

A Hydrogel-Based Self-Sensing Underwater Actuator

 ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Fabrication of Hydraulic Hydrogel Actuators
2.3. Mechanical Properties and Test Methods of Hydrogels
2.4. Experimental Platform Setup
2.5. Finite-Element Analysis (FEA) Simulation
3. Results
3.1. Characteristics of Actuation
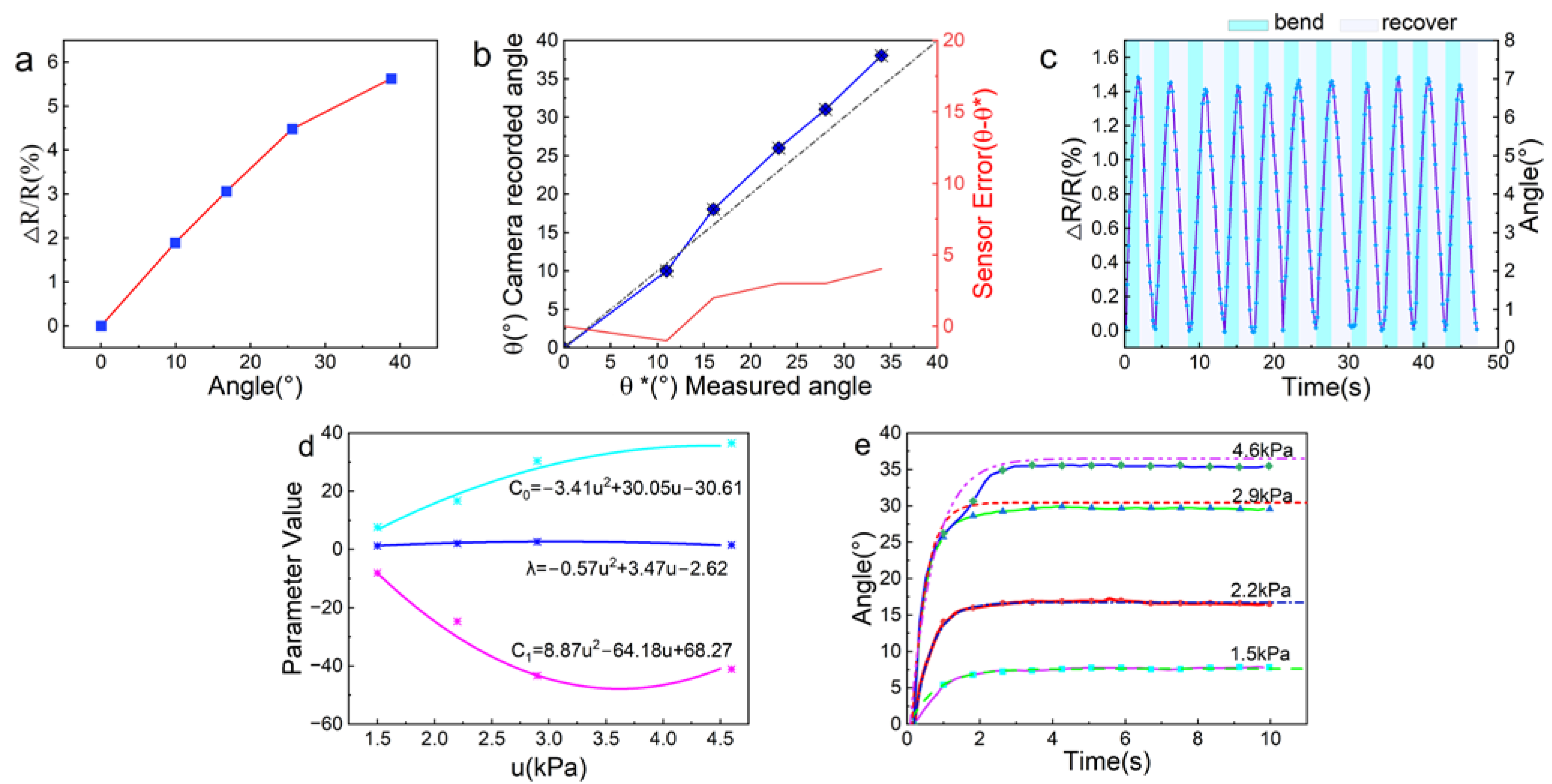
3.2. Self-Sensing Characterization
3.3. Dynamic System Modeling
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef]
- Ng, C.S.X.; Lum, G.Z. Untethered Soft Robots for Future Planetary Explorations? Adv. Intell. Syst. 2021, 2100106. [Google Scholar] [CrossRef]
- Ionov, L. Hydrogel-based actuators: Possibilities and limitations. Mater. Today 2014, 17, 494–503. [Google Scholar] [CrossRef]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef] [PubMed]
- Palleau, E.; Morales, D.; Dickey, M.D.; Velev, O.D. Reversible patterning and actuation of hydrogels by electrically assisted ionoprinting. Nat. Commun. 2013, 4, 2257. [Google Scholar] [CrossRef] [PubMed]
- Yuk, H.; Lin, S.; Ma, C.; Takaffoli, M.; Fang, N.X.; Zhao, X. Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water. Nat. Commun. 2017, 8, 14230. [Google Scholar] [CrossRef]
- Lee, Y.; Song, W.J.; Sun, J.Y. Hydrogel soft robotics. Mater. Today Phys. 2020, 15, 100258. [Google Scholar] [CrossRef]
- Kim, Y.; Liu, M.; Ishida, Y.; Ebina, Y.; Osada, M.; Sasaki, T.; Hikima, T.; Takata, M.; Aida, T. Thermoresponsive actuation ena-bled by permittivity switching in an electrostatically anisotropic hydrogel. Nat. Mater. 2015, 14, 1002–1007. [Google Scholar] [CrossRef]
- Ma, C.; Le, X.; Tang, X.; He, J.; Xiao, P.; Zheng, J.; Xiao, H.; Lu, W.; Zhang, J.; Huang, Y.; et al. A Multiresponsive Anisotropic Hydrogel with Macroscopic 3D Complex Deformations. Adv. Funct. Mater. 2016, 26, 8670–8676. [Google Scholar] [CrossRef]
- Cheng, Y.; Ren, K.; Yang, D.; Wei, J. Bilayer-type fluorescence hydrogels with intelligent response serve as temperature/pH driven soft actuators. Sens. Actuators B Chem. 2017, 255, 3117–3126. [Google Scholar] [CrossRef]
- Iwaso, K.; Takashima, Y.; Harada, A. Fast response dry-type artificial molecular muscles with [c2]daisy chains. Nat. Chem. 2016, 8, 625–632. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Xu, X.; Chen, L.; Zhang, C.; Liao, L. Multi-responsive hydrogel actuator with photo-switchable color changing behaviors. Dye. Pigment. 2019, 174, 108042. [Google Scholar] [CrossRef]
- Zhao, Y.; Xuan, C.; Qian, X.; Alsaid, Y.; Hua, M.; Jin, L.; He, X. Soft phototactic swimmer based on self-sustained hydrogel oscillator. Sci. Robot. 2019, 4, aax7112. [Google Scholar] [CrossRef]
- Han, D.; Farino, C.; Yang, C.; Scott, T.; Browe, D.; Choi, W.; Freeman, J.W.; Lee, H. Soft Robotic Manipulation and Locomotion with a 3D Printed Electroactive Hydrogel. ACS Appl. Mater. Interfaces 2018, 10, 17512–17518. [Google Scholar] [CrossRef]
- Migliorini, L.; Santaniello, T.; Yan, Y.; Lenardi, C.; Milani, P. Low-voltage electrically driven homeostatic hydrogel-based actuators for underwater soft robotics. Sens. Actuators B Chem. 2016, 228, 758–766. [Google Scholar] [CrossRef]
- Yang, C.; Suo, Z. Hydrogel ionotronics. Nat. Rev. Mater. 2018, 6, 125–142. [Google Scholar] [CrossRef]
- Polygerinos, P.; Correll, N.; Morin, S.A.; Mosadegh, B.; Onal, C.D.; Petersen, K.; Cianchetti, M.; Tolley, M.T.; Shepherd, R.F. Soft Robotics: Review of Fluid-Driven Intrinsically Soft Devices; Manufacturing, Sensing, Control, and Applications in Human-Robot Interaction. Adv. Eng. Mater. 2017, 19, 1700016. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 15, 2163–2170. [Google Scholar] [CrossRef]
- Lin, Y.-H.; Siddall, R.; Schwab, F.; Fukushima, T.; Banerjee, H.; Baek, Y.; Vogt, D.; Park, Y.-L.; Jusufi, A. Modeling and Control of a Soft Robotic Fish with Integrated Soft Sensing. Adv. Intell. Syst. 2021, 2000244. [Google Scholar] [CrossRef]
- Chen, W.; Xiong, C.; Liu, C.; Li, P.; Chen, Y. Fabrication and Dynamic Modeling of Bidirectional Bending Soft Actuator Integrated with Optical Waveguide Curvature Sensor. Soft Robot. 2019, 6, 495–506. [Google Scholar] [CrossRef] [PubMed]
- Gerboni, G.; Diodato, A.; Ciuti, G.; Cianchetti, M.; Menciassi, A. Feedback Control of Soft Robot Actuators via Commercial Flex Bend Sensors. IEEE/ASME Trans. Mechatron. 2017, 22, 1881–1888. [Google Scholar] [CrossRef]
- Cui, H.; Zhao, Q.; Zhang, L.; Du, X. Intelligent Polymer-Based Bioinspired Actuators: From Monofunction to Multifunction. Adv. Intell. Syst. 2020, 2, 2000138. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Shih, B.; Laschi, C.; Tolley, M.T. Soft robot perception using embedded soft sensors and recurrent neural networks. Sci. Robot. 2019, 4, eaav1488. [Google Scholar] [CrossRef] [PubMed]
- Tabassian, R.; Nguyen, V.H.; Umrao, S.; Mahato, M.; Kim, J.; Porfiri, M.; Oh, I. Graphene Mesh for Self-Sensing Ionic Soft Actuator Inspired from Mechanoreceptors in Human Body. Adv. Sci. 2019, 6, 1901711. [Google Scholar] [CrossRef]
- Wang, S.; Sun, Z.; Zhao, Y.; Zuo, L. A highly stretchable hydrogel sensor for soft robot multi-modal perception. Sens. Actuators A Phys. 2021, 331, 113006. [Google Scholar] [CrossRef]
- Shen, Z.; Zhu, X.; Majidi, C.; Gu, G. Cutaneous Ionogel Mechanoreceptors for Soft Machines, Physiological Sensing, and Amputee Prostheses. Adv. Mater. 2021, 33, 2102069. [Google Scholar] [CrossRef] [PubMed]
- Homberg, B.S.; Katzschmann, R.K.; Dogar, M.R.; Rus, D. Robust proprioceptive grasping with a soft robot hand. Auton. Robot. 2019, 43, 681–696. [Google Scholar] [CrossRef]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M.; Uzel, S.G.M.; Wood, R.J.; Lewis, J.A. Soft Somatosensitive Actuators via Embedded 3D Printing. Adv. Mater. 2018, 15, 1706383. [Google Scholar] [CrossRef] [PubMed]
- Kaasik, F.; Must, I.; Baranova, I.; Põldsalu, I.; Lust, E.; Johanson, U.; Punning, A.; Aabloo, A. Scalable fabrication of ionic and capacitive laminate actuators for soft robotics. Sens. Actuators B Chem. 2017, 246, 154–163. [Google Scholar] [CrossRef]
- Lo, C.-Y.; Zhao, Y.; Kim, C.; Alsaid, Y.; Khodambashi, R.; Peet, M.; Fisher, R.; Marvi, H.; Berman, S.; Aukes, D.; et al. Highly stretchable self-sensing actuator based on conductive photothermally-responsive hydrogel. Mater. Today 2021, 50, 35–43. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, C.; Tan, W.; Yang, J.; Lin, D.; Liu, L. Electroactive Polymer-Based Soft Actuator with Integrated Functions of Multi-Degree-of-Freedom Motion and Perception. Soft Robot. 2022; ahead of print. [Google Scholar] [CrossRef]
- Zhao, Y.; Lo, C.-Y.; Ruan, L.; Pi, C.-H.; Kim, C.; Alsaid, Y.; Frenkel, I.; Rico, R.; Tsao, T.-C.; He, X. Somatosensory actuator based on stretchable conductive photothermally responsive hydrogel. Sci. Robot. 2021, 53, d5483. [Google Scholar] [CrossRef] [PubMed]
- Kruusamäe, K.; Punning, A.; Aabloo, A.; Asaka, K. Self-Sensing Ionic Polymer Actuators: A Review. Actuators 2015, 4, 17–38. [Google Scholar] [CrossRef]
- Punning, A.; Kruusmaa, M.; Aabloo, A. A self-sensing ion conducting polymer metal composite (IPMC) actuator. Sens. Actuators A Phys. 2007, 136, 656–664. [Google Scholar] [CrossRef]
- Preechayasomboon, P.; Rombokas, E. Sensuator: A Hybrid Sensor–Actuator Approach to Soft Robotic Proprioception Using Recurrent Neural Networks. Actuators 2021, 10, 30. [Google Scholar] [CrossRef]
- Webster, R.J., III; Jones, B.A. Design and Kinematic Modeling of Constant Curvature Continuum Robots: A Review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar] [CrossRef]
- Renda, F.; Giorelli, M.; Calisti, M.; Cianchetti, M.; Laschi, C. Dynamic Model of a Multibending Soft Robot Arm Driven by Cables. IEEE Trans. Robot. 2014, 30, 1109–1122. [Google Scholar] [CrossRef]
- George Thuruthel, T.; Falotico, E.; Manti, M.; Pratesi, A.; Cianchetti, M.; Laschi, C. Learning Closed Loop Kinematic Controllers for Continuum Manipulators in Unstructured Environments. Soft Robot. 2017, 3, 285–296. [Google Scholar] [CrossRef]
- Chi, Y.; Tang, Y.; Liu, H.; Yin, J. Leveraging Monostable and Bistable Pre-Curved Bilayer Actuators for High-Performance Multitask Soft Robots. Adv. Mater. Technol. 2020, 5, 2000370. [Google Scholar] [CrossRef]
- Piazzoni, M.; Piccoli, E.; Migliorini, L.; Milana, E.; Iberite, F.; Vannozzi, L.; Ricotti, L.; Gerges, I.; Milani, P.; Marano, C.; et al. Monolithic Three-Dimensional Functionally Graded Hydrogels for Bioinspired Soft Robots Fabrication. Soft Robot. 2021, 9, 224–232. [Google Scholar] [CrossRef]
- Ye, J.; Yao, Y.-C.; Gao, J.-Y.; Chen, S.; Zhang, P.; Sheng, L.; Liu, J. LM-Jelly: Liquid Metal Enabled Biomimetic Robotic Jellyfish. Soft Robot. 2022; ahead of print. [Google Scholar] [CrossRef]
- Christianson, C.; Goldberg, N.N.; Deheyn, D.D.; Cai, S.; Tolley, M.T. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators. Sci. Robot. 2018, 3, eaat1893. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actuator Shape | Materials | Actuation Method | Speed and Frequency | Feedback Sensing | Modeling | Reference |
|---|---|---|---|---|---|---|
| Fish | Hydrogel | Hydraulic | 0.19 BL/s (1 Hz) | No | FEA | [6] |
| Fish | Dielectric elastomer | Voltage induced stress | 0.24 BL/s (1 Hz) | No | FEA | [4] |
| Jelly-fish | Hydrogel | Pneumatic | 0.65 BL/s (0.67 Hz) | No | FEA and linear approximation | [39] |
| Fish | Hydrogel | Electroresponse | 0.006 BL/s (0.3 Hz) | No | NA | [40] |
| Jelly-fish | Liquid metal | Electromagnetic response | 0.2 BL/s (1 Hz) | Yes | NA | [41] |
| Leptocephali | Dielectric elastomer | Voltage induced stress | 0.009 BL/s (0.33–0.5 Hz) | No | Analytical bending model | [42] |
| Octopus | Hydrogel | Photothermal response | 34.6°/s | Yes | NA | [30] |
| Fish | Silicone, eGaIn | Pneumatic | 0.8–1.2 Hz | Yes | data-driven lumped parameter model | [19] |
| Fish | Hydrogel | Hydraulic | 0.18 BL/s (1 Hz) | Yes | Differential equation and FEA | This work |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Sun, Z.; Duan, S.; Zhao, Y.; Sha, X.; Yu, S.; Zuo, L. A Hydrogel-Based Self-Sensing Underwater Actuator. Micromachines 2022, 13, 1779. https://doi.org/10.3390/mi13101779
Wang S, Sun Z, Duan S, Zhao Y, Sha X, Yu S, Zuo L. A Hydrogel-Based Self-Sensing Underwater Actuator. Micromachines. 2022; 13(10):1779. https://doi.org/10.3390/mi13101779
Chicago/Turabian StyleWang, Shuyu, Zhaojia Sun, Shuaiyang Duan, Yuliang Zhao, Xiaopeng Sha, Shifeng Yu, and Lei Zuo. 2022. "A Hydrogel-Based Self-Sensing Underwater Actuator" Micromachines 13, no. 10: 1779. https://doi.org/10.3390/mi13101779
APA StyleWang, S., Sun, Z., Duan, S., Zhao, Y., Sha, X., Yu, S., & Zuo, L. (2022). A Hydrogel-Based Self-Sensing Underwater Actuator. Micromachines, 13(10), 1779. https://doi.org/10.3390/mi13101779