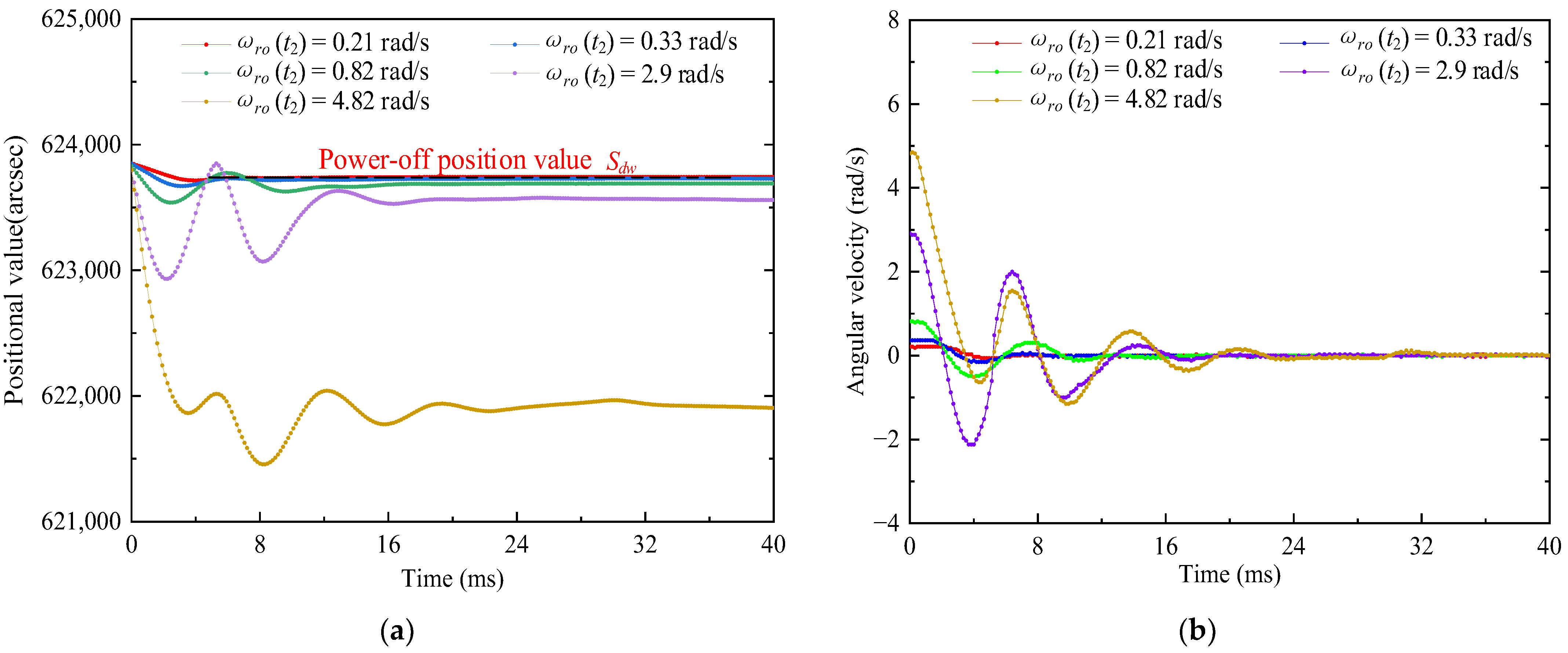
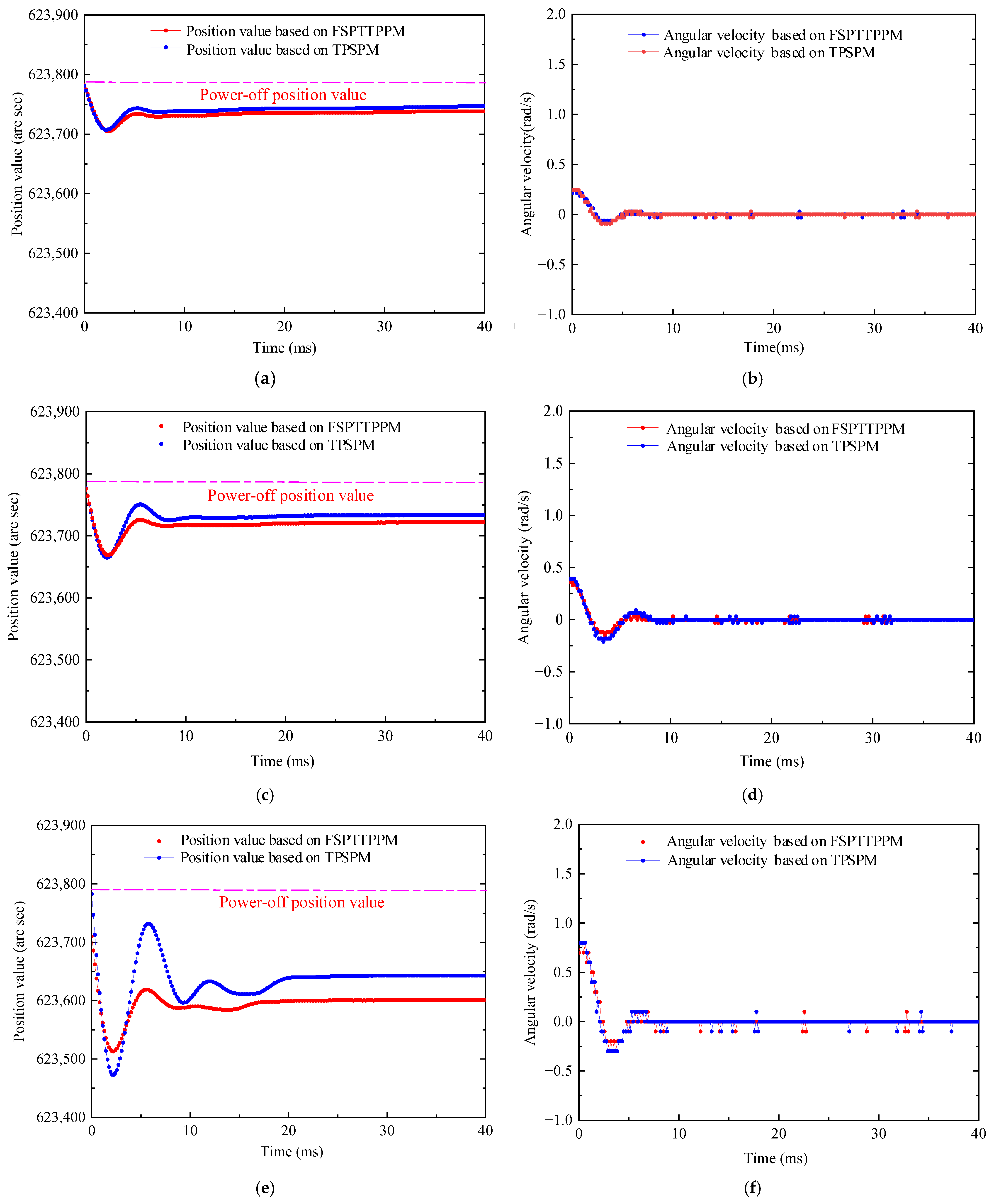
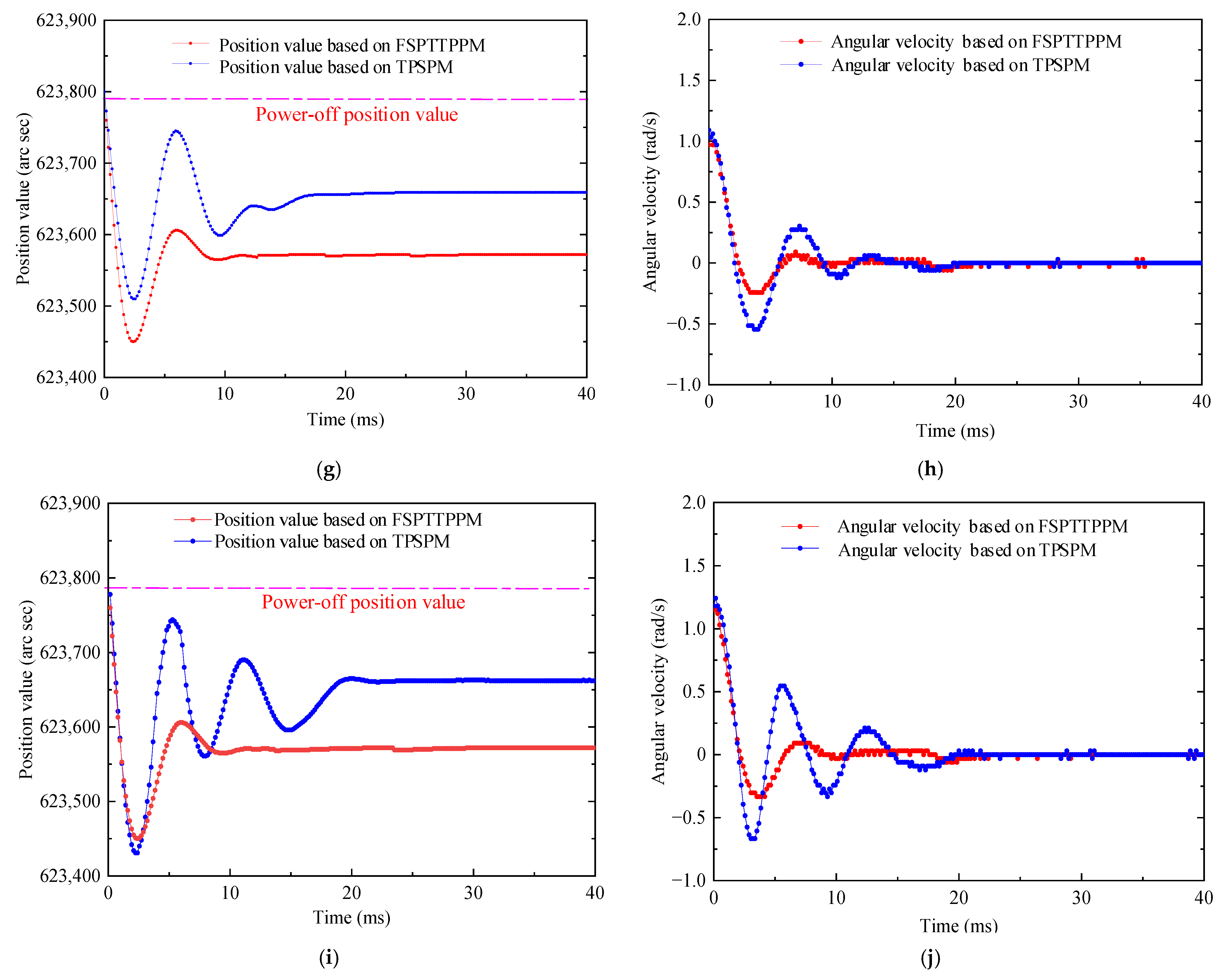
4.4.4. Experiments Employing the Two Positioning Strategies
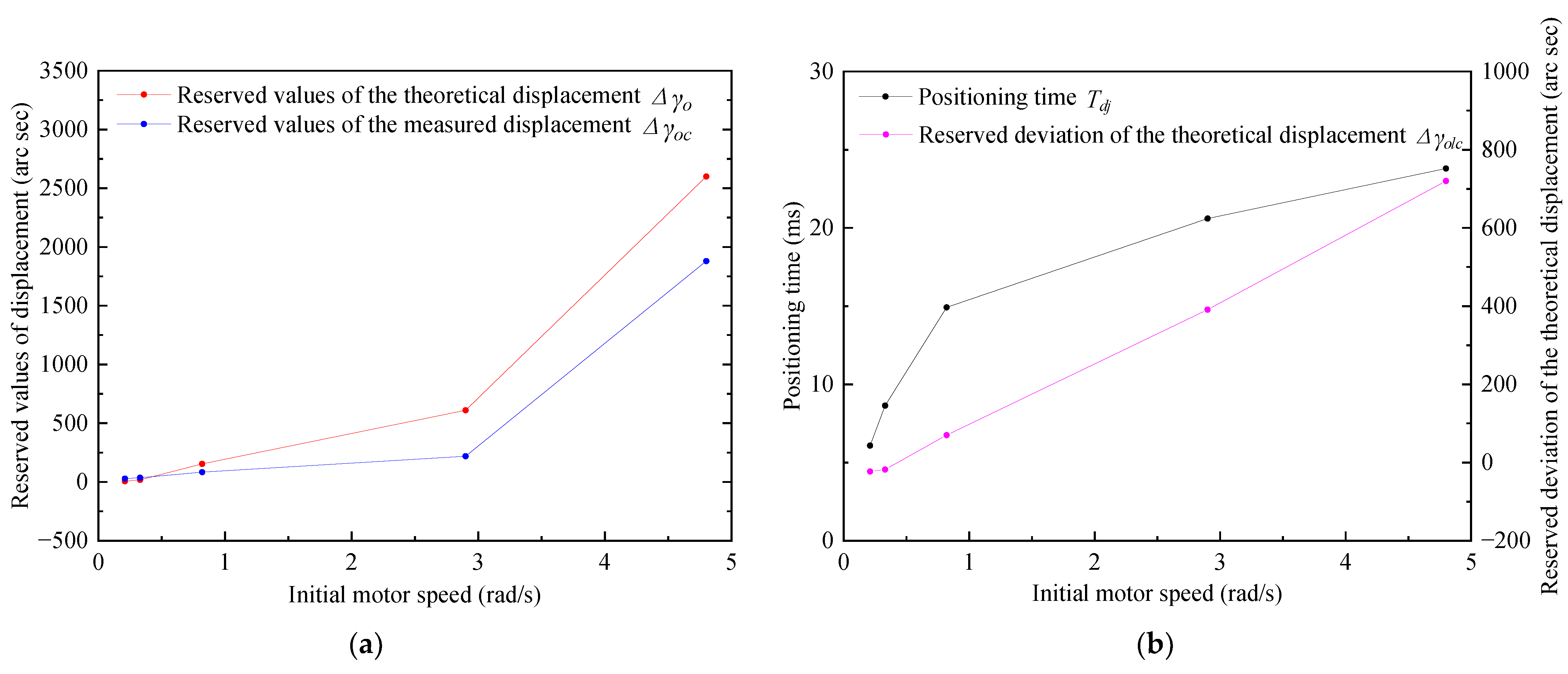
4.4.5. Conclusions from the Experimental Measurements Using the Two Positioning Strategies
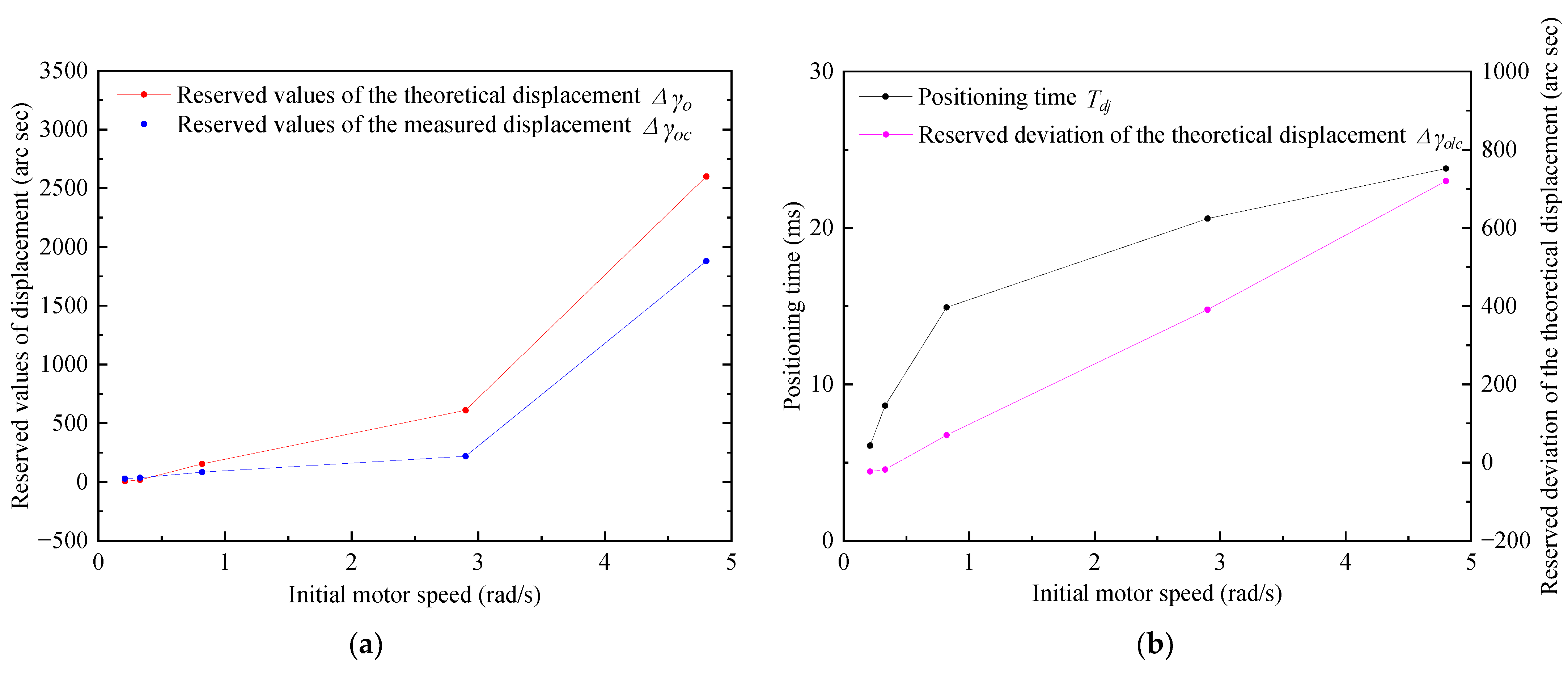
- When the initial angular velocity is greater than 0.7 rad/s, the positioning time of FSPTTPPM is less than that of TPSPM.
- of FSPTTPPM and TPSPM for the initial angular velocity from 0.24 to 1.18 rad/s varies in the ranges of −0.4 to 0.1 and −0.8 to 0.8, respectively. Compared to TPSPM, of FSPTTPPM is closer to zero.
- When the motor is used for positioning on a project, the initial angular velocity of the most closed-loop positioning controller is quite slow. According to the variation trend of the above curve, the error rate of the theoretical displacement reserved value based on TPSPM is less than that of FSPTTPPM at low speed.
5. Conclusions
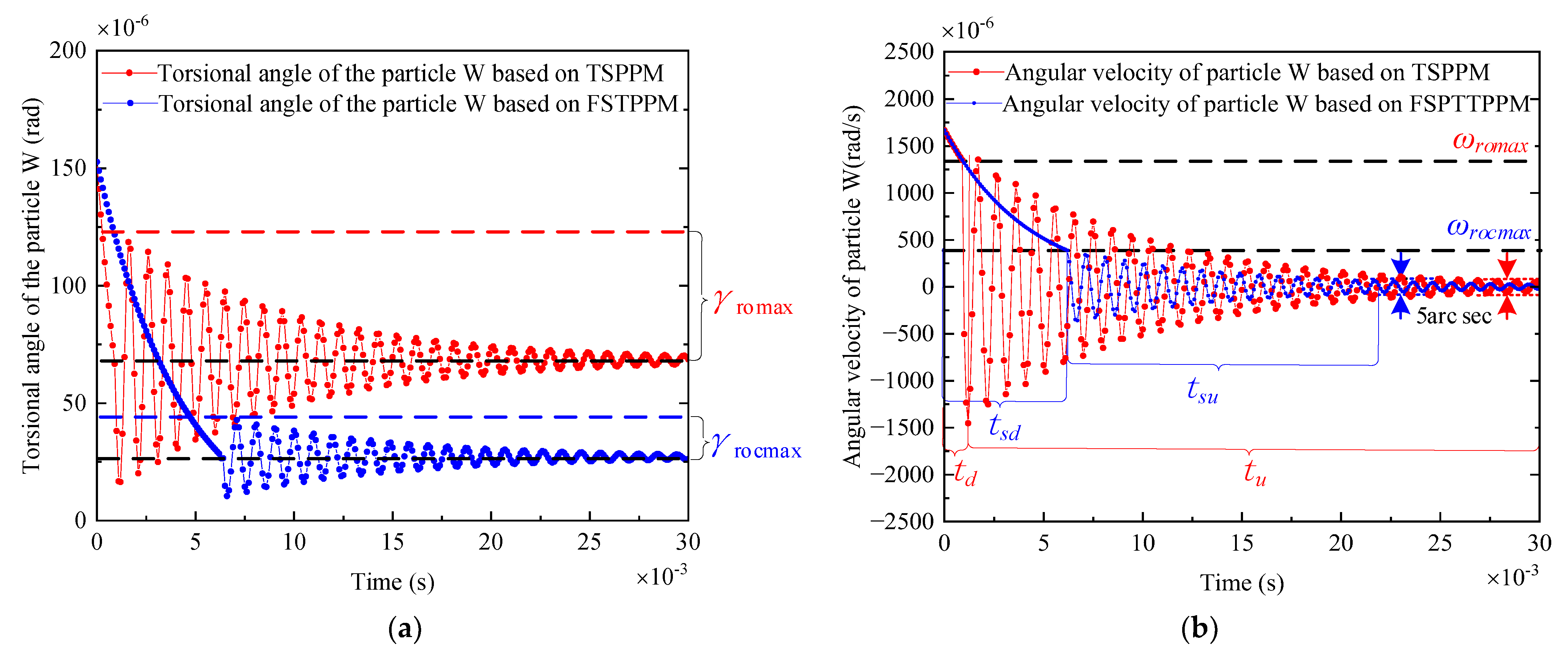
- From the analysis of the experiment of the driving circle frequency setting of , it is found that increases with increasing circle frequency difference between the driving circle frequency, , and the resonant resonance frequency for the same initial angular velocity. A driving circle frequency set to in this study thus realizes positioning with a shorter positioning time.
- When the TPSPM strategy is used for positioning and the torque of the shaft is greater than , the torque transmitted by the shaft to the rotor causes relative sliding between the friction material and the stator, and the shaft requires several cycles of damped vibration attenuation to reach the stopping position. Due to the relatively strong nonlinear creeping between the stator and the friction material during this process, it is difficult to find a theoretical formula that can accurately calculate the misaligned sliding displacement. To solve this problem, a new positioning strategy, namely, FSPTTPPM, has been proposed in this study, which is based on the principle of ultrasonic friction reduction. It keeps the friction material and the stator in a sliding state by controlling the driving circle frequency, , such that that no sliding occurs between the friction material and the stator during the torsional vibration of the shaft and the sliding displacement tends to zero. Thus, the search for a theoretical formula that can accurately calculate the sliding displacement is avoided, and by simply using Equation (27), an accurate displacement reservation value, , can be obtained.
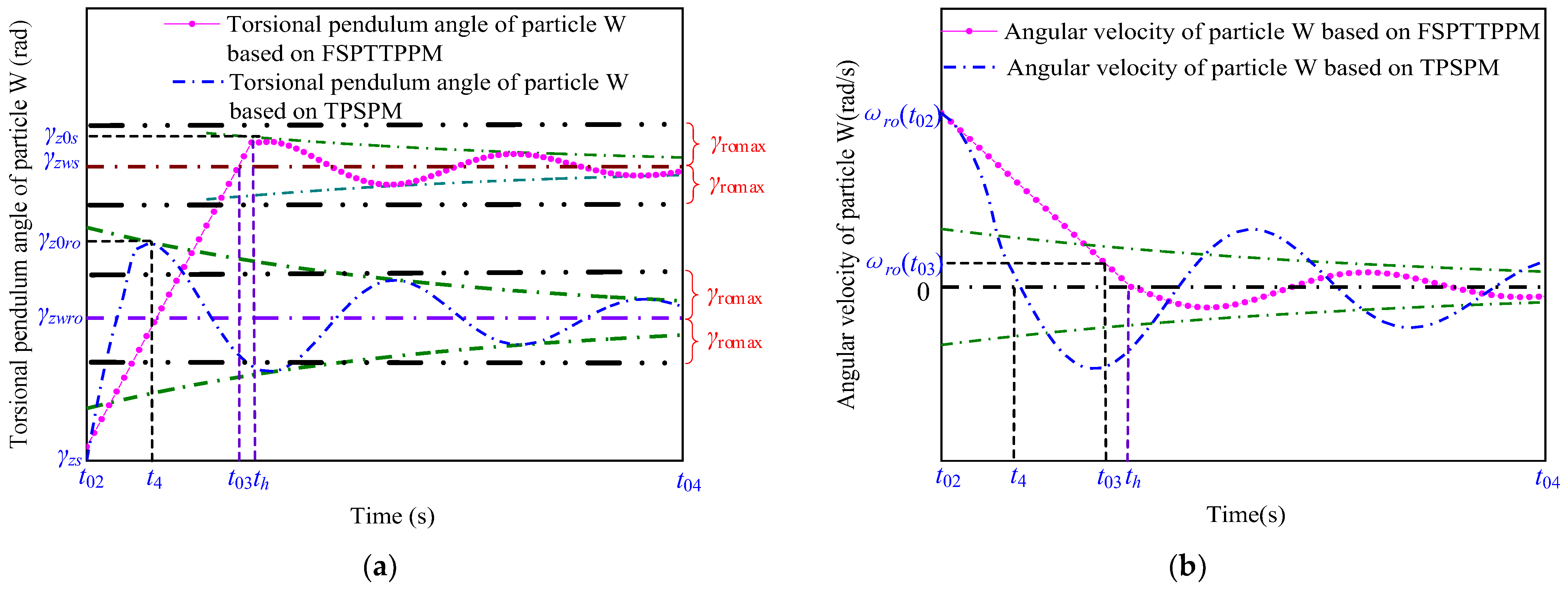
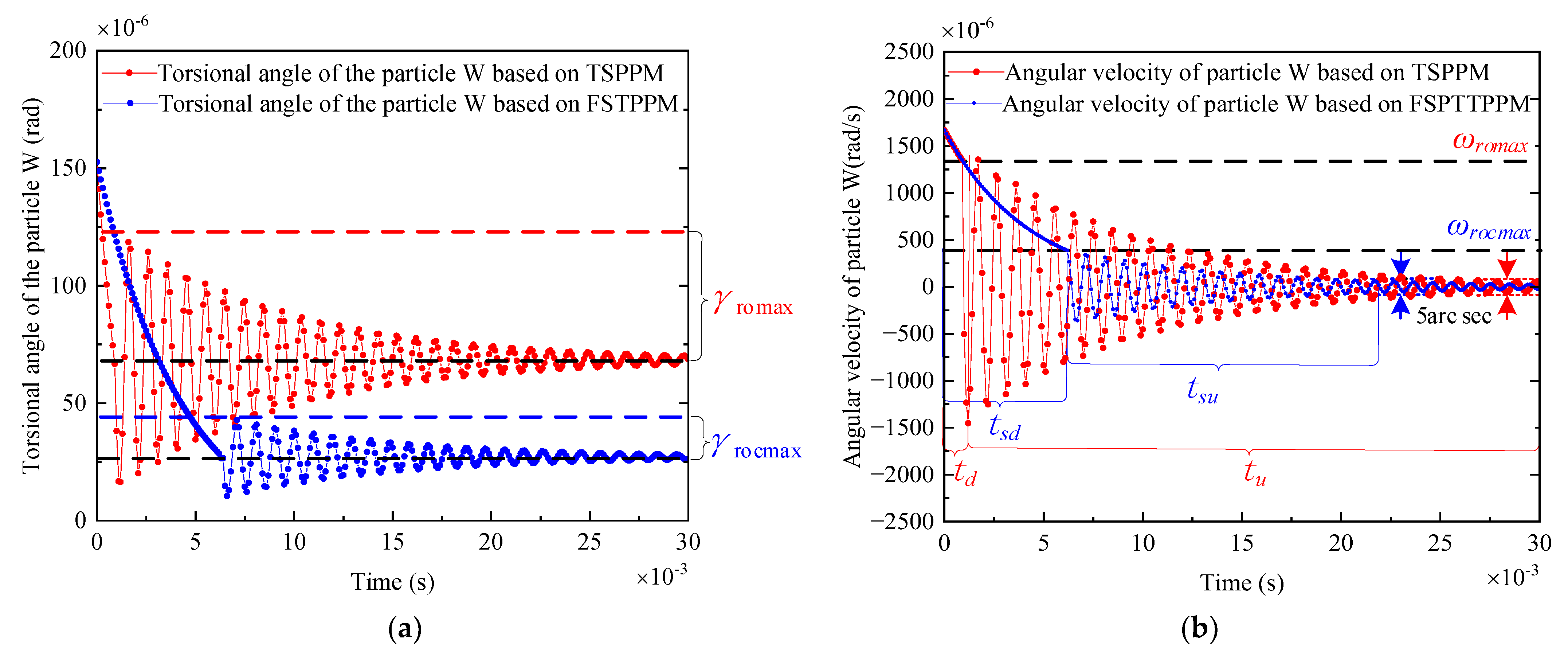
- When the two positioning strategies are used for positioning, and are almost equal, but is significantly smaller than . Thus, the positioning time of FSPTTPPM is smaller than that of TPSPM. In addition, when using TPSPM for positioning, the positioning time is not only positively related to the initial angular velocity but also positively related to the rotational inertia of the shaft. However, FSPTTPPM not only has the advantage of short positioning time but also a significantly reduced influence of the rotational inertia of the shaft on the positioning.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chau, K.T.; Shi, B.; Hu, M.Q.; Jing, L.; Fan, Y. Microstepping control of ultrasonic stepping motors. IEEE Trans. Ind. Appl. 2006, 42, 436–442. [Google Scholar] [CrossRef]
- Chu, X.; Xing, Z.; Li, L.; Gui, Z. High resolution miniaturized stepper ultrasonic motor using differential composite motion. Ultrasonics 2004, 41, 737–741. [Google Scholar] [CrossRef]
- Ogahara, Y.; Maeno, T. Torque characteristics analysis of a traveling wave type ultrasonic motor impressed high load torque in low speed range. In Proceedings of the IEEE Ultrasonics Symposium 2004, Montreal, QC, Canada, 23–27 August 2004; pp. 2271–2274. [Google Scholar]
- Ding, Z.; Wei, W.; Wang, K.; Liu, Y. An Ultrasonic Motor Using a Carbon-Fiber-Reinforced/Poly-Phenylene-Sulfide-Based Vibrator with Bending/Longitudinal Modes. Micromachines 2022, 13, 517. [Google Scholar] [CrossRef] [PubMed]
- Zhao, C. Ultrasonic Motors: Technologies and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Yang, L.; Huan, Y.; Ren, W.; Ma, C.; Tang, S.; Hu, X. Position control method for ultrasonic motors based on beat traveling wave theory. Ultrasonics 2022, 125, 106793. [Google Scholar] [CrossRef] [PubMed]
- Lu, Q.; Sun, Z.; Zhang, J.; Zhang, J.; Zheng, J.; Qian, F. A Novel Remote-Controlled Vascular Interventional Robotic System Based on Hollow Ultrasonic Motor. Micromachines 2022, 13, 410. [Google Scholar] [CrossRef]
- Xu, D.; Yang, W.; Zhang, X.; Yu, S. Design and Performance Evaluation of a Single-Phase Driven Ultrasonic Motor Using Bending-Bending Vibrations. Micromachines 2021, 12, 853. [Google Scholar] [CrossRef]
- Zeng, W.; Pan, S.; Chen, L.; Ren, W.; Hu, X. Research on Low-Speed Driving Model of Ultrasonic Motor Based on Beat Traveling Wave Theory. Actuators. Actuators 2021, 10, 304. [Google Scholar] [CrossRef]
- Zeng, W.; Pan, S.; Chen, L.; Xu, Z.; Xiao, Z.; Zhang, J. Research on Ultra-low Speed Driving Method of Traveling Wave Ultrasonic Motor for CMG. Ultrasonics 2020, 103, 106088. [Google Scholar] [CrossRef]
- Gencer, A. A comparative speed/position control technique based Fuzzy Logic control for travelling wave ultrasonic motor. In Proceedings of the 2015 7th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Bucharest, Romania, 25–27 June 2015. [Google Scholar]
- Gencer, A. A new speed/position control technique for travelling wave ultrasonic motor under different load conditions. In Proceedings of the 2014 16th International Power Electronics and Motion Control Conference and Exposition, Antalya, Turkey, 21–24 September 2014; pp. 65–70. [Google Scholar]
- Bal, G.; Bekiroǧlu, E.; Demirbaş, Ş.; Çolak, İ. Fuzzy logic based DSP controlled servo position control for ultrasonic motor. Energy Convers. Manag. 2004, 45, 3139–3153. [Google Scholar] [CrossRef]
- Senjyu, T.; Kashiwagi, T.; Uezato, K. Position control of ultrasonic motors using MRAC and dead-zone compensation with fuzzy inference. IEEE Trans. Power Electron. 2002, 17, 265–272. [Google Scholar] [CrossRef]
- Omura, T.; Tanabe, M.; Okubo, K.; Tagawa, N. Study on rotation speed control of coiled stator ultrasonic motor using pulse width modulation. In Proceedings of the 2011 IEEE International Ultrasonics Symposium, Orlando, FL, USA, 18–21 October 2011; pp. 1680–1682. [Google Scholar]
- Chen, N.; Zheng, J.; Jiang, X.; Fan, S.; Fan, D. Analysis and control of micro-stepping characteristics of ultrasonic motor. Front. Mech. Eng. 2020, 15, 585–599. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Y.; Li, K.; Chen, S.; Tian, X. Development of a resonant type piezoelectric stepping motor using longitudinal and bending hybrid bolt-clamped transducer. Sens. Actuators A Phys. 2019, 285, 182–189. [Google Scholar] [CrossRef]
- Shi, Y.; Zhang, J.; Lin, Y.; Wu, W. Improvement of low-speed precision control of a butterfly-shaped linear ultrasonic motor. IEEE Access 2020, 8, 135131–135137. [Google Scholar] [CrossRef]
- Snitka, V. Ultrasonic actuators for nanometre positioning. Ultrasonics 2000, 38, 20–25. [Google Scholar] [CrossRef]
- Delibas, B.; Koc, B. A method to realize low velocity movability and eliminate friction induced noise in piezoelectric ultrasonic motors. IEEE/ASME Trans. Mechatron. 2020, 25, 2677–2687. [Google Scholar] [CrossRef]
- Giraud, F.; Lemaire-Semail, B.; Aragones, J.; Robineau, J.P.; Audren, J.-T. Precise position control of a traveling-wave ultrasonic motor. IEEE Trans. Ind. Appl. 2007, 43, 934–941. [Google Scholar] [CrossRef]
- Huang, J.; Sun, D. Performance Analysis of a Travelling-Wave Ultrasonic Motor under Impact Load. Micromachines 2020, 11, 689. [Google Scholar] [CrossRef]
- Goodno, B.J.; Gere, J.M. Mechanics of Materials; Cengage Learning: Belmont, CA, USA, 2020. [Google Scholar]
- Wang, Y.; Liang, L.; Yuan, Y.; Xu, G.; Liu, F. A two fiber bragg gratings sensing system to monitor the torque of rotating shaft. Sensors 2016, 16, 138. [Google Scholar] [CrossRef]
- Jansen, J.D.; Van Den Steen, L. Active damping of self-excited torsional vibrations in oil well drillstrings. J. Sound Vib. 1995, 179, 647–668. [Google Scholar] [CrossRef]
- Lin, R.; Wei, S.; Yuan, X. Low-speed instability analysis for hydraulic motor based on nonlinear dynamics. J. Coal Sci. Eng. 2010, 16, 328–332. [Google Scholar] [CrossRef]
- Jiang, W.B.; Liu, S.K.; Zou, B.H. Research on simulation of hydraulic motor’s low speed stability based on Matlab/Simulink. Min. Metall. Eng. 2008, 28, 94–97. [Google Scholar]
- Yang, S.; Li, Y.; Qiao, G.; Ning, P.; Lu, X.; Cheng, T. Piezoelectric stick-slip actuator integrated with ultrasonic vibrator for improving comprehensive output performance. Smart Mater. Struct. 2021, 30, 125033. [Google Scholar] [CrossRef]
- Chen, S.; Zou, P.; Tian, Y.J.; Mao, L. Reducing Friction Mechanism of Superalloy Axial Ultrasonic Vibration Drilling. J. Northeast. Univ. 2018, 39, 1485–1489. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Numerical Value (Unit) |
|---|---|---|
| Moment of inertia of the shaft | 1.7 × 10−4 (kg·m2) | |
| Rotational inertia of the rotor | 8 × 10−8 (kg·m2) | |
| Sliding friction coefficient | 0.3 | |
| Damping coefficient of the rotation direction of the rotor | 0.05 | |
| Damping coefficient of the shaft direction | 0.04 | |
| Length of the shaft | 180 (mm) | |
| Poisson’s ratio of the shaft material | 0.31 | |
| Young’s modulus of the shaft material | 20 (GPa) | |
| Stator radius | 30 (mm) | |
| Shaft diameter | 50 (mm) | |
| Stiffness factor of the shaft direction | 200 (GPa) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, W.; Pan, S.; Chen, L.; Ren, W.; Huan, Y.; Liang, Y. Research on Fast and Precise Positioning Strategy of an Ultrasonic Motor Based on the Ultrasonic Friction Reduction Theory. Micromachines 2022, 13, 1542. https://doi.org/10.3390/mi13091542
Zeng W, Pan S, Chen L, Ren W, Huan Y, Liang Y. Research on Fast and Precise Positioning Strategy of an Ultrasonic Motor Based on the Ultrasonic Friction Reduction Theory. Micromachines. 2022; 13(9):1542. https://doi.org/10.3390/mi13091542
Chicago/Turabian StyleZeng, Weijun, Song Pan, Lei Chen, Weihao Ren, Yongjie Huan, and Yongjin Liang. 2022. "Research on Fast and Precise Positioning Strategy of an Ultrasonic Motor Based on the Ultrasonic Friction Reduction Theory" Micromachines 13, no. 9: 1542. https://doi.org/10.3390/mi13091542
APA StyleZeng, W., Pan, S., Chen, L., Ren, W., Huan, Y., & Liang, Y. (2022). Research on Fast and Precise Positioning Strategy of an Ultrasonic Motor Based on the Ultrasonic Friction Reduction Theory. Micromachines, 13(9), 1542. https://doi.org/10.3390/mi13091542