
Dynamic Modeling and Experimental Validation of a Water Hydraulic Soft Manipulator Based on an Improved Newton—Euler Iterative Method



Abstract
:1. Introduction
2. Dynamic Model
2.1. Kinematics
2.2. Dynamics
2.2.1. Inertial Force and Moment
2.2.2. Elastic Force and Moment
2.2.3. Driving Force and Torque
2.2.4. Interaction between Soft Units
2.2.5. Damping Force and Moment
2.2.6. Gravity
2.3. Dynamics of the Water Hydraulic System
3. Simulation Results
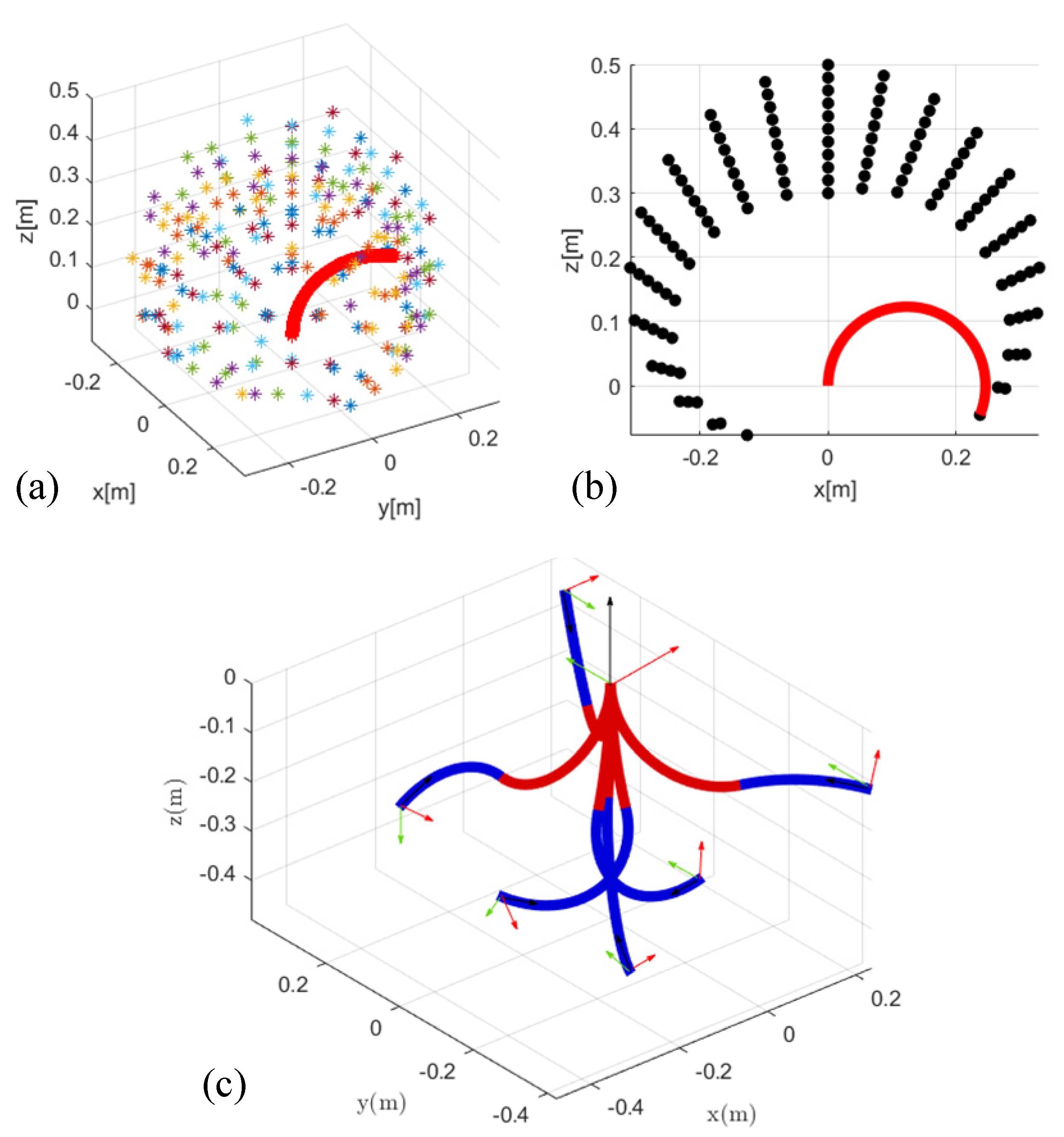
3.1. Workspace
3.2. Results
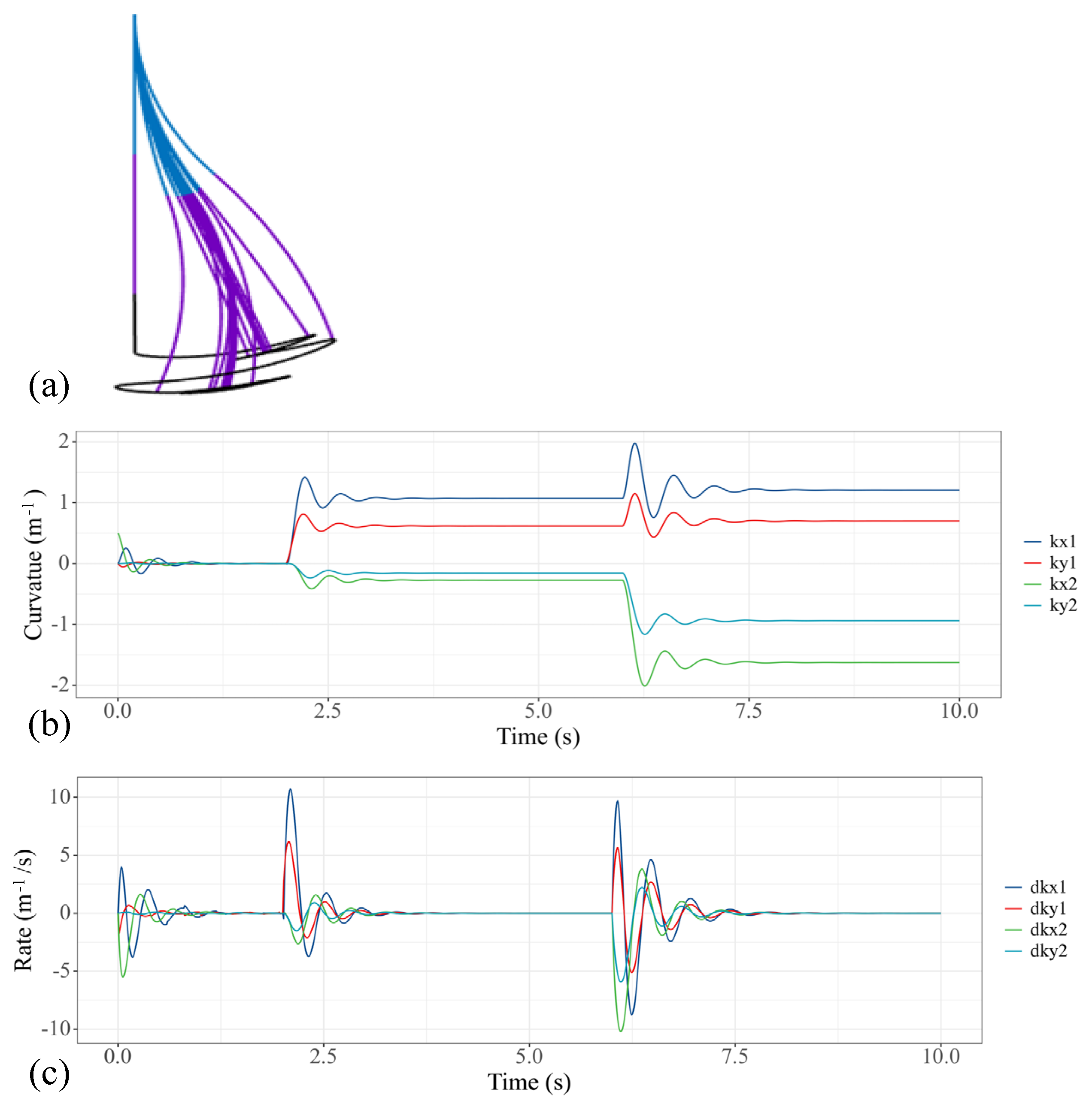
3.2.1. Unidirectional Bending with Step Input Torque
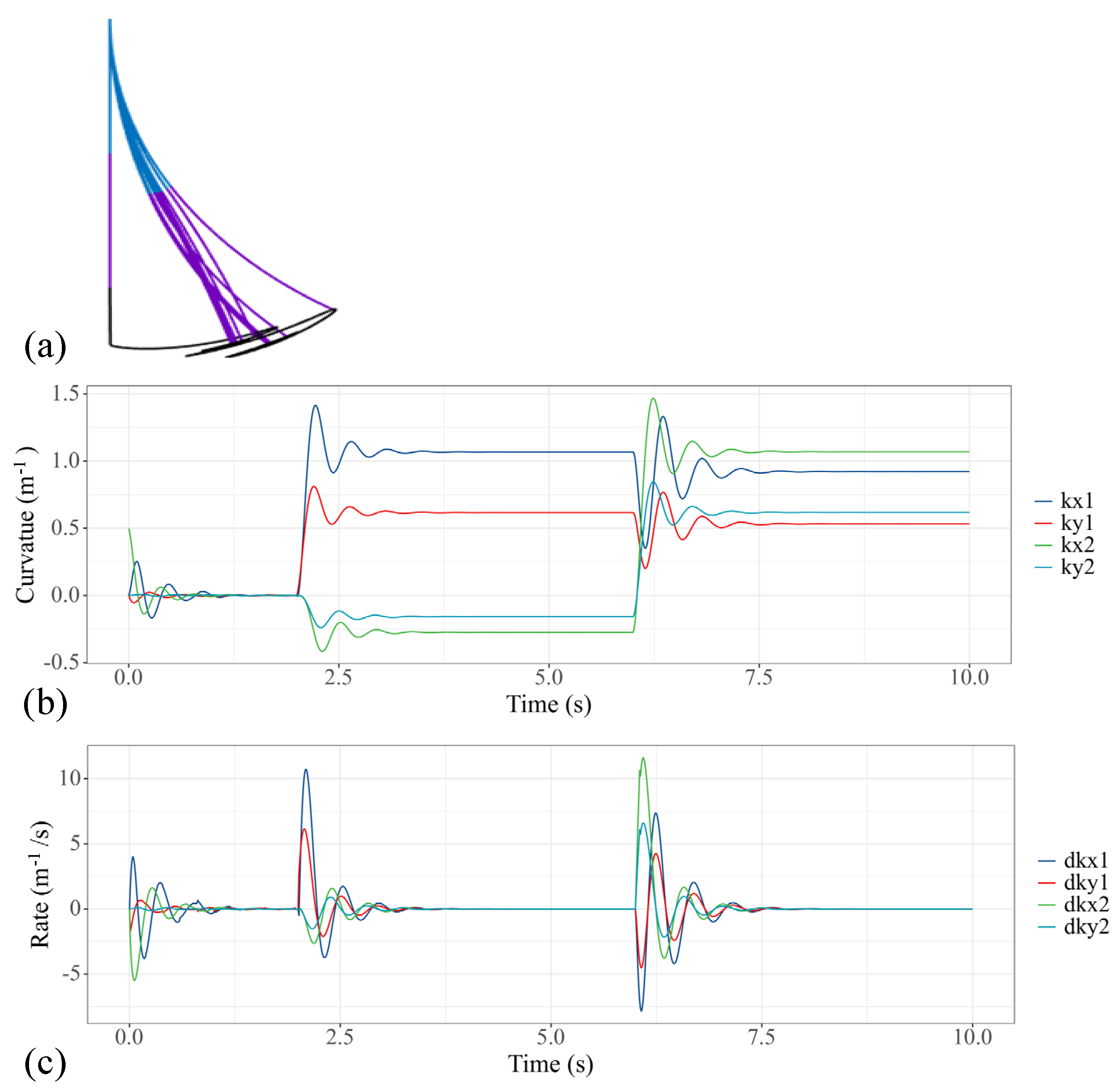
3.2.2. Bi-Directional Bending with Step Input Torque
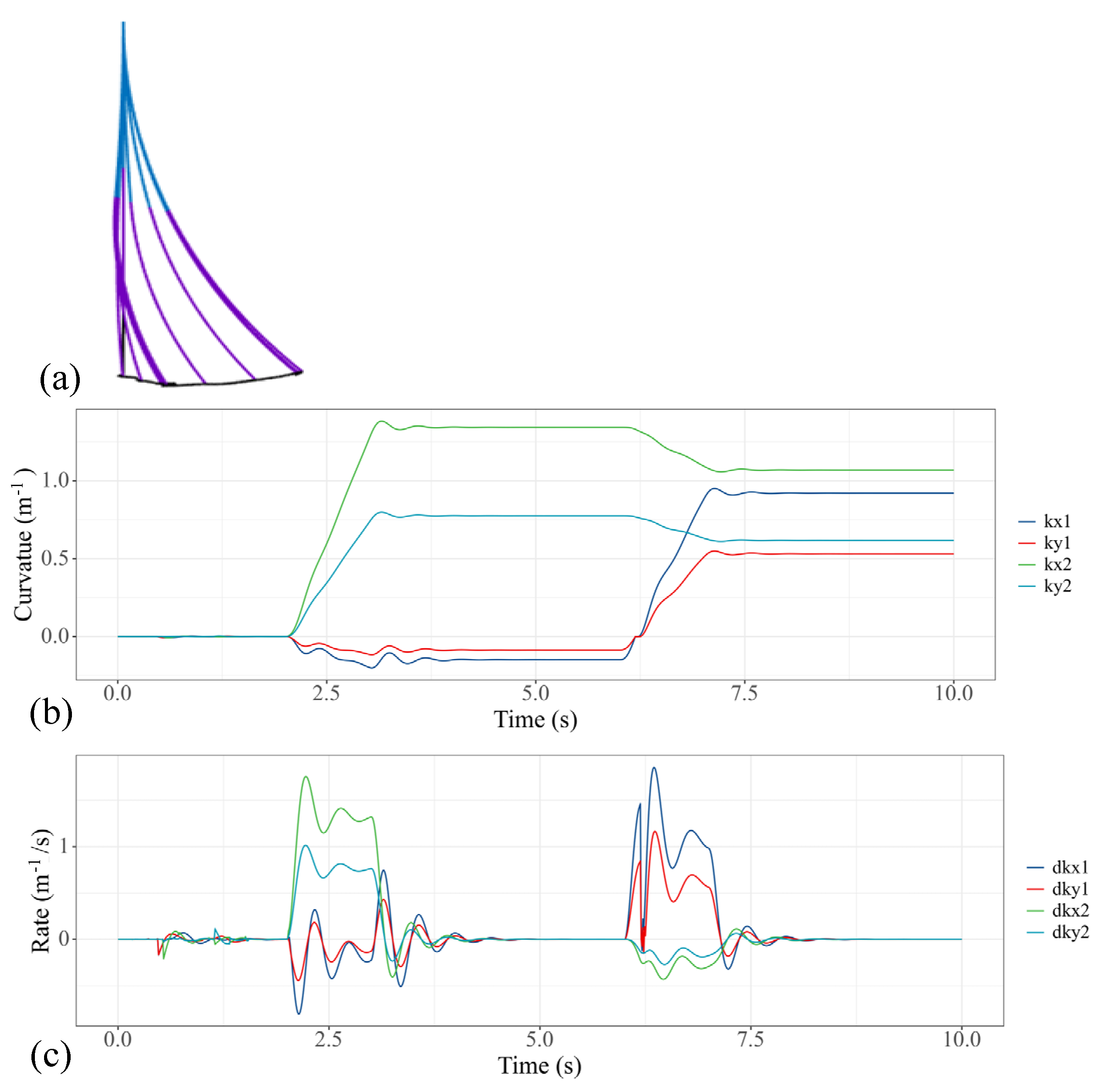
3.2.3. Unidirectional Bending with Ramp Input Torque
4. Experimental Results
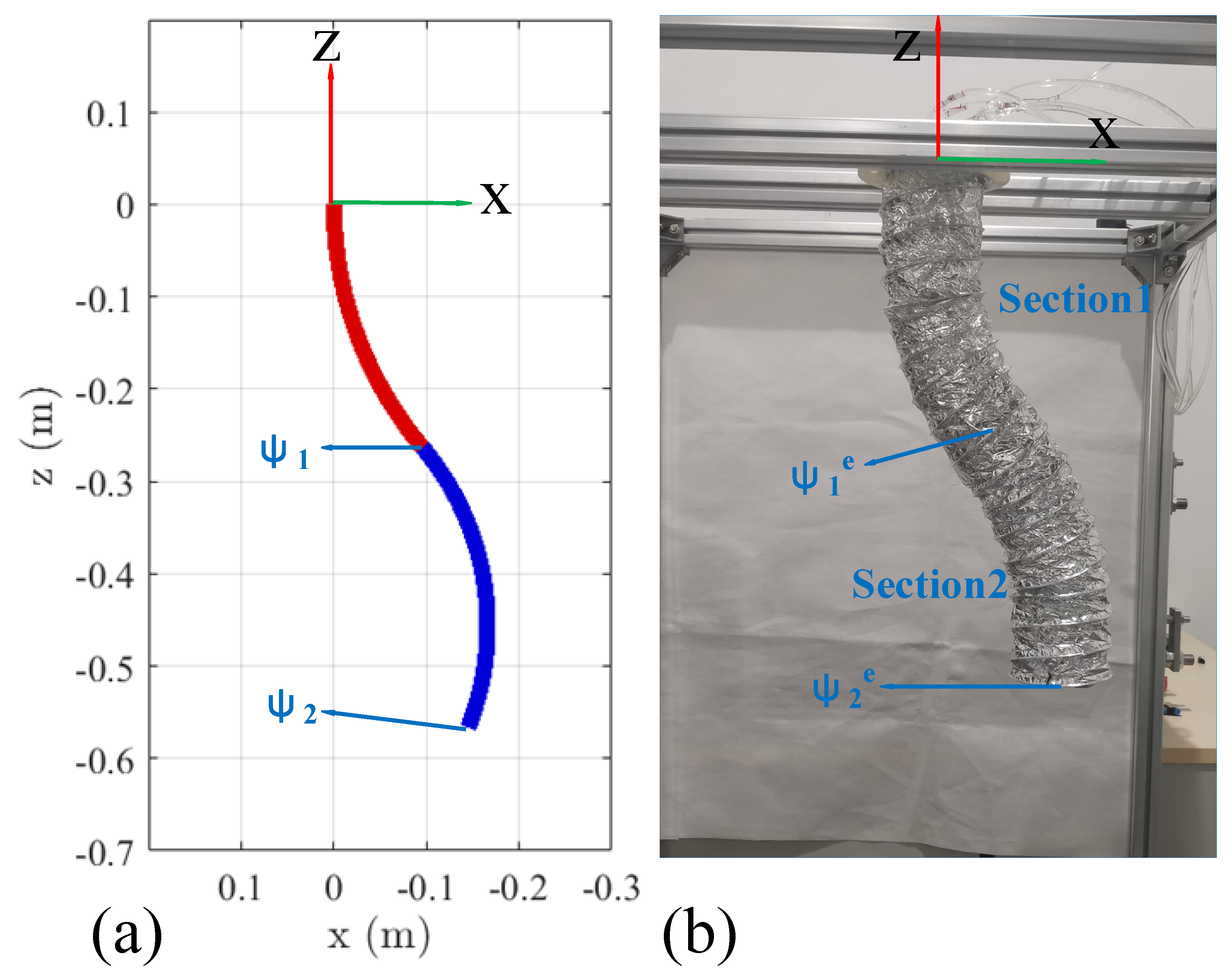
4.1. Test Platform
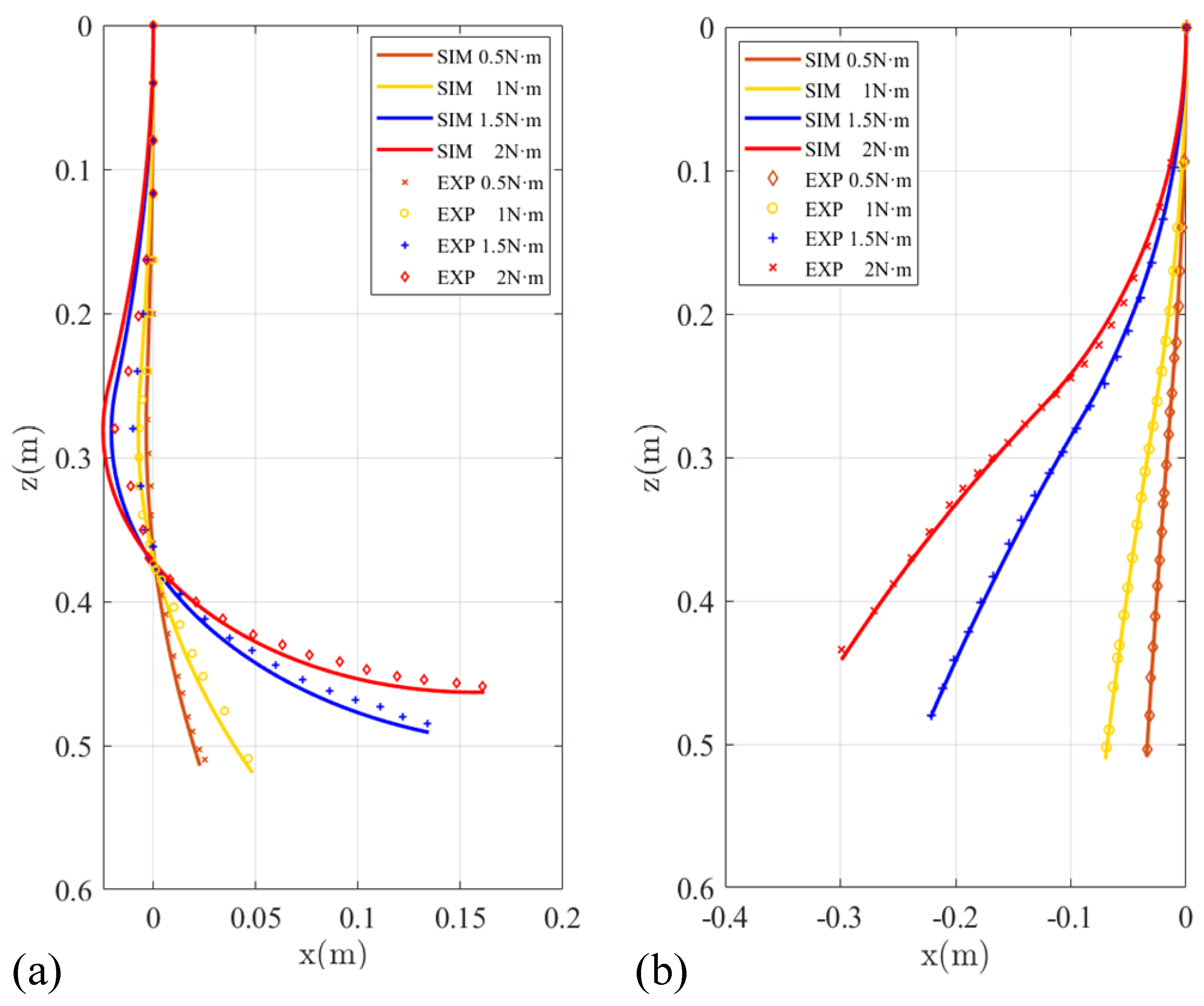
4.2. Steady Performance
4.3. Dynamic Performance
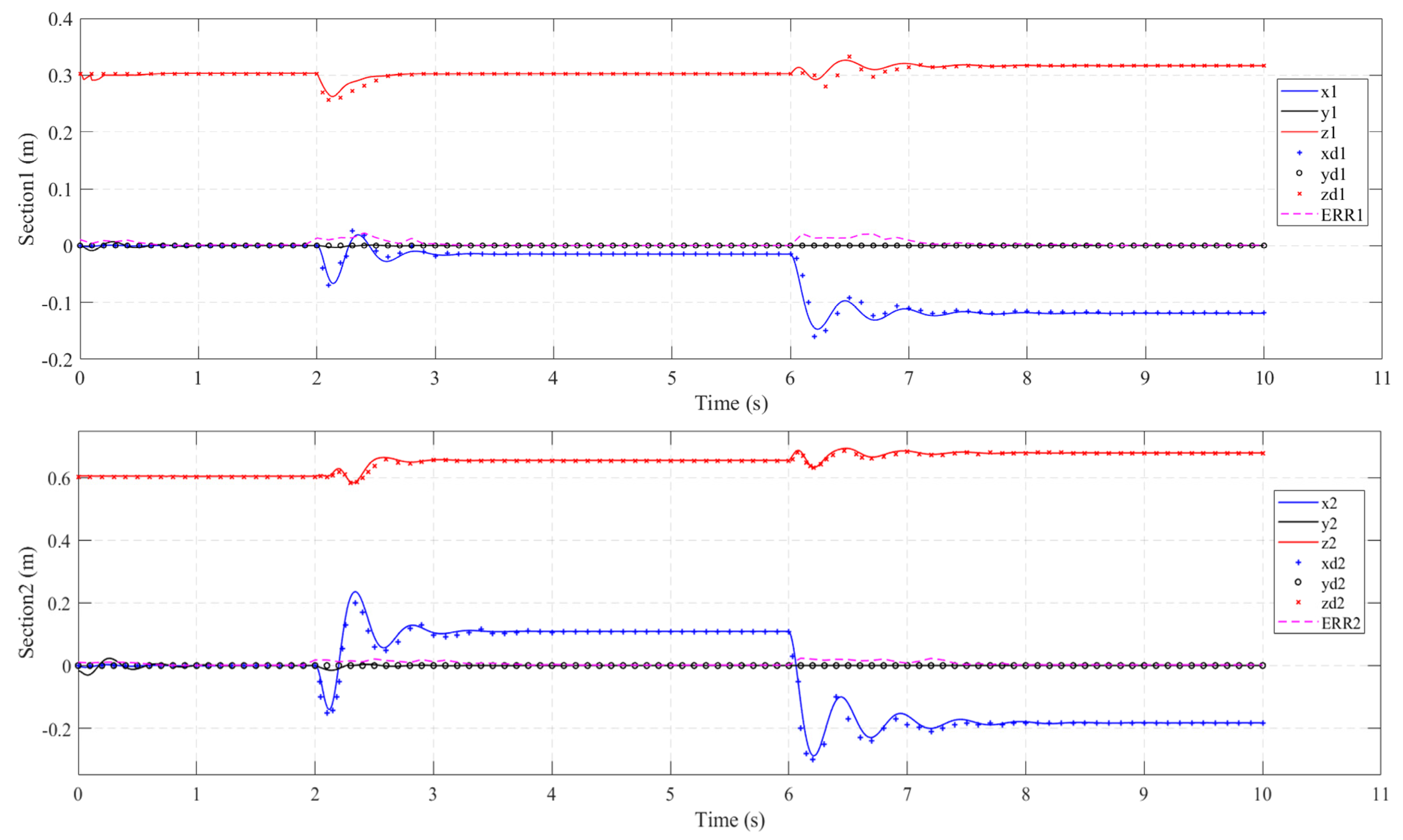
4.3.1. Step Input Torque
4.3.2. Ramp Input Torque
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, T.; Hao, Y.; Yang, X.; Wen, L. Soft robotics: Structure, actuation, sensing and control. J. Mech. Eng. 2017, 53, 1–13. [Google Scholar]
- Wang, H.; Peng, X.; Lin, B. Research development of soft robots. J. S. China Univ. Technol. 2020, 48, 98–110. [Google Scholar]
- Cao, Y.; Shang, J.; Liang, K.; Fan, D.; Ma, D.; Tang, L. Review of soft-bodied robots. J. Mech. Eng. 2012, 48, 9. [Google Scholar] [CrossRef]
- Yan, J.; Shi, P.; Zhang, X.; Zhao, J. Review of biomimetic mechanism, actuation, modeling and control in soft manipulator. J. Mech. Eng. 2018, 54, 1–14. [Google Scholar] [CrossRef]
- Yu, J.; Hao, G.; Chen, G.; Bi, S. State-of-art of compliant mechanisms and their applications. J. Mech. Eng. 2015, 51, 53–68. [Google Scholar] [CrossRef]
- Ricotti, L.; Trimmer, B.; Feinberg, A.W.; Raman, R.; Parker, K.K.; Bashir, R.; Sitti, M.; Martel, S.; Dario, P.; Menciassi, A. Biohybrid actuators for robotics: A review of devices actuated by living cells. Sci. Robot. 2017, 2, eaaq0495. [Google Scholar] [CrossRef] [Green Version]
- Hao, Y.; Gong, Z.; Xie, Z.; Guan, S.; Yang, X.; Ren, Z.; Wang, T.; Wen, L. Universal soft pneumatic robotic gripper with variable effective length. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 6109–6114. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Fei, Y.; Wang, J.; Pang, W. A Novel Fabric-Based Versatile and Stiffness-Tunable Soft Gripper Integrating Soft Pneumatic Fingers and Wrist. Soft Robot. 2019, 6, 1–20. [Google Scholar] [CrossRef]
- Ji, X.; Liu, X.; Cacucciolo, V.; Civet, Y.; El Haitami, A.; Cantin, S.; Perriard, Y.; Shea, H. Untethered feel-through haptics using 18-m thick dielectric elastomer actuators. Adv. Funct. Mater. 2021, 31, 2006639. [Google Scholar] [CrossRef]
- Jones, B.A.; Walker, I.D. Kinematics for multisection continuum robots. IEEE Trans. Robot. 2006, 22, 43–55. [Google Scholar] [CrossRef]
- Iii, R.J.W.; Jones, B.A. Design and kinematic modeling of constant curvature continuum robots: A review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar]
- Marchese, A.D.; Daniela, R. Design, kinematics, and control of a soft spatial fluidic elastomer manipulator. Int. J. Robot. Res. 2016, 35, 840–869. [Google Scholar] [CrossRef]
- Lindenroth, L.; Back, J.; Schoisengeier, A.; Noh, Y.; Wurdemann, H.; Althoefer, K.; Liu, H. Stiffness-based modelling of a hydraulically-actuated soft robotics manipulator. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 2458–2463. [Google Scholar] [CrossRef] [Green Version]
- Gong, Z.; Xie, Z.; Yang, X.; Wang, T.; Wen, L. Design, fabrication and kinematic modeling of a 3D-motion soft robotic arm. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 509–514. [Google Scholar] [CrossRef]
- Chen, Y.; Li, W.; Gong, Y. Static modeling and analysis of soft manipulator considering environment contact based on segmented constant curvature method. Ind. Robot. Int. J. 2020, 48, 233–246. [Google Scholar] [CrossRef]
- Webster, I.R.J.; Romano, J.M.; Cowan, N.J. Mechanics of Precurved-Tube Continuum Robots. IEEE Trans. Robot. 2008, 25, 67–78. [Google Scholar] [CrossRef]
- Camarillo, D.B.; Milne, C.F.; Carlson, C.R.; Zinn, M.R.; Salisbury, J.K. Mechanics Modeling of Tendon-Driven Continuum Manipulators. IEEE Trans. Robot. 2008, 24, 1262–1273. [Google Scholar] [CrossRef]
- Trivedi, D.; Lotfi, A.; Rahn, C.D. Geometrically Exact Models for Soft Robotic Manipulators. IEEE Trans. Robot. 2008, 24, 773–780. [Google Scholar] [CrossRef]
- Renda, F.; Cianchetti, M.; Giorelli, M.; Arienti, A.; Laschi, C. A 3D steady-state model of a tendon-driven continuum soft manipulator inspired by the octopus arm. Bioinspir. Biomim. 2012, 7, 025006. [Google Scholar] [CrossRef]
- Kai, X.; Nabil, S. Analytic formulation for kinematics, statics, and shape restoration of multibackbone continuum robots via elliptic integrals. J. Mech. Robot. 2010, 2, 011006-1–011006-13. [Google Scholar]
- Walker, I.D. Continuous backbone “continuum” robot manipulators. ISRN Robot. 2014, 2013, 726506. [Google Scholar] [CrossRef] [Green Version]
- Jung, J.; Penning, R.S.; Zinn, M.R. A modeling approach for continuum robotic manipulators: Effects of nonlinear internal device friction. Adv. Robot. 2014, 28, 557–572. [Google Scholar] [CrossRef]
- Mochiyama, H.; Suzuki, T. Kinematics and dynamics of a cable-like hyper-exible manipulator. Robotics and Automation. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003. [Google Scholar]
- Tatlicioglu, E.; Walker, I.D.; Dawson, D.M. New dynamic models for planar extensible continuum robot manipulators. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1485–1490. [Google Scholar] [CrossRef]
- Giri, N.; Walker, I.D. Three module lumped element model of a continuum arm section. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Xu, F. Underwater dynamic modeling for a cable-driven soft robot arm. IEEE/ASME Trans. Mechatron. 2018, 23, 2726–2738. [Google Scholar] [CrossRef]
- Renda, F.; Cacucciolo, V.; Dias, J.; Seneviratne, L. Discrete Cosserat approach for soft robot dynamics: A new piece-wise constant strain model with torsion and shears. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 5495–5502. [Google Scholar] [CrossRef]
- Rubin, M.; Cardon, A. Cosserat Theories: Shells, Rods and Points. Solid Mechanics and its Applications, Vol 79. Appl. Mech. Rev. 2002, 55, B109–B110. [Google Scholar] [CrossRef]
- Chikhaoui, M.T.; Lilge, S.; Kleinschmidt, S.; Burgner-Kahrs, J. Comparison of modeling approaches for a tendon actuated continuum robotwith three extensible segments. IEEE Robot. Autom. Lett. 2019, 4, 989–996. [Google Scholar] [CrossRef]
- Falkenhahn, V.; Mahl, T.; Hildebrandt, A.; Neumann, R.; Sawodny, O. Dynamic Modeling of Bellows-Actuated Continuum Robots Using the Euler–Lagrange Formalism. IEEE Trans. Robot. 2015, 31, 1483–1496. [Google Scholar] [CrossRef]
- Yang, B.; Chen, W.; Liang, X.; Pfeifer, R.W. Visual servoing of soft robot manipulator in constrained environments with an adaptive controller. IEEE/ASME Trans. Mechatron. 2016, 22, 41–50. [Google Scholar]
- Khalil, W.; Gallot, G.; FrÉdÉric, B. Dynamic modeling and simulation of a 3-d serial eel-like robot. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1259–1268. [Google Scholar] [CrossRef]
- Bucolo, M.; Buscarino, A.; Famoso, C.; Fortuna, L.; Frasca, M. Control of imperfect dynamical systems. Nonlinear Dyn. 2019, 98, 2989–2999. [Google Scholar] [CrossRef]
- Gagliano, S.; Stella, G.; Bucolo, A.M. Real-Time Detection of Slug Velocity in Microchannels. Micromachines 2020, 11, 241. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marchese, A.D.; Komorowski, K.; Onal, C.D.; Rus, D. Design and control of a soft and continuously deformable 2D robotic manipulation system. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2189–2196. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value |
|---|---|
| l0 | 0.25 m |
| E | 1.2 MPa |
| K | 2.18 × 109 Pa |
| Ad | 3.14 × 10−4 m2 |
| Ac | 0.0021 m2 |
| As | 3.93 × 10−4 m2 |
| lp | 1.61 m |
| η | 0.9 |
| mb | 1.2 kg |
| s | 4 mm |
| μ | 1.01 × 10−3 Pa·s |
| V1 | 7.85 × 10−5 m3 |
| V2 | 7.35 × 10−4 m3 |
| dp | 0.004 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Sun, Q.; Guo, Q.; Gong, Y. Dynamic Modeling and Experimental Validation of a Water Hydraulic Soft Manipulator Based on an Improved Newton—Euler Iterative Method. Micromachines 2022, 13, 130. https://doi.org/10.3390/mi13010130
Chen Y, Sun Q, Guo Q, Gong Y. Dynamic Modeling and Experimental Validation of a Water Hydraulic Soft Manipulator Based on an Improved Newton—Euler Iterative Method. Micromachines. 2022; 13(1):130. https://doi.org/10.3390/mi13010130
Chicago/Turabian StyleChen, Yinglong, Qiang Sun, Qiang Guo, and Yongjun Gong. 2022. "Dynamic Modeling and Experimental Validation of a Water Hydraulic Soft Manipulator Based on an Improved Newton—Euler Iterative Method" Micromachines 13, no. 1: 130. https://doi.org/10.3390/mi13010130
APA StyleChen, Y., Sun, Q., Guo, Q., & Gong, Y. (2022). Dynamic Modeling and Experimental Validation of a Water Hydraulic Soft Manipulator Based on an Improved Newton—Euler Iterative Method. Micromachines, 13(1), 130. https://doi.org/10.3390/mi13010130