Development and Evaluation of an Adaptive Multi-DOF Finger with Mechanical-Sensor Integrated for Prosthetic Hand

 and
and
Abstract
:1. Introduction
Novelty and Contribution
2. Design of the Adaptive and Mechanical-Sensor Integrated Finger
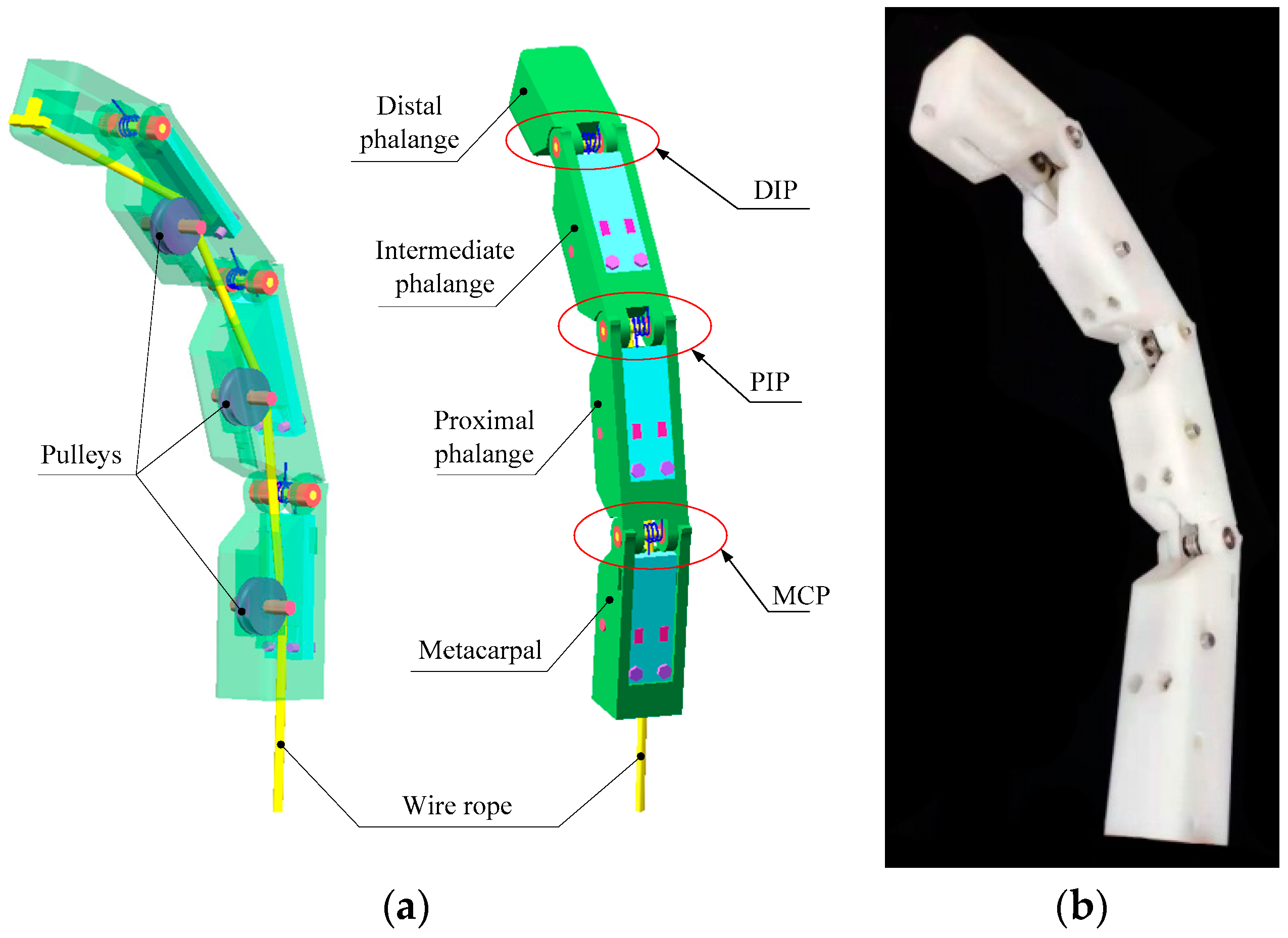
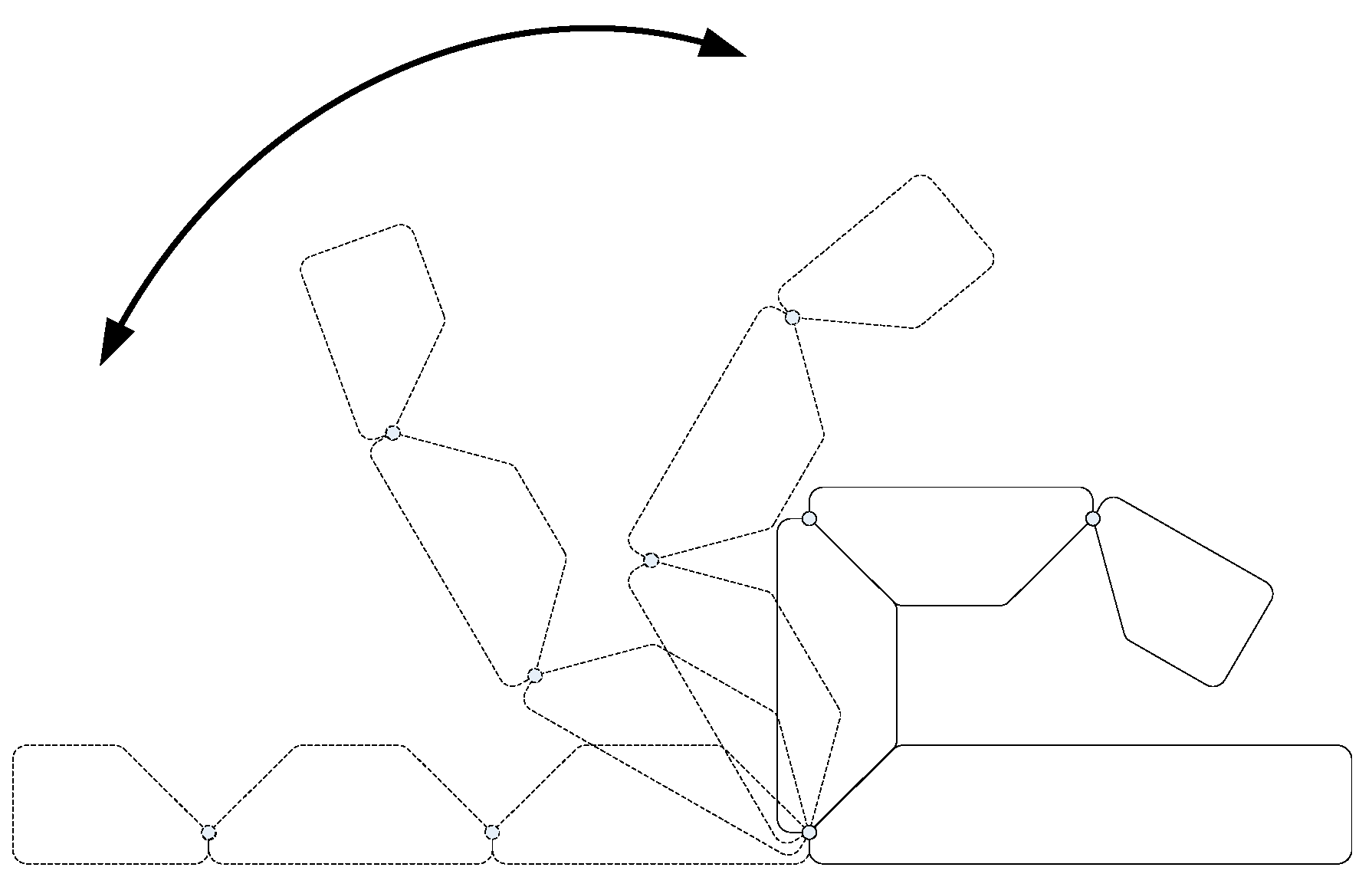
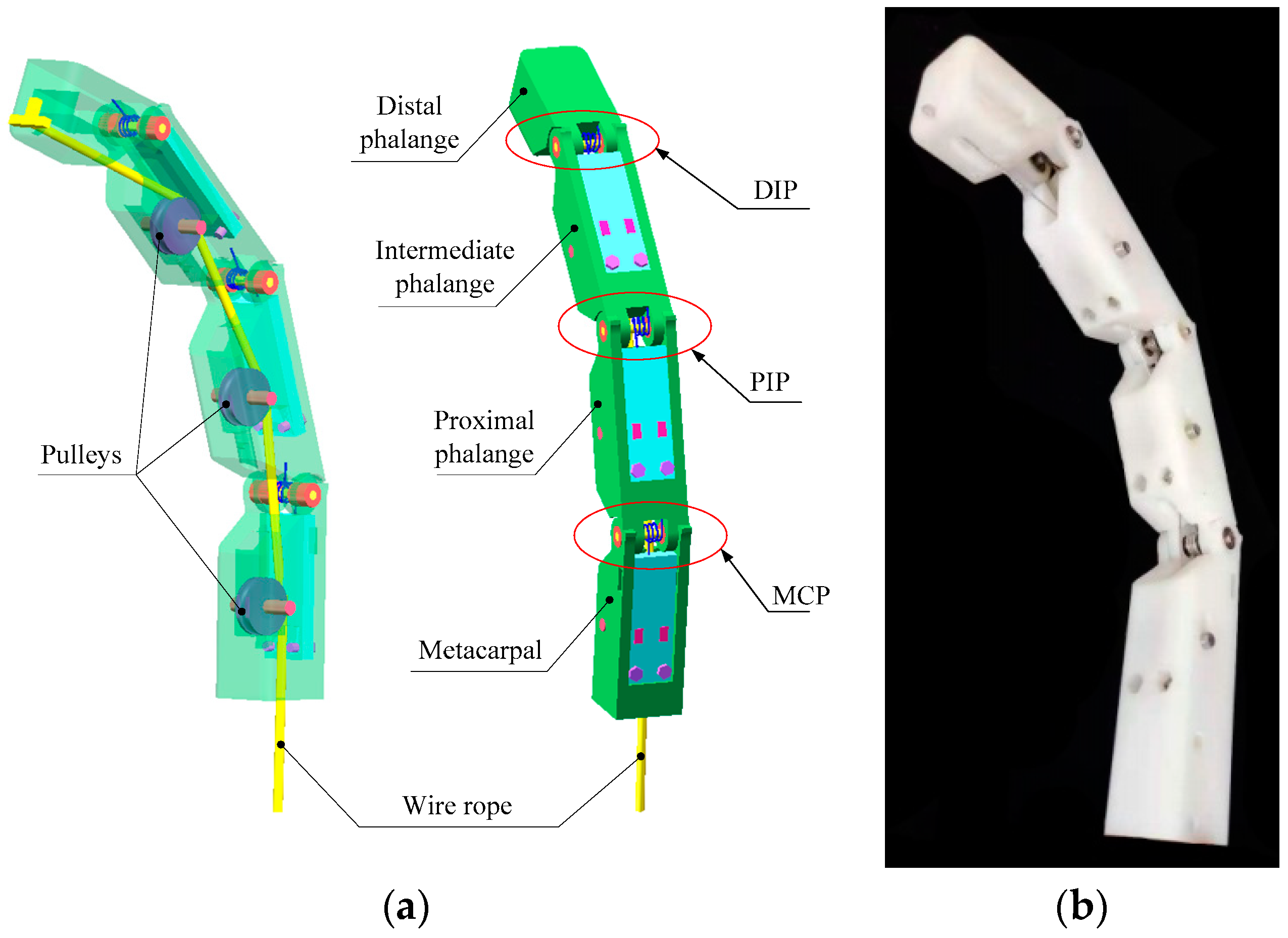
2.1. Design of the Adaptive Finger Structure
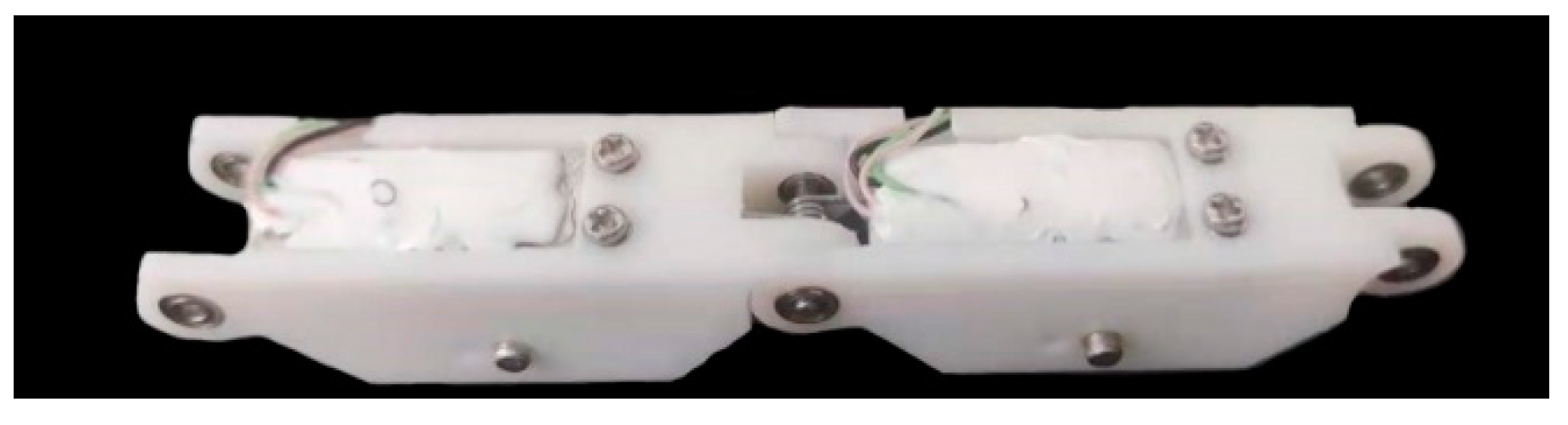
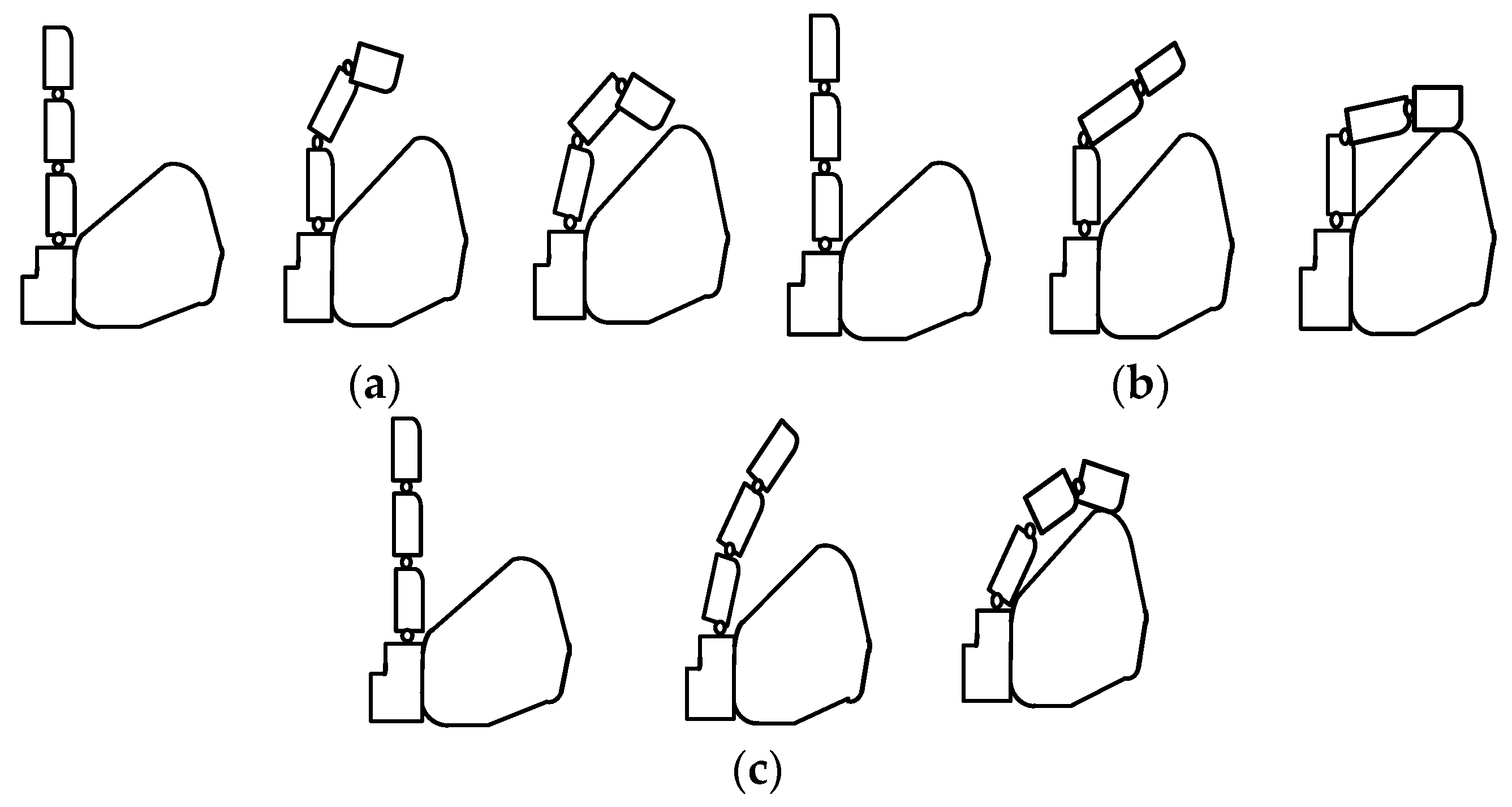
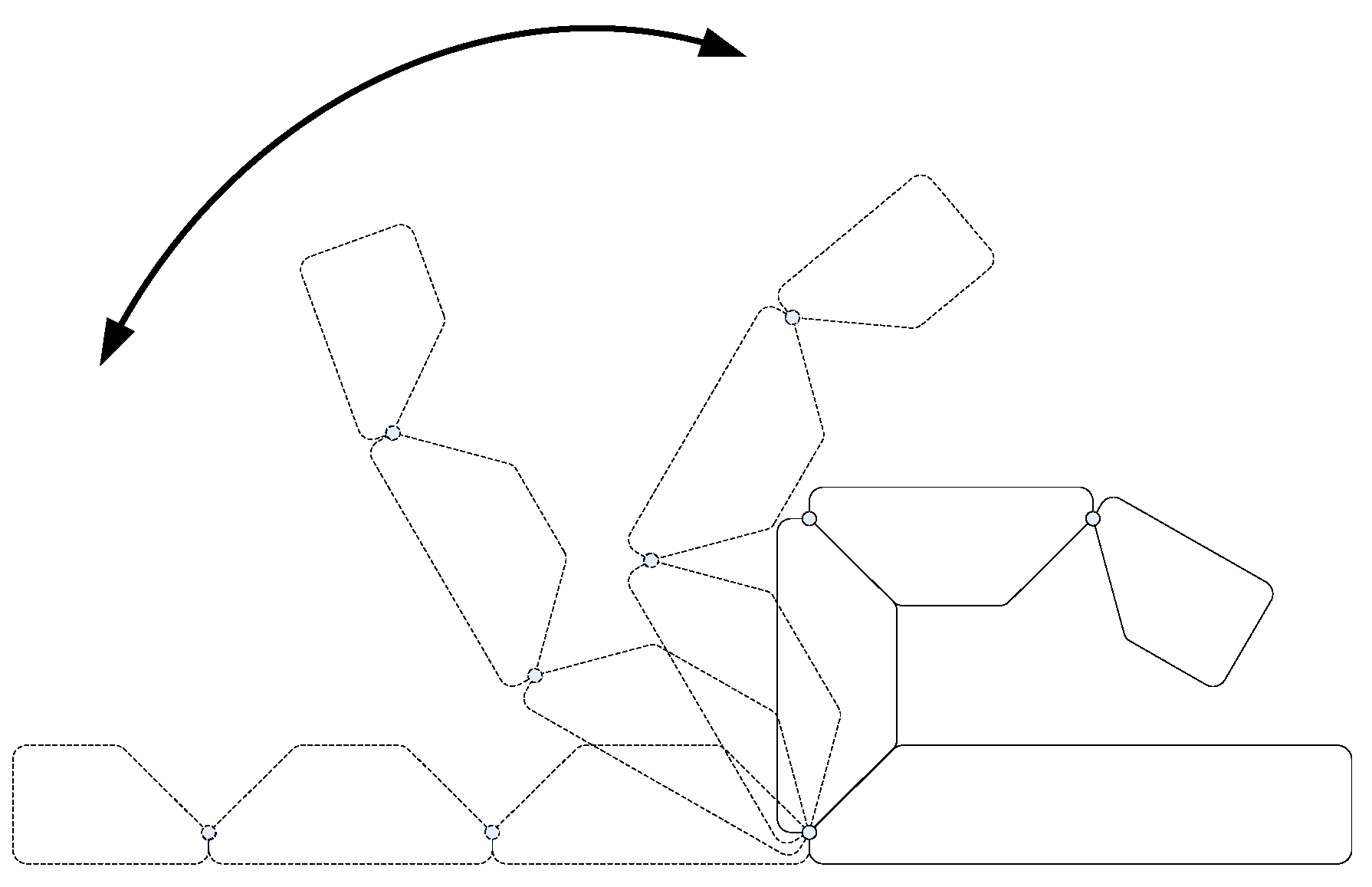
2.1.1. Prototype Design
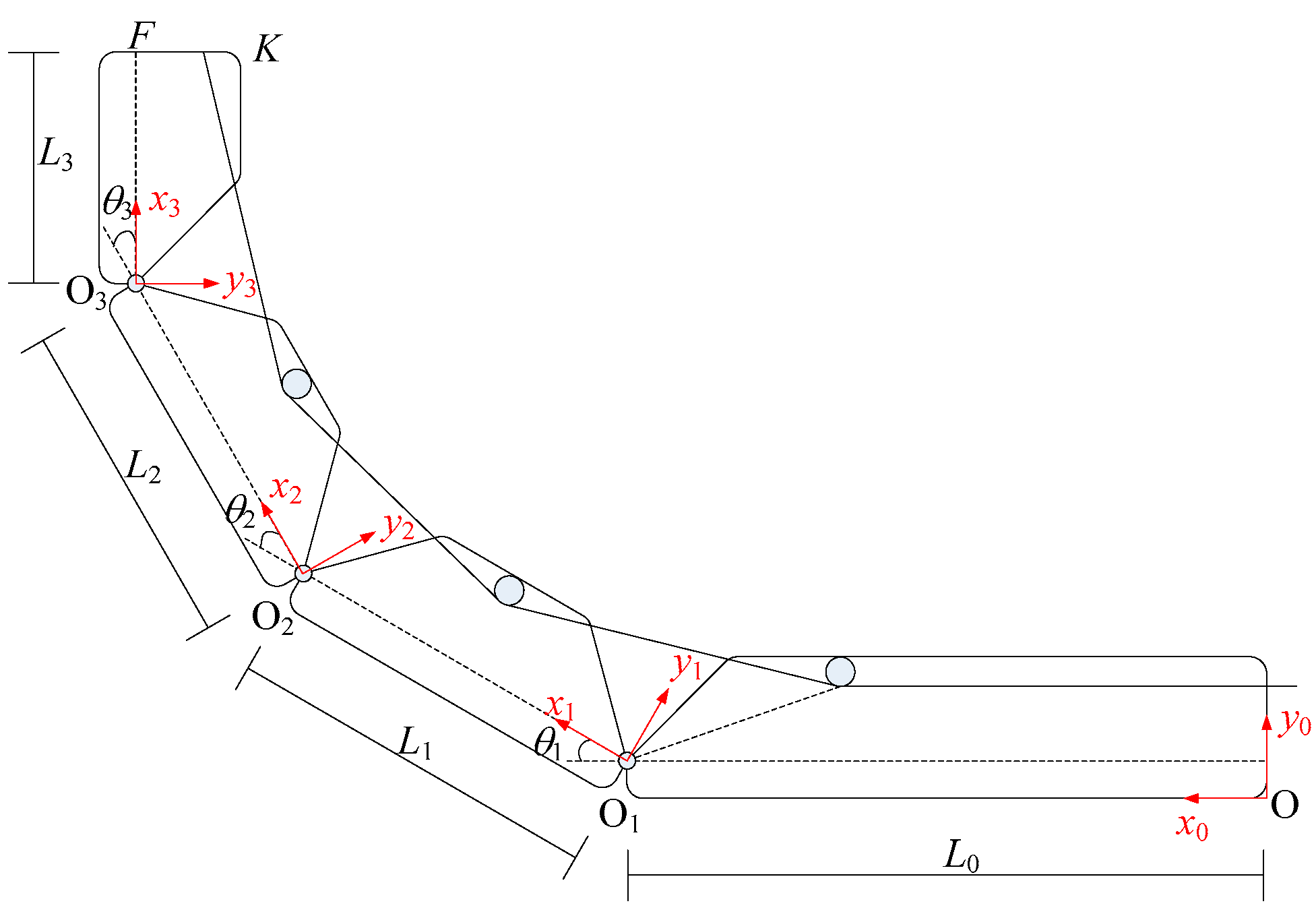
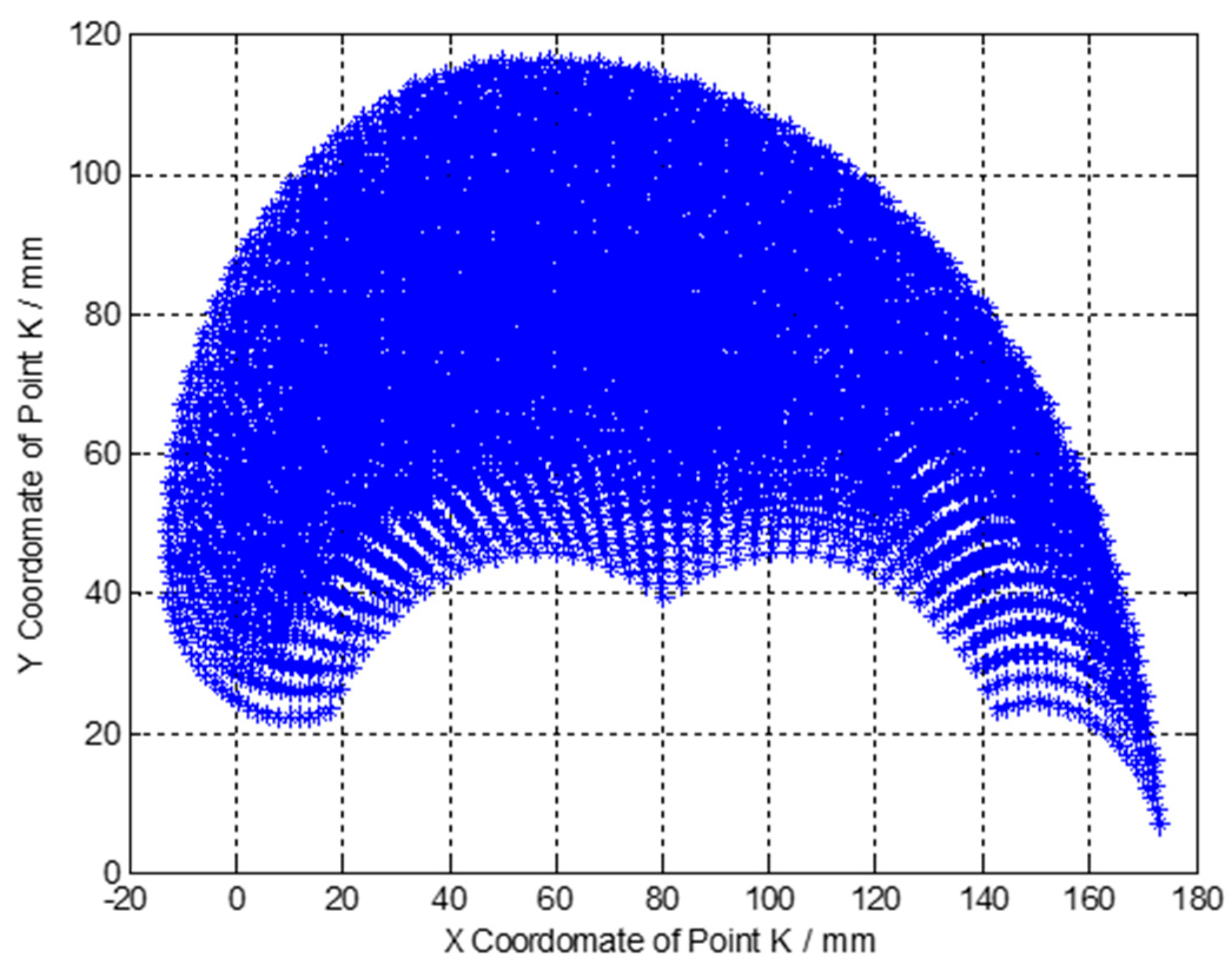
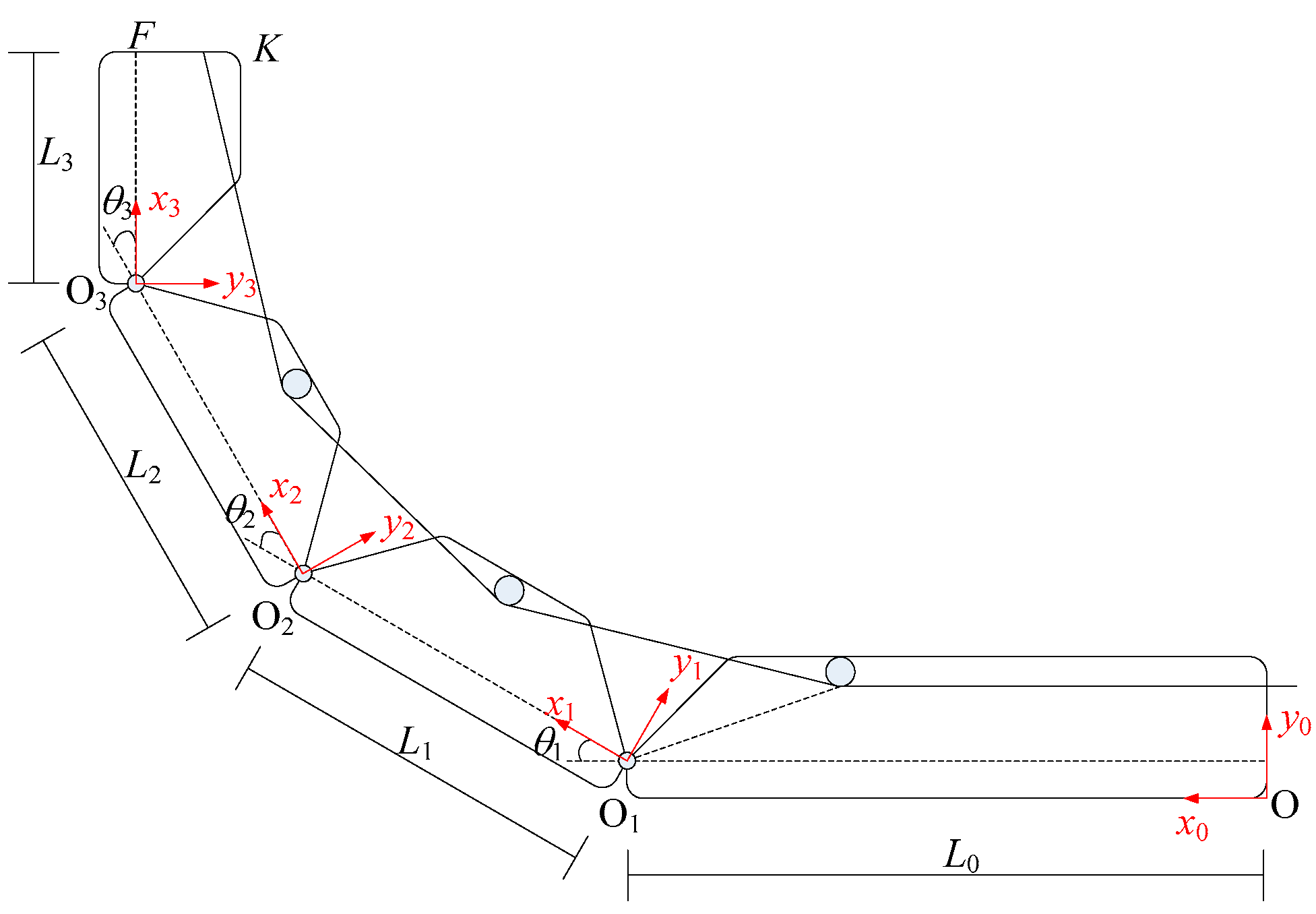
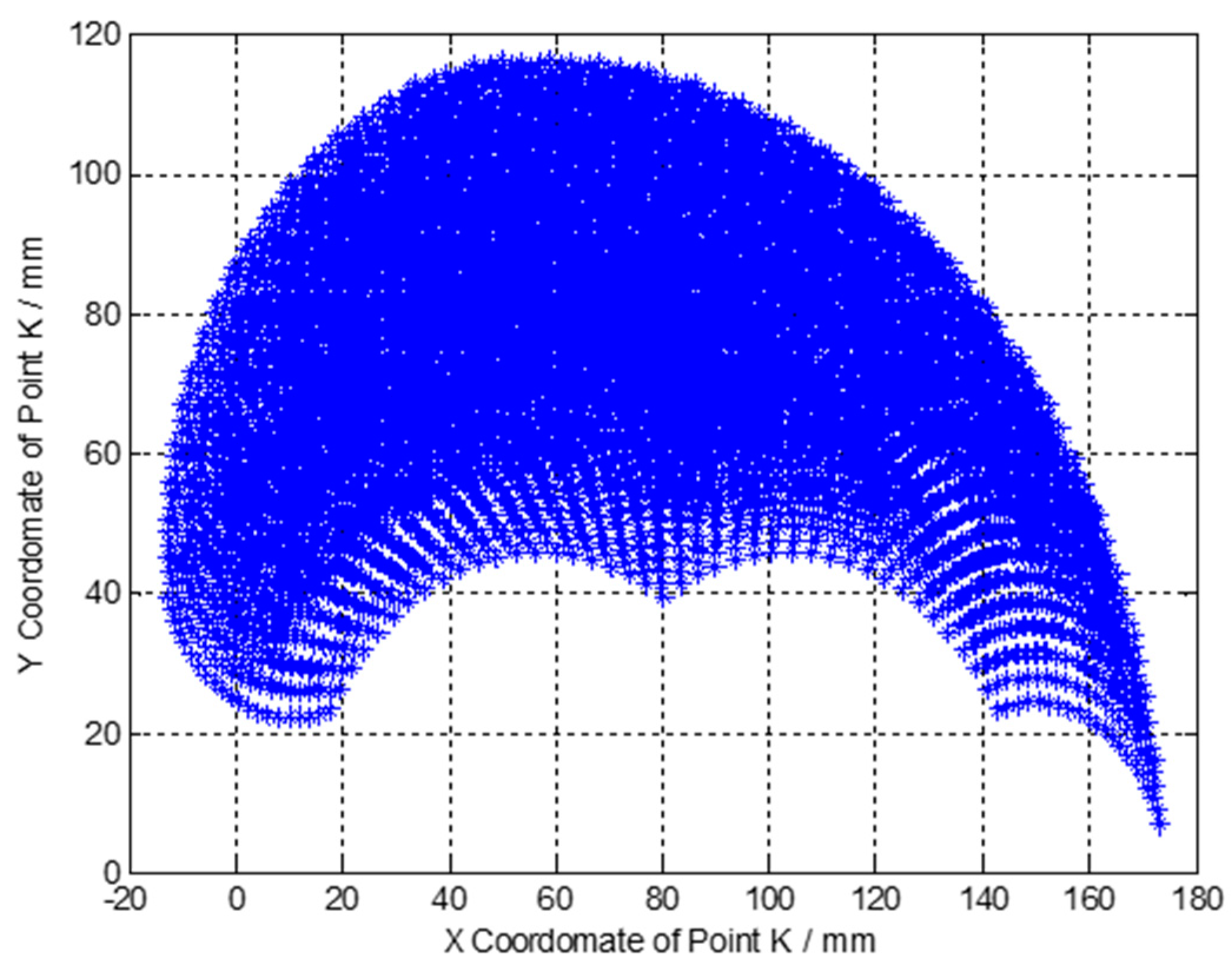
2.1.2. Forward Kinematics
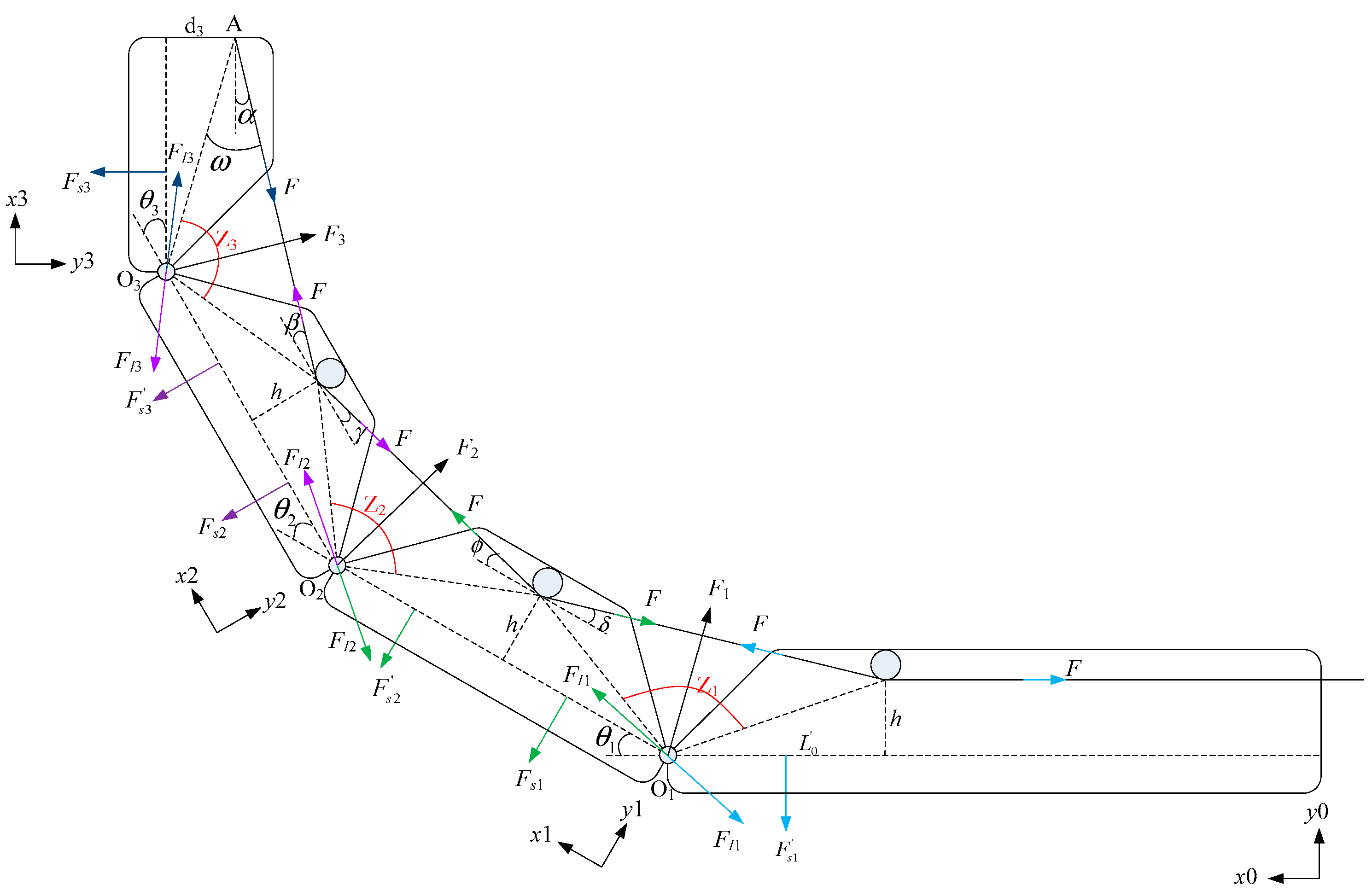
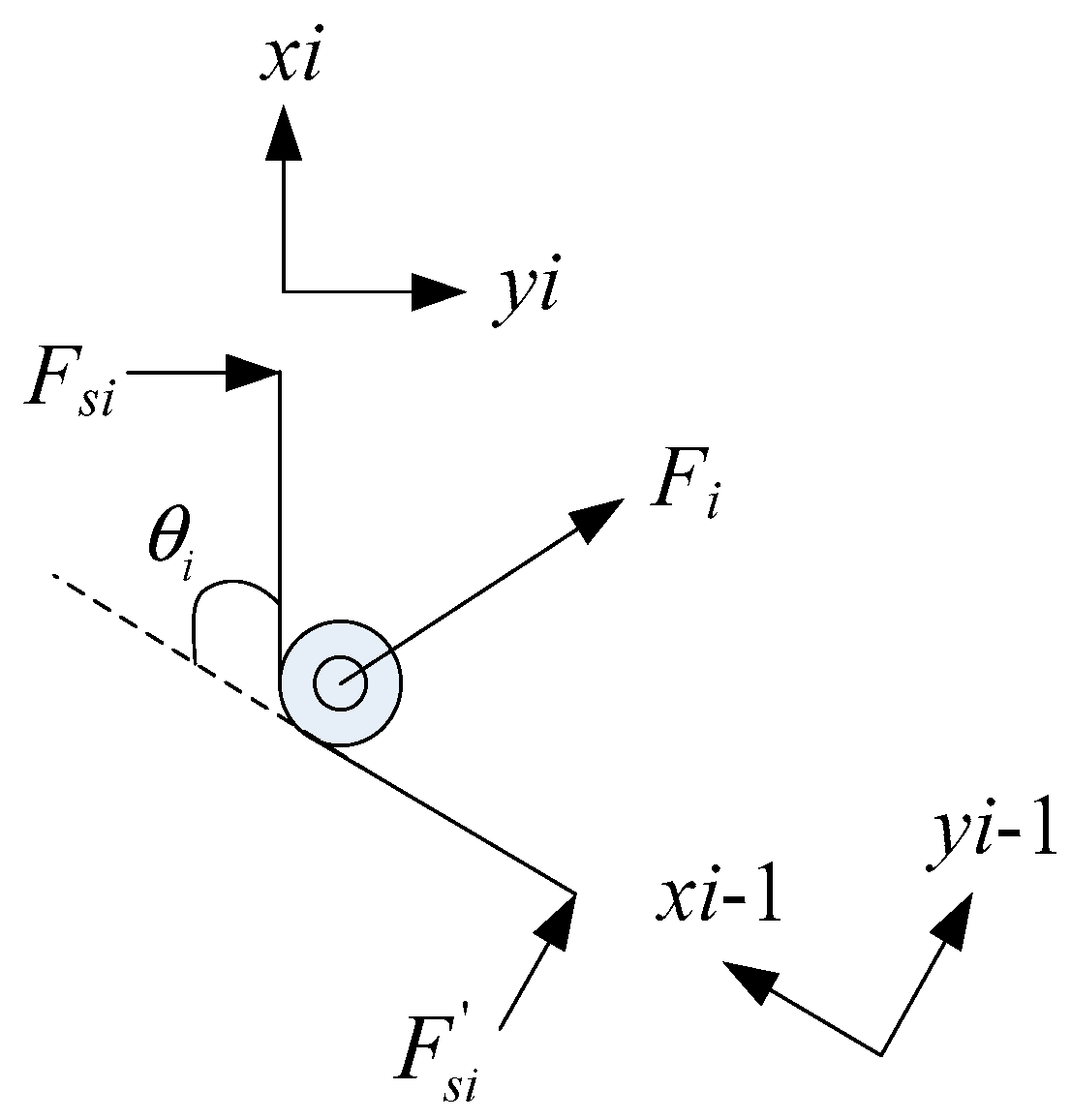
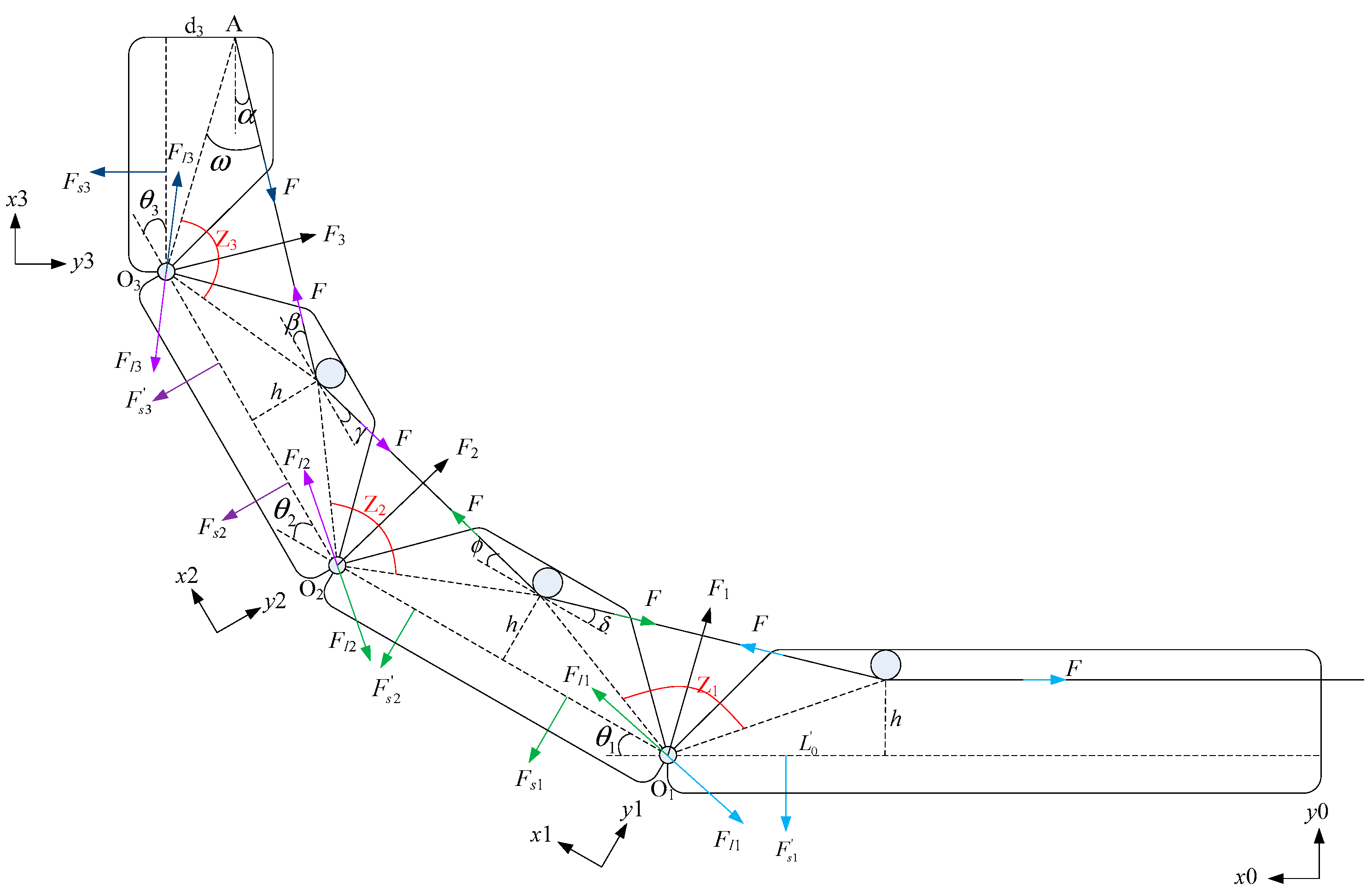
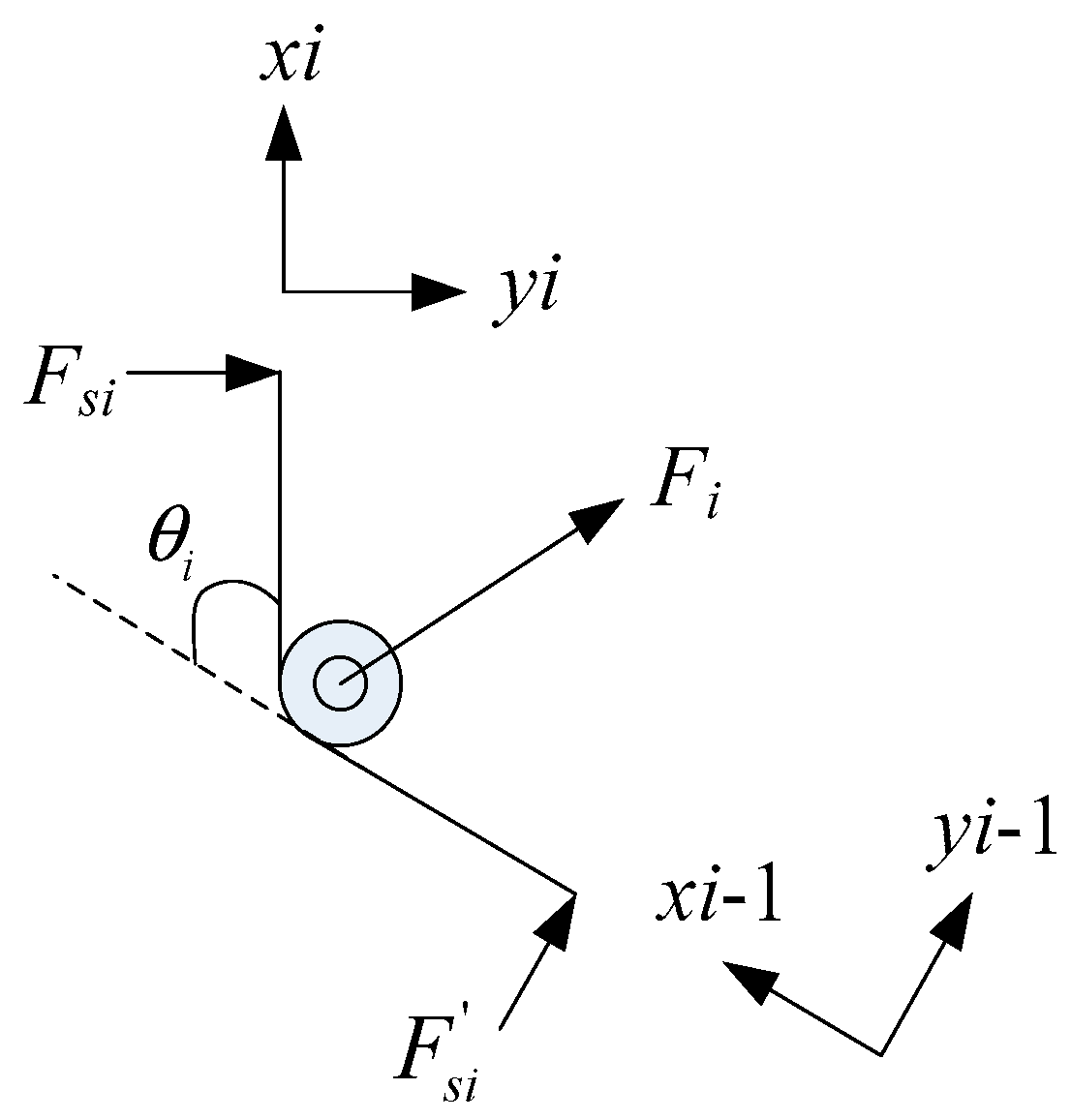
2.1.3. Mechanical Analysis
2.2. Mechanical-Sensor Integrated Finger Joint
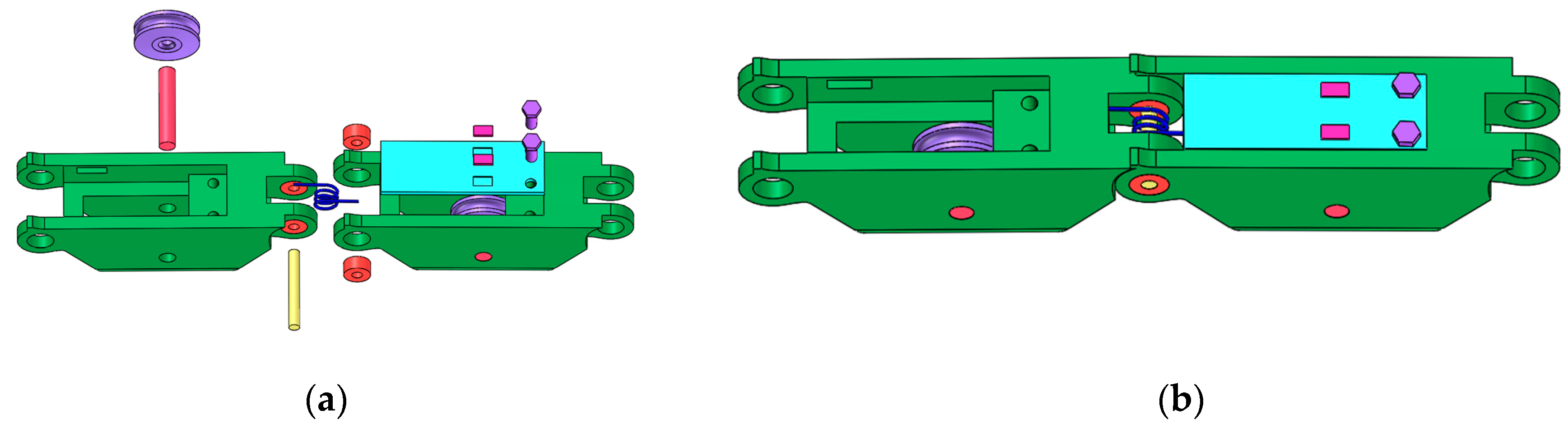
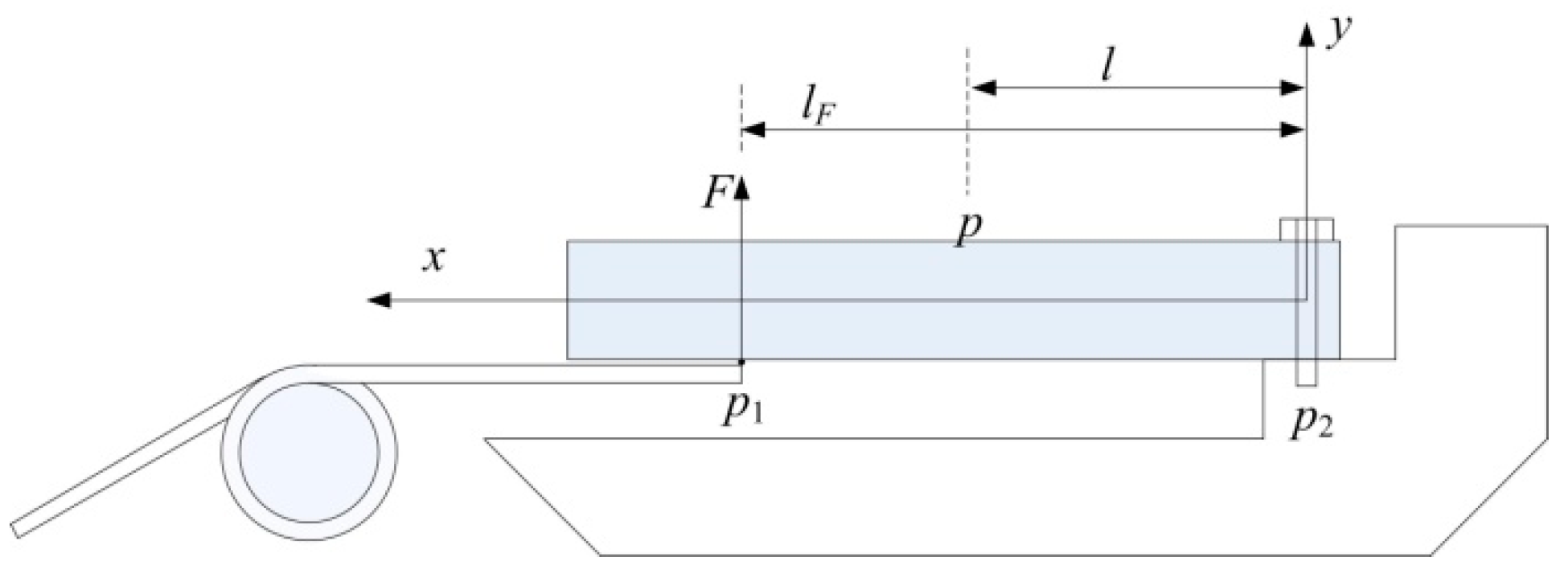
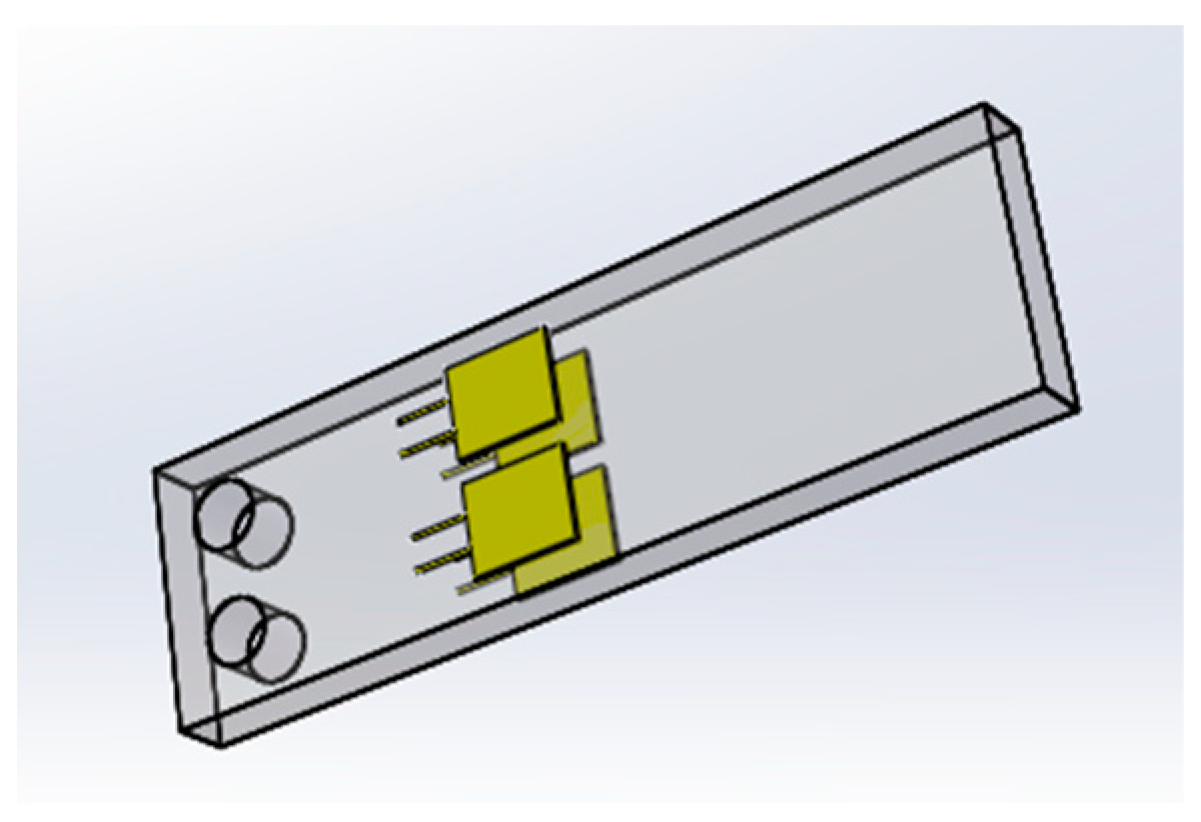
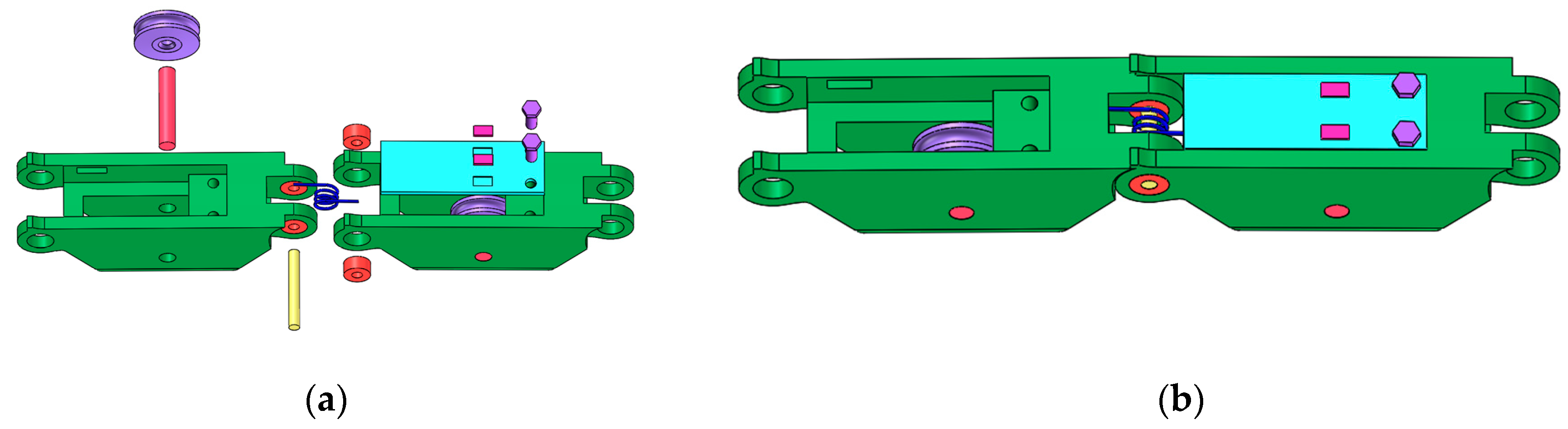
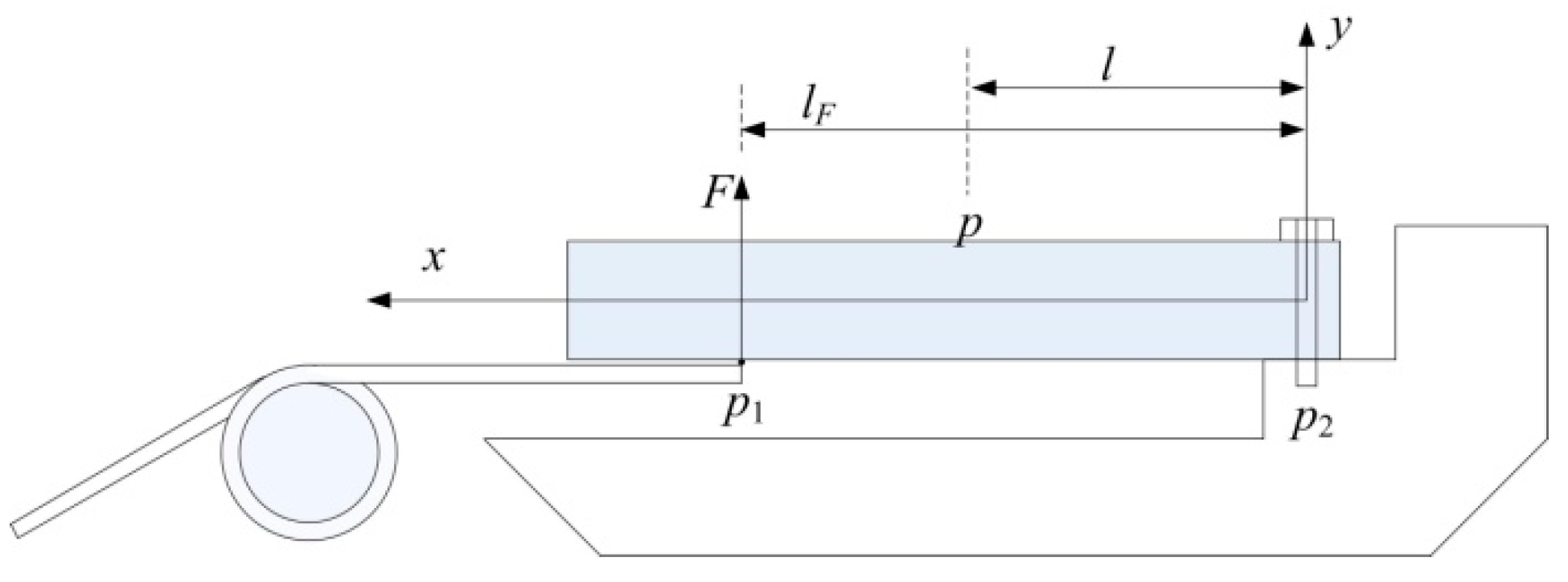
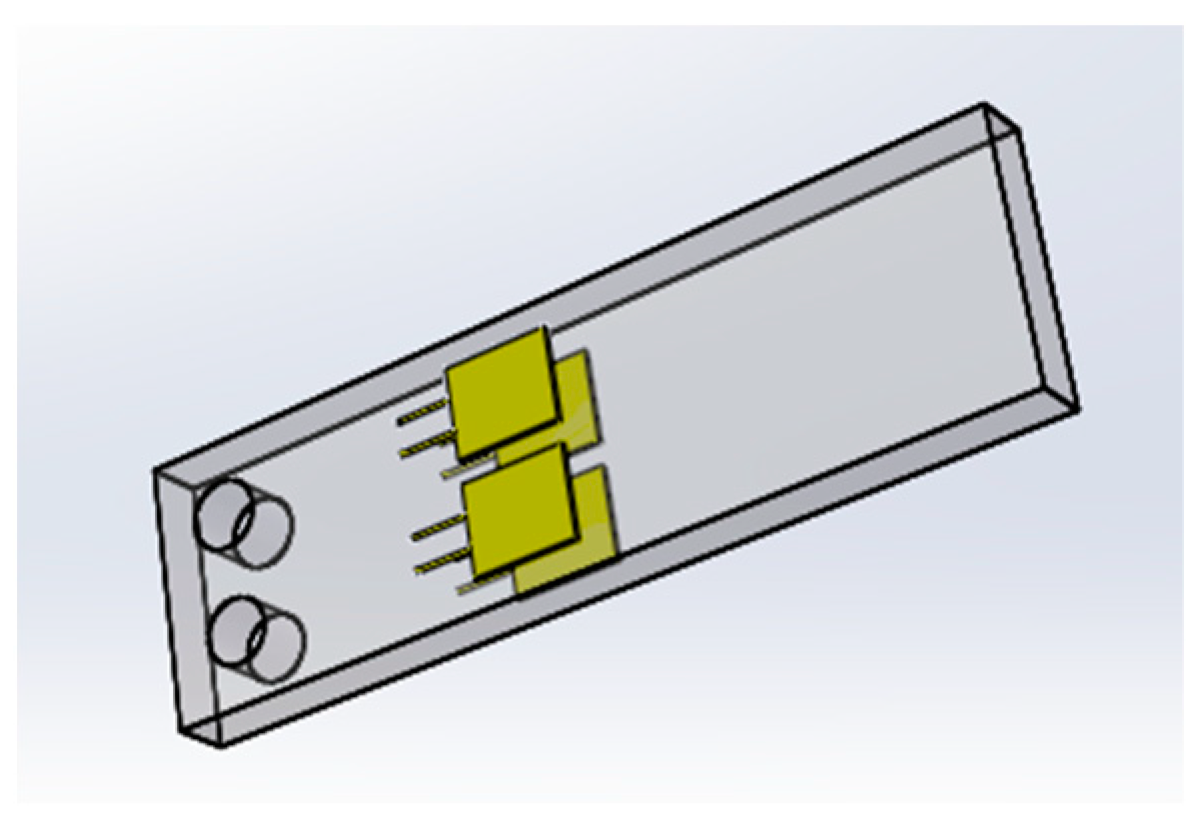
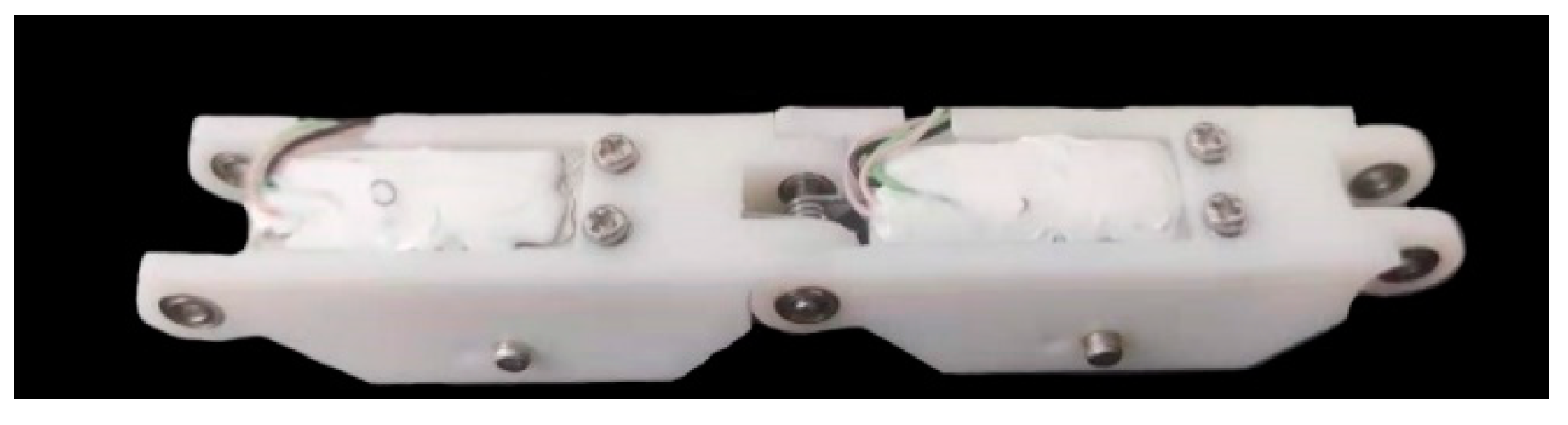
2.2.1. Analysis of Finger Joint Structure
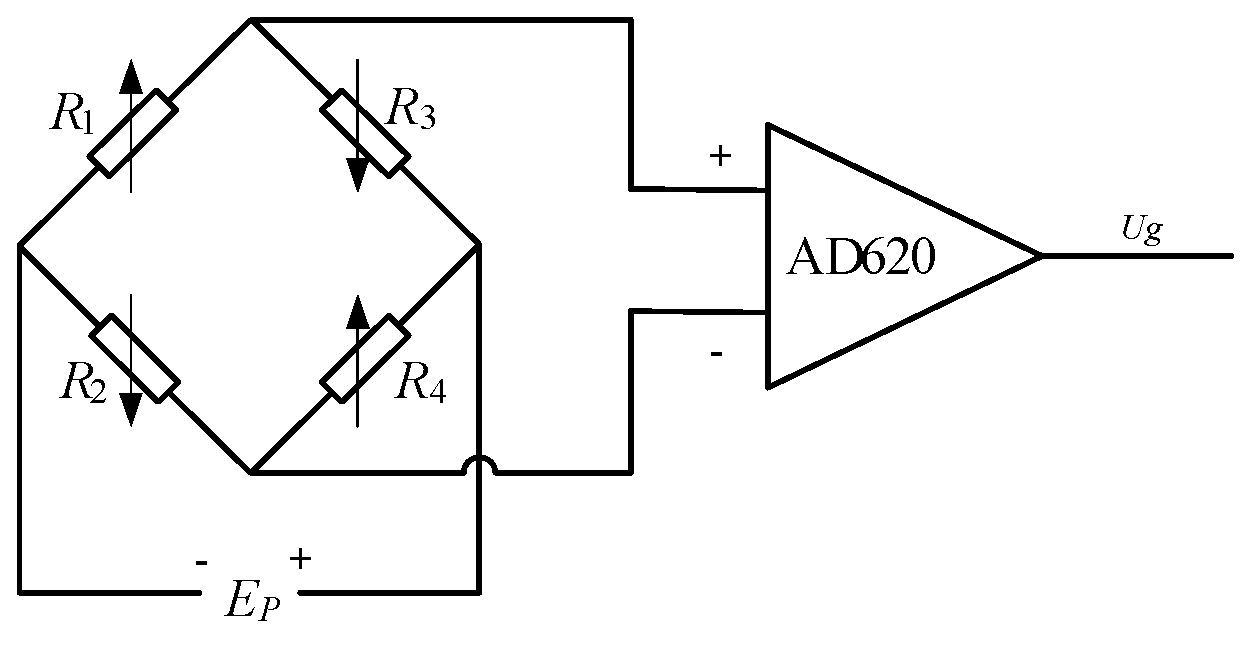
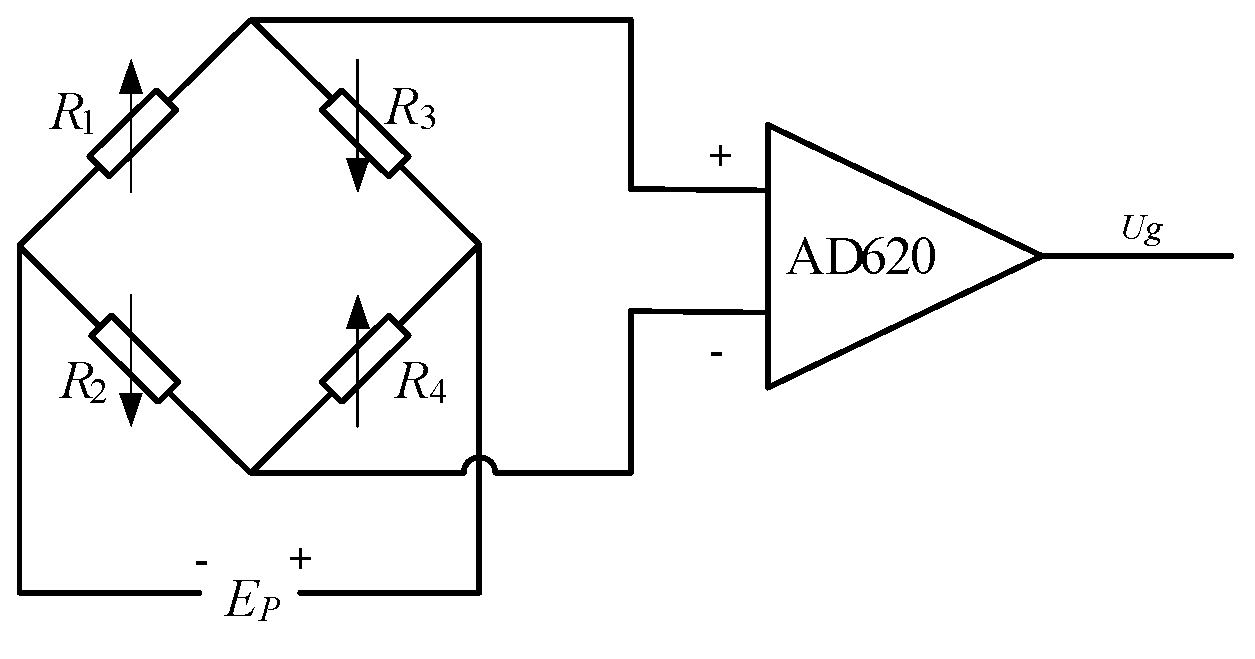
2.2.2. Signal Measurement Circuit
3. Experiments and Results
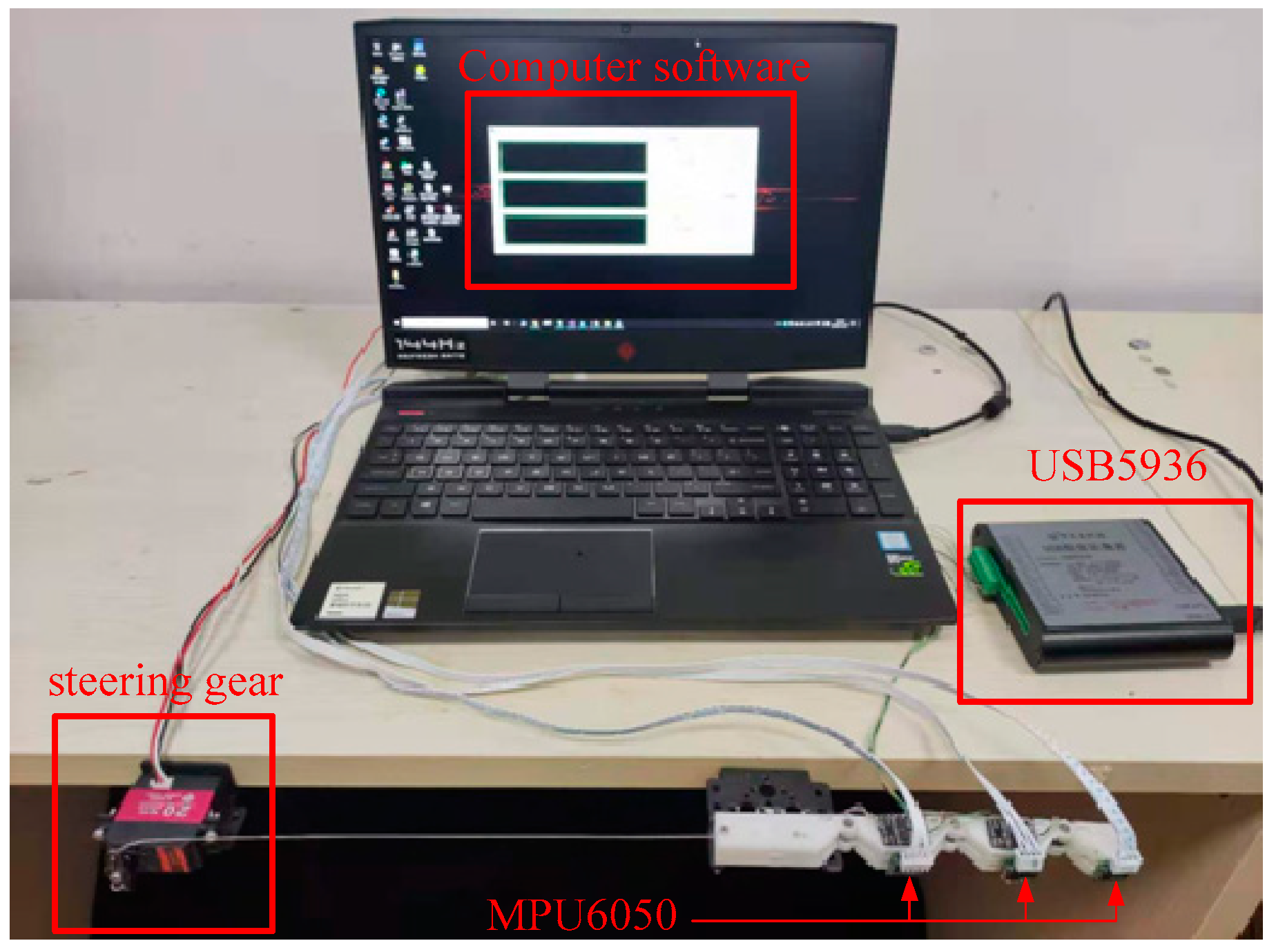
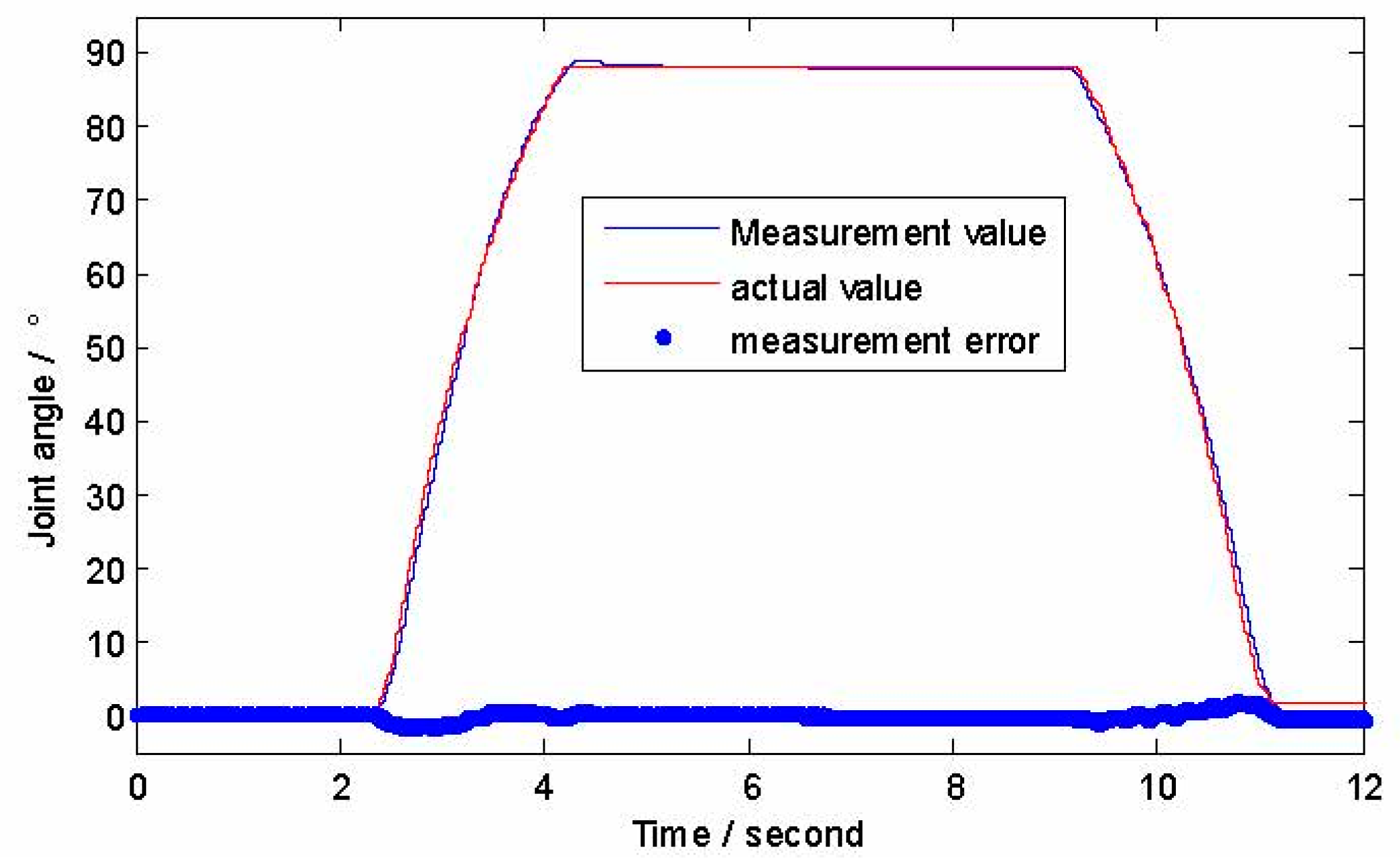
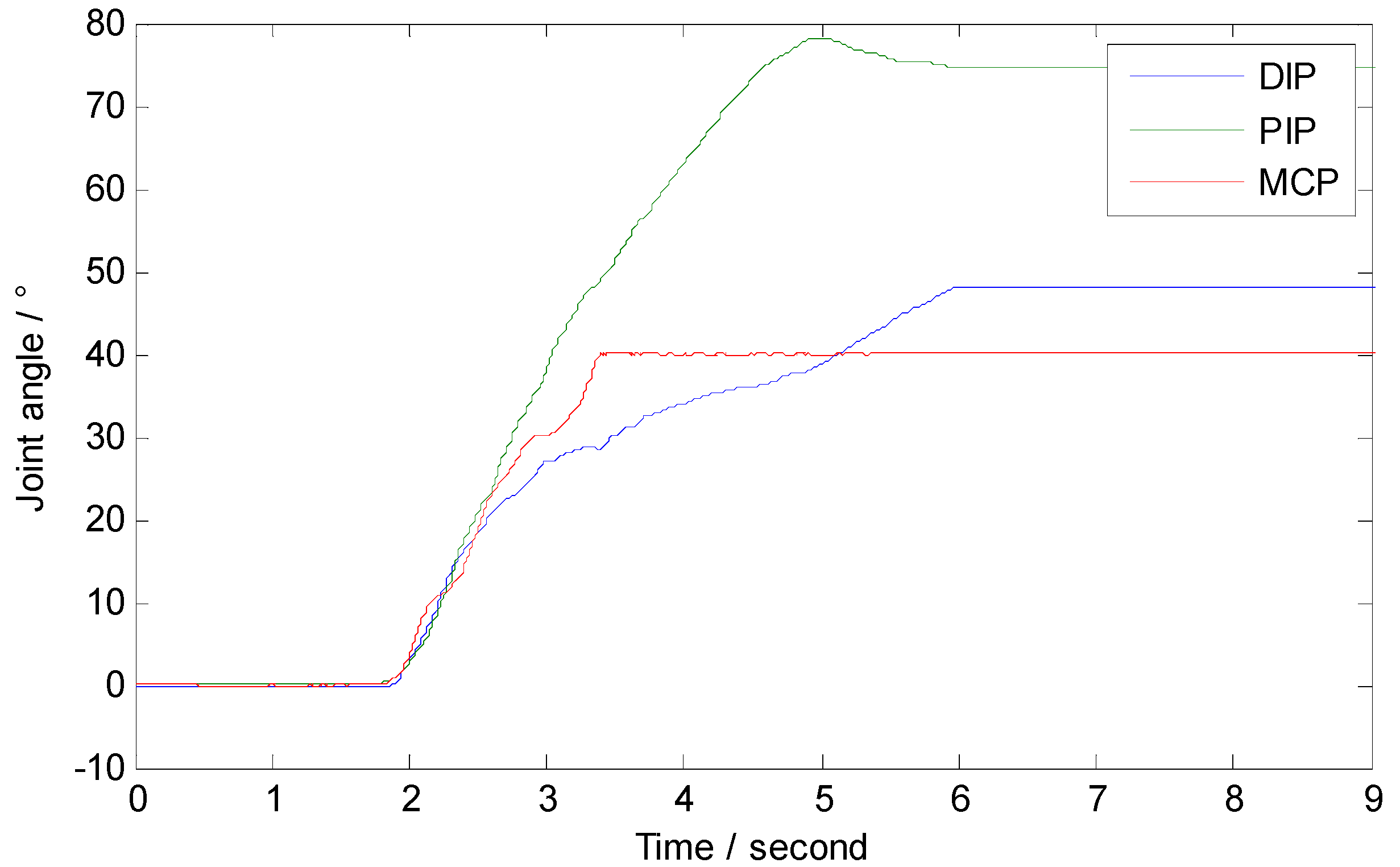
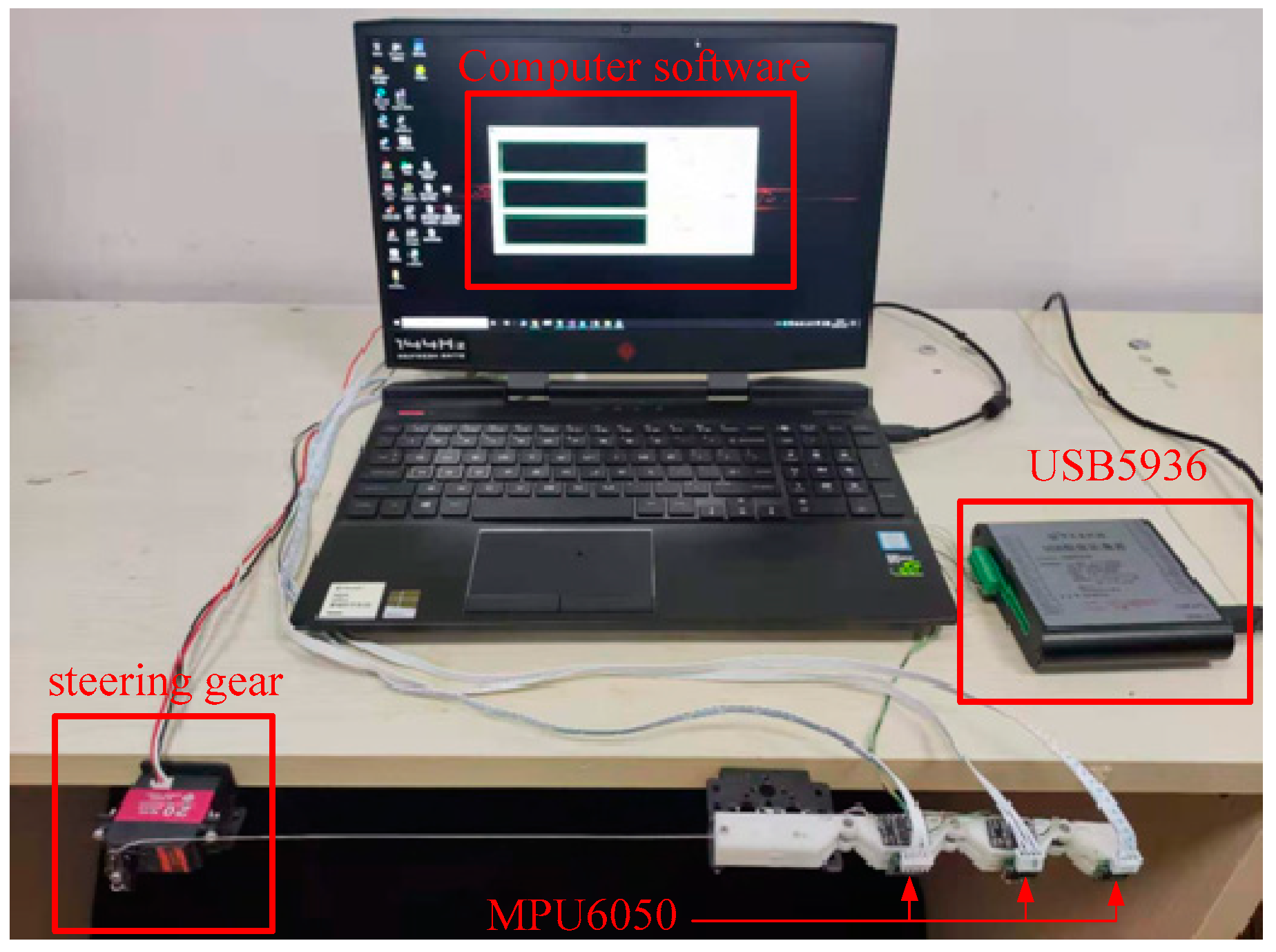
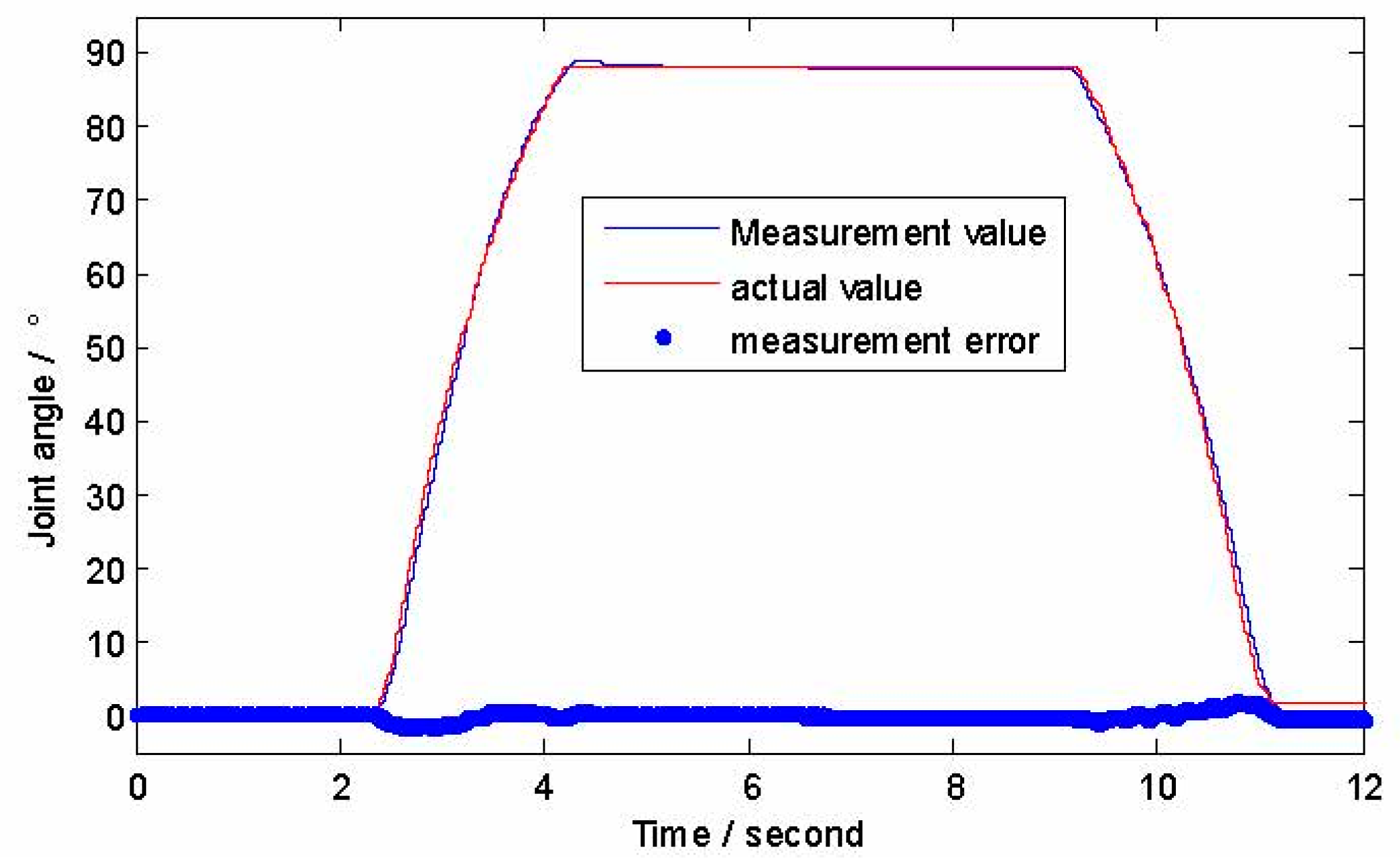
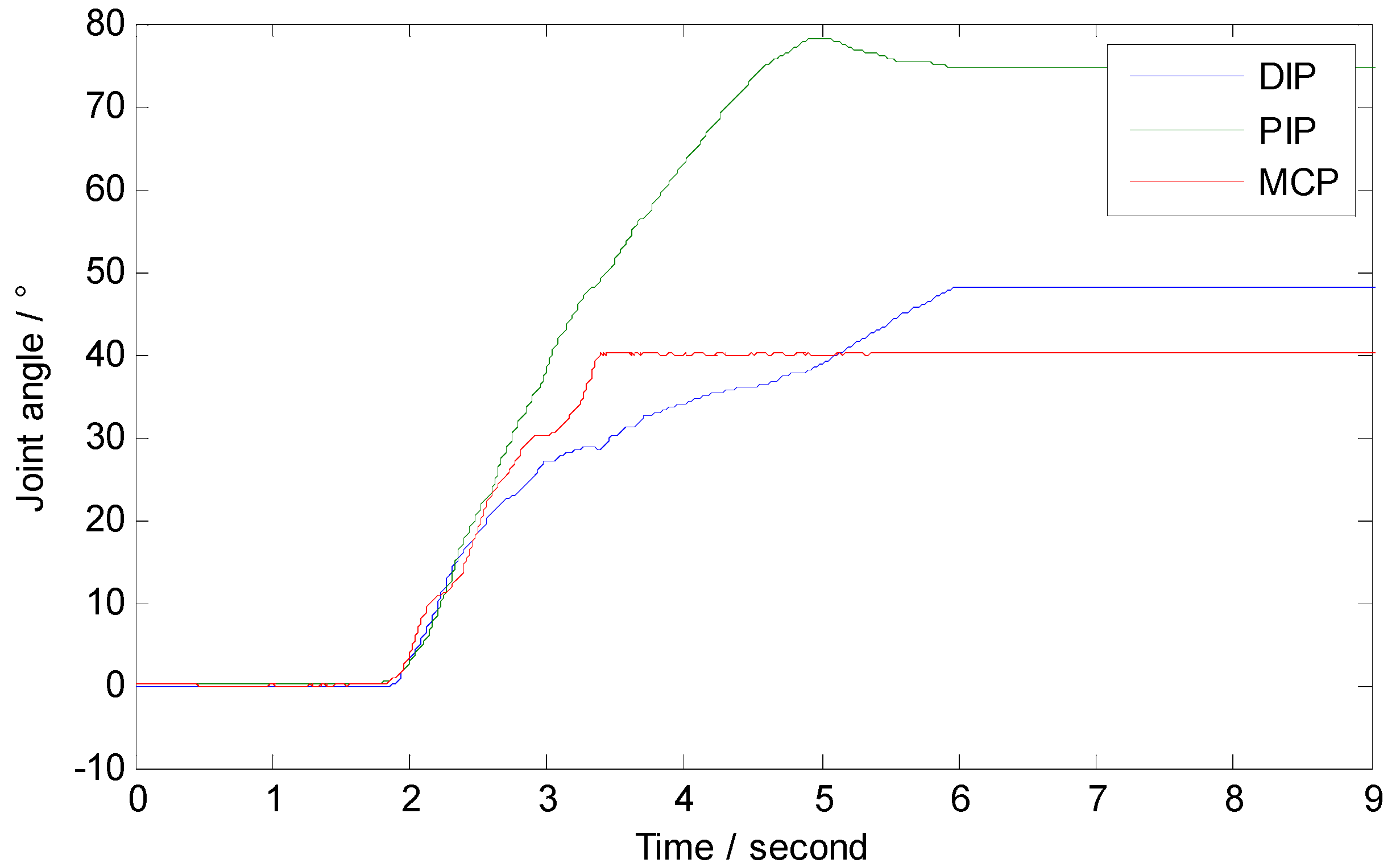
3.1. Joint Angle Measurement Experiment
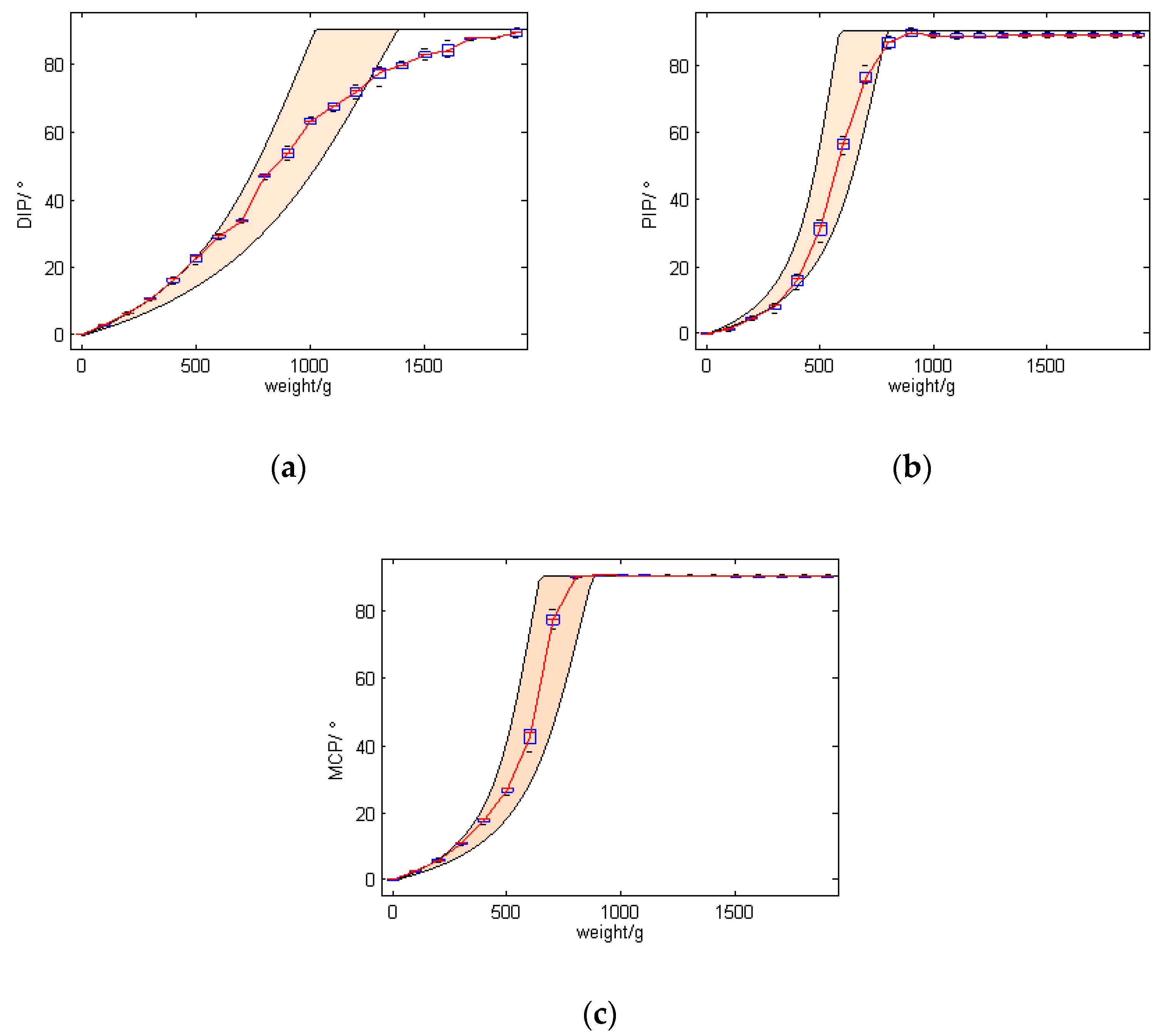
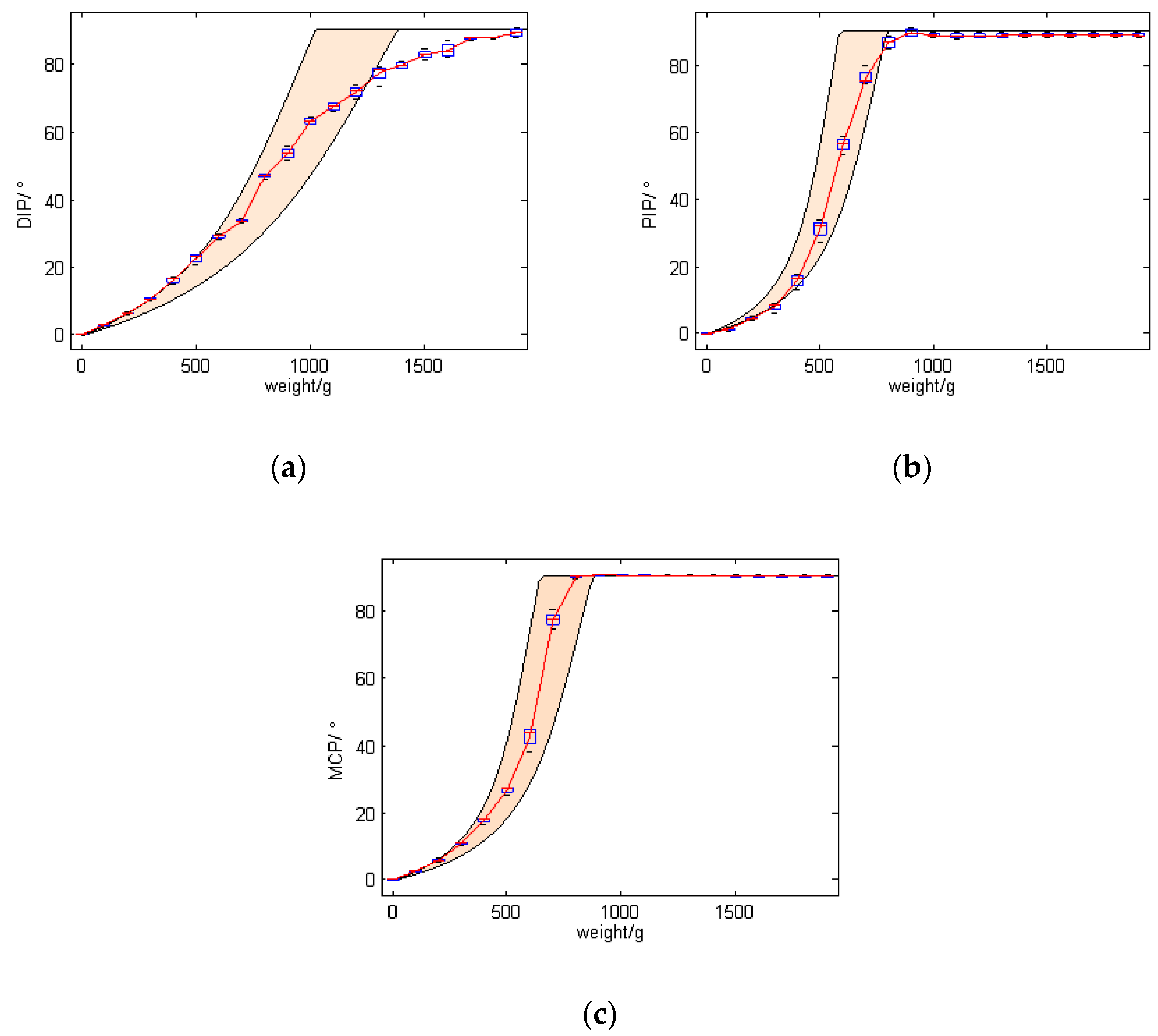
3.2. Evaluating the Relationship between Driving Force and Finger Bending Angle
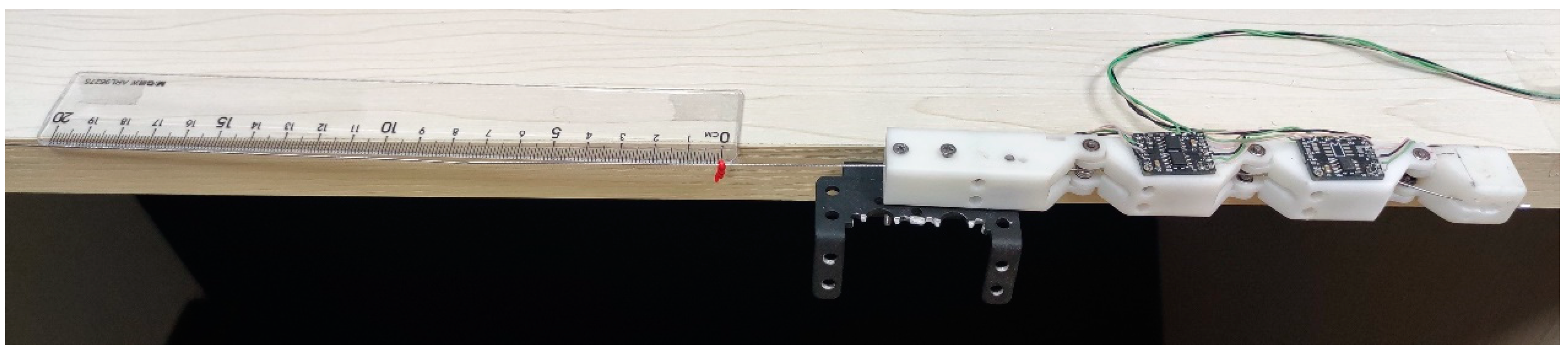
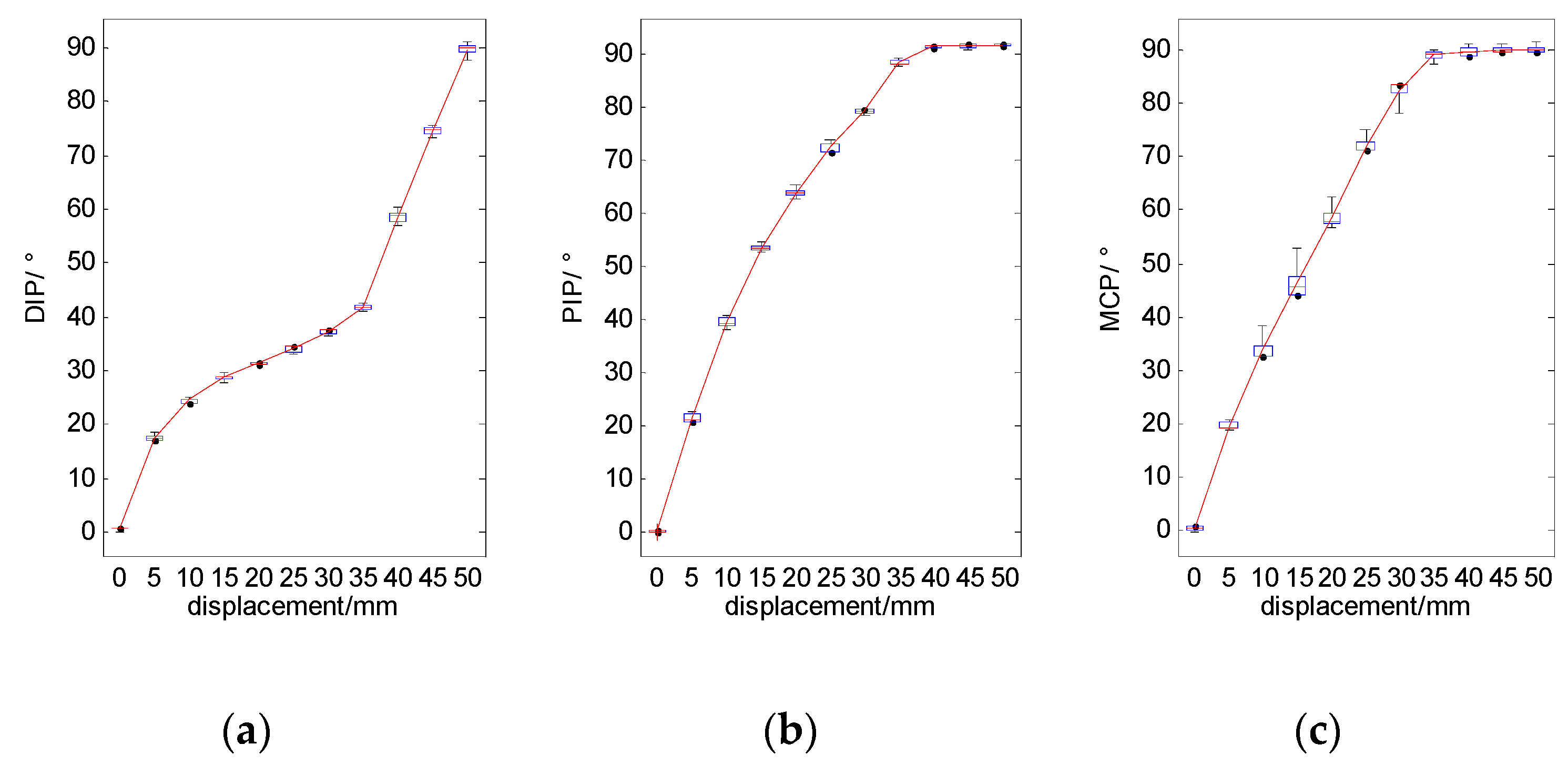
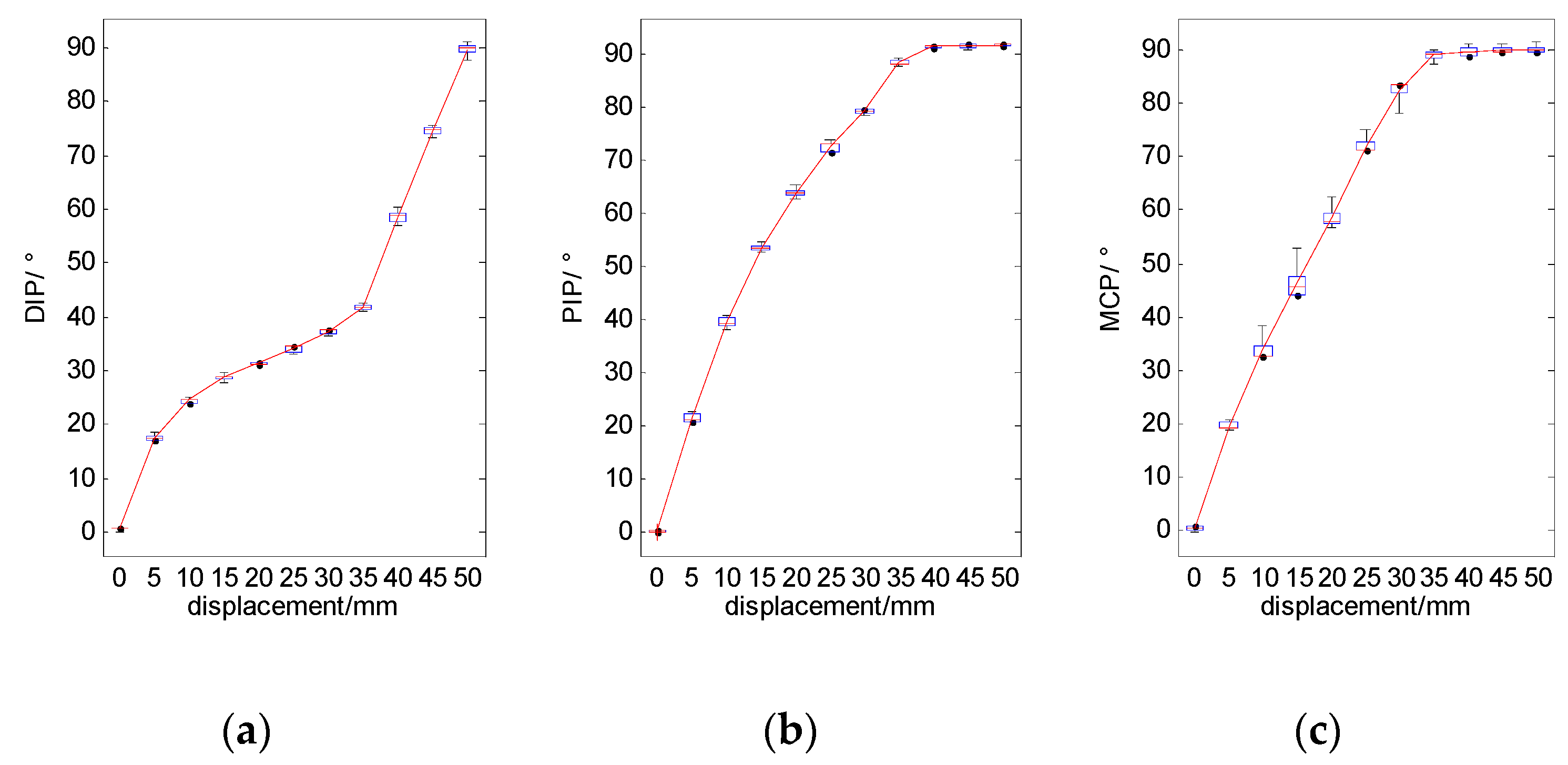
3.3. Evaluating the Relationship between Displacement of the Driving Cable and Finger Joints’ Angle
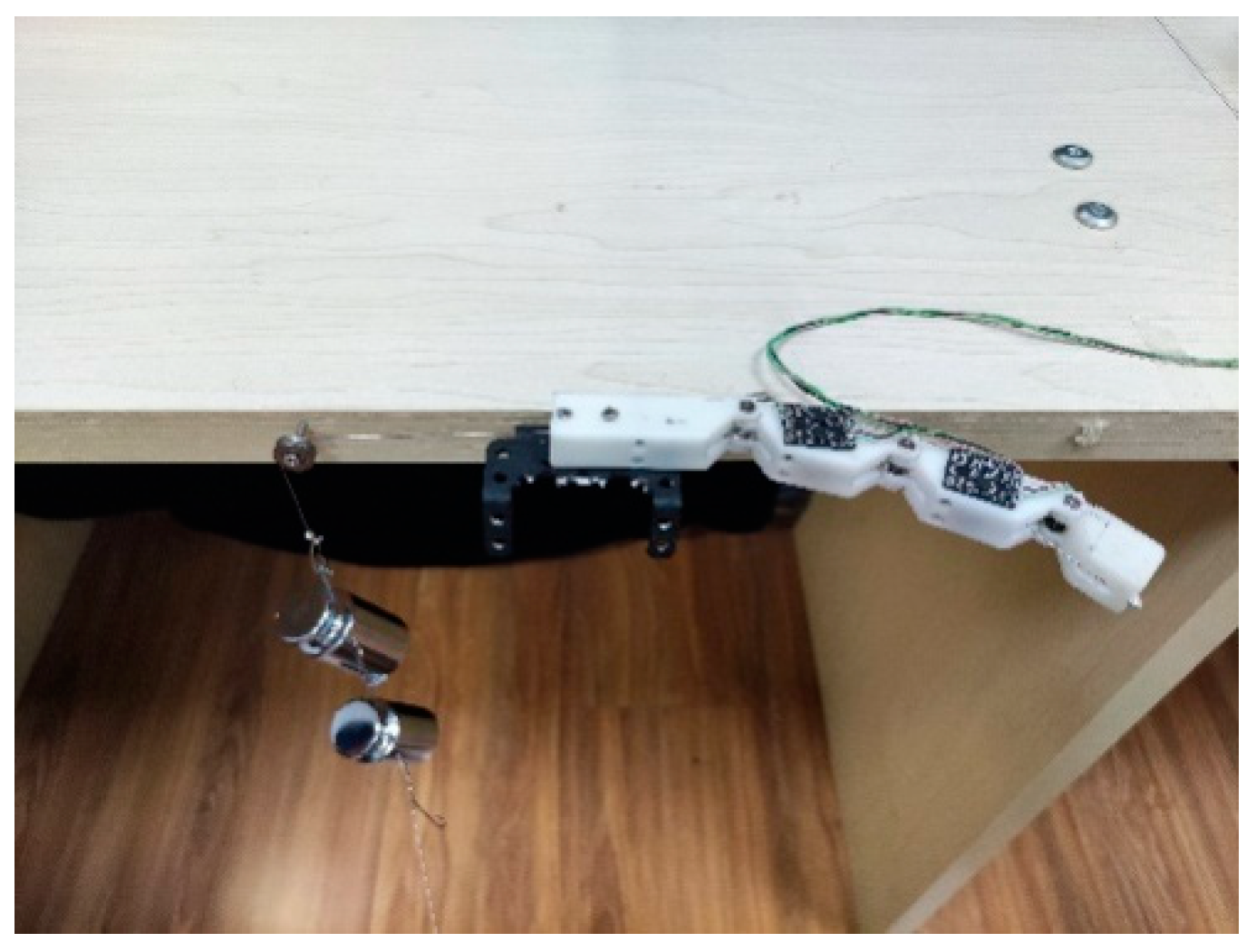
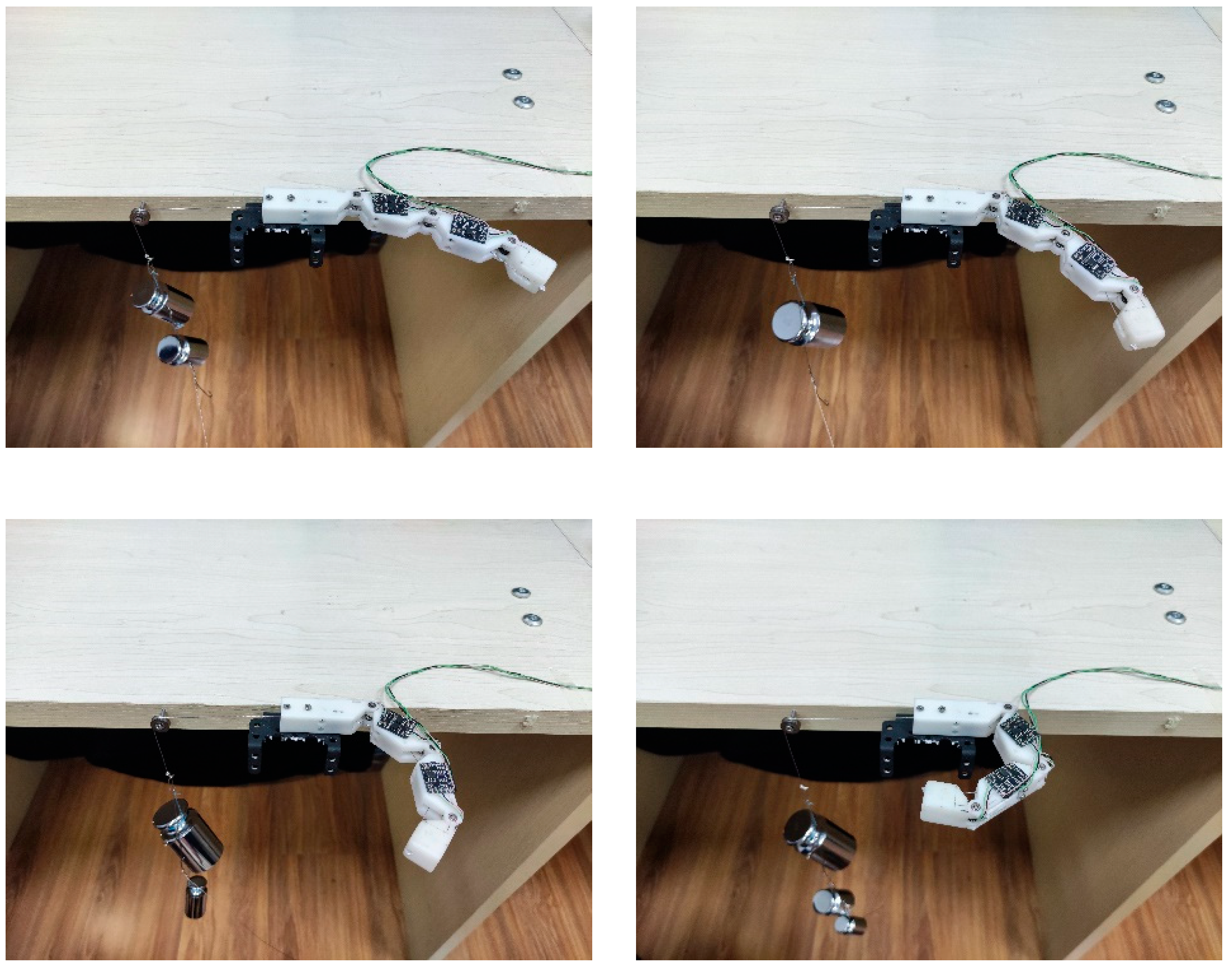
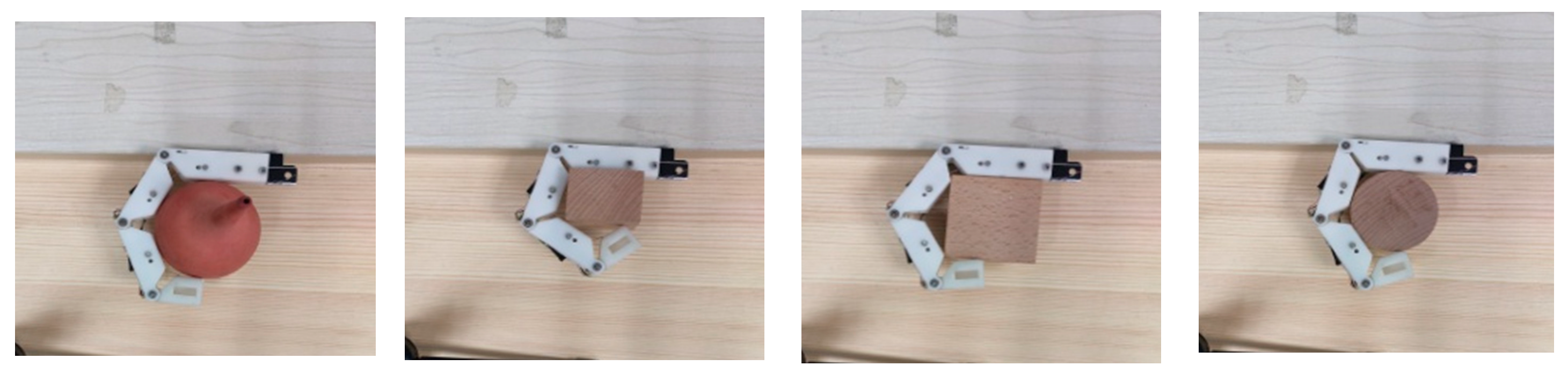
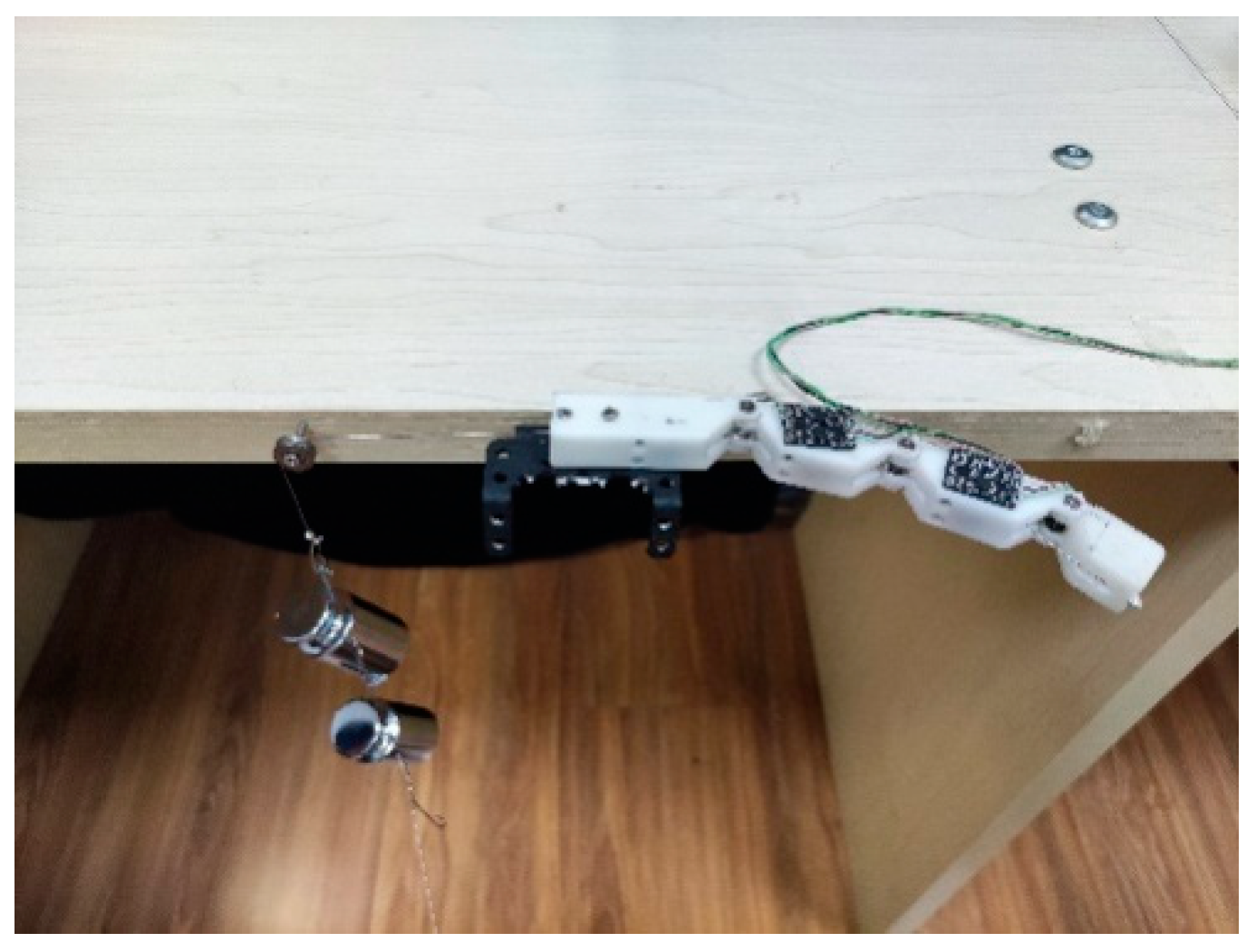
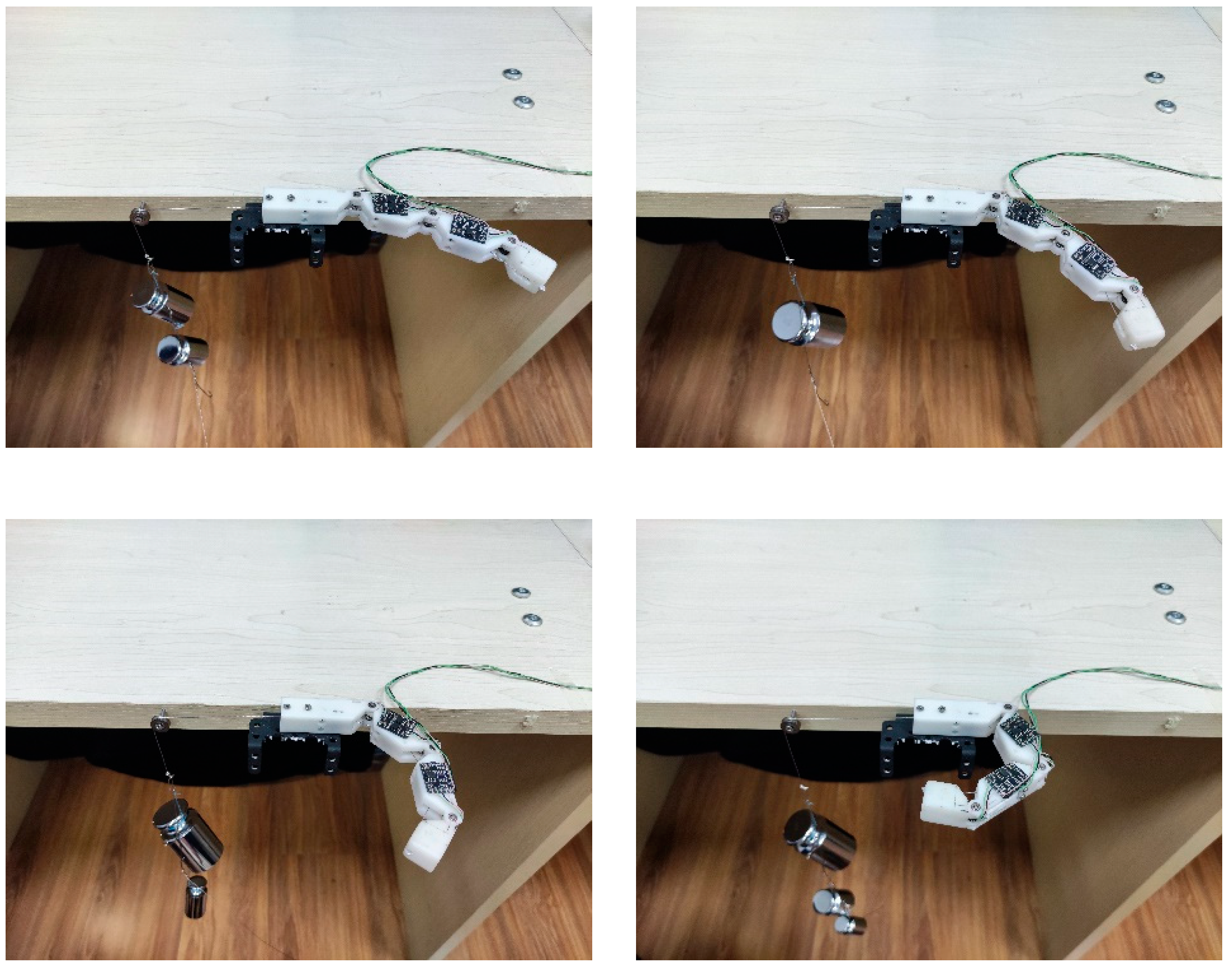
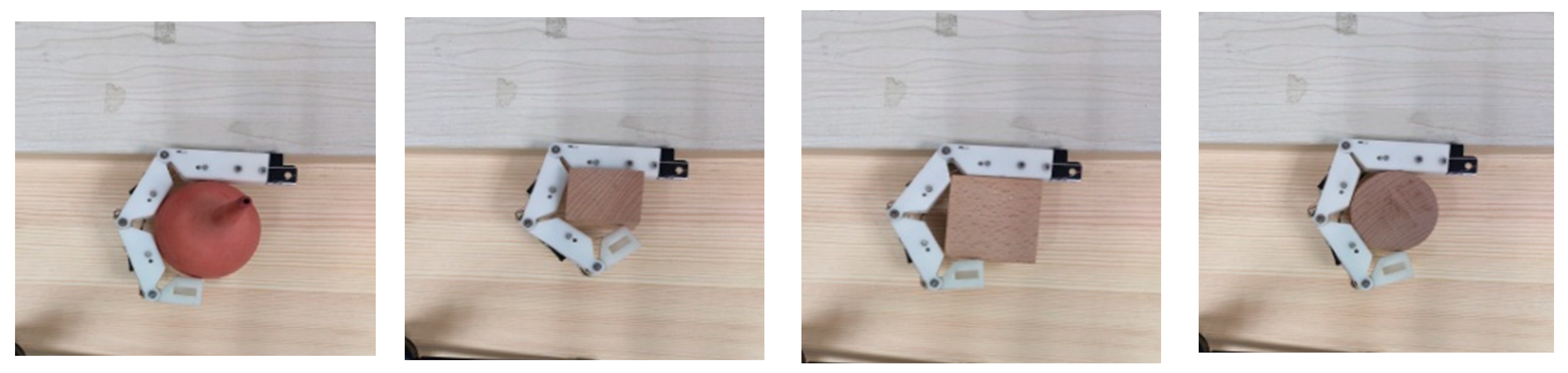
3.4. Objects’ Grasping Experiment
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ren, Z.; Kashiri, N.; Zhou, C.; Tsagarakis, N.G. HERI II: A Robust and Flexible Robotic Hand based on Modular Finger design and Under Actuation Principles. In Proceedings of the International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Ryu, W.; Choi, Y.; Choi, Y.J.; Lee, S. Development of a Lightweight Prosthetic Hand for Patients with Amputated Fingers. Appl. Sci. 2020, 10, 3536. [Google Scholar] [CrossRef]
- Wahit, M.A.A.; Ahmad, S.A.; Marhaban, M.H.; Wada, C.; Izhar, L.I. 3D Printed Robot Hand Structure Using Four-Bar Linkage Mechanism for Prosthetic Application. Sensors 2020, 20, 4174. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.; Song, A.; Zhang, H.; Feng, C. A Backstepping Control Strategy for Prosthetic Hand Based on Fuzzy Observation of Stiffness. Robot 2013, 35, 686. [Google Scholar] [CrossRef]
- Liow, L.; Clark, A.B.; Rojas, N. OLYMPIC: A Modular, Tendon-Driven Prosthetic Hand with Novel Finger and Wrist Coupling Mechanisms. IEEE Robot. Autom. Lett. 2019, 5, 299–306. [Google Scholar] [CrossRef]
- Van, D.; Bongers, R.; Sluis, C. Functionality of i-LIMB and i-LIMB pulse hands: Case report. J. Rehabil. Res. Dev. 2013, 50, 1123. [Google Scholar]
- Dang, L.; Song, J.; Wei, Y.; Zhang, W. COSA-LET finger: A novel coupled and self-adaptive robot finger with a linear empty-trip transmission. In Proceedings of the International Conference on Advanced Robotics & Mechatronics, Hefei, China, 27–31 August 2017. [Google Scholar]
- Belter, J.; Segil, J.; Dollar, A.; Weir, R.F.M. Mechanical design and performance specifications of anthropomorphic prosthetic hands: A review. J. Rehabil. Res. Dev. 2013, 50, 599. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Fan, S.; Jiang, L.; Liu, H. Design and control of a multisensory five-finger prosthetic hand. In Proceedings of the World Congress on Intelligent Control and Automation (WCICA), Shenyang, China, 29 June–4 July 2014. [Google Scholar]
- Li, X.; Wu, L.; Lan, T. A 3D-printed Robot Hand with Three Linkage-driven Underactuated Fingers. Int. J. Autom. Comput. 2018, 15, 593–602. [Google Scholar] [CrossRef]
- Liu, C.; Chen, T.; Chiu, C.; Hsu, M.-C.; Chen, Y.; Pai, T.-Y.; Peng, W.-G.; Chiang, Y.-P. Optimal Design of a Soft Robotic Gripper for Grasping Unknown Objects. Soft Robot. 2018, 5, 452–465. [Google Scholar] [CrossRef]
- Reis, M.; Leite, A.C.; Lizarralde, F. Modeling and Control of a Multifingered Robot Hand for Object Grasping and Manipulation Tasks. In Proceedings of the 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015. [Google Scholar]
- Wattanasiri, P.; Tangpornprasert, P.; Virulsri, C. Design of Multi-Grip Patterns Prosthetic Hand with Single Actuator. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1188–1198. [Google Scholar] [CrossRef] [PubMed]
- Cordella, F.; Gentile, C.; Zollo, L.; Barone, R.; Sacchetti, R.; Davalli, A.; Siciliano, B.; Guglielmelli, E. A force-and-slippage control strategy for a poliarticulated prosthetic hand. In Proceedings of the IEEE 2016 International Conference on Robotics & Automation, Stockholm, Sweden, 16–21 May 2016; pp. 3524–3529. [Google Scholar]
- Palli, G.; Vassura, G.; Scarcia, U.; Moriello, L.; Berselli, G.; Cavallo, A.; de Maria, G.; Natale, C. The DEXMART hand: Mechatronic design and experimental evaluation of synergy-based control for human-like grasping. J. Robot. Res. 2014, 33, 799–824. [Google Scholar] [CrossRef]
- Fourie, R.; Stopforth, R. The mechanical design of a biologically inspired prosthetic hand, the touch hand 3. In Proceedings of the IEEE 2017 Pattern Recognition Association of South Africa and Robotics and Mechatronics, Bloemfontein, South Africa, 30 November–1 December 2017; pp. 38–43. [Google Scholar]
- Wu, C.; Fei, F.; Xie, M.; Cao, Q.; Yang, D.; Zeng, H.; Xu, B.; Song, A. Mechanical-Sensor Integrated Finger for Prosthetic Hand. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Kuala Lumpur, Malaysia, 12–15 December 2018. [Google Scholar]
- Venter, J.; Mazid, A. Tactile sensor based intelligent grasping system. In Proceedings of the IEEE International Conference on Mechatronics, Churchill, Australia, 13–15 February 2017. [Google Scholar]
- Luberto, E.; Wu, Y.; Santaera, G.; Gabiccini, M.; Bicchi, A. Enhancing Adaptive Grasping Through a Simple Sensor-Based Reflex Mechanism. IEEE Robot. Autom. Lett. 2017, 2, 1664–1671. [Google Scholar] [CrossRef]
- Wookeun, P.; Kyongkwan, R.; Suin, K.; Joonbum, B. A Soft Sensor-Based Three-Dimensional (3-D) Finger Motion Measurement System. Sensors 2017, 17, 420. [Google Scholar]
- Othman, A.; Hamzah, N.; Hussain, Z.; Baharudin, R.; Rosli, A.D.; Ani, A.I.C. Design and development of an adjustable angle sensor based on rotary potentiometer for measuring finger flexion. In Proceedings of the IEEE International Conference on Control System, Batu Ferringhi, Malaysia, 25–27 November 2016. [Google Scholar]
- Hofmann, U.A.T.; Bützer, T.; Lambercy, O.; Gassert, R. Design and Evaluation of a Bowden-Cable-Based Remote Actuation System for Wearable Robotics. IEEE Robot. Autom. Lett. 2018, 3, 2101–2108. [Google Scholar] [CrossRef]
- Jeong, U.; Cho, K.-J. A feasibility study on tension control of Bowdencable based on a dual-wire scheme. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Autom, Singapore, 29 May–3 June 2017; pp. 3690–3695. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | ai−1 | αi−1 | di | θi | Range |
|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | |
| 1 | L0 | 0 | 0 | θ1 | 0–π/2 |
| 2 | L1 | 0 | 0 | θ2 | 0–π/2 |
| 3 | L2 | 0 | 0 | θ3 | 0–π/2 |
| Parameter | Value (mm) | Description |
|---|---|---|
| L0 | 57 | Length of the ith phalange, i = 0, 1, 2 and 3 represents the metacarpal, proximal phalange, intermediate phalange and distal phalange, respectively. |
| L1 | 46.5 | |
| L2 | 46.5 | |
| L3 | 23.25 | |
| 5 | Length of the torsion springs’ leg. li represents the length of spring’s leg on the side of the ith phalange. represents the length of spring’s leg on the side of the (i − 1)th phalange. | |
| 5 | ||
| 5 | ||
| 5 | ||
| 4 | ||
| 5 | ||
| 23.25 | In the x0 direction, the distance between the pulley and the shaft. | |
| h | 3 | In the y direction of each phalange, the distance between the pulley and the shaft. |
| d3 | 10 | In the y3 direction, the distance between the wire rope fixed point and the shaft. |
| Parameter | Value |
|---|---|
| Length (mm) | 3.6 mm |
| Width (mm) | 3.1 mm |
| Resistance (Ω) | 350 |
| Sensitivity factor | 2.0 ± 1% |
| Strain limit (um/m) | 20,000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, C.; Song, T.; Wu, Z.; Cao, Q.; Fei, F.; Yang, D.; Xu, B.; Song, A. Development and Evaluation of an Adaptive Multi-DOF Finger with Mechanical-Sensor Integrated for Prosthetic Hand. Micromachines 2021, 12, 33. https://doi.org/10.3390/mi12010033
Wu C, Song T, Wu Z, Cao Q, Fei F, Yang D, Xu B, Song A. Development and Evaluation of an Adaptive Multi-DOF Finger with Mechanical-Sensor Integrated for Prosthetic Hand. Micromachines. 2021; 12(1):33. https://doi.org/10.3390/mi12010033
Chicago/Turabian StyleWu, Changcheng, Tianci Song, Zilong Wu, Qingqing Cao, Fei Fei, Dehua Yang, Baoguo Xu, and Aiguo Song. 2021. "Development and Evaluation of an Adaptive Multi-DOF Finger with Mechanical-Sensor Integrated for Prosthetic Hand" Micromachines 12, no. 1: 33. https://doi.org/10.3390/mi12010033
APA StyleWu, C., Song, T., Wu, Z., Cao, Q., Fei, F., Yang, D., Xu, B., & Song, A. (2021). Development and Evaluation of an Adaptive Multi-DOF Finger with Mechanical-Sensor Integrated for Prosthetic Hand. Micromachines, 12(1), 33. https://doi.org/10.3390/mi12010033