
Performance Improvement of Single-Frequency CW Laser Using a Temperature Controller Based on Machine Learning


Abstract
:
1. Introduction
2. Experiment Design and Theory
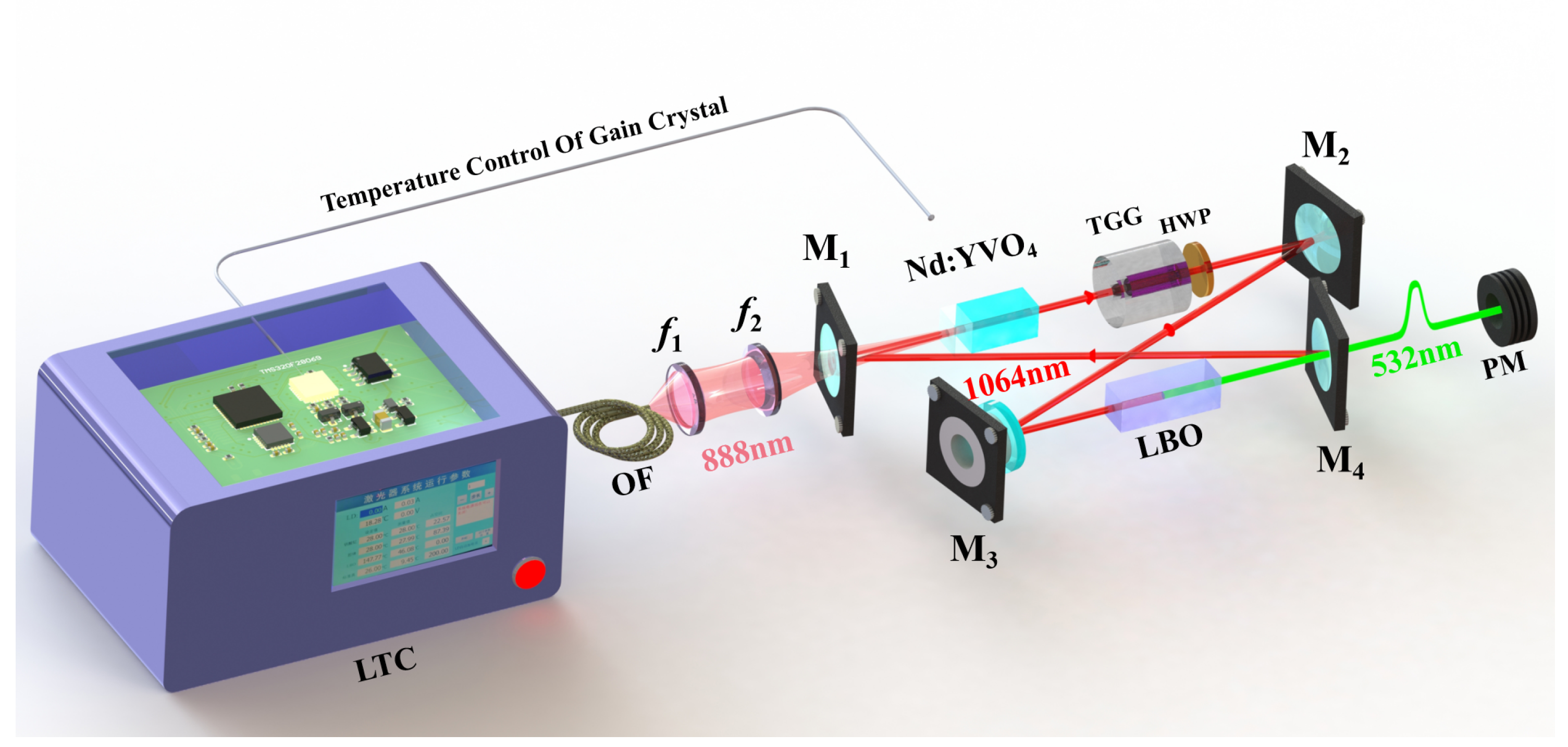
2.1. Experiment Setup
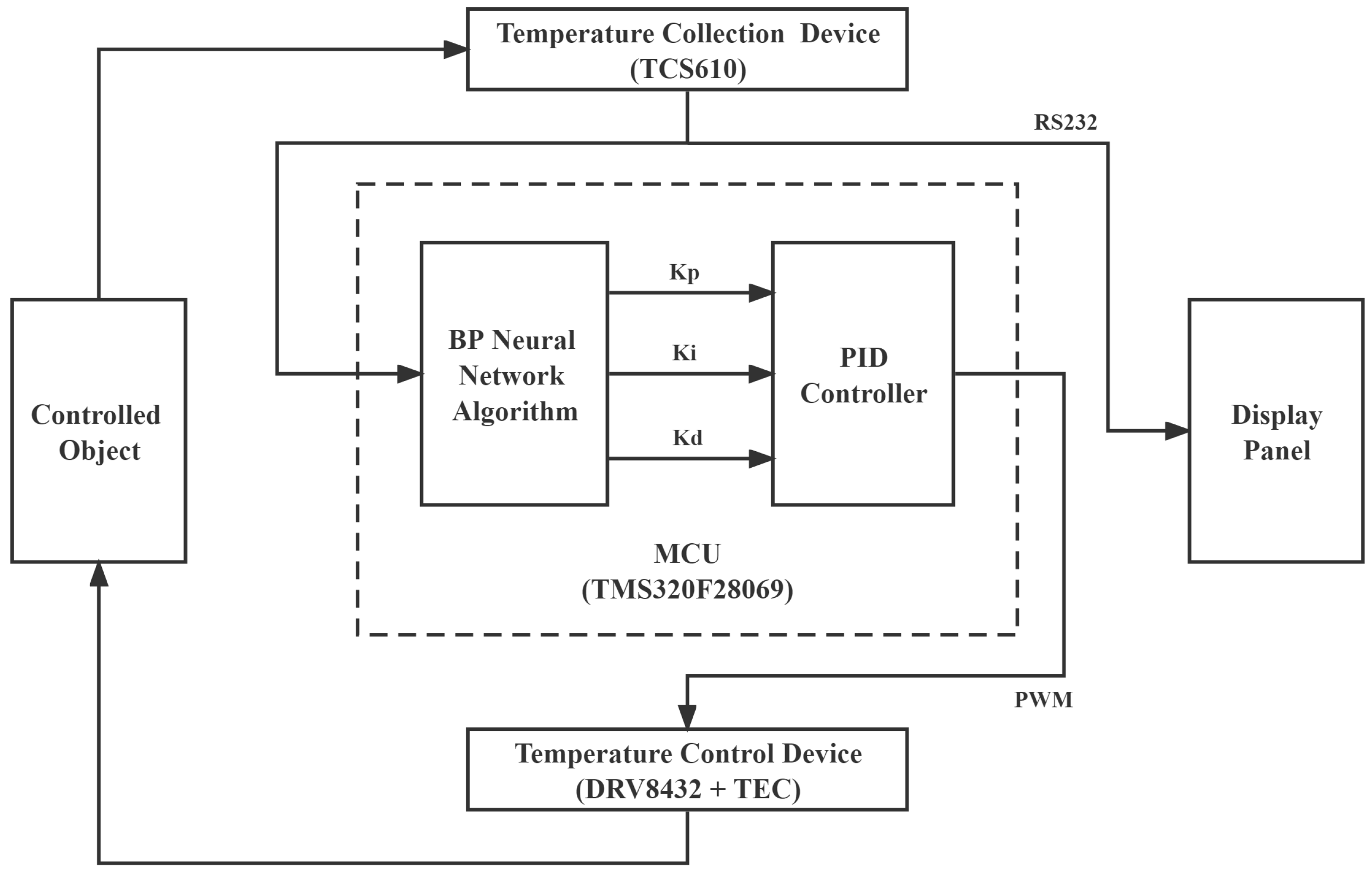
2.2. Design of Laser Temperature Control System
2.3. Theory of BP Neural Network PID
2.4. Design of Parameter Optimizing System
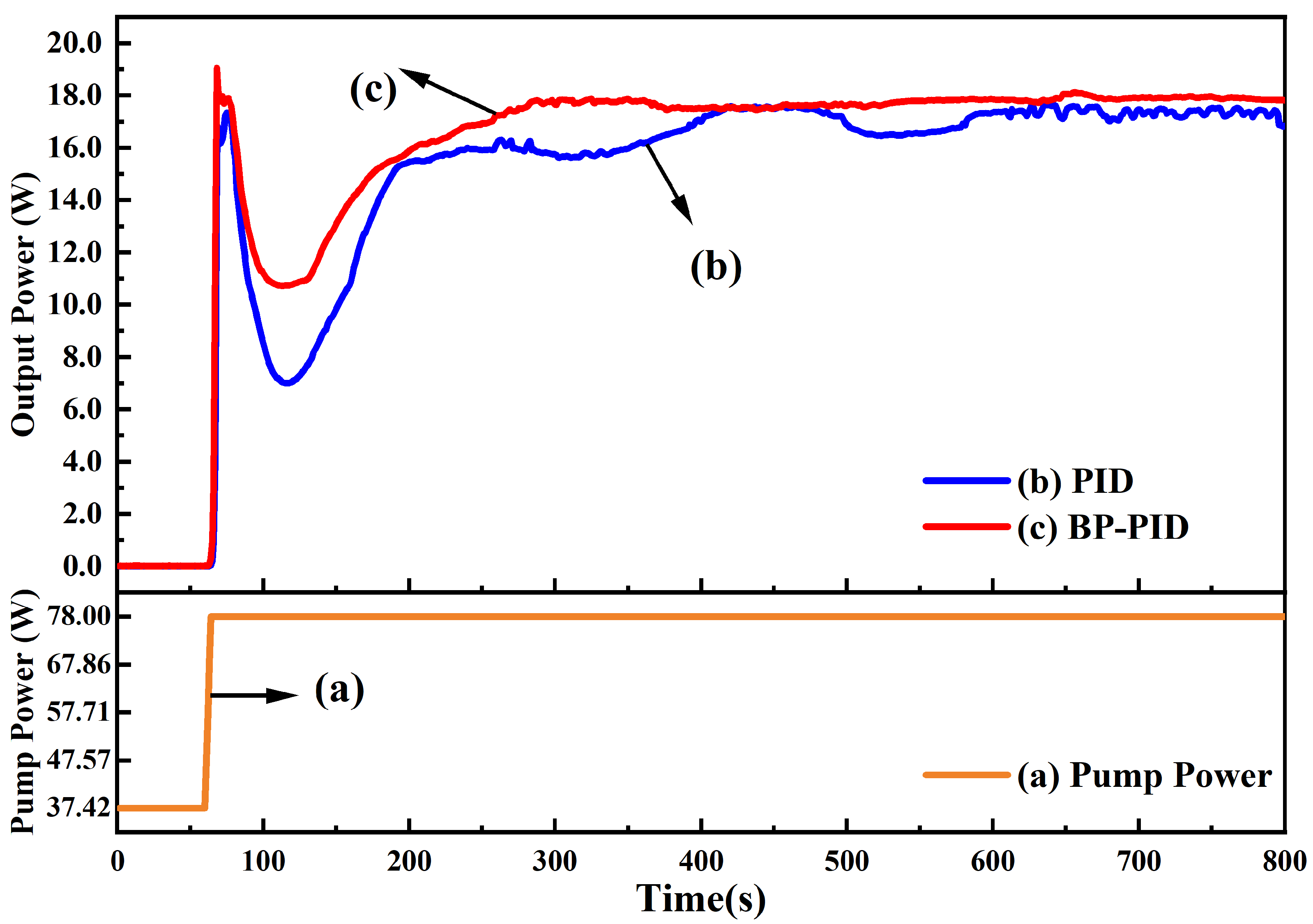
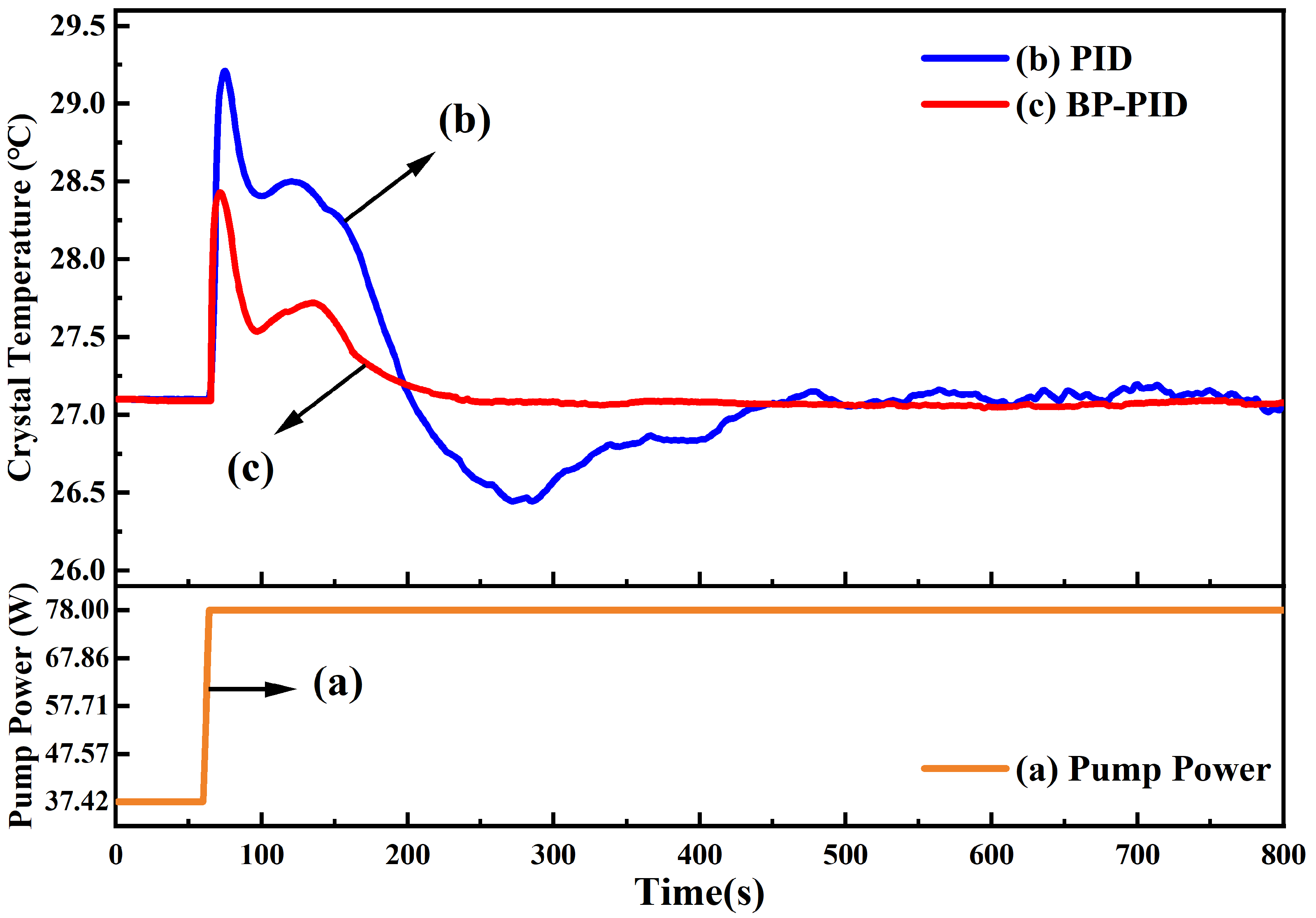
3. Experimental Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jia, X.; Su, X.; Pan, Q.; Gao, J.; Xie, C.; Peng, K. Experimental Demonstration of Unconditional Entanglement Swapping for Continuous Variables. Phys. Rev. Lett. 2004, 93, 250503. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vahlbruch, H.; Mehmet, M.; Chelkowski, S.; Hage, B.; Franzen, A.; Lastzka, N.; Goßler, S.; Danzmann, K.; Schnabel, R. Observation of Squeezed Light with 10-dB Quantum-Noise Reduction. Phys. Rev. Lett. 2008, 100, 033602. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, K.; Chen, H.; Zhang, S.; Shi, Z.; Wang, Y.; Tan, Y. Frequency-Shifted Optical Feedback Measurement Technologies Using a Solid-State Microchip Laser. Appl. Sci. 2019, 9, 109. [Google Scholar] [CrossRef] [Green Version]
- Iizuka, M.; Kariya, M.; Uehara, S.; Nakashima, Y.; Takamatsu, M. Visual appearance effect on modified reconstruction color images of optical Fourier transform hologram by means of digital image processing. In Practical Holography XVII and Holographic Materials IX; Jeong, T.H., Stevenson, S.H., Eds.; International Society for Optics and Photonics, SPIE: Santa Clara, CA, USA, 2003; Volume 5005, pp. 205–216. [Google Scholar]
- Askarani, M.F.; Das, A.; Davidson, J.H.; Amaral, G.C.; Sinclair, N.; Slater, J.A.; Marzban, S.; Thiel, C.W.; Cone, R.L.; Oblak, D.; et al. Long-Lived Solid-State Optical Memory for High-Rate Quantum Repeaters. Phys. Rev. Lett. 2021, 127, 220502. [Google Scholar] [CrossRef] [PubMed]
- Ghany, K.A.; Newishy, M. Cutting of 1.2 mm thick austenitic stainless steel sheet using pulsed and CW Nd:YAG laser. J. Mater. Process. Tech. 2005, 168, 438–447. [Google Scholar] [CrossRef]
- Suder, W.J.; Williams, S. Power factor model for selection of welding parameters in CW laser welding. Opt. Laser Technol. 2014, 56, 223–229. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, X.; Katayama, S. Weld appearance prediction with BP neural network improved by genetic algorithm during disk laser welding. J. Manuf. Syst. 2015, 34, 53–59. [Google Scholar] [CrossRef]
- Masinelli, G.; Le-Quang, T.; Zanoli, S.; Wasmer, K.; Shevchik, S.A. Adaptive Laser Welding Control: A Reinforcement Learning Approach. IEEE Access 2020, 8, 103803–103814. [Google Scholar] [CrossRef]
- Grant-Jacob, J.A.; Xie, Y.; Benita, M.K.; Praeger, M.; Mills, B. Particle and salinity sensing for the marine environment via deep learning using a Raspberry Pi. Environ. Res. Commun. 2019, 1, 035001. [Google Scholar] [CrossRef]
- Larsson, J.; Bood, J.; Xu, C.T.; Yang, X.; Lindberg, R.; Laurell, F.; Brydegaard, M. Atmospheric CO2 sensing using Scheimpflug-lidar based on a 1.57-µm fiber source. Opt. Express 2019, 27, 17348–17358. [Google Scholar] [CrossRef]
- Jin, P.; Lu, H.; Su, J.; Peng, K. Scheme for improving laser stability via feedback control of intracavity nonlinear loss. Appl. Opt. 2016, 55, 3478. [Google Scholar] [CrossRef] [PubMed]
- Peng, W.; Jin, P.; Li, F.; Su, J.; Lu, H.; Peng, K. A Review of the High-Power All-Solid-State Single-Frequency Continuous-Wave Laser. Micromachines 2021, 12, 1426. [Google Scholar] [CrossRef] [PubMed]
- Drever, R.; Hall, J.L.; Kowalski, F.V.; Hough, J.; Ward, H. Laser Phase and Frequency Stabilization Using an Optical Resonator. Appl. Phys. B 1983, 31, 97–105. [Google Scholar] [CrossRef]
- Hardman, P.J.; Clarkson, W.A.; Friel, G.J.; Pollnau, M.; Hanna, D. Energy-transfer upconversion and thermal lensing in high-power end-pumped Nd:YLF laser crystals. IEEE J. Quantum Electron. 1999, 35, 647–655. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Yang, W.; Zhou, H.; Huo, M.; Zhen, Y. Temperature dependence of the fractional thermal load of Nd:YVO4 at 1064 nm lasing and its influence on laser performance. Opt. Express 2013, 21, 18068–18078. [Google Scholar] [CrossRef] [Green Version]
- Hecht-Nielsen, R. Theory of the backpropagation neural network. Neural Netw. 1988, 1, 445. [Google Scholar] [CrossRef]
- Ortega, R.; Romero, J.G.; Borja, P.; Donaire, A. Motivation and Basic Construction of PID Passivity-Based Control. In PID Passivity-Based Control of Nonlinear Systems with Applications; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2021; pp. 5–13. [Google Scholar]
- Mcculloch, W.S.; Pitts, W. A Logical Calculus of the Ideas Immanent in Nervous Activity. Biol. Math. Biophys. 1943, 5, 115–133. [Google Scholar] [CrossRef]
- Rumelhart, D.; Hinton, G.; Williams, R. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Dally, W.J.; Keckler, S.W.; Kirk, D.B. Evolution of the Graphics Processing Unit (GPU). IEEE Micro 2021, 41, 42–51. [Google Scholar] [CrossRef]
- Li, H.; Wu, Y.; Chen, M. Adaptive Fault-Tolerant Tracking Control for Discrete-Time Multiagent Systems via Reinforcement Learning Algorithm. IEEE Trans. Cybern. 2020, 51, 1163–1174. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Nguyen, N.D.; Nahavandi, S. Deep Reinforcement Learning for Multiagent Systems: A Review of Challenges, Solutions, and Applications. IEEE Trans. Cybern. 2020, 50, 3826–3839. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, B.; Han, S.; Xiao, J.; Hu, X.; Fan, J. Error compensation based on BP neural network for airborne laser ranging. Opt.-Int. J. Light Electron Opt. 2016, 127, 4083–4088. [Google Scholar] [CrossRef]
- Degrave, J.; Felici, F.; Buchli, J. Magnetic control of tokamak plasmas through deep reinforcement learning. Nature 2022, 602, 414–419. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Yong, Y.; Li, J.; Fang, W. PID Control in the Reactor Temperature Control System Based on BP Neural Network. J. Alloys Compd. 2009, 485, 192–195. [Google Scholar]
- McDonagh, L.; Wallenstein, R.; Knappe, R.; Nebel, A. High-efficiency 60 W TEM(00) Nd:YVO(4) oscillator pumped at 888 nm. Opt. Lett. 2006, 31, 3297–3299. [Google Scholar] [CrossRef]
- Guo, Y.; Xu, M.; Peng, W.; Su, J.; Peng, K. Realization of a 101 W single-frequency continuous wave all-solid-state 1064 nm laser by means of mode self-reproduction. Opt. Lett. 2018, 43, 6017. [Google Scholar] [CrossRef] [Green Version]
- Kondoh, S.; Shimabukuro, A.; Umeda, Y. Development of Modular Design Method for Inverse Manufacturing. In Proceedings of the 2005 4th International Symposium on Environmentally Conscious Design and Inverse Manufacturing, Tokyo, Japan, 12–14 December 2005; pp. 177–183. [Google Scholar]
- Zhou, G.; Birdwell, J. PID autotuner design using machine learning. In Proceedings of the IEEE Symposium on Computer-Aided Control System Design, Napa, CA, USA, 17–19 March 1992; pp. 173–179. [Google Scholar]
- Jain, L.C.; Seera, M.; Lim, C.P.; Balasubramaniam, P. A review of online learning in supervised neural networks. Neural Comput. Appl. 2014, 25, 491–509. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Increasing the Pump Power to Optimal Operation Point | |||||
|---|---|---|---|---|---|---|
| Variation of the Laser Power | Variation of the Crystal Temperature | |||||
| Maximum | Minimum | Time | Maximum | Minimum | Time | |
| PID | 17.65 W | 6.99 W | 740 s | 29.20 °C | 26.44 °C | 400 s |
| BP-PID | 19.04 W | 10.74 W | 240 s | 28.40 °C | 27.10 °C | 200 s |
| Experiment | Changing the Crystal Temperature Set Value | Stability of the Output Power (2 h) | ||||
| Decrease (−1 °C) | Increase (+1 °C) | |||||
| Overshoot | Time | Overshoot | Time | |||
| PID | 0.1 °C | >300 s | 0.1 °C | >300 s | ±0.51% | |
| BP-PID | <0.01 °C | <50 s | <0.01 °C | <50 s | ±0.36% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, H.; Peng, W.; Jin, P.; Su, J.; Lu, H. Performance Improvement of Single-Frequency CW Laser Using a Temperature Controller Based on Machine Learning. Micromachines 2022, 13, 1047. https://doi.org/10.3390/mi13071047
Qiao H, Peng W, Jin P, Su J, Lu H. Performance Improvement of Single-Frequency CW Laser Using a Temperature Controller Based on Machine Learning. Micromachines. 2022; 13(7):1047. https://doi.org/10.3390/mi13071047
Chicago/Turabian StyleQiao, Haoming, Weina Peng, Pixian Jin, Jing Su, and Huadong Lu. 2022. "Performance Improvement of Single-Frequency CW Laser Using a Temperature Controller Based on Machine Learning" Micromachines 13, no. 7: 1047. https://doi.org/10.3390/mi13071047
APA StyleQiao, H., Peng, W., Jin, P., Su, J., & Lu, H. (2022). Performance Improvement of Single-Frequency CW Laser Using a Temperature Controller Based on Machine Learning. Micromachines, 13(7), 1047. https://doi.org/10.3390/mi13071047