
Hysteresis Modeling and Compensation of Fast Steering Mirrors with Hysteresis Operator Based Back Propagation Neural Networks

Abstract
:1. Introduction
2. Hysteresis Model
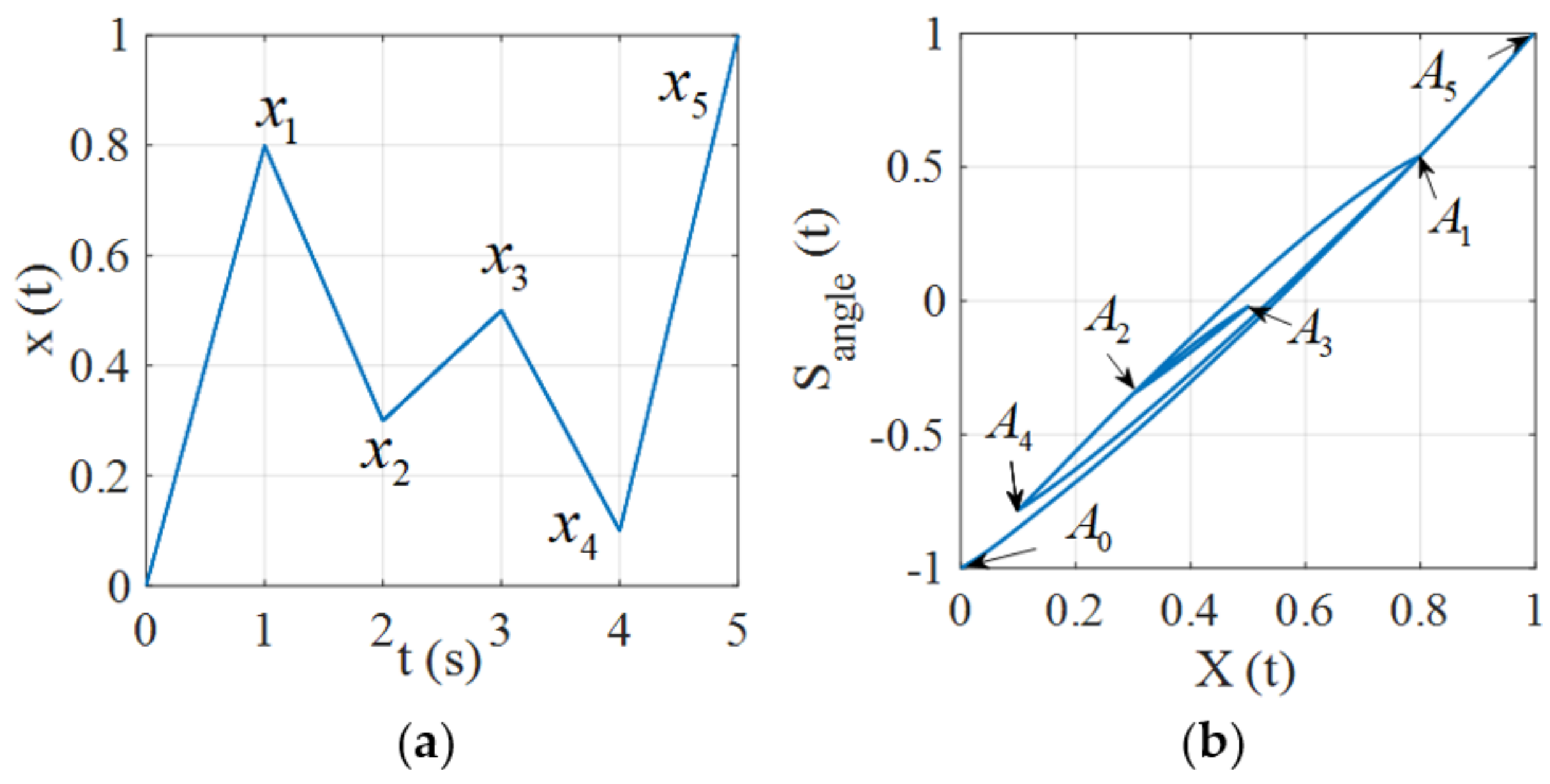
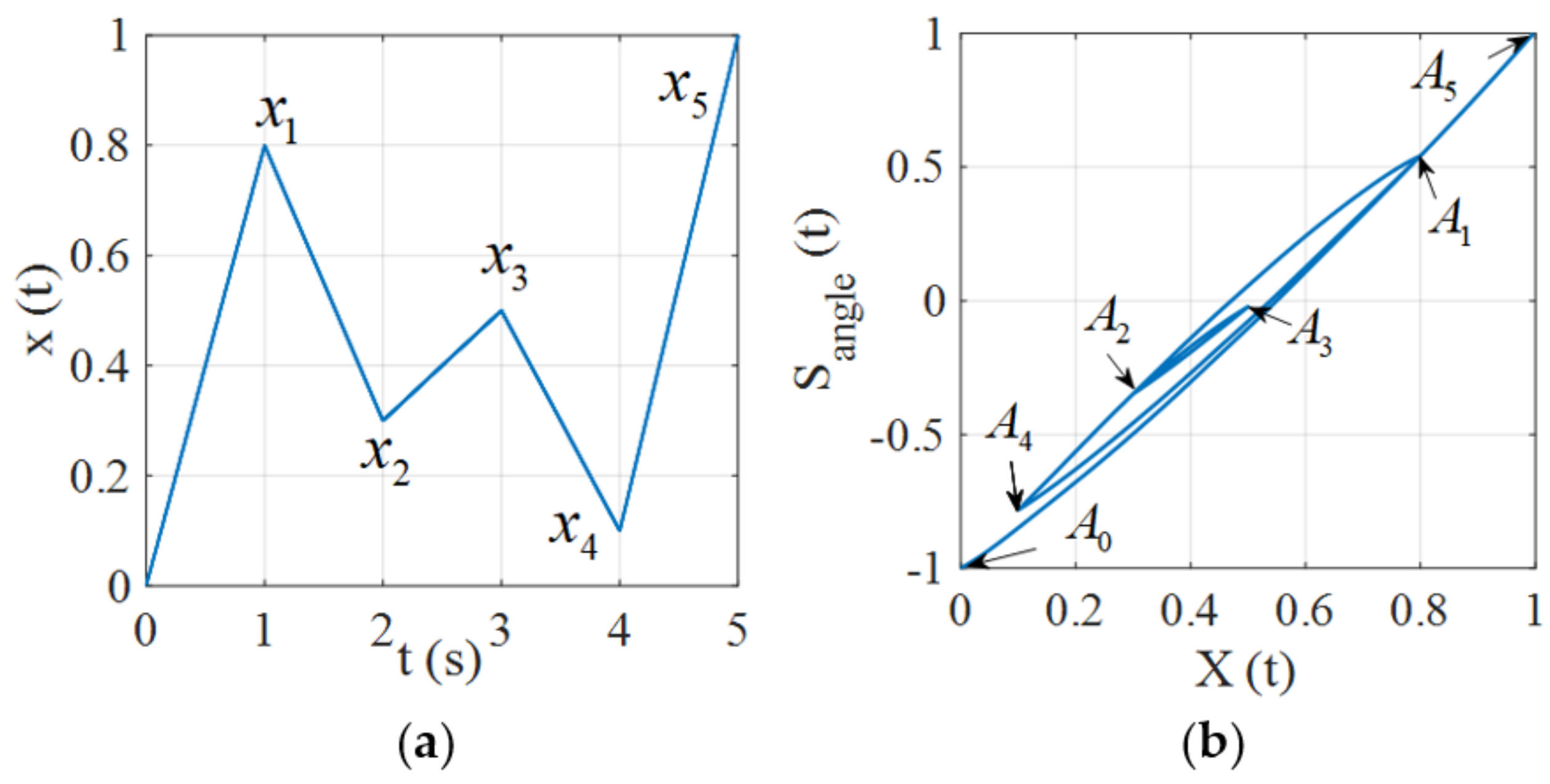
2.1. Hysteresis Operator Based on Madelung’s Rules
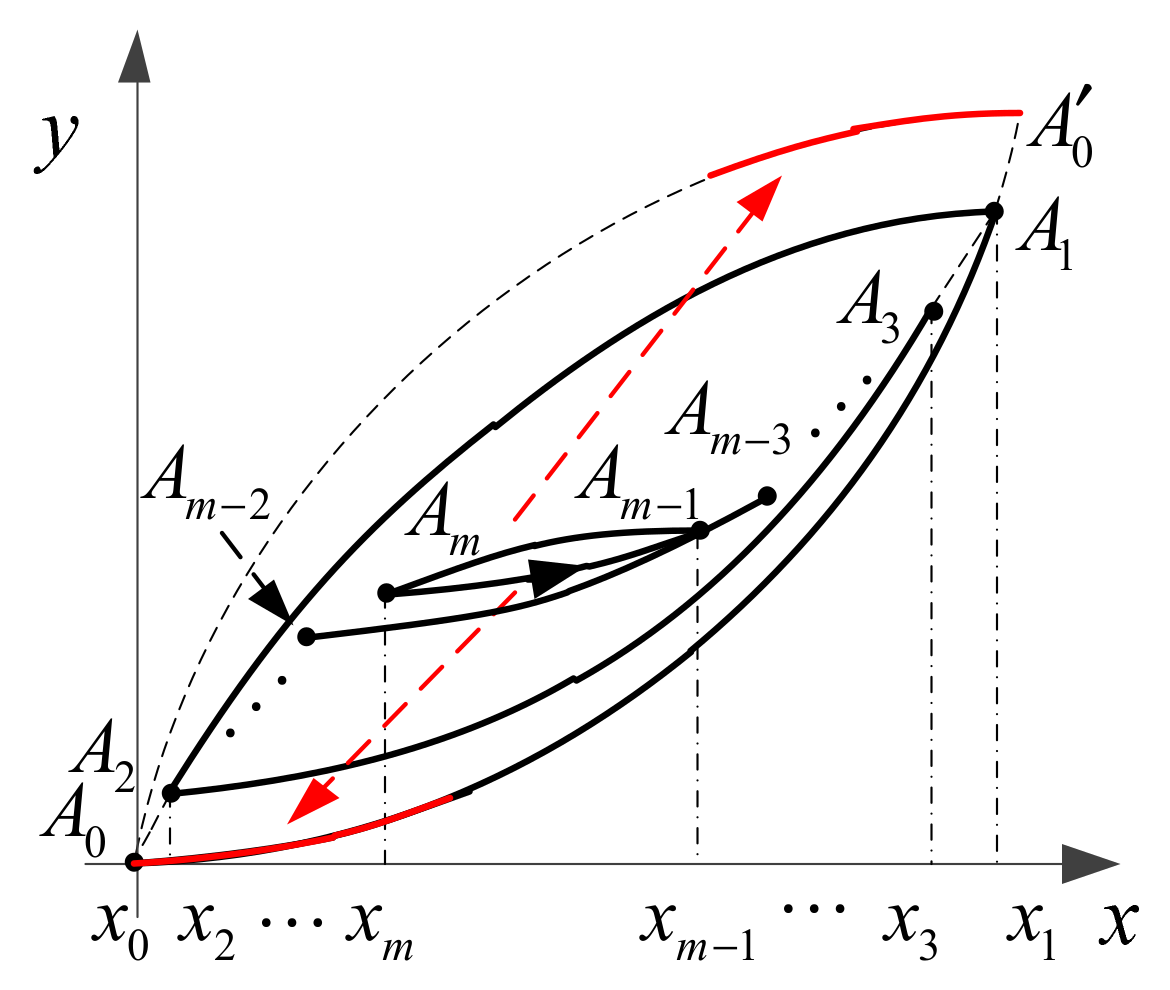
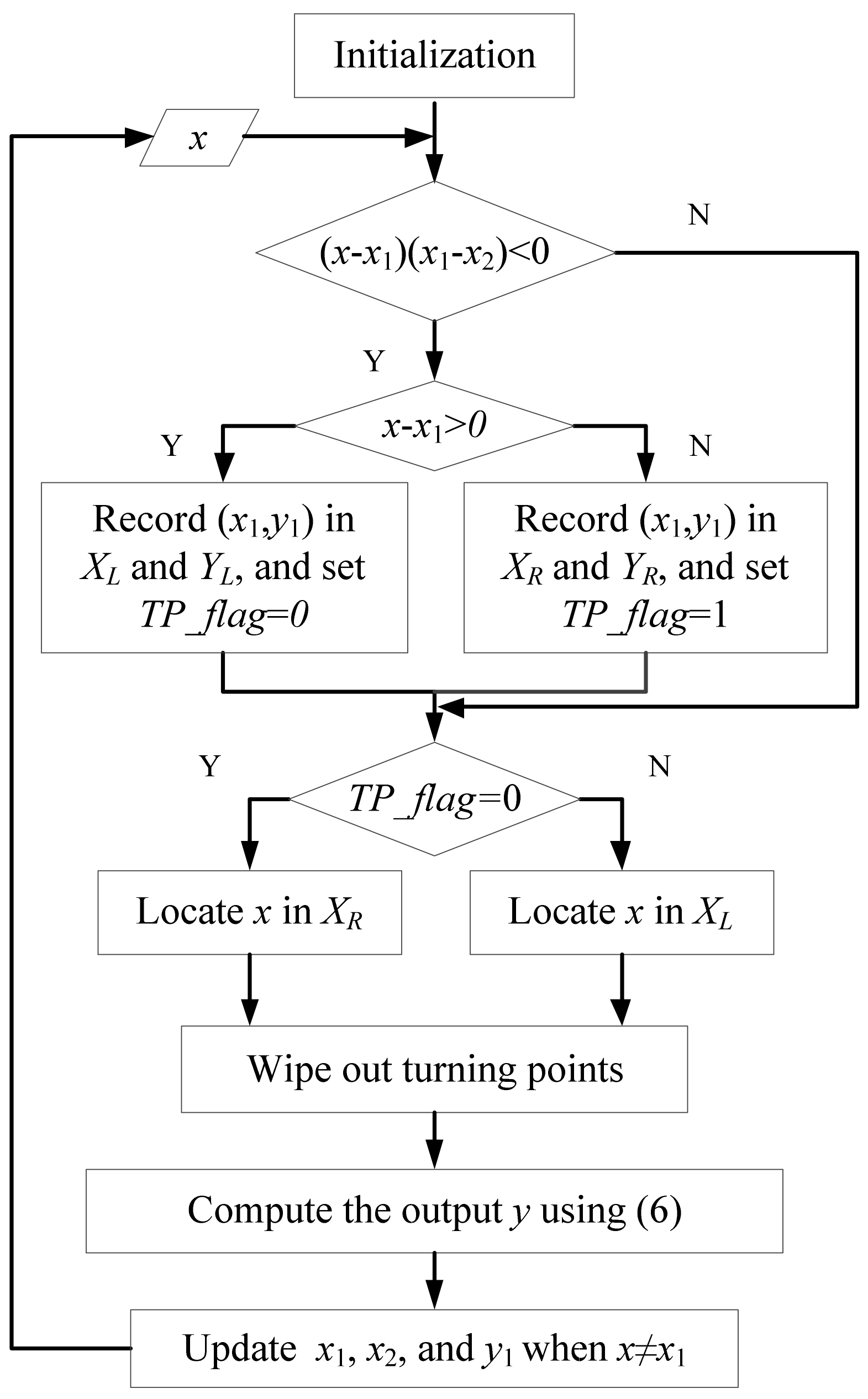
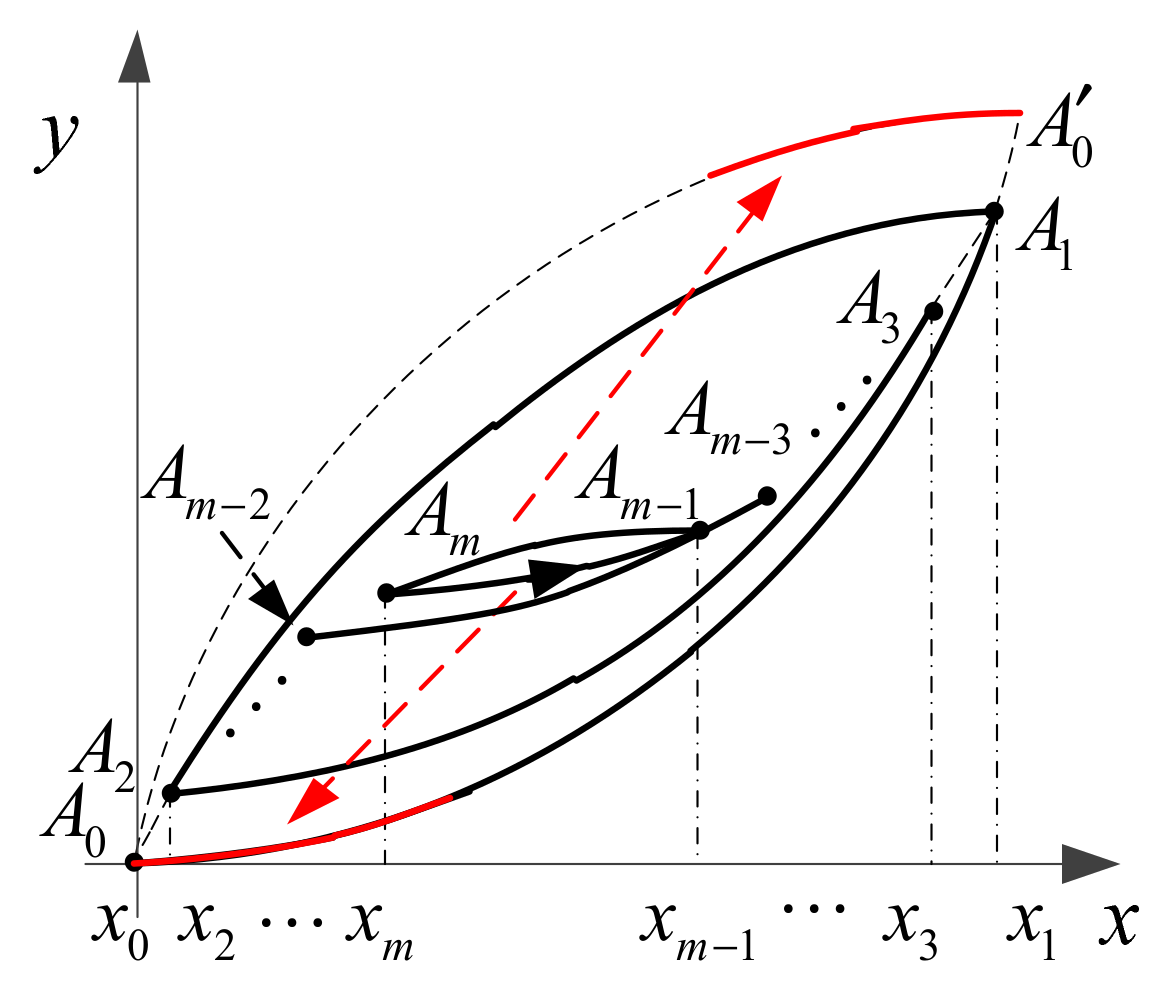
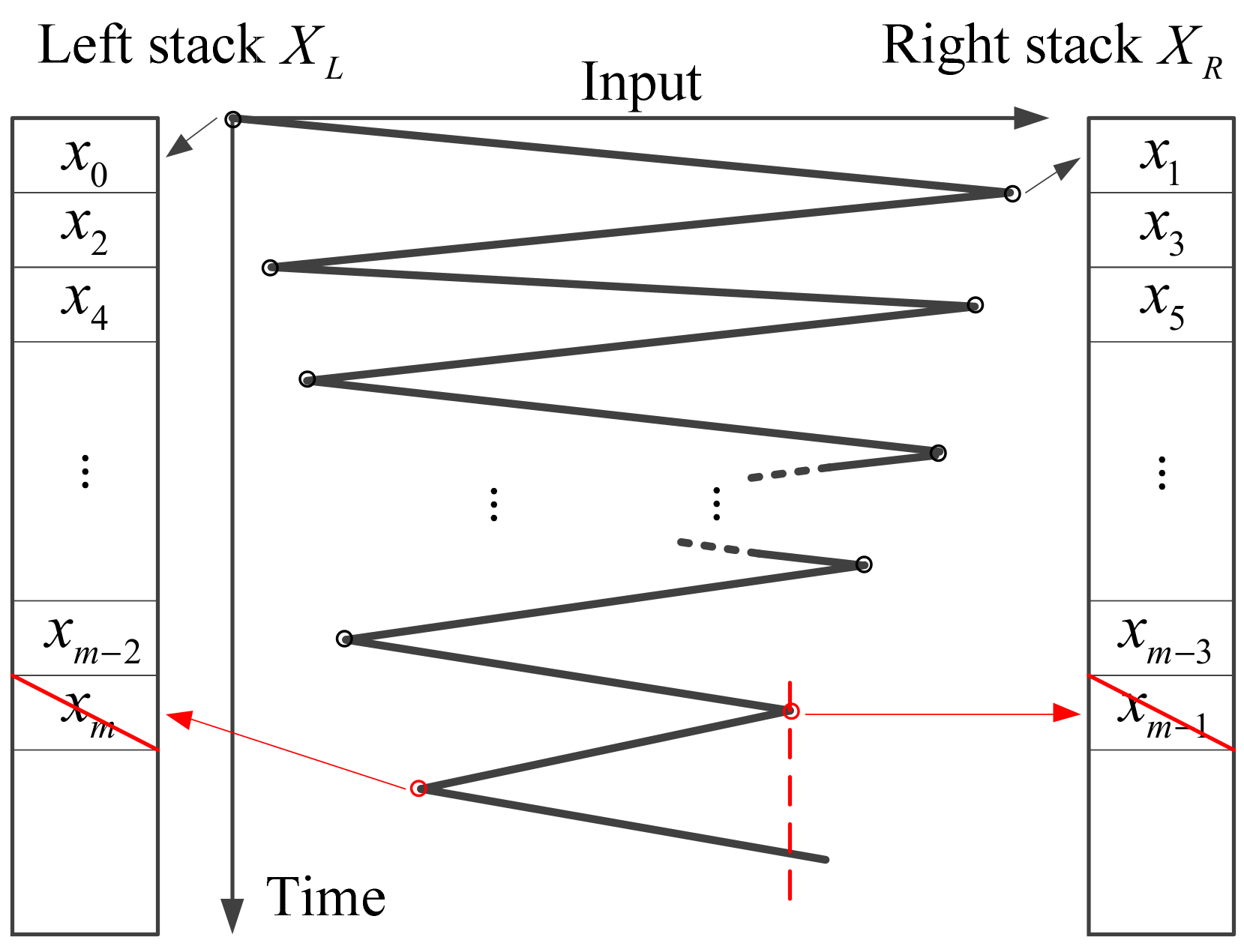
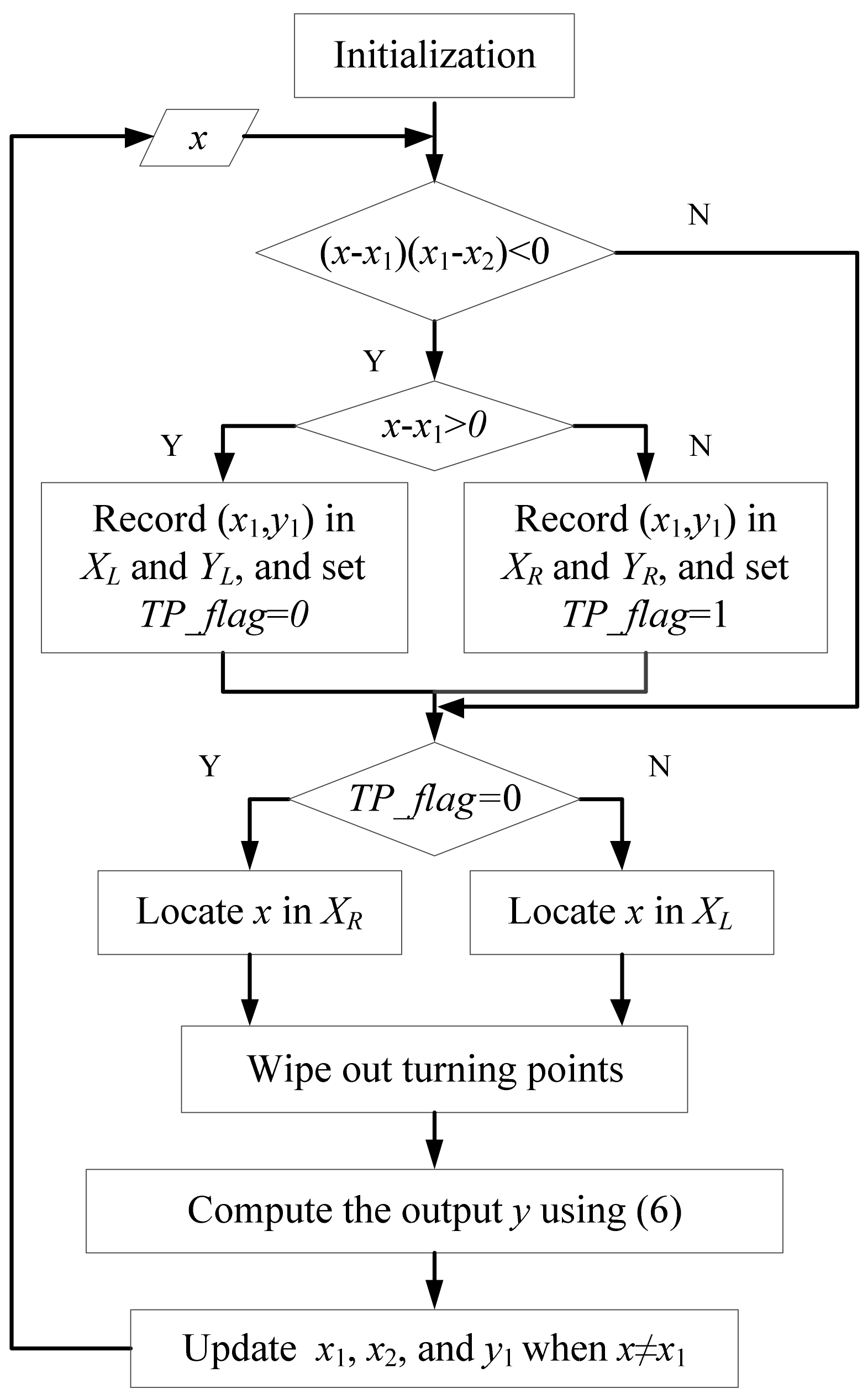
2.1.1. Madelung’s Rules and Its Application in Finding the CTP (Current Turning Point)
2.1.2. Description of Hysteresis Curves
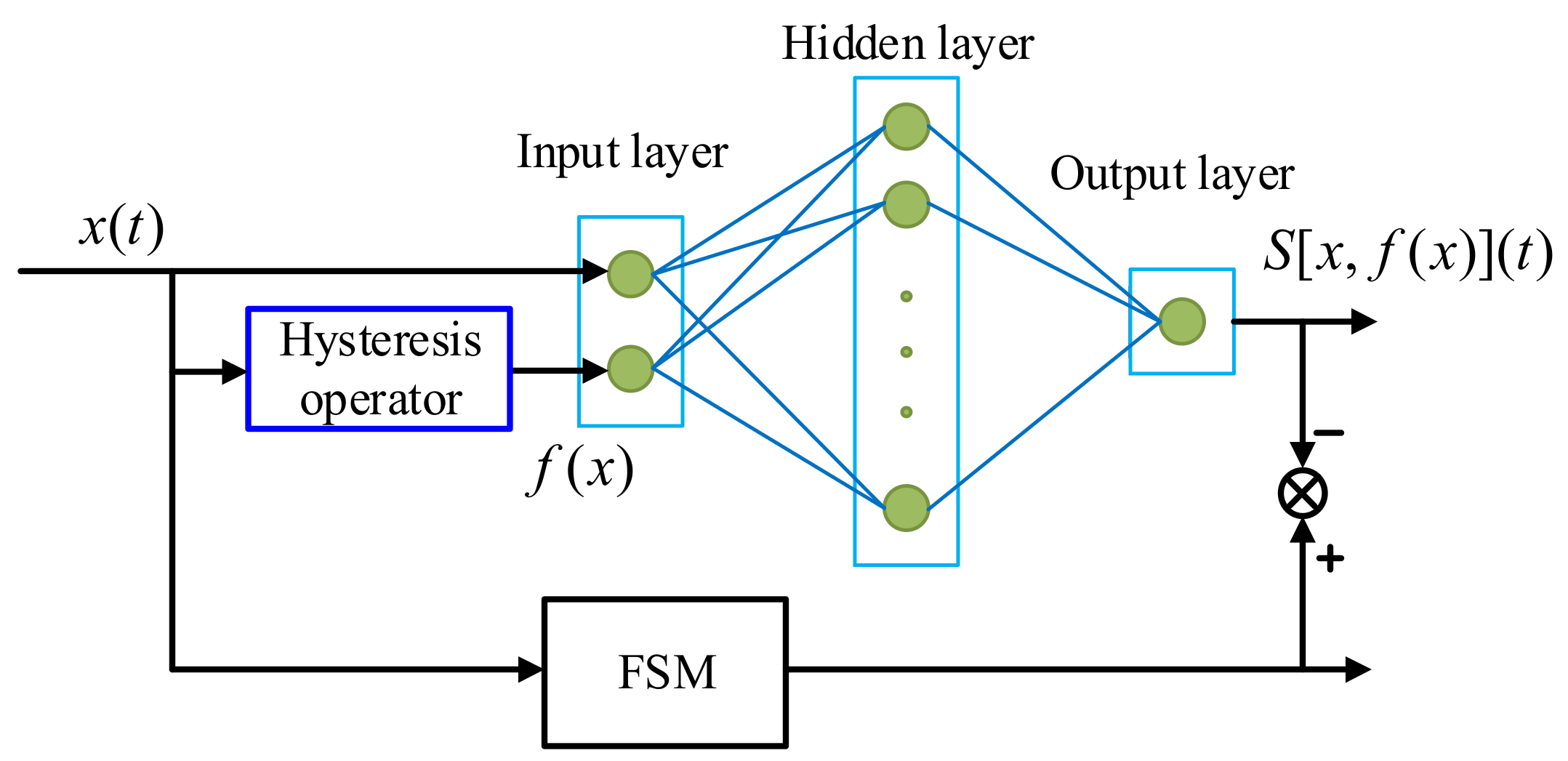
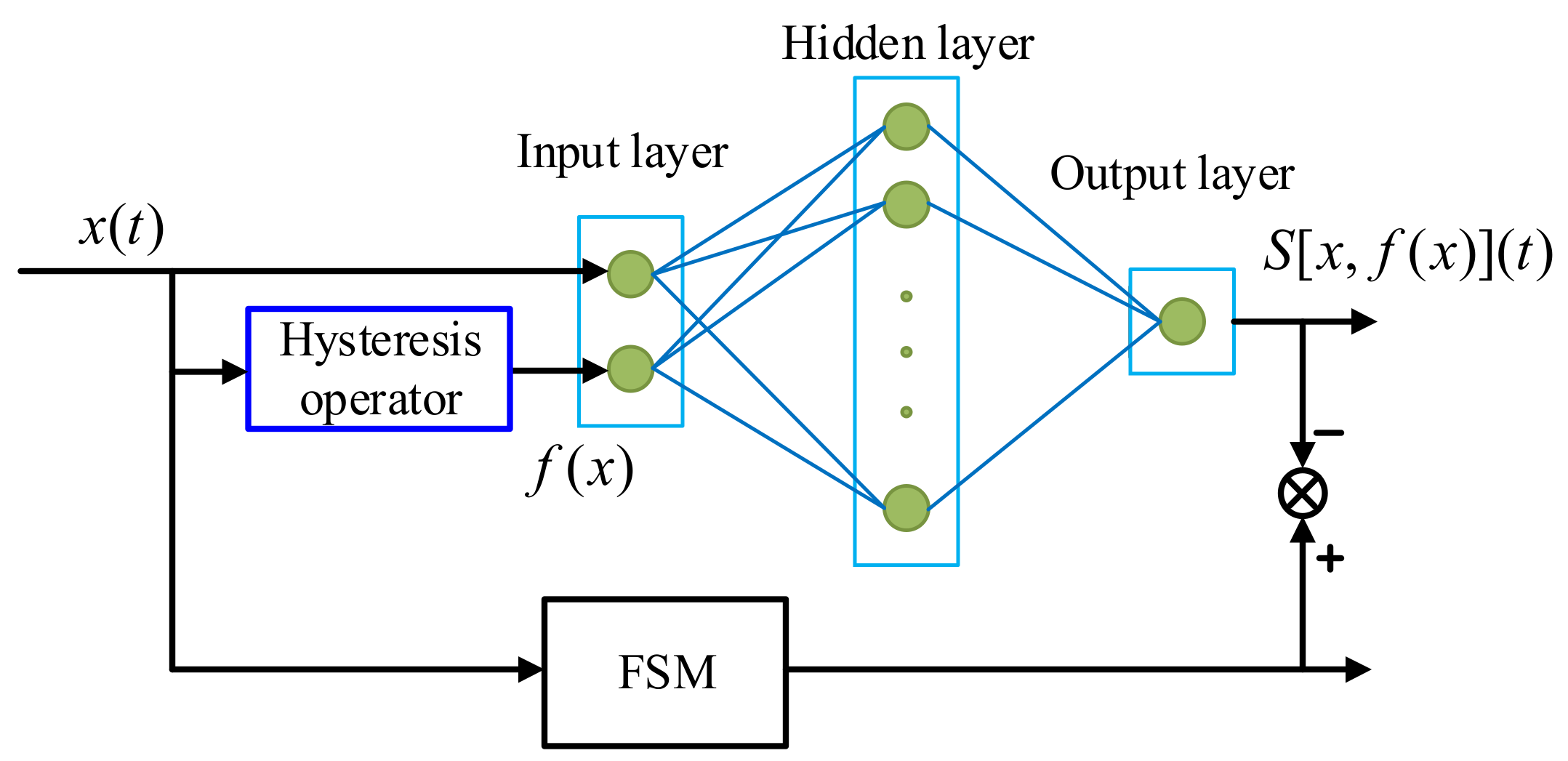
2.2. BP Neural Network
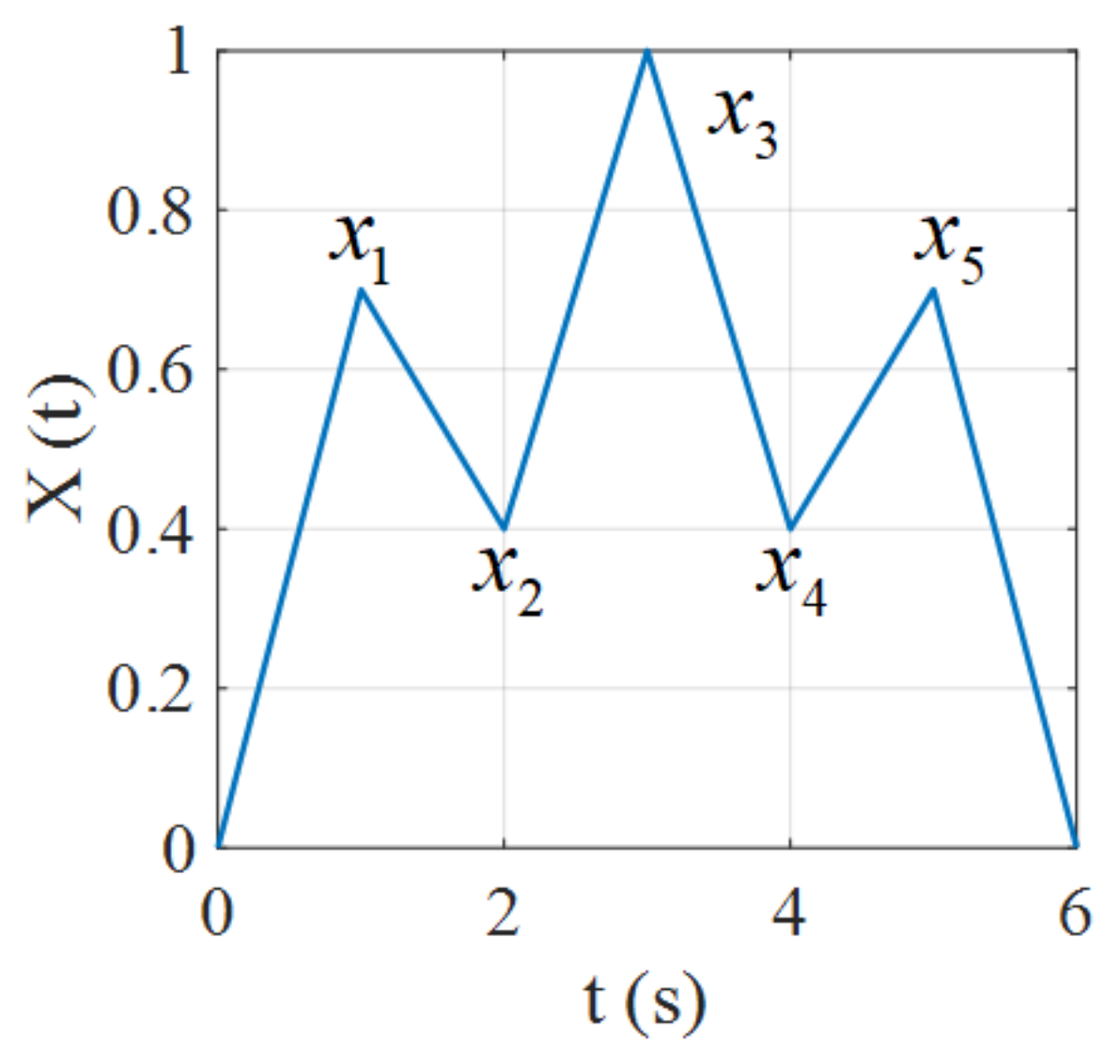
3. Wiping-Out and Congruency Properties
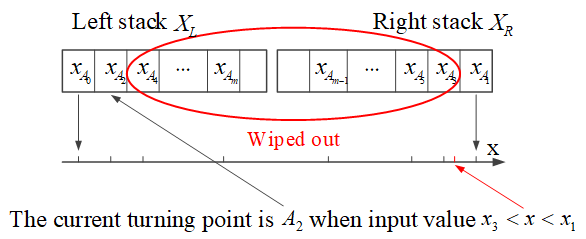
3.1. Wiping-Out Property
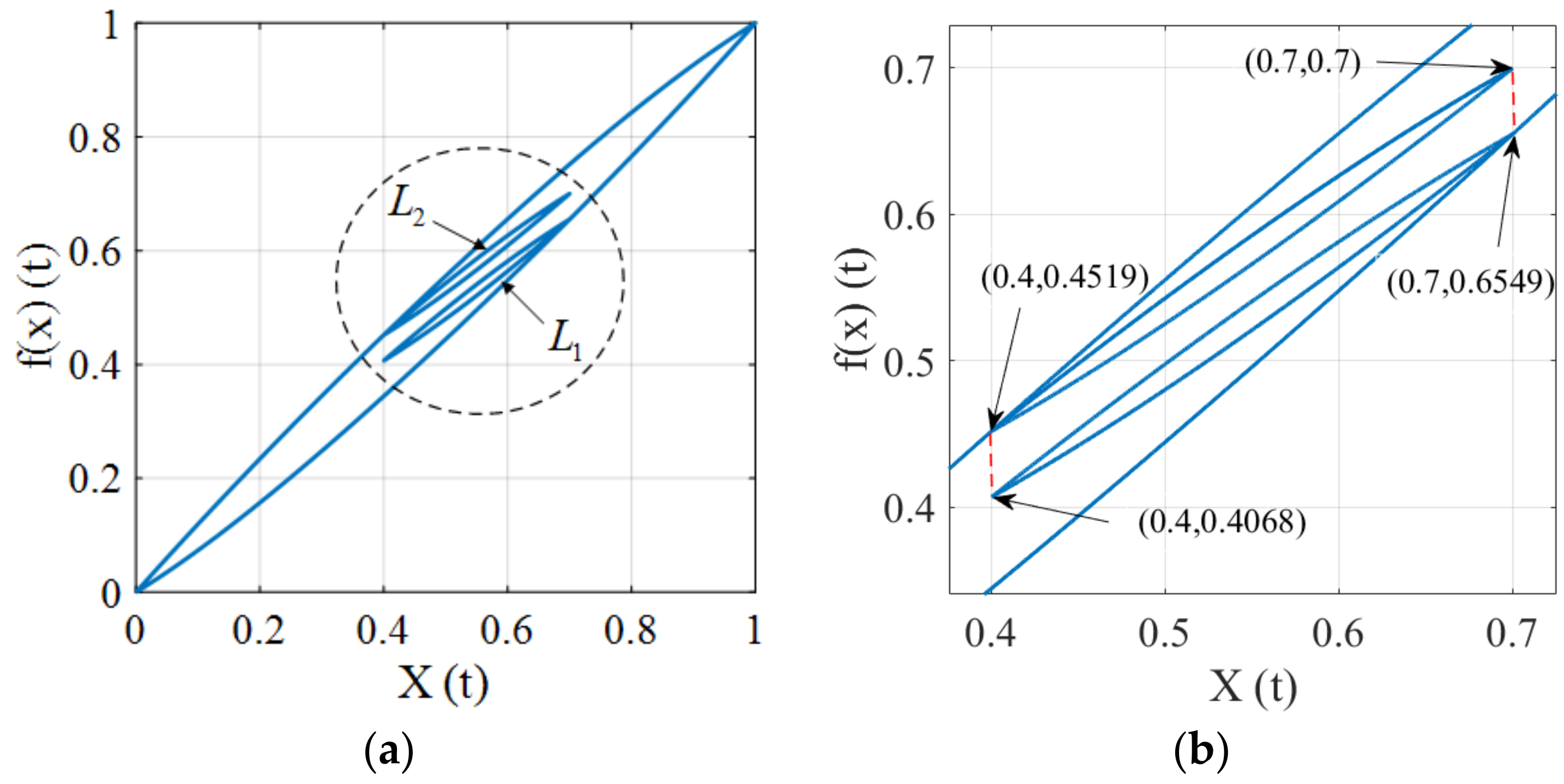
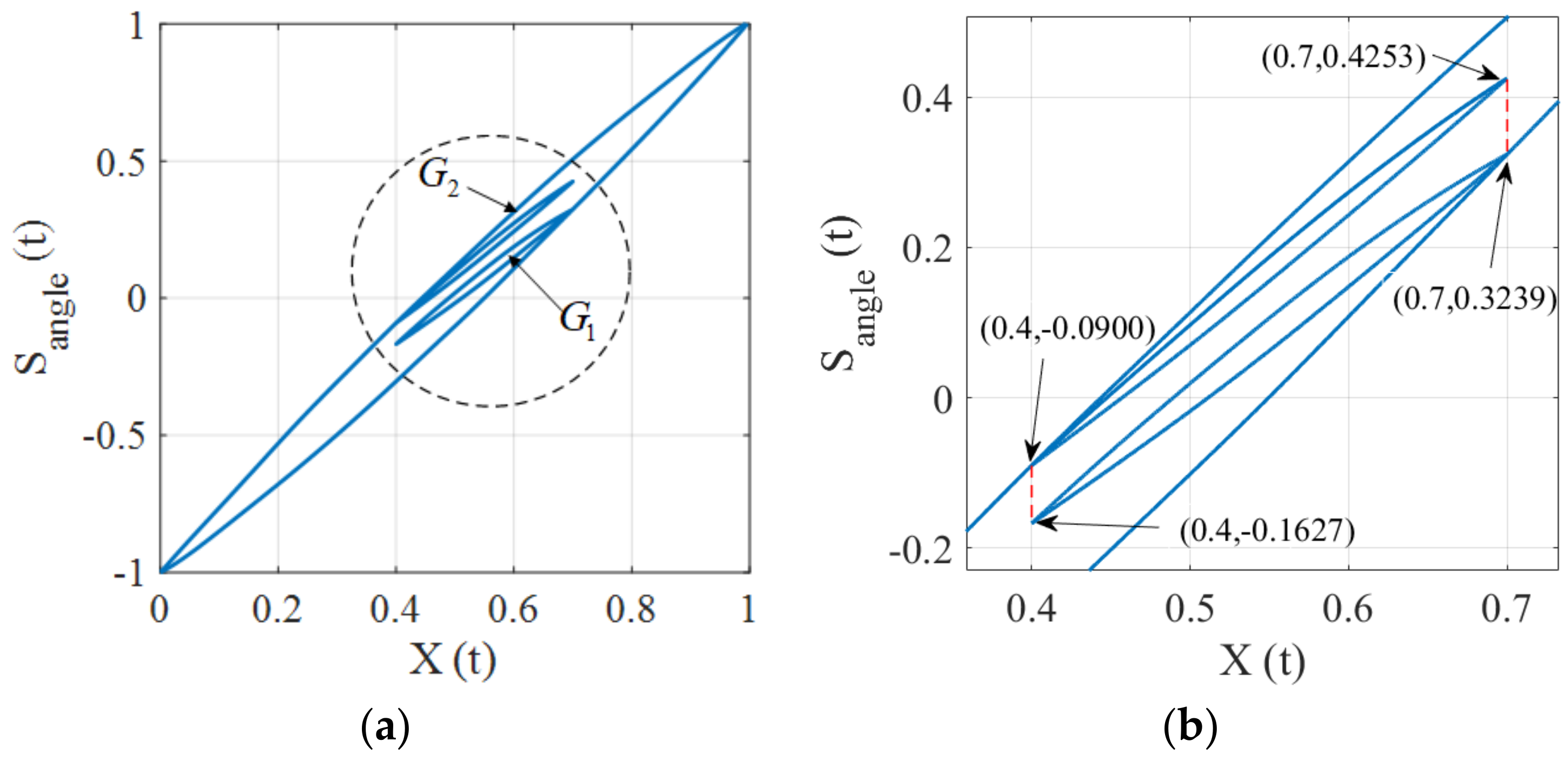
3.2. Congruency Property
4. Experimental Verification
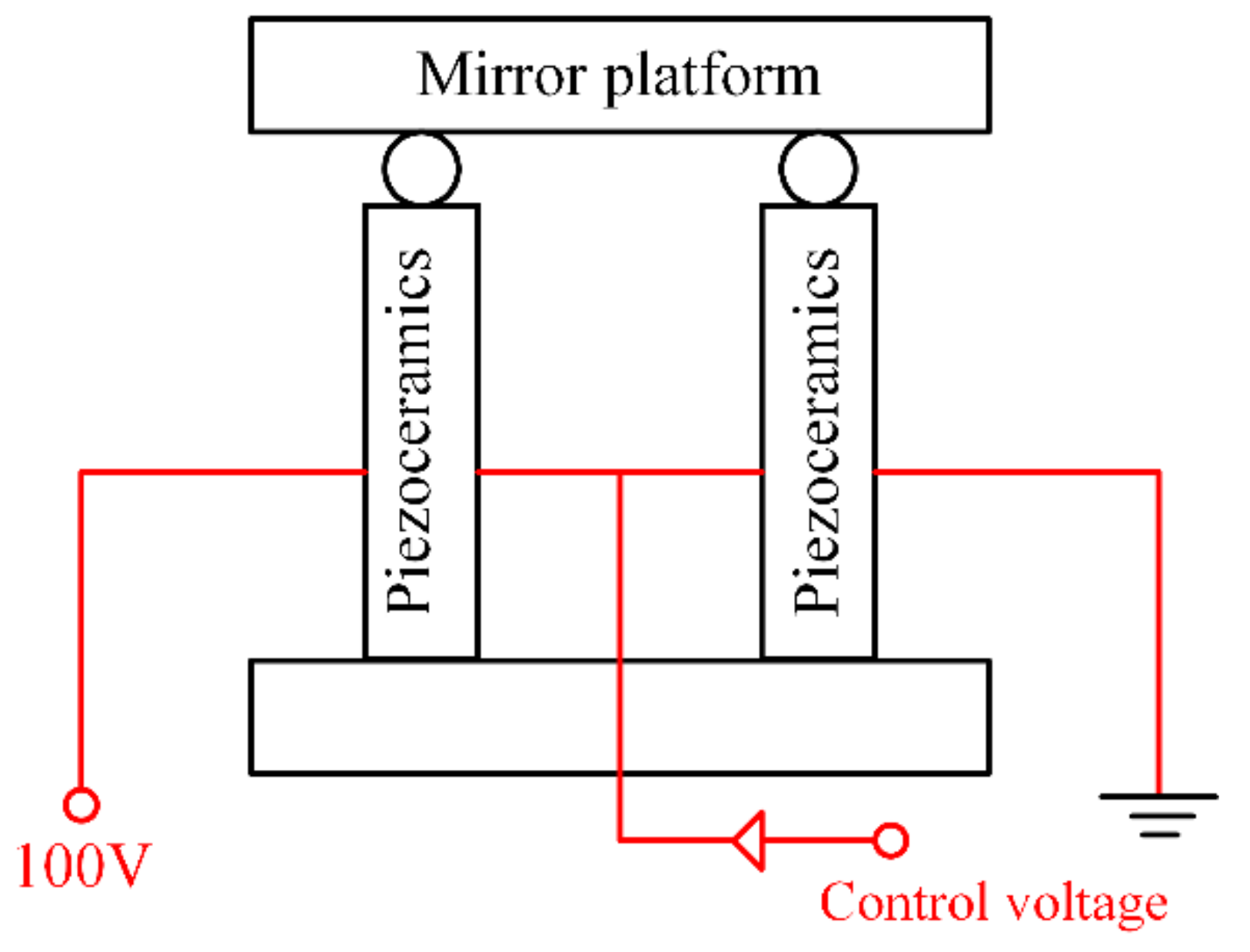
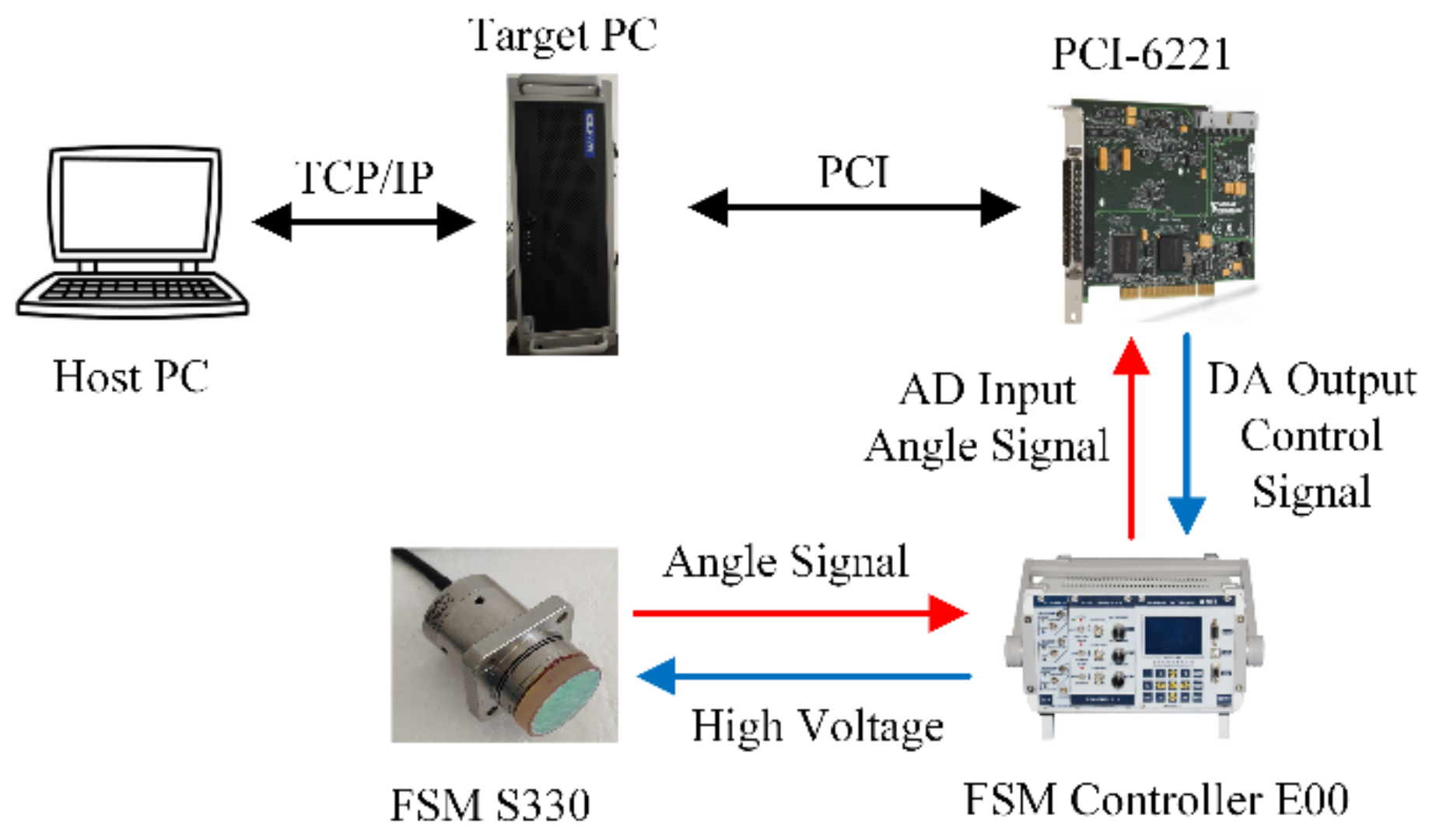
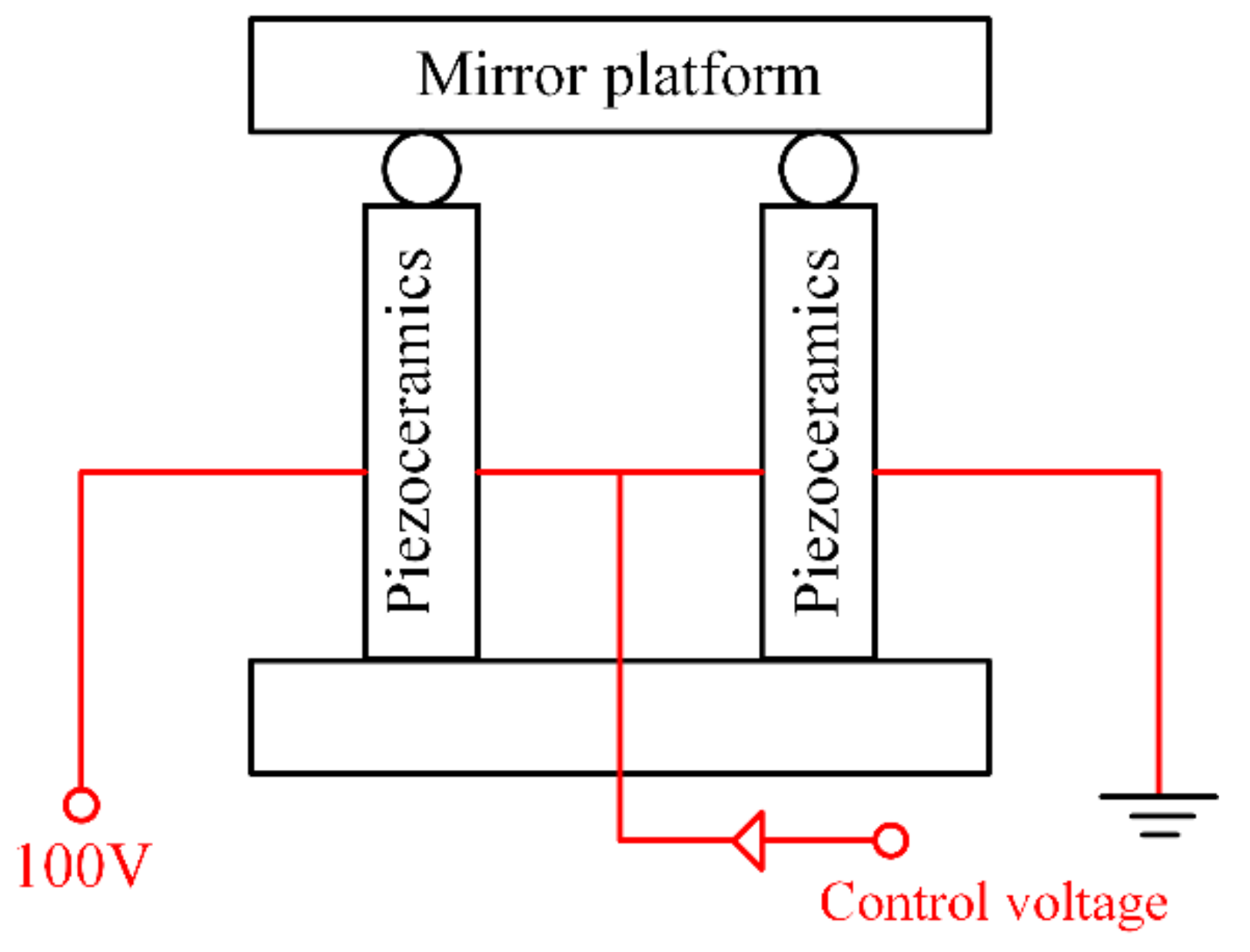
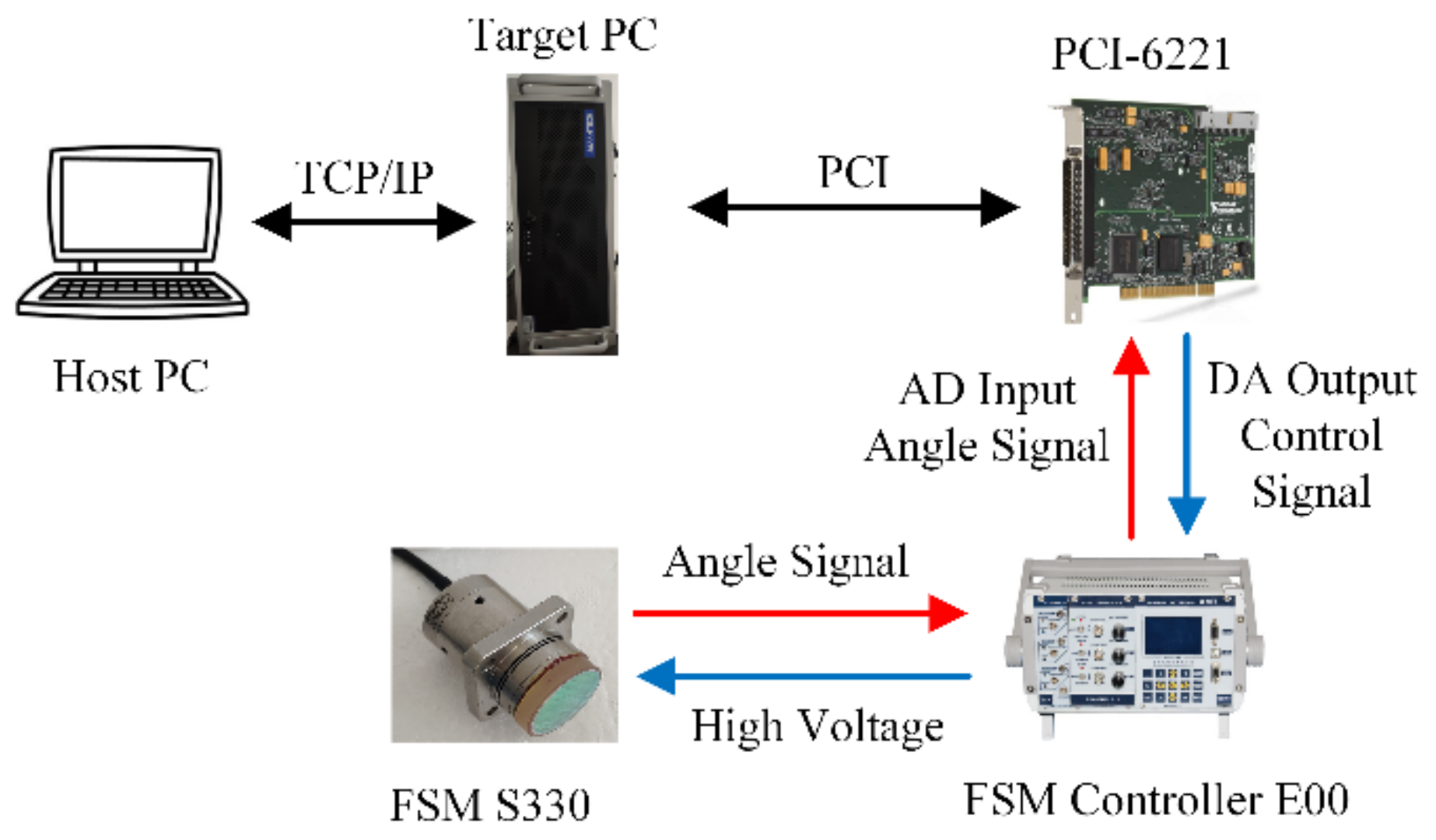
4.1. Experimental Setup
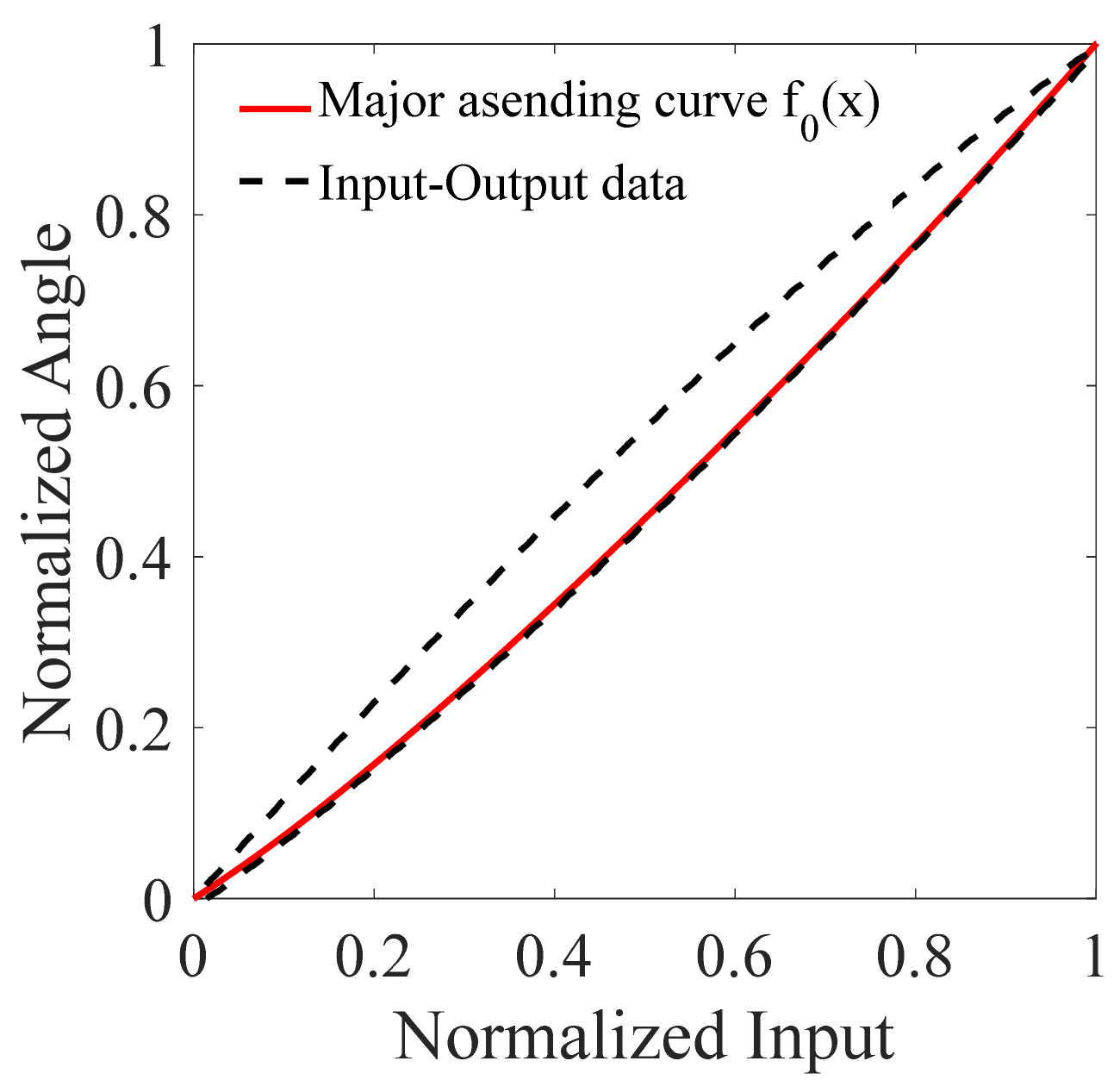
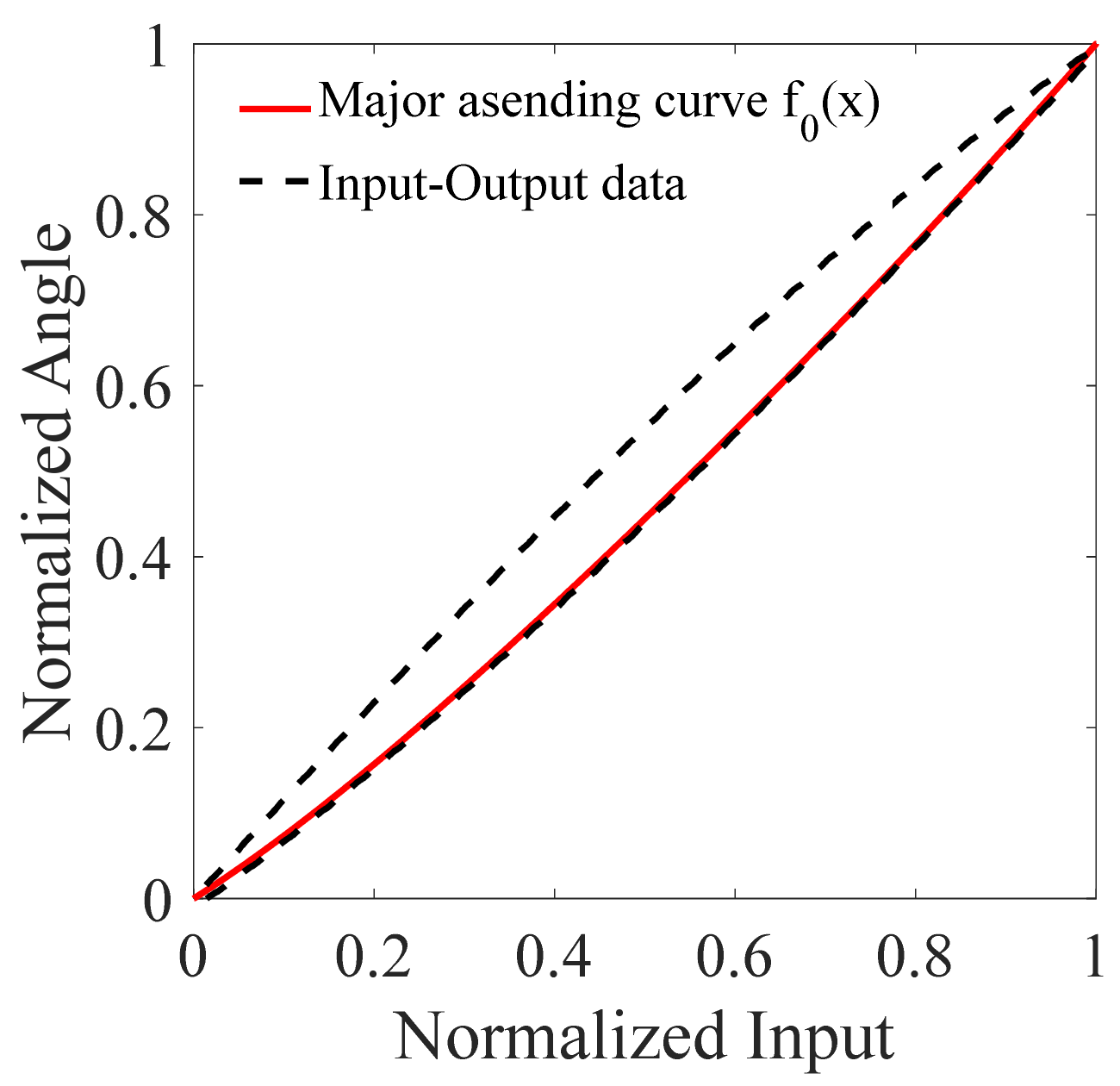
4.2. Parameter Identification
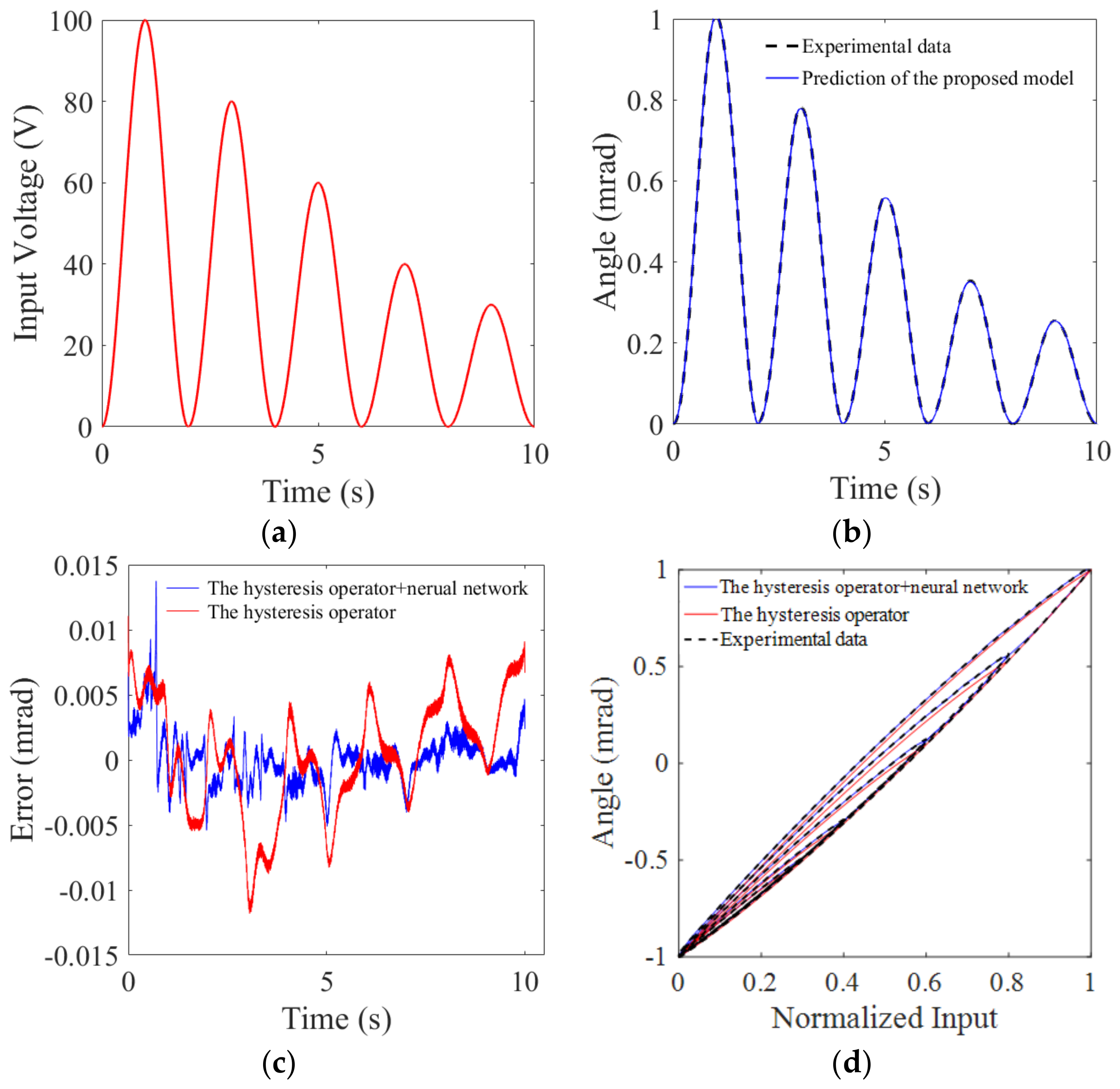
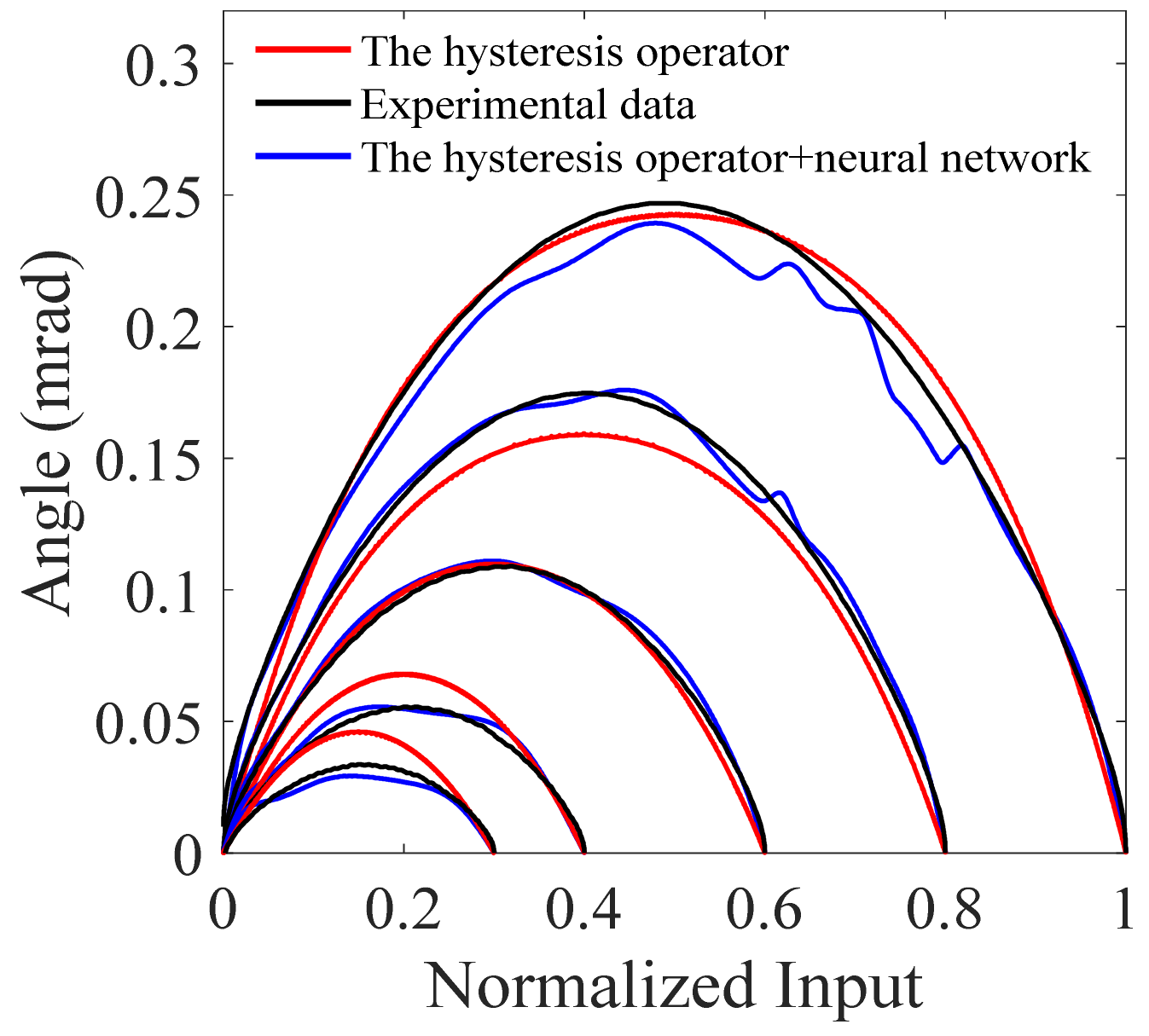
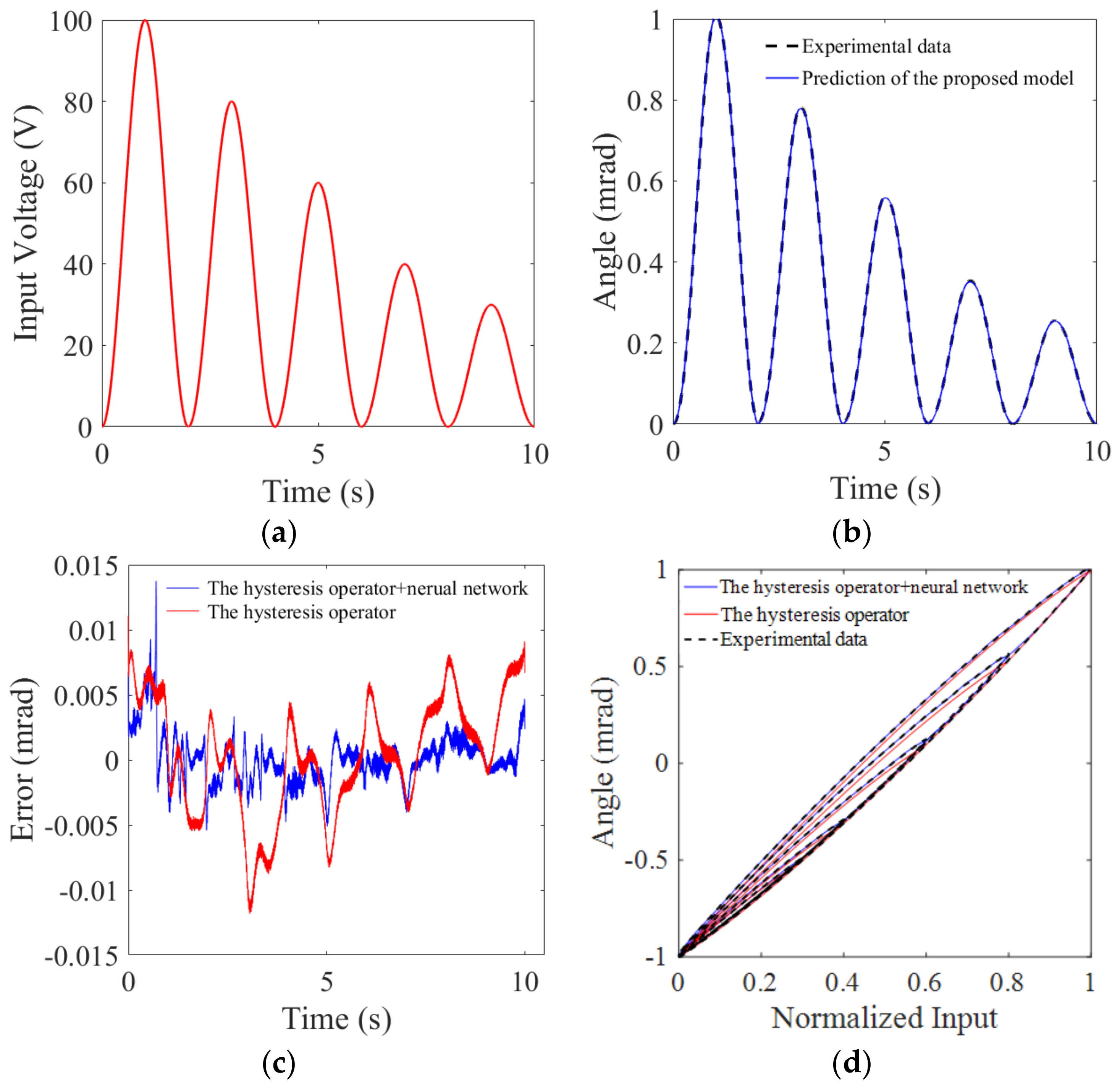
4.3. Hysteresis Description Results
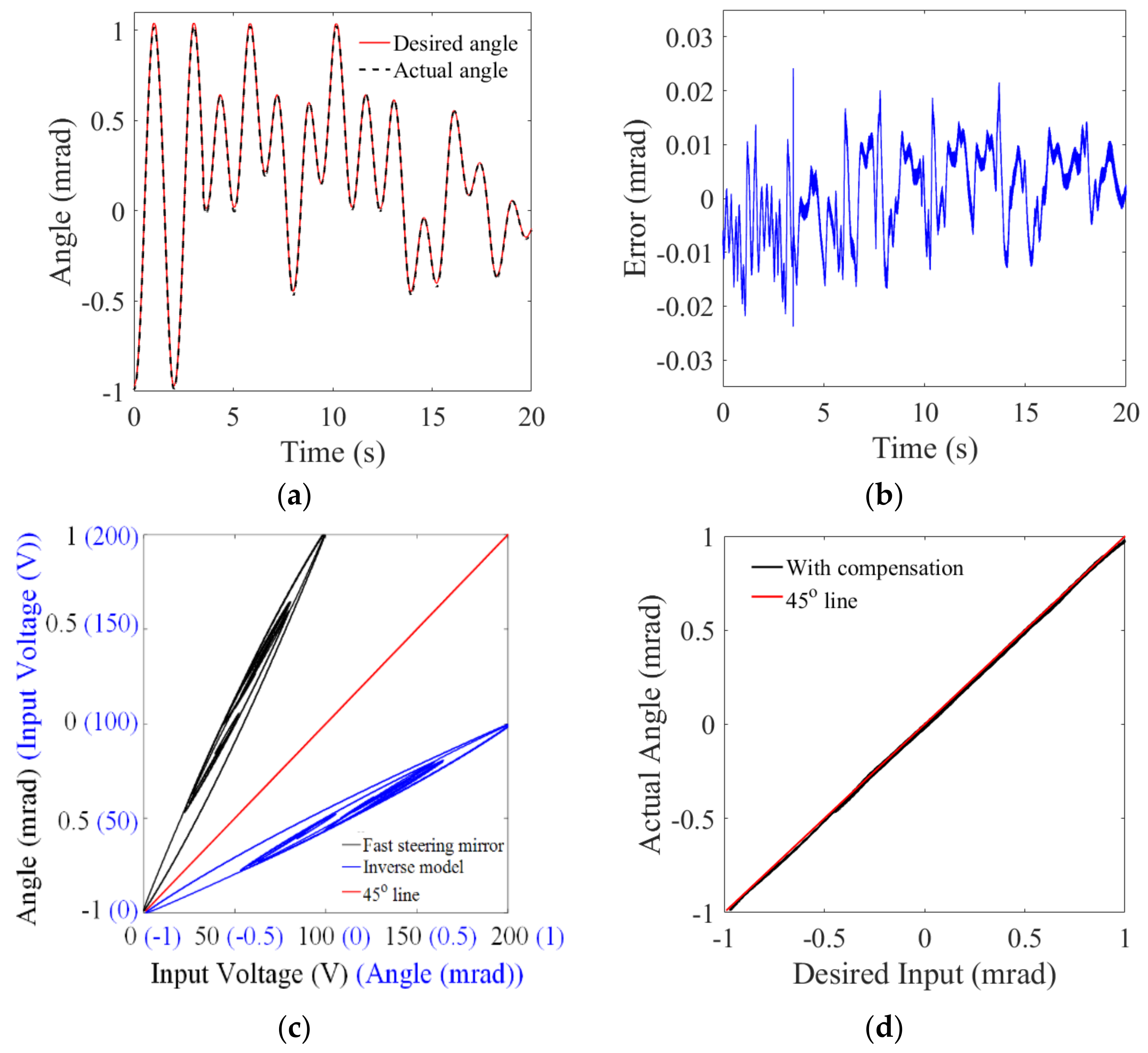
4.4. Hysteresis Compensation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, J.; Huang, L.; Hou, L.; He, G.; Song, Q.; Huang, H. Study of active beam steering system with a simple method. Chin. Opt. Lett. 2014, 12, 55–59. [Google Scholar]
- Qin, F.; Zhang, D.; Xing, D.; Xu, D.; Li, J. Laser beam pointing control with piezoelectric actuator model learning. IEEE Trans. Syst. Man. Cybern. Syst. 2020, 50, 1024–1034. [Google Scholar] [CrossRef]
- Chang, H.; Ge, W.; Wang, H.; Yuan, H.; Fan, Z. Laser beam pointing stabilization control through disturbance classification. Sensors 2021, 21, 1946. [Google Scholar] [CrossRef]
- Li, Z.; Shan, J. Modeling and inverse compensation for coupled hysteresis in piezo-actuated Fabry-Perot spectrometer. IEEE/ASME Trans. Mechatron. 2017, 22, 1903–1913. [Google Scholar] [CrossRef]
- Mayergoyz, I.D. Mathematical models of hysteresis. Phys. Rev. Lett. 1986, 56, 1518–1521. [Google Scholar] [CrossRef] [Green Version]
- Al Janaideh, M.; Rakheja, S.; Su, C. An analytical generalized Prandtl-Ishlinskii model inversion for hysteresis compensation in micropositioning control. IEEE/ASME Trans. Mechatron. 2011, 16, 734–744. [Google Scholar] [CrossRef]
- Goldfarb, M.; Celanovic, N. Modeling piezoelectric stack actuators for control of micromanipulation. IEEE Trans. Control Syst. Technol. 1998, 17, 69–79. [Google Scholar]
- Liu, Y.; Du, D.; Qi, N.; Zhao, J. A distributed parameter maxwell-slip model for the hysteresis in piezoelectric actuators. IEEE Trans. Ind. Electron 2019, 66, 7150–7158. [Google Scholar] [CrossRef]
- Liu, D.; Fang, Y.; Wang, H. Intelligent rate-dependent hysteresis control compensator design with Bouc-Wen model based on RMSO for piezoelectric actuator. IEEE Access 2020, 8, 63993–64001. [Google Scholar] [CrossRef]
- Zhang, J.; Torres, D.; Sepulveda, N.; Tan, X. A compressive sensing-based approach for Preisach hysteresis model identification. Smart Mater. Struct 2016, 25, 075008. [Google Scholar] [CrossRef]
- Nguyen, P.; Choi, S.; Song, B. A new approach to hysteresis modelling for a piezoelectric actuator using Preisach model and recursive method with an application to open-loop position tracking control Sens. Actuators A Phys. 2018, 270, 136–152. [Google Scholar] [CrossRef]
- Yu, Z.; Jiang, X.; Cao, K.; Li, S.; Wan, Y. Hysteresis characteristics of steering mirror driven by piezoelectric actuator and its experimental research. Acta Opt. Sin. 2018, 38, 0814002. (In Chinese) [Google Scholar]
- Gu, G.; Zhu, L.; Su, C. Modeling and compensation of asymmetric hysteresis nonlinearity for piezoceramic actuators with a modified Prandtl-Ishlinskii model. IEEE Trans. Ind. Electron. 2014, 61, 1583–1595. [Google Scholar] [CrossRef]
- Qin, Y.; Zhao, X.; Zhou, L. Modeling and identification of the rate-dependent hysteresis of piezoelectric actuator using a modified Prandtl-Ishlinskii model. Micromachines 2017, 8, 114. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Wang, J.; Chen, Z.; Wang, R.; Lu, K.; Sang, Z.; Ju, B. Research on asymmetric hysteresis modeling and compensation of piezoelectric actuators with PMPI model. Micromachines 2020, 11, 357. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gan, J.; Zhang, X. Nonlinear hysteresis modeling of piezoelectric actuators using a generalized Bouc–Wen model. Micromachines 2019, 10, 183. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, W.; Han, F.; Chen, Z.; Wang, R.; Wang, C.; Lu, K.; Wang, J.; Ju, B. Modeling and compensation for asymmetrical and dynamic hysteresis of piezoelectric actuators using a dynamic delay Prandtl–Ishlinskii model. Micromachines 2021, 12, 92. [Google Scholar] [CrossRef]
- Wang, C.; Hu, L.; He, B.; Mu, Q.; Cao, Z.; Song, H.; Xuan, L. Hysteresis compensation method of piezoelectric steering mirror based on neural network. Chin. J. Lasers 2013, 40, 1113001. (In Chinese) [Google Scholar] [CrossRef]
- Liu, X.; Li, X.; Du, R. Modeling and inverse compensation control of hysteresis nonlinear characteristics of piezoelectric steering mirror. Opto-Electron. Eng. 2020, 47, 180654. (In Chinese) [Google Scholar]
- Zhao, X.L.; Tan, Y.H. Modeling hysteresis and its inverse model using neural networks based on expanded input space method. IEEE Trans. Control Syst. Technol. 2008, 16, 484–490. [Google Scholar] [CrossRef]
- Kuhnen, K. Modeling, identification and compensation of complex hysteretic nonlinearities: A modified Prandtl-Ishlinskii approach. Eur. J. Control 2003, 9, 407–418. [Google Scholar] [CrossRef]
- Zirka, S.E.; Moroz, Y.I. Hysteresis modeling based on transplantation. IEEE Trans. Magn. 1995, 31, 3509–3511. [Google Scholar] [CrossRef]
- Li, R.; Cao, K.R.; Yu, X.H.; Zeng, M. Modeling and compensation algorithms of asymmetric nonlinearity for piezoelectric actuators based on Madelung’s rules. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]
- Mayergoyz, I. Mathematical Models of Hysteresis and Their Applications; Elsevier: Amsterdam, The Netherlands, 2003. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
| 5 | |||
| 6 | |||
| 7 | |||
| 8 | |||
| 9 | |||
| 10 | |||
| 11 | |||
| 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, K.; Hao, G.; Liu, Q.; Tan, L.; Ma, J. Hysteresis Modeling and Compensation of Fast Steering Mirrors with Hysteresis Operator Based Back Propagation Neural Networks. Micromachines 2021, 12, 732. https://doi.org/10.3390/mi12070732
Cao K, Hao G, Liu Q, Tan L, Ma J. Hysteresis Modeling and Compensation of Fast Steering Mirrors with Hysteresis Operator Based Back Propagation Neural Networks. Micromachines. 2021; 12(7):732. https://doi.org/10.3390/mi12070732
Chicago/Turabian StyleCao, Kairui, Guanglu Hao, Qingfeng Liu, Liying Tan, and Jing Ma. 2021. "Hysteresis Modeling and Compensation of Fast Steering Mirrors with Hysteresis Operator Based Back Propagation Neural Networks" Micromachines 12, no. 7: 732. https://doi.org/10.3390/mi12070732
APA StyleCao, K., Hao, G., Liu, Q., Tan, L., & Ma, J. (2021). Hysteresis Modeling and Compensation of Fast Steering Mirrors with Hysteresis Operator Based Back Propagation Neural Networks. Micromachines, 12(7), 732. https://doi.org/10.3390/mi12070732