
Optimal Controller Design for Ultra-Precision Fast-Actuation Cutting Systems




Abstract
:1. Introduction
2. Materials and Methods
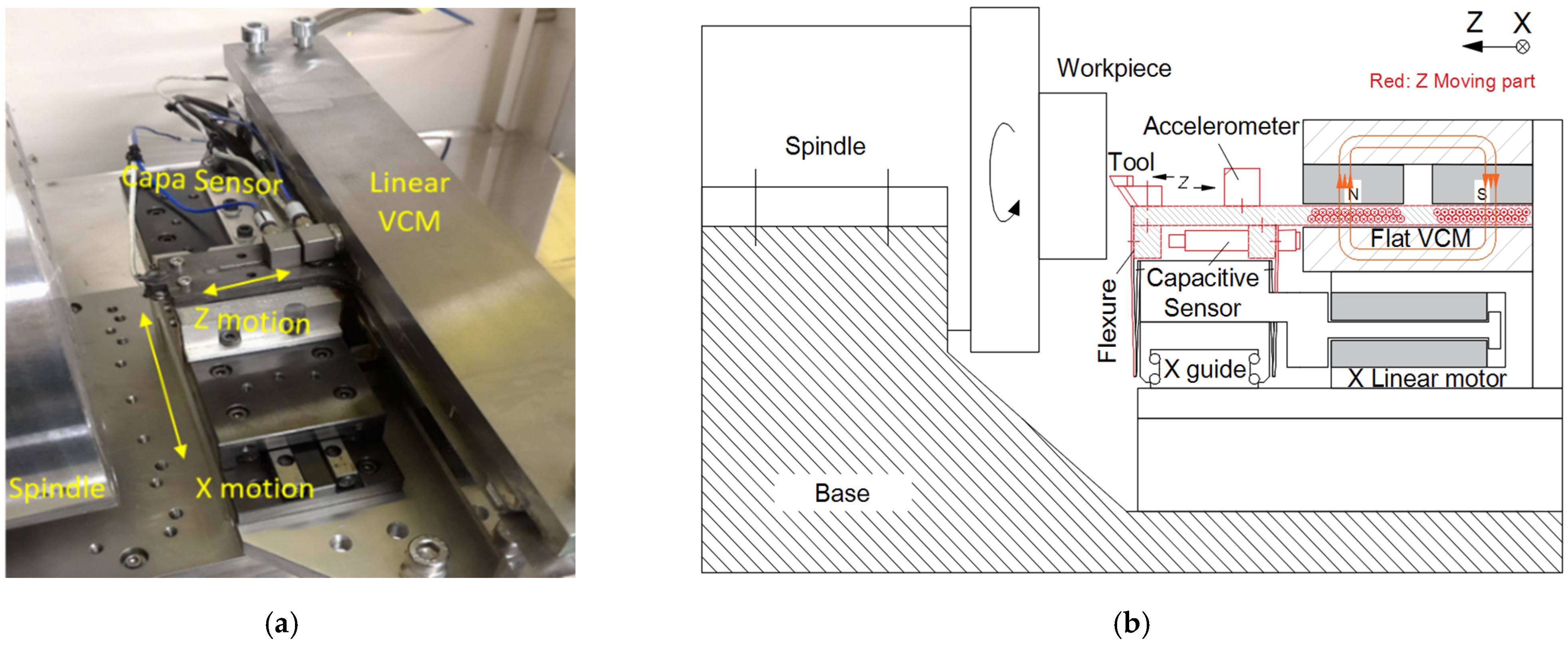
2.1. Experimental Setup
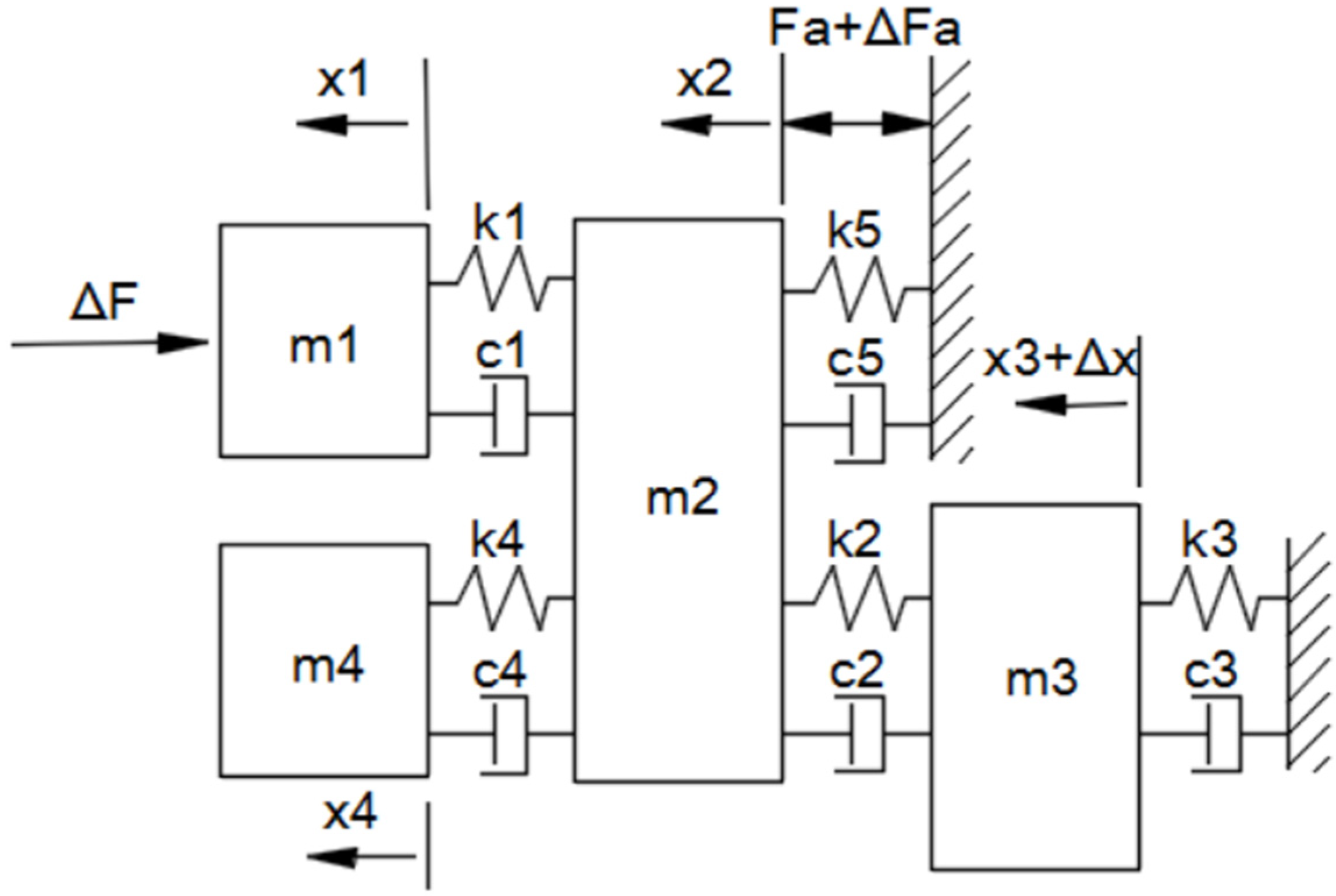
2.2. Experimental Determination of the System Model
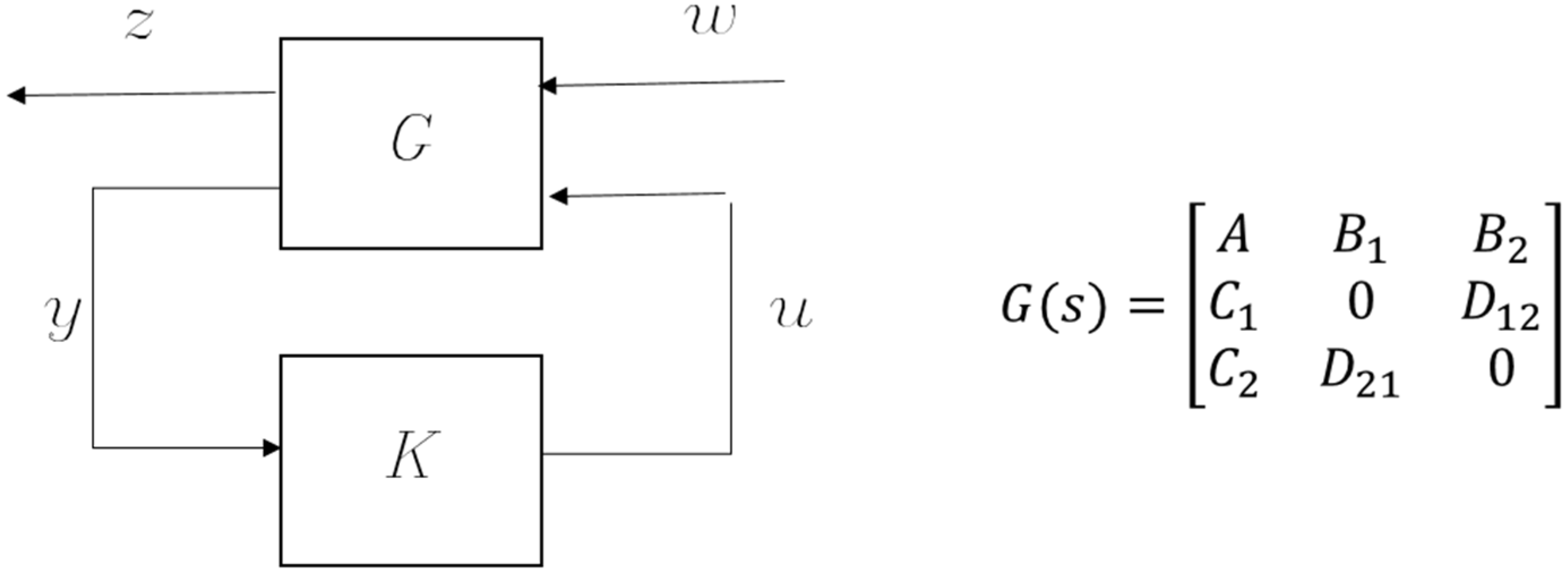
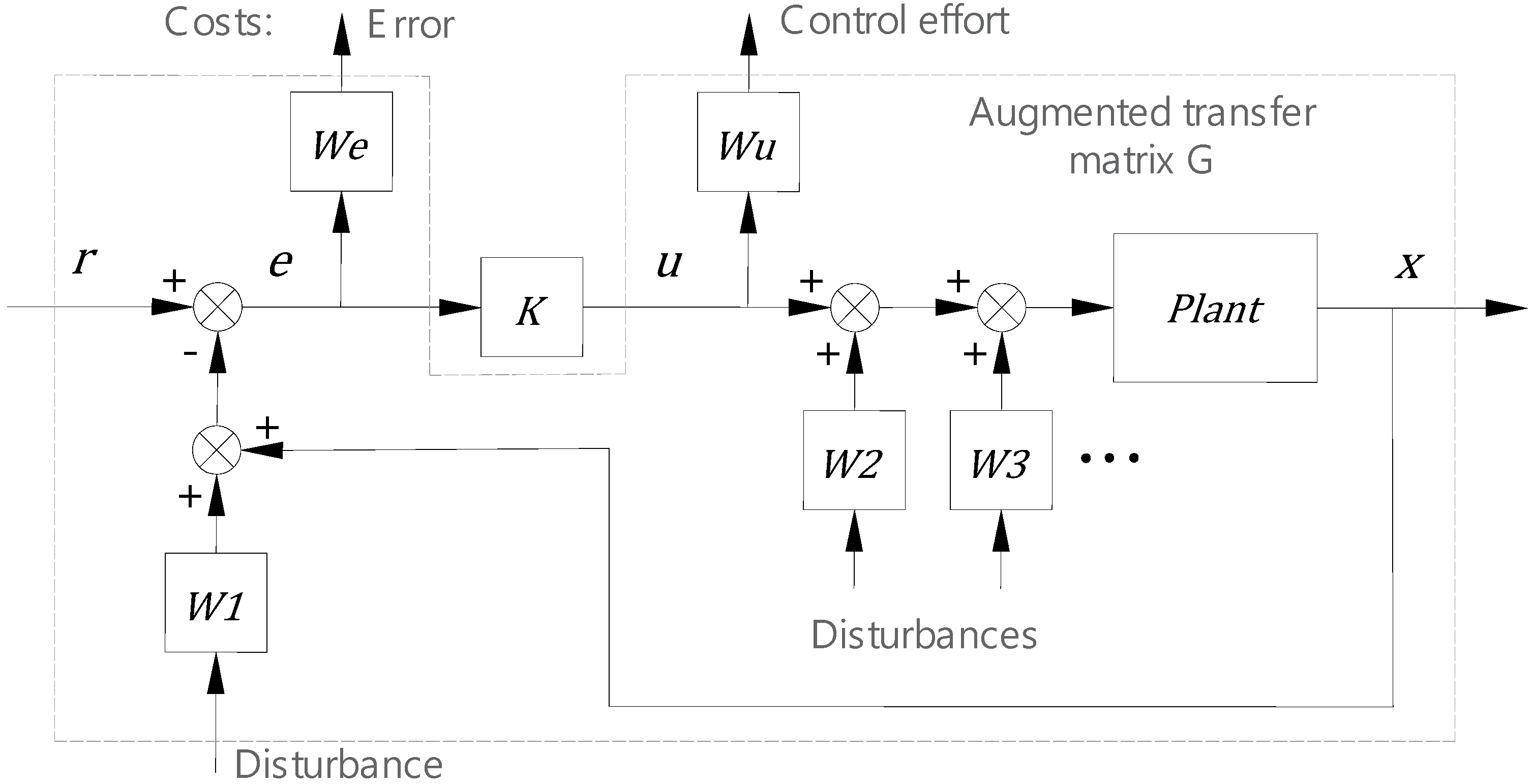
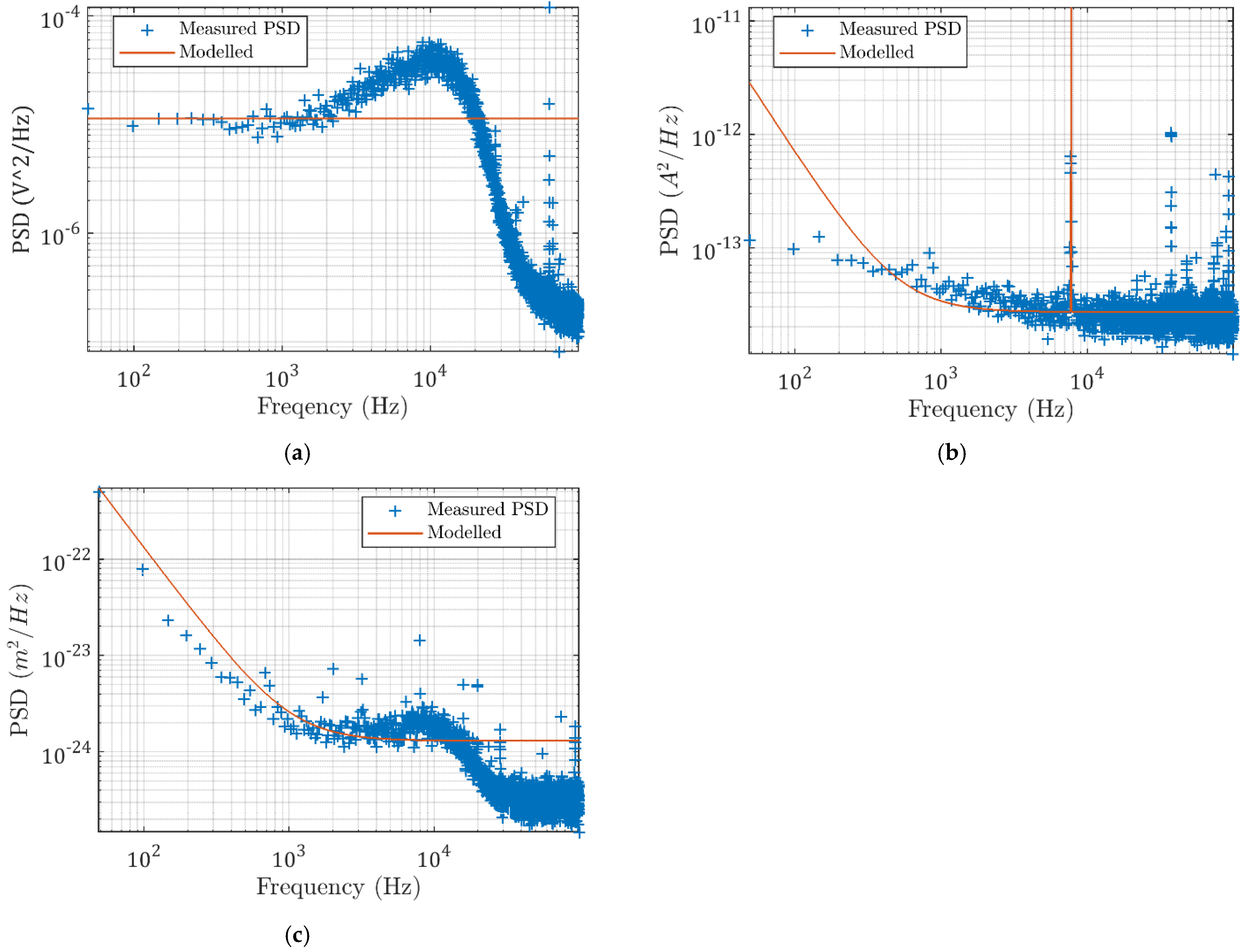
2.3. Modelling of Disturbances and Weighting Functions
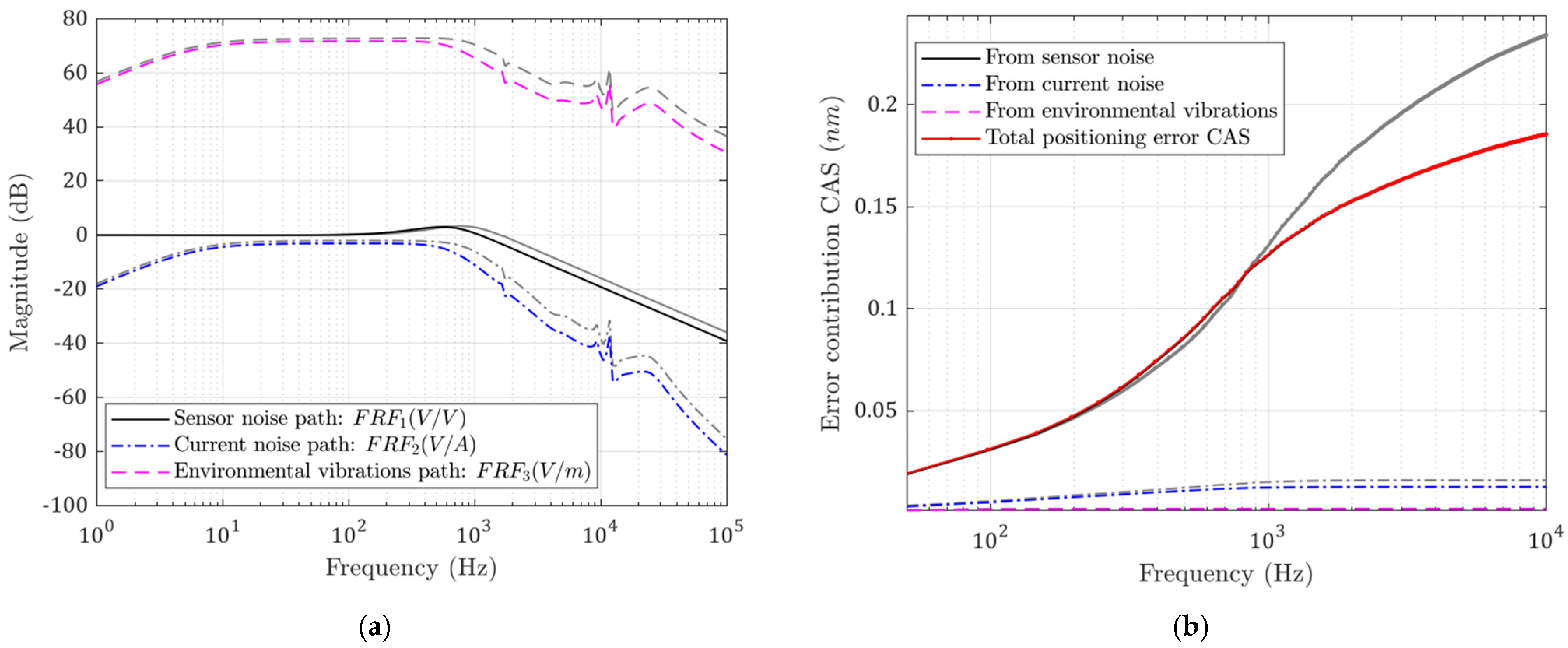
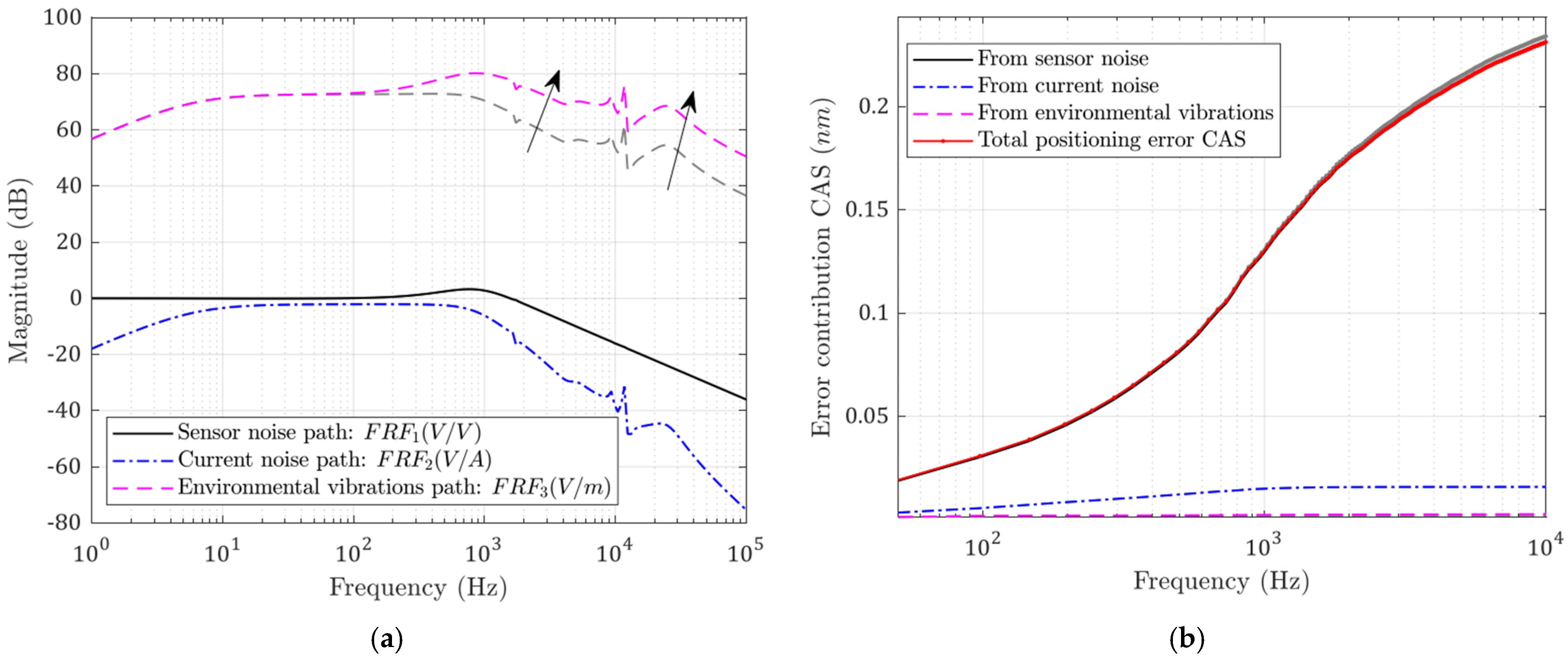
2.4. Modelling of Following Errors
3. Results
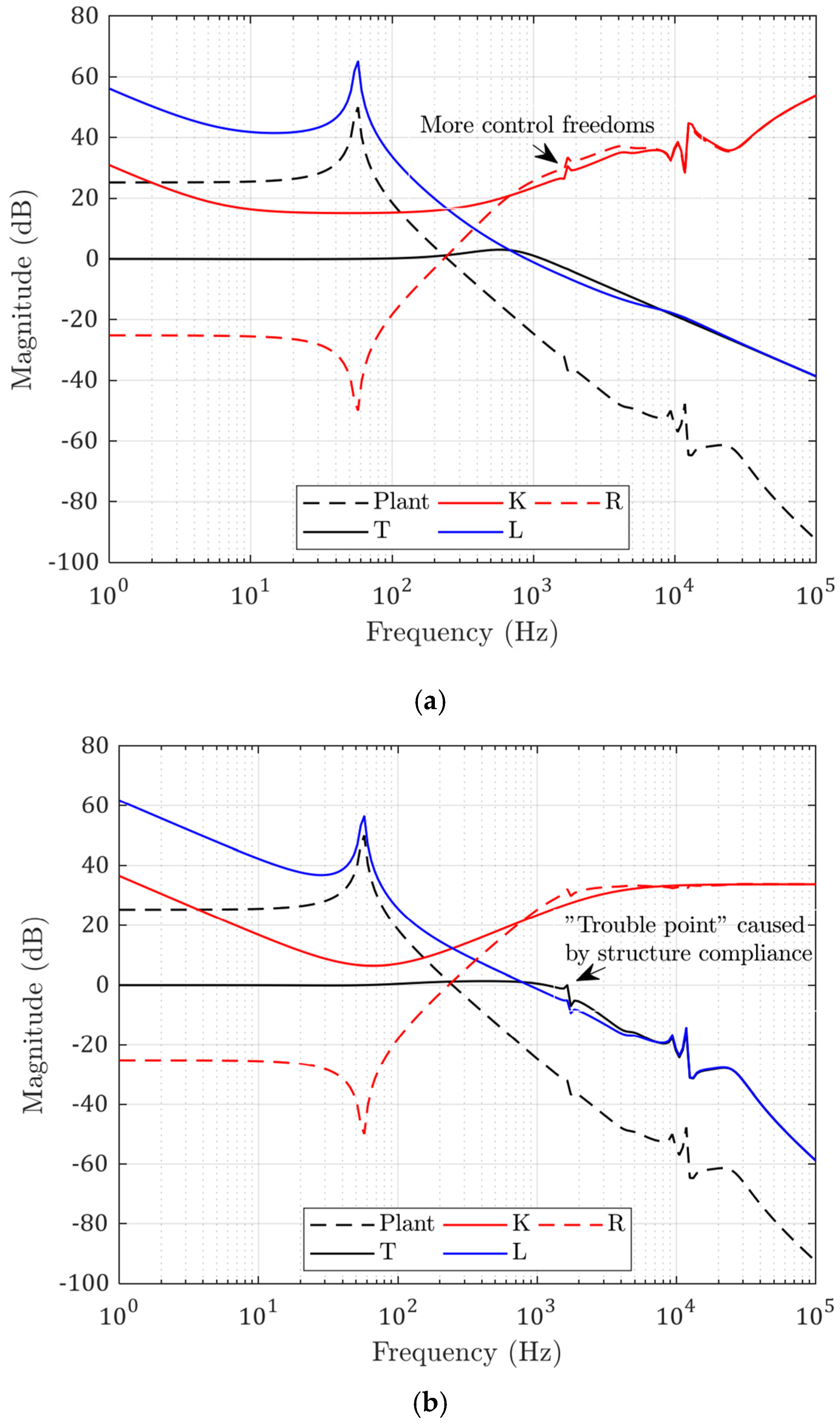
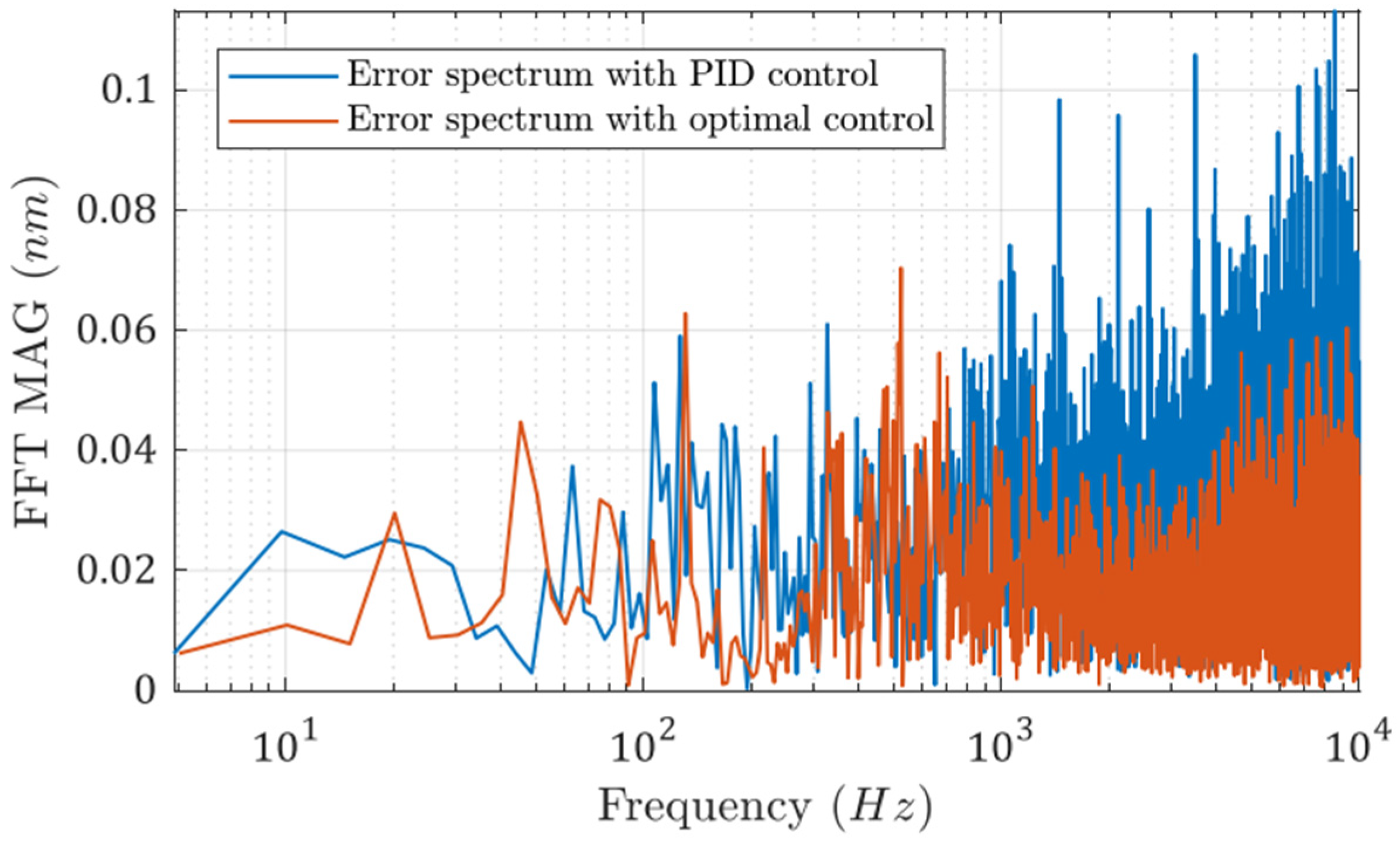
3.1. Closed-Loop Response with Optimal Control
3.2. Study on the Influences of Structural Parameters on Positioning Following Error
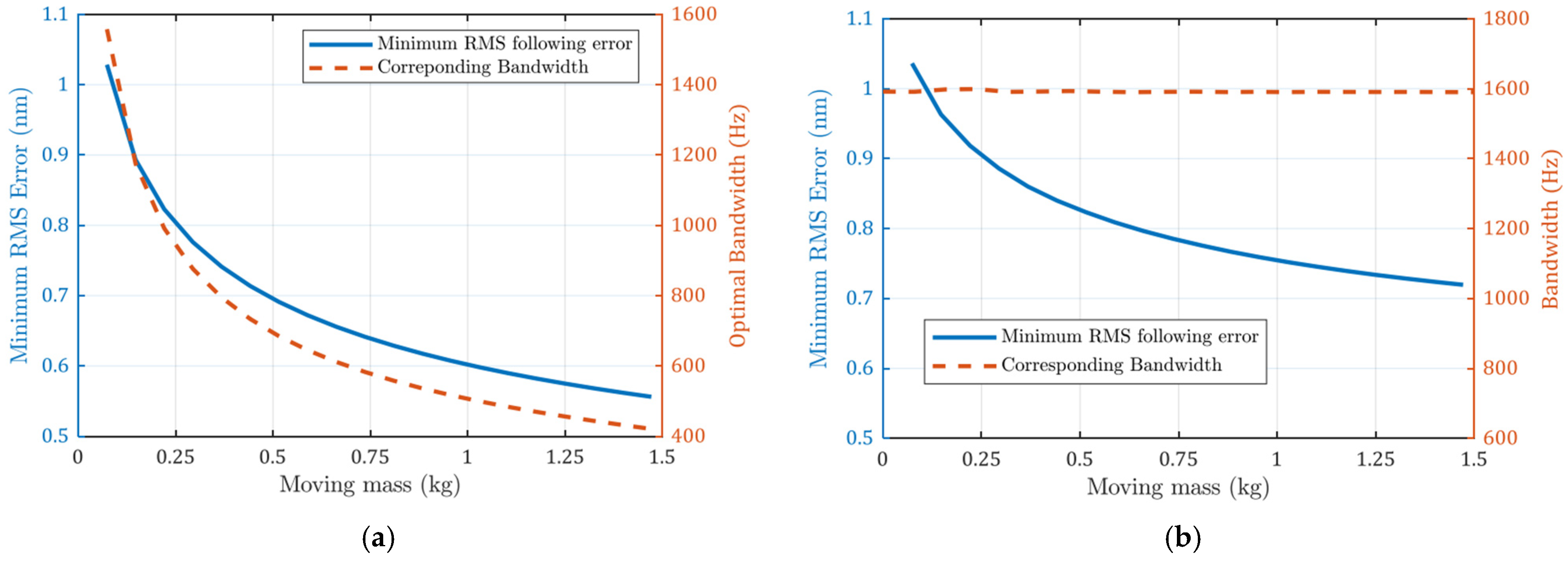
3.2.1. Influence of Moving Mass
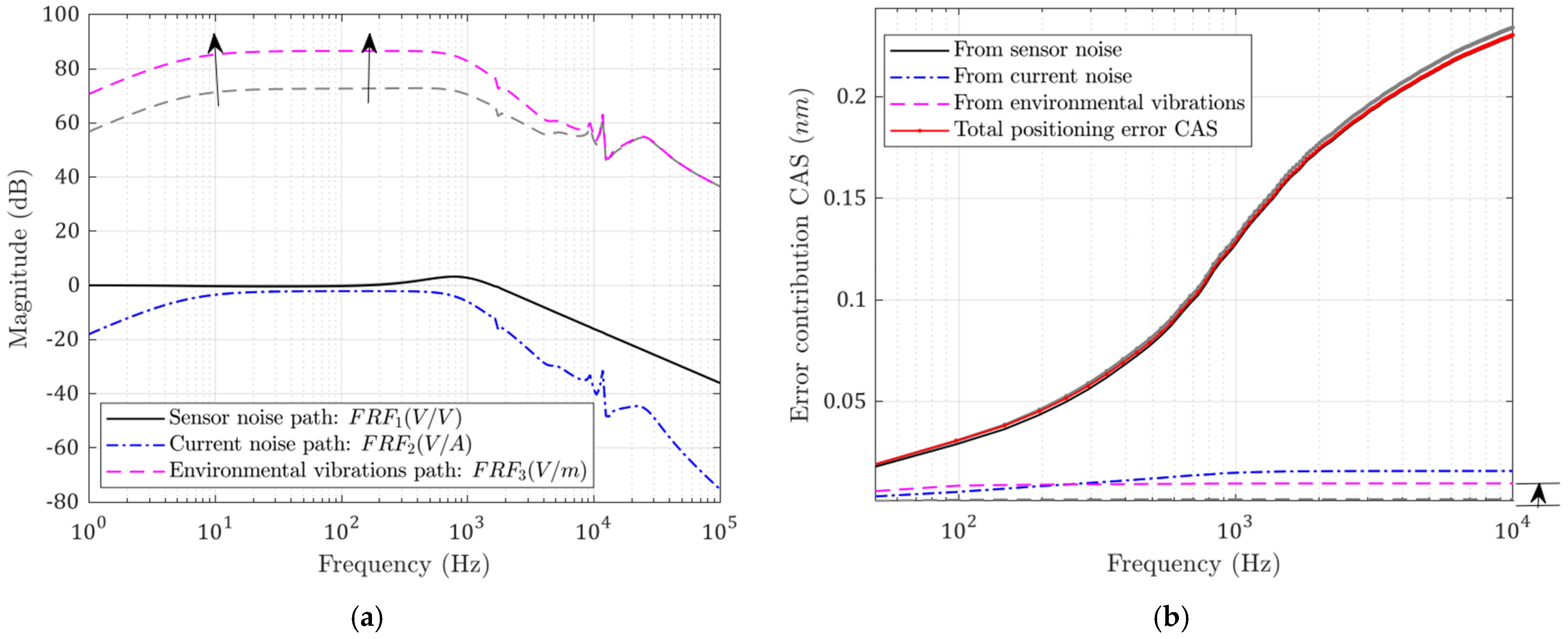
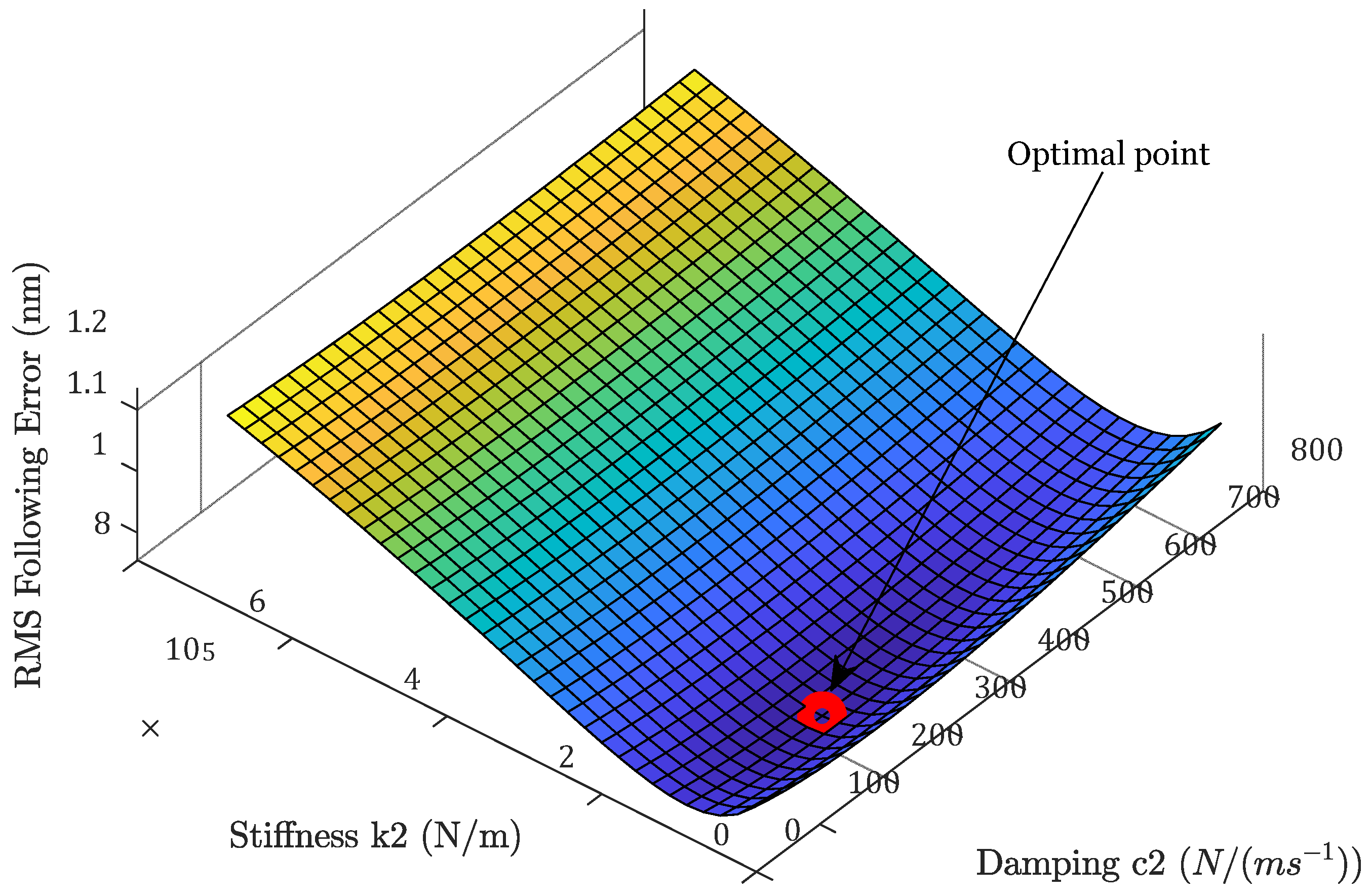
3.2.2. Influence of Flexure Bearing Stiffness and Damping
4. Conclusions
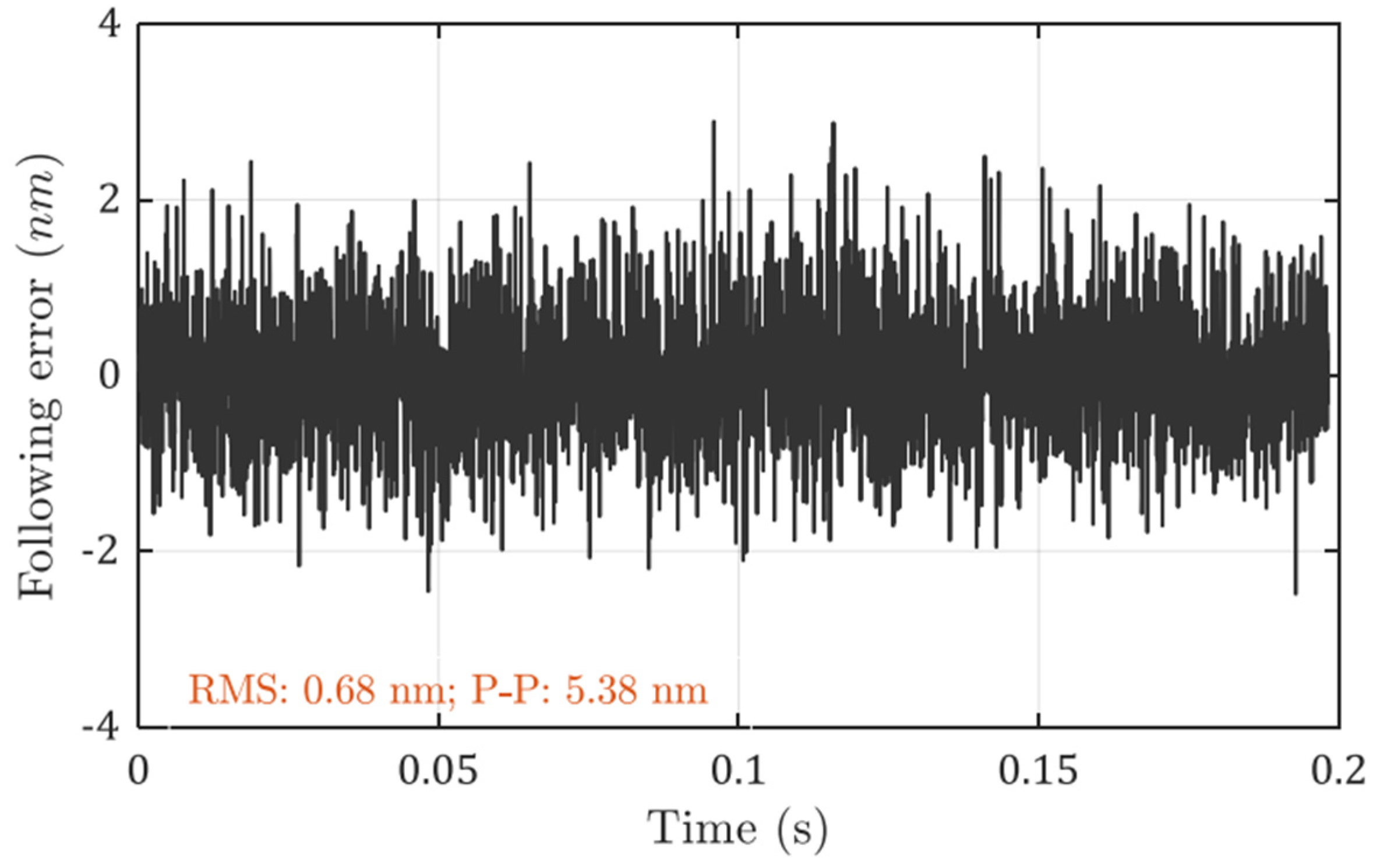
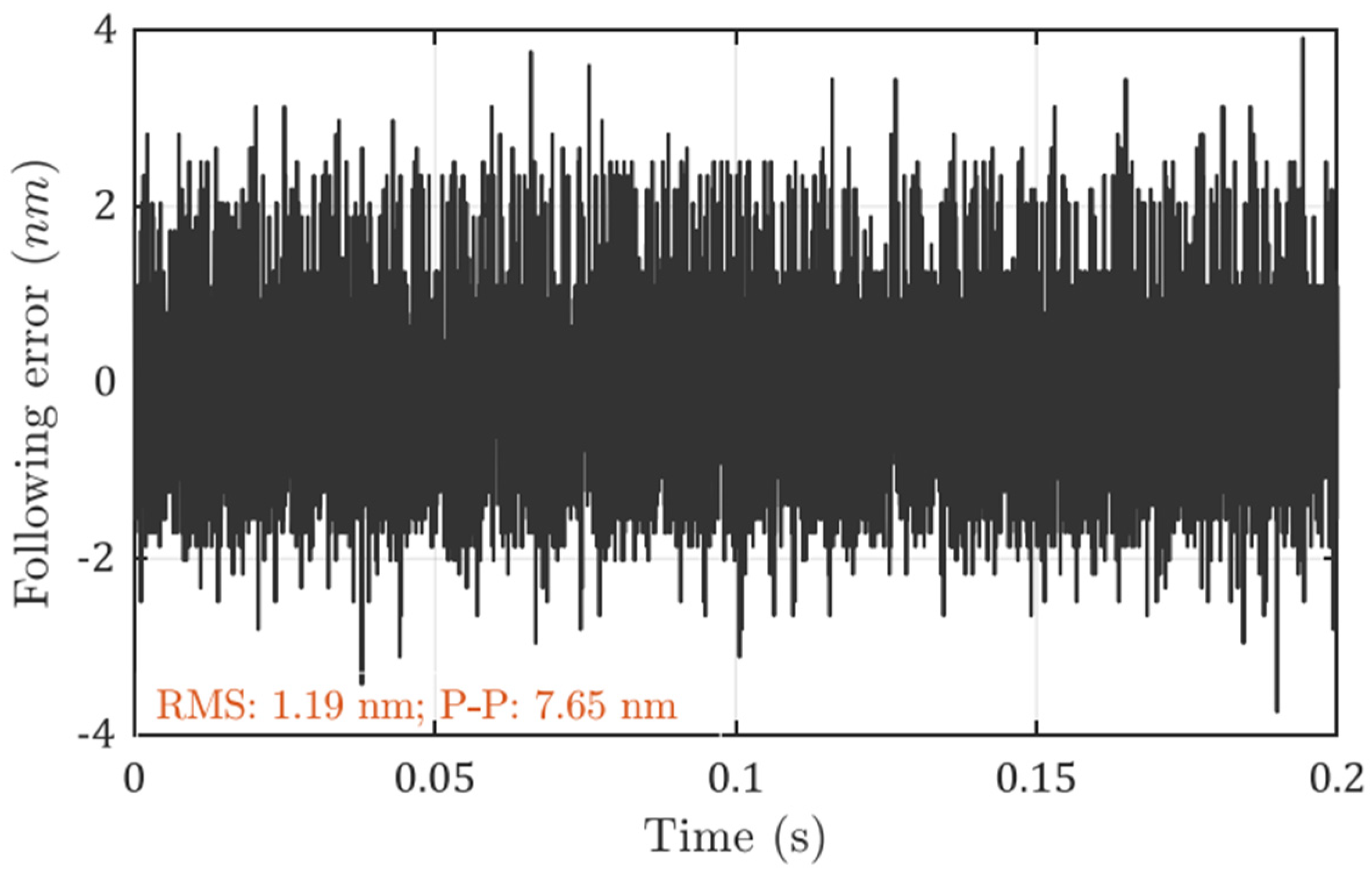
- The positioning error was reduced from 1.19 nm RMS to 0.68 nm RMS with the new controller, showing the benefits of a deterministic controller design approach;
- Under the given disturbances, there exist optimal bearing stiffness and damping coefficients that result in minimal following errors. The optimal bearing stiffness and damping coefficients are and , respectively;
- It was found that increasing moving mass helps to reduce following errors, but the optimal bandwidth will be smaller.
5. Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Fang, F.; Zhang, X.; Weckenmann, A.; Zhang, G.; Evans, C. Manufacturing and measurement of freeform optics. CIRP Ann. Manuf. Technol. 2013, 62, 823–846. [Google Scholar] [CrossRef]
- Qiao, Z.; Wu, Y.; Wang, B.; Liu, Y.; Qu, D.; Zhang, P. The average effect of multi-divisions cutting method on thermal error in cutting horizontal grooves array on roller mold. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2018, 233, 1907–1913. [Google Scholar] [CrossRef]
- Liu, Y.; Li, D.; Ding, F.; Wu, Y.; Xue, J.; Qiao, Z.; Wang, B. Reduction of pitch error of the micro-prism array in brightness enhancement film by compensating z-axis positioning accuracy. Appl. Opt. 2021, 60, 5278–5284. [Google Scholar] [CrossRef] [PubMed]
- Yuan, W.; Cheung, C.-F. Characterization of Surface Topography Variation in the Ultra-Precision Tool Servo-Based Diamond Cutting of 3D Microstructured Surfaces. Micromachines 2021, 12, 1448. [Google Scholar] [CrossRef]
- Padilla-Garcia, E.A.; Rodriguez-Angeles, A.; Resendiz, J.R.; Cruz-Villar, C.A. Concurrent Optimization for Selection and Control of AC Servomotors on the Powertrain of Industrial Robots. IEEE Access 2018, 6, 27923–27938. [Google Scholar] [CrossRef]
- Alter, D.M.; Tsao, T.-C. Control of Linear Motors for Machine Tool Feed Drives: Design and Implementation of H∞ Optimal Feedback Control. J. Dyn. Syst. Meas. Control 1996, 118, 649–656. [Google Scholar] [CrossRef]
- Alter, D.M.; Tsao, T.-C. Control of Linear Motors for Machine Tool Feed Drives: Experimental Investigation of Optimal Feedforward Tracking Control. J. Dyn. Syst. Meas. Control 1998, 120, 137–142. [Google Scholar] [CrossRef]
- Alter, D.; Tsao, T.-C. Optimal feedforward tracking control of linear motors for machine tool drives. In Proceedings of the 1995 American Control Conference-ACC’95, Seattle, WA, USA, 21–23 June 1995; Volume 1, pp. 210–214. [Google Scholar]
- Dumanli, A.; Sencer, B. Optimal high-bandwidth control of ball-screw drives with acceleration and jerk feedback. Precis. Eng. 2018, 54, 254–268. [Google Scholar] [CrossRef]
- Huang, W.-W.; Li, L.; Li, Z.-L.; Zhu, Z.; Zhu, L.-M. Robust high-bandwidth control of nano-positioning stages with Kalman filter based extended state observer and H∞ control. Rev. Sci. Instrum. 2021, 92, 065003. [Google Scholar] [CrossRef] [PubMed]
- Zhu, F.; Wang, H.; Tian, Y. Optimal law based improved reset PID control and application to HDD head-positioning systems. In Proceedings of the 2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Hefei, China, 19–21 May 2017; pp. 258–262. [Google Scholar]
- Mendoza-Mondragon, F.; Hernandez-Guzman, V.M.; Rodriguez-Resendiz, J. Robust Speed Control of Permanent Magnet Synchronous Motors Using Two-Degrees-of-Freedom Control. IEEE Trans. Ind. Electron. 2018, 65, 6099–6108. [Google Scholar] [CrossRef]
- Zheng, C.; Su, Y.; Mercorelli, P. A simple nonlinear PD control for faster and high-precision positioning of servomechanisms with actuator saturation. Mech. Syst. Signal Process. 2019, 121, 215–226. [Google Scholar] [CrossRef]
- Li, Z.; Guan, C.; Dai, Y.; Xue, S.; Yin, L. Comprehensive Design Method of a High-Frequency-Response Fast Tool Servo System Based on a Full-Frequency Error Control Algorithm. Micromachines 2021, 12, 1354. [Google Scholar] [CrossRef] [PubMed]
- Hama, T.; Sato, K. High-speed and high-precision tracking control of ultrahigh-acceleration moving-permanent-magnet linear synchronous motor. Precis. Eng. 2015, 40, 151–159. [Google Scholar] [CrossRef]
- Ramesh, R.; Mannan, M.A.; Poo, A.N. Error compensation in machine tools—A review: Part I: Geometric, cut-ting-force induced and fixture-dependent errors. Int. J. Mach. Tools Manuf. 2000, 40, 1235–1256. [Google Scholar] [CrossRef]
- Ramesh, R.; Mannan, M.; Poo, A. Error compensation in machine tools—A review: Part II: Thermal errors. Int. J. Mach. Tools Manuf. 2000, 40, 1257–1284. [Google Scholar] [CrossRef]
- Zhou, K.; Doyle, J.C. Essentials of Robust Control; Prentice Hall: Upper Saddle River, NJ, USA, 1998; Volume 104. [Google Scholar]
- Sperilă, A.; Ciubotaru, B.D.; Oară, C. The optimal H2 controller for generalized discrete-time sys-tems. Automatica 2021, 133, 109889. [Google Scholar] [CrossRef]
- Ding, F.; Luo, X.; Zhong, W.; Chang, W. Design of a new fast tool positioning system and systematic study on its positioning stability. Int. J. Mach. Tools Manuf. 2019, 142, 54–65. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, F.; Luo, X.; Li, D.; Qiao, Z.; Wang, B. Optimal Controller Design for Ultra-Precision Fast-Actuation Cutting Systems. Micromachines 2022, 13, 33. https://doi.org/10.3390/mi13010033
Ding F, Luo X, Li D, Qiao Z, Wang B. Optimal Controller Design for Ultra-Precision Fast-Actuation Cutting Systems. Micromachines. 2022; 13(1):33. https://doi.org/10.3390/mi13010033
Chicago/Turabian StyleDing, Fei, Xichun Luo, Duo Li, Zheng Qiao, and Bo Wang. 2022. "Optimal Controller Design for Ultra-Precision Fast-Actuation Cutting Systems" Micromachines 13, no. 1: 33. https://doi.org/10.3390/mi13010033
APA StyleDing, F., Luo, X., Li, D., Qiao, Z., & Wang, B. (2022). Optimal Controller Design for Ultra-Precision Fast-Actuation Cutting Systems. Micromachines, 13(1), 33. https://doi.org/10.3390/mi13010033