
Investigation on GaN HEMTs Based Three-Phase STATCOM with Hybrid Control Scheme


Abstract
:1. Introduction
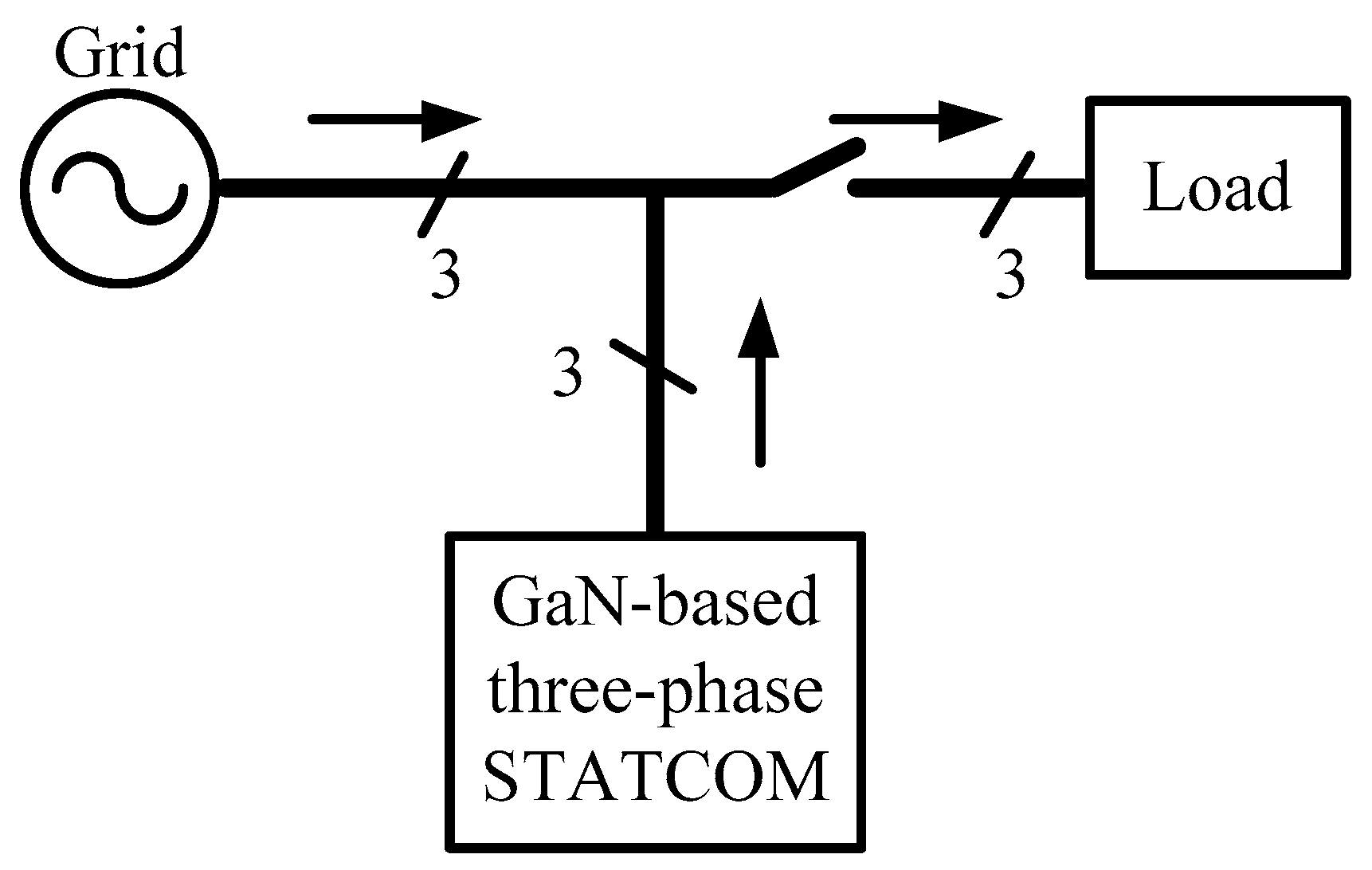
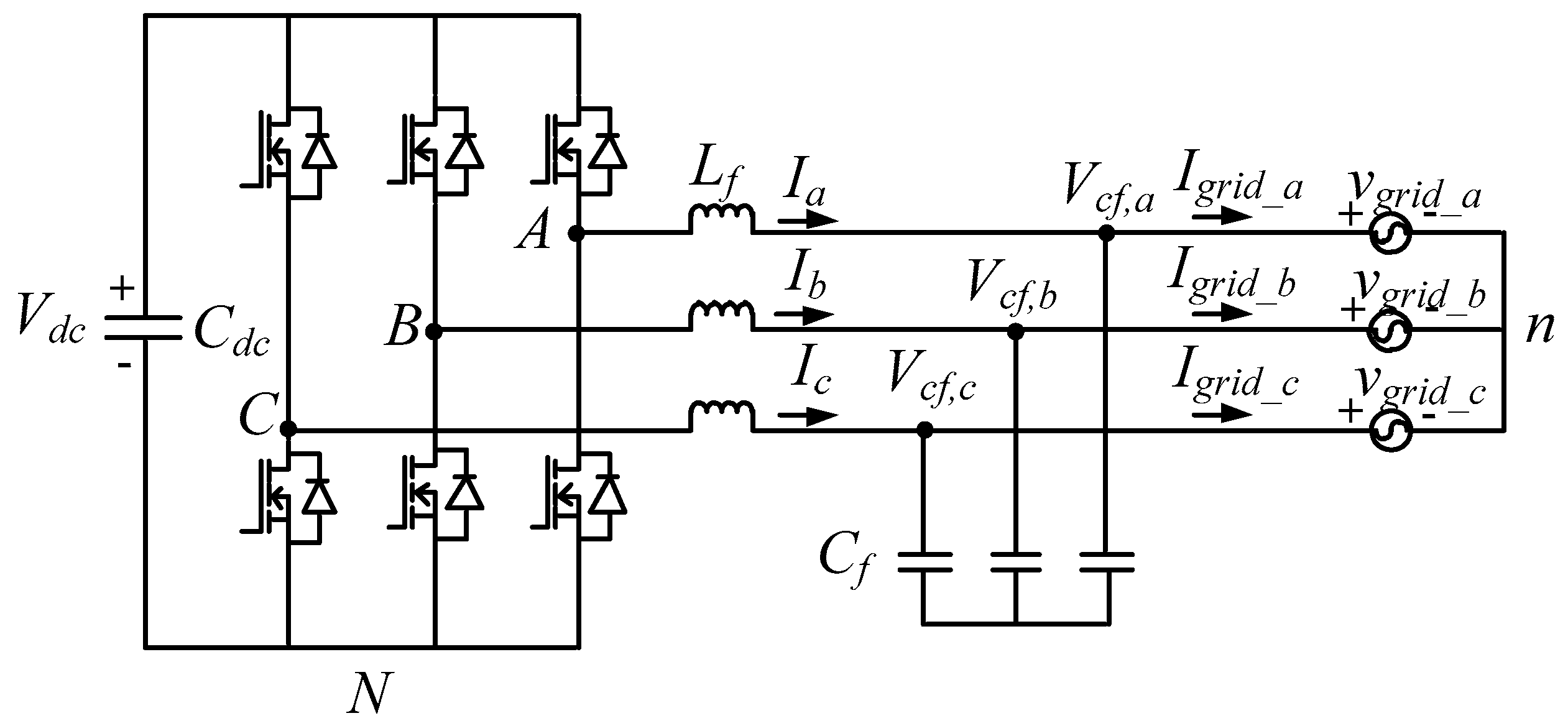
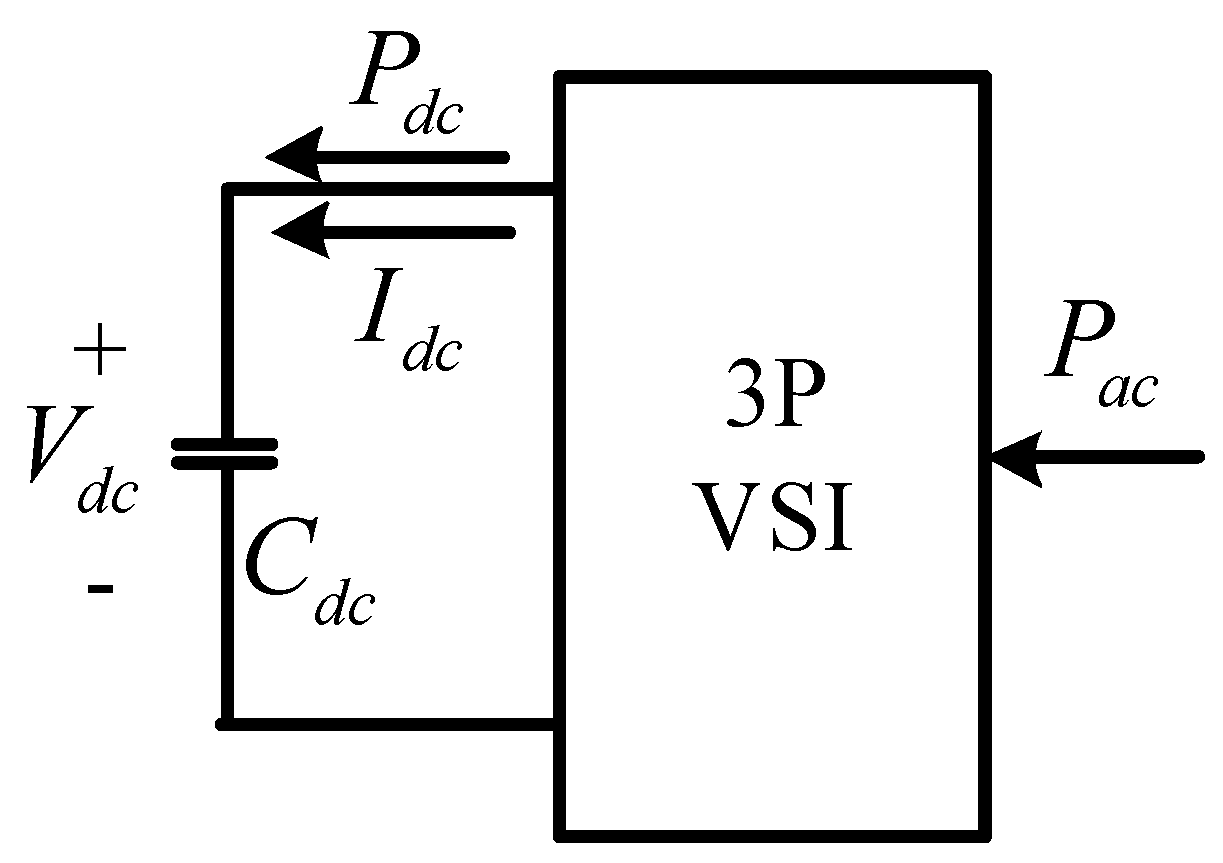
2. System Description
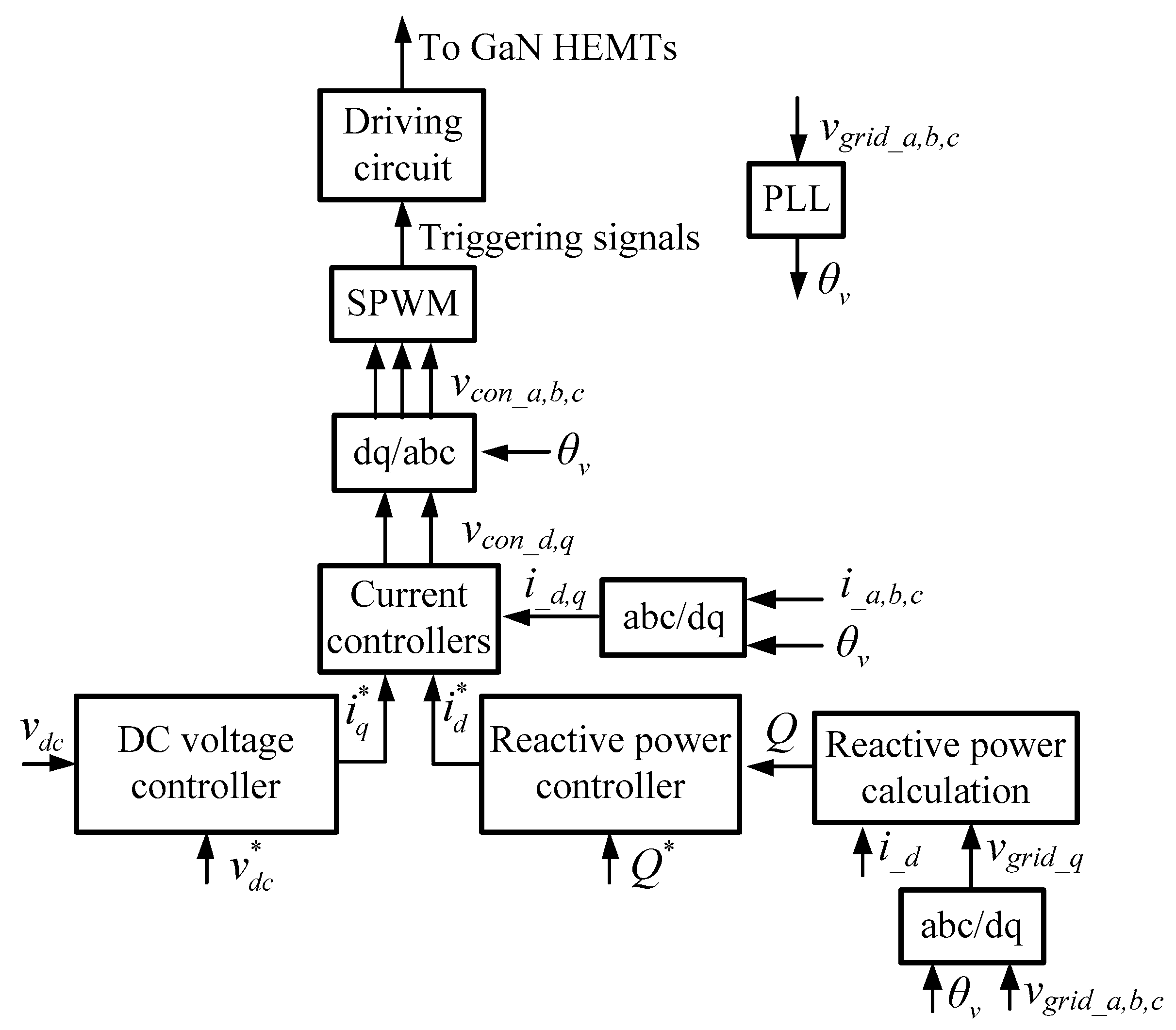
3. Controller Design
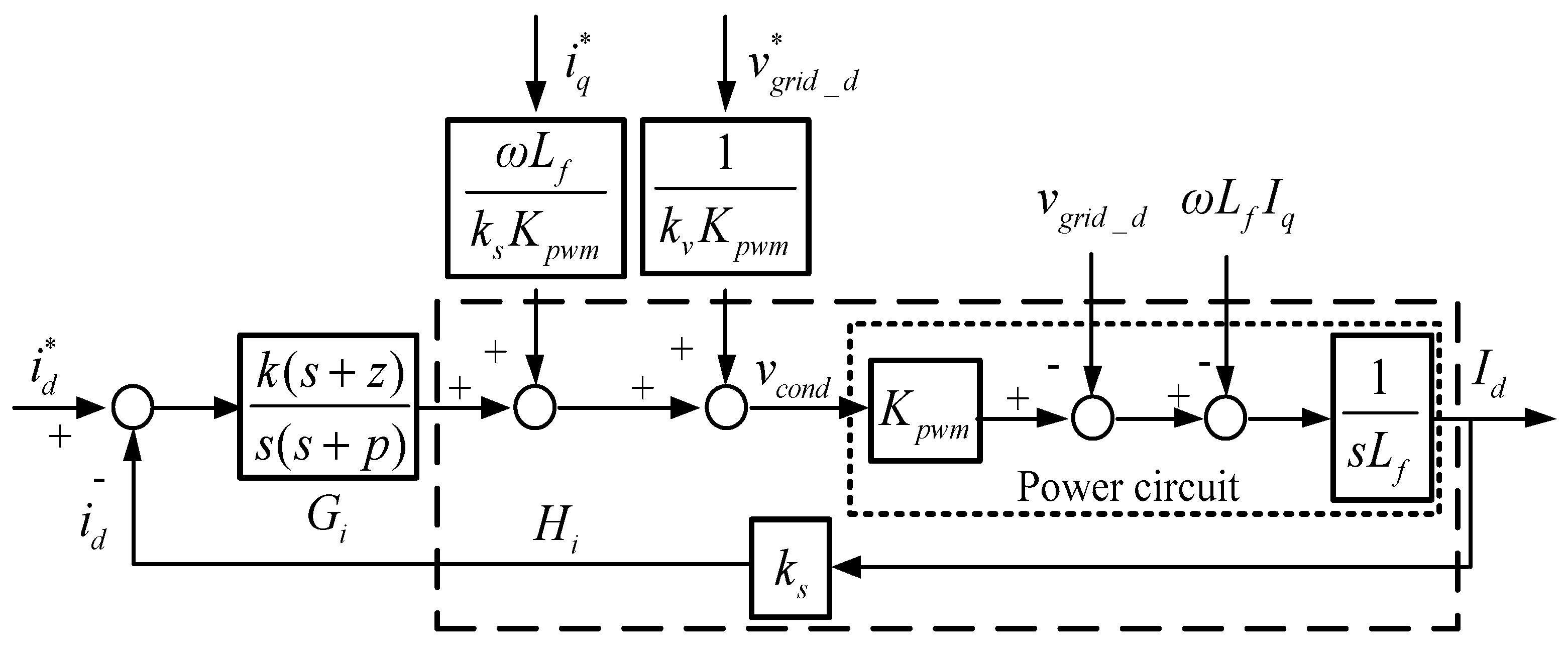
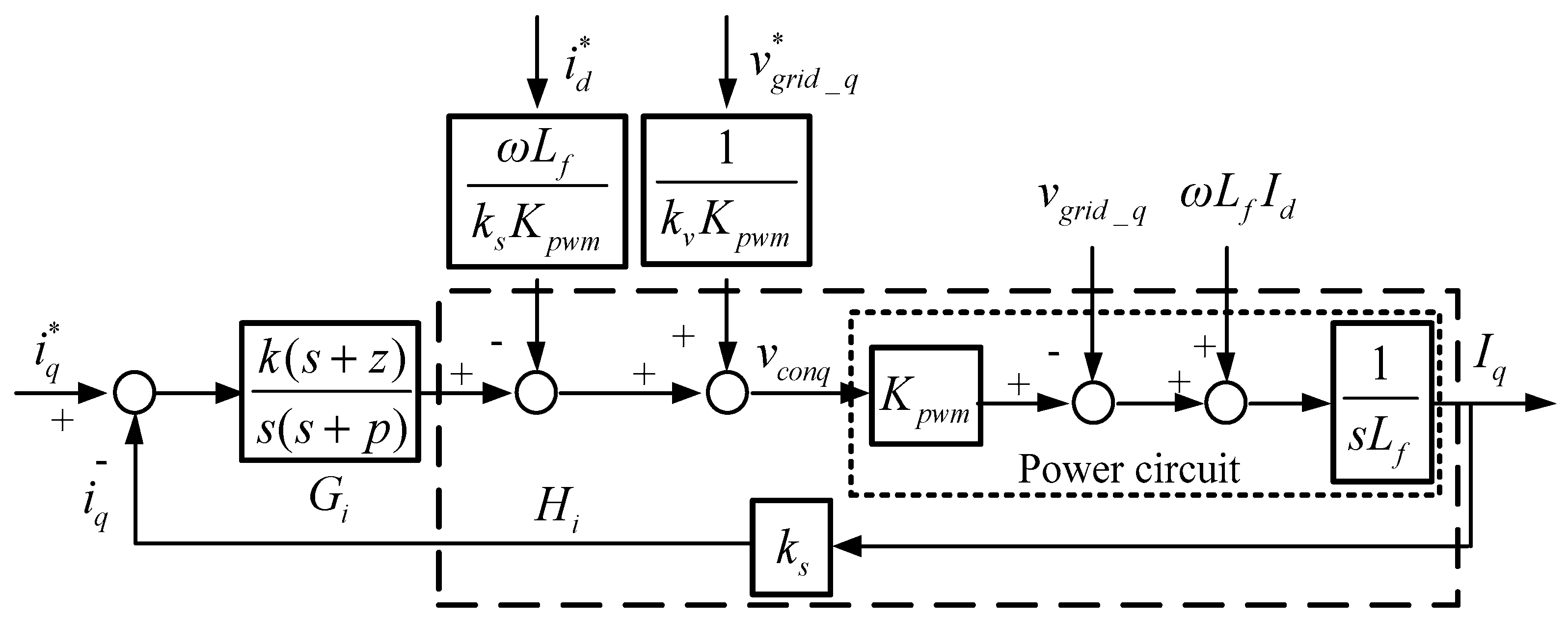
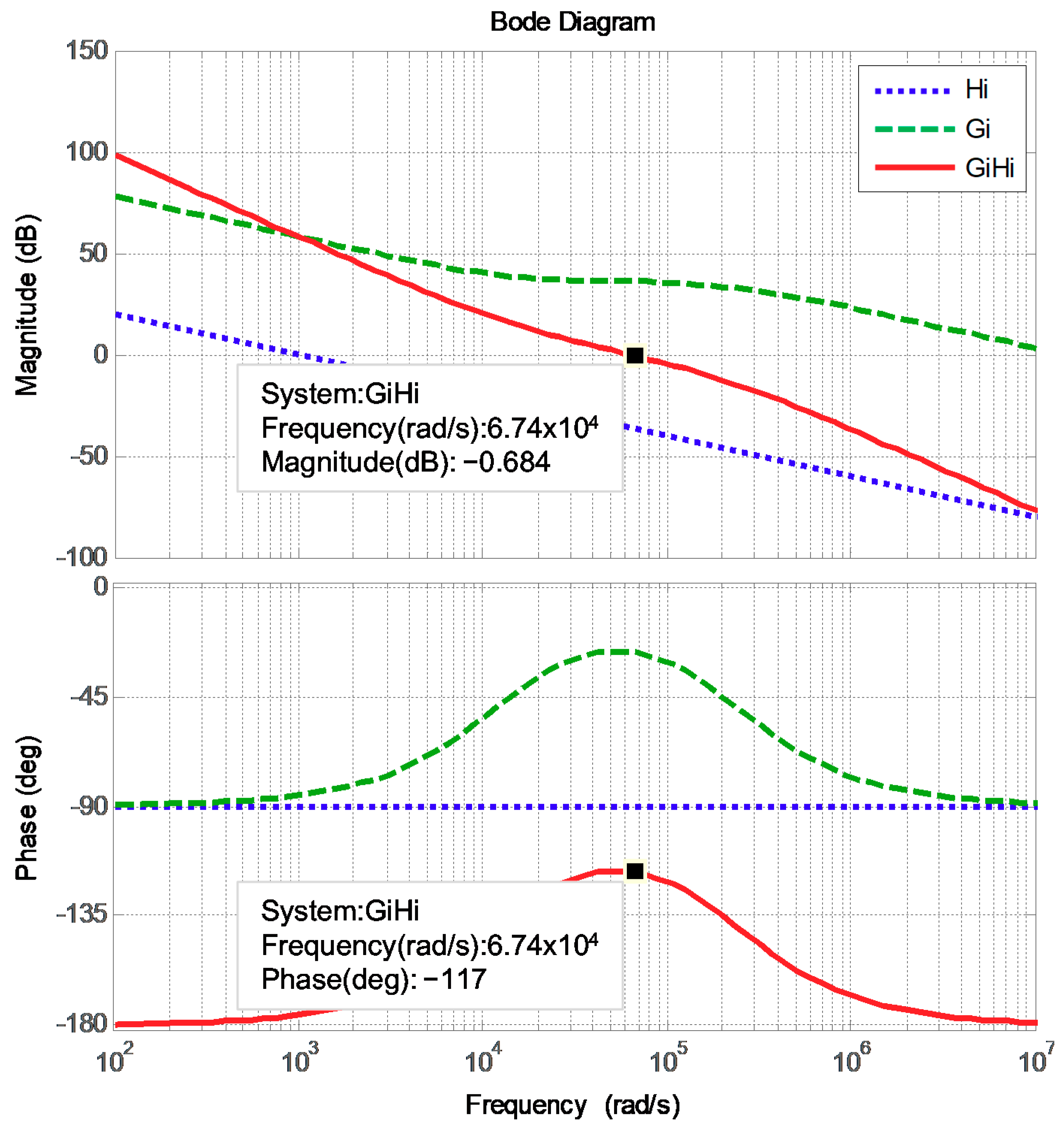
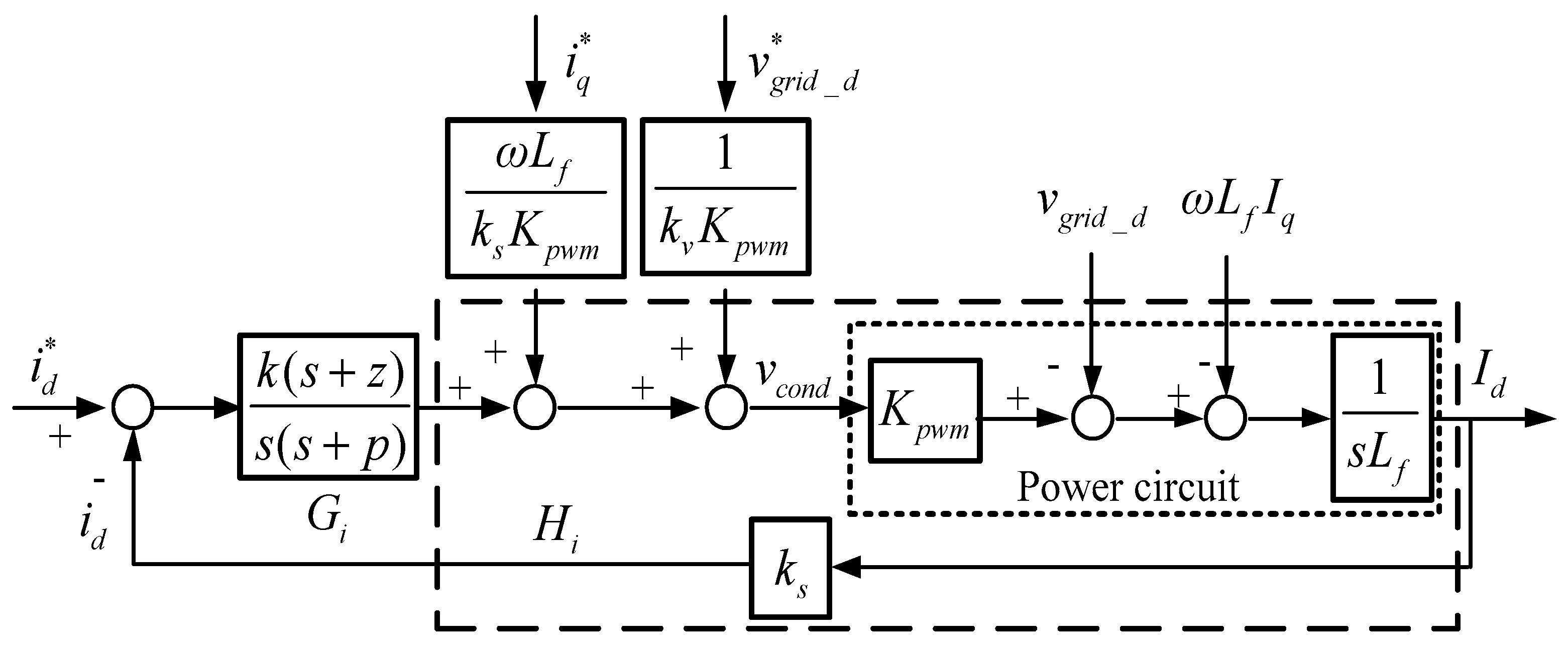
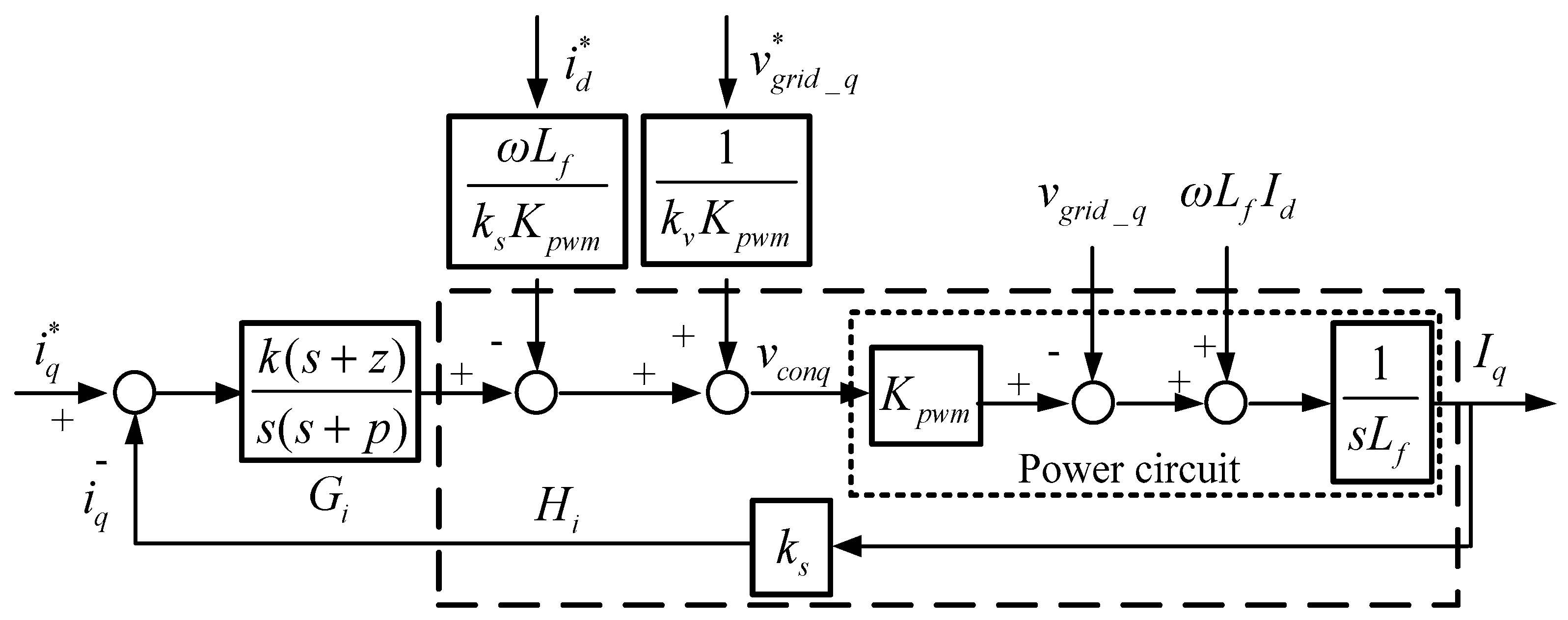
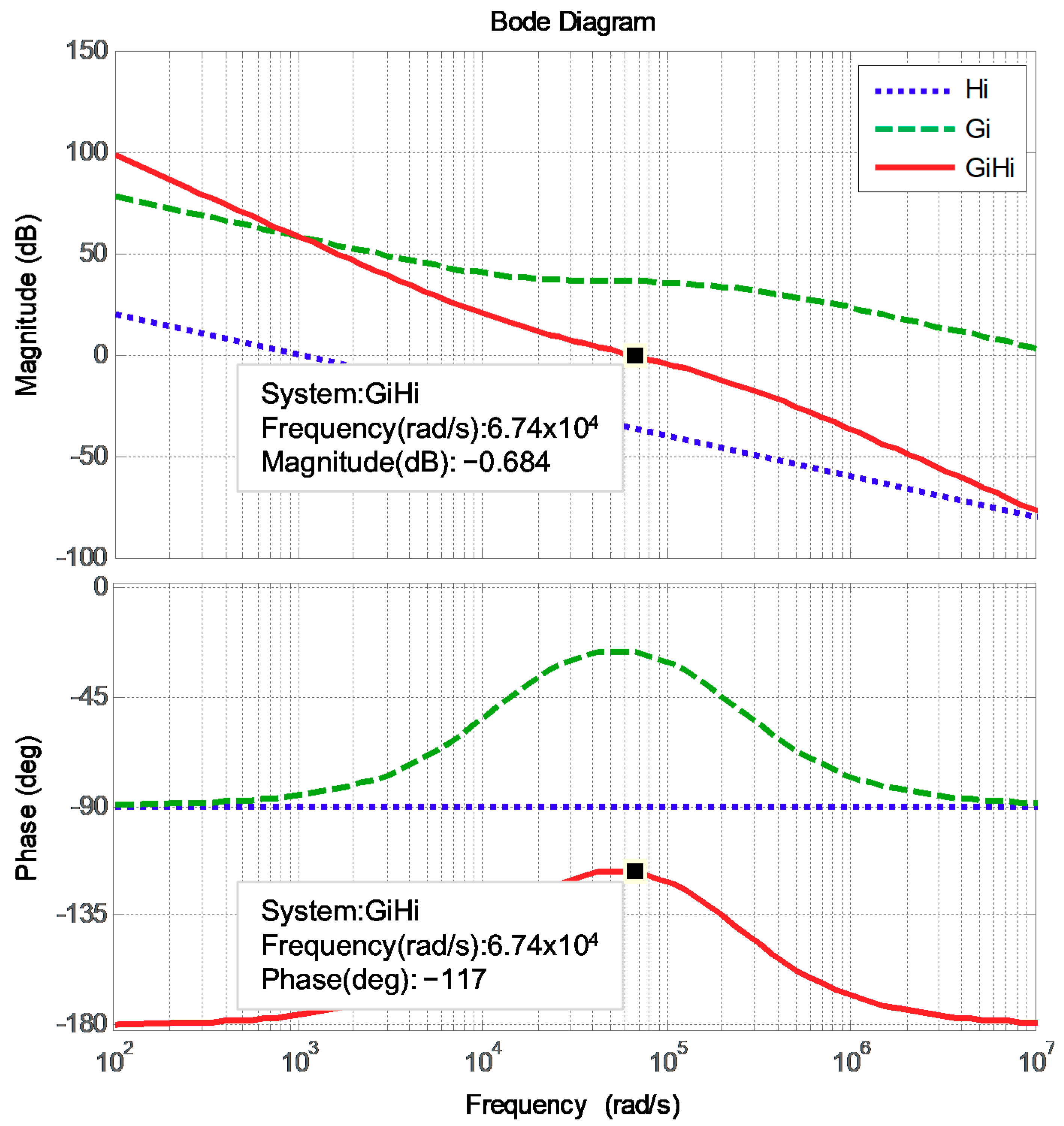
3.1. Design of Inductor Current Controllers
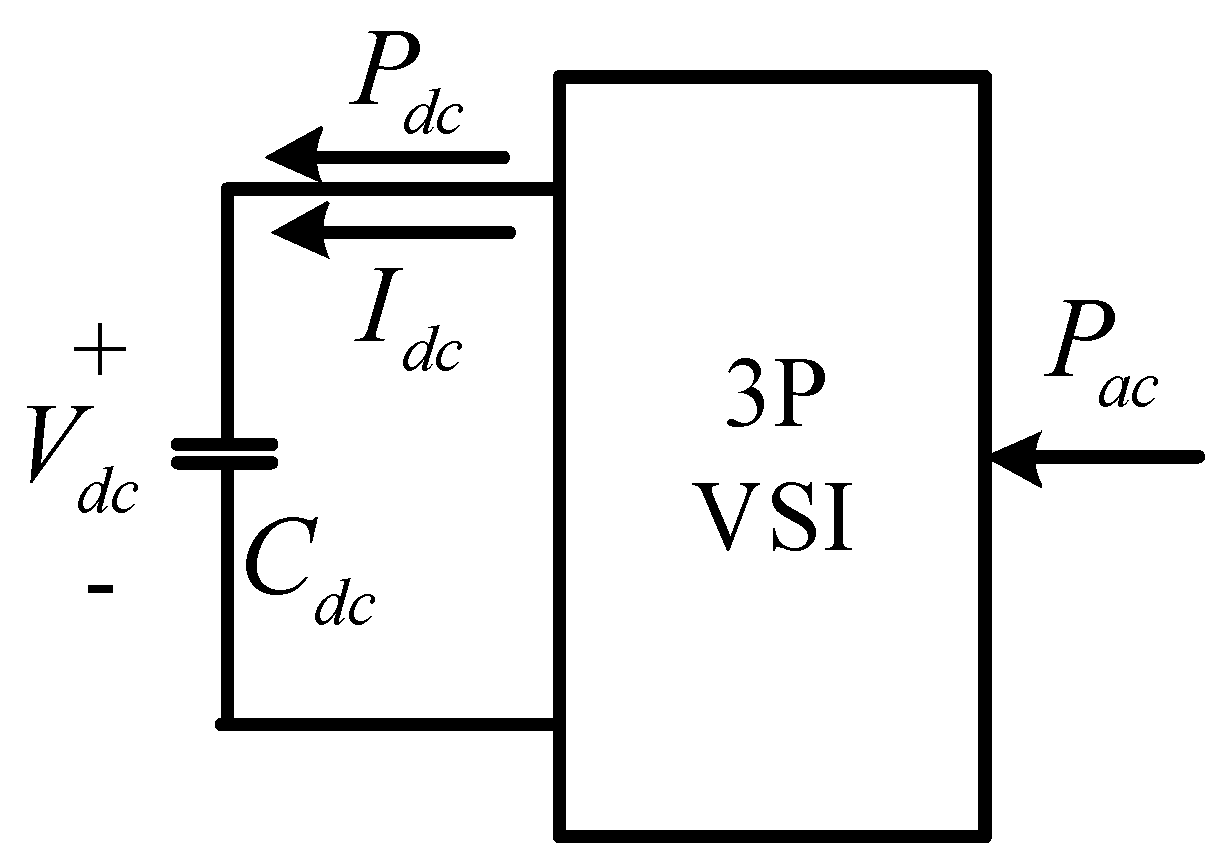
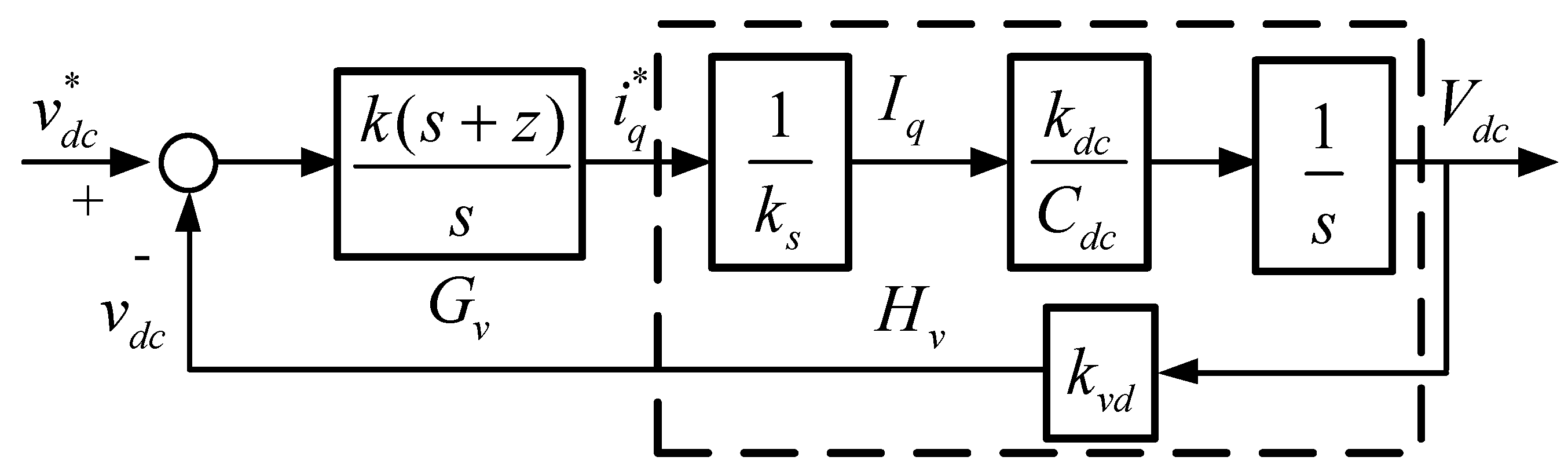
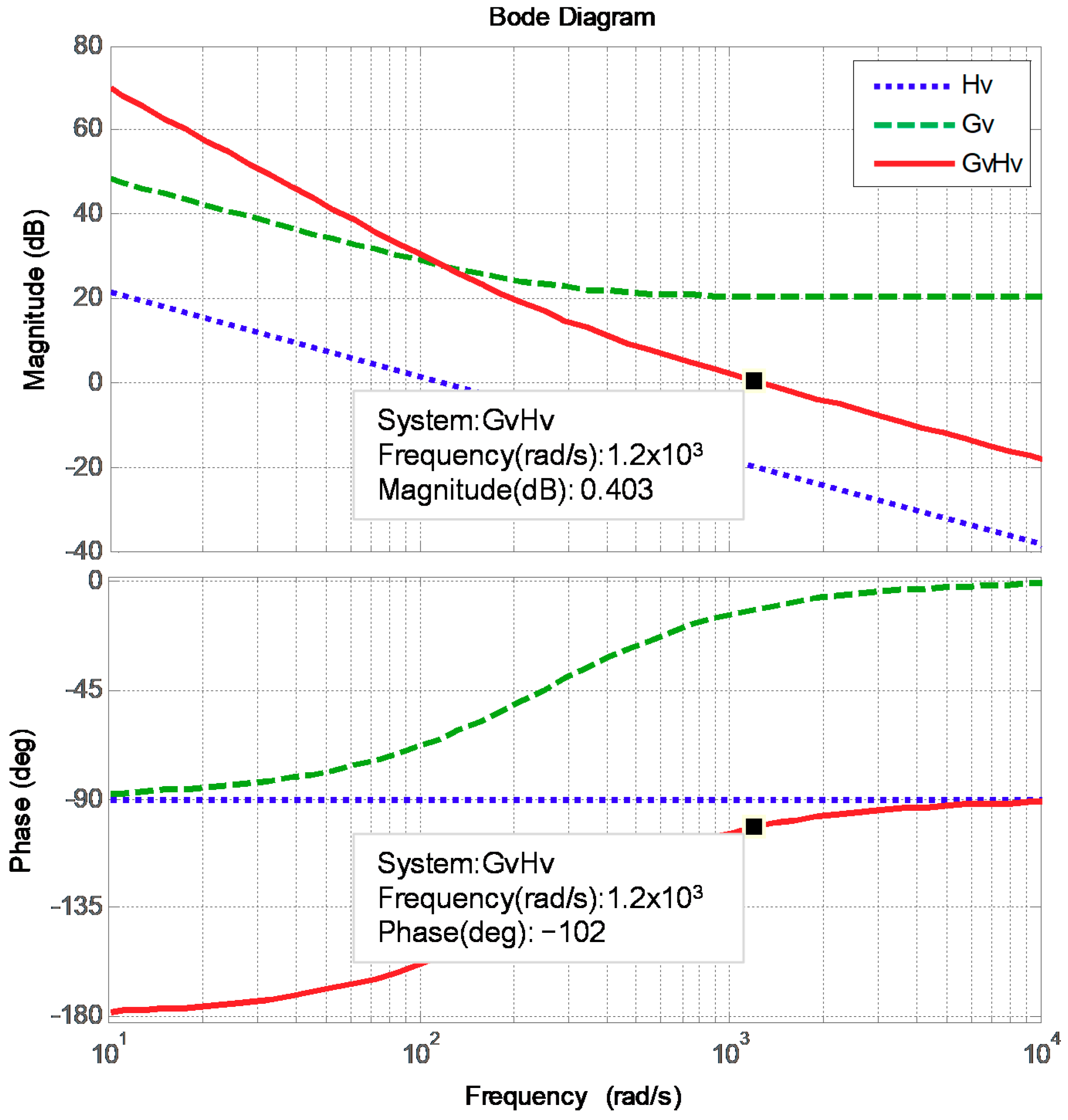
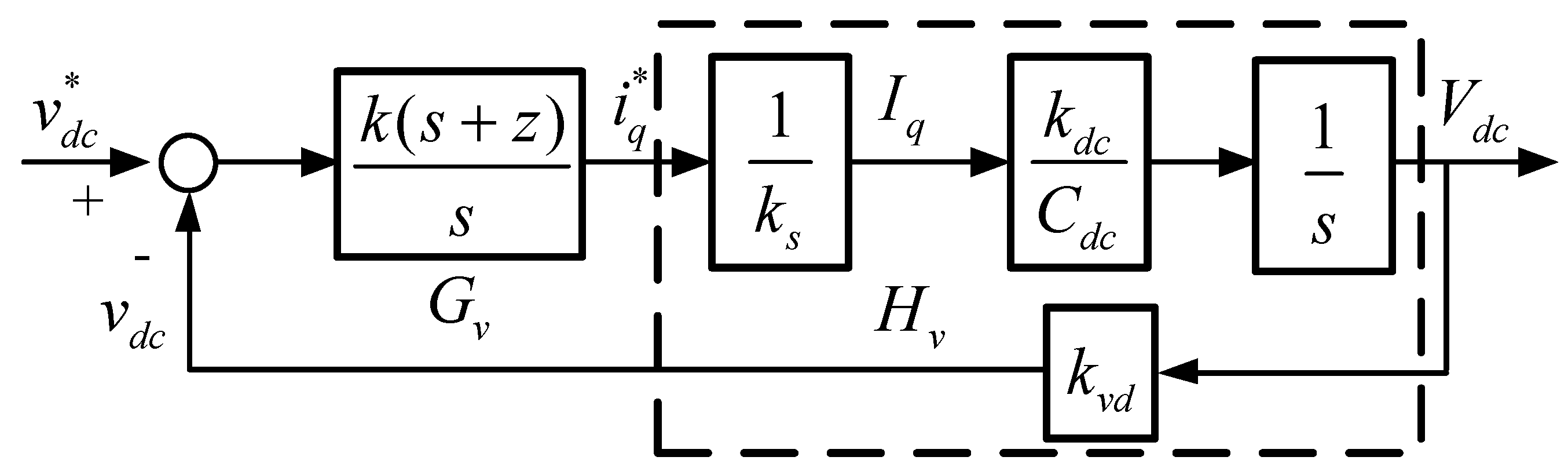
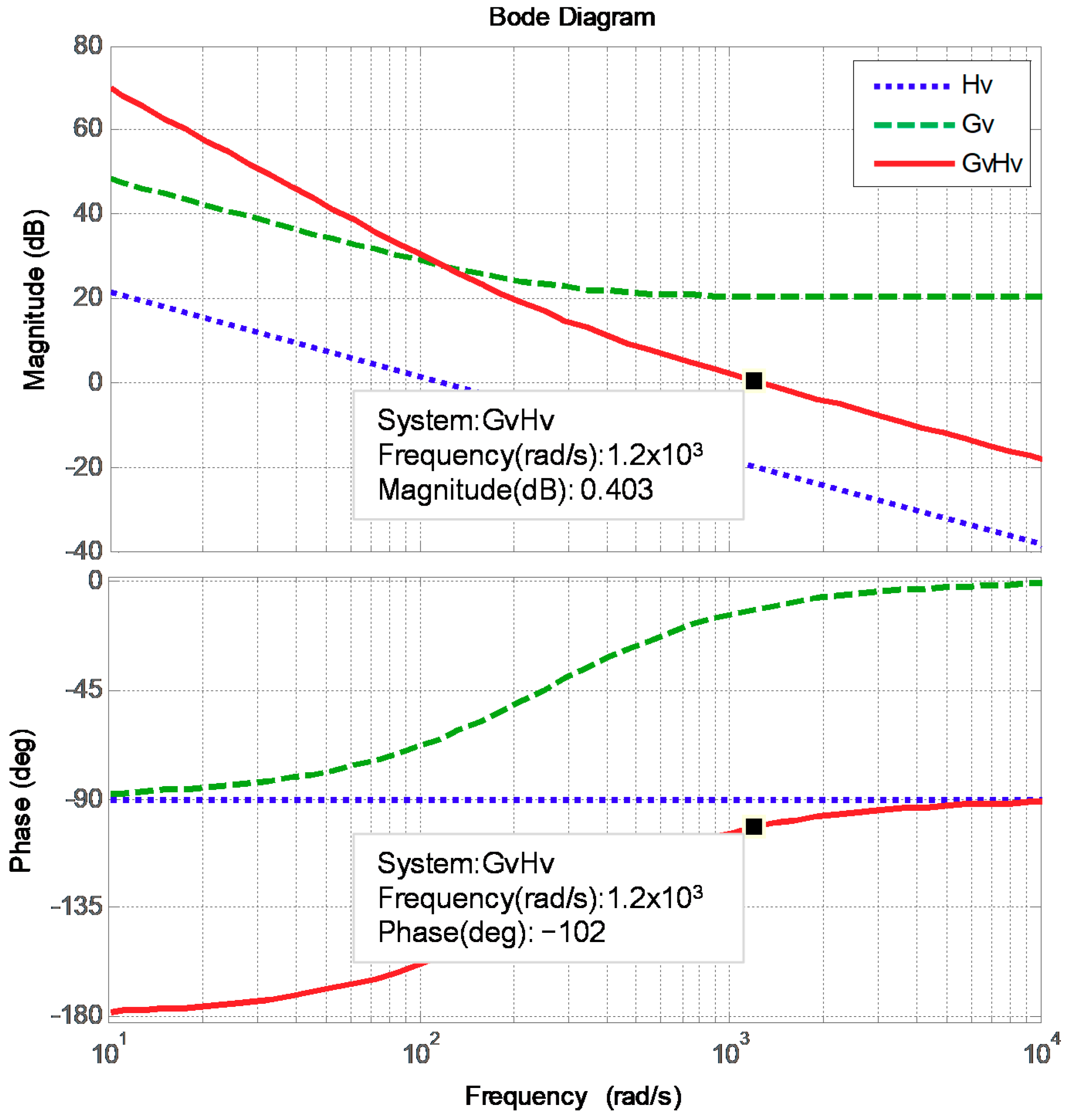
3.2. DC Link Voltage Controller
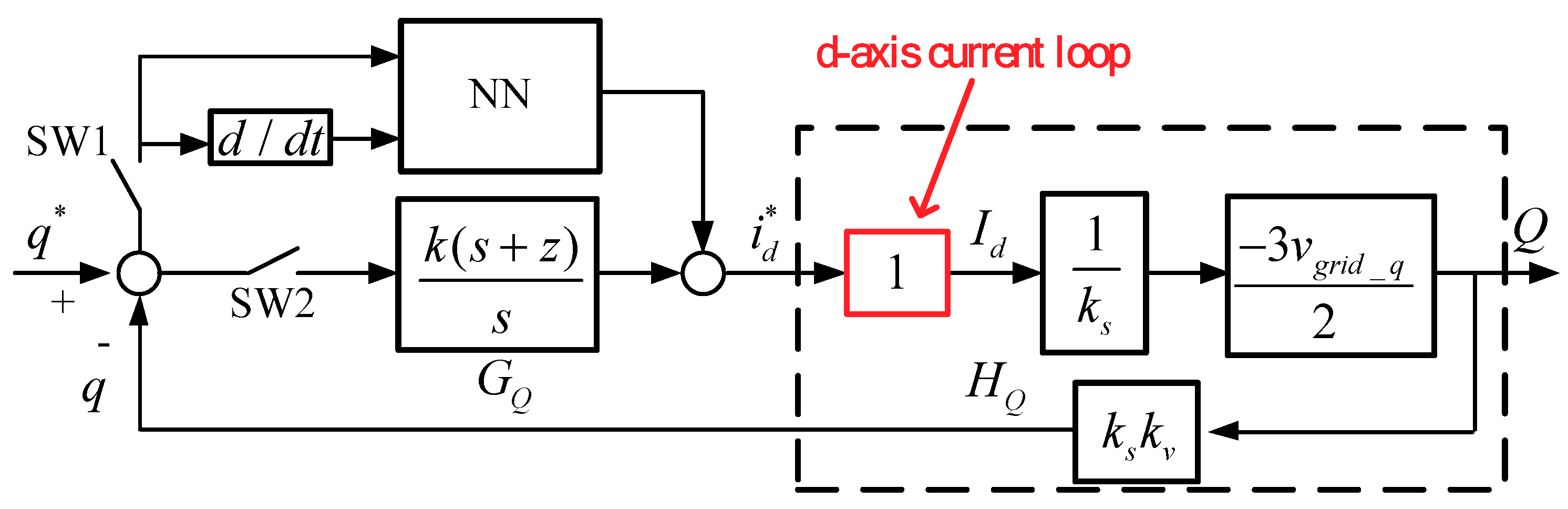
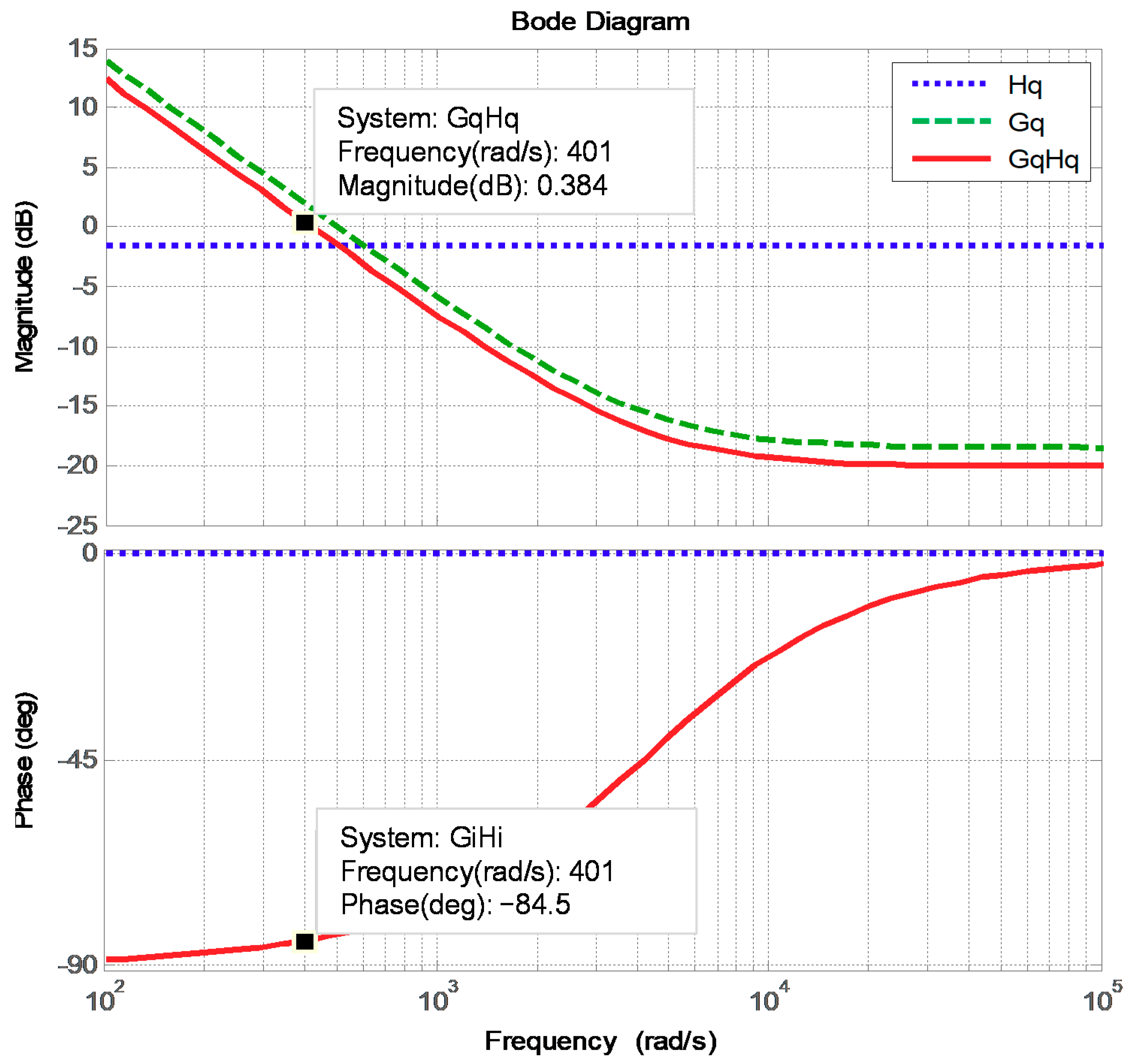
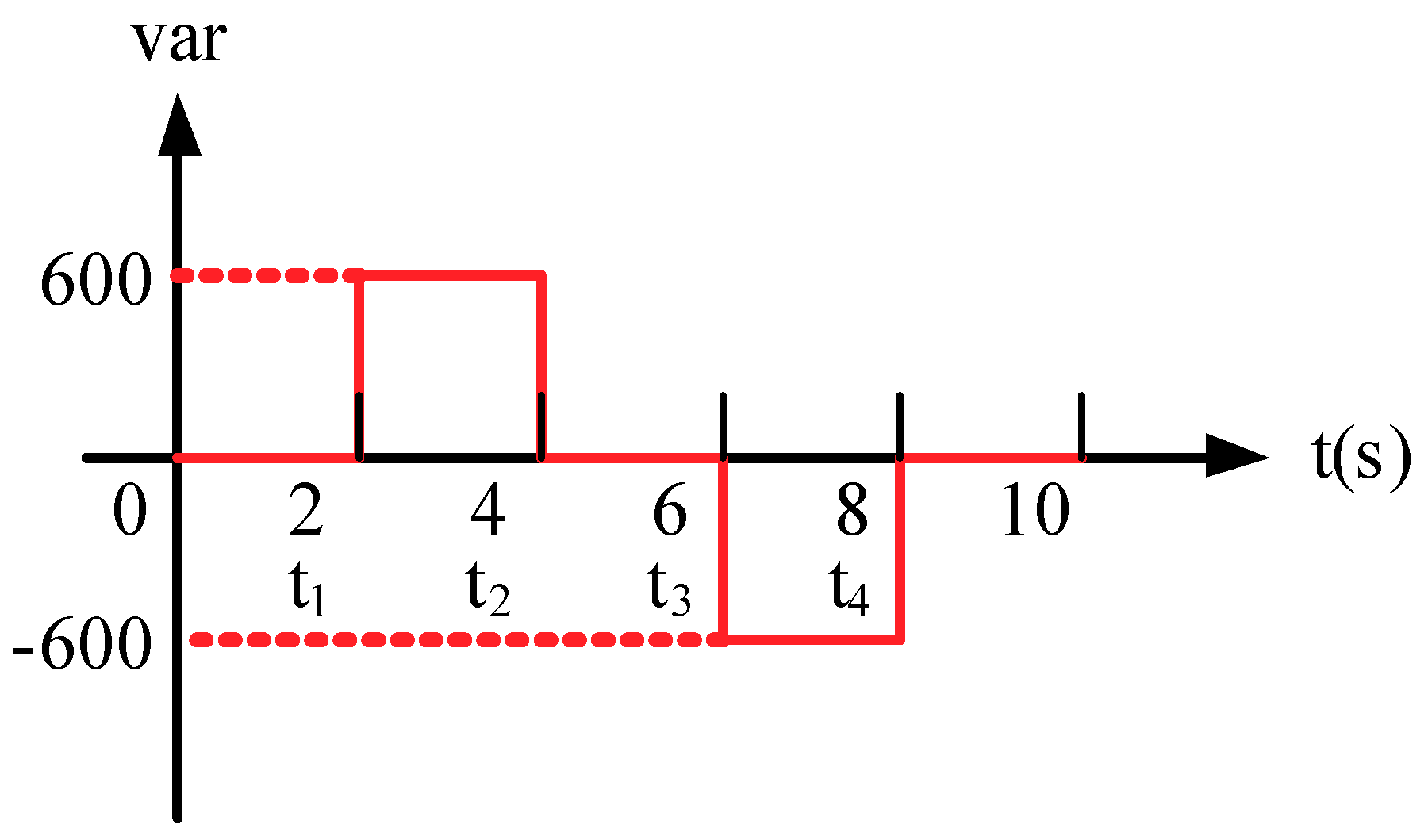
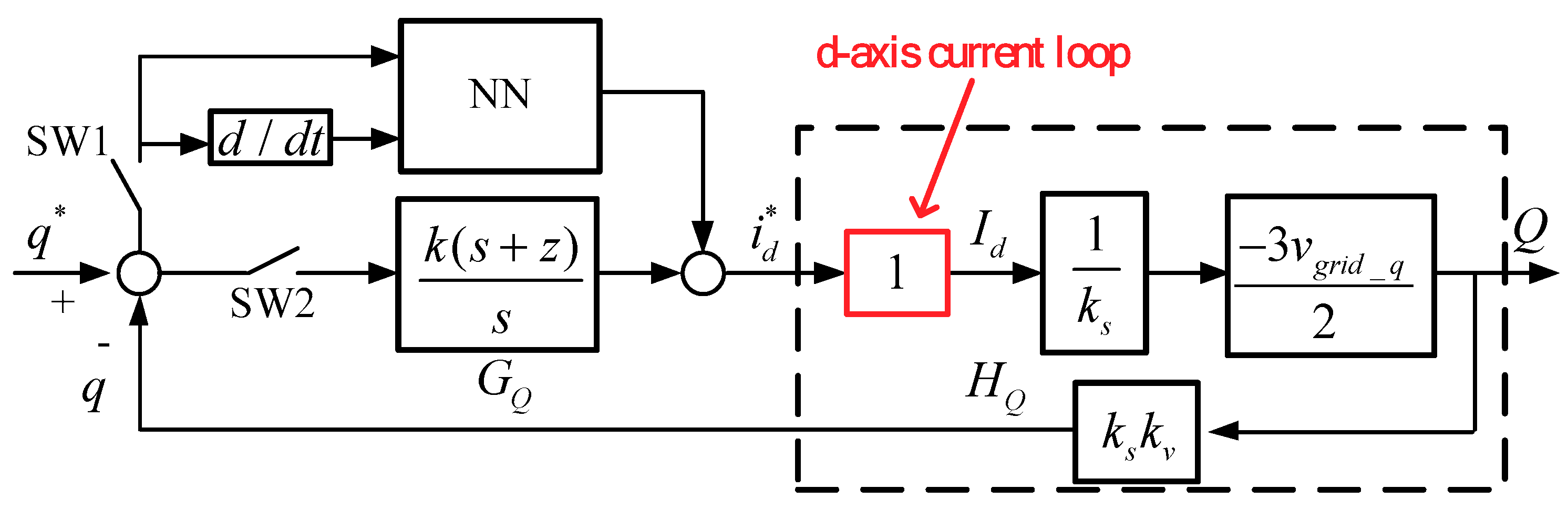
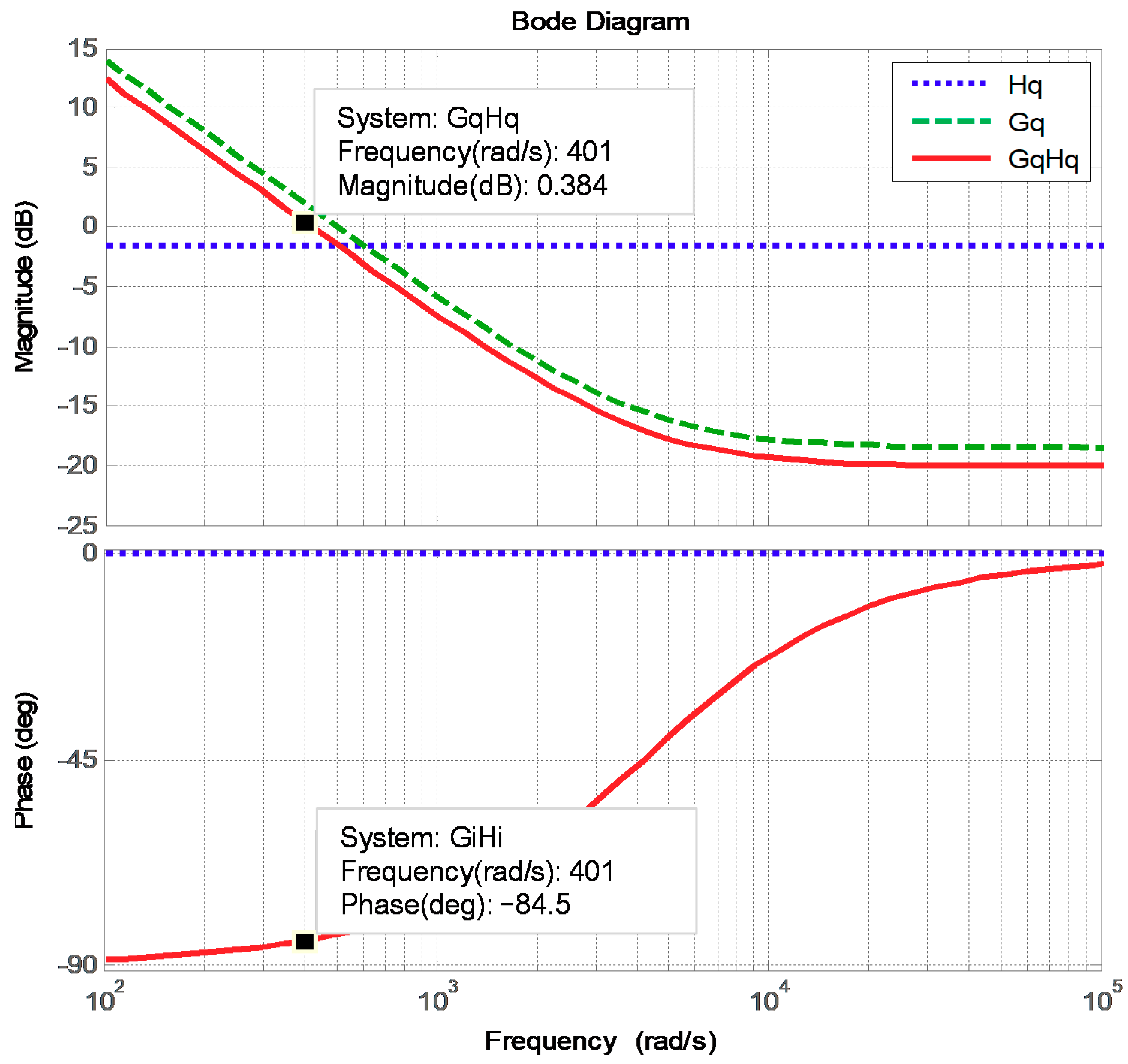
3.3. Reactive Power Controller
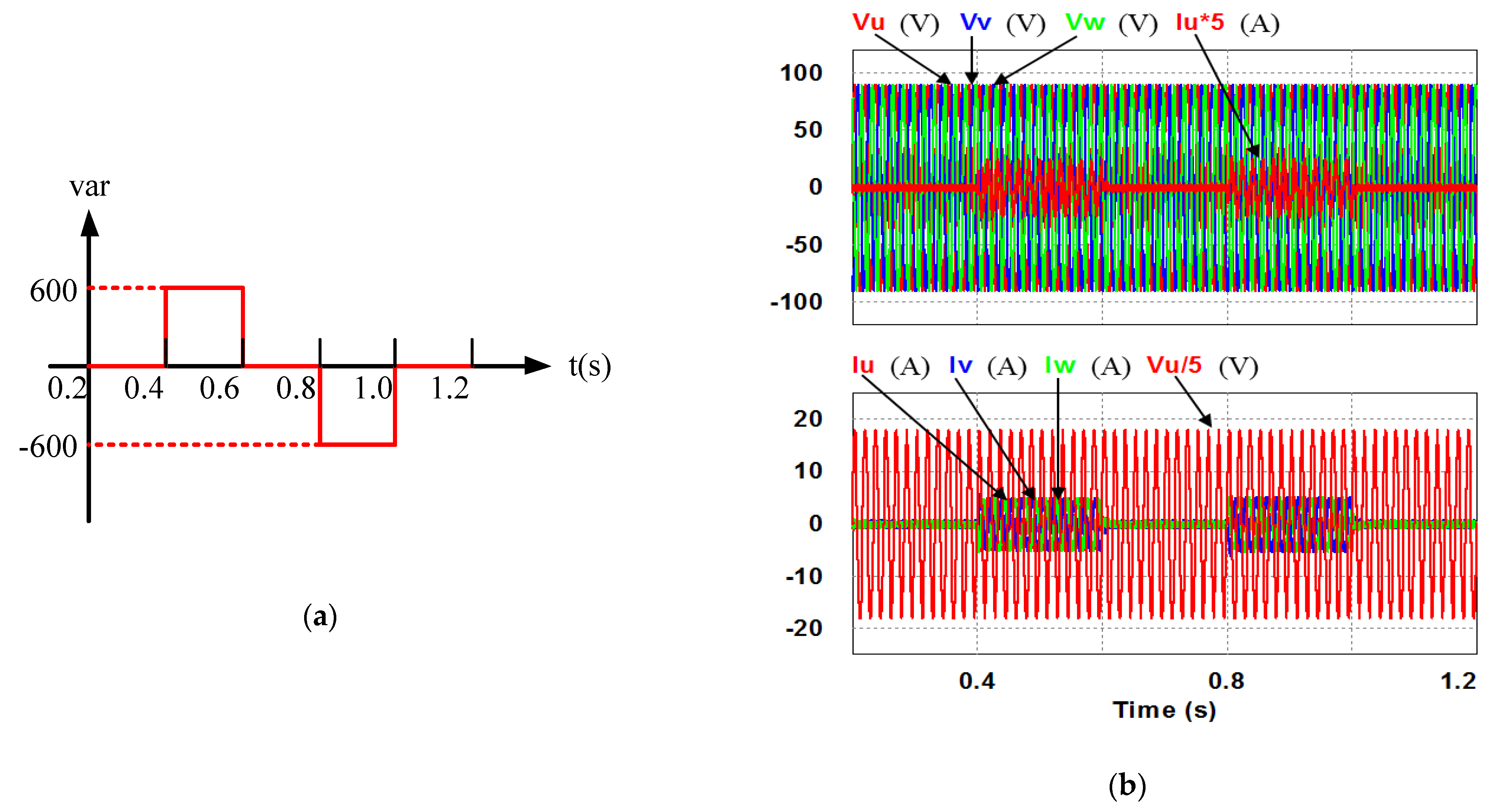
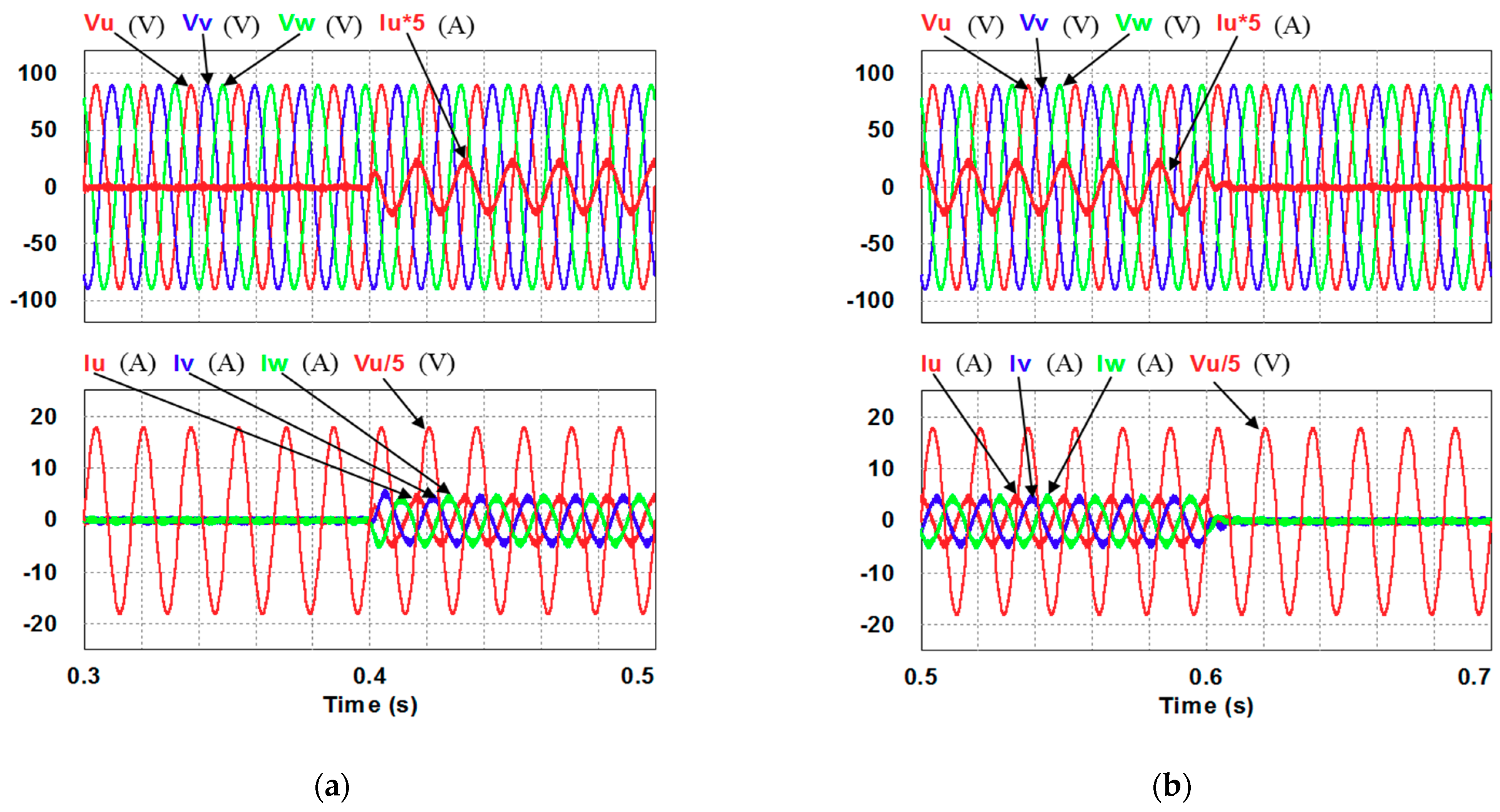
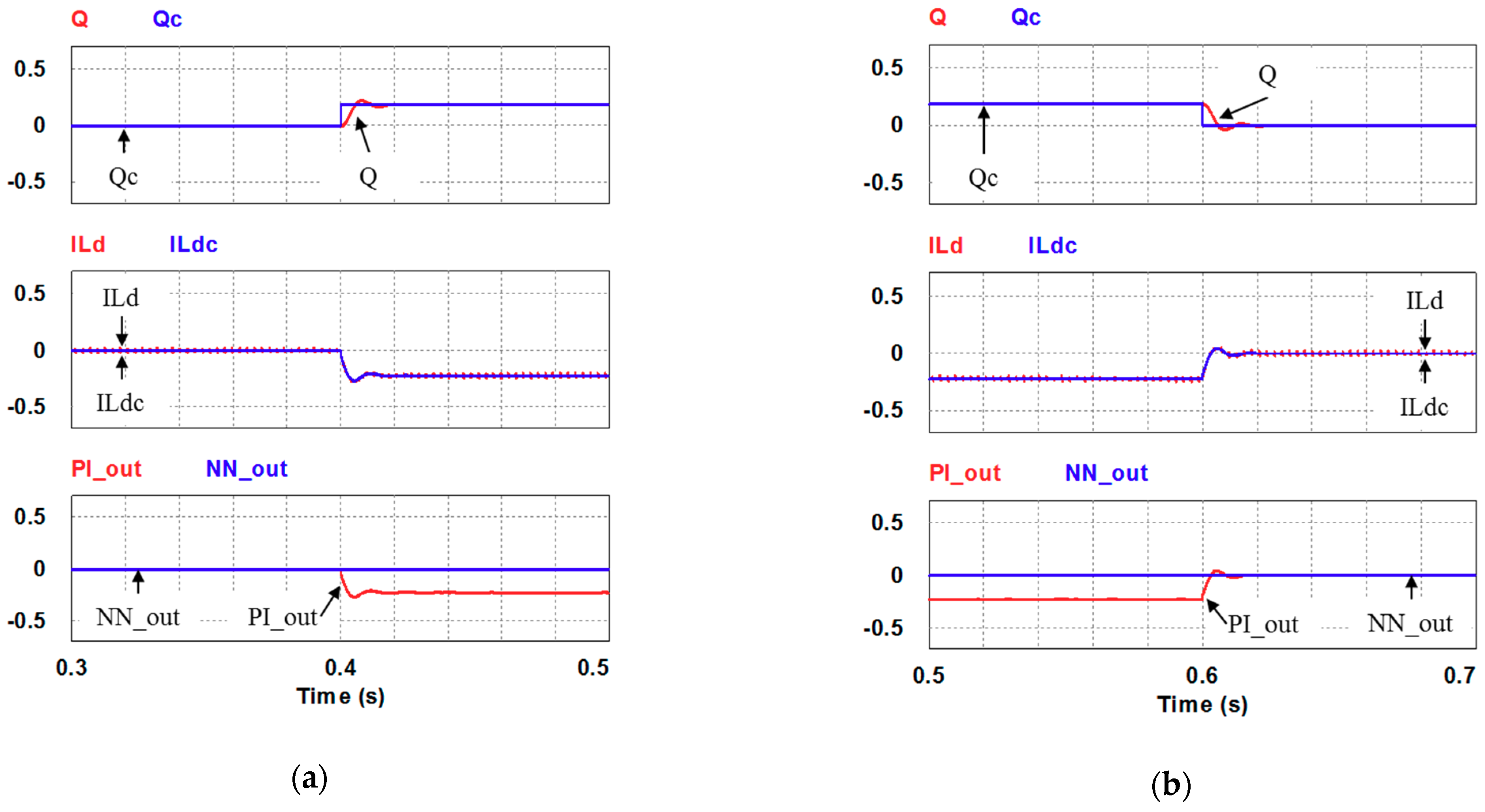
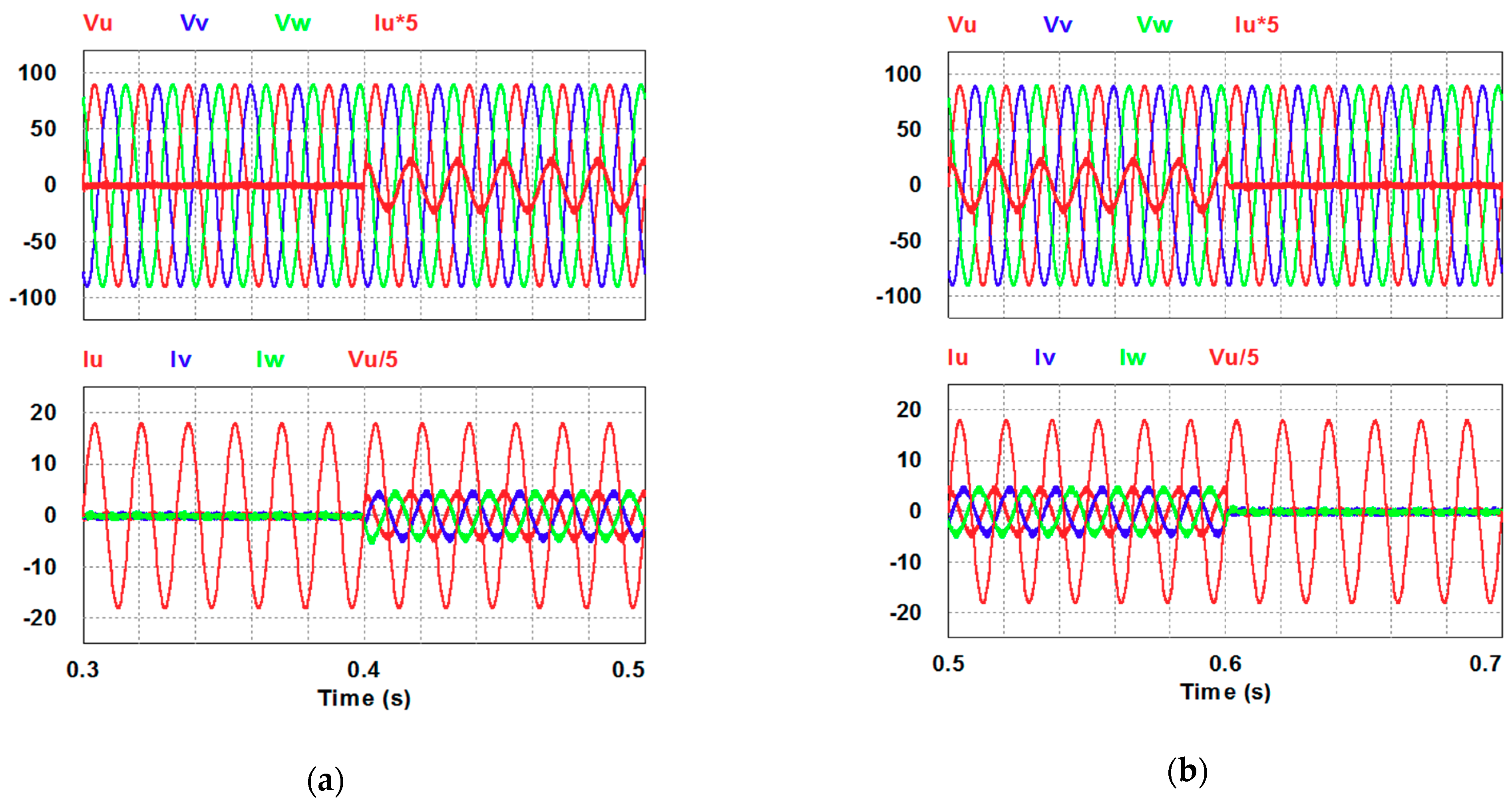
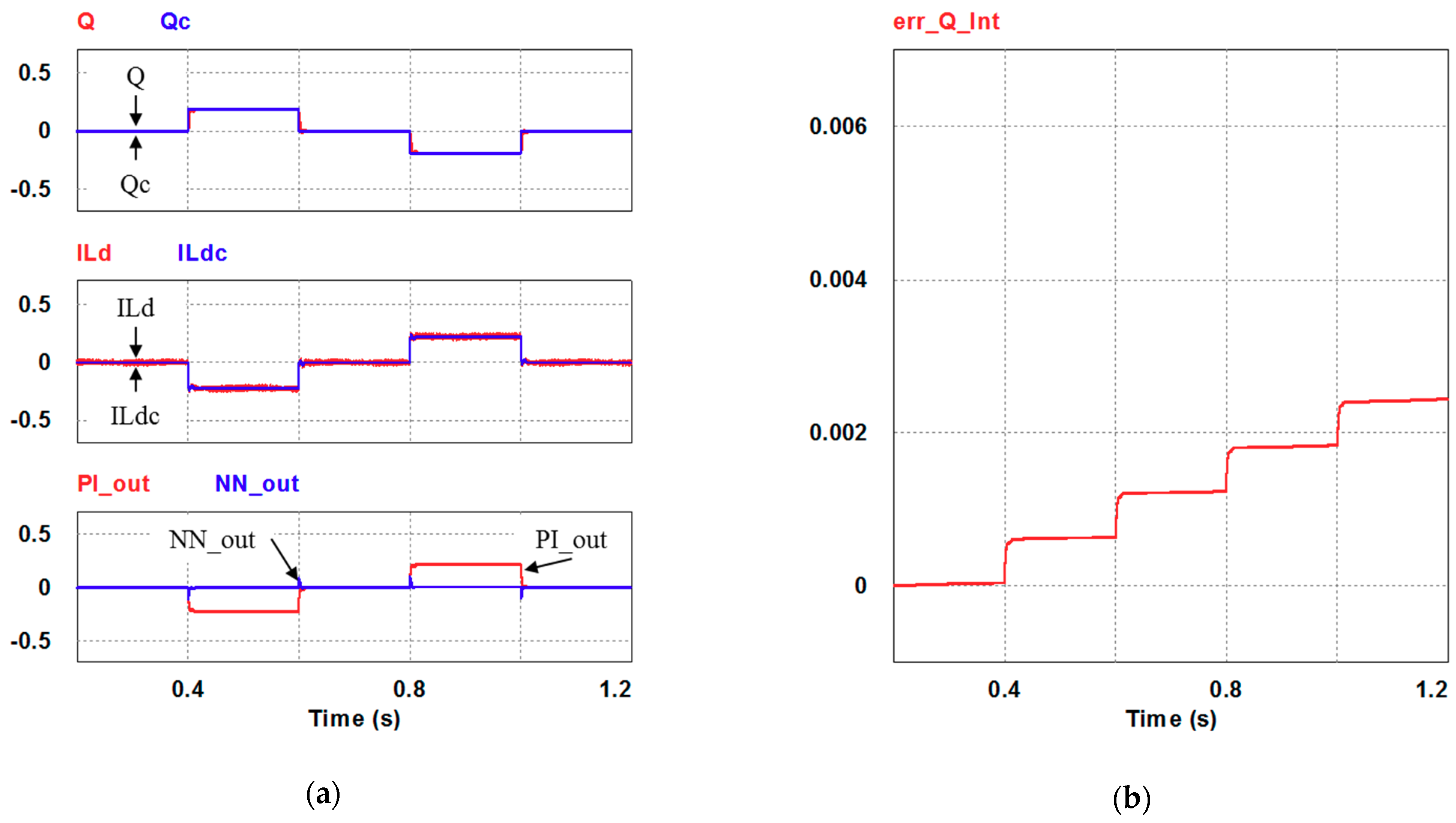
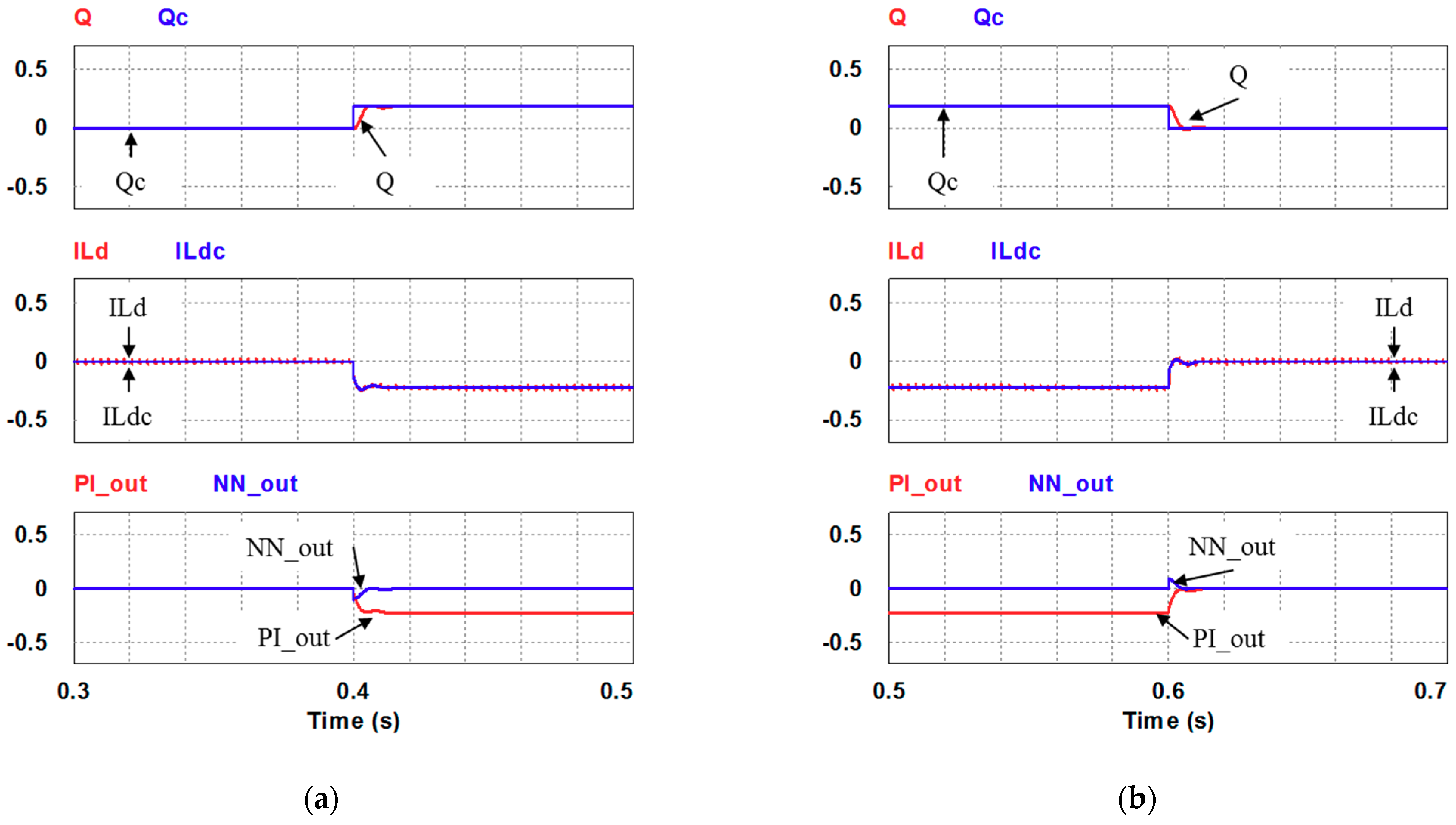
4. Simulation Study
4.1. Results of Simulation Case 1: PI Controller
4.2. Results of Simulation Case 2: PI Controller + RBFNN Controller
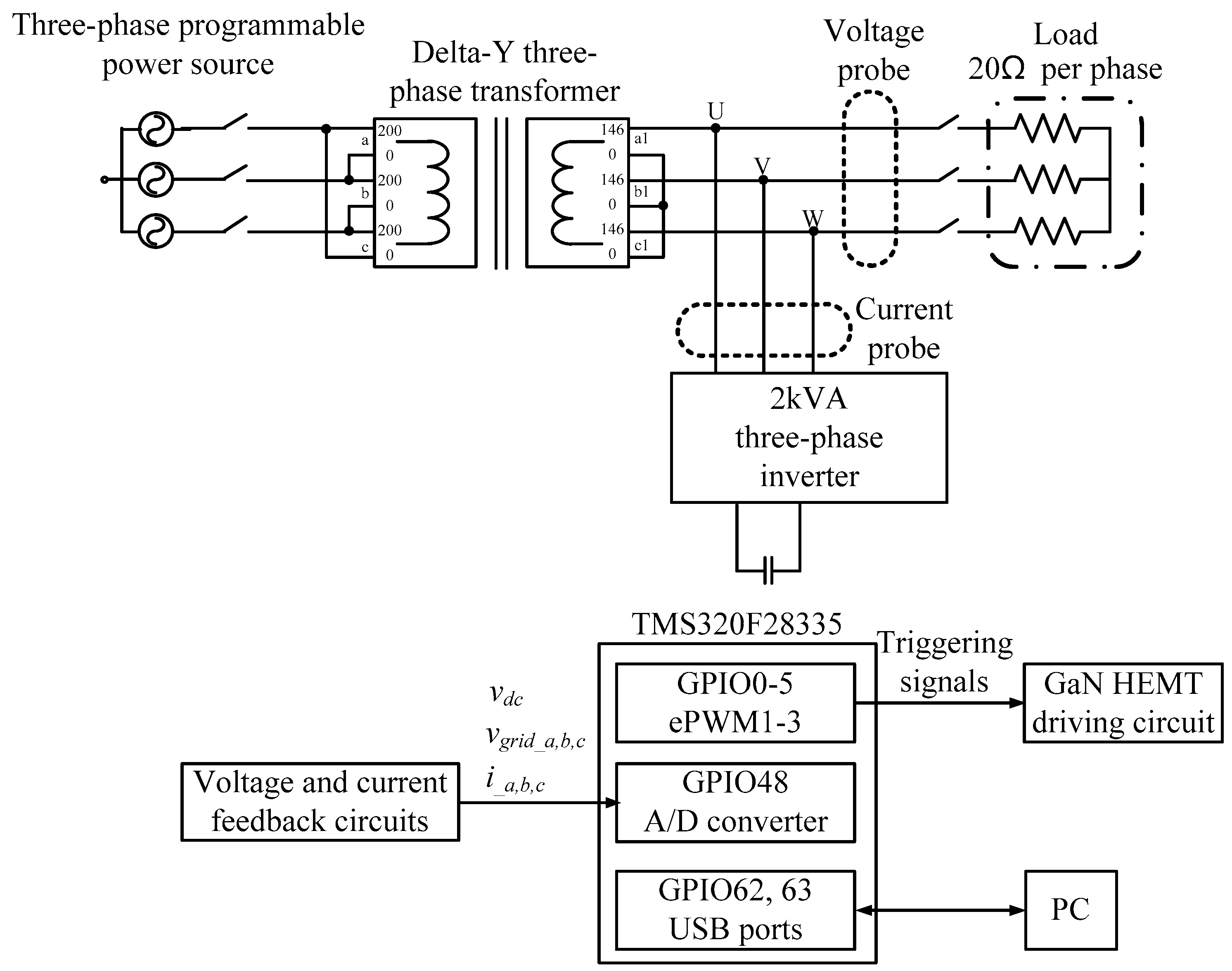
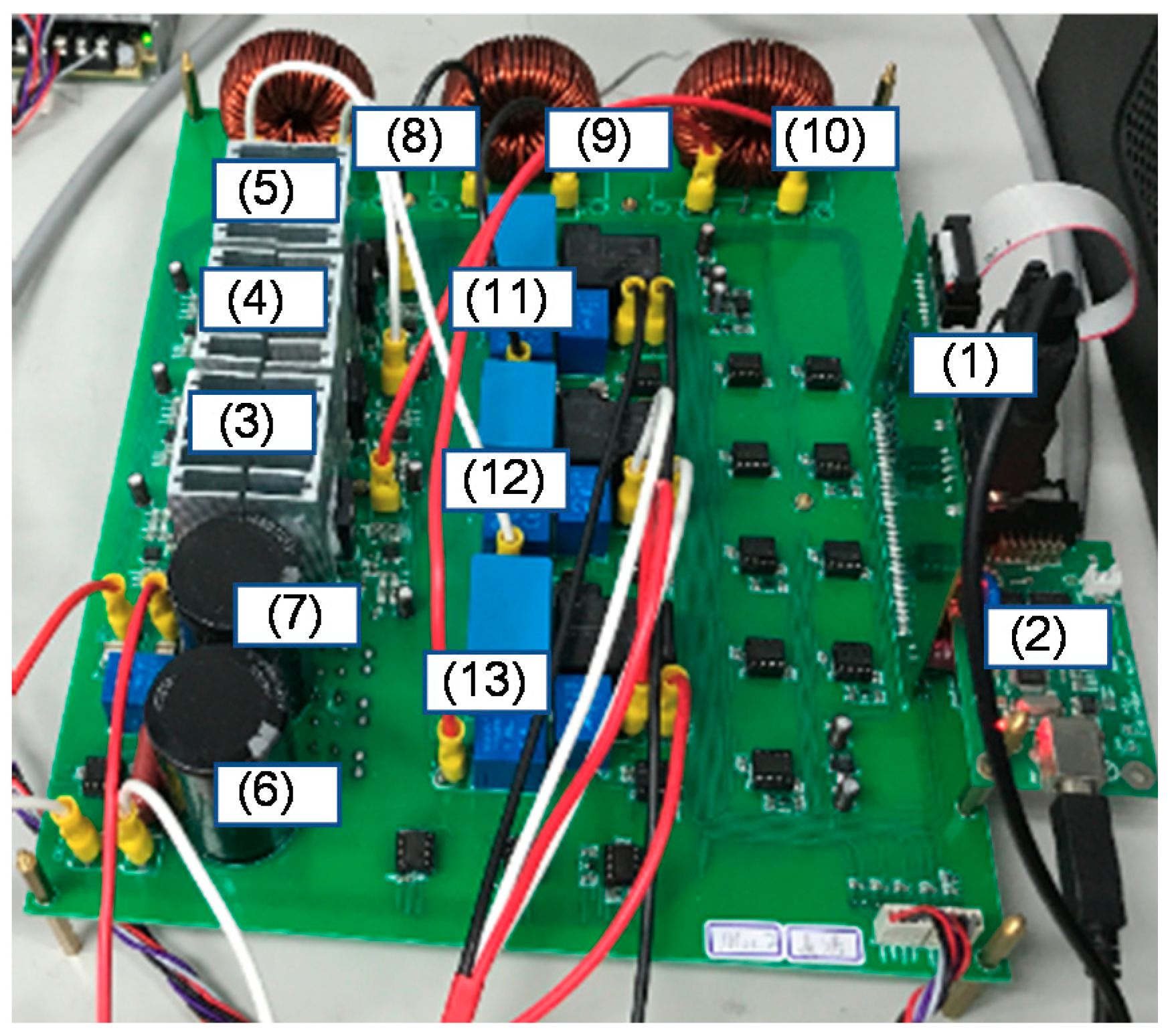
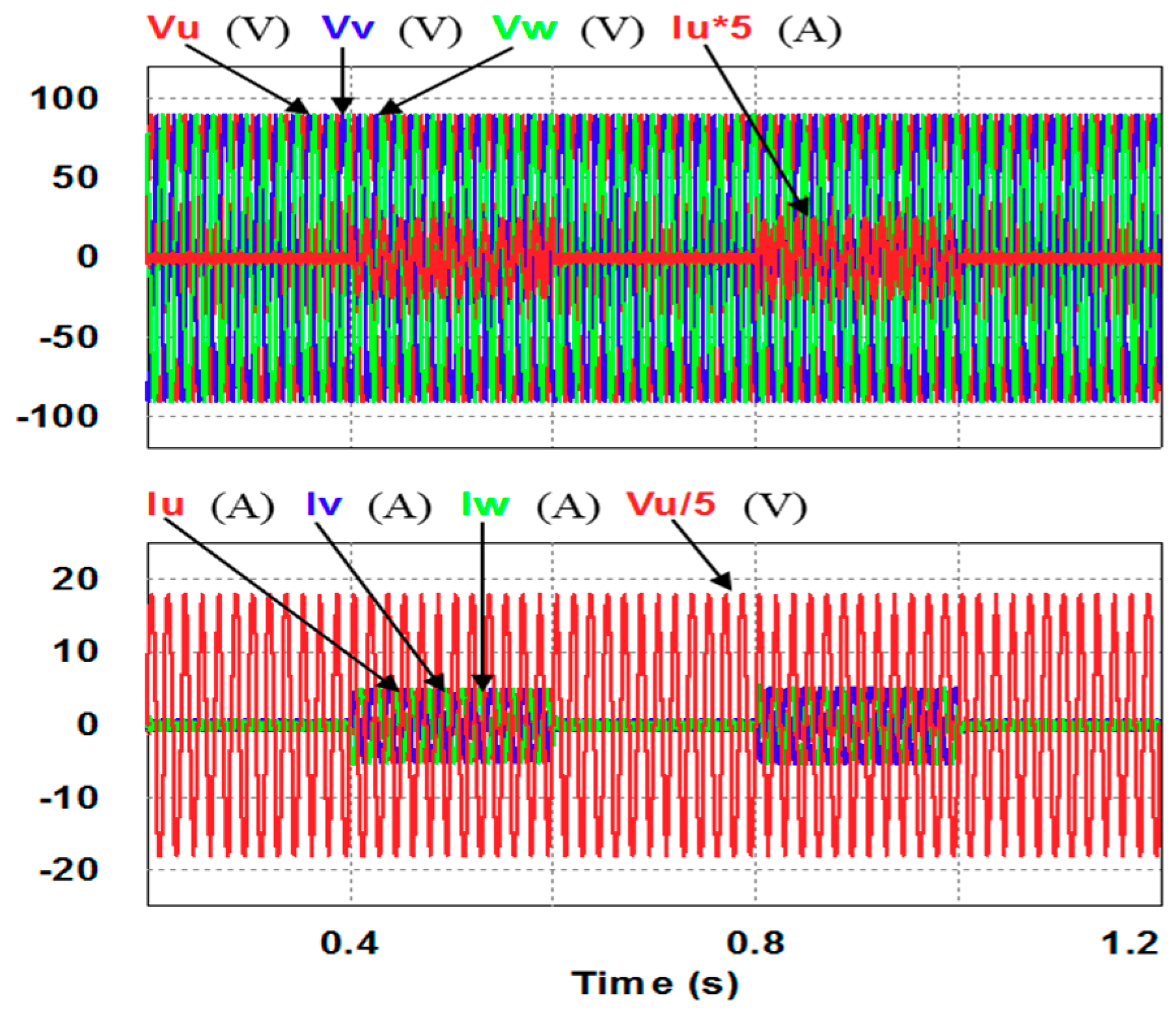
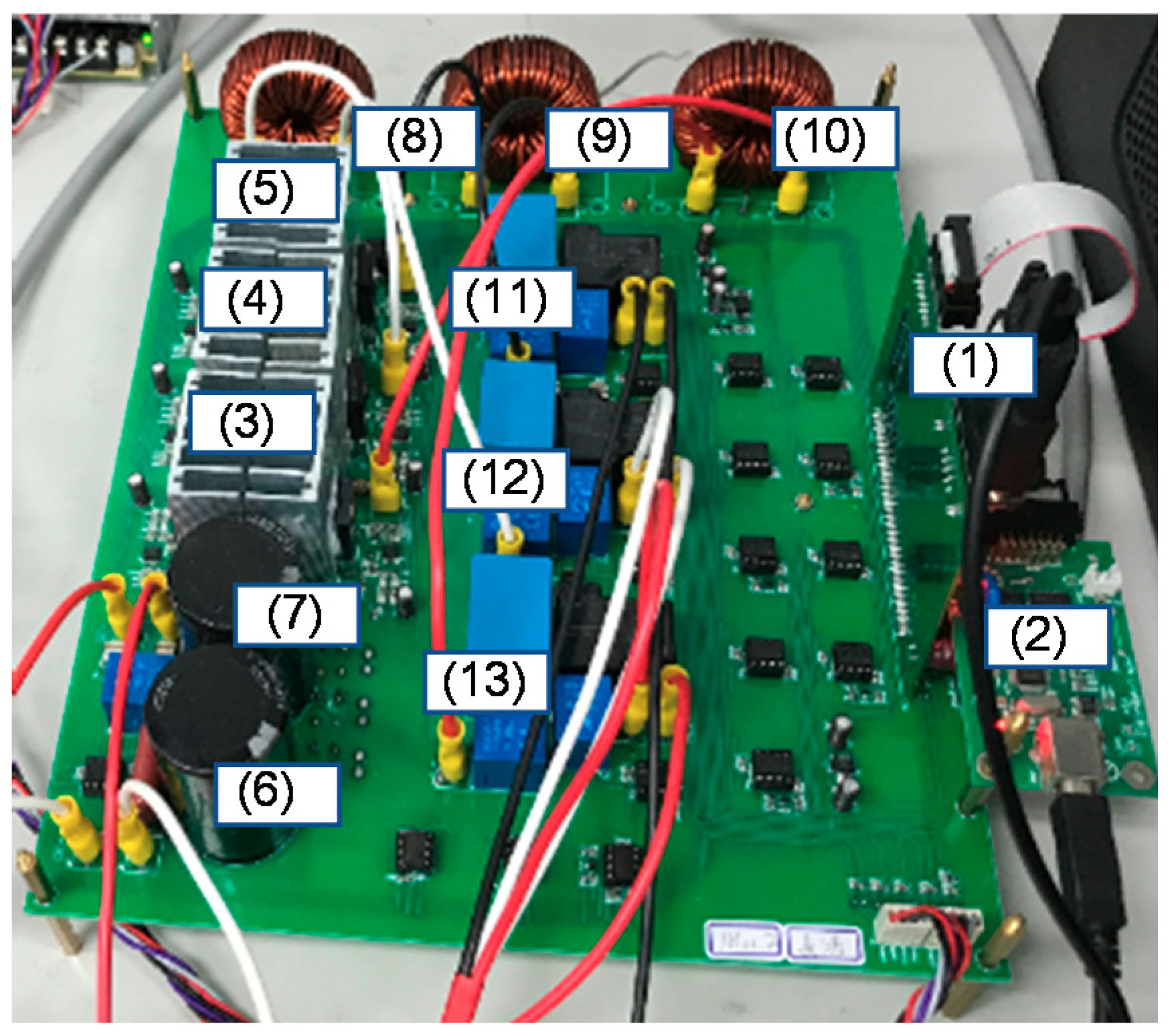
5. Hardware Prototype Implementation
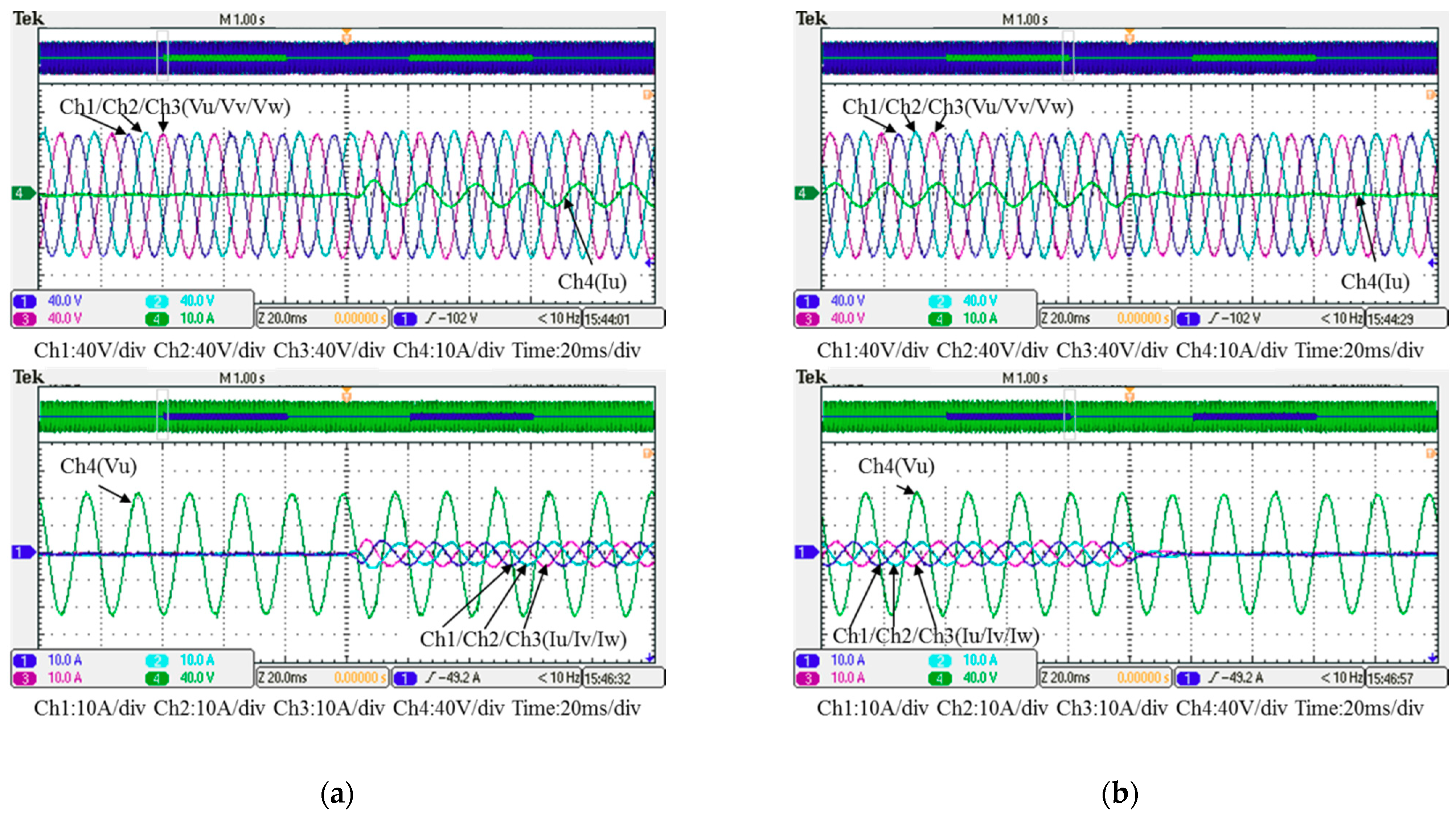
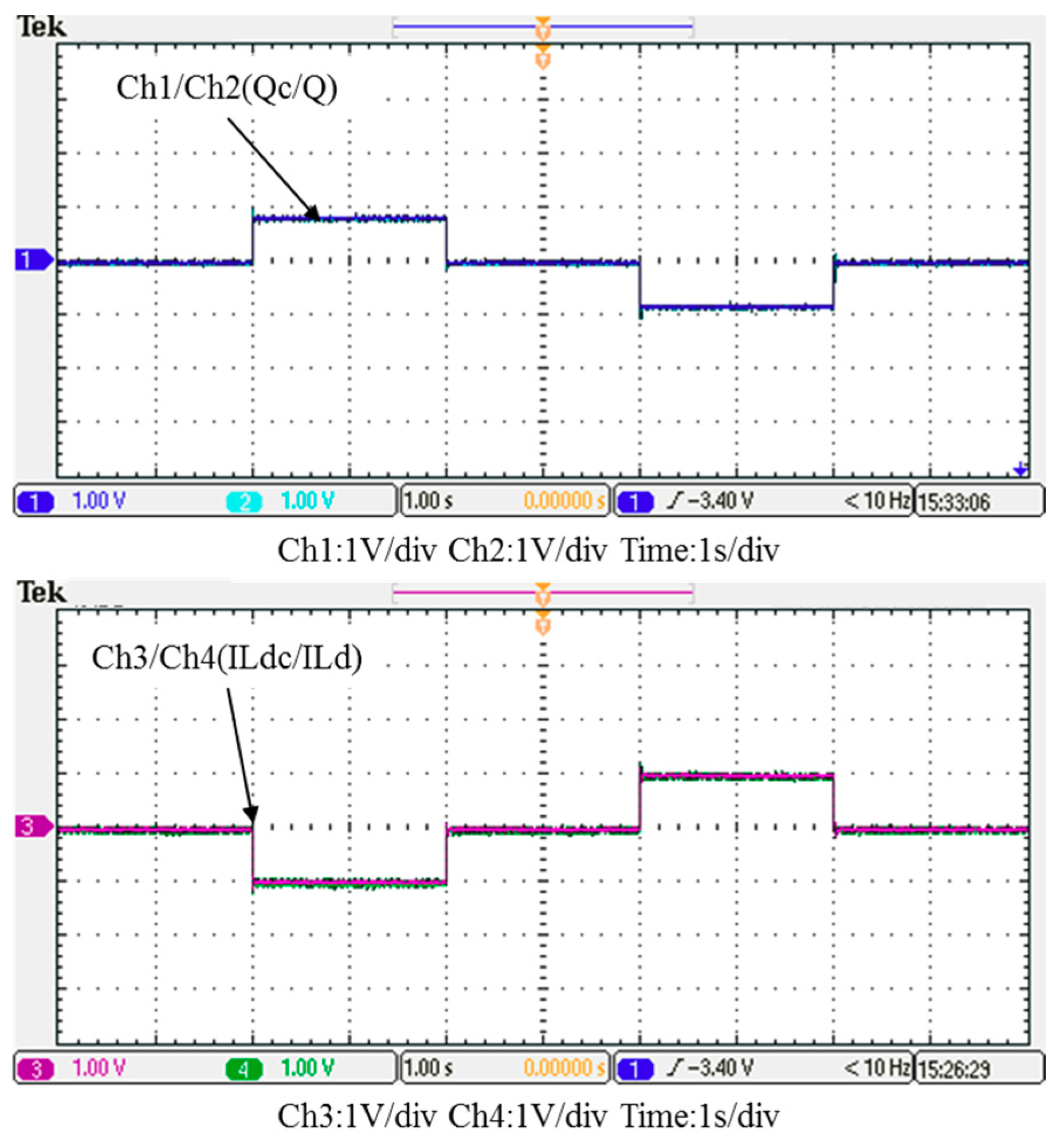
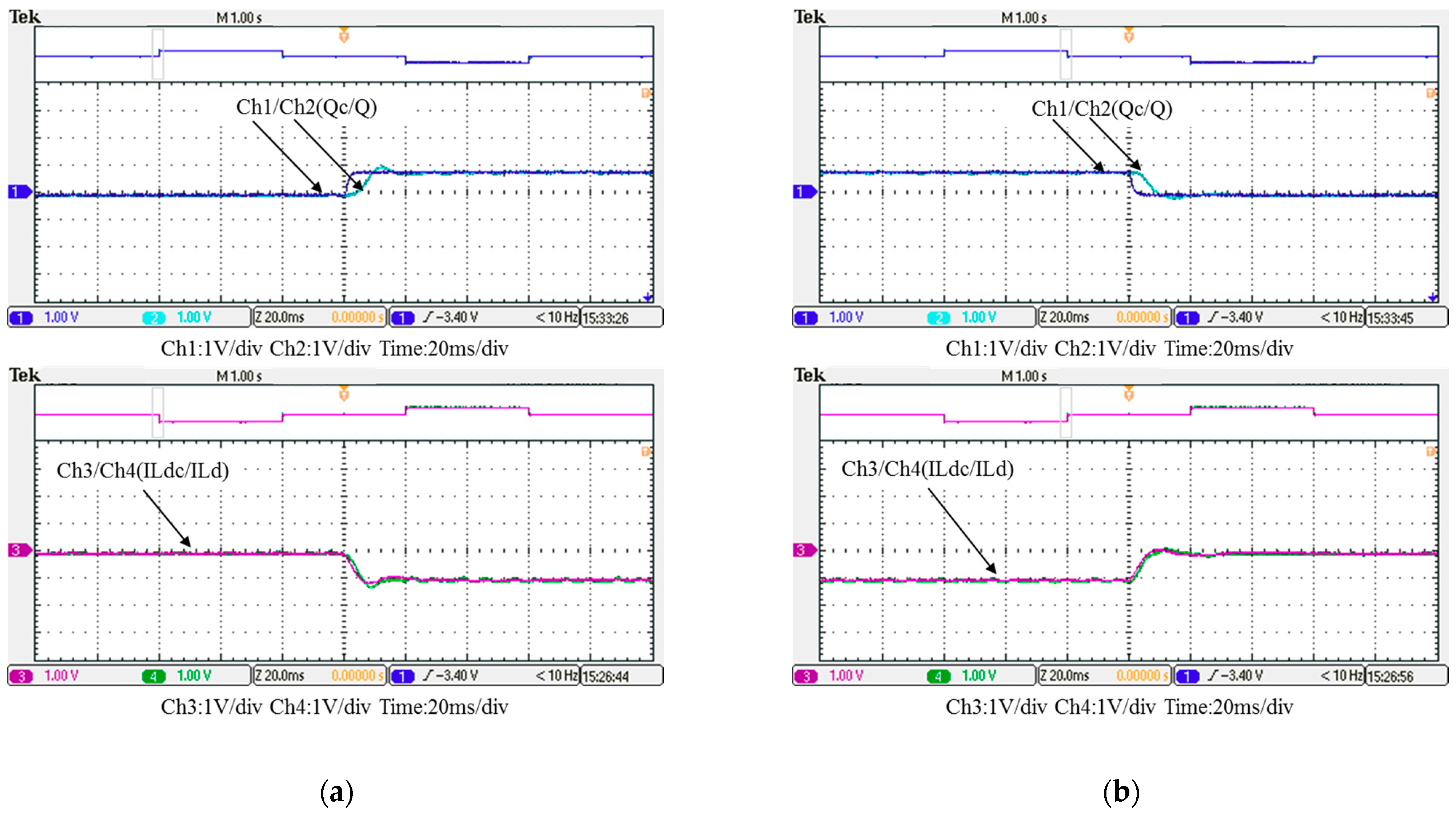
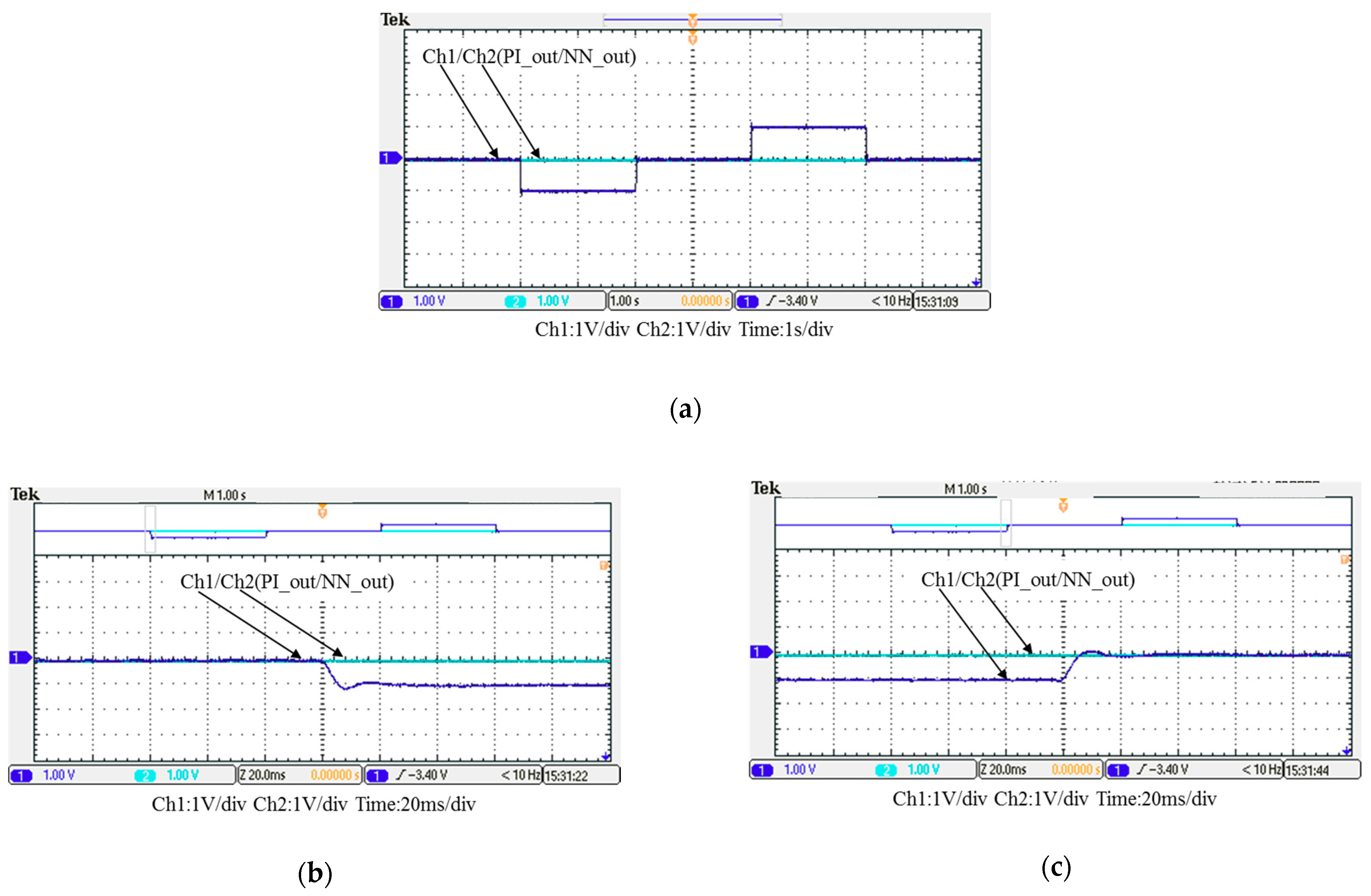
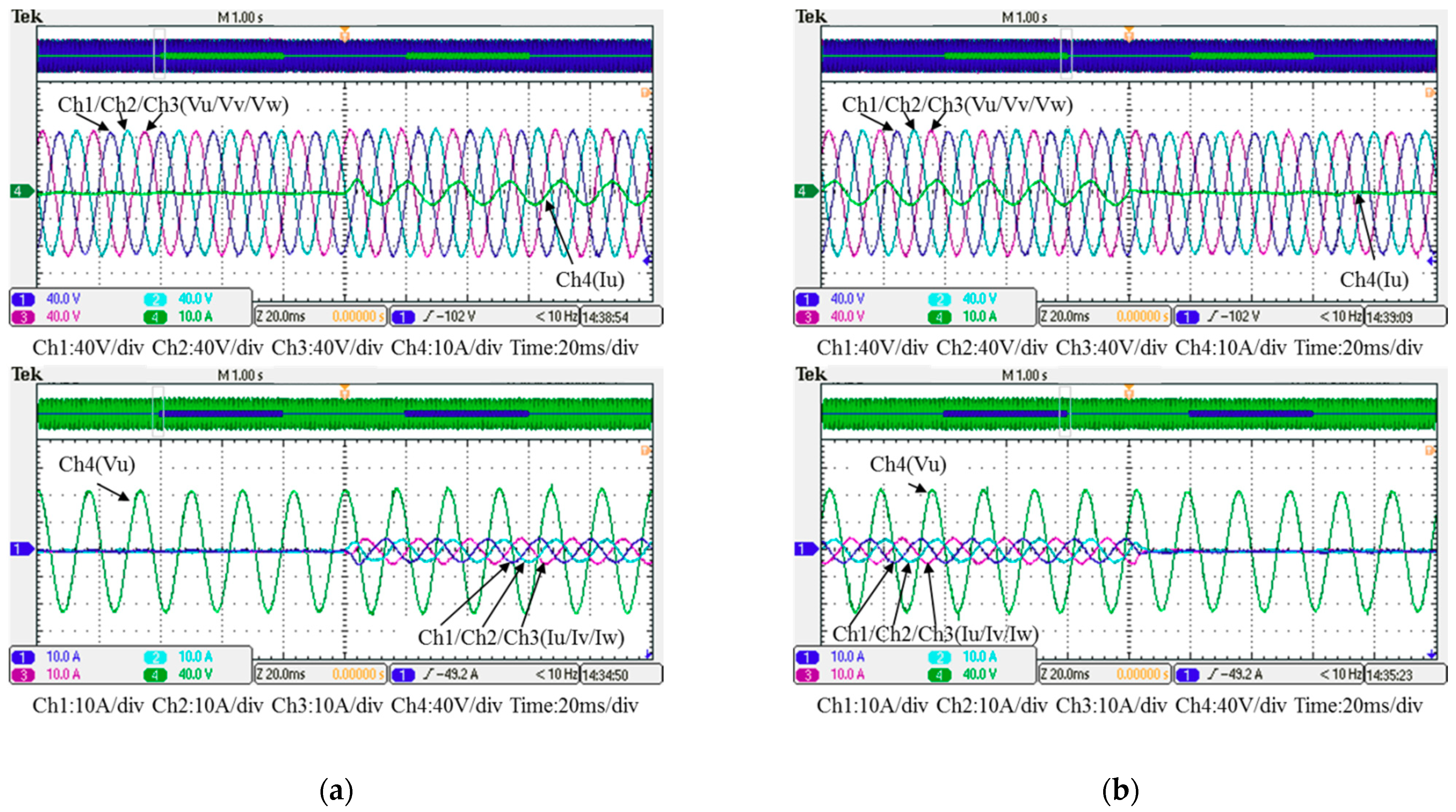
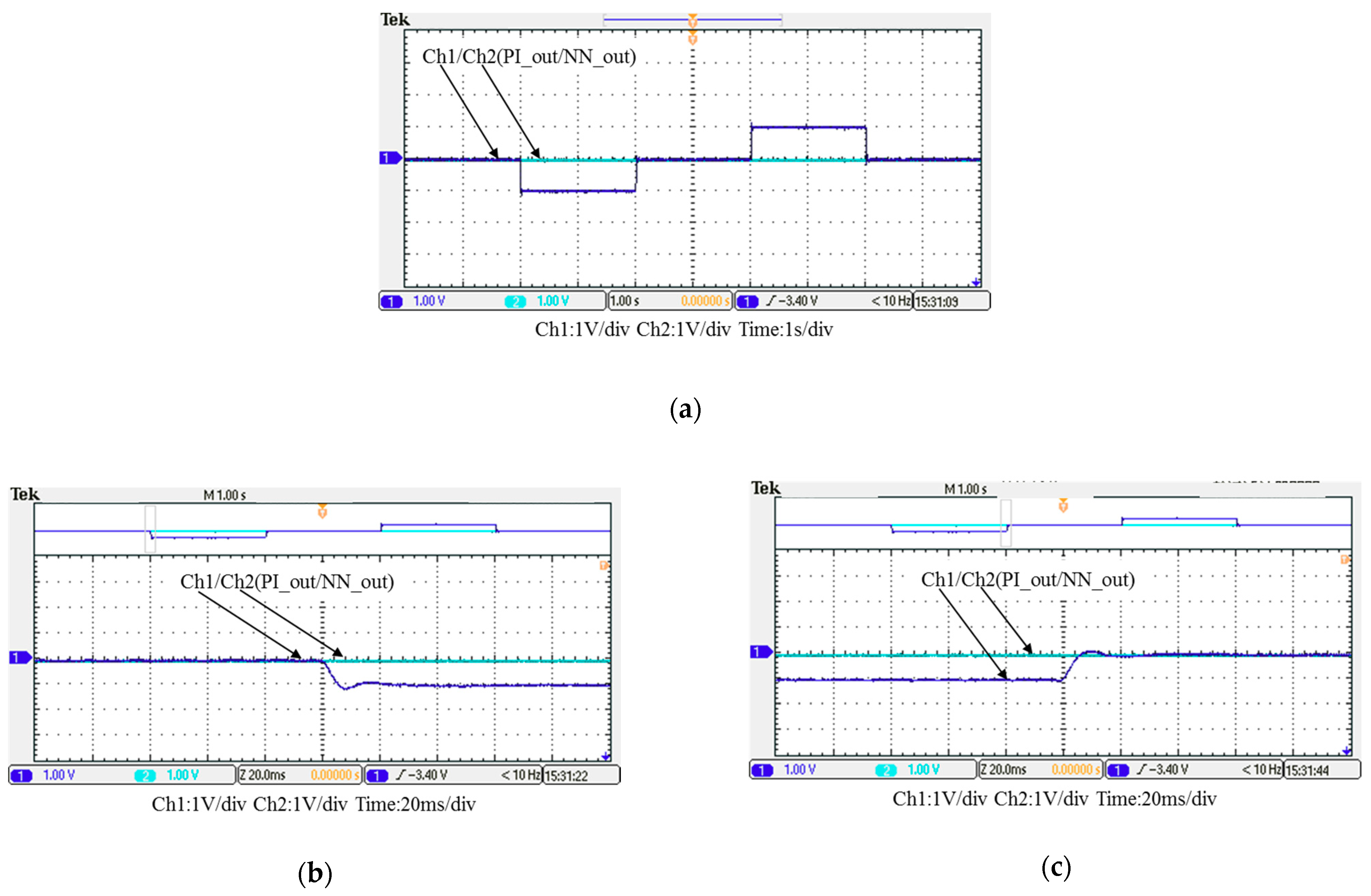
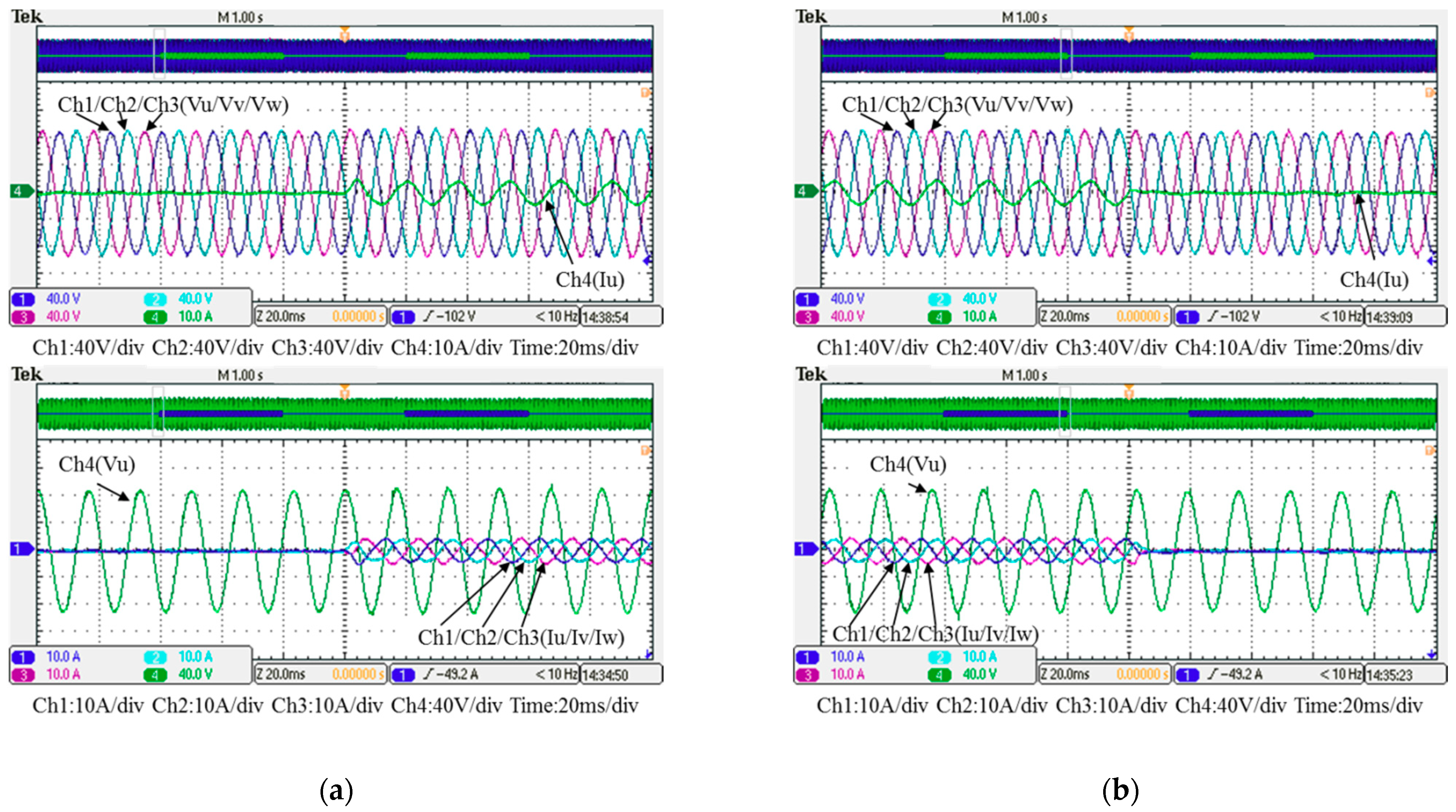
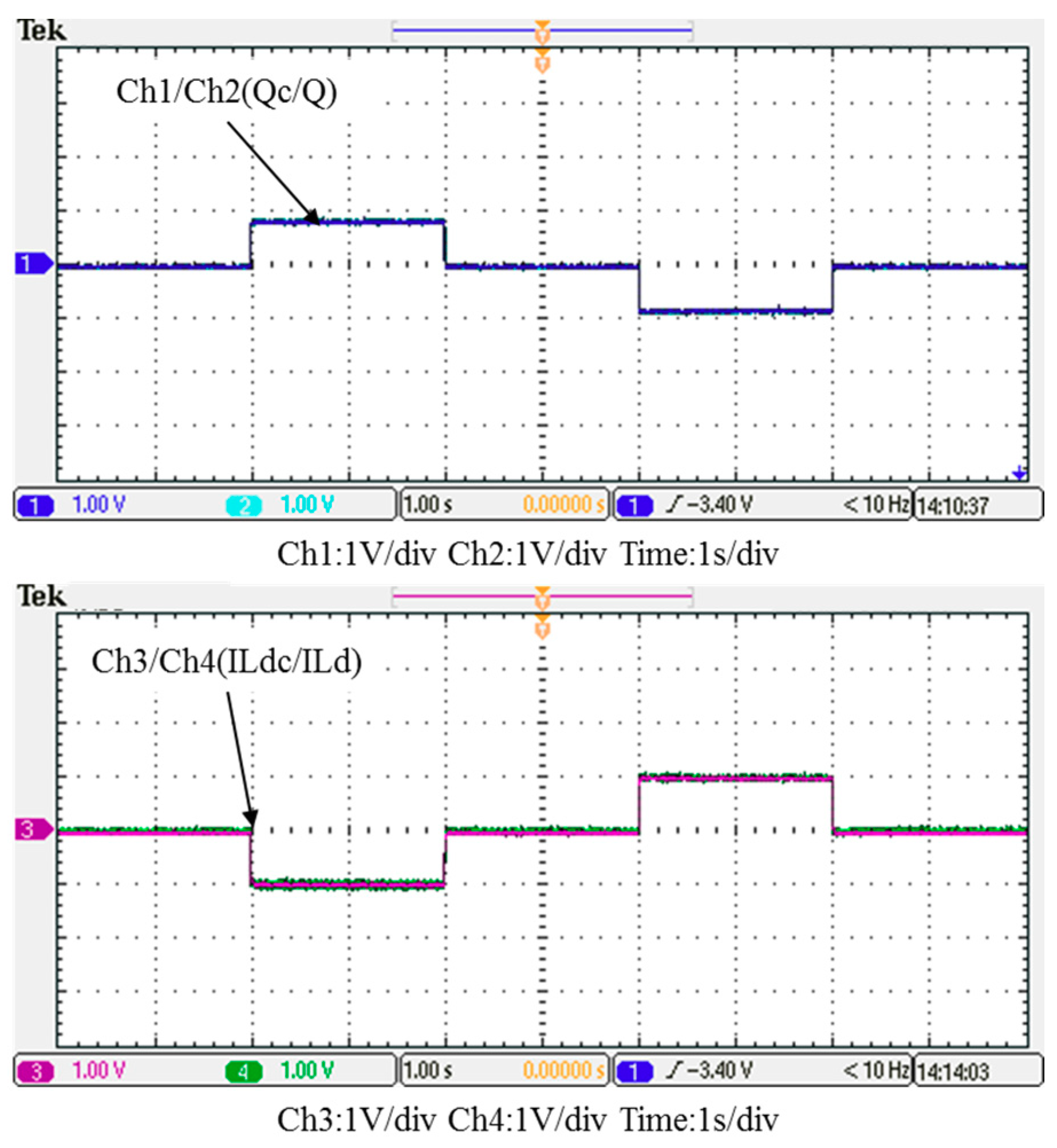
5.1. Test Results of Implementation Case 1: PI Controller
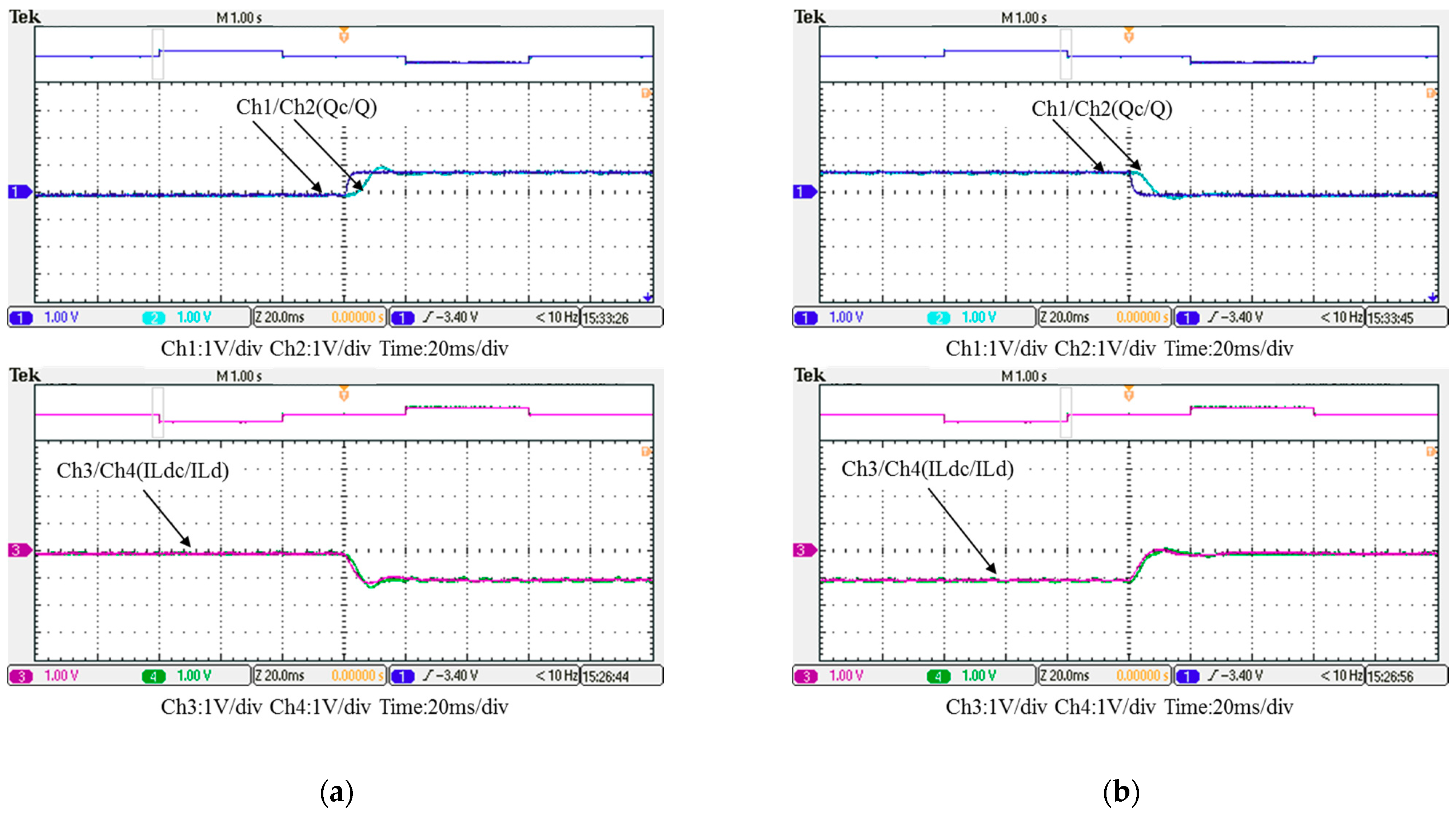
5.2. Test Results of Implementation Case 2: PI Controller + RBFNN Controller
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ma, Y.; Huang, A.; Zhou, X. A review of STATCOM on the electric power system. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015. [Google Scholar]
- Muñoz, J.; Rohten, J.; Espinoza, J.; Melín, P.; Baier, C.; Rivera, M. Review of current control techniques for a cascaded H-Bridge STATCOM. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015. [Google Scholar]
- Nikam, D.S.; Kalkhambkar, V.N. STATCOM and Multilevel VSC Topology: A Review. In Proceedings of the 2018 International Conference on Current Trends towards Converging Technologies (ICCTCT), Coimbatore, India, 1–3 March 2018. [Google Scholar]
- Shinde, O.K.; Pulavarthi, V.R.S.V.B. STATCOM converters and control: A review. In Proceedings of the 2017 International Conference on Data Management, Analytics and Innovation (ICDMAI), Pune, India, 24–26 February 2017. [Google Scholar]
- Elserougi, A.A.; Massoud, A.M.; Ahmed, S. A transformerless STATCOM based on a hybrid Boost Modular Multilevel Converter with reduced number of switches. Electr. Pow. Syst. Res. 2017, 146, 341–348. [Google Scholar] [CrossRef]
- Pires, V.F.; Cordeiro, A.; Foito, D.; Silva, J.F. A STATCOM Based on a Three-Phase, Triple Inverter Modular Topology for Multilevel Operation. IEEE Trans. Power. Deliver. 2019, 34, 1988–1997. [Google Scholar] [CrossRef]
- Mehouachi, I.; Abbes, M.; Chebbi, S. Design of a high power D-STATCOM based on the isolated dual-converter topology. Int. J. Elec. Power. 2019, 106, 401–410. [Google Scholar] [CrossRef]
- Liu, J.; Su, C.; Wang, X.; Fang, W.; Niu, S.; Cheng, L. Abnormality in power system transient stability control of BESS/STATCOM. J. Eng. 2017, 2017, 1040–1044. [Google Scholar] [CrossRef]
- Hussain, I.; Kandpal, M.; Singh, B. Grid integration of single stage SPV-STATCOM using cascaded 7-level VSC. Int. J. Elec. Power. 2017, 93, 238–252. [Google Scholar] [CrossRef]
- Pezeshki, H.; Arefi, A.; Ledwich, G.; Wolfs, P. Probabilistic Voltage Management Using OLTC and dSTATCOM in Distribution Networks. IEEE Trans. Power. Deliver. 2018, 33, 570–580. [Google Scholar] [CrossRef]
- Wang, L.; Chang, C.; Kuan, B.; Prokhorov, A.V. Stability Improvement of a Two-Area Power System Connected With an Integrated Onshore and Offshore Wind Farm Using a STATCOM. IEEE Trans. Ind. Appl. 2017, 53, 867–877. [Google Scholar] [CrossRef]
- Satpathy, A.S.; Kastha, D.; Kishore, K. Control of a STATCOM-assisted self-excited induction generator-based WECS feeding non-linear three-phase and single-phase loads. IET Power Electron. 2019, 12, 829–839. [Google Scholar] [CrossRef]
- Wang, L.; Liu, W.S.; Yeh, C.C.; Yu, C.H.; Lu, X.Y.; Kuan, B.L.; Wu, H.Y.; Prokhorov, A.V. Reduction of Three-Phase Voltage Unbalance Subject to Special Winding Connections of Two Single-Phase Distribution Transformers of a Microgrid System Using a Designed D-STATCOM Controller. IEEE Trans. Ind. Appl. 2018, 54, 2002–2011. [Google Scholar] [CrossRef]
- Ma Packaging Technologies: Challenges, Advances, and Emerging Issues. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 239–255. [CrossRef]
- Sheng, H.; Chen, Z.; Wang, F.; Millner, A. Investigation of 1.2 kV SiC MOSFET for high frequency high power applications. Proceedings of 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010. [Google Scholar]
- Jones, E.A.; Wang, F.F.; Costinett, D. Review of Commercial GaN Power Devices and GaN-Based Converter Design Challenges. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 707–719. [Google Scholar] [CrossRef]
- Spaziani, L.; Lu, L. Silicon, GaN and SiC: There’s room for all: An application space overview of device considerations. In Proceedings of the 2018 IEEE 30th International Symposium on Power Semiconductor Devices and ICs (ISPSD), Chicago, IL, USA, 13–17 May 2018. [Google Scholar]
- Viswan, V. A review of silicon carbide and gallium nitride power semiconductor devices. IJRESM 2018, 1, 224–225. [Google Scholar]
- Bosshard, T.R.; Kolar, J.W. Performance comparison of a GaN GIT and a Si IGBT for high-speed drive applications. Proceedings of 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014. [Google Scholar]
- High-Performance SiC MOSFET Technology for Power Electronics Design. Available online: https://www.eeweb.com/profile/eeweb/articles/high-performance-coolsic-mosfet-technology-for-power-electronics-design (accessed on 13 April 2020).
- Adappa, R.; Suryanarayana, K.; Swathi Hatwar, H.; Ravikiran Rao, M. Review of SiC based Power Semiconductor Devices and their Applications. In Proceedings of the 2019 2nd International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kannur, Kerala, India, 5–6 July 2019. [Google Scholar]
- Papers, Articles and Presentations. Available online: https://gansystems.com/design-center/papers/ (accessed on 31 March 2020).
- Observations about the Impact of GaN Technology. Available online: https://www.powerelectronicsnews.com (accessed on 31 March 2020).
- Use SiC and GaN Power Components to Address EV Design Requirements. Available online: https://www.digikey.tw/en/articles/use-sic-and-gan-power-components-ev-design-requirements (accessed on 13 April 2020).
- Application Notes. Available online: https://gansystems.com/design-center/application-notes/ (accessed on 14 April 2020).
- IGBT & SiC Gate Driver Fundamentals. Available online: https://www.ti.com/lit/wp/slyy169/slyy169.pdf?ts=1594784799613&ref_url=https%253A%252F%252Fwww.google.com%252F (accessed on 22 April 2020).
- Jyotheeswara Reddy, K.; Sudhakar, N. High Voltage Gain Interleaved Boost Converter With Neural Network Based MPPT Controller for Fuel Cell Based Electric Vehicle Applications. IEEE Access 2018, 6, 3899–3908. [Google Scholar] [CrossRef]
- Liang, Z.; Kang, C.; Shengbin, C.; Ling, L.; Huanhuan, M.; Kaiwen, W. The Bidirectional DC/DC Converter Operation Mode Control Algorithm Based on RBF Neural Network. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019. [Google Scholar]
- Yin, Y.; Liu, J.; Sánchez, J.A.; Wu, L.; Vazquez, S.; Leon, J.I.; Franquelo, L.G. Observer-Based Adaptive Sliding Mode Control of NPC Converters: An RBF Neural Network Approach. IEEE Trans. Power Electr. 2019, 34, 3831–3841. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Grid voltage, | 63.5 Vrms |
| Grid frequency | 60 Hz |
| Inverter capacity | 2 kVA |
| DC link voltage, | 200 V |
| DC link capacitor, | 1360 μF/400 V |
| Filter inductor, | 1 mH |
| Filter capacitor, | 10 μF |
| DC voltage variation limit | 1% |
| Switching frequency | 100 kHz |
| Carrier amplitude | 5 V |
| DC voltage sensing factor, | 0.012 |
| AC voltage sensing factor, | 0.0062 |
| AC current sensing factor, | 0.05 |
| Case | RBFNN Controller |
|---|---|
| 1 | Inactivated |
| 2 | Activated |
| Item | Sensing Factor | Equivalent Value |
|---|---|---|
| Reactive power & Reactive power controller output | ks ∗ kv (0.00031) | 1 V→3225.8 VAR |
| Inductor current | ks (0.05) | 1 V→20 A |
| Item | Value/Part Number |
|---|---|
| DSP | TMS320F28335 |
| Load | 20 Ω per phase |
| Delta-Y three-phase transformer | 200 V/146 V |
| GaN HEMT | TPH3207 |
| Gate driver | Si8271 |
| Grid voltage, vgrid_abc | 63.5 Vrms |
| Grid frequency | 60 Hz |
| Inverter capacity | 2 kVA |
| DC link voltage, Vdc | 200 V |
| DC voltage sensing factor, kvd | 0.012 |
| AC voltage sensing factor, kv | 0.0062 |
| AC current sensing factor, ks | 0.05 |
| Number | Device | Value/Part Number |
|---|---|---|
| (1) | DSP | TMS320F28335 |
| (2) | DSP interface | N/A |
| (3)–(5) | GaN HEMT pairs | TPH3207 |
| (6) & (7) | DC link capacitors | 680 μF/400 V |
| (8)–(10) | Filter inductors | 1 mH |
| (11)–(13) | Filter capacitors | 10 μF/300 V |
| Case | Controllers | Rise time (ms) | Fall time (ms) | Overshoot (%) | Undershoot (%) | ||||
|---|---|---|---|---|---|---|---|---|---|
| Sim. | Imp. | Sim. | Imp. | Sim. | Imp. | Sim. | Imp. | ||
| 1 | PI | 3.469 | 4.3 | 3.558 | 4.68 | 20 | 24 | 20 | 14 |
| 2 | PI + NN | 3.2 | 3.52 | 3.5 | 4.64 | 5 | 4 | 6 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, C.-T.; Gu, Z.-H. Investigation on GaN HEMTs Based Three-Phase STATCOM with Hybrid Control Scheme. Micromachines 2021, 12, 464. https://doi.org/10.3390/mi12040464
Ma C-T, Gu Z-H. Investigation on GaN HEMTs Based Three-Phase STATCOM with Hybrid Control Scheme. Micromachines. 2021; 12(4):464. https://doi.org/10.3390/mi12040464
Chicago/Turabian StyleMa, Chao-Tsung, and Zhen-Huang Gu. 2021. "Investigation on GaN HEMTs Based Three-Phase STATCOM with Hybrid Control Scheme" Micromachines 12, no. 4: 464. https://doi.org/10.3390/mi12040464
APA StyleMa, C.-T., & Gu, Z.-H. (2021). Investigation on GaN HEMTs Based Three-Phase STATCOM with Hybrid Control Scheme. Micromachines, 12(4), 464. https://doi.org/10.3390/mi12040464