
Development of a 3-DOF Flexible Micro-Motion Platform Based on a New Compound Lever Amplification Mechanism



Abstract
1. Introduction
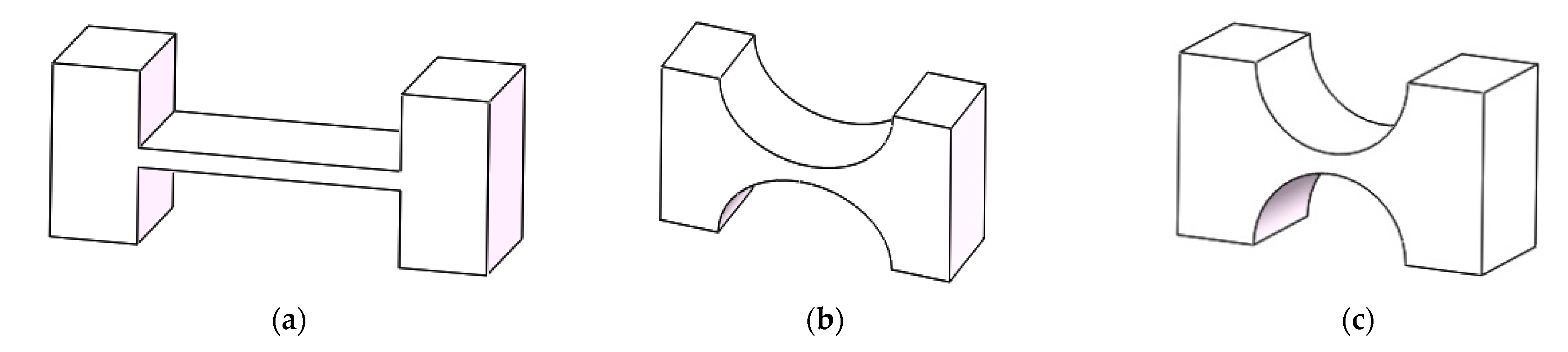
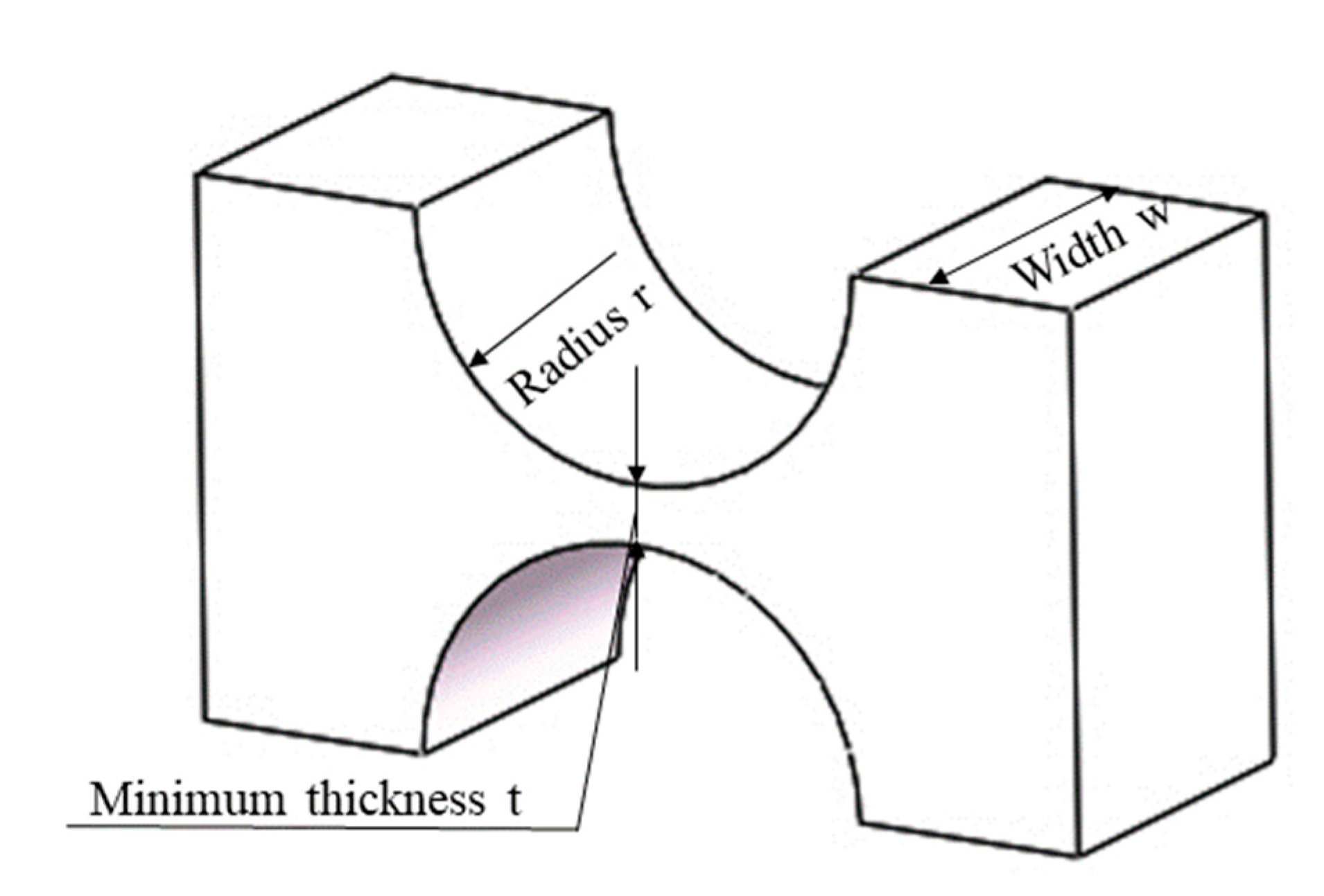
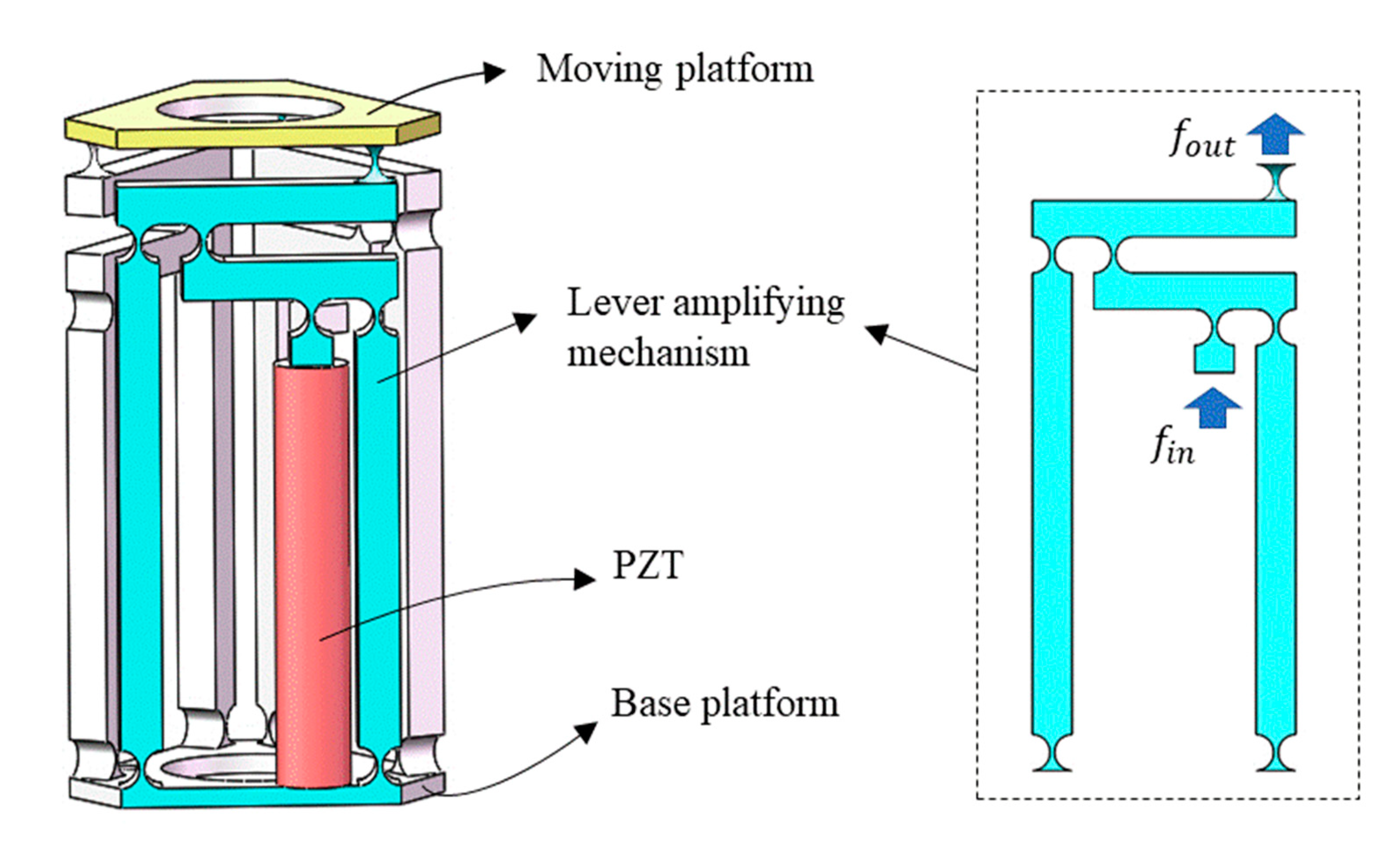
2. Mechanism Description
3. Finite Element Simulation
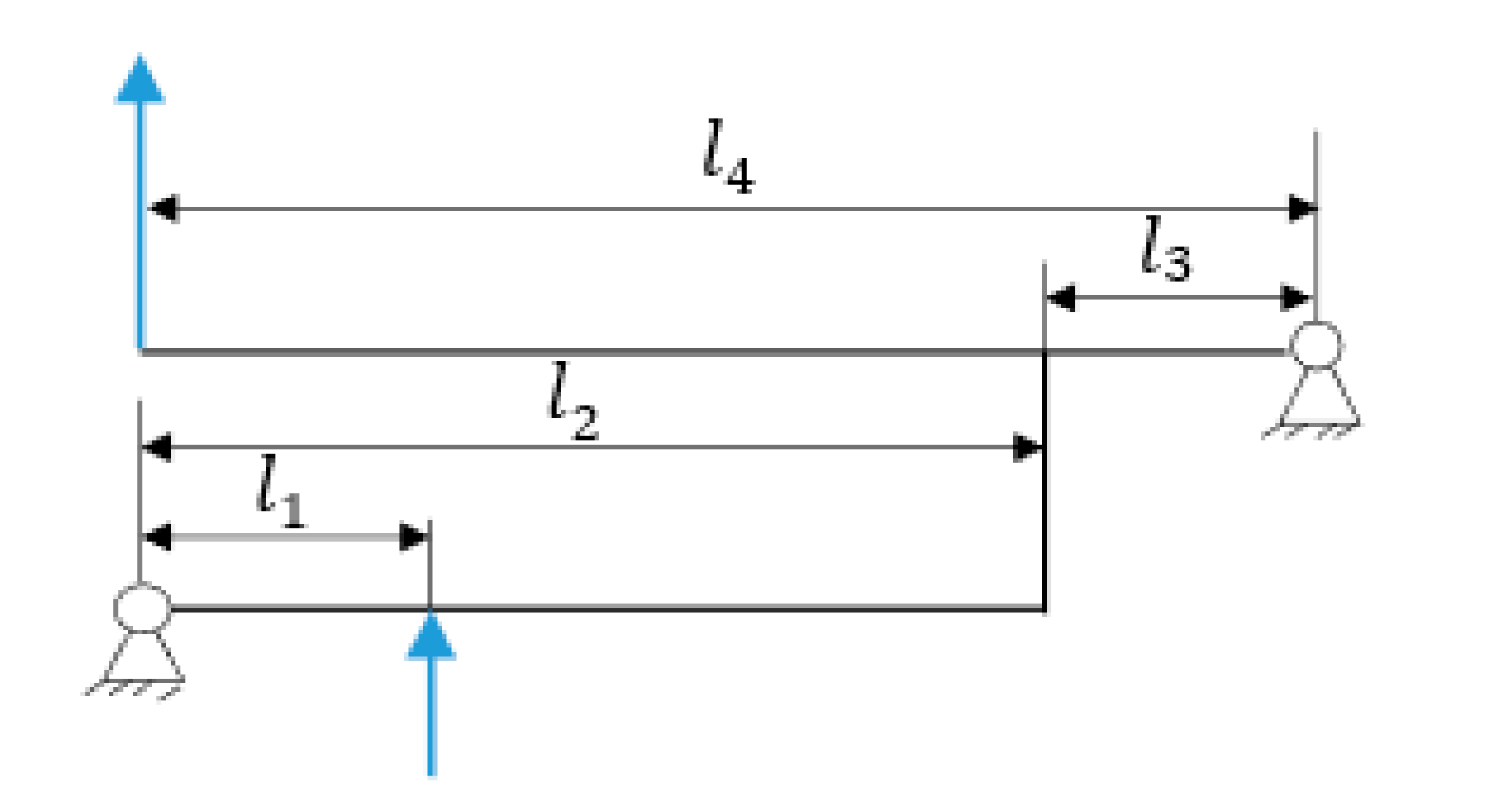
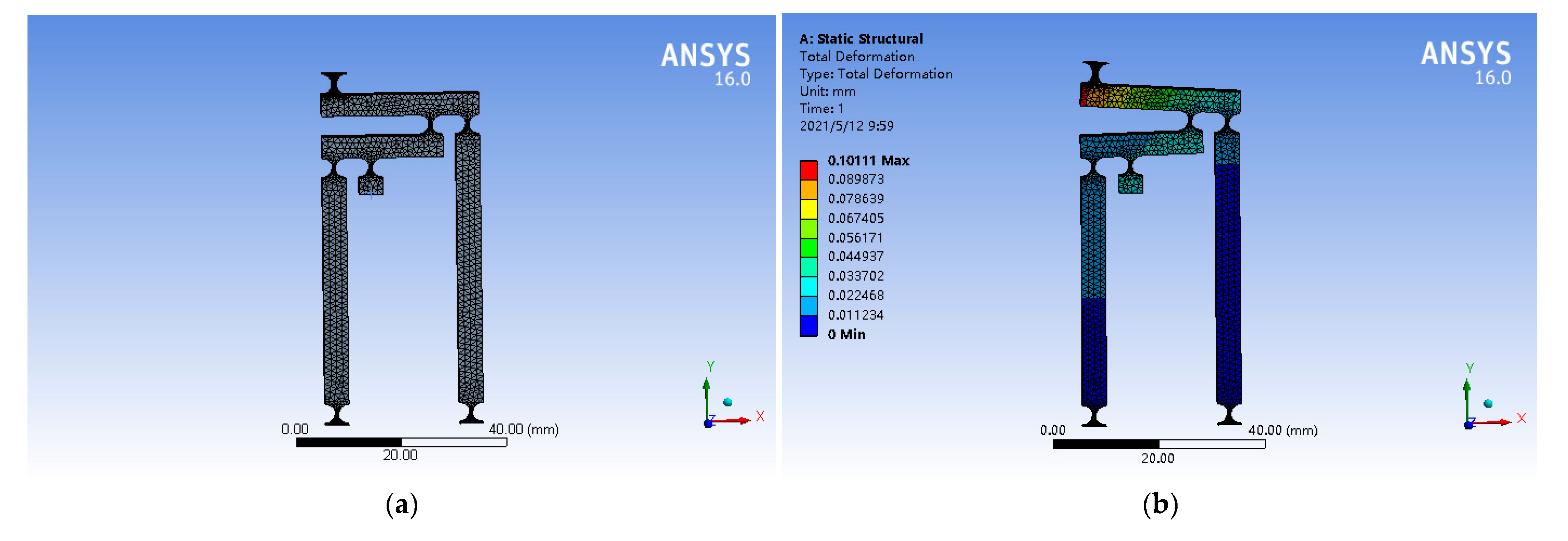
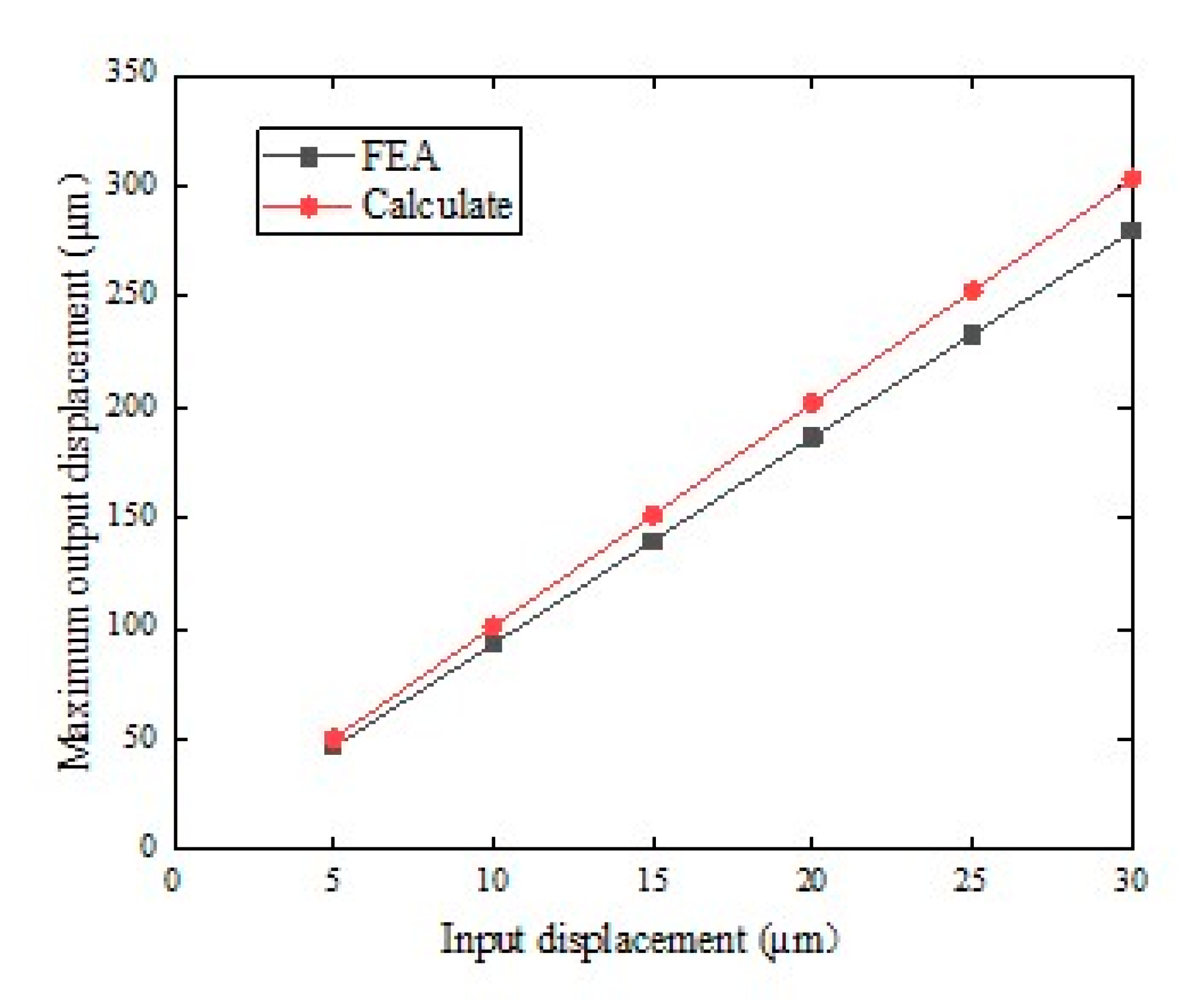
3.1. Amplification Ratio
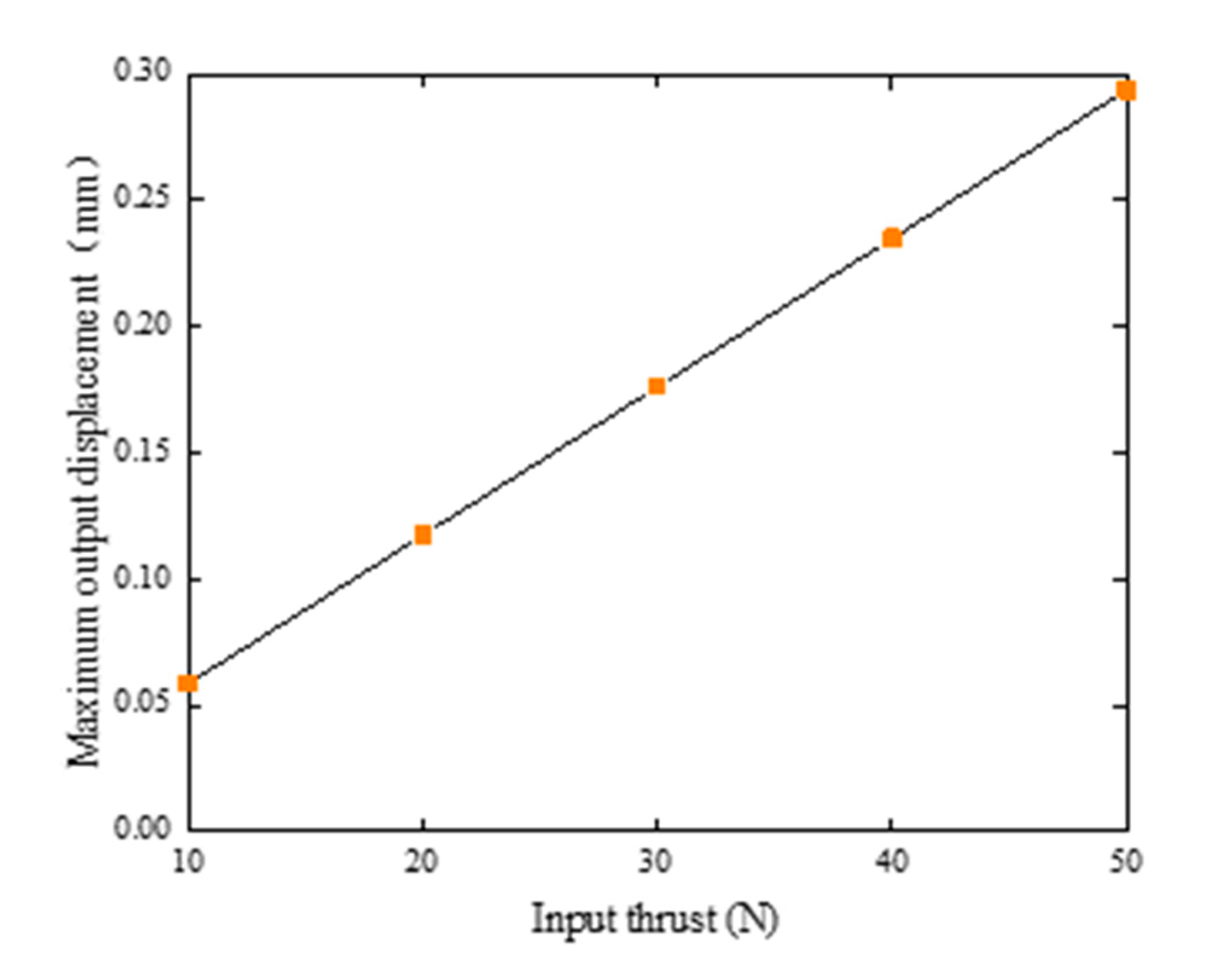
3.2. Input Stiffness
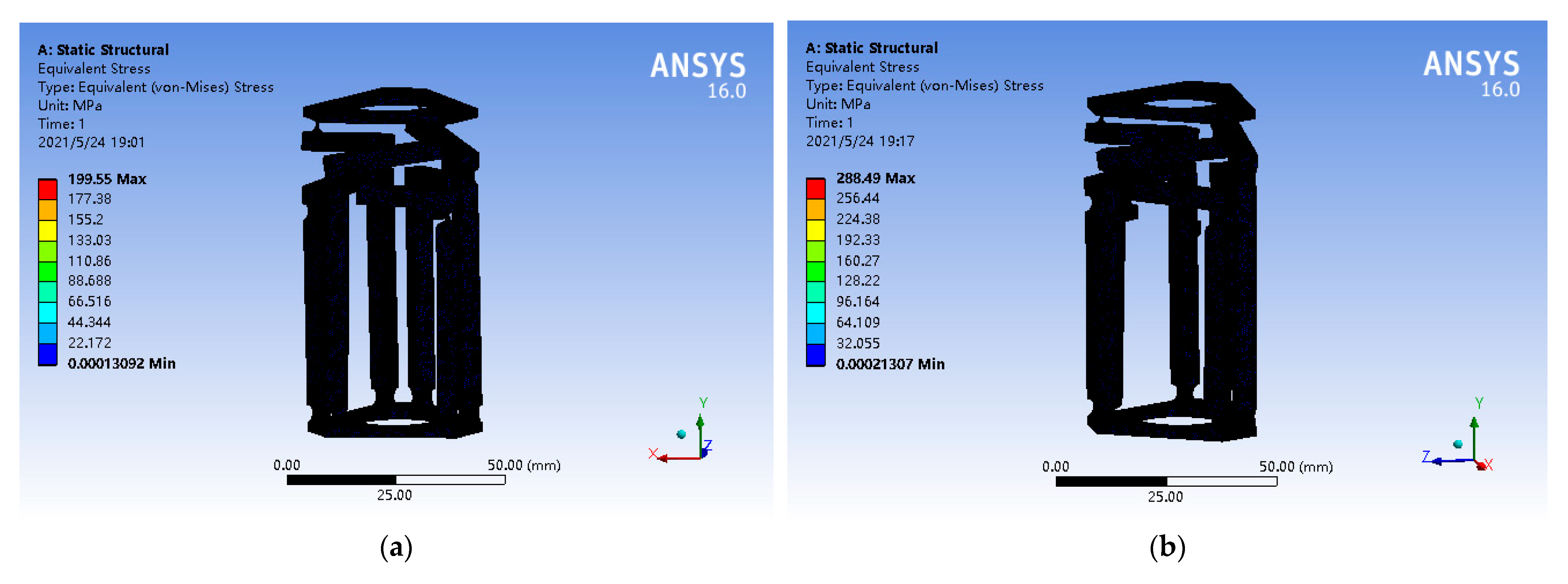
3.3. Stress Analysis
3.4. Modal Analysis
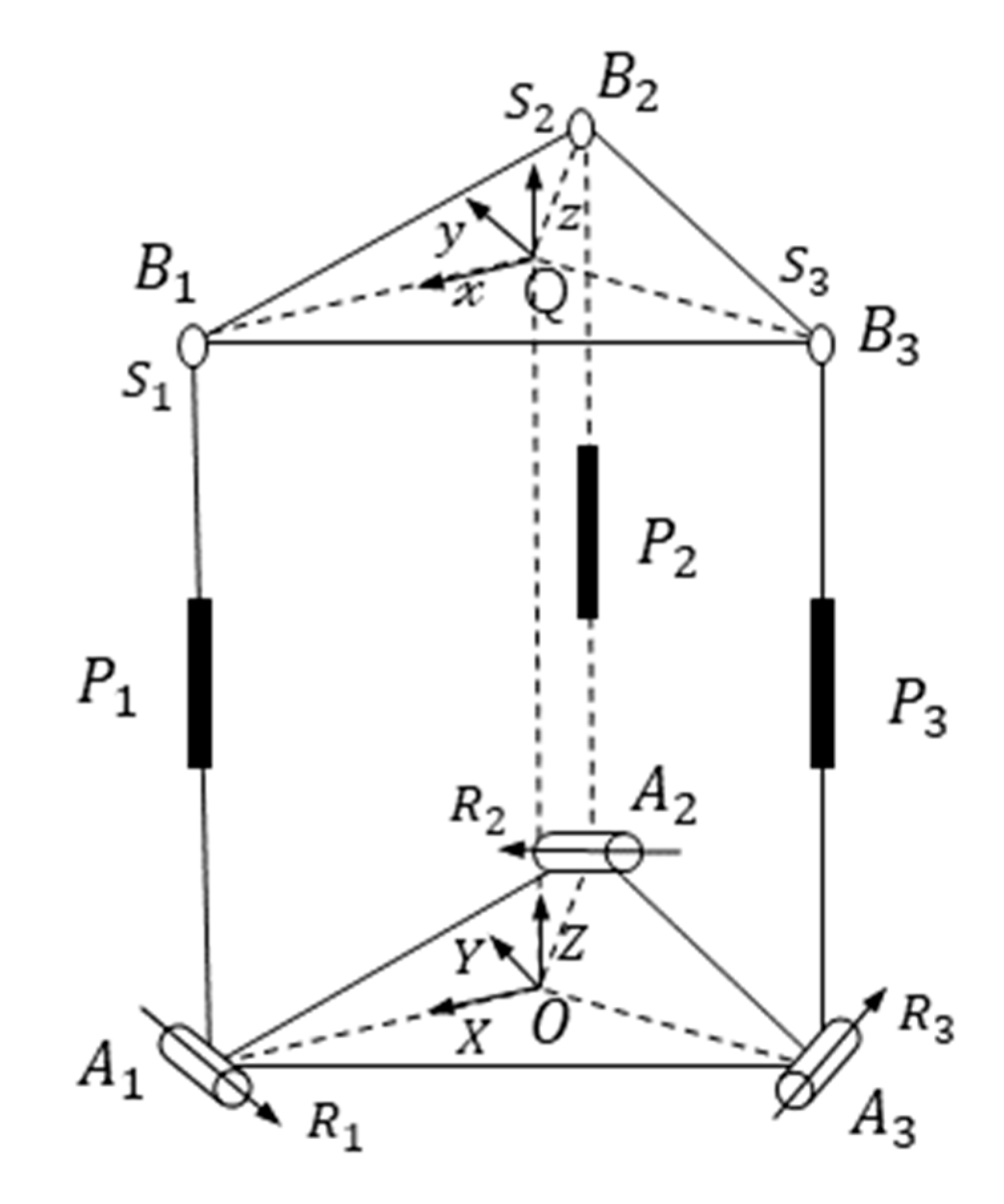
4. Kinematics Analysis
4.1. Kinematic Model
4.2. Inverse Solution of Sports Degree Posture
4.3. Sports Degree Posture Correct Solution
4.4. Jacobian Matrix
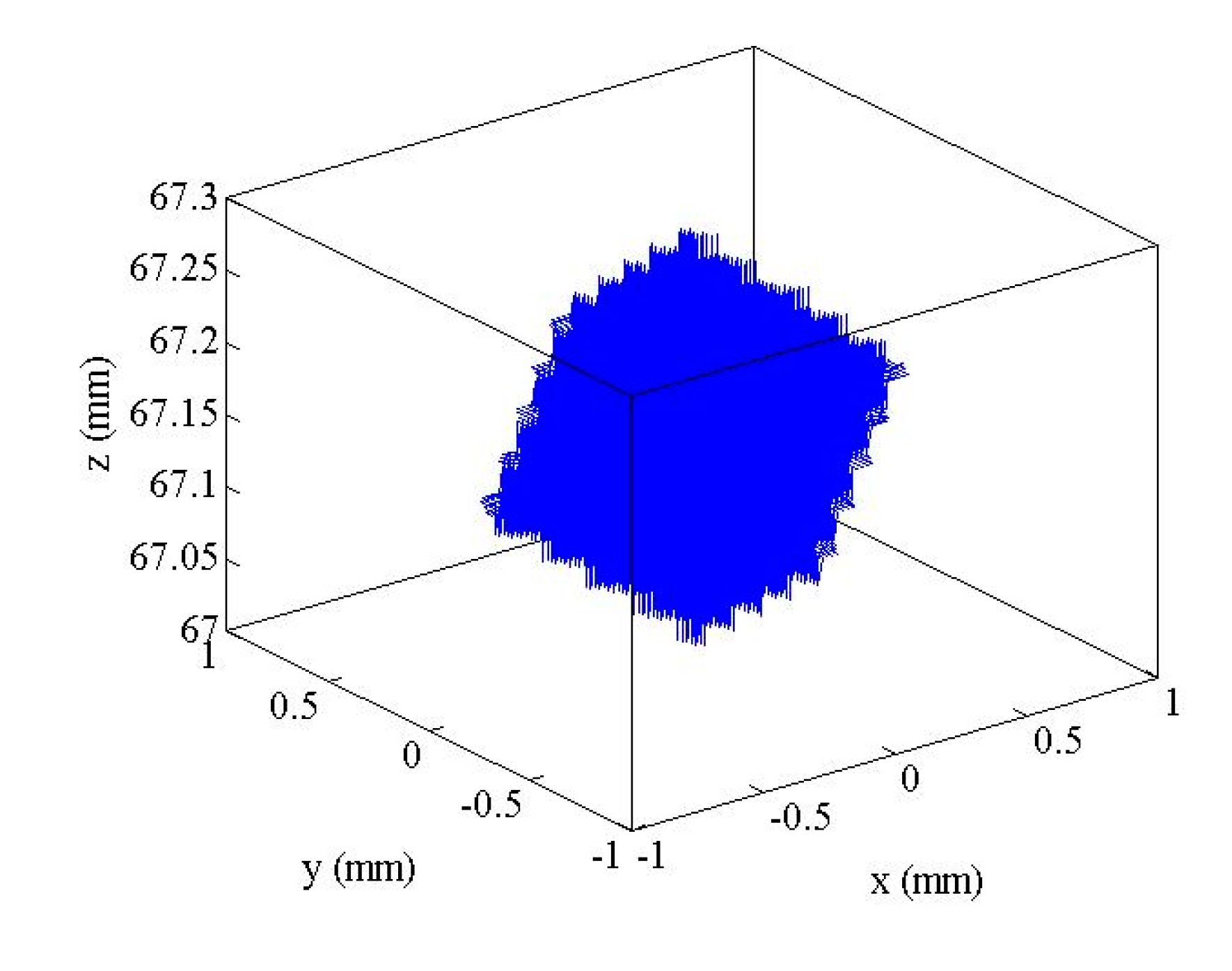
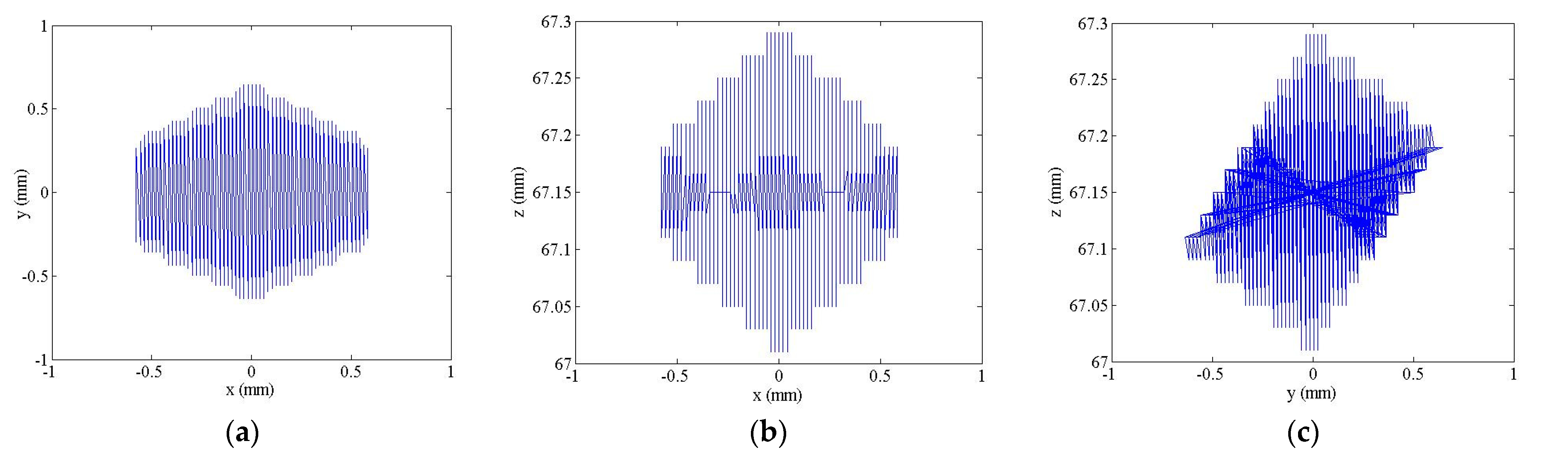
4.5. Workspace
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yong, Y.K.; Moheimani, S.O.R.; Kenton, B.J.; Leang, K.K. Invited Review Article: High-speed flexure-guided nanopositioning: Mechanical design and control issues. Rev. Sci. Instrum. 2012, 83, 121101. [Google Scholar] [CrossRef]
- Xie, Y.; Li, Y.; Cheung, C.F.; Zhu, Z.; Chen, X. Design and analysis of a novel compact XYZ parallel precision positioning stage. Microsyst. Technol. 2021, 27, 1925–1932. [Google Scholar] [CrossRef]
- Chopra, I. Review of state of art of smart structures and integrated systems. AIAA J. 2002, 40, 2145–2187. [Google Scholar] [CrossRef]
- Sente, P.A.; Labrique, F.M.; Alexandre, P.J. Efficient Control of a Piezoelectric Linear Actuator Embedded into a Servo-Valve for Aeronautic Applications. IEEE Trans. Ind. Electron. 2012, 59, 1971–1979. [Google Scholar] [CrossRef]
- Wang, S.P.; Zhang, Z.H.; Ren, L.Q.; Zhao, H.W.; Liang, Y.H.; Zhu, B. A novel in situ device based on a bionic piezoelectric actuator to study tensile and fatigue properties of bulk materials. Rev. Sci. Instrum. 2014, 85, 065103. [Google Scholar] [CrossRef]
- Liu, Y.L.; Xu, Q.S. Design of a flexure-based auto-focusing device for a microscope. Int. J. Precis. Eng. Manuf. 2015, 16, 2271–2279. [Google Scholar] [CrossRef]
- Awtar, S.; Parmar, G. Design of a Large Range XY Nanopositioning System. J. Mech. Robot. 2013, 5, 021008. [Google Scholar] [CrossRef]
- Liu, P.; Yan, P.; Zhang, Z. Design and analysis of an X–Y parallel nanopositioner supporting large-stroke servomechanism. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 364–376. [Google Scholar] [CrossRef]
- Zhao, J.; Li, Y.M.; Xu, H.Y. Design and Analysis of a novel space flexible micro manipulator platform. In Proceedings of the IEEE The World Congress on Intelligent Control and Automation, Changsha, China, 4–8 July 2018; pp. 199–204. [Google Scholar]
- Chen, X.G.; Li, Y.M. Design and analysis of a new high precision decoupled XY compact parallel micromanipulator. Micromachines 2017, 8, 82. [Google Scholar] [CrossRef]
- Ding, B.X.; Xiao, X.; Li, Y.M. Design a 3-DOF compliant parallel mechanism with large stroke. J. Tianjin Univ. Technol. 2015, 31, 28–32. [Google Scholar]
- Xu, H.Y.; Li, Y.M.; Li, X.C. Design and analysis of spatial 3-DOF full flexible micro motion platform. J. Tianjin Univ. Technol. 2018, 34, 31–36. [Google Scholar]
- Guo, Y.; Wei, L.; Wang, Y.Q.; Yang, X.F.; Yu, L. Kinematics analysis of bridge-type micro-displacement mechanism based on flexure hinge. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010. [Google Scholar] [CrossRef]
- Simic, M.; Herakovic, N. Characterisation of energy consumption of new piezo actuator system used for hydraulic on/off valves. J. Clean. Prod. 2020, 284, 124748. [Google Scholar] [CrossRef]
- Hyer, M.W.; Jilani, A.B. Deformation characteristics of circular RAINBOW actuators. Smart Mater. Struct. 2002, 11, 175–195. [Google Scholar] [CrossRef]
- Ma, H.W.; Yao, S.M.; Wang, L.Q.; Zhong, Z. Analysis of the displacement amplification ratio of bridge-type flexure hinge. Sens. Actuators A Phys. 2006, 132, 730–736. [Google Scholar] [CrossRef]
- Xu, Q.S.; Li, Y.M. Analytical modeling, optimization and testing of a compound bridge-type compliant displacement amplifier. Mech. Mach. Theory 2011, 46, 183–200. [Google Scholar] [CrossRef]
- Chen, C.M.; Hsu, Y.C.; Fung, R.F. System identification of a Scott–Russell amplifying mechanism with offset driven by a piezoelectric actuator. Appl. Math. Model. 2012, 36, 2788–2802. [Google Scholar] [CrossRef]
- Choi, S.B.; Han, S.S.; Lee, Y.S. Fine motion control of a moving stage using a piezoactuator associated with a displacement amplifier. Smart Mater. Struct. 2005, 14, 222–230. [Google Scholar] [CrossRef]
- Kang, B.H.; Wen, J.T.; Dagalakis, N.G.; Gorman, J.J. Analysis and design of parallel mechanisms with flexure joints. In Proceedings of the IEEE International Conference on Robotics and Automation, Proceedings. ICRA ‘04. 2004, New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar]
- Ouyang, P.R.; Zhang, W.J.; Gupta, M.M. A new compliant mechanical amplifier based on a symmetric five-bar topology. J. Mech. Des. 2008, 130, 104501. [Google Scholar] [CrossRef]
- Zubir, M.N.M.; Shirinzadeh, B. Development of a high precision flexure-based microgripper. Precis. Eng. J. Int. Soc. Precis. Eng. Nanotechnol. 2009, 33, 362–370. [Google Scholar] [CrossRef]
- Li, Y.M.; Xu, Q.S. Modeling and performance evaluation of a flexure-based XY parallel micromanipulator. Mech. Mach. Theory 2009, 44, 2127–2152. [Google Scholar] [CrossRef]
- Tian, Y.L.; Shirinzadeh, B.; Zhang, D.W.; Alici, G. Development and dynamic modelling of a flexure-based Scott-Russell mechanism for nano-manipulation. Mech. Syst. Signal Process. 2009, 23, 957–978. [Google Scholar] [CrossRef]
- Kao, C.C.; Fung, R.F. Using the modified PSO method to identify a Scott-Russell mechanism actuated by a piezoelectric element. Mech. Syst. Signal Process. 2009, 23, 1652–1661. [Google Scholar] [CrossRef]
- Ishii, Y.; Thummel, T.; Horie, M. Dynamic characteristic of miniature molding pantograph mechanisms for surface mount systems. Microsyst. Technol. Micro- Nanosyst. Inf. Storage Process. Syst. 2005, 11, 991–996. [Google Scholar] [CrossRef]
- Pei, X.; Yu, J.; Zong, G.; Bi, S. Design of compliant straight-line mechanisms using flexural joints. Chin. J. Mech. Eng. 2014, 27, 146–153. [Google Scholar] [CrossRef]
- Li, Y.M.; Li, X.C.; Xu, H.Y.; Ding, B.X. An investigation of the dynamic performance of a new three degree of freedom micro-operating platform. Mach. Des. Manuf. 2019, 12, 255–258. [Google Scholar]
- Polit, S.; Dong, J.Y. Development of a High-Bandwidth XY Nanopositioning Stage for High-Rate Micro-/Nanomanufacturing. IEEE-ASME Trans. Mechatron. 2011, 16, 724–733. [Google Scholar] [CrossRef]
- Qin, Y.D.; Shirinzadeh, B.; Tian, Y.L.; Zhang, D.W.; Bhagat, U. Design and Computational Optimization of a Decoupled 2-DOF Monolithic Mechanism. IEEE-ASME Trans. Mechatron. 2014, 19, 872–881. [Google Scholar] [CrossRef]
- Qu, J.L.; Chen, W.H.; Zhang, J.B.; Chen, W.J. A large-range compliant micropositioning stage with remote-center-of-motion characteristic for parallel alignment. Microsyst. Technol. Micro-Nanosyst. Inf. Storage Process. Syst. 2016, 22, 777–789. [Google Scholar] [CrossRef]
- Yu, J.J.; Bi, S.S.; Zong, G.H. Study on the Design of Fully Compliant Motion Amplification Mechanisms in Actuation Systems for Micromanipulators. Acta Aeronaut. Astronaut. Sin. 2004, 25, 74–78. [Google Scholar]
- Lin, H.R.; Cheng, C.H.; Hung, S.K. Design and quasi-static characteristics study on a planar piezoelectric nanopositioner with ultralow parasitic rotation. Mechatronics 2015, 31, 180–188. [Google Scholar] [CrossRef]
- Meng, Q. A Design Method for Flexure-Based Compliant Mechanisms on the Basis of Stiffness and Stress Characteristics. Ph.D. Thesis, University of Bologna, Bologna, Italy, 2012. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance | Resolution Ratio | Displacement of 0 ~ 100 V | Thrust | Static Stiffness | Idling Frequency | Length | Capacitor |
|---|---|---|---|---|---|---|---|
| value | 0.3 nm | 0 ~ 30 μm | 0 ~ 50 N | 7 N/μm | 15 kHz | 44 mm | 0.7 μF |
| Parameter | Value (mm) | Parameter | Value (mm) |
|---|---|---|---|
| l1 | 7 | r | 2 |
| l2 | 18.5 | t | 0.5 |
| l3 | 7 | w | 4 |
| l4 | 25.5 |
| Parameter | Value | Unit |
|---|---|---|
| Young’s modulus | 71.7 | GPa |
| Tensile yield strength | 503 | MPa |
| Poisson’s ratio | 0.33 | — |
| Density | 2810 | kg/m3 |
| Mode | Frequency (Hz) | Mode | Frequency (Hz) |
|---|---|---|---|
| 1. | 273.7 | 4. | 504.13 |
| 2. | 273.86 | 5. | 609.59 |
| 3. | 321.97 | 6. | 610.57 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, F.; Li, Y.; Qian, J. Development of a 3-DOF Flexible Micro-Motion Platform Based on a New Compound Lever Amplification Mechanism. Micromachines 2021, 12, 686. https://doi.org/10.3390/mi12060686
Cui F, Li Y, Qian J. Development of a 3-DOF Flexible Micro-Motion Platform Based on a New Compound Lever Amplification Mechanism. Micromachines. 2021; 12(6):686. https://doi.org/10.3390/mi12060686
Chicago/Turabian StyleCui, Fangni, Yangmin Li, and Junnan Qian. 2021. "Development of a 3-DOF Flexible Micro-Motion Platform Based on a New Compound Lever Amplification Mechanism" Micromachines 12, no. 6: 686. https://doi.org/10.3390/mi12060686
APA StyleCui, F., Li, Y., & Qian, J. (2021). Development of a 3-DOF Flexible Micro-Motion Platform Based on a New Compound Lever Amplification Mechanism. Micromachines, 12(6), 686. https://doi.org/10.3390/mi12060686