1. Introduction
Object curvature is important information that human hands need to acquire when they are engaged in tactile perception [
1] and also plays an important role on the contact state [
2]. Likewise, it provides reference information for an intelligent hand to adjust its grasping strategy during manipulation. Generally, it is not necessary to know the exact contour of an object going to be manipulated, so local curvature is more useful information for grasping. Currently, vision and touch are the two main ways to deal with the extraction of object surface curvature. In many scenarios, object curvature information can be directly obtained through visual perception [
3,
4,
5]. However, in the case of poor light or during grasping, the contact area between the finger and the object is partly or completely invisible to the vision system. In this case, the local curvature in the contact area can only be acquired through tactile perception. Furthermore, it is noteworthy that the curvature is changeable during grasping when the contact area is non-rigid. Therefore, the discrimination of object curvature must be practically involved along with tactile perception.
Existing research using only tactile technology to estimate object curvature is limited. In 2011, N. Wettels et al. [
6] classified four objects with different curvatures (plane, radius of curvature 10 mm, 3.6 mm, and 1 mm). S. Salehi et al. [
7] classified the curvature of three objects (plane, blade, and radius of curvature 2.5 mm). However, the above studies on object curvature discrimination were mainly to classify a limited number of objects with known curvature, and could not provide the specific value of the curvature. In 1991, R. S. Fearing et al. [
8,
9] tried to use a stress/strain distribution model of a flexible skin layer in the contact state to inversely solve the surface curvature based on Hertz contact theory. In 2017, Y. Kim et al. [
10] used the flexible surface of the sensor to fit the object, and used the Light Emitting Diode (LED) and Complementary Metal Oxide Semiconductor (CMOS) image sensor to reconstruct the surface contour of the sensor to measure the curvature. There are some based on other methods such as the 2016 Ran Xu et al. [
11] study using fiber Bragg grating (FBG) sensors to measure the curvature, but was only limited to complete tubular and cylindrical objects.
A more common method of curvature discrimination research is that the manipulator moves along the contour of the object, and the surface curvature is solved by the spatial trajectory information of the movement [
12,
13,
14,
15,
16,
17,
18]. Back in 1996, M. Charlebois et al. [
12,
13] planned the exploratory movement of a mechanical tentacle on the surface through contact perception. H. Zhang et al. [
14] estimated the surface curvature based on the least square estimation (LSQ) method through rolling contact between the tactile sensor and objects. In 2007, J. Tian et al. [
16] rebuilt the surface by tracking along three concurrent curves on the surface to obtain curvature information. In 2017, Ian Abraham et al. [
18] used a low-resolution binary contact sensor for ergodic exploration and successfully obtained curvature information.
To sum up, research on tactile curvature discrimination has not been systematically and extensively investigated. The contour tracking method can detect both convex and concave surfaces, but it has a trivial effect for relatively small objects. Moreover, it takes a lot of time to track the surface contour, so the curvature information cannot be obtained in real time. Therefore, a universal and real-time curvature estimation method using only tactile information is indeed necessary.
Discrimination ability with high spatial resolution like human hands is what people have always desired. For the human hand, there is a mechanoreceptor density for tactile perception of up to 17,000 units in a hand, and the spatial resolution is up to 1.6 mm [
19]. Reducing the size of the sensor and increasing the density of sensor units are the most traditional methods [
20,
21], but is still far from reaching the level of the sensor density of human hands. Moreover, the high-density sensor array is difficult to integrate, the circuit is tedious, and the signal processing is complicated. Therefore, how to use a sparse sensor array to realize high spatial resolution detection is particularly important [
22]. Utilizing the compliant layer to couple the contact information, it is possible to discriminate the curvature by means of the tactile sensor array alone [
23]. However, the contact process between the object surface and the compliant layer is non-linear. To this end, we used an artificial neural network (ANN) mapping algorithm. It is suitable for solving complicated nonlinear problems with large samples, which has already been widely used in speech recognition, image recognition, and other fields [
24].
In this paper, the authors used a sparse tactile sensor array covered with a continuous compliant human-like skin layer [
25] to acquire haptical information. An ANN-based curvature discrimination method is put forward. Through the supervised learning of the experimental sample data, a curvature value estimation model was established to extract the object curvature information by tactile perception. It is more meaningful to use a sparse tactile sensor array instead of a high-density sensor array, demonstrating the potential capability of prosthetic applications. Most of the existing tactile curvature discrimination methods are non-real-time or can only classify a limited number of objects, whereas the proposed method here was used to estimate the specific curvature value of the grasped object. Furthermore, the authors extended the discrimination object from a simple spherical object to a cylindrical object. As the relevant research is relatively rare, the authors evaluated the results with the curvature discrimination ability of the human body both in recognizable range and discrimination accuracy.
The rest of this paper is organized as follows. The tactile sensor device is presented in
Section 2, followed by the introduction of the object curvature discrimination methodology based on ANN in
Section 3. The detailed experiment and experimental results are presented in
Section 4. Subsequently, the results are commented in
Section 5. Finally, the conclusion and prospect are discussed in
Section 6.
2. Tactile Sensor Device
In many studies, the tactile sensor was intentionally added with a compliant layer similar to the skin. Youngwoo Kim et al. designed a fluid-type tactile sensor able to measure the size and depth of heterogeneous substances in elastic bodies that consisted of an image sensor, LED lights, and a touch pad filled with translucent water [
10]. The University of Genoa in Italy developed a tactile sensor using piezoelectric conductive rubber as a sensitive material, which consists of 8 × 8 arrays of 64 tactile units. In this research, a thin elastic film was used to cover the sensor as a protective layer [
26]. Regarding the flexible tactile sensor, there is a contradiction between the necessity of compliant skin layers and their negative effect on the precise detection of contact pressure [
27]. On one hand, the compliant skin layer is indispensable for tactile sensors, which ensures smooth and stable contact with objects and protects the sensitive element from the direct impact of the touched object. Unfortunately, on the other hand, the compliant skin layer brings forward an obvious attenuation effect on the contact pressure signal, deteriorating the effectiveness of contact pressure detection. Furthermore, even if a rigid sensor array is covered by a compliant protective layer, the fragile sensitive element (silicon-based sensing element especially) still cannot be fully protected because it is still in contact with the solid medium, which risks breaking the embedded sensitive silicon diaphragm and weak connecting wires.
In this paper, a lab-developed solid–liquid hybrid sparse tactile sensor array was used [
25,
28]. The structure of the sensor we used was a compliant layer encapsulating the fluid and the silicon sensing element inside. The authors used fluid to replace some parts of the traditional single soft layer. Unlike traditional hydraulic devices, the fluid chamber of this sensor cell contains the soft part, which also deforms under the fluid pressure. While the compliant layer deforms under external contact to compress the fluid inside, the induced fluid pressure is also reversely loaded onto the compliant layer and makes it deform. Thus, there is a coupling effect between the compliant layer deformation and the encapsulated fluid compression. Therefore, fluid compression can map the deformation state of the compliant layer and directly correspond to the output of the sensing element. The encapsulated sensor cell has good sensing performances with sensitivity of 19.9 mV/N, linearity of 0.998, repeatability error of 3.41%, and hysteresis error of 3.34%. The force sensing range is from 5 mN to 1.6 N.
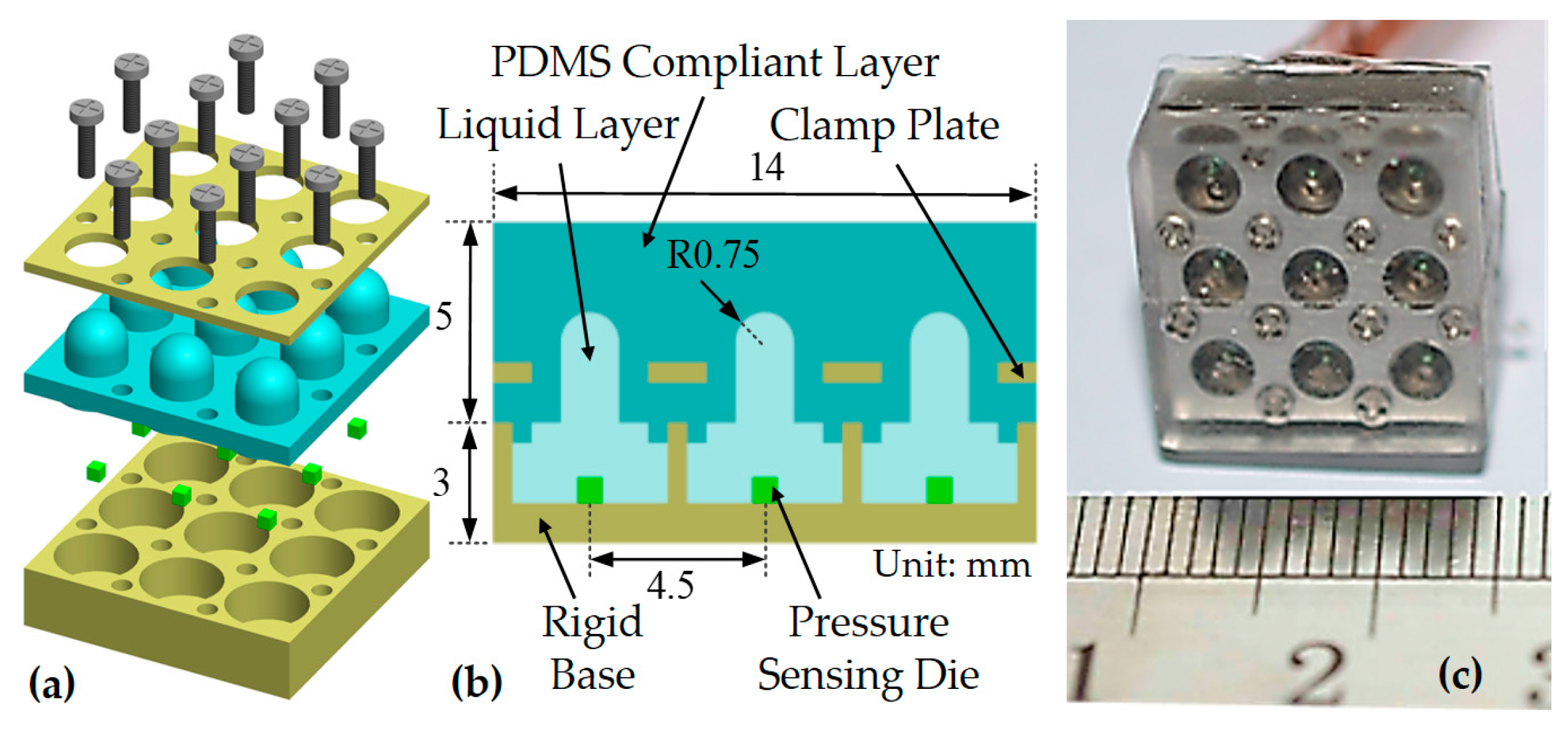
The mechanical structure explosion diagram is shown in
Figure 1a. Some modifications have been made on the part of the flexible layer. The flexible layer changes to a continuous planar compliant layer, as shown in
Figure 1b. The sensor array mainly consisted of five parts: rigid base, silicon pressure sensing die, silicone oil liquid layer, polydimethylsiloxane (PDMS) compliant layer, and stainless steel clamping plate. The overall size was 14 mm × 14 mm × 8 mm including nine sensor units in a 3 × 3 layout, with the spacing of sensor units of 4.5 mm. The thickness of the PDMS compliant layer was 5 mm. The selected silicon pressure sensing element was a cubic silicon pressure sensing die (Silicon Microstructures, Inc., SM5108C-060, Milpitas, CA, USA). The silicone oil liquid layer was filled with 50 cSt silicone oil (Dow Corning Inc. pmx-200, Midland, MI, USA). The silicone oil not only acts as a transferring medium of pressure conduction, it can also effectively protect the silicon-based sensor unit. The practical diagram of the sensor array is shown in
Figure 1c.
3. Methodology
3.1. Curvature
As shown in
Figure 2, for a point on a differentiable surface in three-dimensional Euclidean space, there exists a unique unit normal vector. Innumerable planes containing the unit normal vector can be made, and these planes are called normal planes. The intersection of any normal plane and surface will form a curve passing through the point, and the curve will have a curvature at the point. The two curvatures obtained from any two normal planes perpendicular to each other are called orthogonal curvatures. When a set of orthogonal curvatures are the maximum and minimum values of such kind of curvatures, respectively, the set of orthogonal curvatures is called the principal curvature, represented by
k1 and
k2. The principal curvature is unique for any point on the surface. Differentiable surfaces can be divided into six different types, according to the positive and negative relationship of principal curvature, as shown in
Table 1. The surface of objects often has a variety of surface types, and local small areas can be approximately considered as a single type.
This paper focused on the local curvature at the point of contact between the object and the finger. Considering the compliant tactile sensor used in this paper with a flat surface skin layer, it could not effectively reach unseparated contact with concave ellipsoid, concave cylinder, and hyperboloid. Thus, this paper did not involve the contact of these three types of objects; only plane, convex ellipsoid, and convex cylinder were chosen for validation of the proposed method. Due to the complexity of the unequal principal curvature combination for convex ellipsoid contour perception, even humans can acquire only a simple impression of bending degree from the hand perception instead of having information from whole different direction curvatures. Therefore, this paper focused on a simplified situation where the principal curvature was equal, the so called convex sphere, which can be identified by a unique curvature value.
3.2. Basic Theory
The intuitive reason why the tactile sensor array can recognize the curvature of the object surface is that the compliant skin layer above the tactile sensor array can be deformed along with the object shape during contact pressure evolution. Additionally, the deformation will bring the stress change inside the compliant layer, which affects the signal outputs of the underlying tactile sensor array. The surface of the object with different curvature will produce different deformation to the coverage layer, resulting in different signal outputs of the tactile sensor array. There exists an intrinsic mapping relationship between curvature and signal outputs. Based on the theory of Hertz contact (no adhesive contact), this subsection utilizes the contact model between rigid sphere and elastic semi-space to analyze the relationship between the stress distribution in elastic semi-space and the curvature radius of the sphere.
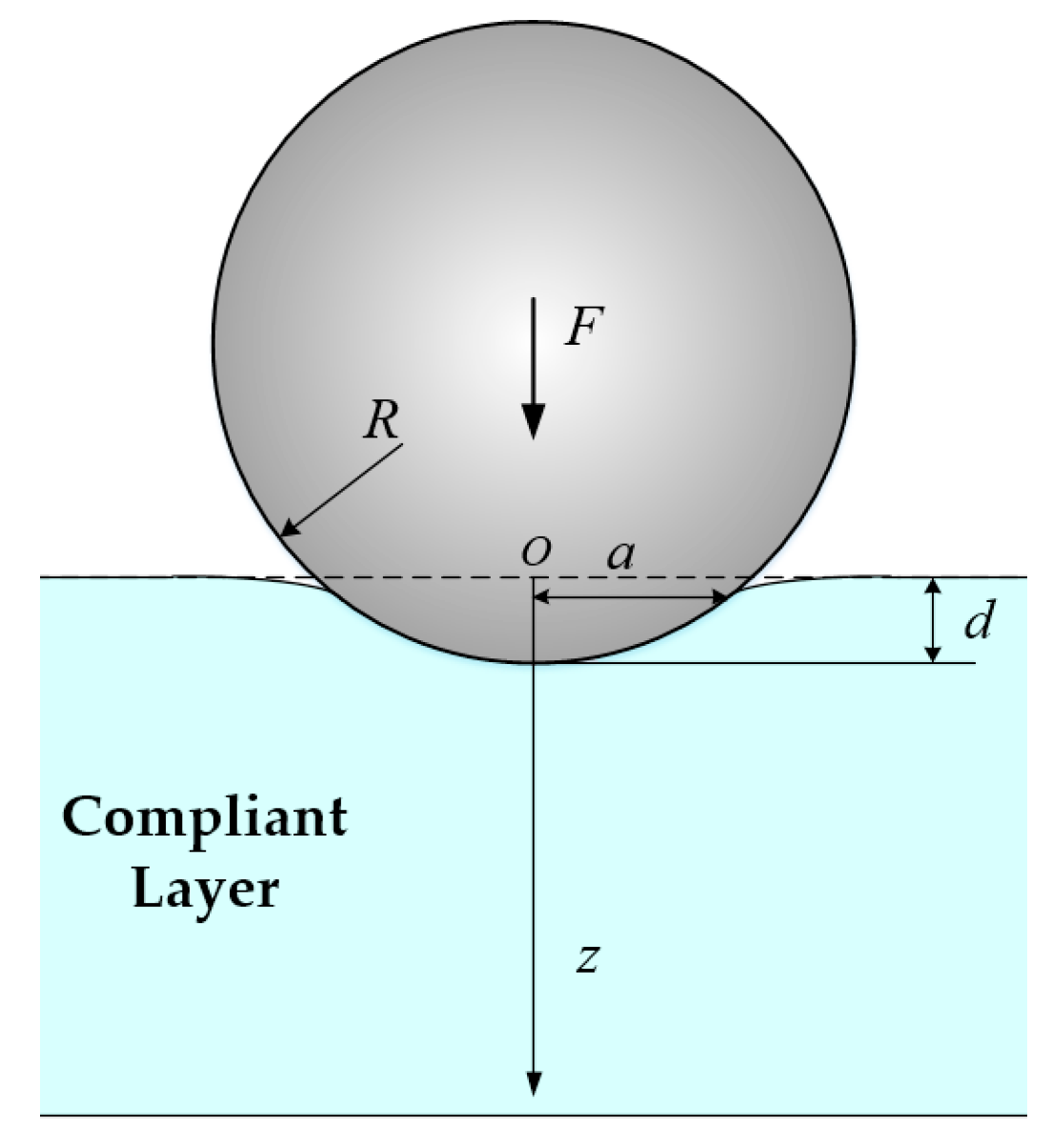
As shown in
Figure 3, a rigid sphere with radius
R comes into Hertz contact with the elastic semi-space surface. The force applied on the hemisphere is
F, the maximum depth of pressing into the elastic semi-space surface is
d, and the radius of the contact area is
a.
The cylindrical coordinate system is established with the initial contact point position as the origin point
O. The relationship between stress, radius of curvature, and depth of pressing is shown in Equation (1).
where
;
E is Young’s modulus of the elastic semi-space material;
is the Poisson’s ratio of the elastic semi-space material; and
z represents the depth in the z direction. According to Equation (1), as
z2/
d is generally much larger than
d, when the depth of pressing and the depth of the sensor array are determined, there is a non-linear mapping relationship between
z normal stress and the curvature radius
R of the object. In
Figure 4, the relationship curve between
z normal stress and curvature radius at the point where the depth is
z = 5d is shown.
3.3. Artificial Neural Network Method
In this paper, a BP (back propagation) neural network was chosen to investigate the curvature discrimination of objects. When the compliant skin layer of the tactile sensor array is in contact with the object, it can fuse the surface topography information of the object and transmit signals in a timely manner through a limited number of tactile sensor arrays. Such information processing is often non-linear. The BP neural network can effectively analyze the non-linear information and is suitable for the investigation of object curvature discrimination.
As mentioned in
Section 3.1, the curvature discrimination of contact objects in this paper only considered a plane, convex cylinder, and convex sphere, which also have a significant difference in contact state characteristics. As shown in
Figure 5, the contact surface between the convex cylinder and the compliant skin layer was axisymmetric, while the contact surface between the plane and the convex sphere and the compliant skin layer was centrally symmetric. However, the contact surface of the convex sphere will increase with the increase in the depth of pressing, while the contact surface of the plane will not change. Therefore, the BP neural network classification model needs to be established first to classify the surface shape features of unknown objects and determine which surface type it belongs to. Then, corresponding BP neural network curvature radius prediction models should be built for the convex cylinder and convex sphere, respectively, to estimate the specific curvature radius of the contact surface.
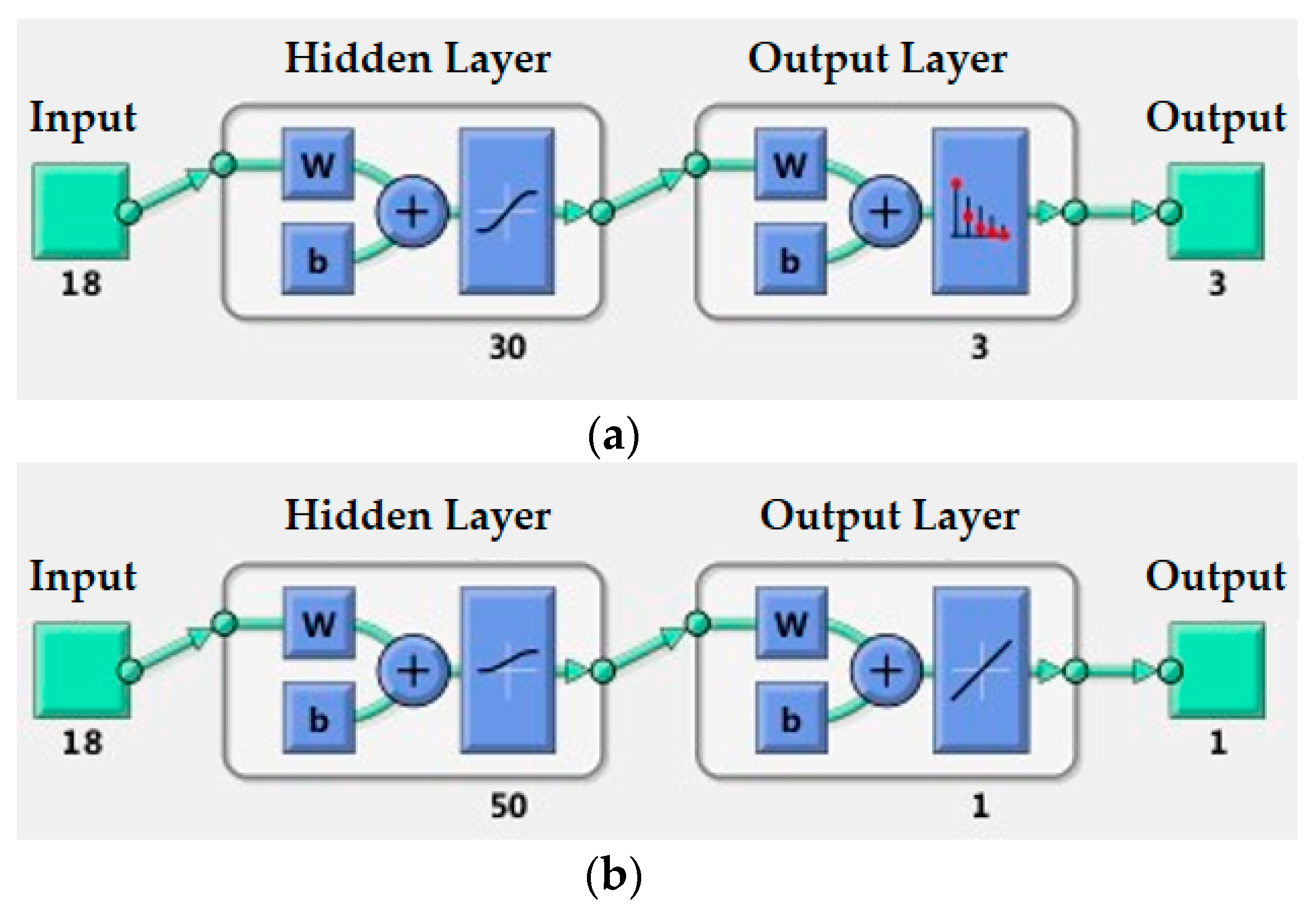
As shown in
Figure 6, the surface type classification neural network structure and curvature radius estimation neural network structure were established, both of which are BP neural networks with a single hidden layer. The input signal comes from the nine sensing units of the tactile sensor array, each of which contains two types of signal information: time-domain signal information (sensitivity variation) and frequency-domain signal information (principal frequency component), so there are 18 input signal information in total. Considering that curvature value estimation is more complex than classification, the number of units in the hidden layer was set as 30 for surface type classification and 50 for curvature estimation. The output is the code of the three types of surface and a single value of curvature radius, respectively.
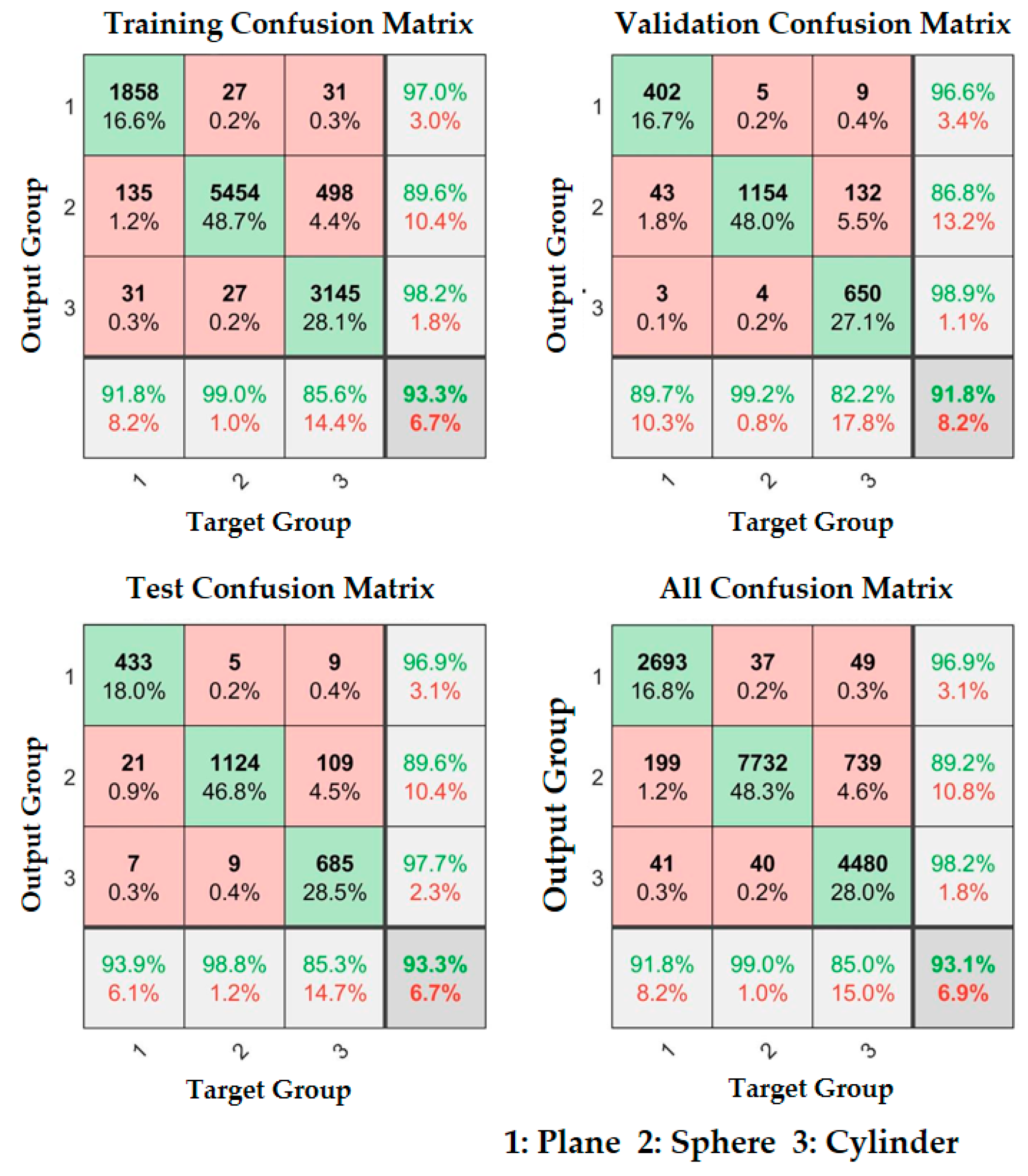
After the establishment of the neural network topology structure, the above two neural networks were trained according to the experimental sample data. The samples were randomly divided into 70%, 15%, and 15% for neural network training, verification, and testing, respectively. The validity of the established neural network is analyzed in next section, according to the test results.
5. Discussion
In this section, we evaluate the performance of the curvature discrimination algorithm based on the sparse sensor array, and compare the results with existing research and the curvature discrimination ability of human fingers. First, the authors discussed the curvature type classification performance of the algorithm. In the existing research on classification of curvature type using tactile technology, N. Wettels et al. [
6] classified four samples with an accuracy of 94.7% and S. Salehi et al. [
7] classified three samples with an accuracy of 97.5%. In this paper, the authors tested three types of samples and each type included 30 different radius samples (except for the plane). This is equivalent to classifying 61 different samples into three types with an accuracy of 93.1%. Under a more systematic experiment, the accuracy remained at the same level, showing the good performance of the sensor we designed as well as the algorithm.
More strikingly, the authors estimated the curvature value of the sample. As the relevant research is relatively superficial, we evaluated the results with the curvature discrimination ability of the human body. In 1991, A.W. Goodwin et al. [
29] pointed out that fingers can distinguish the difference in curvature between 6.95 mm and 6.33 mm, and the difference was 3.48 mm and 3.13 mm, respectively. About 10% of the curvature difference could be discriminated. A few months later, another experiment [
30] showed that when the contact area was constant, a human finger could identify a 13% difference in curvature at 3.50 mm and 18% difference in curvature at 6.49 mm. In 2014, Gregory J. Gerling et al. [
31] came to a conclusion similar to Goodwin’s through modeling and simulation. It is worth noting that the aforementioned human finger’s discrimination of curvature does not identify the specific value of curvature, but only determines whether the two curvatures of the given samples are identical. There is still a gap between this and judging the curvature value directly. Our curvature discrimination results showed that when the radius of curvature was bigger than 5 mm, the average relative error was less than 20%. When the radius of the curvature increased, the average relative error decreased. When the radius of curvature was small, the error was indeed large, and the error increased sharply when the radius of curvature was 1 mm. The discrimination effect needs to be improved when the radius of curvature is small, and it may work to improve the discrimination accuracy through separate modeling training.
In more detail, the density of the sensing elements can be evaluated with human hand mechanoreceptor density. There are four types of functional classes of tactile afferents [
32]: slowly adapting type I (SAIs); slowly adapting type II (SAIIs); fast-adapting type I (FAIs); and fast-adapting type II (FAIIs). The response of SAIs increased from the curvature radius of 1.92 mm to the plane; the response of SAIIs increased when the curvature radius from 5.81 mm to 12.4 mm, but did not change significantly in other ranges. The other two types (FAIs and FAIIs) had no obvious response to curvature. SAI was mainly distributed at the fingertips, with a density of 70/cm
2. SAII, on the other hand, was more evenly distributed in the palm, with a density of about 20/cm
2 [
33]. In 2011, Isabelle I. et al. indicated through a validated computational model [
34] that a population must have at least 20 sensors/cm
2 to maintain response resolution in daily living [
35], which is close to the density of SAII receptors. As a comparison, the sensor array density we used in this paper was less than 9/cm
2, which is smaller than the density of human SAII receptors. The discrimination result was close to that of the SAII receptors, and the sensing range was slightly larger than that of the SAII receptors. Although the discrimination effect was slightly weaker than the performance of the finger tips, it is similar to the discrimination performance of other parts of the human hand, which has a very promising application prospect.
6. Conclusions and Outlook
In this paper, a previously published sparse tactile sensor array from our laboratory was used to systematically investigate the performance of tactile sensors in curvature response through an artificial neural network including classification and estimation of the curvature value. Abundant, plentiful samples were used in our experiment including plane, spheres, and cylinders and the curvature radius ranged from 1 mm (pen tip, electrical wire) to 30 mm (apple, door handle, water bottle), covering most everyday items and guiding practical applications. The results showed that the classification performance of curvature type by this method was effective, and the classification accuracy reached 93.1%. Regarding the estimation of the curvature radius value, the results showed that the relative error was less than 20% when the radius of curvature was larger than 5 mm. We consider this to be an acceptable result when compared with a human finger experiment, which shows that the lab-developed sensor has very promising application prospects.
In future works, the following aspects can be improved and expanded based on the work of this paper: explore the method of non-convex object surface curvature discrimination, consider the actual contact situation after integrating the sensor array into an artificial hand, and extend the object curvature discrimination method to an arbitrary contact state.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}