
Efficient and Secure WiFi Signal Booster via Unmanned Aerial Vehicles WiFi Repeater Based on Intelligence Based Localization Swarm and Blockchain
 ,
,  ,
,  , , and
, , and 
Abstract
1. Introduction
- We used UAVs equipped with a thermal camera and signal repeater to identify persons in a specific area and boost the wireless signal in this specific area. The procedure of requesting help through UAVs starts with recognizing indicators in specific regions that will be a gathering point for the people who need help in the case of a request for assistance. UAV cameras employ vision processing technology to recognize the help requesting indicators.
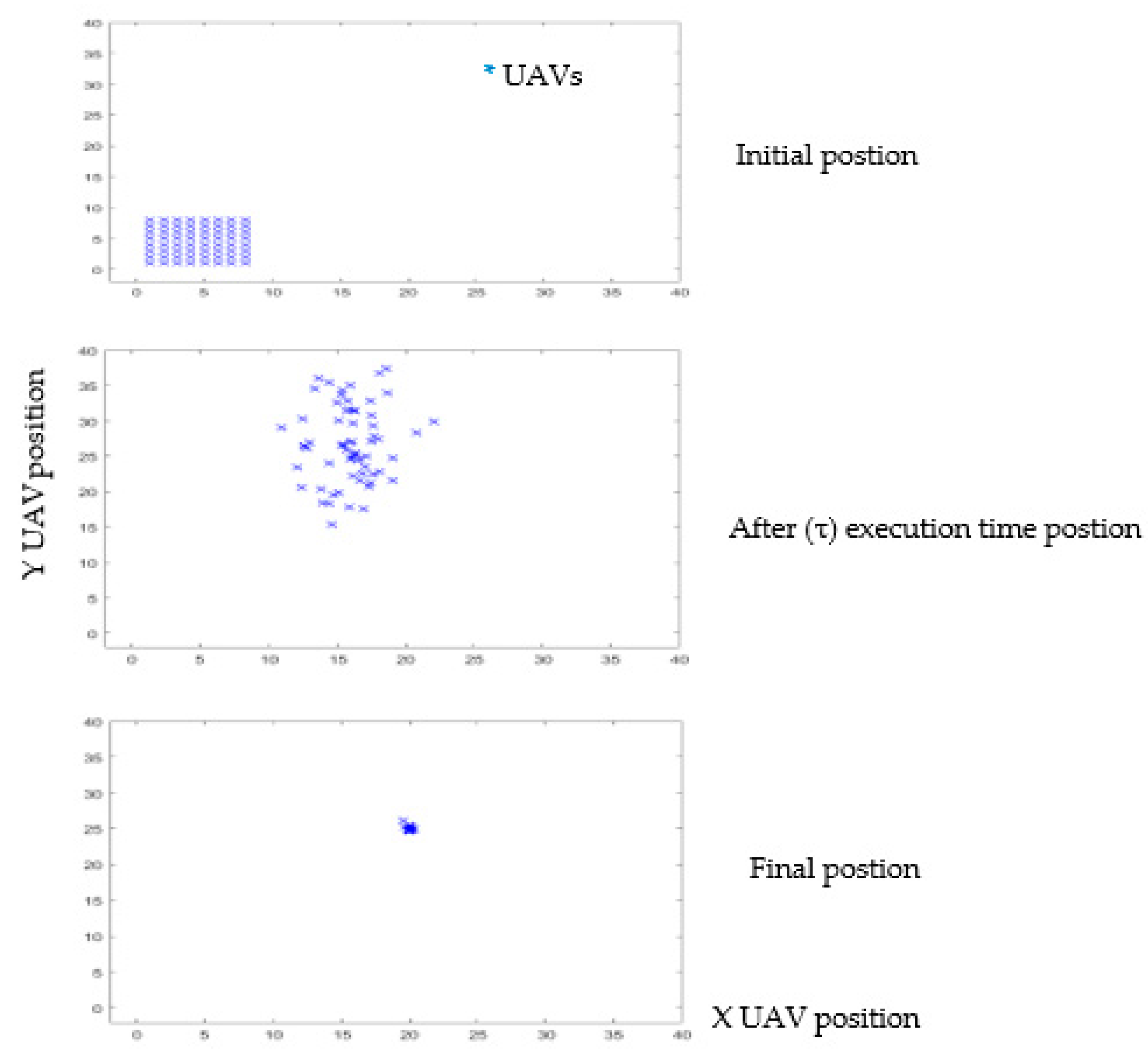
- The UAVs localization and clusterization scenario is optimized using a swarm intelligence localization (SIL) algorithm.
- To secure data transmission, blockchain decentralized data is used.
2. Related Work
3. Preliminaries
- The UAVs could be used to boost wireless signals in far cities during emergency cases.
- The swarm is an ideal solution to the localization problem.
- Blockchain technology is an appropriate data sharing technology for decentralization advantages.
- SIL and blockchain could work together to ensure a synchronized signal booster.
3.1. Swarm Intelligence-Based Localization (SIL)
3.2. Computational Complexity

3.3. Blockchain: Decentralization of Big Data
- All nodes are supposed to have the same output.
- All non-fault nodes have a value.
- There is resistance during recovery of the failure node.
- Blocks in the blockchain network regularly search for self-audit every 10 s [48].
4. Proposed System Implementation
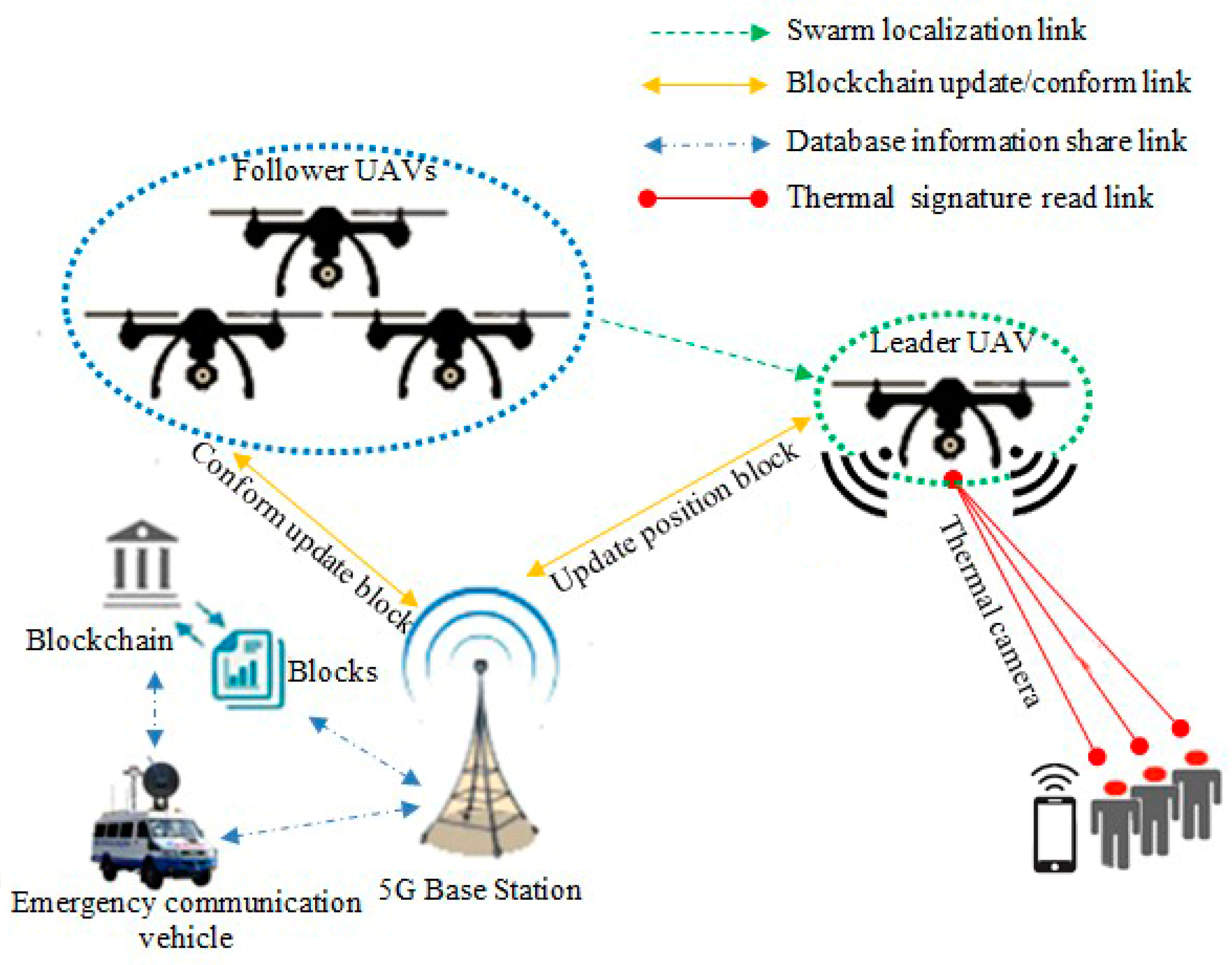
- Network layer: In the network layer, UAVs are divided into leader-UAV and follower-UAVs. In the case where a drone investigated and found a weak wireless signal, the drone becomes a leader-UAV and broadcasts its position in swarm space. Then, the leader-UAV interacts with other UAVs, who become follower-UAVs. During the contact, the follower-UAVs affirm reception of the location of the leader-UAV. At the same time, follower-UAVs coordinate with each other using the SIL swarm technique to travel into the weak signal zone. UAVs boost the signal region after the operation. A decentralization database is a secure connection database between UAV swarms.
- Blockchain layer: The blockchain layer is responsible for protecting all transactions preserved by block actors within the UAV structure in the blockchain layer. In particular, the UAV block is created within the platform program. Both blocks are free to gather data in the blockchain from the leader-UAV block after modifying the location information and upgrading their inside block hash tables. Each UAV block in the blockchain network creates a Merkle tree that depends on the number of transactions. The transections here show the data on velocity and position. Within the umbrella of the blockchain, the evolved version of the Ethereum protocol from the point of view of decentralization selectivity, Gj(t) is picked as the best-chosen position for UAVs swarm, and Pij(t) is the best position for a particular UAV; Gj(t) and Pij(t) together determine which UAV token to transfer.

UAV Network Architecture
| Algorithm 1. Localization and clustering |
| Input: S, Vij(t), Xij(t), W, C1, 2, R1, 2, N, K. |
| Output:Pij(t), Gj(t), Vij(t + 1), Xij(t + 1). |
| /* Initialization*/ //Generate the initial S, Vij(t), and Xij(t) of dimensions where each particle’s position and velocity are randomly generated in the searching space. 1: Initialize S, W, Vij(t) 2: for ∀ UAVs ∈ S (1≤ i ≤ N) do 3: Initial Xij(t) 4: end for |
| /* Leader-UAV*/ //Generate the target position and velocity in the searching space. 5: If the thermal signature (is true) then 6: UAV position send to update in blockchain 7: end if |
| /* Main loop*/ 8: while (Stopping criteria (false)) do 9: for each k do |
| /* Computation*/ //Calculate the suitable position for follower-UAV Xij(t + 1) by using current Xij(t) and Vij(t + 1) = {Pij(t), Gj(t)} based on Equations (1) and (5). 10:Calculate Vij(t + 1) using Equation (1) 11:if Vij(t + 1) > Vmax then 12:Set Vij(t + 1) = Vmax 13:end if 14:if Vij(t + 1) ≤ Vmax then 15:Set Vij(t + 1) = Vmin 16:end if |
| /* Blockchain*/ //Update the velocity and position of the current generation. 17:for ∀ UAVs ∈ S (1≤ i ≤ N) do 18:Update ∀ 10 sec the position Xij(t + 1) and Pij(t) 19:Conform receive all hash UAVs updated position 20:end for |
| /* Output*/ //Private best position Pij(t) for UAV, Global best position Gj(t) for swarm, next velocity Vij(t + 1), next position Xij(t + 1). 21:Calculate Pij(t), Gj(t), Vij(t + 1), Xij(t + 1). 22:the end for 23:end while |
5. Results
6. Performance Analysis
6.1. Localization Analysis and Discussion
6.2. Security Analysis and Discussion
6.3. Blockchain Threat Modeling
7. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qubaa, A.R.; Hamdon, A.N.; Al Jawwadi, T.A. Morphology Detection in Archaeological Ancient Sites by Using UAVs/Drones Data and GIS techniques. Iraqi J. Sci. 2021, 62, 4557–4570. [Google Scholar] [CrossRef]
- Zeng, Y.; Wu, Q.; Zhang, R. Accessing from the Sky: A Tutorial on UAV Communications for 5G and beyond. Proc. IEEE 2019, 107, 2327–2375. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; Di, B.; Song, L. Cellular UAV-to-X Communications: Design and Optimization for Multi-UAV Networks. IEEE Trans. Wirel. Commun. 2019, 18, 1346–1359. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV cellular communications: Practical aspects, standardization advancements, regulation, and security challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef]
- Nguyen, L.D.; Nguyen, K.K.; Kortun, A.; Duong, T.Q. Real-time deployment and resource allocation for distributed UAV systems in disaster relief. In Proceedings of the 2019 IEEE 20th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Cannes, France, 2–5 July 2019; pp. 1–5. [Google Scholar]
- Zhao, N.; Lu, W.; Sheng, M.; Chen, Y.; Tang, J.; Yu, F.R.; Wong, K.-K. UAV-Assisted Emergency Networks in Disasters. IEEE Wirel. Commun. 2019, 26, 45–51. [Google Scholar] [CrossRef]
- Dormehl, L. Using Drones to Detect Coronavirus isn’t as Crazy as it Sounds. Digital Trends, 22 February 2020. Available online: https://www.digitaltrends.com/cool-tech/draganfly-drone-coronavirus/ (accessed on 5 July 2020).
- Perry, T. Facebook Aims to Remake Telecom with Millimeter Waves and Tether Tennis. IEEE Spectrum, 19 April 2017. [Google Scholar]
- Kaur, S.; Randhawa, S. Google LOON: Balloon-powered internet for everyone. AIP Conf. Proc. 2018, 2034, 020006. [Google Scholar]
- Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S.; Hassan, J.; Alhartomi, M.A.; Shvetsova, S.V.; Sahal, R.; Hawbani, A. Computing in the Sky: A Survey on Intelligent Ubiquitous Computing for UAV-Assisted 6G Networks and Industry 4.0/5.0. Drones 2022, 6, 177. [Google Scholar] [CrossRef]
- Gangula, R.; Esrafilian, O.; Gesbert, D.; Roux, C.; Kaltenberger, F.; Knopp, R. Flying robots: First results on an autonomous UAV-based LTE relay using open air interface. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar]
- Liao, X.; Xu, C.; Yue, H. Enable UAVs safely flight in low-altitude: A Preliminary research of the public air route network of UAVs. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 959–964. [Google Scholar]
- Lin, H. 5G Improved Cloud Service Experience and Promotes the Data Collection for Big Data Analysis. In Advances in Computer Science Research, Proceedings of the 2019 International Conference on Mathematics, Big Data Analysis and Simulation and Modelling (MBDASM 2019), Changsha, China, 30–31 August 2019; Atlantis Press: Amsterdam, The Netherlands, 2019; pp. 174–177. [Google Scholar]
- Xu, Y.; Pan, L.; Du, C.; Li, J.; Jing, N.; Wu, J. Vision-based UAVs aerial image localization: A survey. In Proceedings of the 2nd ACM SIGSPATIAL International Workshop on AI for Geographic Knowledge Discovery, Seattle, WA, USA, 6 November 2018; pp. 9–18. [Google Scholar]
- Walter, V.; Staub, N.; Saska, M.; Franchi, A. Mutual Localization of UAVs based on Blinking Ultraviolet Markers and 3D Time-Position Hough Transform. In Proceedings of the 2018 IEEE 14th International Conference on Automation Science and Engineering (CASE), Munich, Germany, 20–24 August 2018; pp. 298–303. [Google Scholar] [CrossRef]
- Walter, V.; Saska, M.; Franchi, A. Fast Mutual Relative Localization of UAVs using Ultraviolet LED Markers. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 1217–1226. [Google Scholar]
- Walter, V.; Staub, N.; Franchi, A.; Saska, M. Uvdar system for visual relative localization with application to leader-follower formations of multirotor UAVs. IEEE Robot. Autom. Lett. 2019, 4, 2637–2644. [Google Scholar] [CrossRef]
- Nguyen, T.-M.; Qiu, Z.; Cao, M.; Nguyen, T.H.; Xie, L. An integrated localization-navigation scheme for distance-based docking of UAVs. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 5245–5250. [Google Scholar]
- Qu, Y.; Zhang, F.; Wu, X.; Xiao, B. Cooperative geometric localization for a ground target based on the relative distances by multiple UAVs. Sci. China Inf. Sci. 2018, 62, 10204. [Google Scholar] [CrossRef]
- Khelifi, F.; Bradai, A.; Singh, K.; Atri, M. Localization and Energy-Efficient Data Routing for Unmanned Aerial Vehicles: Fuzzy-Logic-Based Approach. IEEE Commun. Mag. 2018, 56, 129–133. [Google Scholar] [CrossRef]
- Dobrev, Y.; Dobrev, Y.; Gulden, P.; Lipka, M.; Pavlenko, T.; Moormann, D.; Vossiek, M. Radar-based high-accuracy 3D localization of UAVs for landing in GNSS-denied environments. In Proceedings of the 2018 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Munich, Germany, 15–17 April 2018; pp. 1–4. [Google Scholar]
- Guerra, A.; Sparnacci, N.; Dardari, D.; Djurić, P.M. Collaborative target-localization and information-based control in networks of UAVs. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar]
- Dardari, G.D.; Djurić, P.M. Joint indoor localization and navigation of UAVs for network formation control. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 13–19. [Google Scholar]
- Alsamhi, S.H.; Shvetsov, A.V.; Shvetsova, S.V.; Hawbani, A.; Guizan, M.; Alhartomi, M.A.; Ma, O. Blockchain-Empowered Security and Energy Efficiency of Drone Swarm Consensus for Environment Exploration. IEEE Trans. Green Commun. Netw. 2022, 1. [Google Scholar] [CrossRef]
- Islam, A.; Rahim, T.; Masuduzzaman, M.; Shin, S.Y. A Blockchain-Based Artificial Intelligence-Empowered Contagious Pandemic Situation Supervision Scheme Using Internet of Drone Things. IEEE Wirel. Commun. 2021, 28, 166–173. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Afghah, F.; Hawbani, A.; Shvetsov, A.V.; Lee, B.; Song, H. Drones’ edge intelligence over smart en-vironments in b5g: Blockchain and federated learning synergy. IEEE Trans. Green Commun. Netw. 2021, 6, 295–312. [Google Scholar] [CrossRef]
- Islam, A.; Al Amin, A.; Shin, S.Y. FBI: A Federated Learning-Based Blockchain-Embedded Data Accumulation Scheme Using Drones for Internet of Things. IEEE Wirel. Commun. Lett. 2022, 11, 972–976. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile Unmanned Aerial Vehicles (UAVs) for Energy-Efficient Internet of Things Communications. IEEE Trans. Wirel. Commun. 2017, 16, 7574–7589. [Google Scholar] [CrossRef]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Shah, N.S.; Alsamhi, S.H.; Abdullah, Q. Energy-efficient tethered UAV deployment in B5G for smart environments and disaster recovery. In Proceedings of the 2021 1st International Conference on Emerging Smart Technologies and Applications (eSmarTA), Sana’a, Yemen, 10–12 August 2021; pp. 1–5. [Google Scholar]
- Alsamhi, S.H.; Almalki, F.A.; Al-Dois, H.; Shvetsov, A.V.; Ansari, M.S.; Hawbani, A.; Gupta, S.K.; Lee, B. Multi-Drone Edge Intelligence and SAR Smart Wearable Devices for Emergency Communication. Wirel. Commun. Mob. Comput. 2021, 2021, 6710074. [Google Scholar] [CrossRef]
- Zhong, X.; Huo, Y.; Dong, X.; Liang, Z. Deep Q-network based dynamic movement strategy in a UAV-Assisted network. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–6. [Google Scholar]
- Fernández-Caramés, T.M.; Blanco-Novoa, O.; Froiz-Míguez, I.; Fraga-Lamas, P. Towards an autonomous industry 4.0 warehouse: A UAV and blockchain-based system for inventory and traceability applications in big data-driven supply chain management. Sensors 2019, 19, 2394. [Google Scholar] [CrossRef]
- Kapitonov, A.; Lonshakov, S.; Krupenkin, A.; Berman, I. Blockchain-based protocol of autonomous business activity for mul-ti-agent systems consisting of UAVs. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linköping, Sweden, 3–5 October 2017; pp. 84–89. [Google Scholar]
- Lv, Z.; Chen, D.; Feng, H.; Zhu, H.; Lv, H. Digital Twins in Unmanned Aerial Vehicles for Rapid Medical Resource Delivery in Epidemics. IEEE Trans. Intell. Transp. Syst. 2021, 1–9. [Google Scholar] [CrossRef]
- Cao, B.; Li, M.; Liu, X.; Zhao, J.; Cao, W.; Lv, Z. Many-Objective Deployment Optimization for a Drone-Assisted Camera Network. IEEE Trans. Netw. Sci. Eng. 2021, 8, 2756–2764. [Google Scholar] [CrossRef]
- Mao, S.; He, S.; Wu, J. Joint UAV position optimization and resource scheduling in space-air-ground in-tegrated networks with mixed cloud-edge computing. IEEE Syst. J. 2020, 15, 3992–4002. [Google Scholar] [CrossRef]
- Cao, B.; Sun, Z.; Zhang, J.; Gu, Y. Resource Allocation in 5G IoV Architecture Based on SDN and Fog-Cloud Computing. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3832–3840. [Google Scholar] [CrossRef]
- Sun, Q.; Lin, K.; Si, C.; Xu, Y.; Li, S.; Gope, P. A Secure and Anonymous Communicate Scheme over the Internet of Things. ACM Trans. Sens. Netw. 2022, 18, 1–21. [Google Scholar] [CrossRef]
- Wu, X.; Zheng, W.; Chen, X.; Zhao, Y.; Yu, T.; Mu, D. Improving high-impact bug report prediction with combination of interactive machine learning and active learning. Inf. Softw. Technol. 2021, 133, 106530. [Google Scholar] [CrossRef]
- Hu, Y.; Qing, J.X.; Liu, Z.H.; Conrad, Z.J.; Cao, J.N.; Zhang, X.P. Hovering efficiency optimization of the ducted propeller with weight penalty taken into account. Aerosp. Sci. Technol. 2021, 117, 106937. [Google Scholar] [CrossRef]
- Shi, Y.; Wu, J.; Liu, L.; Lan, D.; Taherkordi, A. Energy-Aware Relay Optimization and Power Allocation in Multiple Unmanned Aerial Vehicles Aided Satellite-Aerial-Terrestrial Network. IEEE Syst. J. 2022, 1–12. [Google Scholar] [CrossRef]
- Zhou, G.; Bao, X.; Ye, S.; Wang, H.; Yan, H. Selection of Optimal Building Facade Texture Images From UAV-Based Multiple Oblique Image Flows. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1534–1552. [Google Scholar] [CrossRef]
- Xu, L.; Liu, X.; Tong, D.; Liu, Z.; Yin, L.; Zheng, W. Forecasting Urban Land Use Change Based on Cellular Automata and the PLUS Model. Land 2022, 11, 652. [Google Scholar] [CrossRef]
- Han, Y.; Wang, B.; Guan, T.; Tian, D.; Yang, G.; Wei, W.; Tang, H.; Chuah, J.H. Research on Road Environmental Sense Method of Intelligent Vehicle Based on Tracking Check. IEEE Trans. Intell. Transp. Syst. 2022, 1–15. [Google Scholar] [CrossRef]
- Singh, P.; Khosla, A.; Kumar, A.; Khosla, M. Optimized localization of target nodes using single mobile anchor node in wireless sensor network. AEU—Int. J. Electron. Commun. 2018, 91, 55–65. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Localization and Clustering Based on Swarm Intelligence in UAV Networks for Emergency Communications. IEEE Internet Things J. 2019, 6, 8958–8976. [Google Scholar] [CrossRef]
- Joshi, A.P.; Han, M.; Wang, Y. A survey on security and privacy issues of blockchain technology. Math. Found. Comput. 2018, 1, 121–147. [Google Scholar] [CrossRef]
- Lin, I.-C.; Liao, T.-C. A survey of Blockchain security issues and challenges. Int. J. Netw. Secur. 2017, 19, 653–659. [Google Scholar]
- Explore Windows 10 OS, Computers, Apps, & More—Microsoft Windows. Available online: https://www.microsoft.com/en-us/windows (accessed on 16 July 2020).
- Zheng, Z.; Xie, S.; Dai, H.; Chen, X.; Wang, H. An overview of Blockchain technology: Architecture, consensus, and future trends. In Proceedings of the 2017 IEEE International Congress on Big Data (BigData Congress), Honolulu, HI, USA, 25–30 July 2017; pp. 557–564. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Limitation |
|---|---|
| [8,9,10,11,12] |
|
| [13,14,15,16,17,18,19,20,21,22,23,24,25] |
|
| Parameter | Value |
|---|---|
| Network simulator | MATLAB |
| Network area | 1000 × 1000 m |
| UAV transmission range | 250–300 m |
| Swarm size | 64 |
| Correction factor | 2 |
| Inertia | 1 |
| Number of leader-UAVs | 1 |
| Number of follower-UAVs | 63 |
| Number of blocks | 64 |
| Localization algorithm | SIL |
| Clustering protocol | Blockchain |
| Maximum number of iterations | 50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amran, G.A.; Wang, S.; Al-qaness, M.A.A.; Mohsan, S.A.H.; Abbas, R.; Ghaleb, E.; Alshathri, S.; Abd Elaziz, M. Efficient and Secure WiFi Signal Booster via Unmanned Aerial Vehicles WiFi Repeater Based on Intelligence Based Localization Swarm and Blockchain. Micromachines 2022, 13, 1924. https://doi.org/10.3390/mi13111924
Amran GA, Wang S, Al-qaness MAA, Mohsan SAH, Abbas R, Ghaleb E, Alshathri S, Abd Elaziz M. Efficient and Secure WiFi Signal Booster via Unmanned Aerial Vehicles WiFi Repeater Based on Intelligence Based Localization Swarm and Blockchain. Micromachines. 2022; 13(11):1924. https://doi.org/10.3390/mi13111924
Chicago/Turabian StyleAmran, Gehad Abdullah, Shuang Wang, Mohammed A. A. Al-qaness, Syed Agha Hassnain Mohsan, Rizwan Abbas, Eissa Ghaleb, Samah Alshathri, and Mohamed Abd Elaziz. 2022. "Efficient and Secure WiFi Signal Booster via Unmanned Aerial Vehicles WiFi Repeater Based on Intelligence Based Localization Swarm and Blockchain" Micromachines 13, no. 11: 1924. https://doi.org/10.3390/mi13111924
APA StyleAmran, G. A., Wang, S., Al-qaness, M. A. A., Mohsan, S. A. H., Abbas, R., Ghaleb, E., Alshathri, S., & Abd Elaziz, M. (2022). Efficient and Secure WiFi Signal Booster via Unmanned Aerial Vehicles WiFi Repeater Based on Intelligence Based Localization Swarm and Blockchain. Micromachines, 13(11), 1924. https://doi.org/10.3390/mi13111924