
Nonlinear Stabilization Controller for the Boost Converter with a Constant Power Load in Both Continuous and Discontinuous Conduction Modes

 , ,
, ,  and
and 
Abstract
1. Introduction
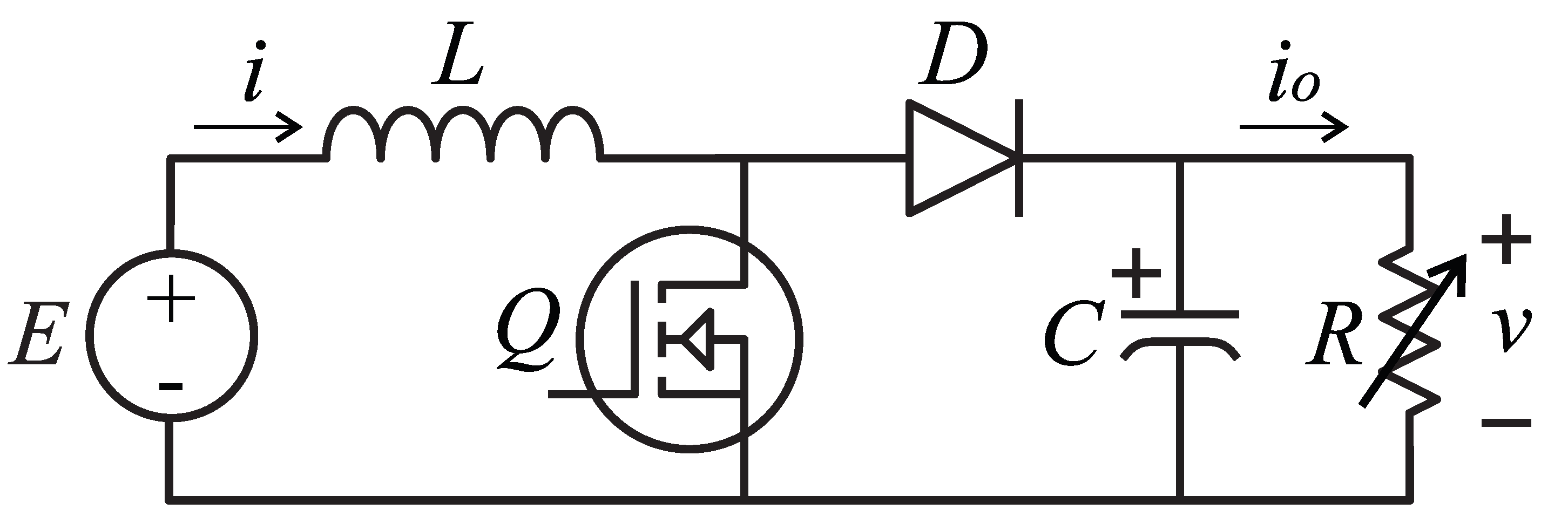
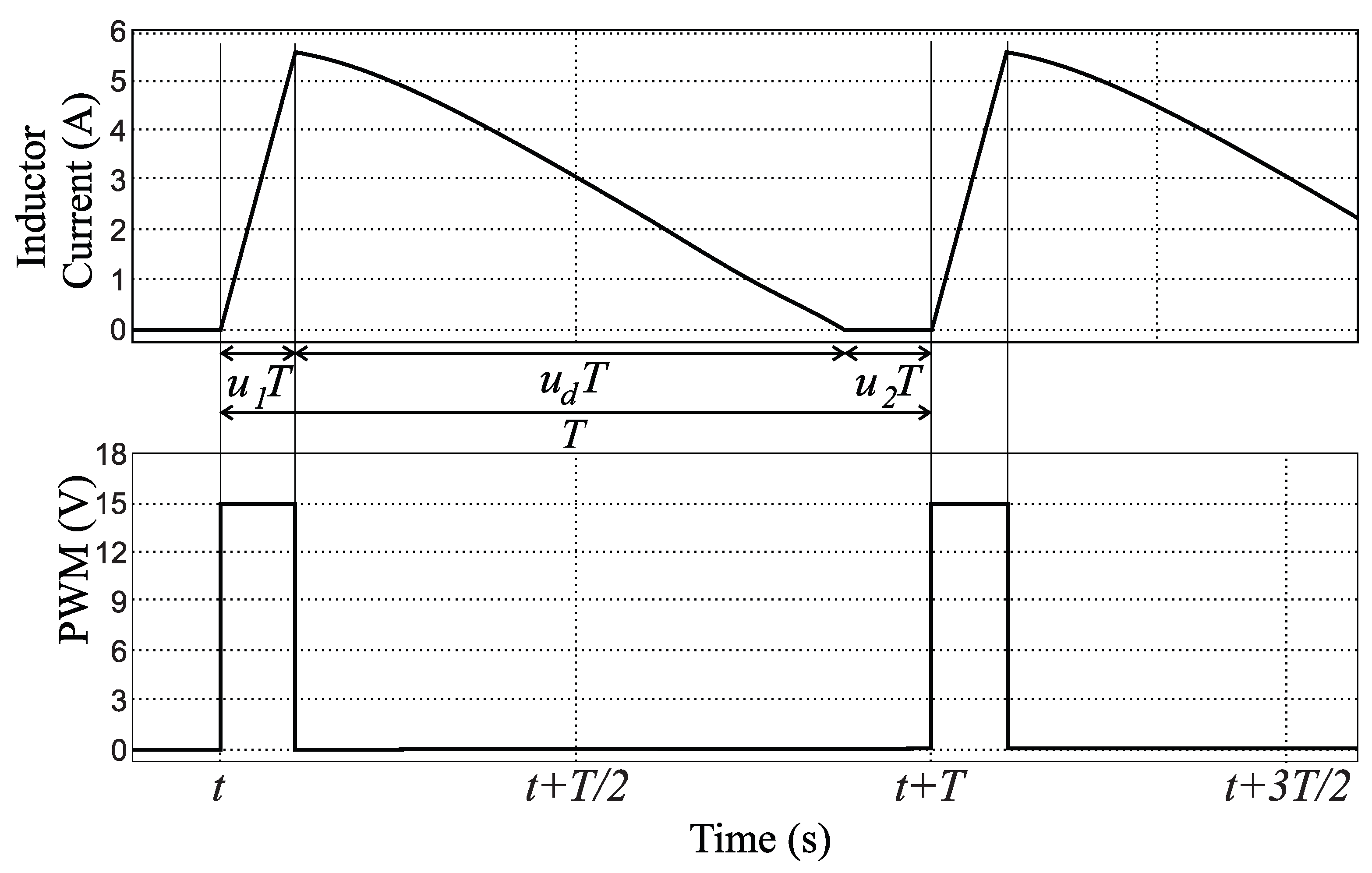
2. CMI Model of the Boost Converter
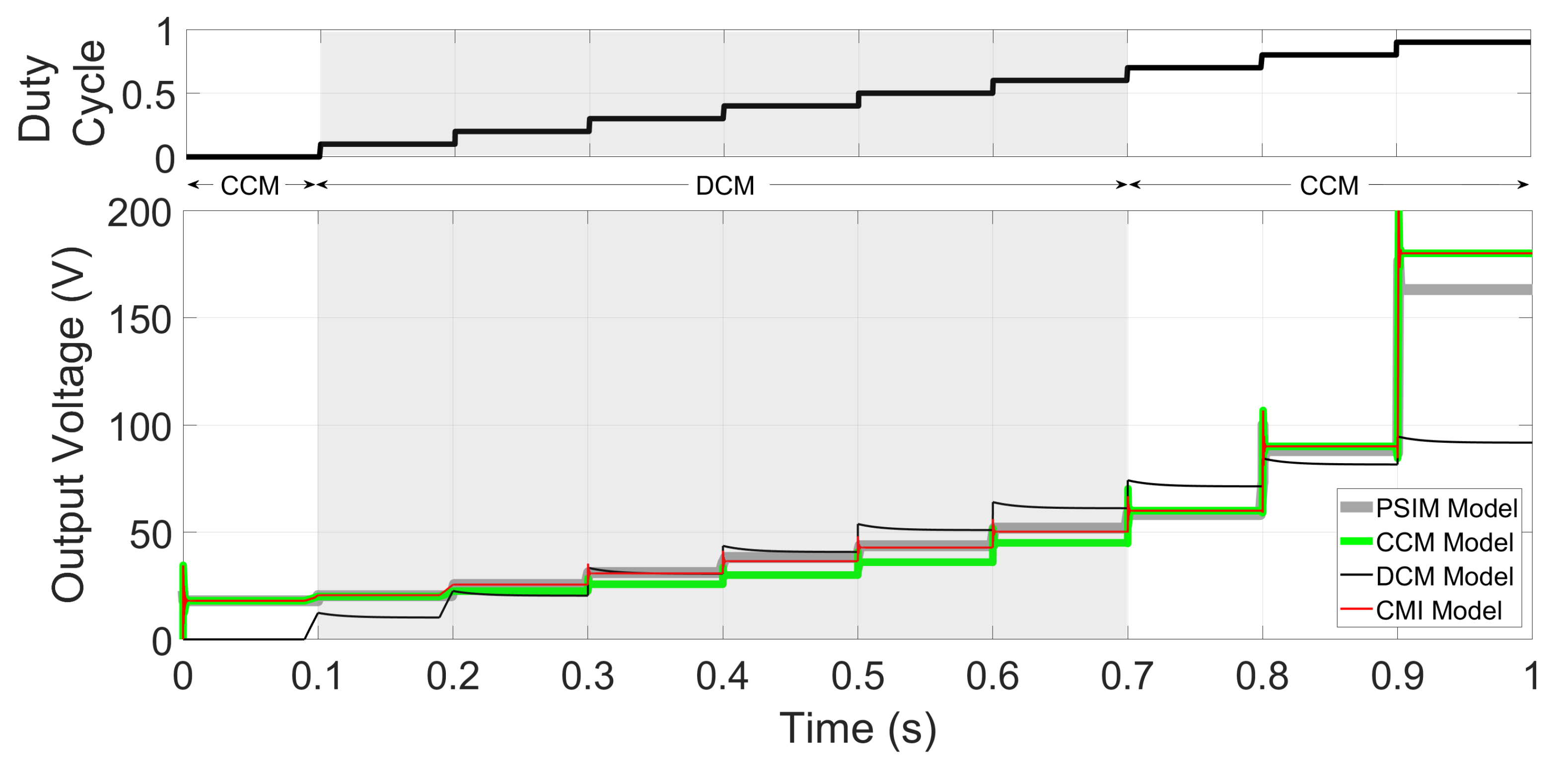
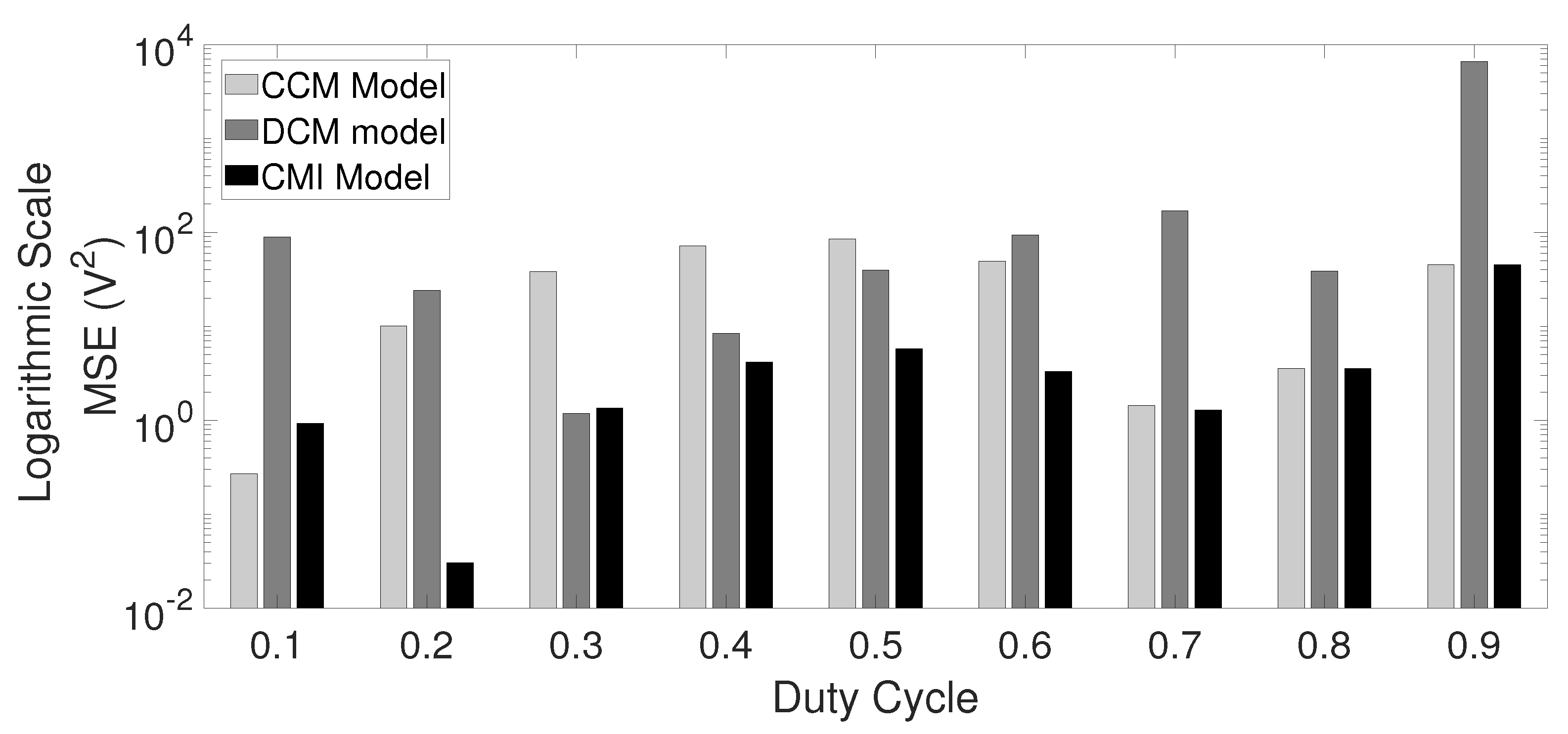
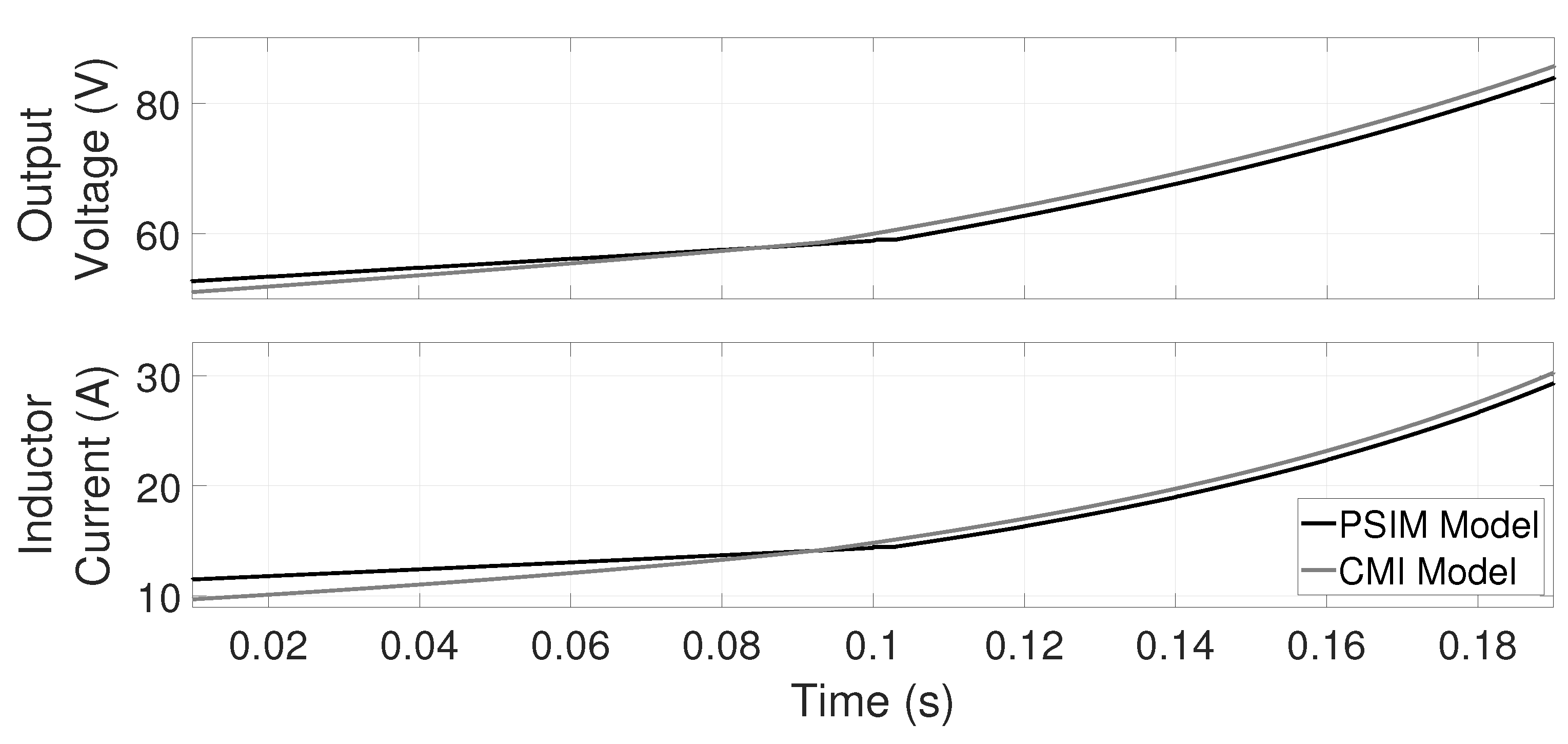
3. Validation of the CMI Model for the Boost Converter
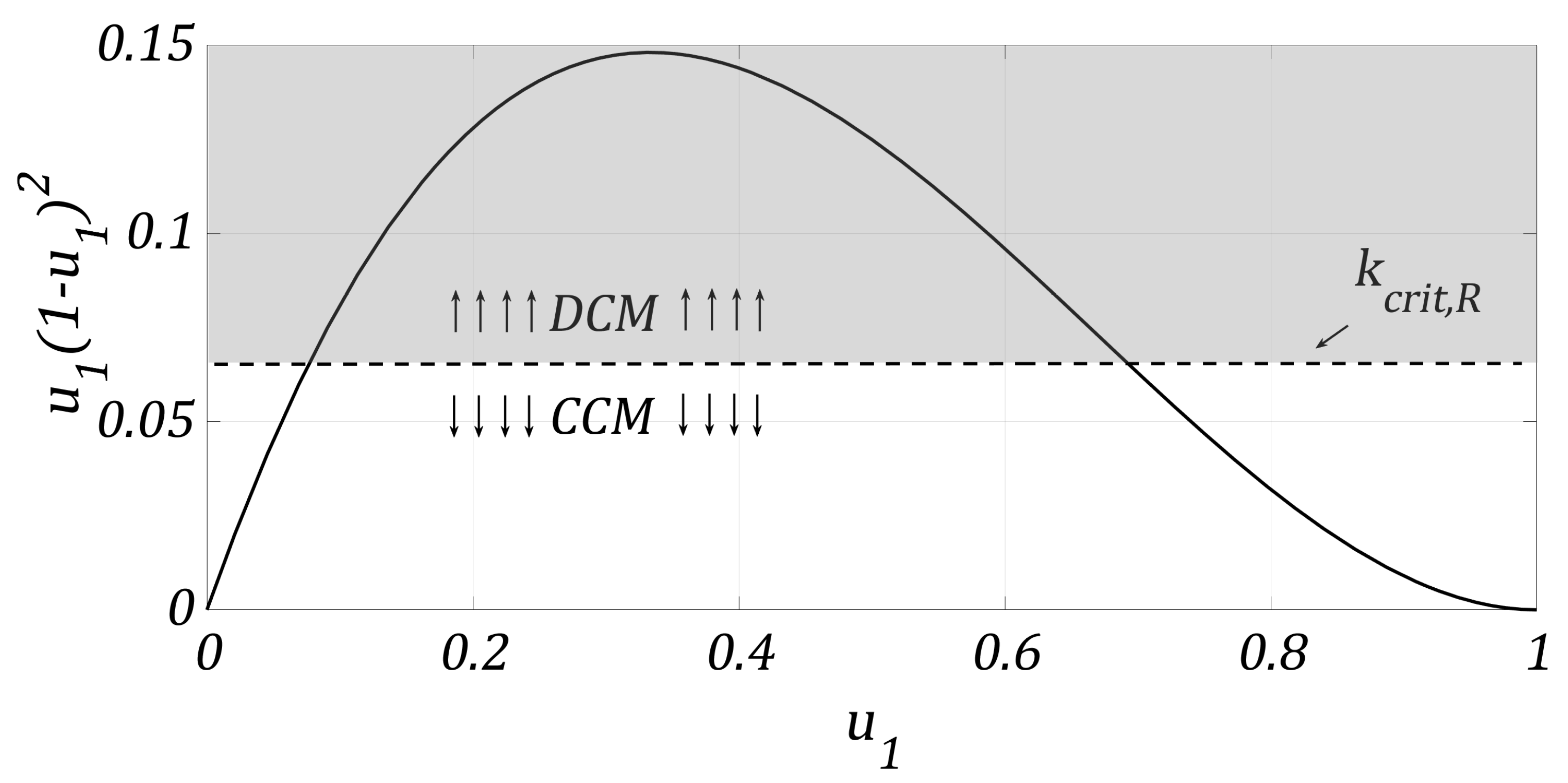
4. Open-Loop Instability of the Boost Converter Dynamics with a CPL
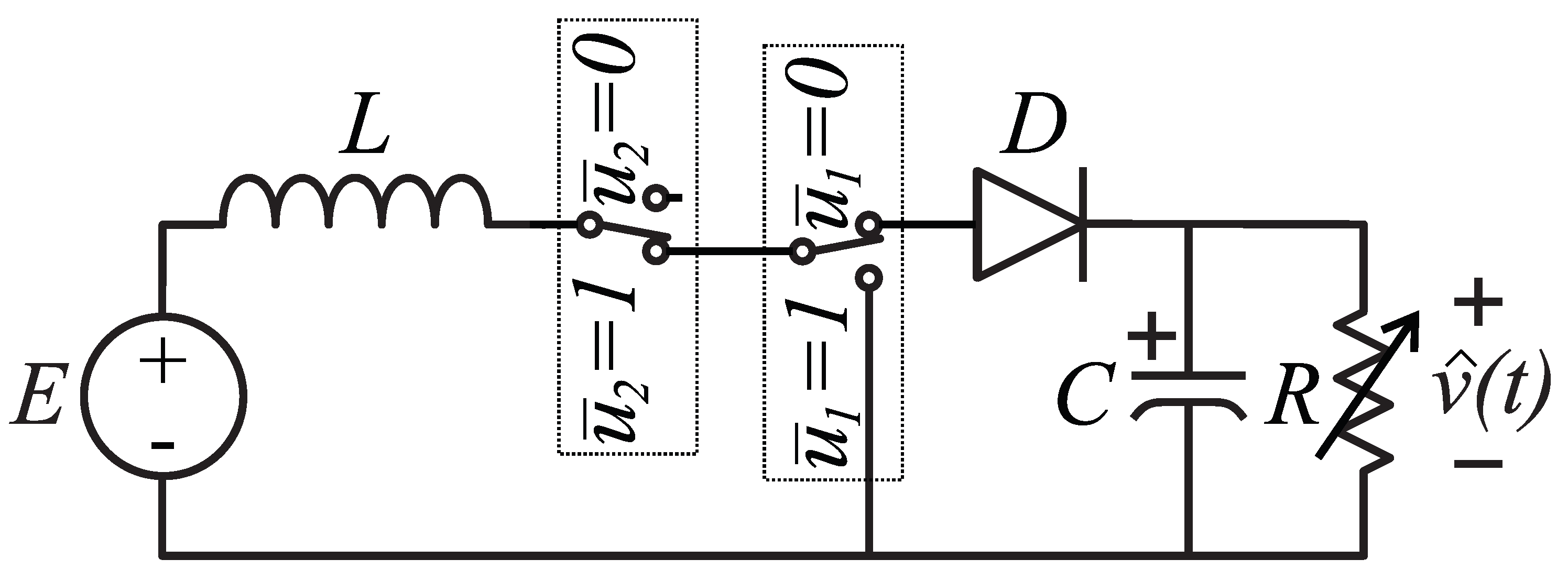
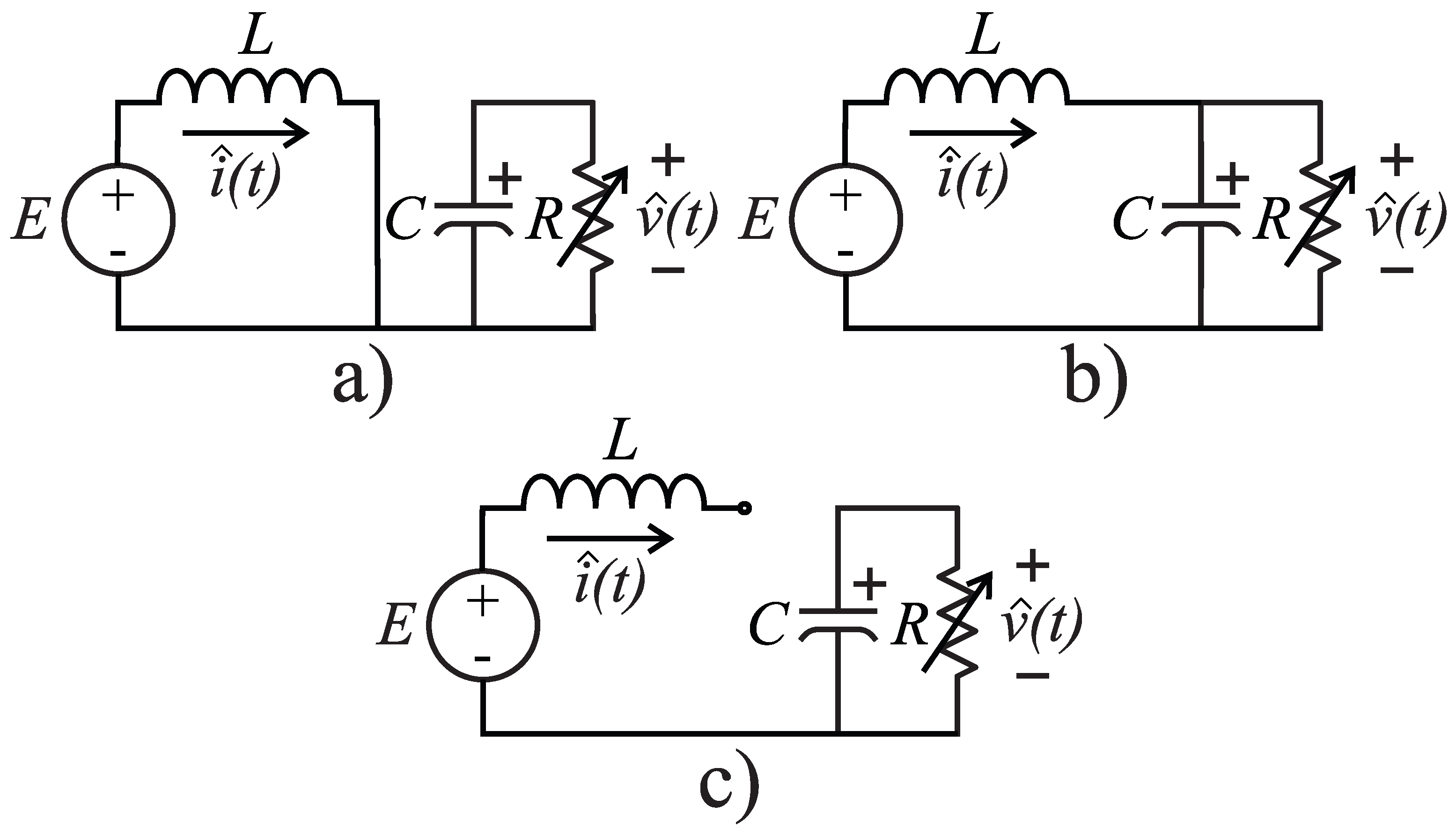
5. Nonlinear Stabilization Controller for the Boost Converter with a CPL for CMI Operation
6. Closed-Loop Numerical and Experimental Validations
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Proof of Proposition 1
Appendix A.2. Proof of Theorem 1
References
- Sira-Ramirez, H.J.; Silva-Ortigoza, R. Control Design Techniques in Power Electronics Devices; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Khaligh, A.; Nie, Z.; Lee, Y.J.; Emadi, A. Integrated Power Electronic Converters and Digital Control; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Mazda, F.F. Power Electronics Handbook: Components, Circuits and Applications; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Sum, K.K. Switch Mode Power Conversion: Basic Theory and Design; Routledge: London, UK, 2017. [Google Scholar]
- Luo, F.L.; Ye, H. Power Electronics: Advanced Conversion Technologies; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Ayachit, A.; Kazimierczuk, M.K. Averaged small-signal model of PWM DC-DC converters in CCM including switching power loss. IEEE Trans. Circuits Syst. 2018, 66, 262–266. [Google Scholar] [CrossRef]
- Man, T.Y.; Mok, P.K.; Chan, M.J. A 0.9-V input discontinuous-conduction-mode boost converter with CMOS-control rectifier. IEEE J. Solid-State Circuits 2008, 43, 2036–2046. [Google Scholar] [CrossRef]
- Liu, K.H.; Lin, Y.L. Current waveform distortion in power factor correction circuits employing discontinuous-mode boost converters. In Proceedings of the 20th Annual IEEE Power Electronics Specialists Conference, Milwaukee, MI, USA, 26–29 June 1989; pp. 825–829. [Google Scholar]
- Kolar, J.W.; Ertl, H.; Zach, F.C. Space vector-based analytical analysis of the input current distortion of a three-phase discontinuous-mode boost rectifier system. IEEE Trans. Power Electron. 1995, 10, 733–745. [Google Scholar] [CrossRef]
- Lazar, J.; Cuk, S. Open loop control of a unity power factor, discontinuous conduction mode boost rectifier. In Proceedings of the 17th International Telecommunications Energy Conference, The Hague, The Netherlands, 29 October–1 November 1995; pp. 671–677. [Google Scholar]
- Chan, C.; Pong, M. Input current analysis of interleaved boost converters operating in discontinuous-inductor-curent mode. In Proceedings of the 28th Annual IEEE Power Electronics Specialists Conference. Formerly Power Conditioning Specialists Conference 1970. Power Processing and Electronic Specialists Conference 1972, St. Louis, MO, USA, 27 June 1997; pp. 392–398. [Google Scholar]
- Kolar, J.W.; Ertl, H.; Zach, F.C. A comprehensive design approach for a three-phase high-frequency single-switch discontinuous-mode boost power factor corrector based on analytically derived normalized converter component ratings. IEEE Trans. Ind. Appl. 1995, 31, 569–582. [Google Scholar] [CrossRef]
- Ye, Z.Z.; Jovanovic, M.M. Implementation and performance evaluation of DSP-based control for constant-frequency discontinuous-conduction-mode boost PFC front end. IEEE Trans. Ind. Electron. 2005, 52, 98–107. [Google Scholar] [CrossRef]
- Reatti, A.; Kazimierczuk, M.K. Small-signal model of PWM converters for discontinuous conduction mode and its application for boost converter. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 2003, 50, 65–73. [Google Scholar] [CrossRef]
- Lo, Y.K.; Lin, J.Y.; Ou, S.Y. Switching-frequency control for regulated discontinuous-conduction-mode boost rectifiers. IEEE Trans. Ind. Electron. 2007, 54, 760–768. [Google Scholar] [CrossRef]
- Tsai, F.S. Small-signal and transient analysis of a zero-voltage-switched, phase-controlled PWM converter using averaged switch model. IEEE Trans. Ind. Appl. 1993, 29, 493–499. [Google Scholar] [CrossRef]
- Tse, C.; Adams, K. Qualitative analysis and control of a DC-to-DC boost converter operating in discontinuous mode. IEEE Trans. Power Electron. 1990, 5, 323–330. [Google Scholar] [CrossRef]
- Ferdowsi, M.; Emadi, A. Estimative current mode control technique for DC-DC converters operating in discontinuous conduction mode. IEEE Power Electron. Lett. 2004, 2, 20–23. [Google Scholar] [CrossRef]
- Salimi, M.; Soltani, J.; Markadeh, G.A.; Abjadi, N.R. Indirect output voltage regulation of DC–DC buck/boost converter operating in continuous and discontinuous conduction modes using adaptive backstepping approach. IET Power Electron. 2013, 6, 732–741. [Google Scholar] [CrossRef]
- Parui, S.; Banerjee, S. Bifurcations due to transition from continuous conduction mode to discontinuous conduction mode in the boost converter. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 2003, 50, 1464–1469. [Google Scholar] [CrossRef]
- Hai-Peng, R.; Ding, L. Bifurcation behaviours of peak current controlled PFC boost converter. Chin. Phys. 2005, 14, 1352. [Google Scholar] [CrossRef]
- Ying, Z.B.Q. The Precise Discrete Mapping of Voltage-Fed DCM Boost Converter and Its Bifurcation and Chaos. Trans. China Electrotech. Soc. 2002, 3, 43–47. [Google Scholar]
- Lai, J.S.; Chen, D. Design consideration for power factor correction boost converter operating at the boundary of continuous conduction mode and discontinuous conduction mode. In Proceedings of the Eighth Annual Applied Power Electronics Conference and Exposition, San Diego, CA, USA, 7–11 March 1993; pp. 267–273. [Google Scholar]
- De Gusseme, K.; Van de Sype, D.M.; Van den Bossche, A.P.; Melkebeek, J.A. Digitally controlled boost power-factor-correction converters operating in both continuous and discontinuous conduction mode. IEEE Trans. Ind. Electron. 2005, 52, 88–97. [Google Scholar] [CrossRef]
- Kancherla, S.; Tripathi, R. Nonlinear average current mode control for a DC-DC buck converter in continuous and discontinuous conduction modes. In Proceedings of the 2008 IEEE Region 10 Conference, Hyderabad, India, 19–21 November 2008; pp. 1–6. [Google Scholar]
- Benadero, L.; El Aroudi, A.; Martínez-Salamero, L.; Tse, C.K. Period Doubling Route to Chaos in Open Loop Boost Converters under Constant Power Loading and Discontinuous Conduction Mode Conditions. In Proceedings of the 2020 IEEE International Symposium on Circuits and Systems (ISCAS), Seville, Spain, 12–21 October 2020; pp. 1–5. [Google Scholar]
- Zheng, C.; Dragičević, T.; Zhang, J.; Chen, R.; Blaabjerg, F. Composite Robust Quasi-Sliding Mode Control of DC-DC Buck Converter With Constant Power Loads. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 1455–1464. [Google Scholar] [CrossRef]
- Martinez-Trevino, B.A.; El Aroudi, A.; Valderrama-Blavi, H.; Cid-Pastor, A.; Vidal-Idiarte, E.; Martinez-Salamero, L. PWM Nonlinear Control with Load Power Estimation for Output Voltage Regulation of a Boost Converter with Constant Power Load. IEEE Trans. Power Electron. 2020, 36, 2143–2153. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Farsizadeh, H.; Tavana, M.R.; Khooban, M.H. A Novel Deep Learning Controller for DC/DC Buck-Boost Converters in Wireless Power Transfer Feeding CPLs. IEEE Trans. Ind. Electron. 2020, 68, 6379–6384. [Google Scholar] [CrossRef]
- Hassan, M.A.; He, Y. Constant Power Load Stabilization in DC Microgrid Systems Using Passivity-Based Control With Nonlinear Disturbance Observer. IEEE Access 2020, 8, 92393–92406. [Google Scholar] [CrossRef]
- Tang, G.; Zhang, T.; Zhang, X. An Active Stabilization Control Strategy for DC-DC Converter Feeding Constant Power Load in Electric Vehicle. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; pp. 375–379. [Google Scholar]
- Li, X.; Zhang, X.; Jiang, W.; Wang, J.; Wang, P.; Wu, X. A Novel Assorted Nonlinear Stabilizer for DC-DC Multilevel Boost Converter with Constant Power Load in DC Microgrid. IEEE Trans. Power Electron. 2020, 35, 11181–11192. [Google Scholar] [CrossRef]
- Martinez-Treviño, B.A.; El Aroudi, A.; Cid-Pastor, A.; Martinez-Salamero, L. Nonlinear control for output voltage regulation of a boost converter with a constant power load. IEEE Trans. Power Electron. 2019, 34, 10381–10385. [Google Scholar] [CrossRef]
- Rahimi, A.M.; Emadi, A. Discontinuous-conduction mode DC/DC converters feeding constant-power loads. IEEE Trans. Ind. Electron. 2009, 57, 1318–1329. [Google Scholar] [CrossRef]
- Li, Y.; Vannorsdel, K.R.; Zirger, A.J.; Norris, M.; Maksimovic, D. Current mode control for boost converters with constant power loads. IEEE Trans. Circuits Syst. Regul. Pap. 2011, 59, 198–206. [Google Scholar] [CrossRef]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Neumann, K.; Steil, J.J. Learning robot motions with stable dynamical systems under diffeomorphic transformations. Robot. Auton. Syst. 2015, 70, 1–15. [Google Scholar] [CrossRef]
- Moulay, E.; Bourdais, R.; Perruquetti, W. Stabilization of nonlinear switched systems using control lyapunov functions. Nonlinear Anal. Hybrid Syst. 2007, 1, 482–490. [Google Scholar] [CrossRef]
- Zhao, X.; Kao, Y.; Niu, B.; Wu, T. Control Synthesis of Switched Systems; Springer: New York, NY, USA, 2017. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Boost | Model type | CPL | Controller |
|---|---|---|---|---|
| [1,2,5] | ✓ | CCM | ✓ | |
| [3,4] | ✓ | Static | ||
| [6] | ✓ | CCM w/loss | ||
| [7,8,9,11,12,13,18] | ✓ | Static | ✓ | |
| [19] | CMI (implicit) | ✓ | ||
| [14] | ✓ | DCM w/loss | ||
| [15] | ✓ | CRM | ✓ | |
| [16] | DCM/CCM | |||
| [17] | ✓ | DCM | ✓ | |
| [20,22] | ✓ | DCM/CCM | ||
| [21] | ✓ | DCM/CCM | ✓ | |
| [23] | ✓ | Static | ||
| [24] | ✓ | Static | ✓ | |
| [25] | Static | ✓ | ||
| [26] | ✓ | DCM | ✓ | |
| [27] | CCM | ✓ | ✓ | |
| [28] | ✓ | CCM | ✓ | ✓ |
| [29] | CCM | ✓ | ✓ | |
| [30] | CCM | ✓ | ✓ | |
| [33] | ✓ | CCM | ✓ | ✓ |
| [34] | ✓ | DCM | ✓ | ✓ |
| [35] | ✓ | CCM | ✓ | ✓ |
| This proposal | ✓ | CMI | ✓ | ✓ |
| Mode | Equations | ||
|---|---|---|---|
| X | 0 | Holding | ; |
| 0 | 1 | Discharging | ; |
| 1 | 1 | Charging | ; |
| CPL Power-Level (W) | Efficiency (%) | Conduction Mode |
|---|---|---|
| 20 | DCM | |
| 40 | DCM | |
| 100 | CCM | |
| 135 | CCM |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parada Salado, J.G.; Herrera Ramírez, C.A.; Soriano Sánchez, A.G.; Rodríguez Licea, M.A. Nonlinear Stabilization Controller for the Boost Converter with a Constant Power Load in Both Continuous and Discontinuous Conduction Modes. Micromachines 2021, 12, 522. https://doi.org/10.3390/mi12050522
Parada Salado JG, Herrera Ramírez CA, Soriano Sánchez AG, Rodríguez Licea MA. Nonlinear Stabilization Controller for the Boost Converter with a Constant Power Load in Both Continuous and Discontinuous Conduction Modes. Micromachines. 2021; 12(5):522. https://doi.org/10.3390/mi12050522
Chicago/Turabian StyleParada Salado, Juan Gerardo, Carlos Alonso Herrera Ramírez, Allan Giovanni Soriano Sánchez, and Martín Antonio Rodríguez Licea. 2021. "Nonlinear Stabilization Controller for the Boost Converter with a Constant Power Load in Both Continuous and Discontinuous Conduction Modes" Micromachines 12, no. 5: 522. https://doi.org/10.3390/mi12050522
APA StyleParada Salado, J. G., Herrera Ramírez, C. A., Soriano Sánchez, A. G., & Rodríguez Licea, M. A. (2021). Nonlinear Stabilization Controller for the Boost Converter with a Constant Power Load in Both Continuous and Discontinuous Conduction Modes. Micromachines, 12(5), 522. https://doi.org/10.3390/mi12050522