
Optimized Design of a Self-Biased Amplifier for Seizure Detection Supplied by Piezoelectric Nanogenerator: Metaheuristic Algorithms versus ANN-Assisted Goal Attainment Method





Abstract
:1. Introduction
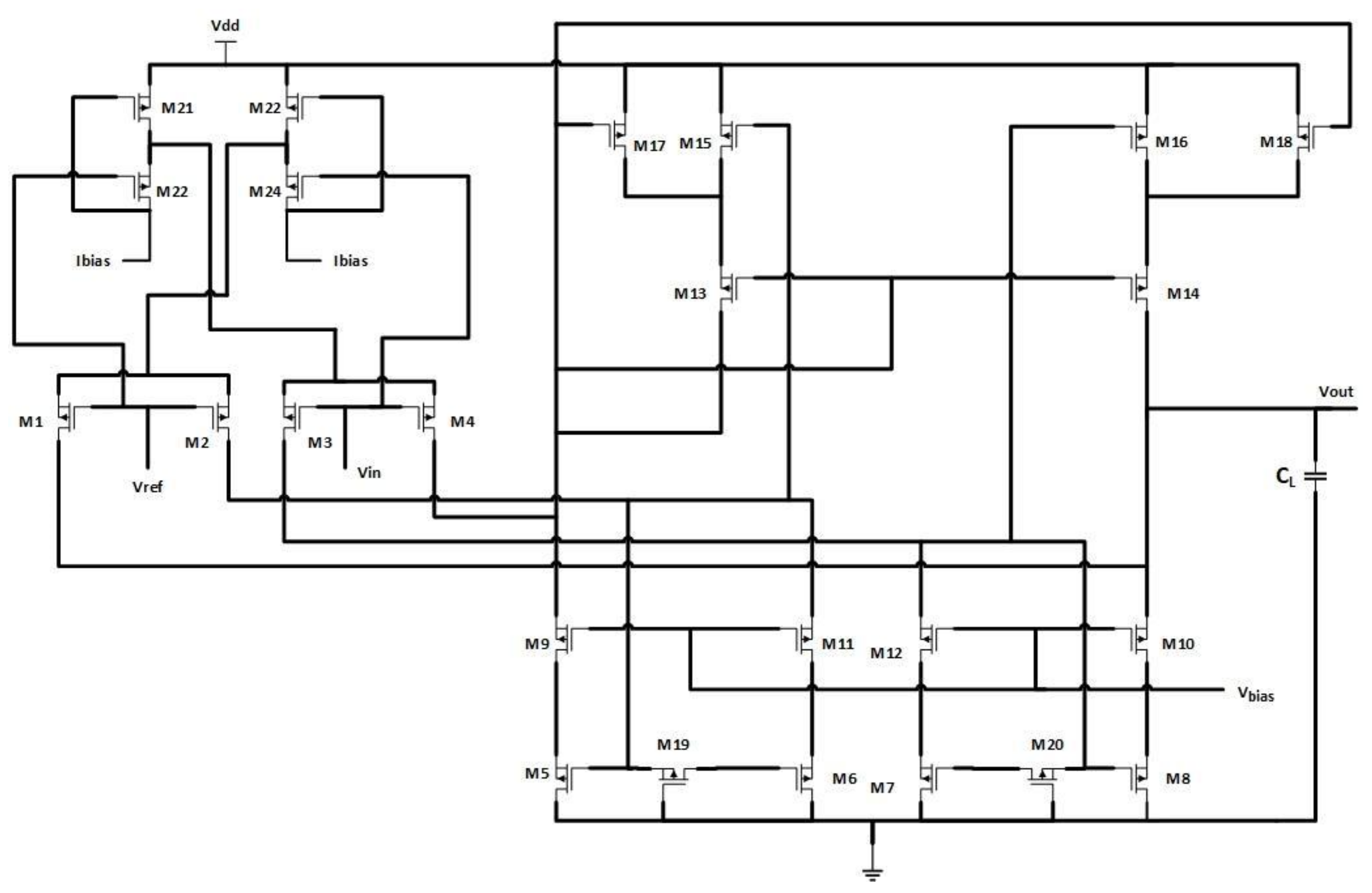
2. Modified Recycling Folded Cascode Amplifier (MRFC)
2.1. Drain Current Equations in Weak Inversion
2.2. Adaptive Biasing Technique
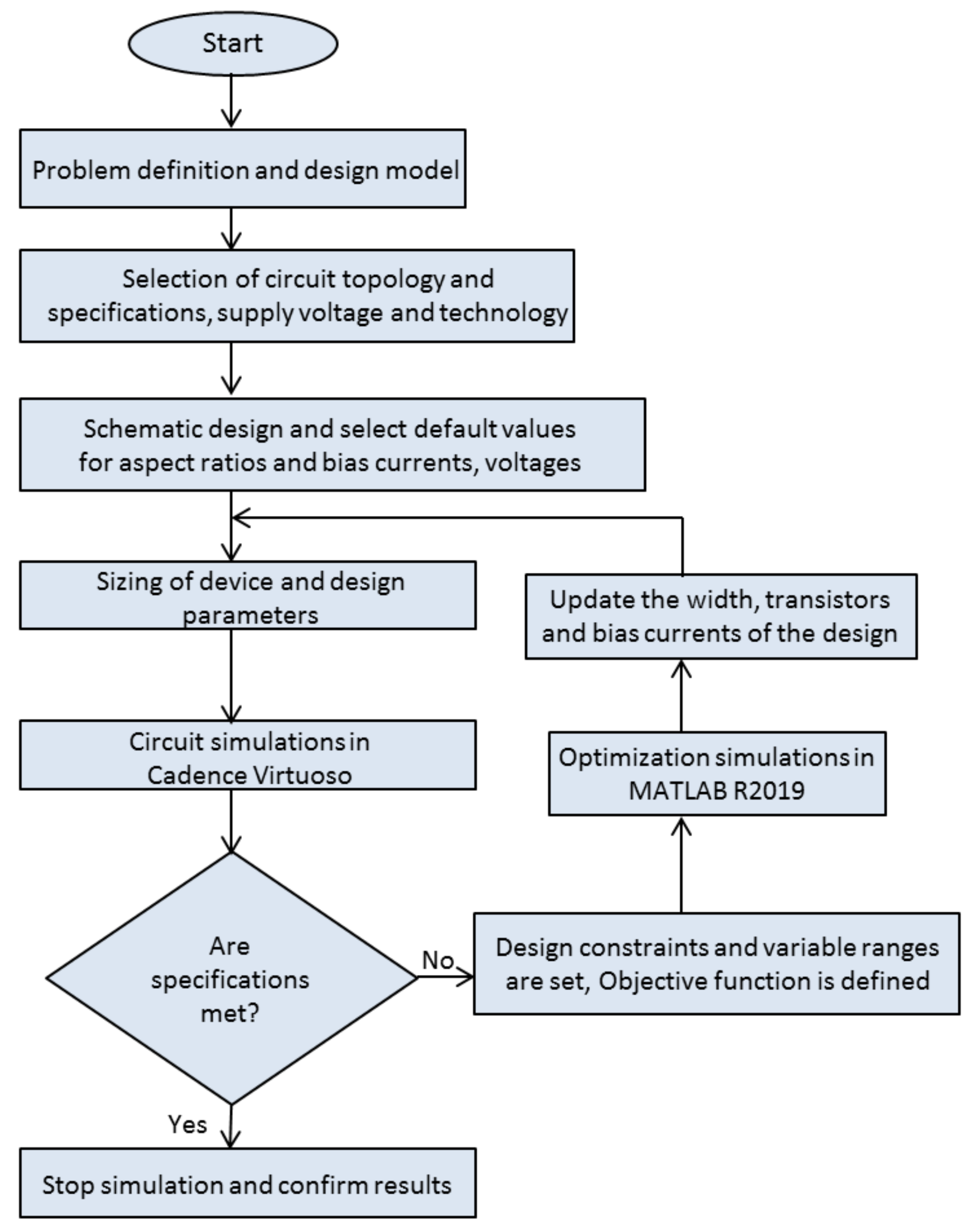
2.3. Design Procedure
3. Meta-Heuristic Optimization Algorithms
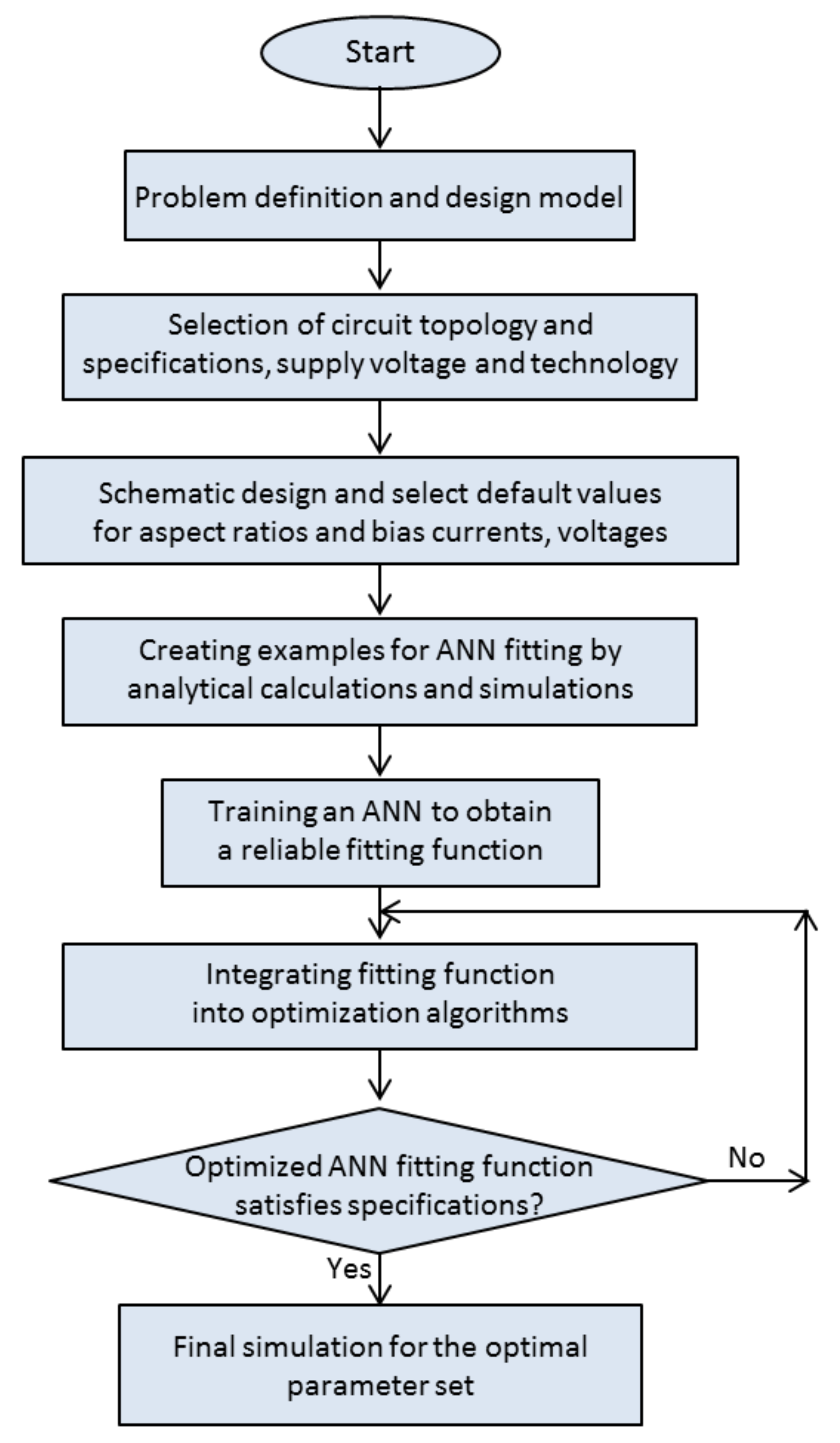
4. ANN-Assisted Goal Attainment Method
4.1. ANN Fitting of the Overall Circuit Area
4.2. Goal Attainment Method
5. Results and Discussion
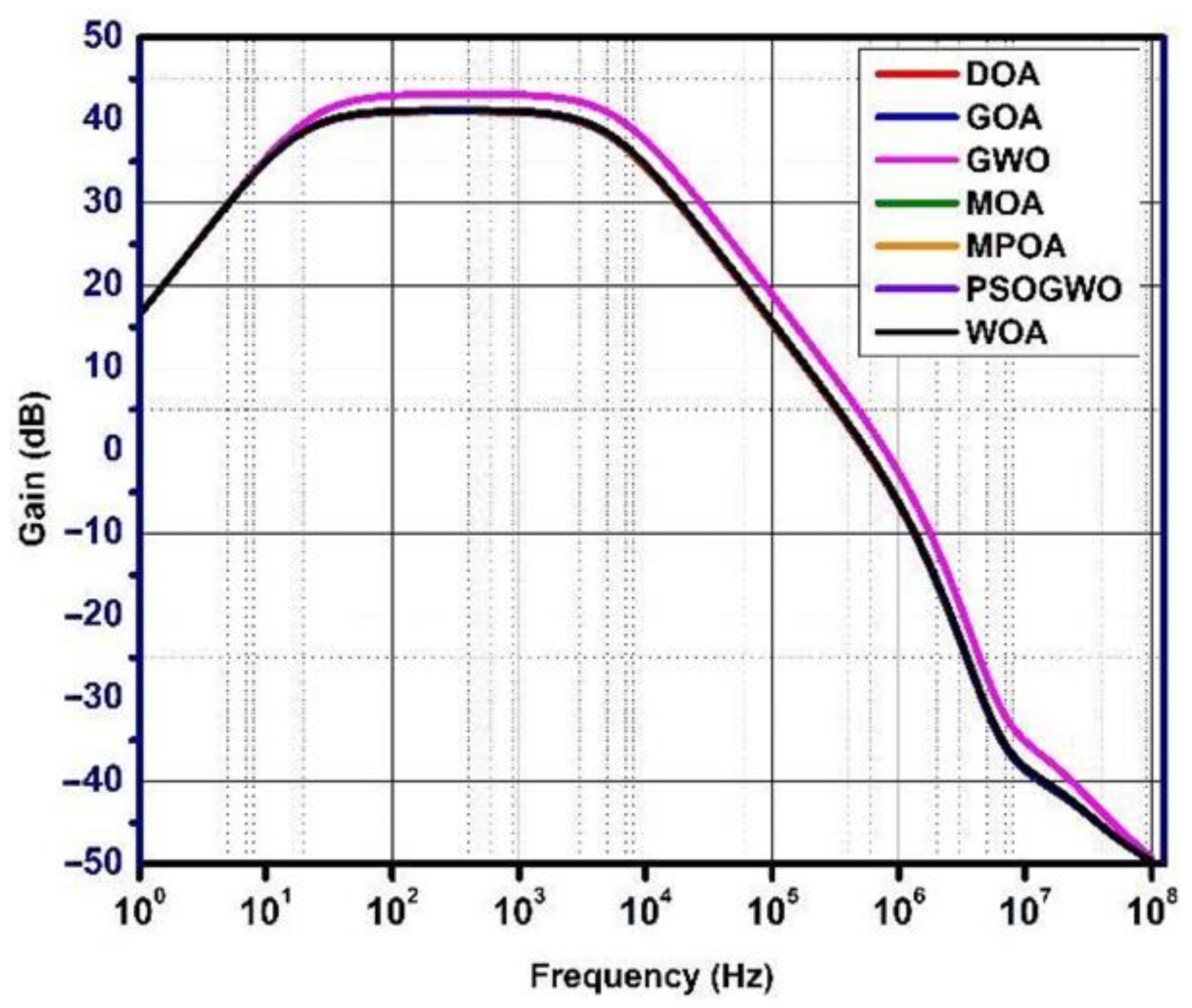
5.1. Results of Metaheuristic Algorithms
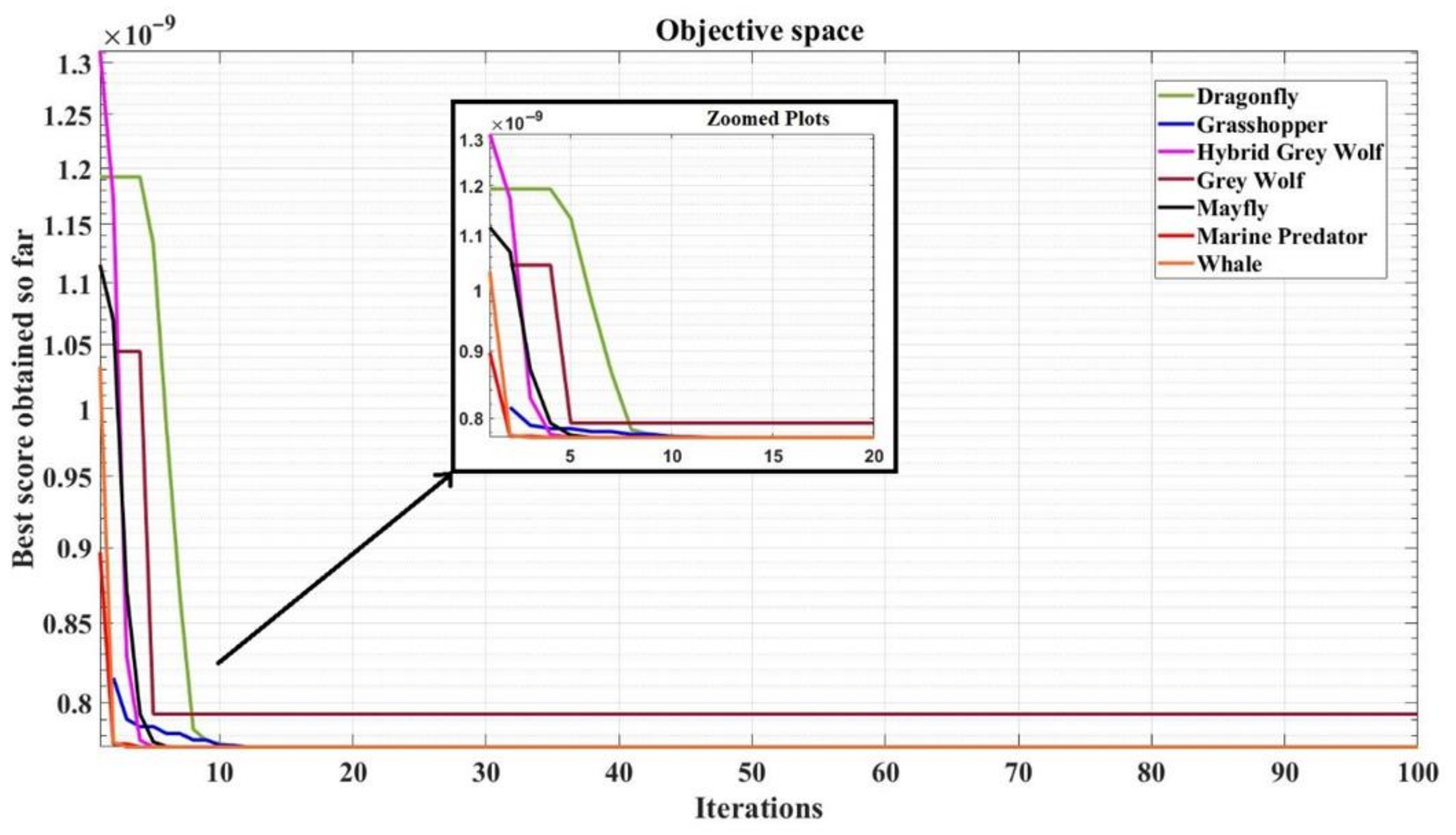
- In the Dragonfly Optimization Algorithm (DOA), the explorative and exploitative activities can be accomplished through the parameters: separation (s), alignment weight (a), cohesion weight (c), food factor (f), and enemy factor (e). These are dependent on the maximum number of iterations, which is considered to be 100 for a variable dimension of 8 and a search agent number of 80.
- In Grasshopper Optimization Algorithm (GOA), the exploration and exploitation phase are controlled by the coefficient “c” and are dependent on the number of iterations, 100 and with search agents of 50; cmax and cmin are the maximum and minimum values that are selected as 1 and 0.00004.
- In both the grey wolf optimization (GWO) and hybrid particle swarm optimization–grey wolf optimization (PSO–GWO), the number of search agents is 30 for a dimension of 8, while A and C are the coefficient vectors. However, in PSO–GWO the particle swarm algorithm parameters are also employed. Both the social learning and cognitive learning coefficients are kept as 0.5.
- In the Mayfly Optimization Algorithm (MOA), the male, female, and offspring population size for mayfly swarm agents is 20 each, and the inertia weight and weight damping ratio are taken as 0.8 and 1. The personal learning, global learning, and distance sight coefficients are selected as 1, 1.5, and 2. Moreover, nuptial dance, random flight, damping ratio, and mutation rates are 5, 1, 0.8, 0.99, and 0.01.
- In the Marine Predators Optimization Algorithm (MPOA), the value of the drifting Fish Aggregating Device (FAD) is kept as 0.2. P is a constant number and is equal to 0.5; the size of the search agents is 25, and the dimension is 8.
- In the whale optimization algorithm (WOA), the parameters a, l, and p are random numbers in the ranges [0, 2], [–1, 1], and [0, 1]. A and C are coefficient factors. The number of search agents is considered to be 200 for a dimension of 8 and iteration value of 100.
5.2. Results of ANN-Assisted Goal Attainment Method
5.3. Comparative Analysis of Optimization Results
5.4. PENG Supply
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kim, T.; Nguyen, P.; Pham, N.; Bui, N.; Truong, H.; Ha, S.; Vu, T. Epileptic seizure detection and experimental treatment: A review. Front. Neurol. 2020, 11, 701. [Google Scholar] [CrossRef] [PubMed]
- Harpale, V.; Bairagi, V. FPGA based architecture implementation for epileptic seizure detection using one way ANOVA and genetic algorithm. Biomed. Pharmacol. J. 2019, 12, 1543–1553. [Google Scholar] [CrossRef]
- Vergara, P.M.; de la Cal, E.; Villar, J.R.; González, V.M.; Sedano, J. An IoT platform for epilepsy monitoring and supervising. J. Sens. 2017, 2017, 6043069. [Google Scholar] [CrossRef] [Green Version]
- Bruno, E.; Viana, P.F.; Sperling, M.R.; Richardson, M.P. Seizure detection at home: Do devices on the market match the needs of people living with epilepsy and their caregivers? Epilepsia 2020, 61, S11–S24. [Google Scholar] [CrossRef] [PubMed]
- Siddiqui, M.K.; Morales-Menendez, R.; Huang, X.; Hussain, N. A review of epileptic seizure detection using machine learning classifiers. Brain Inform. 2020, 7, 5. [Google Scholar] [CrossRef]
- Torse, D.; Desai, V.; Khanai, R. An optimized design of seizure detection system using joint feature extraction of multichannel EEG signals. J. Biomed. Res. 2020, 34, 191. [Google Scholar] [CrossRef]
- Shoeibi, A.; Khodatars, M.M.; Ghassemi, N.; Jafari, M.; Moridian, P.; Alizadehsani, R.; Panahiazar, M.M.; Khozeimeh, F.; Zare, A.; Hosseini-Nejad, H.; et al. Epileptic seizures detection using deep learning techniques: A review. Int. J. Environ. Res. Public Health 2021, 18, 5780. [Google Scholar] [CrossRef]
- Ouichka, O.; Echtioui, A.; Hamam, H. Deep Learning Models for Predicting Epileptic Seizures Using iEEG Signals. Electronics 2022, 11, 605. [Google Scholar] [CrossRef]
- Wong, S.; Mani, R.; Danish, S. Comparison and selection of current implantable anti-epileptic devices. Neurotherapeutics 2019, 16, 369–380. [Google Scholar] [CrossRef]
- Türe, K.; Dehollain, C.; Maloberti, F. Implantable monitoring system for epilepsy. In Wireless Power Transfer and Data Communication for Intracranial Neural Recording Applications; Springer: Berlin/Heidelberg, Germany, 2020; pp. 11–23. [Google Scholar] [CrossRef]
- Salam, M.T.; Mounaïm, F.; Nguyen, D.K.; Sawan, M. Low-power circuit techniques for epileptic seizures detection and subsequent neurostimulation. J. Low Power Electron. 2012, 8, 133–145. [Google Scholar] [CrossRef]
- Wang, W.; Pang, J.; Su, J.; Li, F.; Li, Q.; Wang, X.; Wang, J.; Ibarlucea, B.; Liu, X.; Li, Y.; et al. Applications of nanogenerators for biomedical engineering and healthcare systems. InfoMat 2022, 4, e12262. [Google Scholar] [CrossRef]
- Zhang, C.; Fan, W.; Wang, S.; Wang, Q.; Zhang, Y.; Dong, K.K. Recent Progress of Wearable Piezoelectric Nanogenerators. ACS Appl. Electron. Mater. 2021, 3, 2449–2467. [Google Scholar] [CrossRef]
- Purusothaman, Y.; Alluri, N.R.; Chandrasekhar, A.; Vivekananthan, V.; Kim, S.-J. Piezophototronic gated optofluidic logic computations empowering intrinsic reconfigurable switches. Nat. Commun. 2019, 10, 4381. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vivekananthan, V.; Alluri, N.R.; Chandrasekhar, A.; Purusothaman, Y.; Gupta, A.; Kim, S.-J. Zero-power consuming intruder identification system by enhanced piezoelectricity of K0.5Na0.5NbO3 using substitutional doping of BTO NPs. J. Mater. Chem. C 2019, 7, 7563–7571. [Google Scholar] [CrossRef]
- Vivekananthan, V.; Raj, N.P.M.J.; Alluri, N.R.; Purusothaman, Y.; Chandrasekhar, A.; Kim, S.-J. Substantial improvement on electrical energy harvesting by chemically modified/sandpaper-based surface modification in micro-scale for hybrid nanogenerators. Appl. Surf. Sci. 2020, 514, 145904. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, Y.; Qiu, Y.; Wu, H.; Qin, W.; Liao, Y.; Yu, Q.; Cheng, H. Stretchable piezoelectric energy harvesters and self-powered sensors for wearable and implantable devices. Biosens. Bioelectron. 2020, 168, 112569. [Google Scholar] [CrossRef]
- Zheng, Q.; Shi, B.; Li, Z.; Wang, Z.L. Recent progress on piezoelectric and triboelectric energy harvesters in biomedical systems. Adv. Sci. 2017, 4, 1700029. [Google Scholar] [CrossRef]
- Jiang, L.; Yang, Y.; Chen, R.; Lu, G.; Li, R.; Li, D.; Humayun, M.S.; Shung, K.; Zhu, J.; Chen, Y.; et al. Flexible piezoelectric ultrasonic energy harvester array for bio-implantable wireless generator. Nano Energy 2019, 56, 216–224. [Google Scholar] [CrossRef]
- Salim, M.; Salim, D.; Chandran, D.; Aljibori, H.S.; Kherbeet, A.S. Review of nano piezoelectric devices in biomedicine applications. J. Intell. Mater. Syst. Struct. 2018, 29, 2105–2121. [Google Scholar] [CrossRef]
- Azimi, S.; Golabchi, A.; Nekookar, A.; Rabbani, S.; Amiri, M.H.; Asadi, K.; Abolhasani, M.M. Self-powered cardiac pacemaker by piezoelectric polymer nanogenerator implant. Nano Energy 2021, 83, 105781. [Google Scholar] [CrossRef]
- Haq, M. Application of piezo transducers in biomedical science for health monitoring and energy harvesting problems. Mater. Res. Express 2018, 6, 022002. [Google Scholar] [CrossRef]
- Nanda, A.; Karami, M.A. Energy harvesting from arterial blood pressure for powering embedded micro sensors in human brain. J. Appl. Phys. 2017, 121, 124506. [Google Scholar] [CrossRef]
- Liu, B.; Fernández, F.V.; Gielen, G.G. Efficient and accurate statistical analog yield optimization and variation-aware circuit sizing based on computational intelligence techniques. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2011, 30, 793–805. [Google Scholar] [CrossRef] [Green Version]
- Liao, T.; Zhang, L. Analog integrated circuit sizing and layout dependent effects: A review. J. Microelectron. Solid State Electron. 2014, 3, 17–29. [Google Scholar] [CrossRef]
- Mallick, S.; Kar, R.; Mandal, D.; Ghoshal, S.P. Optimal sizing of CMOS analog circuits using gravitational search algorithm with particle swarm optimization. Int. J. Mach. Learn. Cybern. 2017, 8, 309–331. [Google Scholar] [CrossRef]
- Dokeroglu, T.; Sevinc, E.; Kucukyilmaz, T.; Cosar, A. A survey on new generation metaheuristic algorithms. Comput. Ind. Eng. 2019, 137, 106040. [Google Scholar] [CrossRef]
- Vural, R.A.; Yildirim, T. Analog circuit sizing via swarm intelligence. AEU-Int. J. Electron. Commun. 2012, 66, 732–740. [Google Scholar] [CrossRef]
- Motlak, H.J.; Mohammed, M.J. Design of self-biased folded cascode CMOS op-amp using PSO algorithm for low-power applications. Int. J. Electron. Lett. 2019, 7, 85–94. [Google Scholar] [CrossRef]
- Kudikala, S.; Sabat, S.L.; Udgata, S.K. Performance study of harmony search algorithm for analog circuit sizing. In Proceedings of the 2011 International Symposium on Electronic System Design, Kochi, India, 19–21 December 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 12–17. [Google Scholar] [CrossRef]
- Majeed, M.M.; Rao, P.S. Optimization of CMOS Analog Circuits Using Grey Wolf Optimization Algorithm. In Proceedings of the 2017 14th IEEE India Council International Conference (INDICON), Roorkee, India, 15–17 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Majeed, M.M.; Patri, S.R. A hybrid of WOA and mGWO algorithms for global optimization and analog circuit design automation. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2019, 38, 452–476. [Google Scholar] [CrossRef]
- Acharya, R.Y.; Charlot, N.F.; Alam, M.M.; Ganji, F.; Gauthier, D.; Forte, D. Chaogate Parameter Optimization using Bayesian Optimization and Genetic Algorithm. In Proceedings of the 2021 22nd International Symposium on Quality Electronic Design (ISQED), Santa Clara, CA, USA, 7–9 April 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 426–431. [Google Scholar] [CrossRef]
- Nam, J.W.; Cho, Y.K.; Lee, Y.K. Regression Model-Based AMS Circuit Optimization Technique Utilizing Parameterized Operating Condition. Electronics 2022, 11, 408. [Google Scholar] [CrossRef]
- Zhao, S.; Blaabjerg, F.; Wang, H. An overview of artificial intelligence applications for power electronics. IEEE Trans. Power Electron. 2020, 36, 4633–4658. [Google Scholar] [CrossRef]
- Fayazi, M.; Colter, Z.; Afshari, E.; Dreslinski, R. Applications of artificial intelligence on the modeling and optimization for analog and mixed-signal circuits: A review. IEEE Trans. Circuits Syst. I 2021, 68, 2418–2431. [Google Scholar] [CrossRef]
- Huang, G.; Hu, J.; He, Y.; Liu, J.; Ma, M.; Shen, Z.; Wang, Y. Machine learning for electronic design automation: A survey. ACM Trans. Des. Autom. Electron. Syst. (TODAES) 2021, 26, 1–46. [Google Scholar] [CrossRef]
- Devi, S.; Guha, K.; Laskar, N.M.; Nath, S.; Baishnab, K.L.; Iannacci, J.; Krishnaswamy, N. Modelling and analysis of a modified preamplifier for seizure detection. Microsyst. Technol. 2021, 27, 3545–3558. [Google Scholar] [CrossRef]
- Akbari, M.; Hashemipour, O.; Javid, A. An ultra-low voltage, ultra-low power fully recycling folded cascode amplifier. In Proceedings of the 2014 22nd Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 20–22 May 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 514–518. [Google Scholar] [CrossRef]
- Akbari, M.; Hashemipour, O. Design and analysis of folded cascode OTAs using Gm/Id methodology based on flicker noise reduction. Analog. Integr. Circuits Signal Process. 2015, 83, 343–352. [Google Scholar] [CrossRef]
- Sarkar, A.; Panda, S.S. Design of a power efficient, high slew rate and gain boosted improved recycling folded cascode amplifier with adaptive biasing technique. Microsyst. Technol. 2017, 23, 4255–4262. [Google Scholar] [CrossRef]
- Baswa, S.; Lopez-Martin, A.J.; Carvajal, R.G.; Ramirez-Angulo, J. Low-voltage power-efficient adaptive biasing for CMOS amplifiers and buffers. Electron. Lett. 2004, 40, 217–219. [Google Scholar] [CrossRef]
- Vittoz, E.; Fellrath, J. CMOS analog integrated circuits based on weak inversion operations. IEEE J. Solid-State Circuits 1977, 12, 224–231. [Google Scholar] [CrossRef] [Green Version]
- Aiyappa, B.N.; Madhusudan, M.; Yashaswini, B.; Yatish, R.; Nithin, M. Amplifier design in weak inversion and strong inversion—A case study. In Proceedings of the 2017 International Conference on Communication and Signal Processing (ICCSP), Melmaruvathur, India, 6–8 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1227–1231. [Google Scholar] [CrossRef]
- Vij, S.; Gupta, A.; Mittal, A. A Highly Adaptive Operational Amplifier with Recycling Folded Cascode Topology. Comput. Sci. Inf. Technol. 2014, 14, 135–145. [Google Scholar] [CrossRef]
- Wang, H.; Qiao, Z.; Xu, Y.; Zhang, G. Design Procedure for a Folded-Cascode and Class AB Two-Stage CMOS Operational Amplifier. In Proceedings of the 2019 IEEE International Conference of Intelligent Applied Systems on Engineering (ICIASE), Fuzhou, China, 26–29 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 40–43. [Google Scholar] [CrossRef]
- Banagozar, S.; Yargholi, M. Ultra-low power two-stage class-AB recycling double folded cascode OTA. AEU-Int. J. Electron. Commun. 2019, 110, 152848. [Google Scholar] [CrossRef]
- Singh, C.L.; Anandini, C.; Gogoi, A.J.; Baishnab, K.L. Automated sizing of low-noise CMOS analog amplifier using ALCPSO optimization algorithm. J. Inf. Optim. Sci. 2018, 39, 99–111. [Google Scholar] [CrossRef]
- Kalayci, C.B.; Ertenlice, O.; Akbay, M.A. A comprehensive review of deterministic models and applications for mean-variance portfolio optimization. Expert Syst. Appl. 2019, 125, 345–368. [Google Scholar] [CrossRef]
- Liao, T.; Zhang, L. Layout-dependent effects aware g m/i D-based many-objective sizing optimization for analog integrated circuits. In Proceedings of the 2018 IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Drira, N.; Kotti, M.; Fakhfakh, M.; Siarry, P.; Tlelo-Cuautle, E. Convergence rates of the efficient global optimization algorithm for improving the design of analog circuits. Analog. Integr. Circuits Signal Process. 2020, 103, 143–162. [Google Scholar] [CrossRef]
- Mirjalili, S. Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural Comput. Appl. 2016, 27, 1053–1073. [Google Scholar] [CrossRef]
- Mafarja, M.M.; Eleyan, D.; Jaber, I.; Hammouri, A.; Mirjalili, S. Binary dragonfly algorithm for feature selection. In Proceedings of the 2017 International Conference on New Trends in Computing Sciences (ICTCS), Amman, Jordan, 11–13 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 12–17. [Google Scholar] [CrossRef] [Green Version]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper optimisation algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef] [Green Version]
- Faris, H.; Aljarah, I.; Al-Betar, M.A.; Mirjalili, S. Grey wolf optimizer: A review of recent variants and applications. Neural Comput. Appl. 2018, 30, 413–435. [Google Scholar] [CrossRef]
- Chopra, N.; Kumar, G.; Mehta, S. Hybrid GWO-PSO algorithm for solving convex economic load dispatch problem. Int. J. Res. Adv. Technol. 2016, 4, 37–41. [Google Scholar]
- Zervoudakis, K.; Tsafarakis, S. A mayfly optimization algorithm. Comput. Ind. Eng. 2020, 145, 106559. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mohammadzaheri, M.; Tafreshi, R.; Khan, Z.; Ghodsi, M.; Franchek, M.; Grigoriadis, K. Modelling of Petroleum Multiphase Flow in Electrical Submersible Pumps with Shallow Artificial Neural Networks. Ships Offshore Struct. 2020, 15, 174–183. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Levenberg, K. A method for the solution of certain non-linear problems in least squares. Quart. Appl. Math 1944, 2, 164–168. [Google Scholar] [CrossRef] [Green Version]
- Mardquardt, D.W. An algorithm for least square estimation of parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Wattanapanitch, W.; Fee, M.; Sarpeshkar, R. An energy-efficient micropower neural recording amplifier. IEEE Trans. Biomed. Circ. Syst. 2007, 1, 136–147. [Google Scholar] [CrossRef]
- Chaturvedi, V.; Amrutur, B. An area-efficient noise-adaptive neural amplifier in 130 nm CMOS technology. IEEE J. Emerg. Select. Top. Circ. Syst. 2011, 1, 536–545. [Google Scholar] [CrossRef]
- Ruiz-Amaya, J.; Rodriguez-Perez, A.; Delgado-Restituto, M. A low noise amplifier for neural spike recording interfaces. Sensors 2015, 15, 25313–25335. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.S.; Cha, H.-K. A low-noise biopotential CMOS amplifier IC using low-power two-stage OTA for neural recording applications. J. Circ. Syst. Comput. 2018, 27, 1850068. [Google Scholar] [CrossRef]
- Gupta, L.; Kumar, A. Open Loop Trans-conductance Amplifier design for Neural Signals. IOP Conf. Ser. Mat. Sci. Eng. 2021, 1033, 012036. [Google Scholar] [CrossRef]
- Jakšić, O. ANN-assisted Goal attainment method for optimal design of a preamplifier. Mendeley Data 2022, 1, 1. [Google Scholar] [CrossRef]
- Mohammadzaheri, M.; Tafreshi, R.; Khan, Z.; Franchek, M.; Grigoriadis, K. An Intelligent Approach to Optimize Multiphase Subsea Oil Fields Lifted by Electrical Submersible Pumps. J. Comp. Sci. 2016, 15, 50–59. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No Free Lunch Theorems for Optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Hwang, G.T.; Kim, Y.; Lee, J.H.; Oh, S.; Jeong, C.K.; Park, D.Y.; Ryu, J.; Kwon, H.; Lee, S.-G.; Joung, B.; et al. Self-powered deep brain stimulation via a flexible PIMNT energy harvester. Energy Environ. Sci. 2015, 8, 2677–2684. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, L.; Gao, X.; Liu, C.; Chen, H.; Zheng, H.; Gui, J.; Sun, C.; Yu, L.; Guo, S. Performance-enhanced flexible piezoelectric nanogenerator via layer-by-layer assembly for self-powered vagal neuromodulation. Nano Energy 2021, 89, 106319. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Ranges |
|---|---|
| Slew rate (V/µs) | 1 to 10 |
| Load capacitance (pF) | 5 to 10 |
| Gain bandwidth product (MHz) | 1 to 10 |
| Maximum input voltage (V) | 0.2 to 0.4 |
| Minimum input Voltage (V) | −0.4 to −0.2 |
| Power (µW) | 1 to 5 |
| Input voltage (µV) | 500 to 600 |
| Reference voltage (mV) | 1 to 2 |
| Parameters | Value |
|---|---|
| Subthreshold slope, η | 1.3 |
| Supply voltage | 0.6 V |
| Threshold voltage, Vt | −0.42 V, 0.42 V |
| Thermal voltage, VT | 26 mV |
| For NMOS λn | 0.04 V−1 |
| For PMOS λp | 0.05 V−1 |
| Maximum output voltage | 0.3 V |
| Minimum output voltage | −0.3 V |
| For NMOS, Kn (µn Cox) | 355 × 10−6 mA/V2 |
| For PMOS Kp (µp Cox) | 75 V × 10−6 mA/V2 |
| Parameters | DOA | GOA | PSO GWO | GWO | MOA | MPOA | WOA |
|---|---|---|---|---|---|---|---|
| Slew rate (V/µs) | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| Load capacitance (pF) | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
| Gain bandwidth (MHz) | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Maximum input voltage (V) | 0.24023 | 0.28355 | 0.4 | 0.4 | −0.20774 | 0.25181 | 0.2 |
| Minimum input voltage (V) | −0.39493 | −0.22107 | −0.2 | −0.4 | −0.3163 | −0.3163 | −0.30419 |
| Power (µW) | 1 | 1 | 1 | 3 | 1 | 1 | 1 |
| Input voltage (V) | 538.1976 | 500 | 500 | 600 | 500 | 566.127 | 500 |
| Reference voltage (V) | 1011.664 | 1000 | 1000 | 1100 | 1000 | 1065 | 1000 |
| Area (µm2) | 773.71 | 773.70 | 773.71 | 793.22 | 773.695 | 773.695 | 773.71 |
| Parameters | GWO | % Error | MPOA | % Error | DOA | % Error | GOA | % Error | Cadence Simulation |
| Gain | 43.16 | 4.13 | 41.255 | 0.47 | 41.022 | 1.03 | 41.135 | 0.76 | 41.45 |
| Phase | 53.64 | 13.82 | 61.96 | 0.45 | 62.597 | 0.57 | 60.13 | 3.39 | 62.24 |
| Noise | 20.63 | 0.34 | 20.558 | 0.01 | 20.616 | 0.27 | 20.617 | 0.28 | 20.56 |
| Power | 2.83 | 0.60 | 2.884 | 1.37 | 2.834 | 0.39 | 2.865 | 0.70 | 2.845 |
| Bandwidth | 6.13 | 15.66 | 5.308 | 0.15 | 5.148 | 2.87 | 5.274 | 0.49 | 5.3 |
| Area | 793.18 | 3.32 | 773.6955 | 5.7 | 773.6991 | 5.69 | 773.6956 | 5.69 | 820.38 |
| Parameters | WOA | % Error | PSOGWO | % Error | MOA | % Error | Cadence Simulation | ||
| Gain | 41.258 | 0.46 | 41.24 | 0.51 | 41.231 | 0.53 | 41.45 | ||
| Phase | 61.4 | 1.35 | 61.23 | 1.623 | 60.7 | 2.47 | 62.24 | ||
| Noise | 20.62 | 0.29 | 20.562 | 0.01 | 20.6 | 0.19 | 20.56 | ||
| Power | 2.87 | 0.88 | 2.839 | 0.21 | 2.834 | 0.39 | 2.845 | ||
| Bandwidth | 5.3088 | 0.17 | 5.3 | 0 | 5.3088 | 0.17 | 5.3 | ||
| Area | 773.697 | 5.69 | 773.6964 | 5.69 | 773.6988 | 5.69 | 820.38 | ||
| References | Gain (dB) | Phase (degrees) | Power (µW) | Noise (nV2/Hz) | Bandwidth (kHz) | Area (µm2) | Technology |
|---|---|---|---|---|---|---|---|
| Wattanapanitch et al. (2007) [64] | 40.85 | - | 7.56 | 41.95 | 5.32 | 3687.84 | 180 nm |
| Chaturvedi et al. (2011) [65] | 37 | - | 1.5 | 65.73 | 7 | 1044 | 130 nm |
| Ruiz-Amaya et al. (2015) [66] | 46 | - | 1.92 | 44.17 | 7.4 | 1077.46 | 130 nm |
| Kim et al. (2018) [67] | 39.2 | 49 | 2.4 | 67 | 28 | 2689.3 | 180 nm |
| Gupta et al. (2021) [68] | 45.88 | - | 2.39 | 16.13 | 340 | 770.4 | 180 nm |
| This work | 41.26 | 61.96 | 2.884 | 20.558 | 5.308 | 773.6955 | 180 nm |
| Set 1 | Set 2 | Set 3 | Set 4 | Set 5 | |
| Slew Rate (µV/s) | 1 | 0.9824 | 2.9 | 1.2 | 4.1 |
| Load capacitor (pF) | 10 | 10.0181 | 5 | 5 | 5 |
| GBW (MHz) | 2 | 1.8586 | 1 | 1 | 1.4 |
| Vin_m ax(V) | 0.2077 | 1.0787 | 0.4 | 0.4 | 0.4 |
| Vin_m in (V) | −0.3163 | −0.9466 | −0.2 | −0.2 | −0.2 |
| Pdiss (µW) | 1 | 1.1667 | 1.4 | 1 | 1 |
| Input Voltage (µV) | 500 | 500.0023 | 500.2 | 500 | 500 |
| Reference Voltage (µV) | 1000 | 999.9999 | 1000 | 1000 | 1000 |
| Area (µm2) | 781.49 | 746.15 | 425.73 | 369.98 | 513.38 |
| Set 6 | Set 7 | Set 8 | Set 9 | Set 10 | |
| Slew Rate (µV/s) | 4.3 | 4.8 | 0.8 | 3.5 | 8.266 |
| Load capacitor (pF) | 5 | 5 | 5 | 5.4 | 5 |
| GBW (MHz) | 1.2 | 1.2 | 1 | 1.1 | 1 |
| Vin_m ax(V) | 0.4 | 0.4 | 0.4 | 0.4 | 0.4 |
| Vin_m in (V) | −0.2 | −0.2 | −0.2 | −0.2 | −0.2 |
| Pdiss (µW) | 1 | 1 | 1 | 1 | 1 |
| Input Voltage (µV) | 500 | 500 | 500 | 500 | 500 |
| Reference Voltage (µV) | 1000 | 1000 | 1000 | 1000 | 1000 |
| Area (µm2) | 494.26 | 510.89 | 357.55 | 287.24 | 640.042 |
| Set 1 | Set 2 | Set 3 | Set 4 | Set 5 | |
| Gain (dB) | 41.187 | 42.273 | 46.7917 | 47.7046 | 47.7658 |
| Phase (degrees) | 63.119 | 63.02 | 59.33 | 46.321 | 43.146 |
| Noise (µV2/Hz) | 20.619 | 20.643 | 20.7773 | 20.797 | 20.525 |
| Power (µW) | 2.86 | 2.682 | 2.23 | 0.81562 | 4.7027 |
| Bandwidth (kHz) | 5.3297 | 5.2387 | 6.036 | 3.849 | 4.463 |
| Area (µm2) | 781.49 | 746.15 | 425.73 | 369.98 | 513.38 |
| Set 6 | Set 7 | Set 8 | Set 9 | Set 10 | |
| Gain (dB) | 47.884 | 47.8685 | 47.867 | 46.66 | 47.07 |
| Phase (degrees) | 43.938 | 42.285 | 41.763 | 44.643 | 37.552 |
| Noise (µV2/Hz) | 20.567 | 20.557 | 20.55 | 20.472 | 20.413 |
| Power (µW) | 5.20835 | 6.73429 | 6.763 | 3.7032 | 22.984 |
| Bandwidth (kHz) | 4.0079 | 3.849 | 4.00793 | 4.667 | 4.2886 |
| Area (µm2) | 494.26 | 510.89 | 357.55 | 287.24 | 640.042 |
| Metaheuristic Algorithm | ANN-Assisted Goal Attainment Method | |
|---|---|---|
| Gain (dB) | 41.255 | 47.7046 |
| Phase (degrees) | 61.96 | 46.321 |
| Noise (µV2/Hz) | 20.558 | 20.797 |
| Power (µW) | 2.884 | 0.81562 |
| Bandwidth (kHz) | 5.308 | 3.849 |
| Area (µm2) | 773.6955 | 369.98 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Devi, S.; Guha, K.; Jakšić, O.; Baishnab, K.L.; Jakšić, Z. Optimized Design of a Self-Biased Amplifier for Seizure Detection Supplied by Piezoelectric Nanogenerator: Metaheuristic Algorithms versus ANN-Assisted Goal Attainment Method. Micromachines 2022, 13, 1104. https://doi.org/10.3390/mi13071104
Devi S, Guha K, Jakšić O, Baishnab KL, Jakšić Z. Optimized Design of a Self-Biased Amplifier for Seizure Detection Supplied by Piezoelectric Nanogenerator: Metaheuristic Algorithms versus ANN-Assisted Goal Attainment Method. Micromachines. 2022; 13(7):1104. https://doi.org/10.3390/mi13071104
Chicago/Turabian StyleDevi, Swagata, Koushik Guha, Olga Jakšić, Krishna Lal Baishnab, and Zoran Jakšić. 2022. "Optimized Design of a Self-Biased Amplifier for Seizure Detection Supplied by Piezoelectric Nanogenerator: Metaheuristic Algorithms versus ANN-Assisted Goal Attainment Method" Micromachines 13, no. 7: 1104. https://doi.org/10.3390/mi13071104
APA StyleDevi, S., Guha, K., Jakšić, O., Baishnab, K. L., & Jakšić, Z. (2022). Optimized Design of a Self-Biased Amplifier for Seizure Detection Supplied by Piezoelectric Nanogenerator: Metaheuristic Algorithms versus ANN-Assisted Goal Attainment Method. Micromachines, 13(7), 1104. https://doi.org/10.3390/mi13071104