
An Experimental Investigation on Polarization Process of a PZT-52 Tube Actuator with Interdigitated Electrodes

Abstract
1. Introduction
2. Sample Preparation and Polarization Experiment
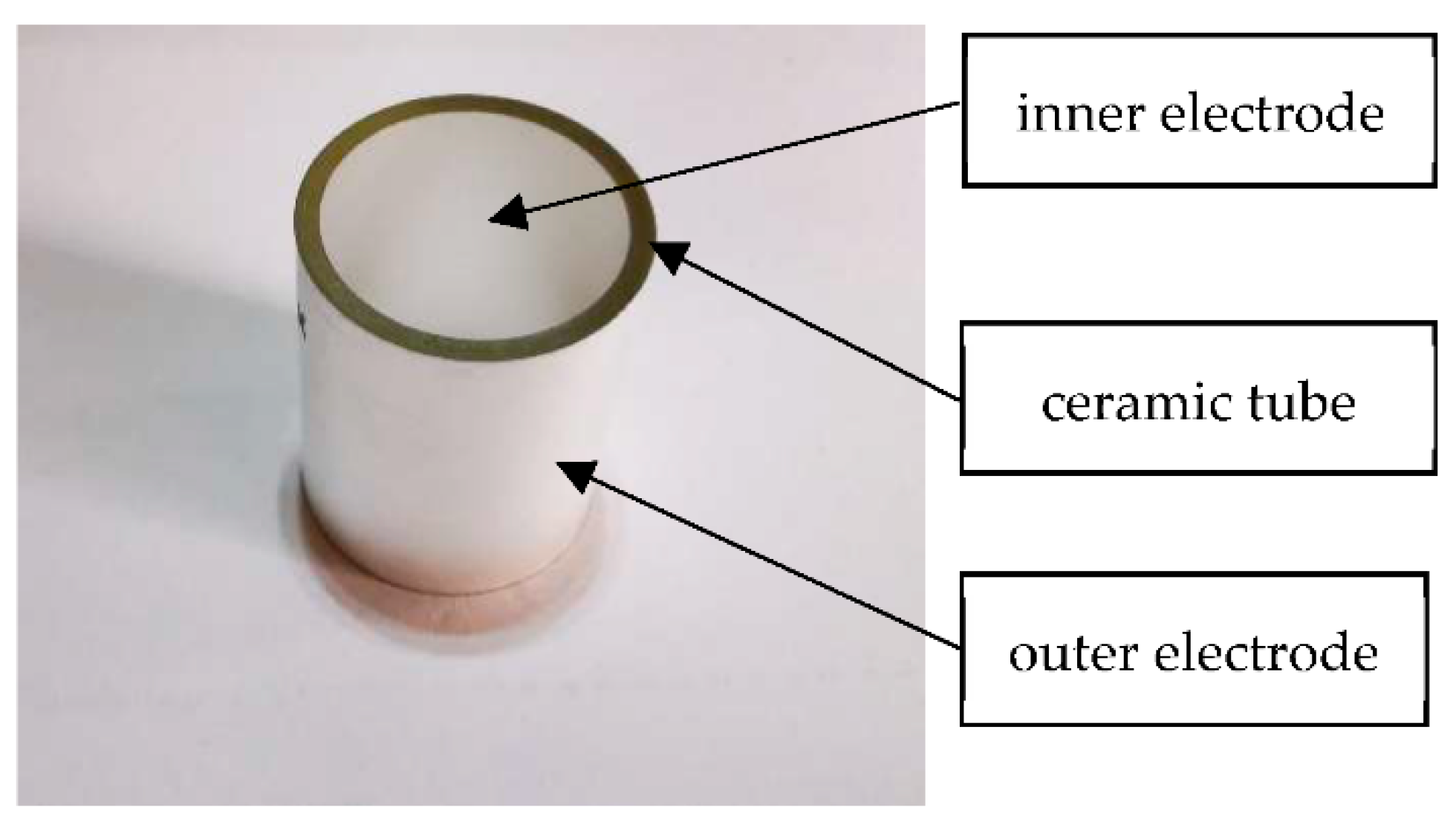
2.1. Structure and Preparation of Tube Actuator with PZT-52
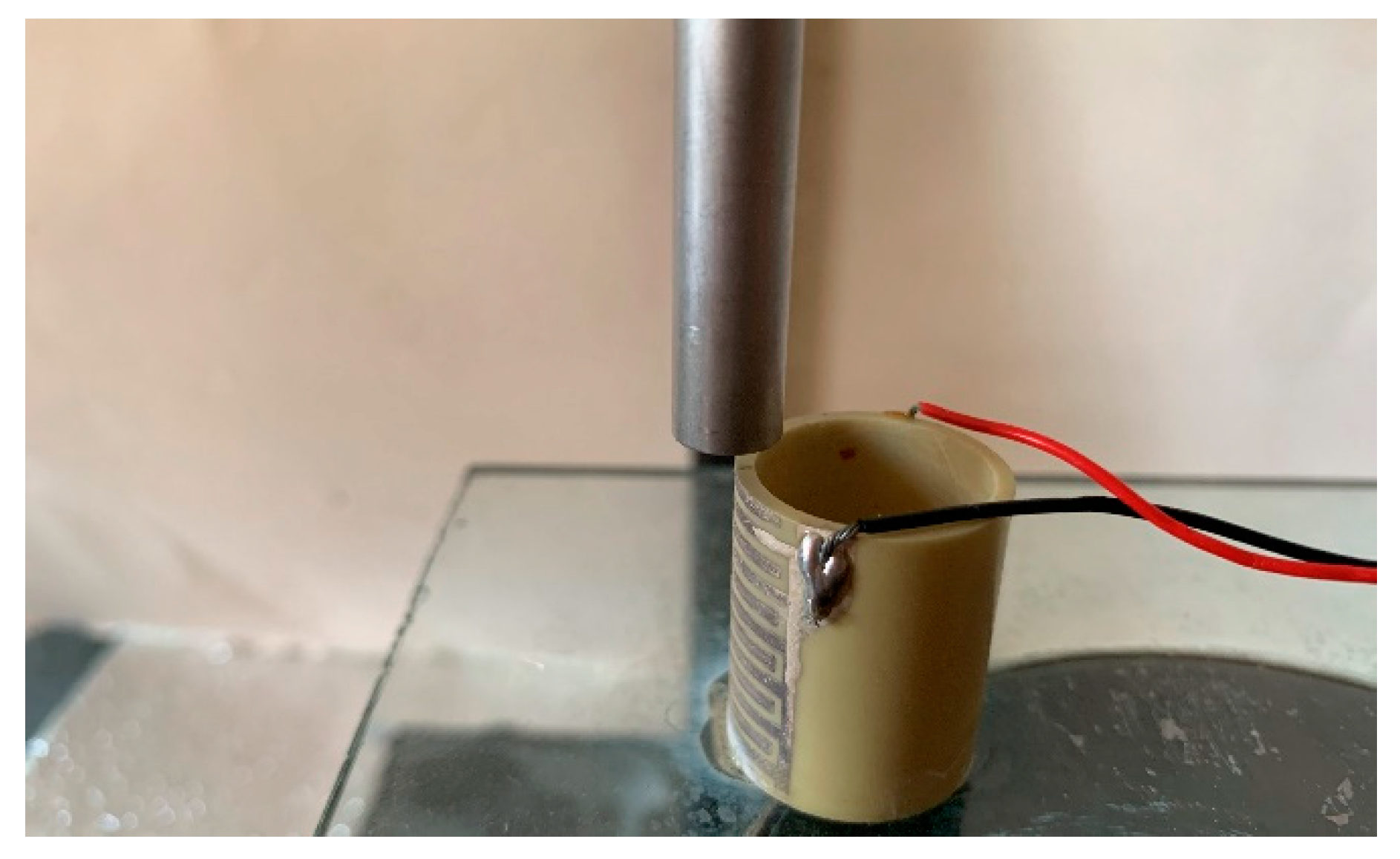
2.2. Electrode Printing with Silver
2.3. Thermal Polarization Experiment
2.3.1. Electric Field Analysis
2.3.2. Polarization Experiment
3. Displacement Test and Analysis
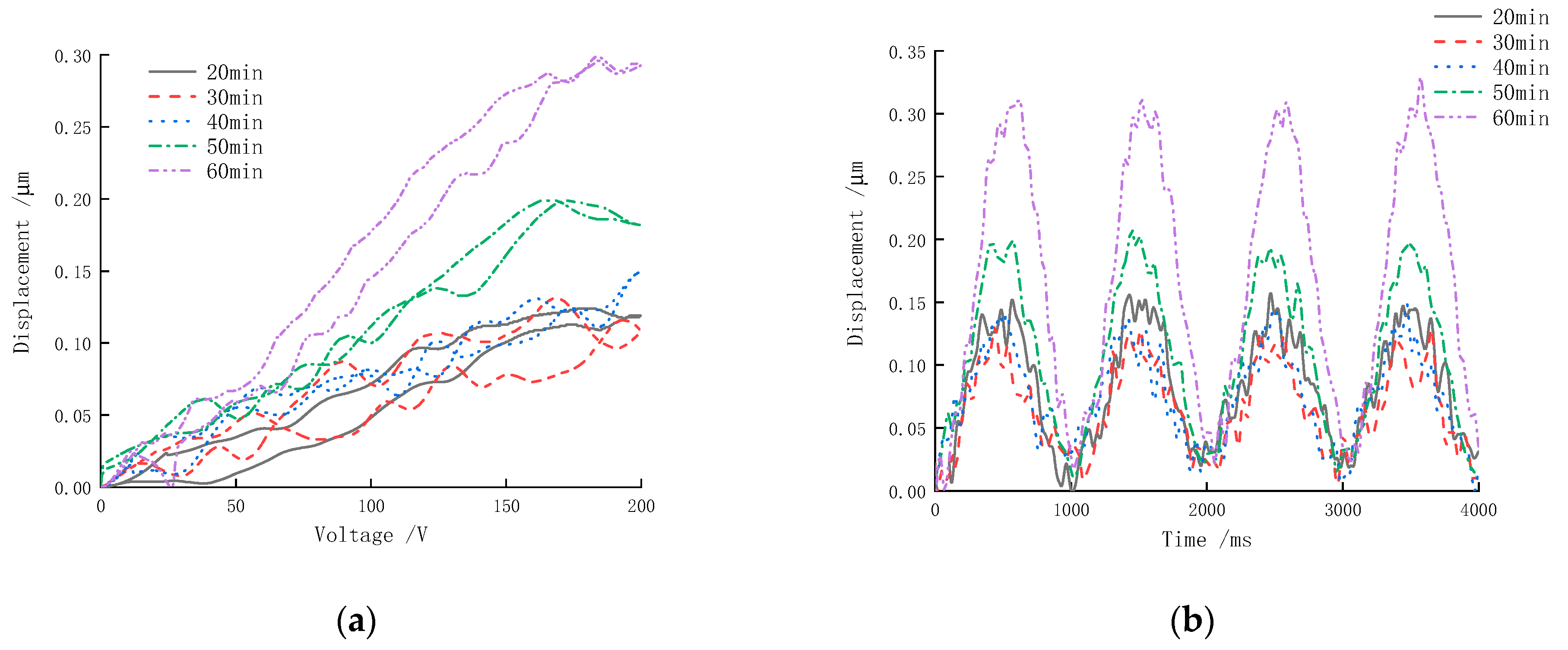
3.1. The Influence of Polarization Voltage on Axial Displacement
3.2. The Influence of Polarization Time on Axial Displacement
3.3. The Influence of Polarization Temperature on Axial Displacement
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, C. Ultrasonic Motors Technologies and Applications; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Kathavate, V.S.; Eswar Prasad, K.; Kiran, M.S.; Zhu, Y. Mechanical characterization of piezoelectric materials: A perspective on deformation behavior across different microstructural length scales. J. Appl. Phys. 2022, 132, 121103. [Google Scholar] [CrossRef]
- Gudarzi, M.; Oveisi, A. Noise reduction in a medical imaging instrument using distributed piezoelectric actuator/sensor based on the FEM modeling. J. Sci. Eng. 2013, 2, 13–22. [Google Scholar]
- Quaegebeur, N.; Masson, P.; Brault, L.; Beaudet, N.; Sarret, P. Pressure mapping system based on guided waves reflection. In Proceedings of the Health Monitoring of Structural and Biological Systems, San Diego, CA, USA, 11–14 March 2013. [Google Scholar]
- Mamishev, A.; Sundara-Rajan, K.; Yang, F.; Du, Y.; Zahn, M. Interdigital sensors and transducers. Proc. IEEE 2004, 92, 808–845. [Google Scholar] [CrossRef]
- Deng, J.; Liu, Y.; Chen, W.; Liu, J. Development and experiment evaluation of an inertial piezoelectric actuator using bending-bending hybrid modes. Sens. Actuators A Phys. 2018, 275, 11–18. [Google Scholar] [CrossRef]
- Shi, S.; Liu, J.; Chen, W.; Liu, Y. A novel l-b hybrid langev in transducer type linear ultrasonic motor with modal coupling reducing configuration. In Proceedings of the Joint Meeting of 12th International Meeting on Ferroelectricity/18th IEEE International Symposium on Applications of Ferroelectrics (IMF-ISAF-2009), Xi’an, China, 23–27 August 2009; Energetic Materials Research Laboratory (EMRL): Xi’an, China, 2009. [Google Scholar]
- Yang, C.; Xie, K.; Chang, J. Design and simulation of an ultrasonic linear motor with dual piezoelectric actuators. In Proceedings of the ASME/JSME 27th Annual Joint International Conference on Information Storage and Processing Systems and Micromechatronics for Information and Precision Equipment, San Francisco, CA, USA, 29–30 August 2018. [Google Scholar]
- Corman, R.; Nedelcu, O.; Dobrescu, D. Design and simulation of a piezoelectric sensor with applications in image stabilization. In Proceedings of the 39th International Semiconductor Conference (CAS), Sinaia, Romania, 10–12 October 2016. [Google Scholar]
- Deng, J.; Liu, Y.; Zhang, S.; Li, J. Development of a Nano-positioning platform with large travel range based on bionic quadruped piezoelectric actuator. IEEE/ASME Trans. Mechatron. 2020, 26, 2059–2070. [Google Scholar] [CrossRef]
- Afonin, S. Rigidity of a multilayer piezoelectric actuator for the Nano and micro range. Russ. Eng. Res. 2021, 41, 285–288. [Google Scholar] [CrossRef]
- Takata, R.; Ishihara, D.; Ramegowda, P.; Tomoya, N. Solid piezoelectric—Shell inverse piezoelectric partitioned analysis method for thin piezoelectric bimorph with conductor layers. Trans. Jpn. Soc. Comput. Eng. Sci. 2019, 20190011. [Google Scholar]
- Tajdari, F.; Berkhoff, A.; Boer, A. Numerical and experimental studies of a flat acoustic source that is actuated by an integrated flexure-based piezoelectric mechanism. J. Sound Vib. 2020, 482, 115435. [Google Scholar] [CrossRef]
- Janphuang, P.; Lockhart, R.; Uffer, N.; Briand, D.; de Rooij, N. Vibrational piezoelectric energy harvesters based on thinned bulk PZT sheets fabricated at the wafer level. Sens. Actuators A Phys. 2014, 210, 1–9. [Google Scholar] [CrossRef]
- Brissaud, M. Characterization of rectangular and cylindrical piezoceramics using three dimensional modelling. Ferroelectrics 2016, 500, 259–275. [Google Scholar] [CrossRef]
- Ma, Y.; Zhong, J.; Zhang, L.; Wu, Y. Piezoelectric properties of 1-3 piezoelectric tubular composites. In Proceedings of the 2nd International Conference on Advanced Design and Manufacturing Engineering (ADME 2012), Taiyuan, China, 16–18 August 2012. [Google Scholar]
- Pustka, M.; Nosek, J.; Burianova, L. Coupled extensional vibrations of longitudinally polarized piezoceramic strips. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2011, 58, 2139–2145. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Zhu, Y.; Shi, W.; Zhang, J. Theory and experimental verification on cymbal-shaped slotted valve piezoelectric pump. Chin. J. Mech. Eng. 2018, 131, 212–219. [Google Scholar] [CrossRef]
- Lay, R.; Deijs, G.; Malmstrom, J. The intrinsic piezoelectric properties of materials—A review with a focus on biological materials. RSC Adv. 2021, 11, 30657–30673. [Google Scholar] [CrossRef] [PubMed]
- Xie, X.; Zhou, Z.; Gao, B.; Zhou, Z.; Liang, R.; Dong, X. Ion-Pair engineering-induced high piezoelectricity in Bi4Ti3O12-based high-temperature piezoceramics. ASC Appl. Mater. Interfaces 2022, 14, 14321–14330. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Wang, T.; Li, X.; Das, S.; Liu, X.; Chen, Z. Enhanced piezoelectricity and excellent thermal stability in sm3+-doped BiFeO3-PBTiO3 ceramics. ASC Appl. Mater. 2022, 4, 807–813. [Google Scholar] [CrossRef]
- Kathavate, V.S.; Kumar, B.P.; Singh, I.; Prasad, K.E. Analysis of indentation size effects(ISE) in nanoindentation hardness in polycrystalline PMN-PT piezoceramic with different domain configurations. Ceram. Int. 2021, 47, 11870–11877. [Google Scholar] [CrossRef]
- Kathavate, V.S.; Kumar, B.P.; Singh, I.; Prasad, K.E. Effect of sub and above Curie temperature annealing on the nanomechanical properties of PMN-PT piezoceramics. Ceram. Int. 2020, 46, 12876–12883. [Google Scholar] [CrossRef]
- Kathavate, V.S.; Kumar, B.P.; Singh, I.; Prasad, K.E. Role of domain configurations on the mechanistic modelling of indentation size effects(ISE) in nanohardness of hard and soft PZT piezoceramics. Int. J. Adv. Eng. Sci. Appl. Math. 2021, 13, 63–78. [Google Scholar] [CrossRef]
- Ren, X.B. Large electric-field-induced strain in ferroelectric crystals by point-defect-mediated reversible domain switching. Nat. Mater. 2004, 3, 91–94. [Google Scholar] [CrossRef]
- Höfling, M.; Zhou, X.D.; Riemer, L.M.; Bruder, E.; Liu, B.Z. Control of polarization in bulk ferroelectrics by mechanical dislocation imprint. Science 2021, 372, 961–964. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, H.; Cross, L. Piezoelectric tubes and tubular composites for actuator and sensor applications. J. Mater. Sci. 1993, 28, 3962–3968. [Google Scholar] [CrossRef]
- Fan, Y.; Zhao, P.; Guo, Z.; Yu, B. Dynamic mechanical properties of variable friction damper based on new piezoelectric ceramic tubular actuator. J. Mater. Res. Technol. 2020, 9, 10909–10915. [Google Scholar] [CrossRef]
- Raghuvanshi, D.; Moore, S.; Fleming, A.; Yong, Y. Electrode configurations for piezoelectric tube actuators with improved scan range and reduced cross-coupling. IEEE/ASME Trans. Mechatron. 2020, 25, 1479–1486. [Google Scholar] [CrossRef]
- Wang, X.; Lin, S. Analysis on the radial vibration of longitudinally polarized radial composite tubular transducer. Sensors 2020, 20, 4785. [Google Scholar] [CrossRef]
- Bowen, C.; Nelson, L.; Stevens, R.; Cain, M.; Stewart, M. Optimization of interdigitated electrodes for piezoelectric actuators and active fiber composites. J. Electroceram. 2006, 16, 263–269. [Google Scholar] [CrossRef]
- Lee, M.; Kim, C.; Park, W.; Cho, J.; Palk, J.; Jeong, Y. Energy harvesting performance of unimorph piezoelectric cantilever generator using interdigitated electrode lead zirconate titanate laminate. Energy 2019, 179, 373–382. [Google Scholar] [CrossRef]
- Hong, E.; Krishnaswamy, S.; Freidhoff, C.; Kinstr, T. Micromachined piezoelectric diaphragms actuated by ring shaped interdigitated transducer electrodes. Sens. Actuators A Phys. 2005, 119, 521–527. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, Z.; Wang, H.; Zhang, T. Finite element analysis of the axial mechanical properties of piezoelectric actuator with tubular interdigitated electrodes. J. Korean Phys. Soc. 2020, 77, 861–868. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, S.; Zeng, A.; Yan, P. Finite element analysis and polarization test of IDEs piezoelectric actuator. Micromachines 2022, 13, 154. [Google Scholar] [CrossRef]
- Kathavate, V.S.; Kumar, B.P.; Singh, I.; Chaudhary, P.R.; Prasad, E.K. Nanoindentation response of PZT and NKN-NT piezoceramics. J. Coupled Syst. Multiscale Dyn. 2018, 6, 291–299. [Google Scholar] [CrossRef]
- Webber, K.G.; Aulbach, E.; Key, T.; Marsilius, M.; Granzow, T.; Rödel, J. Temperature-dependent ferroelastic switching of soft lead zirconate titanate. Acta Mater. 2009, 57, 4614–4623. [Google Scholar] [CrossRef]
- Kathavate, V.S.; Sonagara, H.; Praveen Kumar, B.; Singh, I.; Eswar Prasad, K. Tailoring nanomechanical properties of hard and soft PZT piezoceramics via domain engineering by selective annealing. Mater. Today Commun. 2021, 28, 102495. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage/V | Temperature/°C | Time/min |
|---|---|---|
| 500 | 110 | 20 |
| 600 | 120 | 30 |
| 700 | 130 | 40 |
| 750 | 140 | 50 |
| 800 | 150 | 60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zeng, A.; Zhang, S.; Ma, R.; Du, Z. An Experimental Investigation on Polarization Process of a PZT-52 Tube Actuator with Interdigitated Electrodes. Micromachines 2022, 13, 1760. https://doi.org/10.3390/mi13101760
Liu Y, Zeng A, Zhang S, Ma R, Du Z. An Experimental Investigation on Polarization Process of a PZT-52 Tube Actuator with Interdigitated Electrodes. Micromachines. 2022; 13(10):1760. https://doi.org/10.3390/mi13101760
Chicago/Turabian StyleLiu, Yonggang, Aoke Zeng, Shuliang Zhang, Ruixiang Ma, and Zhe Du. 2022. "An Experimental Investigation on Polarization Process of a PZT-52 Tube Actuator with Interdigitated Electrodes" Micromachines 13, no. 10: 1760. https://doi.org/10.3390/mi13101760
APA StyleLiu, Y., Zeng, A., Zhang, S., Ma, R., & Du, Z. (2022). An Experimental Investigation on Polarization Process of a PZT-52 Tube Actuator with Interdigitated Electrodes. Micromachines, 13(10), 1760. https://doi.org/10.3390/mi13101760