
Theoretical and Experimental Investigations into a Crawling Robot Propelled by Piezoelectric Material

 , ,
, ,
Abstract
:1. Introduction
2. Modelling and Theoretical Analysis
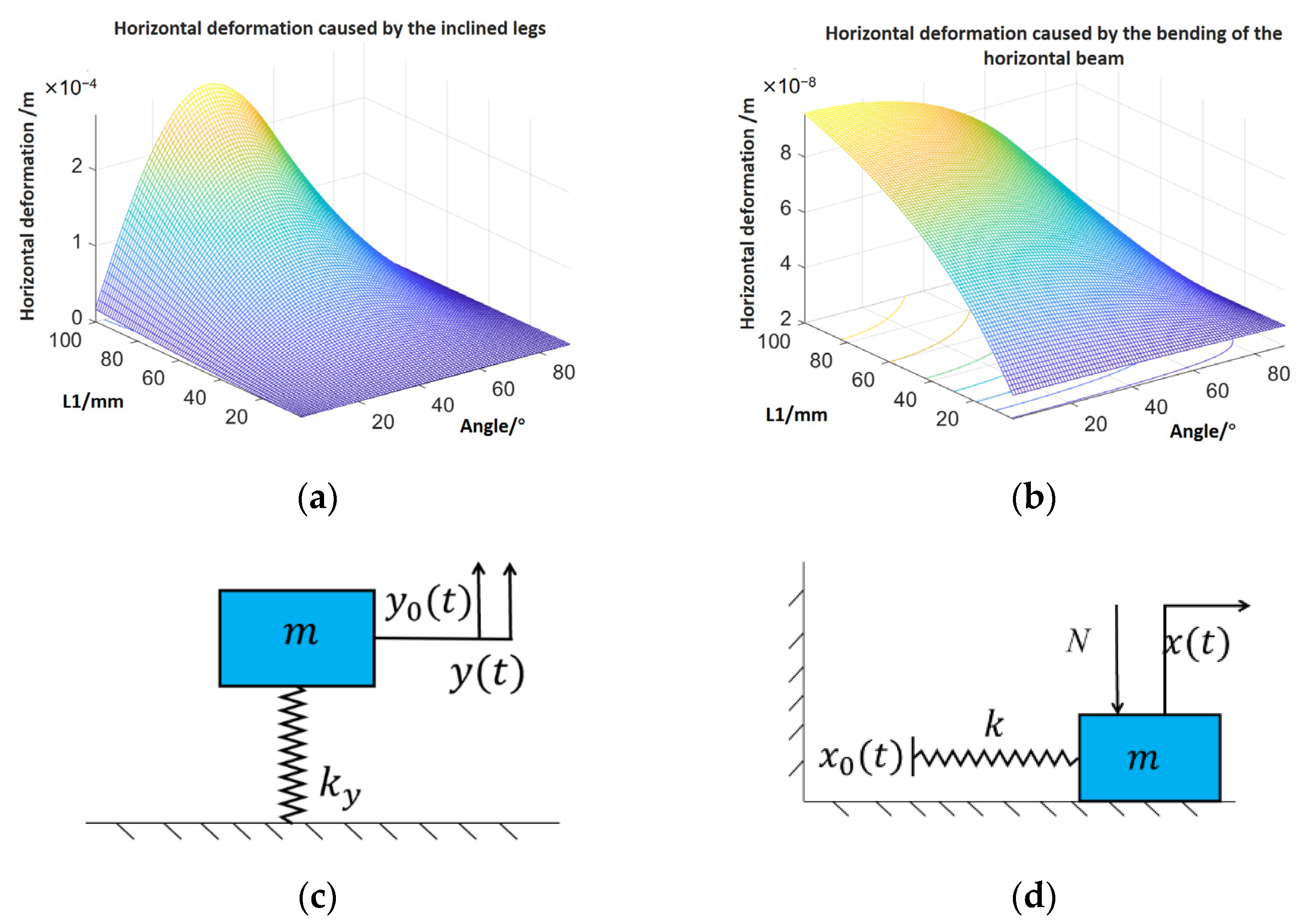
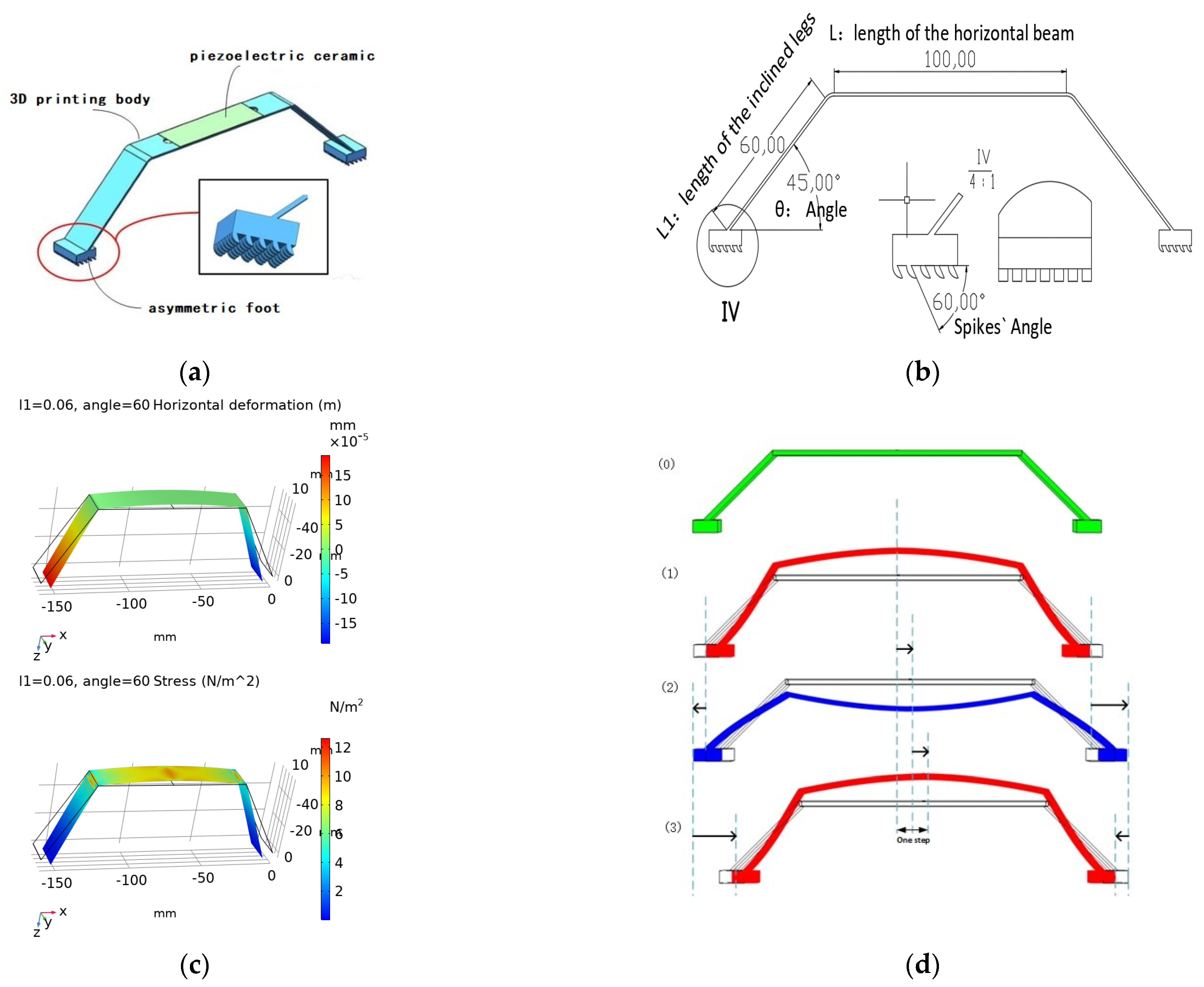
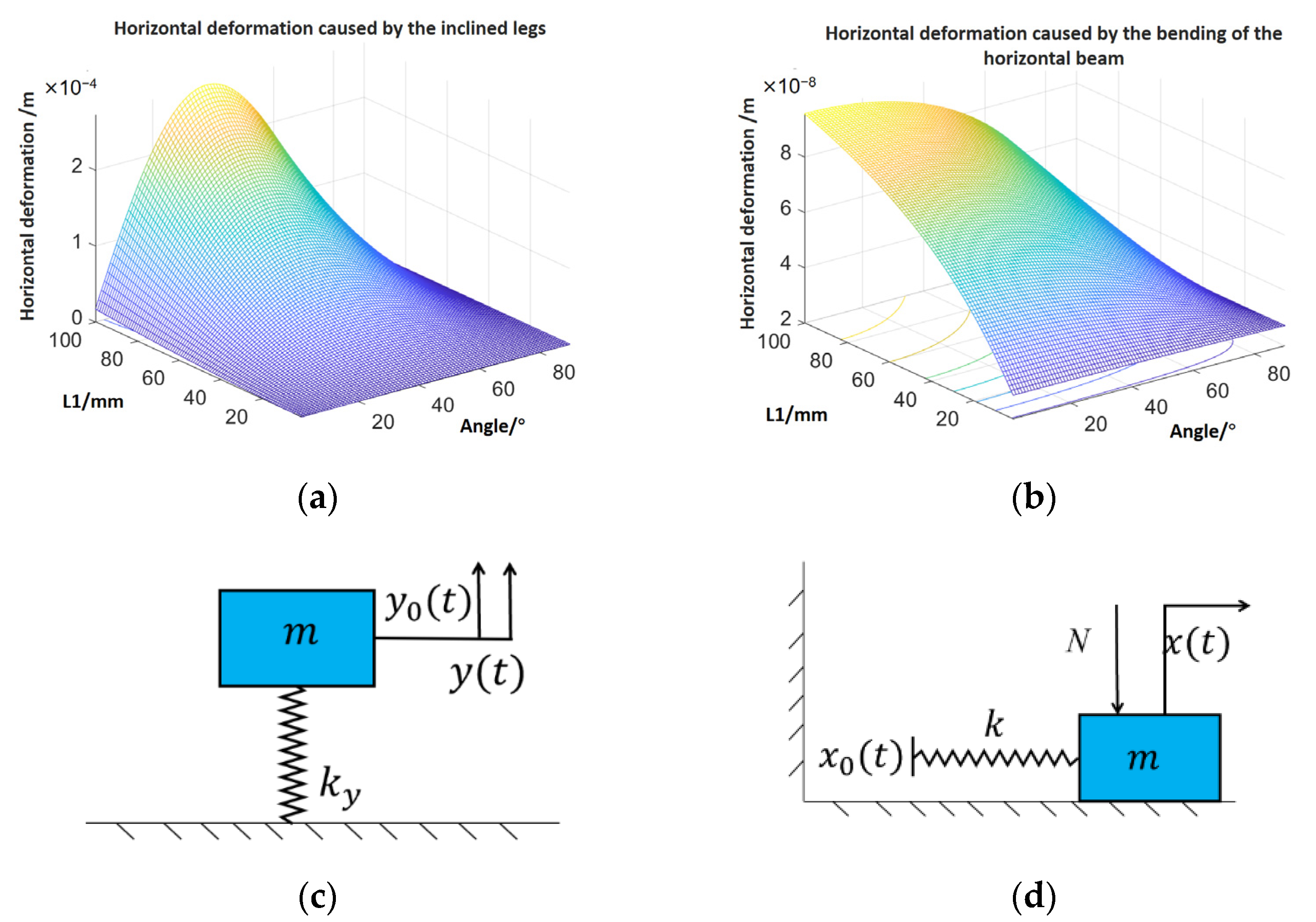
2.1. Modelling
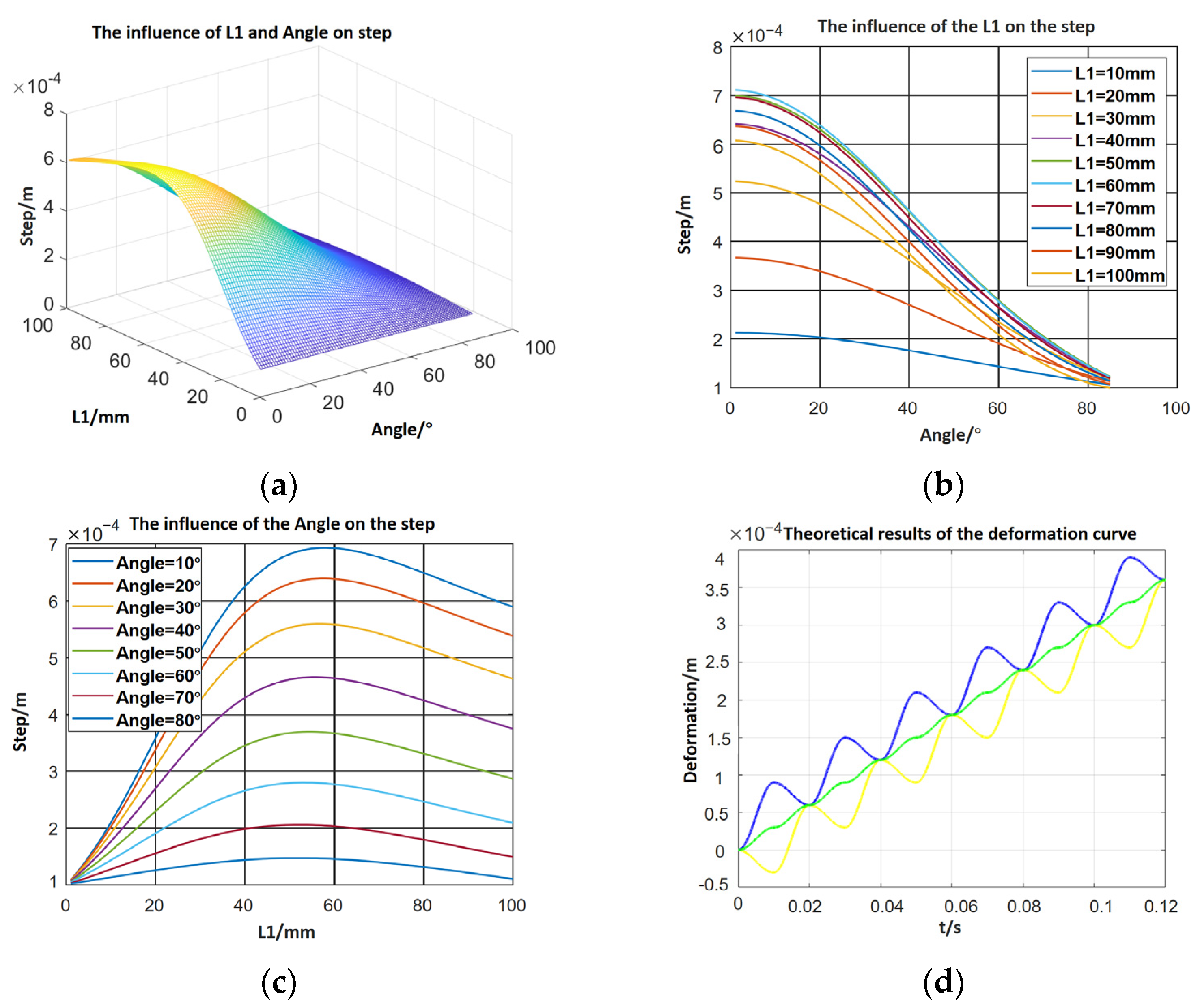
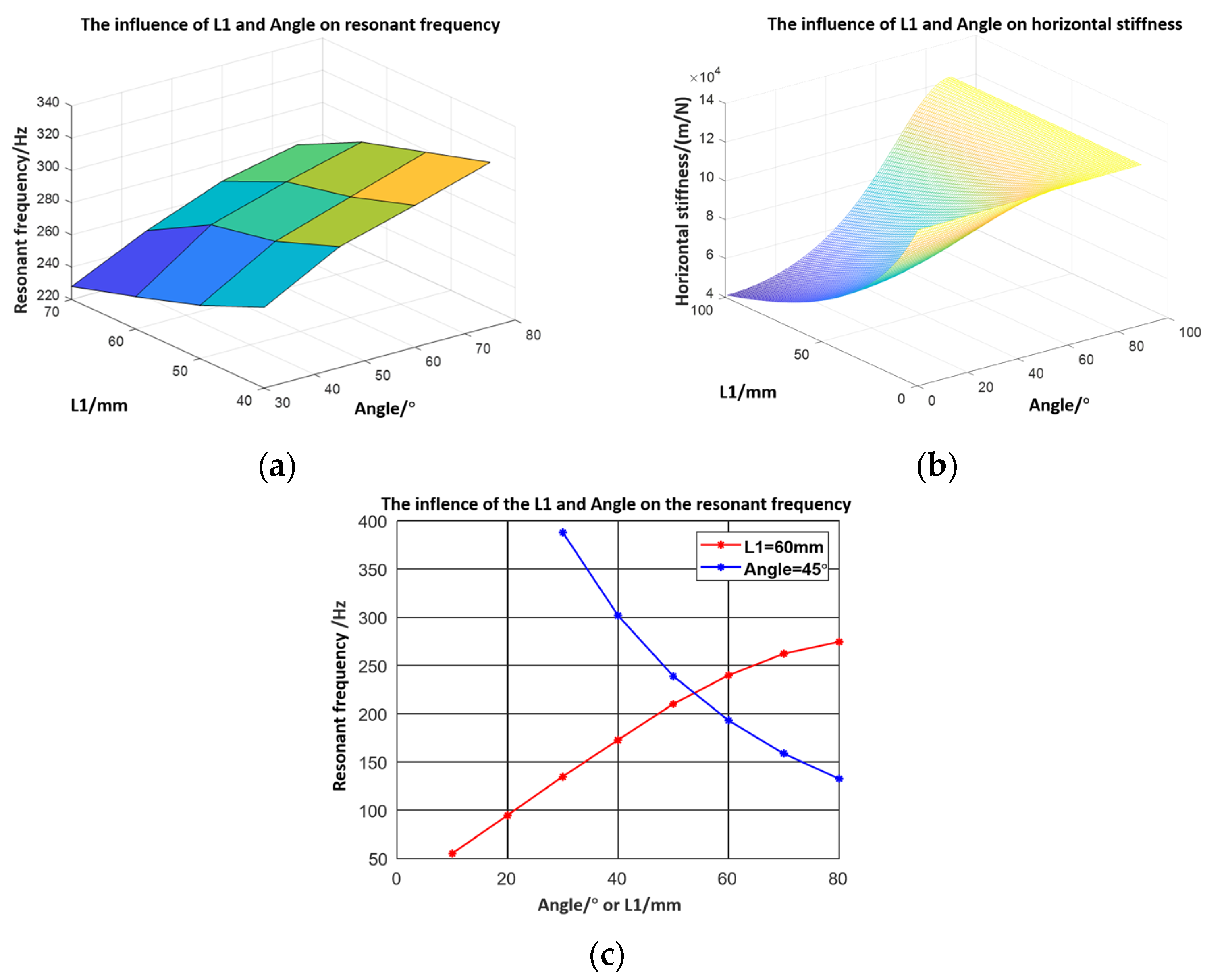
2.2. Theoretical Analysis
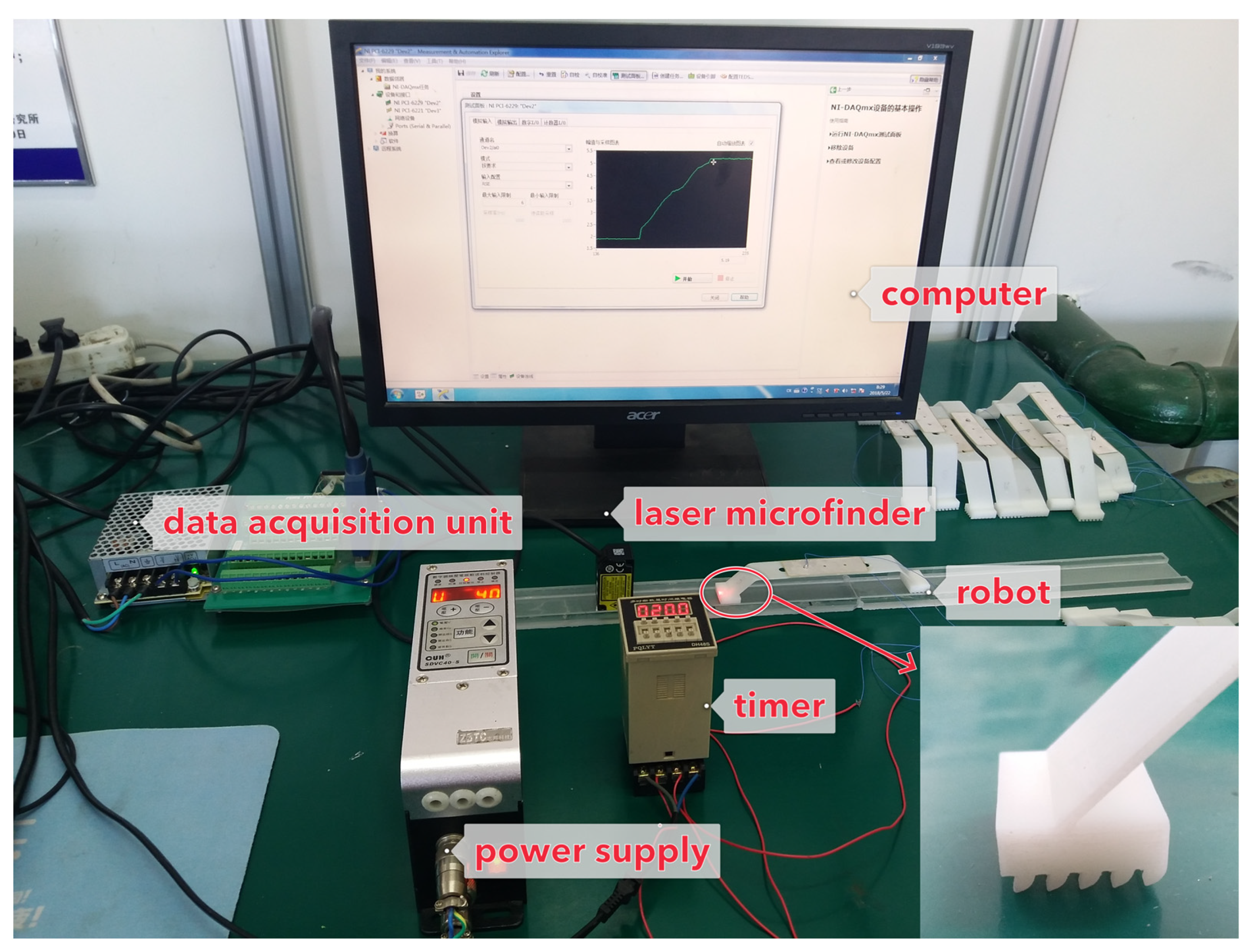
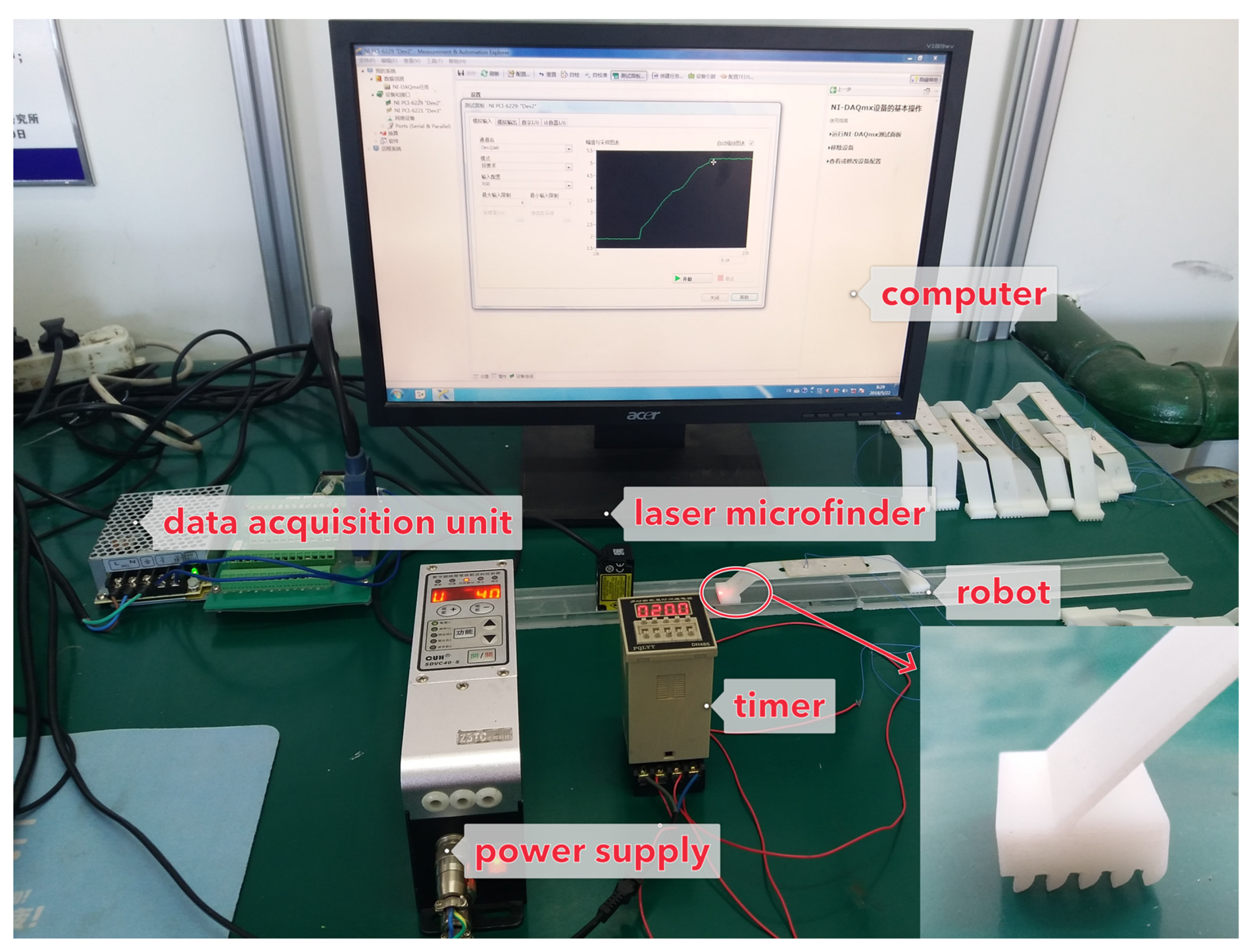
3. Experimental Analysis and Discussion
3.1. Experimental Analysis
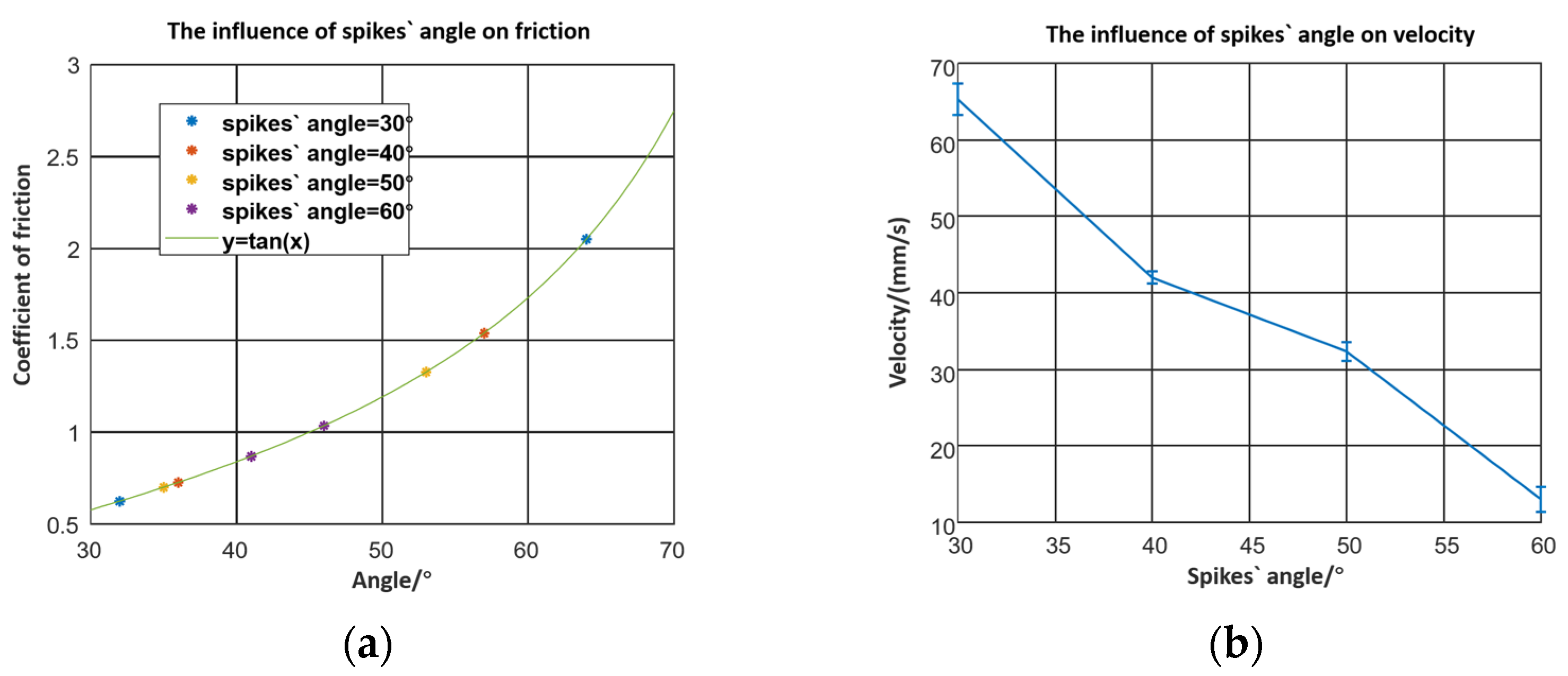
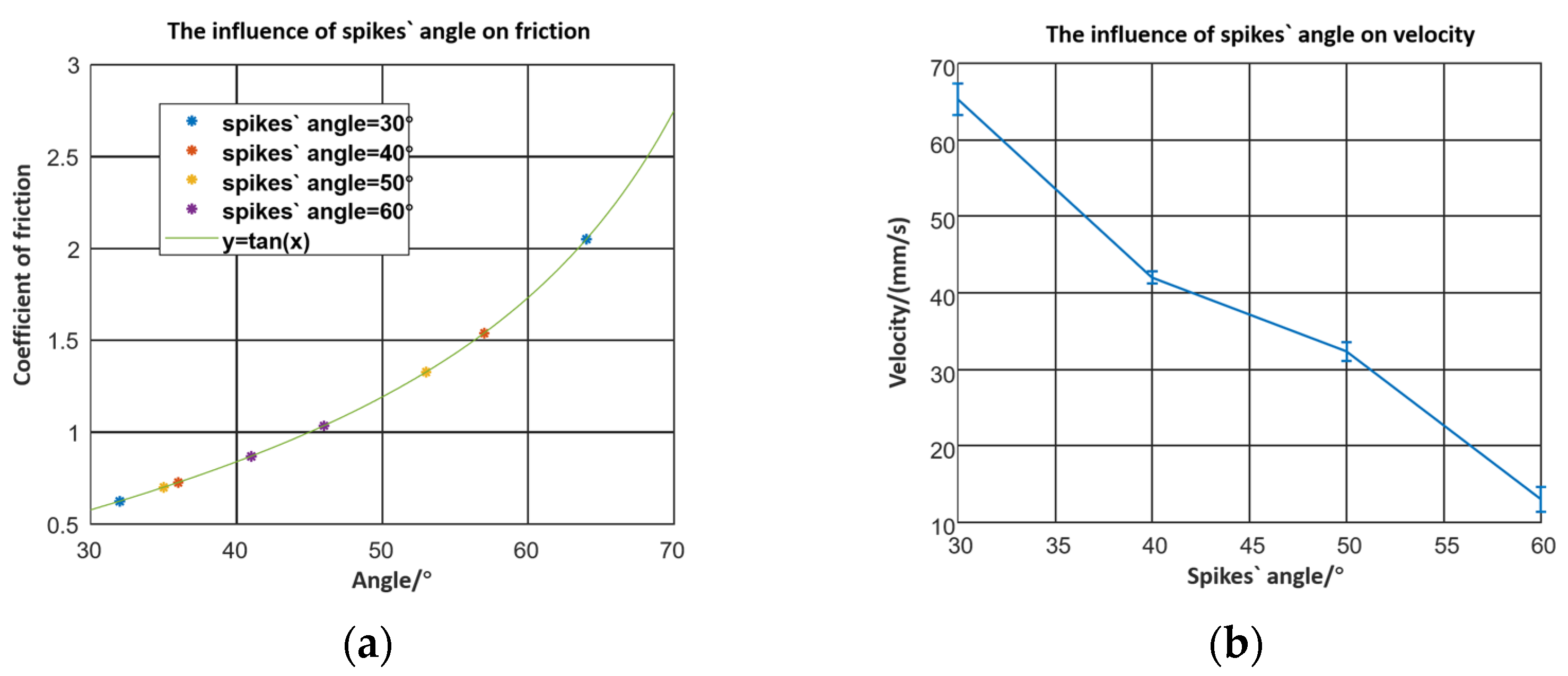
3.1.1. The Influence of the Microstructure on Feet
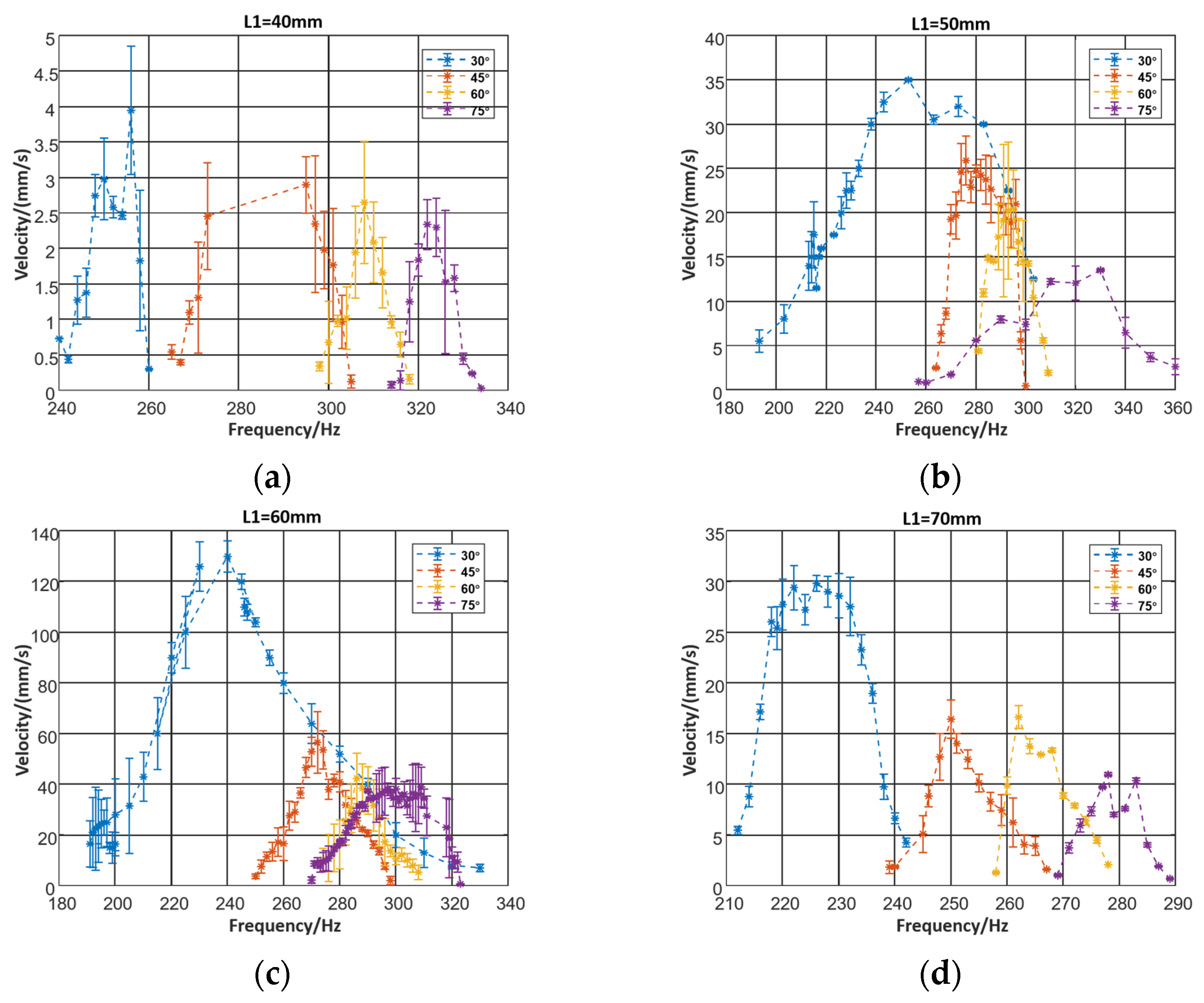
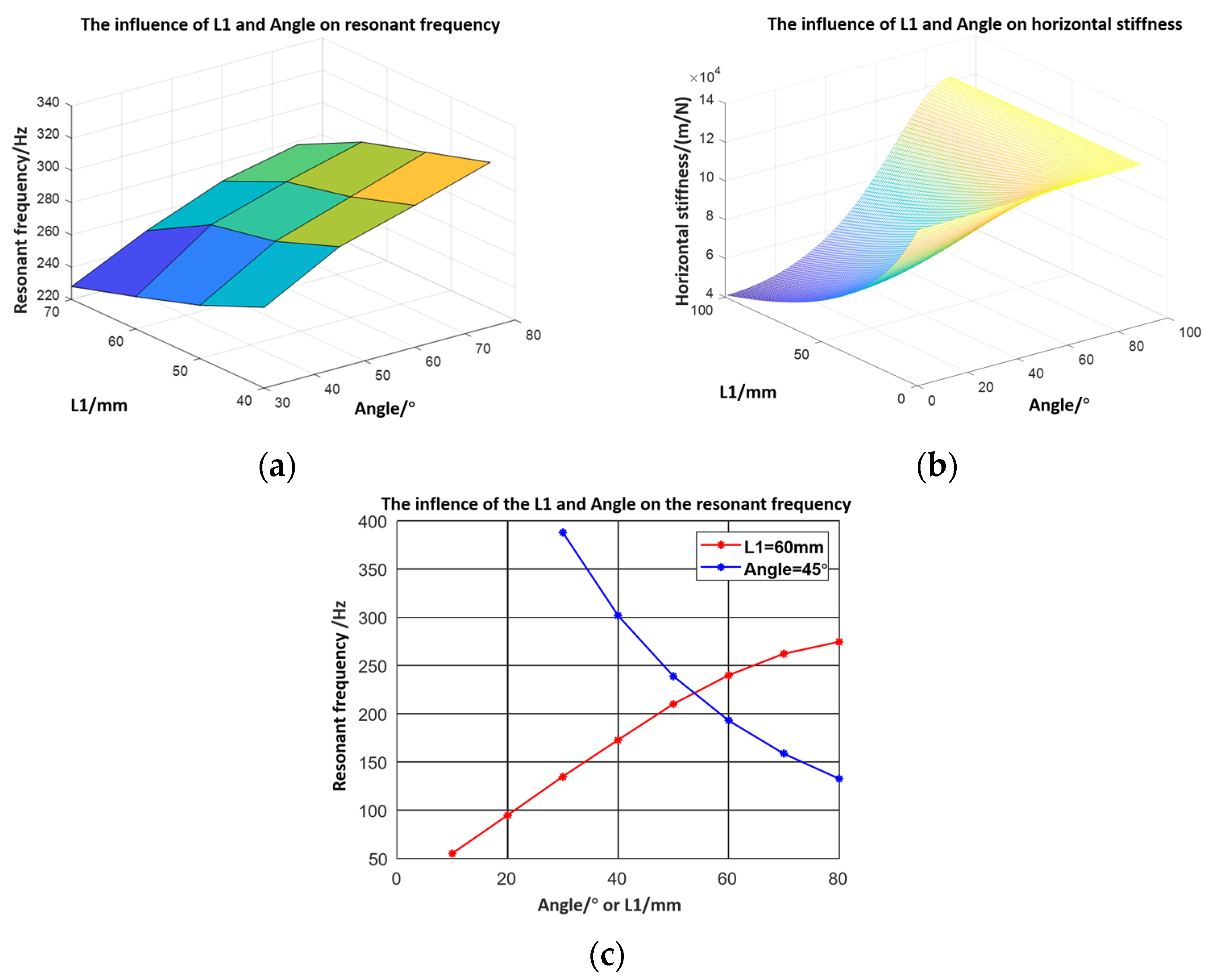
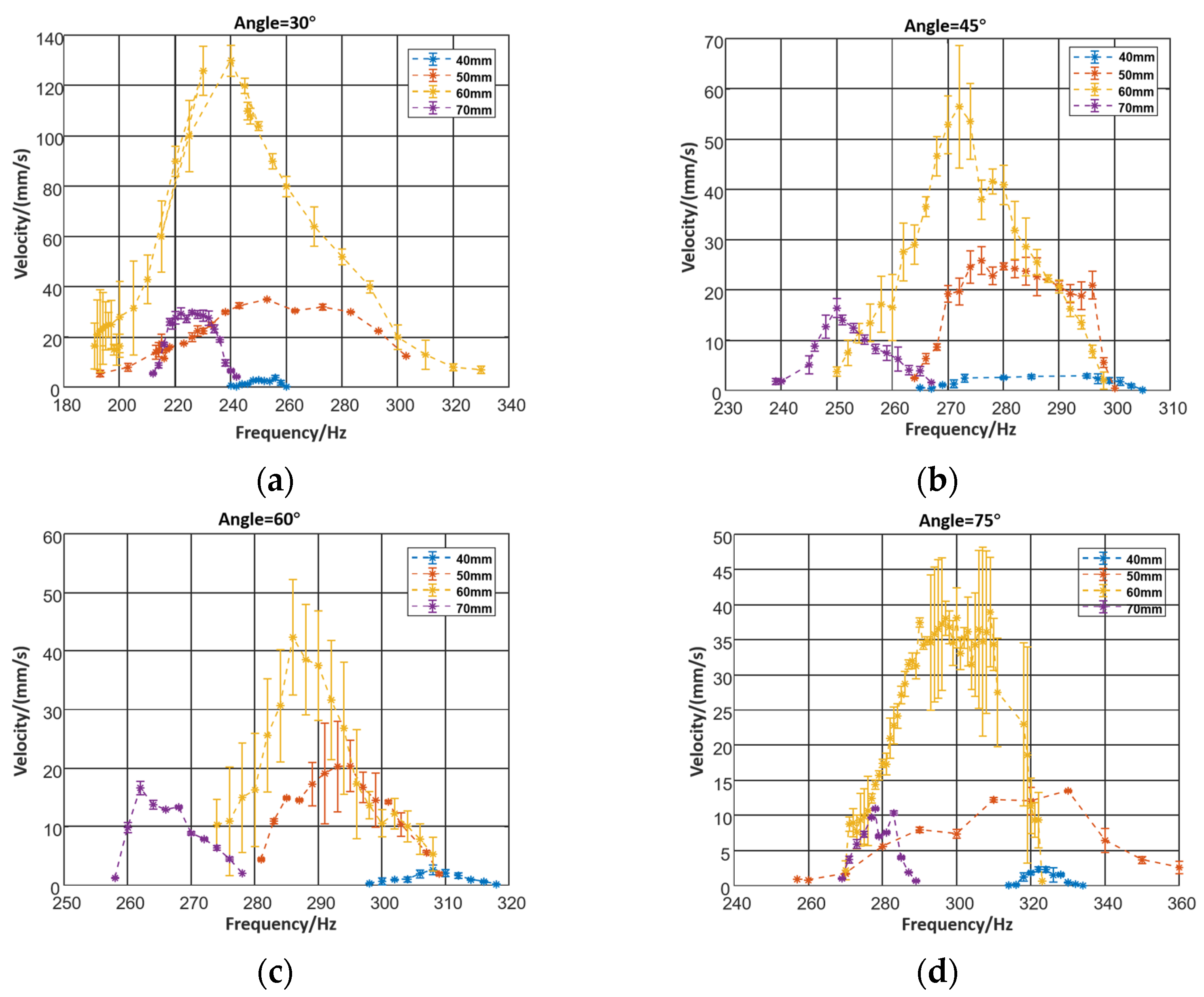
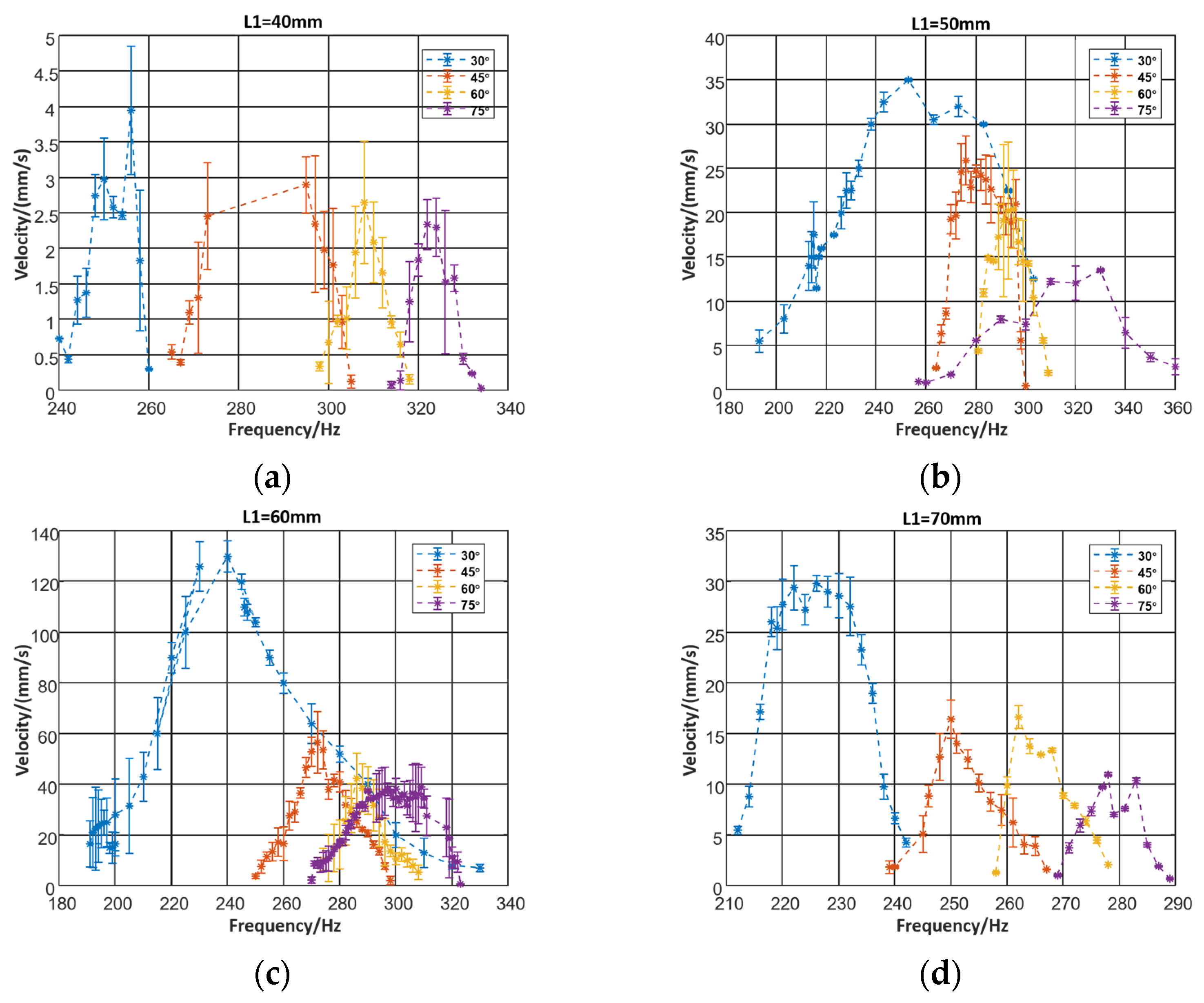
3.1.2. The Influence of the Structural Parameters
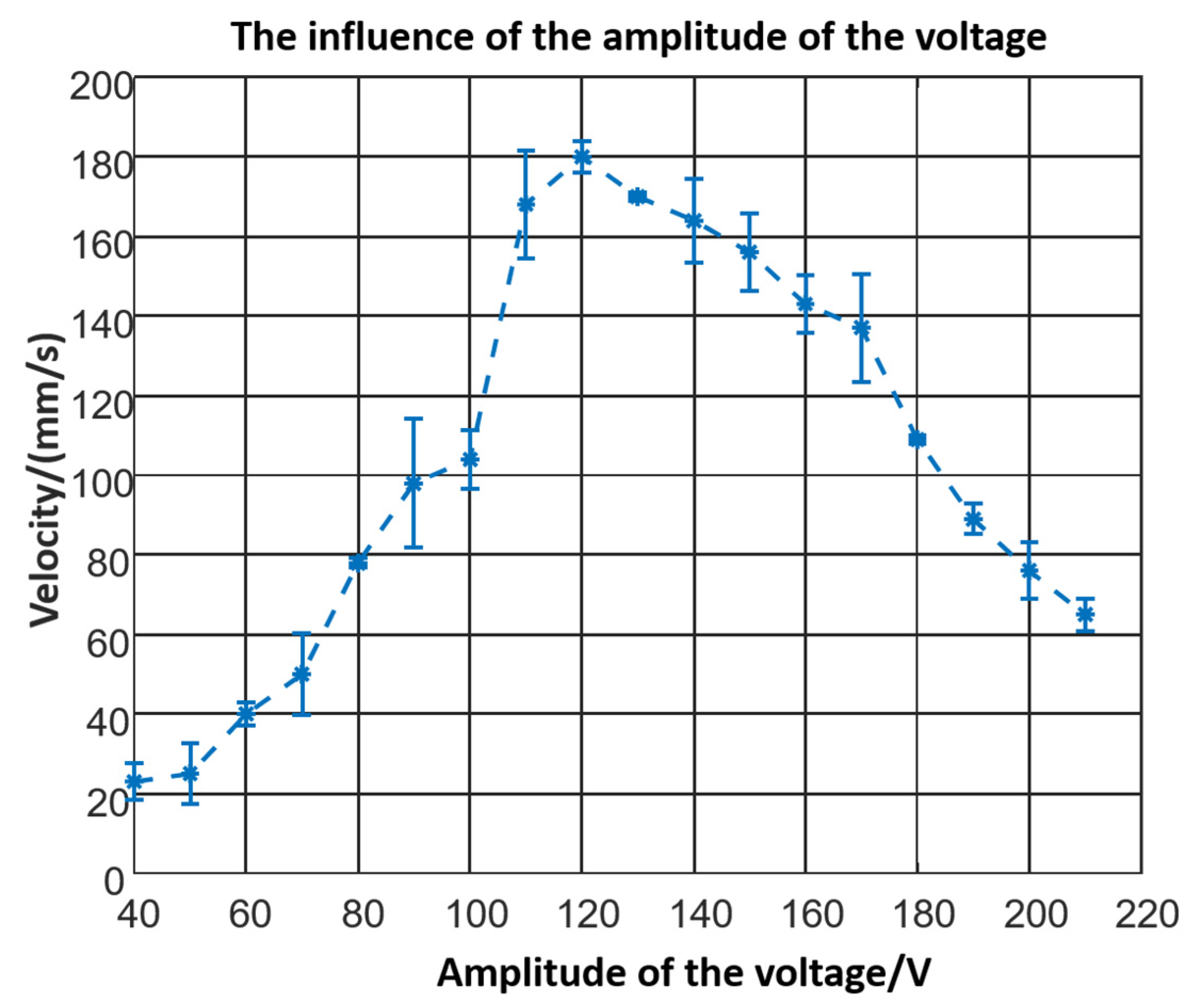
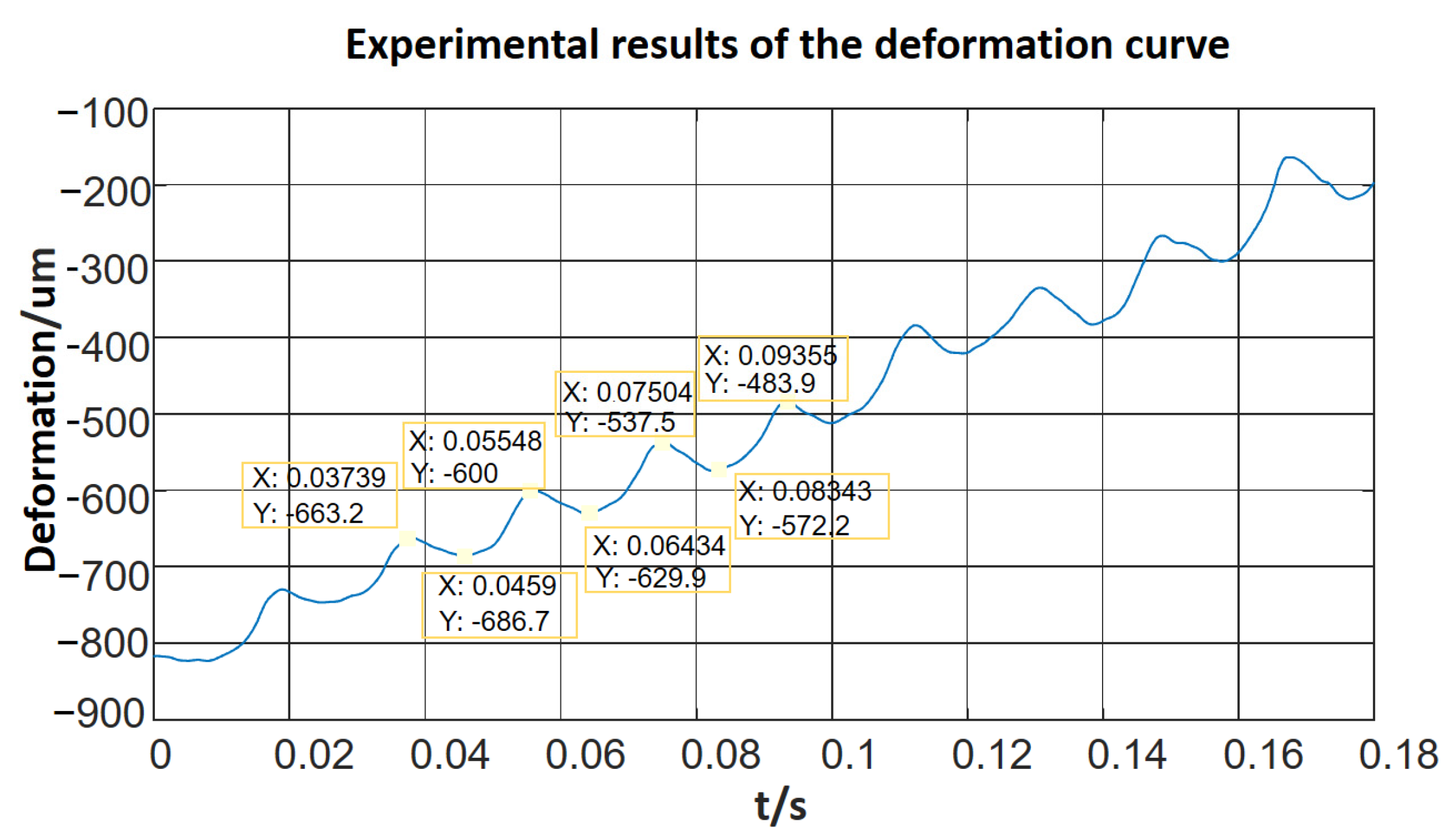
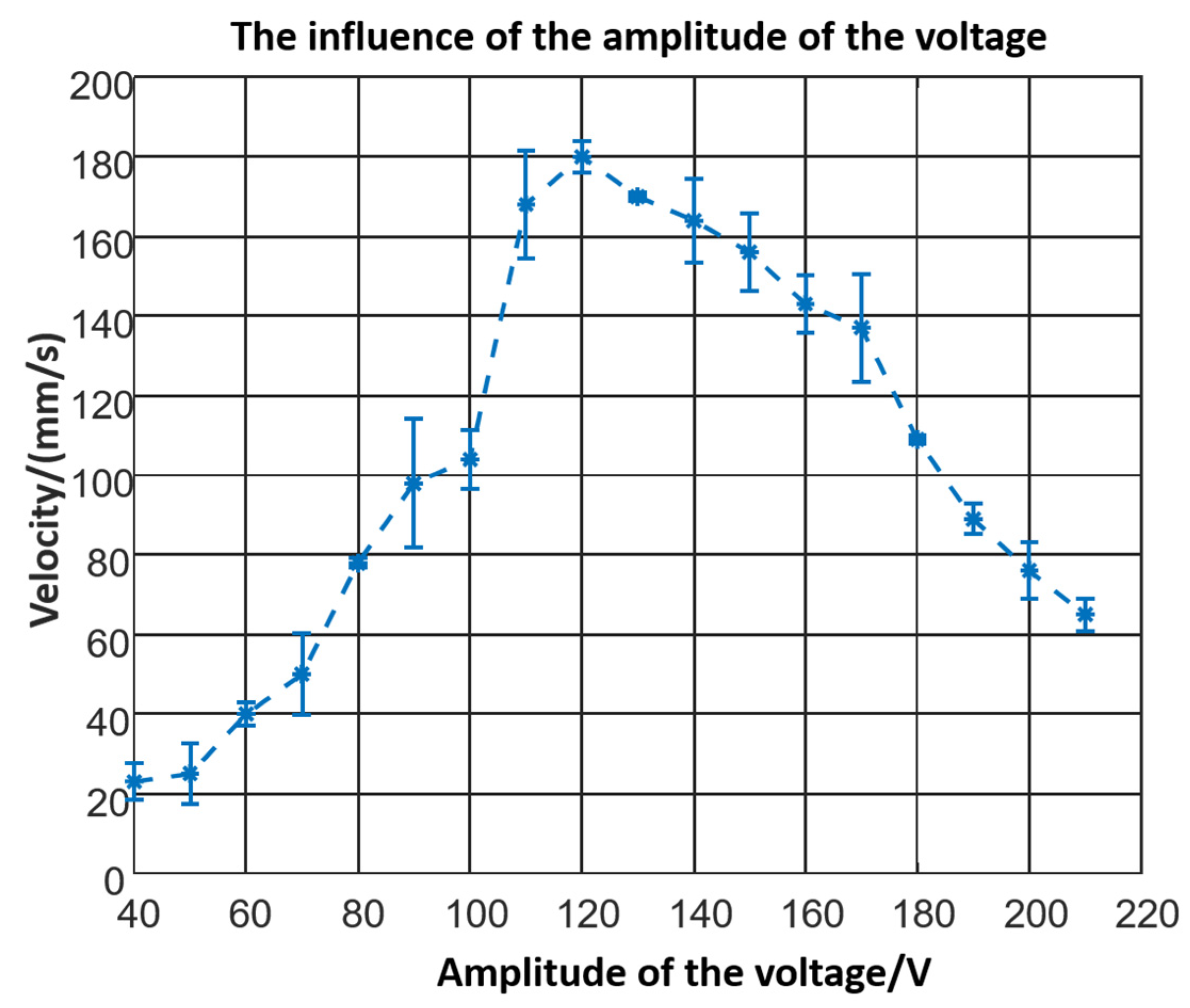
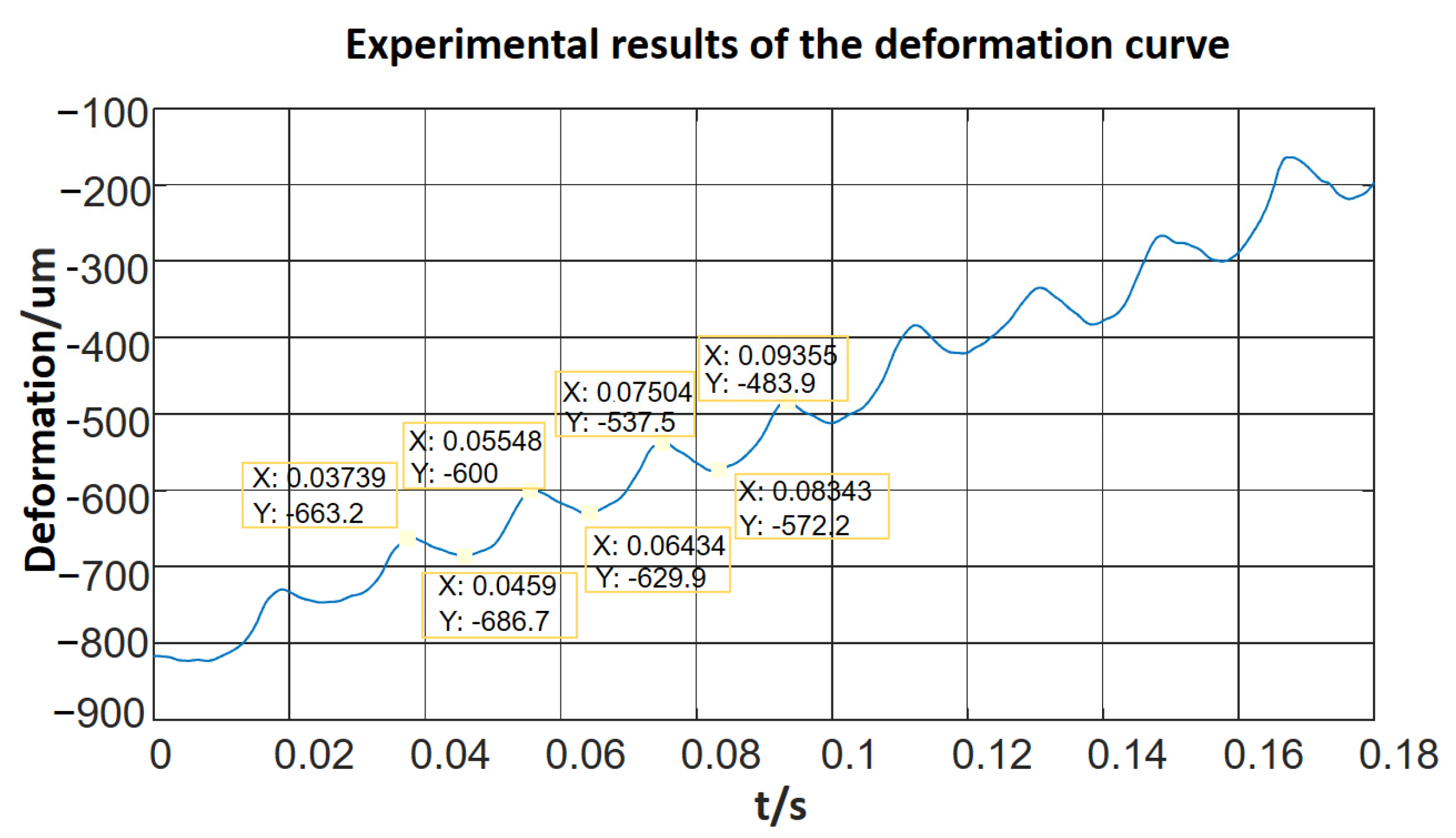
3.1.3. The Influence of the Powering
3.2. Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, J.; Huang, H.; Morita, T. Stepping piezoelectric actuators with large working stroke for nano-positioning systems: A review. Sens. Actuators A Phys. 2019, 292, 39–51. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Self-Moving Cell Linear Motor Using Piezo Actuators. In Proceedings of the Volume 6B: 18th Biennial Conference on Mechanical Vibration and Noise; American Society of Mechanical Engineers: New York, NY, USA, 2001; Volume 6, pp. 1611–1614. [Google Scholar]
- Li, J.; Sedaghati, R.; Dargahi, J.; Waechter, D. Design and development of a new piezoelectric linear Inchworm actuator. Mechatronics 2005, 15, 651–681. [Google Scholar] [CrossRef]
- Hua, S.; Liu, G.; Wang, X.; Wang, Y.; Li, J. A Piezoelectric Inchworm Actuator with Bidirectional Thrust Force. Sens. Transducers 2014, 171, 169. [Google Scholar]
- Ma, X.; Liu, Y.; Deng, J.; Zhang, S.; Liu, J. A walker-pusher inchworm actuator driven by two piezoelectric stacks. Mech. Syst. Signal Process. 2021, 108636, 108636. [Google Scholar] [CrossRef]
- Hunstig, M. Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives. Actuators 2017, 6, 7. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.; Sun, M. Design, Analysis, and Experiment on a Novel Stick-Slip Piezoelectric Actuator with a Lever Mechanism. Micromachines 2019, 10, 863. [Google Scholar] [CrossRef] [Green Version]
- Delibas, B.; Koc, B. L1B2 Piezo Motor Using D33 Effect. In Proceedings of the ACTUATOR 2018, 16th International Conference on New Actuators, Bremen, Germany, 25–27 June 2018; pp. 1–4. [Google Scholar]
- Izuhara, S.; Mashimo, T. Design and evaluation of a micro linear ultrasonic motor. Sens. Actuators A Phys. 2018, 278, 60–66. [Google Scholar] [CrossRef]
- Tian, X.; Quan, Q.; Wang, L.; Su, Q. An Inchworm Type Piezoelectric Actuator Working in Resonant State. IEEE Access 2018, 6, 18975–18983. [Google Scholar] [CrossRef]
- Rafsanjani, A.; Zhang, Y.; Liu, B.; Rubinstein, S.M.; Bertoldi, K. Kirigami skins make a simple soft actuator crawl. Sci. Robot. 2018, 3. [Google Scholar] [CrossRef] [Green Version]
- Henke, E.-F.M.; Schlatter, S.; Anderson, I.A. Soft Dielectric Elastomer Oscillators Driving Bioinspired Robots. Soft Robot. 2017, 4, 353–366. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, C.; Sim, K.; Chen, J.; Kim, H.; Rao, Z.; Li, Y.; Chen, W.; Song, J.; Verduzco, R.; Yu, C. Soft Ultrathin Electronics Innervated Adaptive Fully Soft Robots. Adv. Mater. 2018, 30, e1706695. [Google Scholar] [CrossRef] [Green Version]
- Lin, H.-T.; Leisk, G.G.; Trimmer, B. GoQBot: A caterpillar-inspired soft-bodied rolling robot. Bioinspirat. Biomim. 2011, 6, 026007. [Google Scholar] [CrossRef]
- Umedachi, T.; Vikas, V.; Trimmer, B.A. Highly deformable 3-D printed soft robot generating inching and crawling locomotions with variable friction legs. In 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems; IEEE: Piscataway, NJ, USA, 2013; pp. 4590–4595. [Google Scholar] [CrossRef]
- Ji, Z.; Yan, C.; Ma, S.; Zhang, X.; Jia, X.; Wang, X.; Zhou, F. Biomimetic Surface with Tunable Frictional Anisotropy Enabled by Photothermogenesis-Induced Supporting Layer Rigidity Variation. Adv. Mater. Interfaces 2019, 6, 1801460. [Google Scholar] [CrossRef]
- Day, P.; Eason, E.V.; Esparza, N.; Christensen, D.; Cutkosky, M. Microwedge Machining for the Manufacture of Directional Dry Adhesives. J. Micro Nano-Manuf. 2013, 1, 011001. [Google Scholar] [CrossRef]
- Wang, R.; Wang, L.; Jin, J.; Jia, B.; Zhang, Q.; Wu, D. Excitation method and electromechanical coupling dynamic model of a novel torsional piezoelectric actuator. Mech. Syst. Signal Process. 2021, 154, 107587. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Powering Material | Size (mm × mm × mm) | Velocity (mm/s) | Stimulation |
|---|---|---|---|
| Piezoelectric [5] | 100.6 × 74.6 × 7 | 1641 | 100 V 41.35 kHz |
| Pneumatic [6] | 164 × 25 × 25 | 6 | 30 kPa |
| EPA [7] | 250 × 8 × - | 1 | 4 kV |
| Laser [8] | 30 × 20 × 10 | 0.032 | 60 °C |
| SMA [9] | 10 × - × - | 0.2 | 15 W |
| Piezoelectric (in this article) | 202 × 20 × 30 | 178.68 | 120 V 240 Hz |
| Parameters | Company | Density | Short Circuit Elastic Stiffness Coefficient | Piezoelectric Stress Constant | Clamping voltage Constant |
|---|---|---|---|---|---|
| Value | Harbin Rongzhi Naxin Technology Co., Ltd. | 7800 kg/m3 | 131.1 Gpa | −5.2 C/m | 5.63 × 10−9 F/m |
| Parameters | Value |
|---|---|
| Piezoelectric Ceramic(length × width × height) | 60 × 20 × 0.2 (mm × mm × mm) |
| 3D-printed body(width × height) | 20 × 0.2 (mm × mm) |
| L: Length of the horizontal beam | 100 (mm) |
| L1: Length of the inclined legs | 40/50/60/70 (mm) |
| θ: Angle of the inclined legs | 30/45/60/75 (°) |
| Spike angle | 30/40/50/60 (°) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, X.; Wu, Y.; Han, S.; Liu, Y.; Xiu, H.; Tian, F.; Ren, L. Theoretical and Experimental Investigations into a Crawling Robot Propelled by Piezoelectric Material. Micromachines 2021, 12, 1577. https://doi.org/10.3390/mi12121577
Zeng X, Wu Y, Han S, Liu Y, Xiu H, Tian F, Ren L. Theoretical and Experimental Investigations into a Crawling Robot Propelled by Piezoelectric Material. Micromachines. 2021; 12(12):1577. https://doi.org/10.3390/mi12121577
Chicago/Turabian StyleZeng, Xiangli, Yue Wu, Shangyan Han, Yanbo Liu, Haohua Xiu, Fengjun Tian, and Luquan Ren. 2021. "Theoretical and Experimental Investigations into a Crawling Robot Propelled by Piezoelectric Material" Micromachines 12, no. 12: 1577. https://doi.org/10.3390/mi12121577
APA StyleZeng, X., Wu, Y., Han, S., Liu, Y., Xiu, H., Tian, F., & Ren, L. (2021). Theoretical and Experimental Investigations into a Crawling Robot Propelled by Piezoelectric Material. Micromachines, 12(12), 1577. https://doi.org/10.3390/mi12121577