1. Introduction
Energy harvesting by piezoelectric materials has attracted lots of interests during the last years due to its high power density and architectural simplicity [
1]. Piezoelectric materials are generally used in the vibration based energy harvesting specially at small scales [
2]. Among different types of structures which have been developed to scavenge the energy from the ambient vibrations sources [
3,
4,
5,
6,
7], the conventional and still widely used configuration in this case is cantilever based piezoelectric energy harvester which is deeply investigated in several researches by Erturk et al. [
8,
9,
10,
11]. In order to maximize the harvested energy from a piezoelectric cantilever beam, previous works considered geometry and parameters optimization on the piezoelectric cantilever beam [
12,
13,
14,
15,
16] by using topology optimization [
17] or by using interval techniques [
18], or added a tip attachment as a proof mass to match the fundamental natural frequency of the beam to the excitation frequency [
19,
20]. However, in some applications with high excitation frequencies like automotive engines, industrial machinery or micro dimension applications the excitation frequency can exceed the fundamental natural frequency of the beam. Then, the best location for the attachment to have maximum piezoelectric voltage may not be the tip of the beam due to vibrational mode shapes. For this case, Erturk et al. [
21] investigated the higher modal energy harvesting with a unimorph beam without attachment while the possibility of having the attachment in-span of the beam can be considered. On the other hand, studies on energy harvesting from high frequency excitation with having the mass in-span of the cantilever beam received a restricted attention. Researches in this area did not consider modelling [
22] or the piezoelectric electromechanical coupling effect [
23]. Furthermore, in all of the researches mentioned above, attached mass on the beam is modelled as a lumped mass and the effects of mass moment of inertia on the harvested energy are not investigated.
In piezoelectric cantilever configuration, it is usual to have piezoelectric layers which cover the whole beam from clamped side to free end [
9,
10,
24,
25,
26]. This configuration is mostly convenient for the microscale dimensions. However, in the mesoscale dimensions this configuration suffers from low power density since the most strain occurs close to the clamped side [
4]. Besides, in excitation frequency close to higher vibrational modes, charge cancellation may happens and continuous electrodes should be avoided [
21]. Because of these reasons some researches prefer to have a piezoelectric patch mounted to a passive (non-piezoelectric) beam with the length of the piezoelectric patch being smaller than that of the beam [
4,
19,
27,
28]. Generally, in these cases, the piezoelectric patch are mounted near to clamped side of the beam to take the advantage of the maximum strain. However, for excitation frequencies higher than the first natural frequency, again the clamped side may not be the best place for the piezoelectric patch.
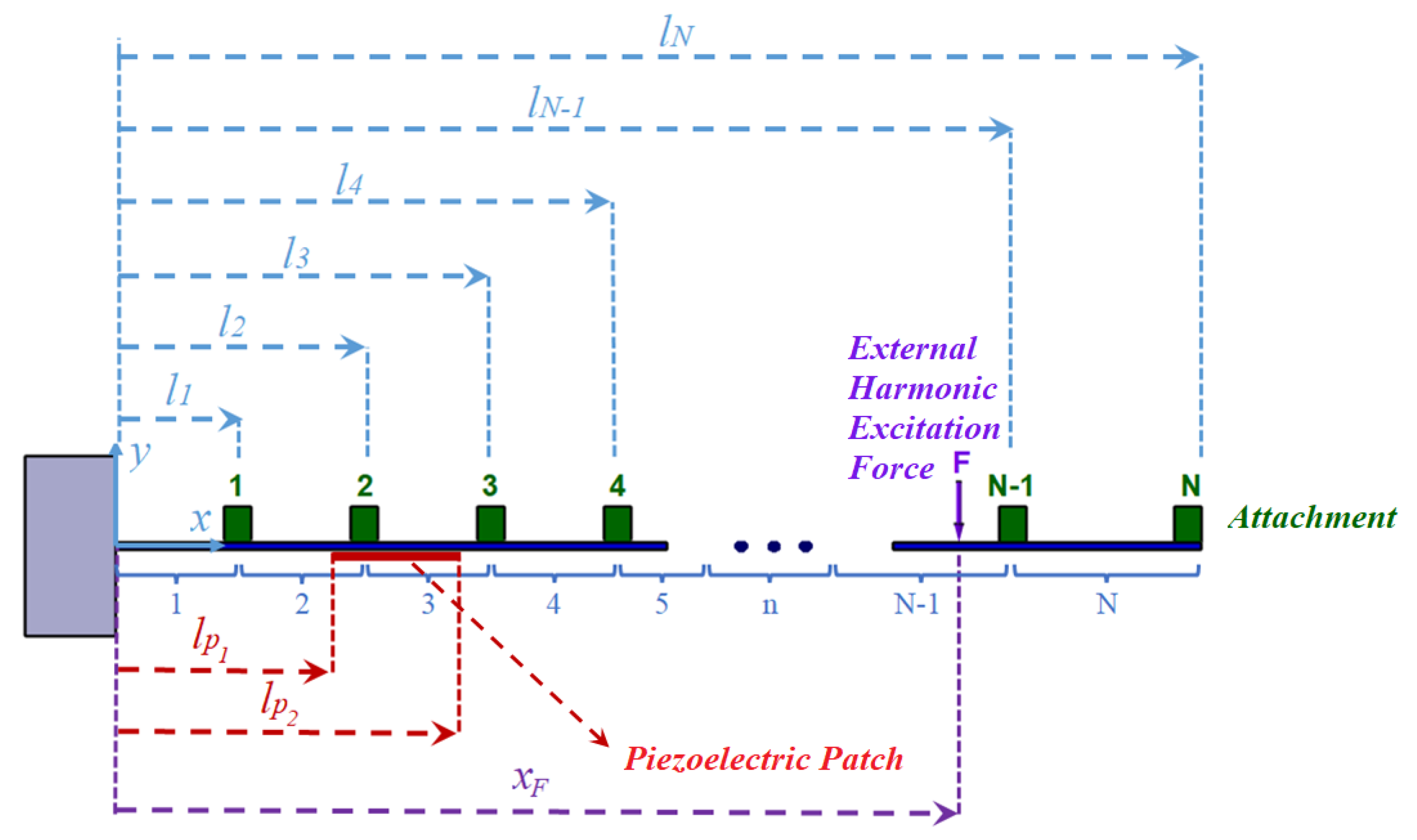
In this paper, for a general case of a given passive cantilever beam with mounted piezoelectric patch and several in-span attachments as shown in
Figure 1, the voltage amplitude of the piezoelectric patch is found by analytical approach by extending the existing vibrational analysis in the literature [
29,
30,
31,
32]. In this vibrational analysis, the method of sectioning the beam between the attachments are utilized to find the response of the beam due to excitation. As such, the model proposed for the voltage amplitude is general for any number of attachment. On the other hand, in order to optimize the harvested energy from an external source of vibration, optimization is applied on a particular case of a beam with one in-span attachment. The derived equation for piezoelectric voltage is used as objective function of the optimization algorithm. In this case, the employed optimization variables are: attachment mass, attachment mass moment of inertia, attachment location, piezoelectric patch location and external force location. In order to deal with this multi parameter optimization, genetic algorithm (GA) is used. However the attachment parameters do not appear in the voltage equation while affecting the natural frequencies. To handle this, one can use the Rayleigh’s quotient method to calculate the fundamental natural frequency of a cantilever beam with one in-span attachment analytically [
33]. But, for higher natural frequencies the Rayleigh’s quotient method is almost impossible to be used since there is no information about the shape functions of the beam for higher modes and using polynomial function as shape function [
34] can produce significant error especially with in-span attachment on the beam. Therefore, here a two steps optimization is suggested.
First, a multi-layer perceptron (MLP) neural network is trained in order to obtain approximate functions for the natural frequencies based on the attachment parameters. Second, the trained network is used in the evaluation process of the genetic algorithm to form a neural network based genetic algorithm which can find the best combination of the optimization variables to match one of the natural frequencies of the beam to the excitation frequency and maximize the piezoelectric voltage. Both GA and MLP are already explored in the literature. However, utilization of MLP in the evaluation process of the GA has two advantages: first, it can increase the speed of GA algorithm significantly which is a known bottleneck of the GA algorithm in the literature. The second advantage is that MLP can have very high accuracy in calculation of the natural frequencies if the training data is sufficient. These advantages will be explained in details in the text.
To validate the analytical modelling and proposed optimization method of this paper, commercial finite element software COMSOL Multiphysics (COMSOL, Inc., Burlington, NJ, USA) is used. The performance of optimization method in matching the natural frequency of the structure with the excitation frequency is also assessed.
The rest of the paper is organized as follows—in
Section 2, vibrational analysis is performed and the piezoelectric voltage due to external excitation is found. In
Section 3, first, neural network fitting approach and genetic algorithm are described separately, then their combination in maximizing the voltage amplitude based on the excitation frequency is presented.
Section 4 is devoted to simulation results in which the piezoelectric voltage from the proposed approach is compared with conventional method in the literature. Finally, conclusions are discussed in
Section 5.
2. Modelling
For a beam with several in-span attachments and a piezoelectric patch which is mounted on the beam as shown in
Figure 1, the regular method for deriving the equation of motion in transverse vibration is to separate the beam between the attachments. In this case, the equations of motion for each section by considering electrical coupling is in the following form [
9]:
In (
1),
is the transverse displacement,
n is the number of each segment,
is the flexural rigidity of the beam,
is the mass per unit length,
C is the damping constant,
is the external force,
is the application location of the external force and
is the Dirac delta function. The coupling term
which comes from the electrical circuit can be written as [
9],
where,
is the flexural rigidity of the piezoelectric patch,
is the piezoelectric coupling coefficient,
and
are piezoelectric thickness and width respectively while
is the beam thickness.
is the distance from the top of piezoelectric layer to the neutral axis. It should be noted that the term
specifies the end points of the piezoelectric patch on the beam; and for the sections of the beam where there is no piezoelectric patch, this term is equal to zero. This term is due to the fact that induced voltage in the piezoelectric patch generates point moments at its boundaries which affects the mechanical response of the beam.
Now, to find the piezoelectric voltage due to external mechanical excitation, the response of partial differential Equation (
1) should be found. It is worthwhile to mention that the thickness and length of the piezoelectric patch is much less than the beam. As such the rigidity of the piezoelectric patch is negligible in comparison to the beam. In addition, the effects of the attachment’s geometry on the beam’s structural dynamic are highly superior to the effects of the piezoelectric patch geometry. Therefore, in the following modal analysis of the beam, the geometry of the piezoelectric patch is neglected in comparison to the beam and attachment.
2.1. Free Vibration Analysis
By following the Ansatz separation, solution of (
1) is expressed in the following form:
is the mode shape of the beam and
is the generalized time-dependent coordinate which satisfies
In (
4),
is the natural frequency of the system. In order to find the natural frequencies and mode shapes of the beam with several in-span attachments, the external force and damping constant in (
1) are considered to be zero. As such, the equations of motion for each segment of the beam in short circuit condition (
) is converted to the following eigenvalue problem [
35,
36]:
Now based on (
5), the exact solution for the eigenfunctions which are the mode shapes of the beam, is in the following form [
35,
36]:
in which,
In (
6),
,
,
and
are unknown constants that can be found by applying proper boundary and continuity equations. The clamped end boundary condition is written in the following form:
For the attachment point of each segment, the continuity of deformations and equilibrium of forces and moments can be written as
is the mass of the attachment and
is the related moment of inertia of the attachment. Finally, for the free end with attachment, boundary conditions are
By applying (
8)–(
10) to (
6), the following characteristic equation is formed:
where
is the characteristic matrix which is the function of
. On the other hand,
is a function of
based on the explicit expression mentioned in (
7). In (
11),
is the matrix of the mode shapes constants,
To find the nontrivial solution of (
11), the determinant of the characteristic matrix
should be zero which forms the frequency equation and numerical approach should be used to find the natural frequencies. On the other hand, by setting the determinant of characteristic matrix to zero, characteristic Equation (
11) will become undetermined. In this case, by integrating the normalization condition, the set of equations become solvable and the coefficients in vector
are found. In this method, orthogonality condition can be used to find the perfect normalization. The generalized orthogonality condition which results in a decoupled ODE of motion for a beam with in-span attachments is expressed in the following form [
31,
32]:
This orthogonality condition has a companion form as,
In (
13) and (
14),
and
are the numbers of mode. Now, based on (
13), the normalization condition can be written for the case when
and in this case the right hand side of (
13) is equal to 1. After integrating the normalization condition to the set of (
8)–(
10), the coefficients in vector
in (
12) are found and the mode shapes can be found for each natural frequencies. Then, the displacement for each point of the beam with considering the beam segments can be found by using the expansion theorem in the following form:
2.2. Forced Vibration Analysis
By substituting (
15) in (
1) and multiplying each side of the equation by
and integrating over the length of the section, the following equation is derived:
Equation (
16) is true for each section of the beam. By summing these equations for all sections in the entire length of the beam, the following familiar form of ordinary differential equation (ODE) of motion is derived:
in which,
In (
17),
is the element of the mass matrix,
is the element of the damping matrix,
is the element of the stiffness matrix,
is the modal vector’s element of external forces,
is the vector of the electromechanical coupling voltage,
is the vector of the time dependent coordinates and
H is the Heaviside function. Now, by applying the orthogonality conditions and normalization in (
13) and (
14), the mass and stiffness matrices can be rewritten in the following form:
where
is the Kronecker delta symbol. Based on (
25), mass and stiffness matrices are diagonal while the damping matrix is not. For solving the equation of motion in (
17) analytically, it is better to have a set of decoupled ODE which is impossible with non-diagonal damping matrix. However, the damping of a system is a model parameter and it is not a physical parameter [
31]. Therefore, it is possible to assume a modal damping matrix for the system in the following form:
where
is the modal damping constant. It is possible to define the numerical value for this modal damping constant by using the Rayleigh damping theory which is common in the Finite Element Method (FEM) software. The Rayleigh damping can be defined as
where
,
are the Rayleigh’s damping coefficients. By substituting (
25) and (
26) in to (
27), the modal damping can be calculated as
Now, by considering diagonal damping matrix, the decoupled set of ODE of motion can be written in the following form:
in (
29) is found by the electrical circuit equation with mechanical coupling as follows [
9]:
and
In (
30),
is the resistive load,
is the piezoelectric length,
is the piezoelectric permittivity constant at constant strain by assuming plan-stress assumptions and
is the distance of the piezoelectric patch center in thickness direction to the neutral axis. In order to solve (
30) and (
29) first, external harmonic force is modelled by
, where
is the excitation frequency. By considering a linear electromechanical system, the response of
is also harmonic in terms of
while
and
are the amplitudes of the voltage and external force respectively. Now, the particular solution of non-homogeneous differential equation in (
29) is:
By substituting (
32) in (
30) the following equation for voltage amplitude is derived:
in which,
is the time constant of the electrical circuit. The voltage equation in (
33) is similar to one which is reported by Erturk et al. [
9]. However, the difference lies on calculating the natural frequencies (
) and mode shapes (
) which are based on modal analysis of a beam with in-span attachments. After finding the amplitude of voltage, the displacement of each point of the beam with the help of (
15) and (
32) can be found by the following equation:
As can be seen in (
33), voltage amplitude is a complex number which has an absolute value and a phase angle. In the framework of this paper, just the absolute value is important for optimization.
3. Optimization
It is desired to have the maximum possible of piezoelectric voltage amplitude in (
33) for any excitation frequency. The geometrical optimization on the beam and piezoelectric has been studied before [
12,
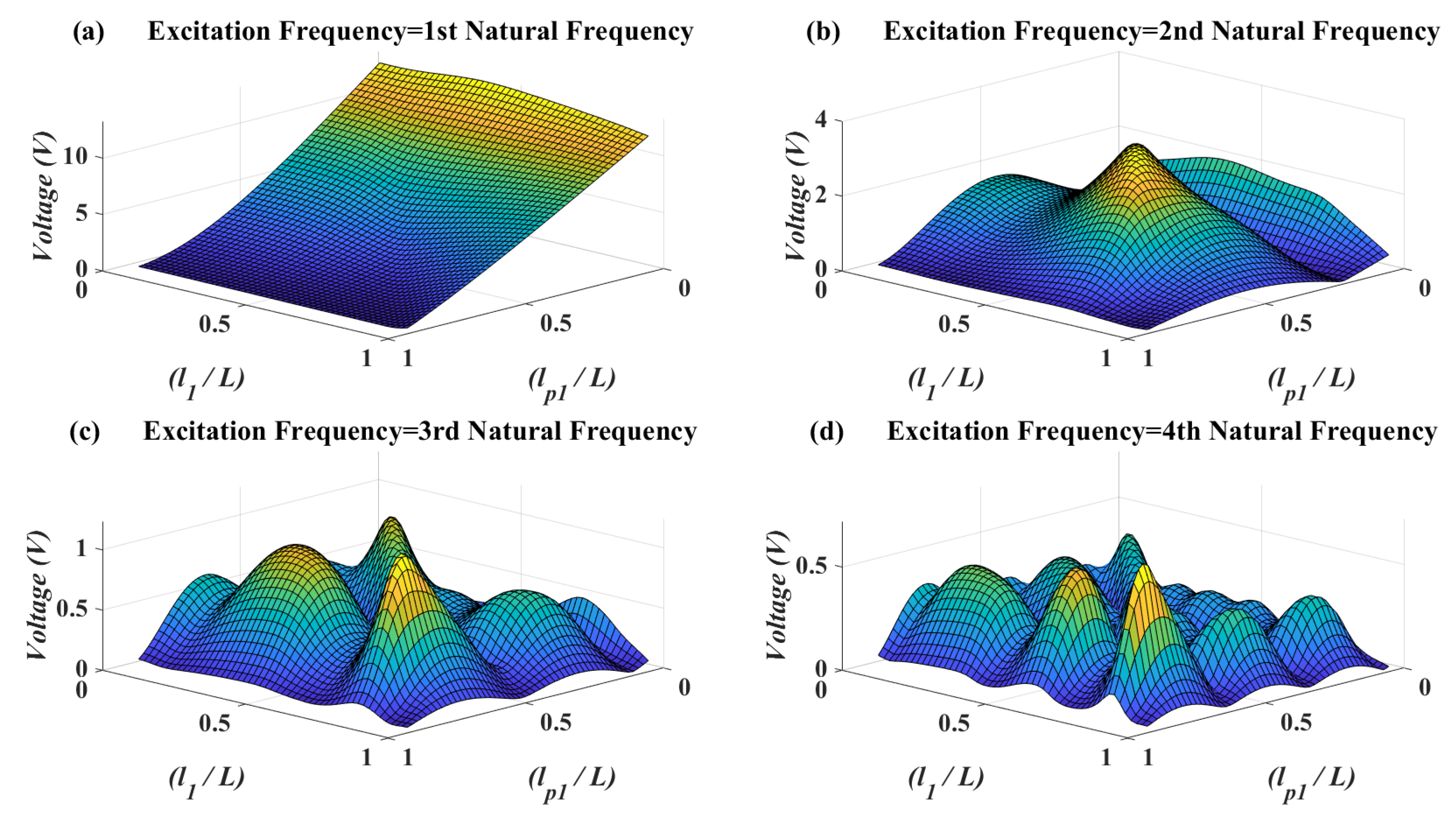
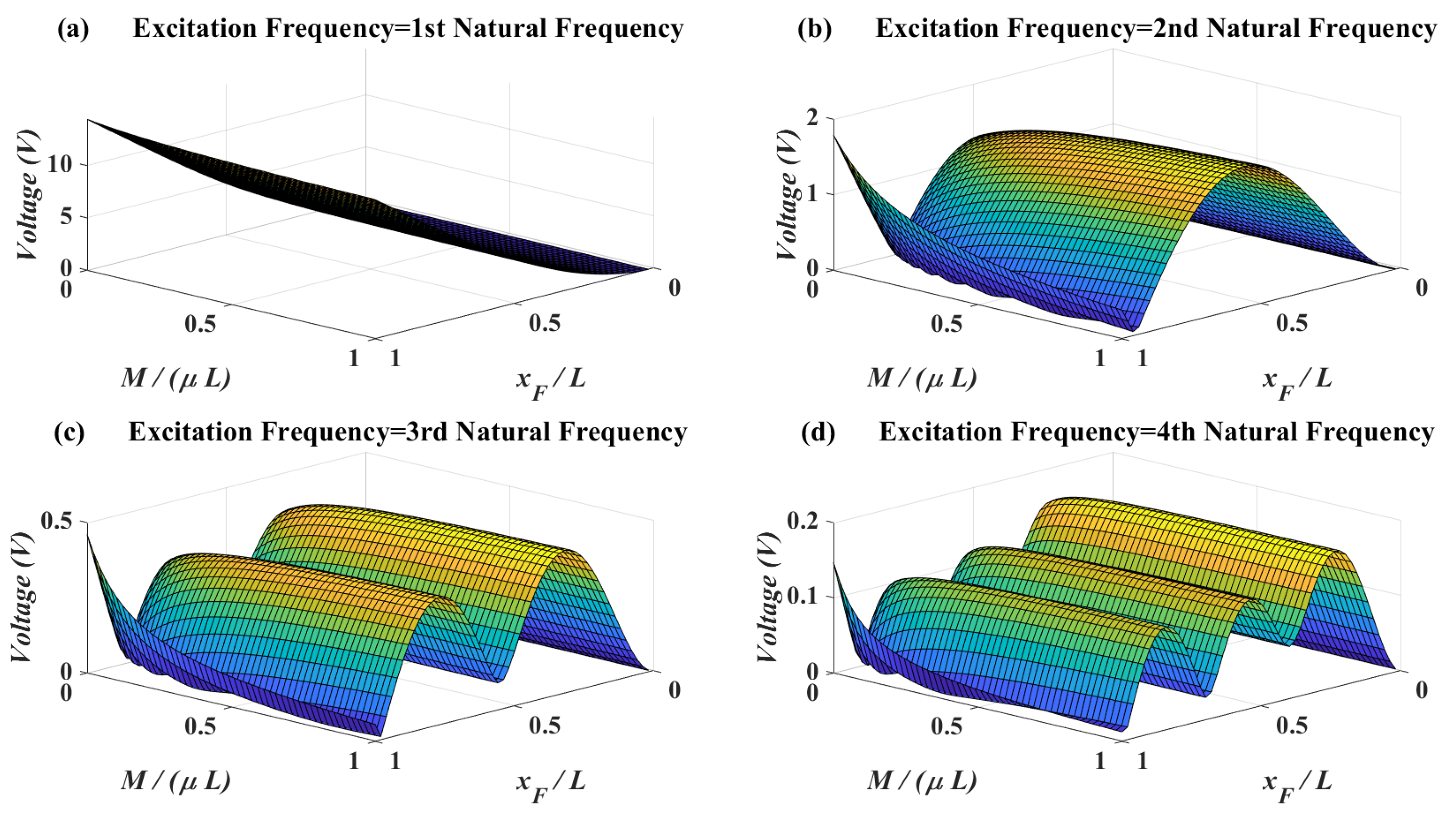
37]. Therefore, by considering constant geometrical parameters for beam and piezoelectric patch and considering just one attachment on the beam, the optimization variables that can influence the voltage amplitude in (
33) are piezoelectric patch location (
), force location (
), attachment location (
), attachment mass (
M) and attachment mass moment of inertia (
J). Among these optimization variables, force location and piezoelectric patch location directly appear in the voltage amplitude (
33). However, the other three optimization variables related to attachment do not directly appear in the voltage amplitude. Instead, they affect the continuity conditions in (
9), and only these latter affect the characteristic matrix in (
11) which itself affects the natural frequencies and mode shapes that appear in the voltage amplitude (
33). On the other hand, there is no closed form expression between the natural frequencies and the attachment parameters. In fact, there is just closed form expression for first (fundamental) natural frequency of the beam with in-span attachment based on the Rayleigh’s quotient method [
33]. But, for higher natural frequencies the Rayleigh’s quotient method cannot be used since there is no information about the shape functions without knowing the natural frequencies. As such, performing optimization based on the attachment parameters is a challenge that will be addressed in the next section.
3.1. Multi Layer Perceptron Neural Network
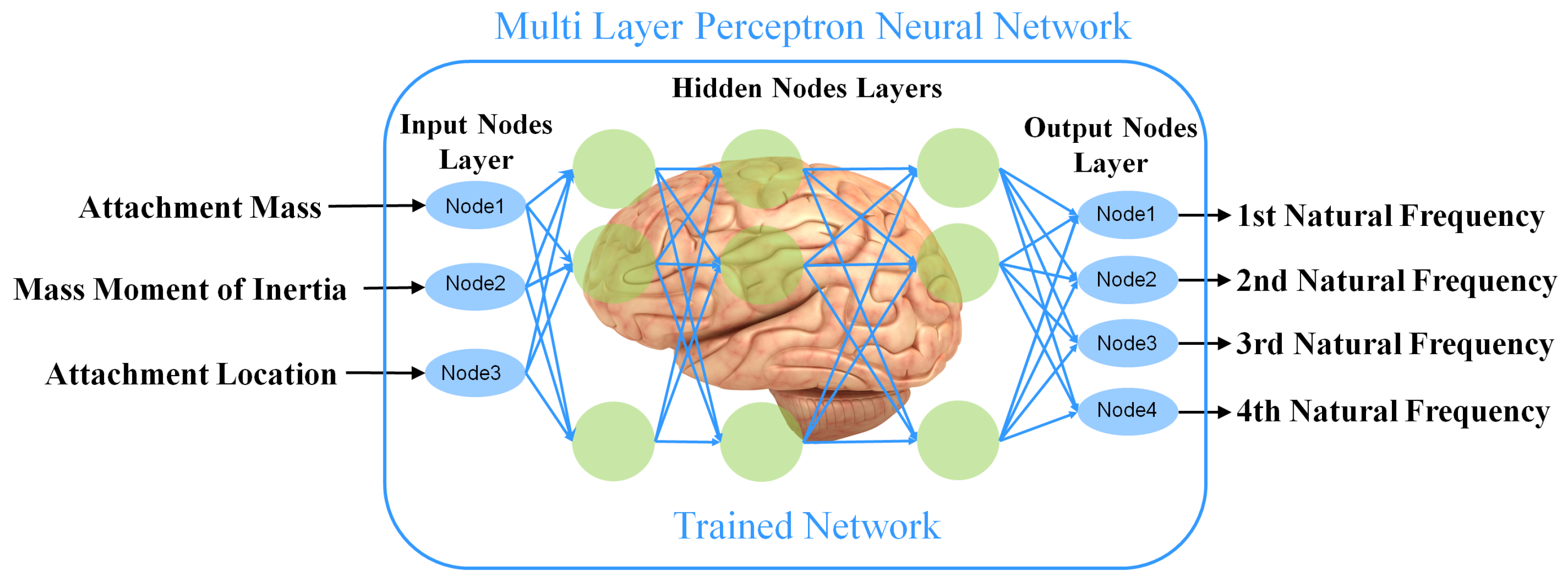
In this section, neural network fitting algorithm in MATLAB software is utilized for the purpose of finding approximate functions for the natural frequencies based on the optimization variables. The algorithm is based on the multi-layer perceptron (MLP) which is a class of artificial neural network. MLP consists three layers of artificial neurons—input layer, output layer and hidden layers. There is just one input layer and one output layer in the MLP network and the number of neurons in input and output layers are equal to the number of input and output variables. However, there can be different numbers of hidden layers in MLP and the main method to increase the performance of the MLP is to define the adequate number of hidden layers which can be done with the trial and error approach.
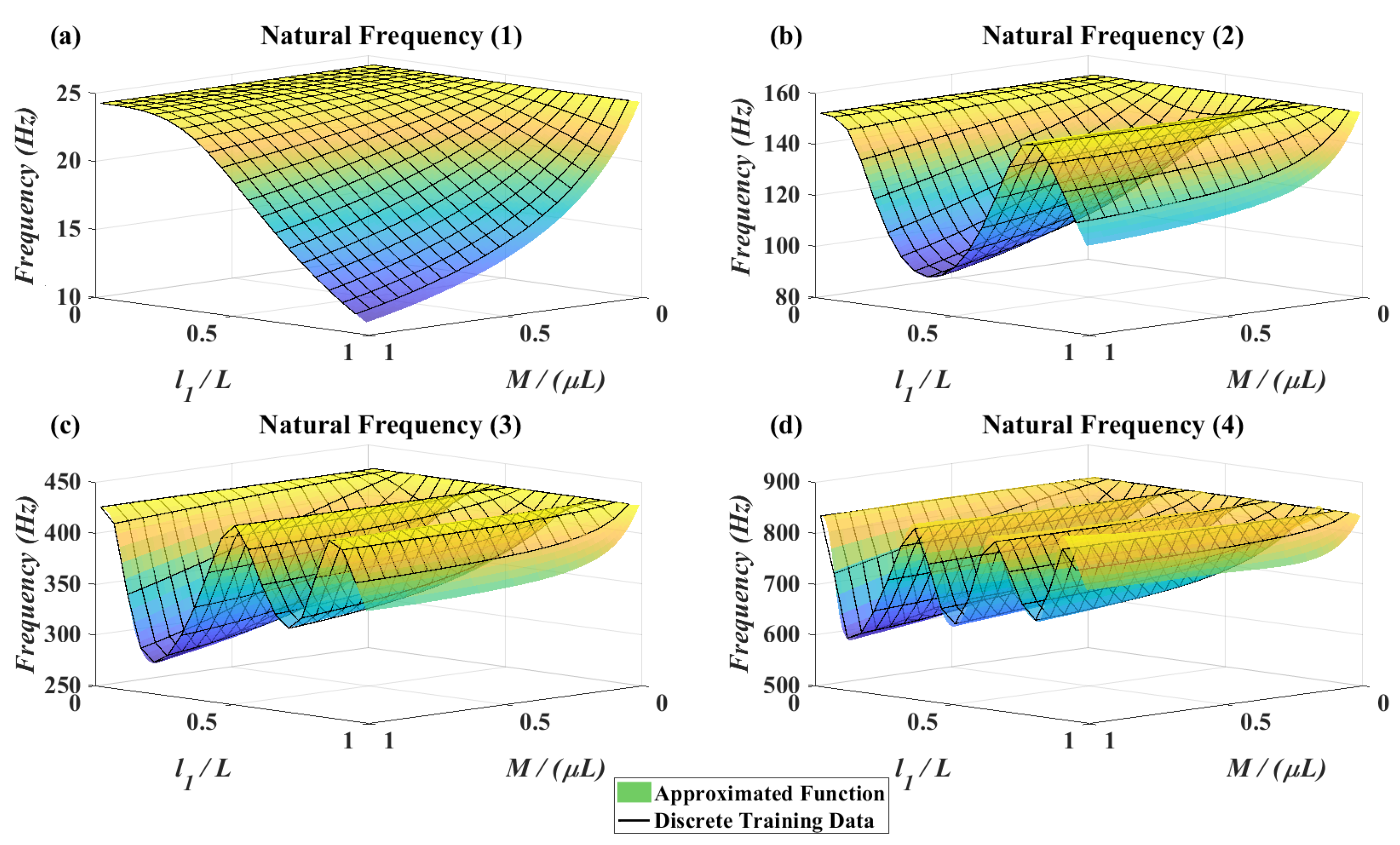
Having this background, it is now desired to have a MLP network that can get attachment parameters and gives the natural frequencies. To do so, the MLP network should be trained with the training data which consist of input data and target data. Input data are optimization variables regarding the attachment including attachment location, attachment mass and attachment mass moment of inertia. Target data consist of natural frequencies related to the input data. In this paper maximum number of natural frequencies and mode shapes for modal analysis is considered to be 4 which is sufficient enough to model a cantilever even under high excitation frequencies. Therefore, each set of input data consists of 3 optimization variables, which has a set of target data consist of 4 natural frequencies.
The MLP network should have the ability to get any combination of the attachment parameters and give the related natural frequencies. To form the training data for this MLP network, 20 different attachment masses in the domain of (
), 20 different attachment mass moments of inertia in the domain of (
) and 20 different attachment locations in the domain of (
) have been chosen to form 8000 combinations of attachment parameters. For each of these combinations, there are 4 natural frequencies which should be found by the numerical approach on the characteristic matrix in (
11). Therefore, input training data is a matrix with 3 rows and 8000 columns while the target data is a matrix with 4 rows and 8000 columns. Number of hidden layers is 50 and the Bayesian Regularization method has been used to train the network.
After successful training of the network by obtaining natural frequencies for finite set of variables, a continuous function is approximated as a black box which can get any variable in the predefined domain and gives the related natural frequencies immediately as shown in
Figure 2 and it is not necessary to calculate the natural frequencies by numerical approach on the characteristic matrix in Equation (
11). This will boost the speed in the evaluation procedure of the GA optimization which will be discussed later.
3.2. Finding Analytical Expression for Mode Shape Constants
By using MLP neural network, the natural frequencies in (
33) are found as functions of the attachment parameters. But, in voltage amplitude (
33), mode shapes are also functions of the attachment parameters since attachment parameters affect the continuity (
9) and mode shapes constants in (
12). Finding analytical expressions for the mode shape constants based on (
8)–(
10) are almost impossible due to huge size of the expression for each of the constants. Alternative approach proposed by Naguleswaran [
36,
38] is used here to decrease the number of the unknown constants in (
12).
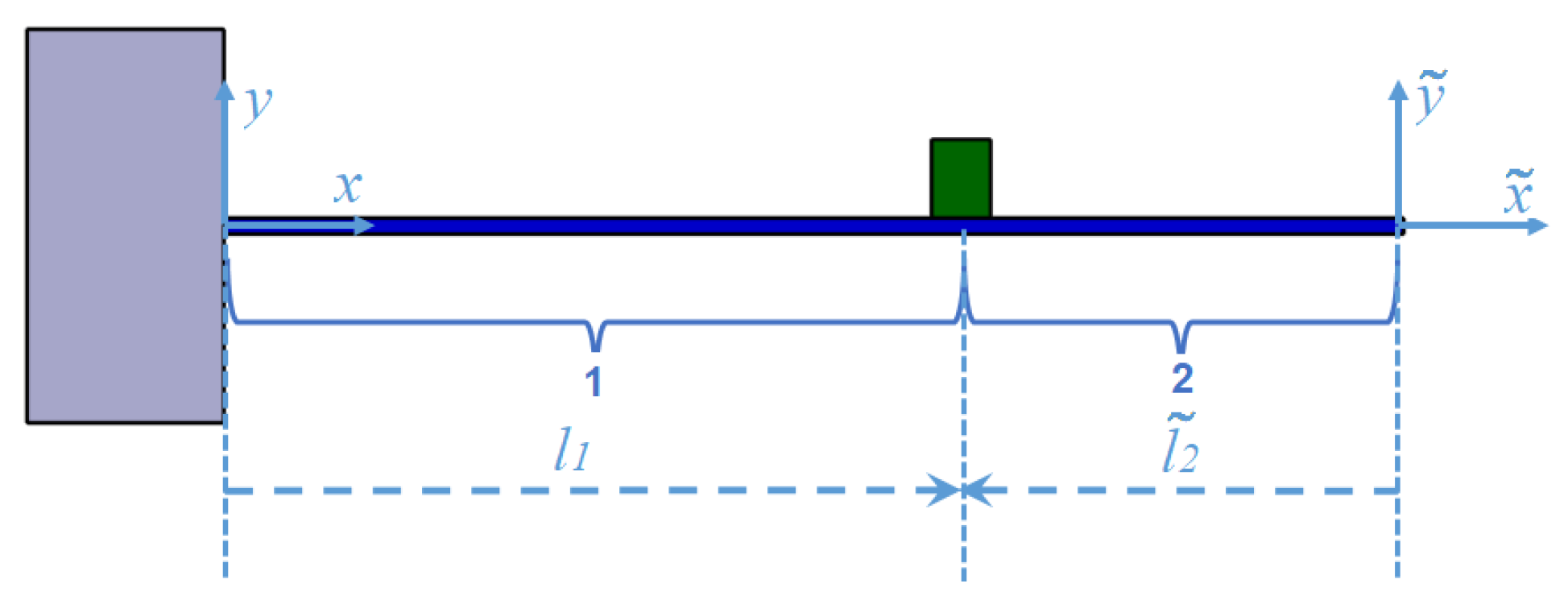
For the case when the beam has just one in-span attachment, some algebraic simplification can be done on the mode shapes by defining two coordinate systems for two sections of the beam as shown in
Figure 3. The reference of the second coordinate system has been placed at the tip of the beam and the points in the second coordinate system are shown by “
”.
The following equation is true for the relation between the points in the first and the points in the second coordinate:
By applying the clamped end boundary conditions mentioned in (
8) to
Section 1 of the beam, the following result related to the mode shape constant of the first section is obtained:
Now, by considering the second coordinate system for the second section of the beam and considering no tip mass for the beam, the free boundary condition can be written for the second section of the beam in the following form:
By applying (
38) to the mode shape of the second section of the beam, (
39) is obtained:
Using (
37) and (
39), mode shapes for Segment 1 and 2 can be written as
By defining two coordinate systems, there are 4 unknown constants instead of 8 unknown constant. These 4 unknown constants can be found by rewriting (
9) for the new coordinate system,
Now, to find each constant, first
is considered to be 1. Then, the first three conditions of (
41) are solved analytically with the help of MAPLE software to find the remaining three constants as functions of the natural frequencies and attachment parameters. The code which is written in MAPLE software is mentioned in the
Appendix A. On the other hand, in this case there is no normalization in the mode shapes and the mass matrix in (
17) is not an identity matrix while it is still diagonal. Therefore, (
29) without normalization will be in this form:
By considering (
42) instead of (
29), the mass matrix
enters the piezoelectric voltage amplitude (
33) and this latter is rewritten in the following form:
The value of
is found analytically as function of the mode shape constants and attachment specifications by Maple software and it is reported in
Appendix A.
In the approach of the last two sections, natural frequencies and mode shapes have been found as functions of the attachment specifications.
3.3. Genetic Algorithm Optimization
Now, it is desired to find the optimal voltage amplitude from (
43) by finding the optimal position of the attachment, the attachment mass, mass moment of inertia, external force location, and piezoelectric patch location. As such, genetic algorithm is utilized in this paper, which has a great performance in dealing with multi variable optimization problems. Genetic algorithm is an optimization method that works based on the evolution theory and it is completely a simulation of real life in nature. By choosing the voltage amplitude (
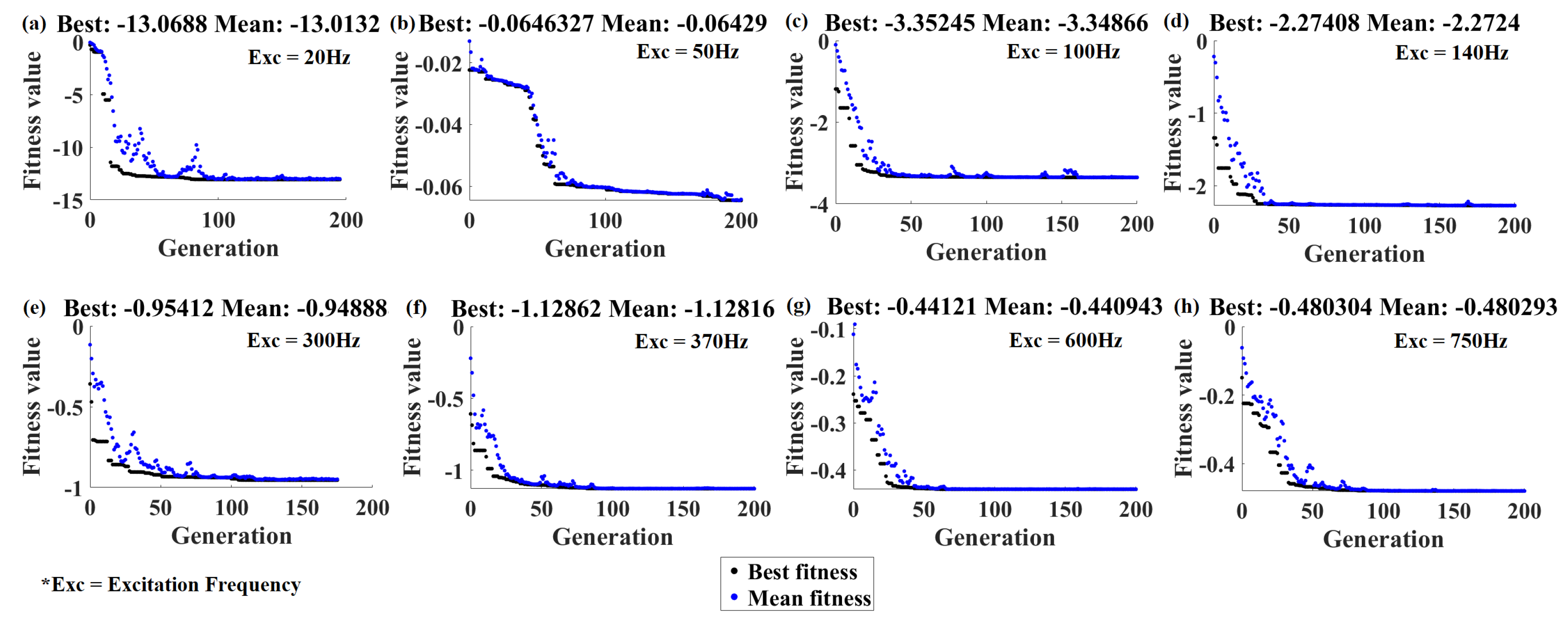
43) as fitness function to be optimized, the mathematical framework of GA optimization method works in the following steps:
A number of individuals is chosen which forms the first generation of the population. Each individual is a possible solution for the optimization of the fitness function. Higher number of individuals decreases the possibility of being trapped in the local optimums. here, 200 individuals are considered in the population.
Pairs of individuals are selected as parents with Roulette wheel method. The ratio of individuals selected as parents to the overall individuals is 0.8.
Two selected parents give birth to two offspring (two new possible solution) in the crossover procedure.
Then chromosomes of some offspring will be changed in mutation procedures. The chromosomes for the optimization problem are the optimization variables. The percentage of offspring who experienced the mutation to the whole population is called mutation percentage which is considered here to be 10 percent.
The last step is the evaluation procedure in which individuals with lowest fitness value will be replaced by offspring. These newly born offspring with remaining individuals form the next generation. To calculate the fitness value of each individual, MLP network and analytical expression for the mode shape constants should be used which will be explained in the next section.
Newly formed generation will undergo the same procedure of the previous generation.
MATLAB GA toolbox performs the aforementioned steps and stops after a restricted number of times.
3.4. Neural Network Based Genetic Algorithm (NN-GA)
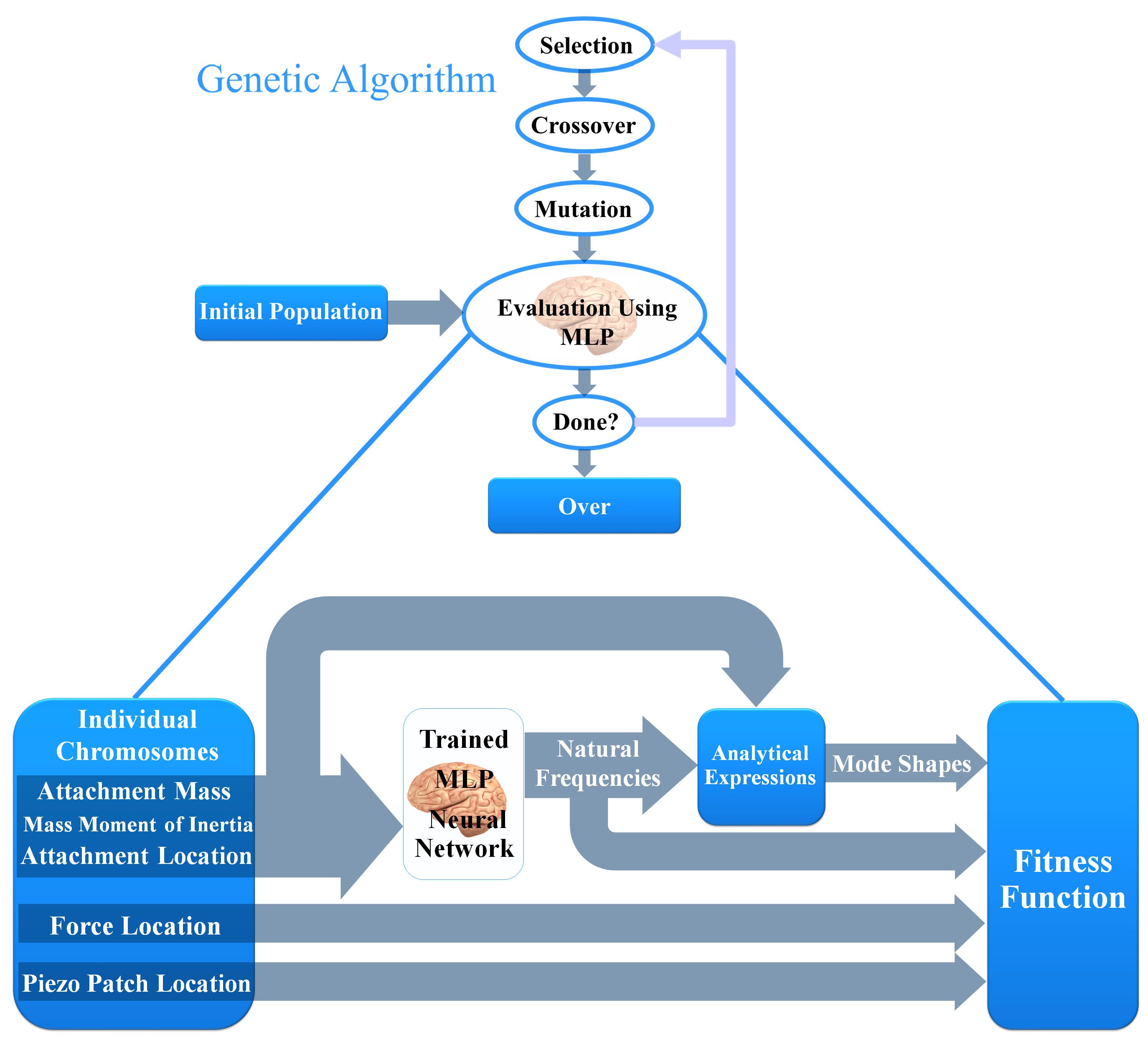
In the evaluation step of genetic algorithm, the fitness value of each individual should be determined. As has been shown in
Figure 4, each individual has 5 chromosomes in which 3 of them are related to the attachment. MLP neural network calculates the natural frequencies of the system based on the attachment parameters. Then, mode shapes are calculated by the analytical expressions for the mode shape constants. Finally, with the help of mode shapes, natural frequencies, force location and piezoelectric patch location, the fitness value of each individual are calculated by using the voltage amplitude (
43).
Using MLP neural network in the evaluation process of GA will increase optimization speed significantly by eliminating the cumbersome numerical procedures to find the natural frequencies related to each individual. Therefore, it is possible to choose the GA parameters (population number, mutation percentage, ...) different to those mentioned above to compare the results and to avoid trapping in the local optimums.
5. Discussion
By using the evolutionary optimization algorithms like GA, it is always possible to be in the local optimums. To reduce the possibility of local optimums, GA can be applied several times with different parameters (population of individuals, mutation rate, etc.). In general, this procedure is very time consuming. However, by introducing the MPL in the core of evaluation process, the GA is performing fast enough to be applied several times with different parameters. On the other hand, even without applying the GA for several times, still the improvement of obtained results in comparison to the classical approach of tip attached cantilever beam is significant.
The optimization methodology is applied on a particular case of a beam with one in-span attachment. However, with the proposed analytical approach for the calculation of the piezoelectric voltage, the optimization methodology can be applied on a beam with several in-span attachment as well. On the other hand in this case more training data will be required for the MLP neural network.
Finally, while the optimization methodology proposed in this paper is for piezoelectric energy harvesting scope, it could be worth to explore its application to piezoelectric sensing scope. Most of the existing miniaturized piezoelectric sensors studies are focused on on fabrication technology and on their integration, but also on their combination with piezoelectric actuation in order to form one single and same structure for both actuation-sensing (named as self-sensing) [
39,
40,
41]. Perspective works could therefore explore the use of optimization methodologies, among which the one in this paper, to design sensing or self-sensing structures with piezoelectric elements.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}