Experimental Research on PVDF Sensing Surface Characteristic Curve Applied to Topography Perception


Abstract
:1. Introduction
2. The Principle of Three-Dimensional Topography Characteristic Curve Sensing Based on PVDF Array
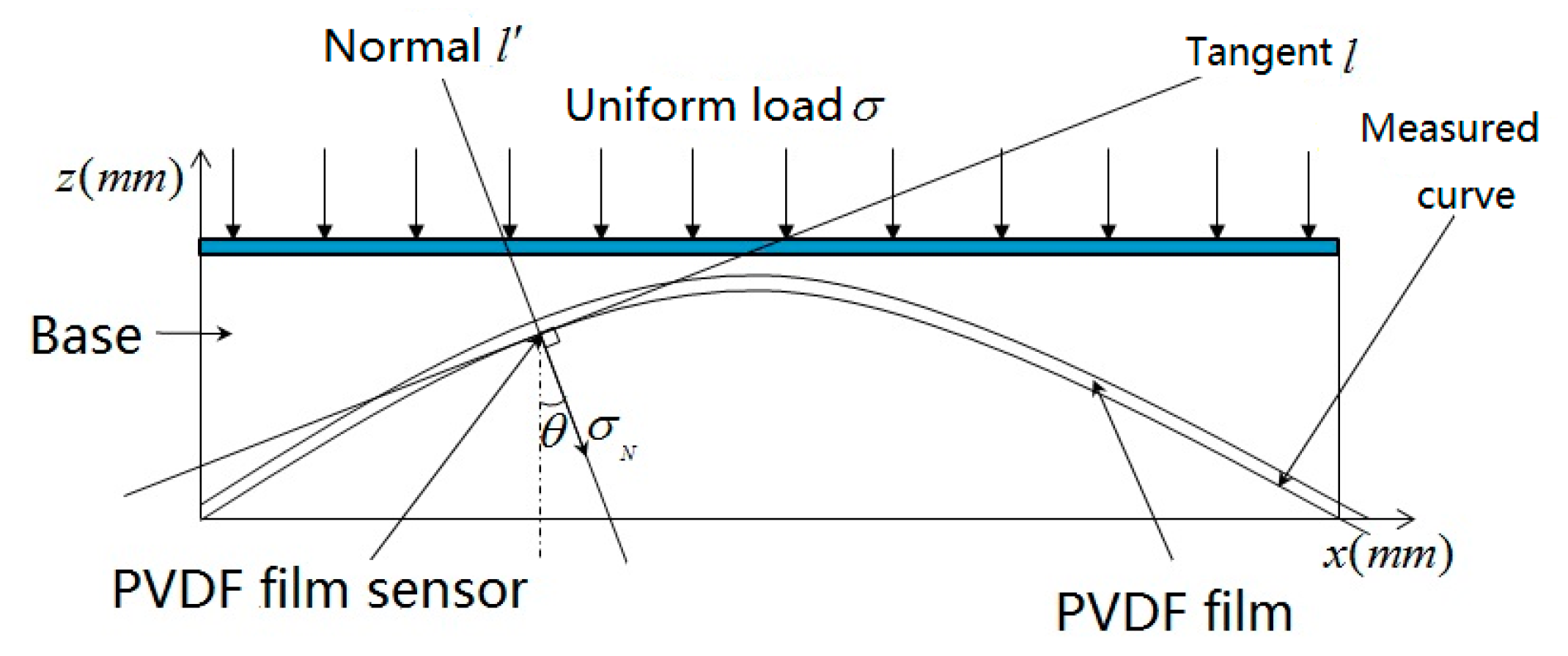
2.1. PVDF Piezoelectric Film Topography Sensing Mechanism
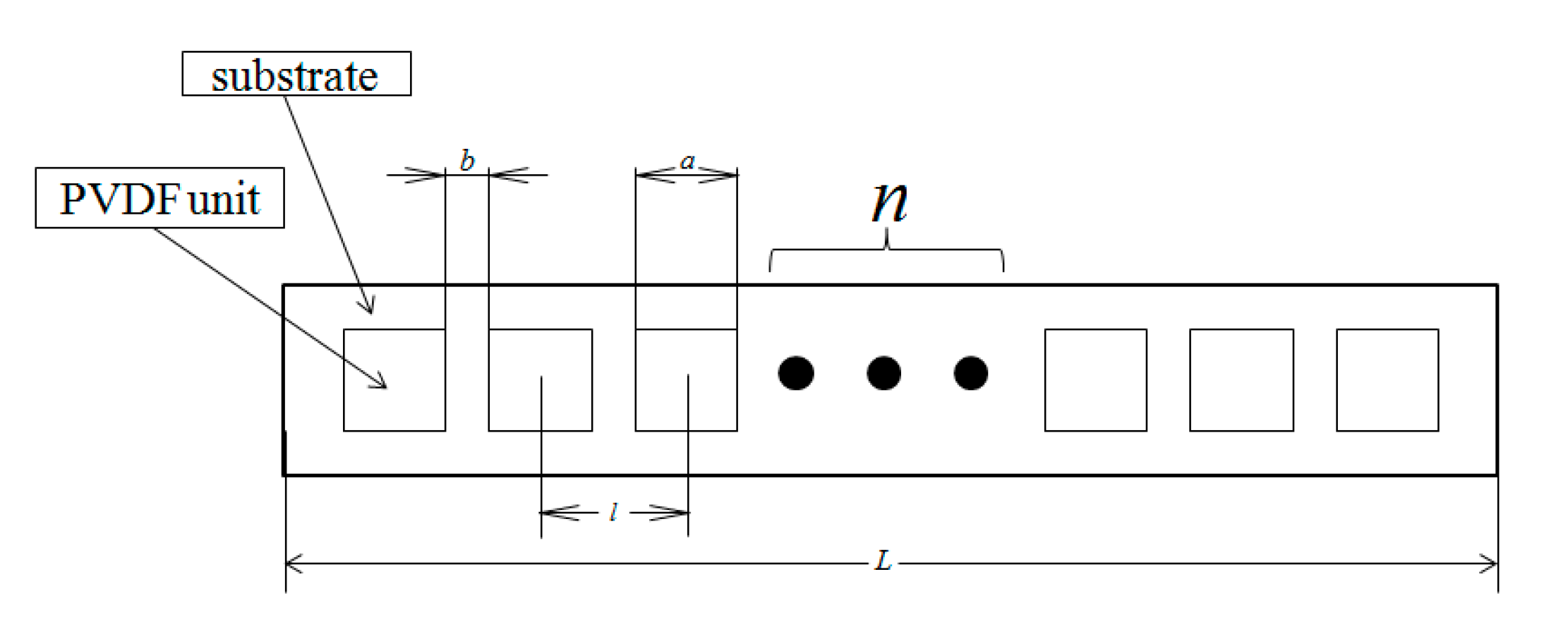
2.2. Analysis of Three-Dimensional Shape Sensing Model Based on PVDF Piezoelectric Film
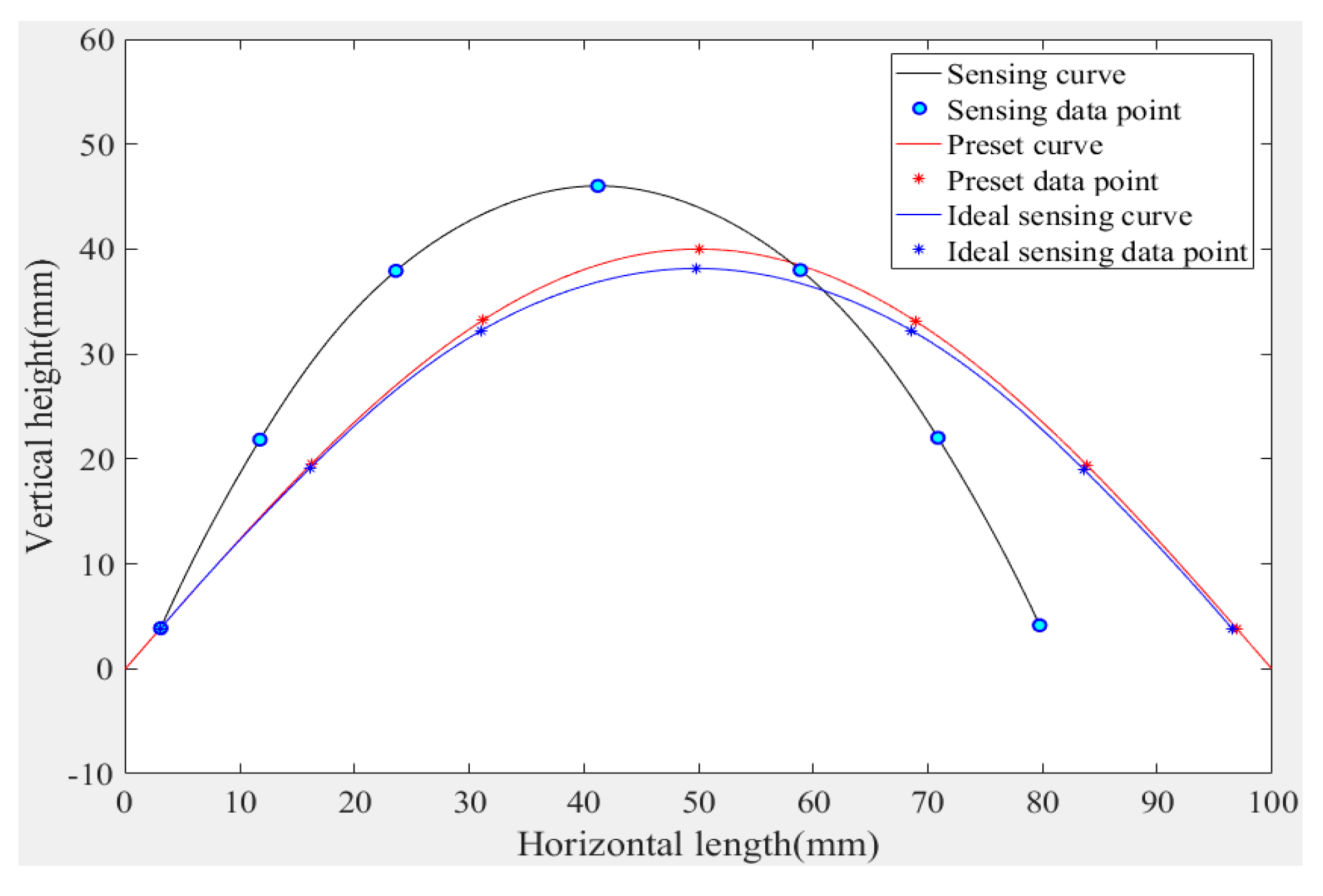
3. Experimental Research on Sensing of Three-Dimensional Topography Characteristic Curve Based on PVDF
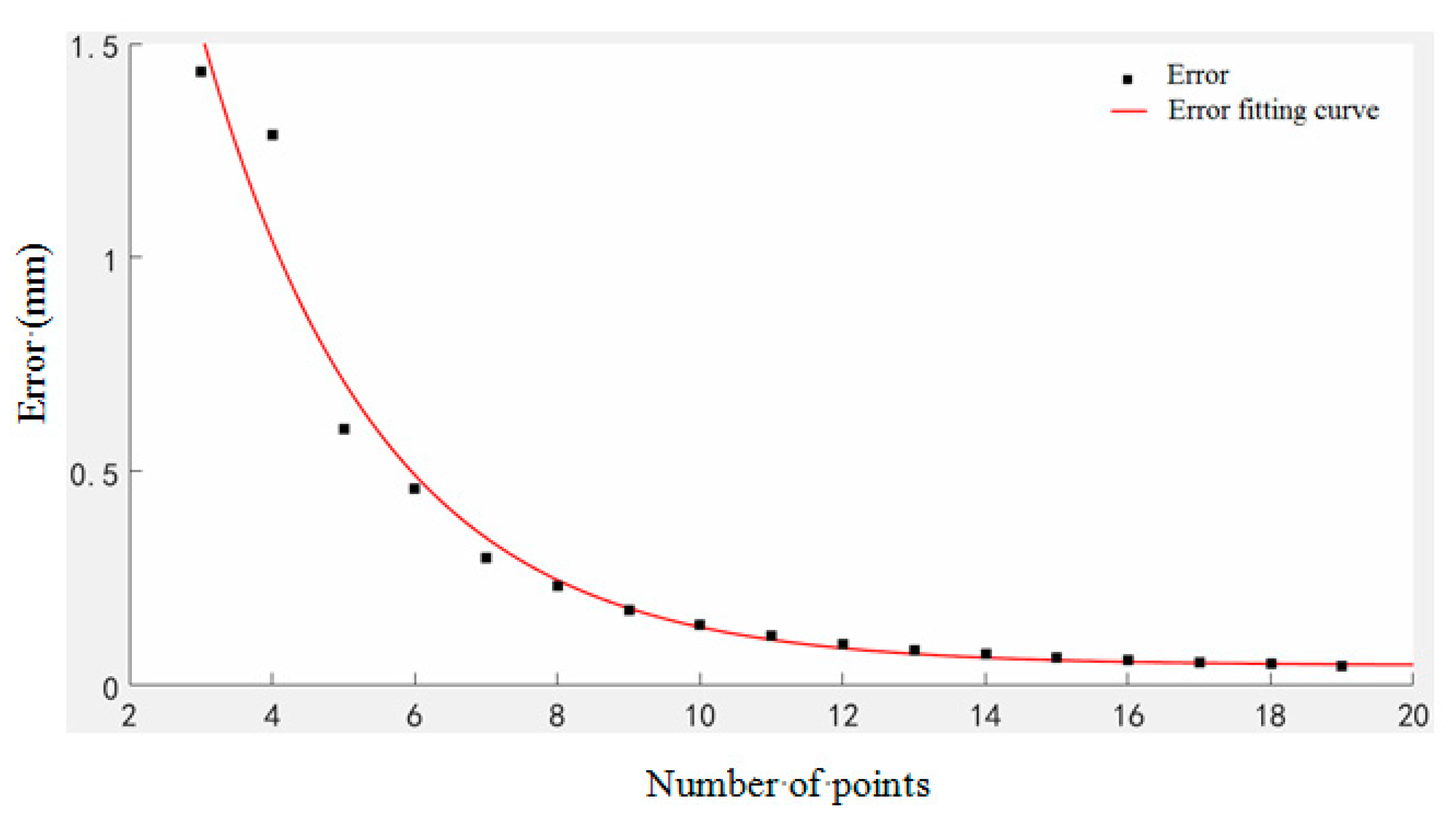
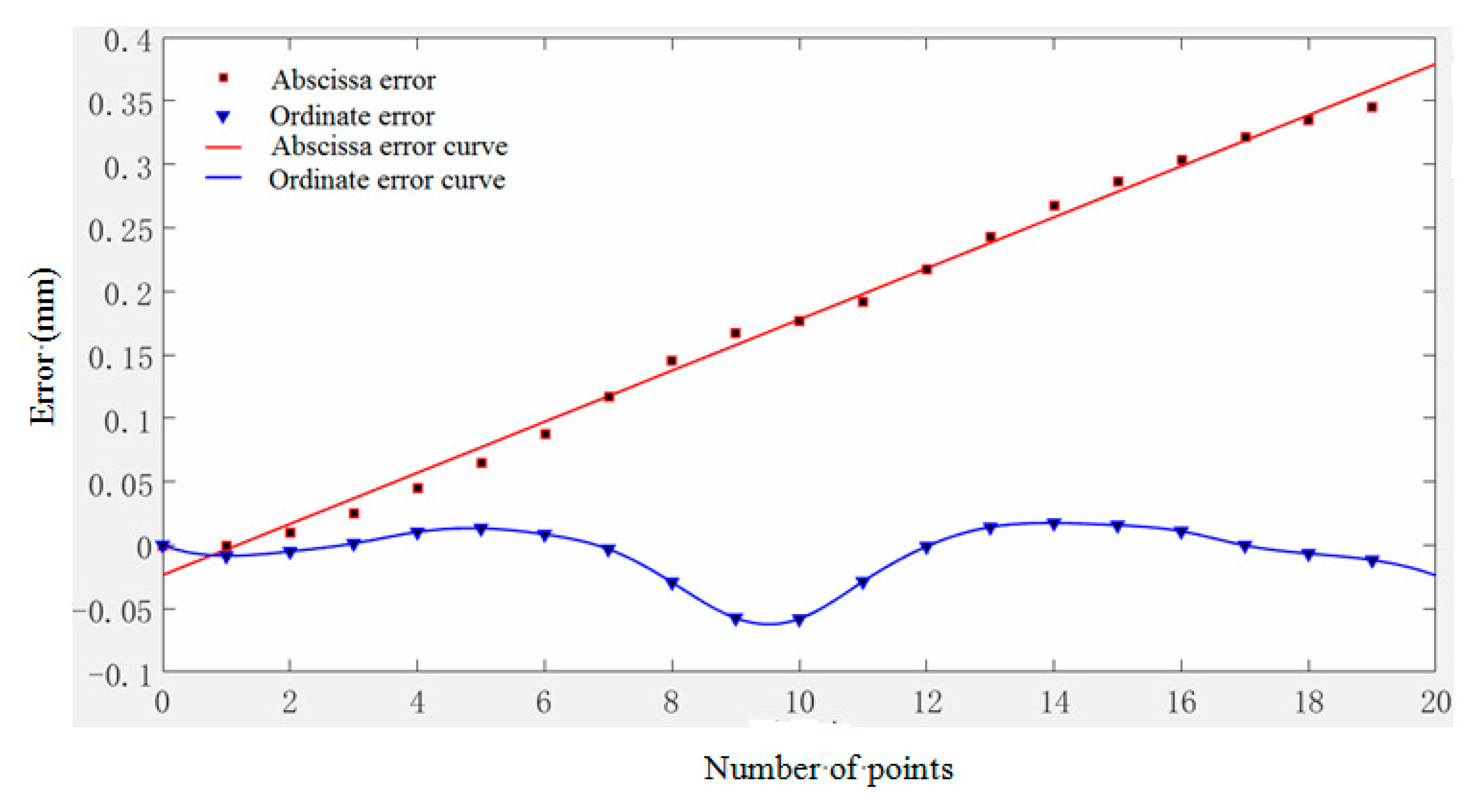
4. Error Analysis of Shape Sensing Experiment Using PVDF Array
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xiang, Z.; Shuang-yun, S.; Zhi-jun, S. A detection method based on line-structured light sensor for geometrical morphology of track slab. Chin. Opt. 2018, 11, 841–850. [Google Scholar] [CrossRef]
- Guo, H.; Ju, F.; Cao, Y.; Qi, F.; Bai, D.; Wang, Y.; Chen, B. Continuum robot shape estimation using permanent magnets and magnetic sensors. Sens. Actuators A 2019, 285, 519–530. [Google Scholar] [CrossRef]
- He, Y.; Dong, M.; Sun, G.; Meng, F.; Song, Y.; Zhu, L. Shape monitoring of morphing wing using micro optical sensors with different embedded depth. Opt. Fiber Technol. 2019, 48, 179–185. [Google Scholar] [CrossRef]
- Guo-hui, W.; Er-xing, W.; Li-ping, W. A near infrared system of three dimensional facial shape recovery based on PSFS. Video Eng. 2018, 42, 36–41. [Google Scholar]
- Zan-zan, Z.; Hui, W.; Qiong, W. Three dimensional shape reconstruction based on digital holography of stereo matching technology. Chin. J. Lasers 2014, 11, 51–60. [Google Scholar]
- Dao-ming, Q.; Guang-kai, S.; Hong, L.; Xiao-ping, L.; Lian-qing, Z. Optical fiber sensing and reconstruction method for morphing wing flexible skin shape. Chin. J. Sci. Instrum. 2018, 39, 147–154. [Google Scholar]
- Llin-yong, S.; Hai, X.; Jin-wu, Q. Shape reconstruction and visualization of intelligent endoscope. Chin. J. Sci. Instrum. 2014, 35, 2725–2730. [Google Scholar]
- Wang, Z.F.; Wang, J.; Sui, Q.M.; Li, S.C.; Jia, L. In-situ calibrated deformation reconstruction method for fiber Bragg grating embedded smart Geogrid. Sens. Actuators A 2016, 250, 145–158. [Google Scholar] [CrossRef]
- Chao, W. Three dimensional shapes detecting method of soft manipulator based on fiber Bragg grating sensor. Control. Instrum. Chem. Ind. 2015, 42, 1130–1133. [Google Scholar]
- Nakouti, I.; Korostynska, O.; Mason, A.; Al-Shamma’A, A.I. Detection of Pathogenic Bacteria in Aqueous Media: Assessing the Potential of Real-Time Electromagnetic Wave Sensing. Int. J. Smart Sens. Intell. Syst. 2020, 7, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Yi-ping, T.; Ting, W.; Gong-ping, Y.; Shao-hui, L.; Zhong-yuan, Y. Three dimensional omni-directional vision sensor for morphology defects detection in pipelines. Chin. J. Sci. Instrum. 2017, 38, 726–734. [Google Scholar]
- Hwang, C.; Song, W.; Song, G.; Wu, Y.; Lee, S.; Son, H.B.; Kim, J.; Liu, N.; Park, S.; Song, H.-K. A Three-Dimensional Nano-web Scaffold of Ferroelectric Beta-PVDF Fibers for Lithium Metal Plating and Stripping. ACS Appl. Mater. Interfaces 2020, 12, 29235–29241. [Google Scholar]
- Yi, X.; Chen, X.; Fan, H.; Shi, F.; Cheng, X.; Qian, J. Separation method of bending and torsion in shape sensing based on FBG sensors array. Opt. Express 2020, 28, 9367–9383. [Google Scholar] [CrossRef]
- Song, X.; Zhang, Y.; Liang, D. Dynamic input estimation and shape sensing for a nonlinear beam based on distributed fiber bragg grating sensor network. Optik 2018, 156, 896–905. [Google Scholar] [CrossRef]
- Zhuang, W.; Sun, G.; Li, H.; Lou, X.; Dong, M.; Zhu, L. FBG based shape sensing of a silicone octopus tentacle modelfor soft robotics. Optik 2018, 165, 7–15. [Google Scholar] [CrossRef]
- Li, Q.; Xing, J.; Shang, D.; Wang, Y. A Flow Velocity Measurement Method Based on a PVDF Piezoelectric Sensor. Sensor 2019, 19, 1657. [Google Scholar] [CrossRef] [Green Version]
- Shen, L.Y.; Chen, J.J.; Qian, J.W.; Zhang, Y.N. Real-time Detection of Curve Shape by Using Strain Gauges. Robot 2004, 26, 204–206. [Google Scholar]
- Koch, E.; Dietzel, A. Surface reconstruction by means of a flexible sensor array. Sens. Actuators A Phys. 2017, 267, 293–300. [Google Scholar] [CrossRef] [Green Version]
- Hai, X.; Ya’nan, Z.; Linyong, S. Research on curvature serialization in the curve reconstruction algorithm based on fiber Bragg grating. Chin. J. Sci. Instrum. 2016, 37, 993–999. [Google Scholar]
- Xudong, Z.; Qijie, Z. Arc contour detection method based on discrete curvature characteristics. J. ShangHai Univ. 2017, 23, 702–713. [Google Scholar]
- Yu, P.; Liu, W.; Gu, C.; Cheng, X.; Fu, X. Flexible Piezoelectric Tactile Sensor Array for Dynamic Three-Axis Force Measurement. Sensors 2016, 16, 819. [Google Scholar] [CrossRef] [Green Version]
- Pal, P.; Chaurasia, S.P.; Upadhyaya, S.; Kumar, R.; Sridhar, S. Development of hydrogen selective microporous PVDF membrane. Int. J. Hydrogen Energy 2020, 45, 16965–16975. [Google Scholar] [CrossRef]
- Baoxin, Q.; Qingzhao, K.; Hui, Q.; Patil, D.; Ing, L.; Mo, L.; Dong, L.; Gangbing, S. Study of Impact Damage in PVA-ECC Beam under Low-Velocity Impact Loading Using Piezoceramic Transducers and PVDF Thin-Film Transducers. Sensors 2018, 18, 1–17. [Google Scholar]
- Yang, L.; Qiuying, Z.; Kaineng, C.; Yizhou, M.; Yipeng, W.; Hongli, J.; Jinhao, Q. PVDF-Based Composition-Gradient Multilayered Nanocomposites for Flexible High-Performance Piezoelectric Nanogenerators. ACS Appl. Mater. Interfaces 2020, 12, 11045–11054. [Google Scholar] [CrossRef]
- Jiqing, C.; Jianping, J.; Changmin, C. Development of a PVDF Sensor Array for Measurement of the Dynamic Pressure Field of the Blade Tip in an Axial Flow Compressor. Sensor 2019, 19, 1404. [Google Scholar] [CrossRef] [Green Version]
- Youssef, A.; Matthews, D.; Guzzomi, A.; Jie, P. Contact Force Measurement in an Operational Thrust Bearing using PVDF Film at the Blade and Pad Passing Frequencies. Sensors 2018, 18, 3956. [Google Scholar] [CrossRef] [Green Version]
- Guofeng, D.; Zhao, L.; Gangbing, S. A PVDF-Based Sensor for Internal Stress Monitoring of a Concrete-Filled Steel Tubular (CFST) Column Subject to Impact Loads. Sensors 2018, 18, 1682. [Google Scholar] [CrossRef] [Green Version]
- Mohsin, T.; Moazzam, T.; Stephen, R.; Nigel, L.; Javaid, I. Bio-Inspired PVDF-Based, Mouse Whisker Mimicking, Tactile Sensor. Appl. Sci. 2016, 6, 297. [Google Scholar] [CrossRef] [Green Version]
- Luo, M.; Chong, Z.; Liu, D. Cutting Forces Measurement for Milling Process by Using Working Tables with Integrated PVDF Thin-Film Sensors. Sensors 2018, 18, 4031. [Google Scholar] [CrossRef] [Green Version]
- Yaohui, H.; Wuwei, K.; Yong, F.; Lingrui, X.; Longzhen, Q.; Tao, J. Piezoelectric Poly (vinylidene fluoride) (PVDF) Polymer-Based Sensor for Wrist Motion Signal Detection. Appl. Sci. 2018, 8, 836. [Google Scholar] [CrossRef] [Green Version]
- Shapiro, Y.; K´osa, G.; Wolf, A. Shape Tracking of Planar Hyper-Flexible Beams via Embedded PVDF Deflection Sensors. IEEE/ASME Trans. Mechatron. 2014, 19, 1260–1267. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
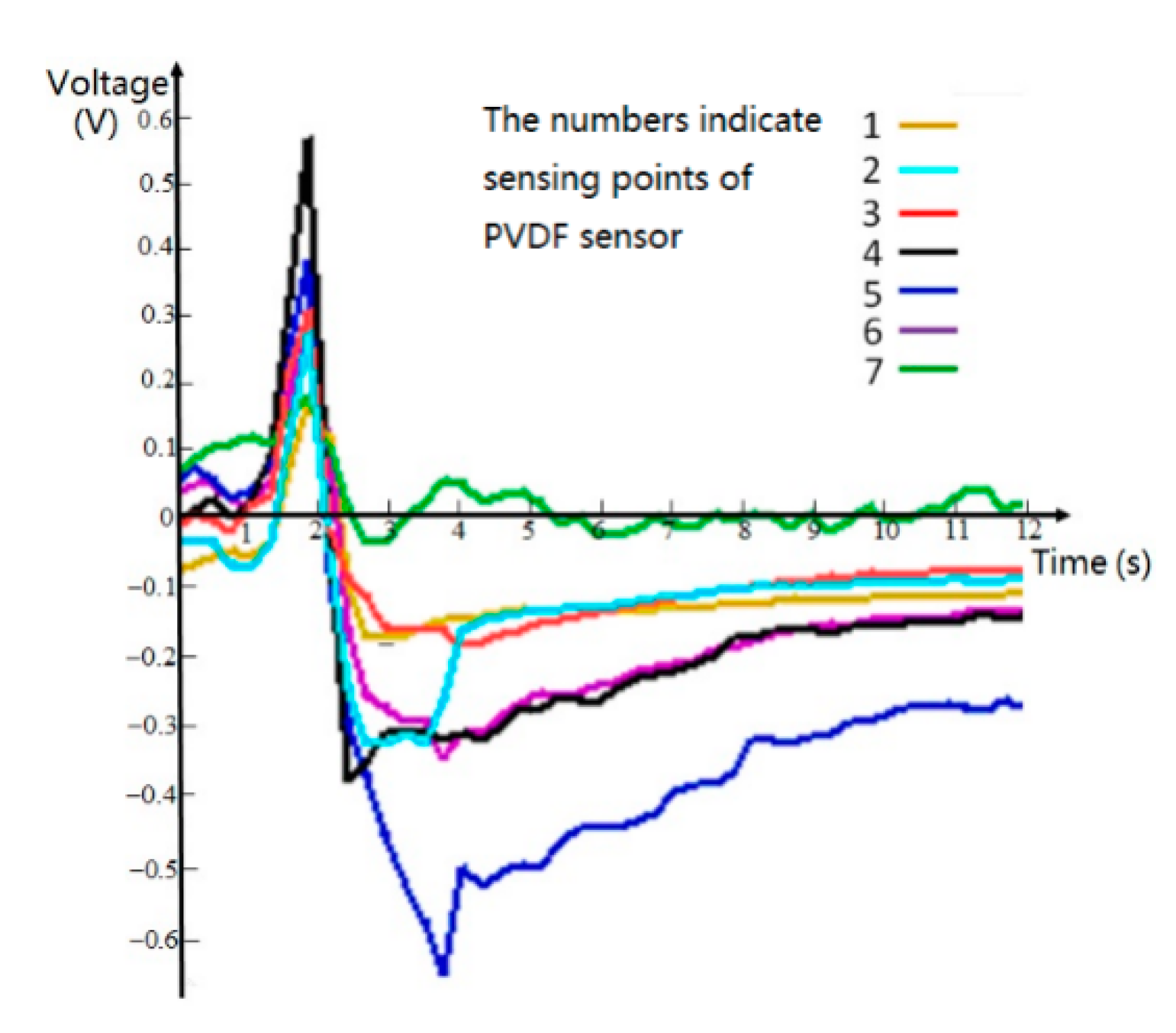
| PVDF Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Voltage(V) | 0.1918 | 0.3076 | 0.3767 | 0.5784 | 0.3805 | 0.3123 | 0.1993 |
| Number of Points | Root Mean Square Error of Curve Fitting (mm) | X Coordinate Error (mm) | Y Coordinate Error (mm) |
|---|---|---|---|
| 3 | 1.4364 | 4.26 | 1.69 |
| 4 | 1.2871 | 3.90 | 3.27 |
| 5 | 0.5999 | 2.16 | 1.09 |
| 6 | 0.4608 | 1.75 | 1.37 |
| 7 | 0.2991 | 1.25 | 0.70 |
| 8 | 0.2335 | 1.04 | 0.72 |
| 9 | 0.1781 | 0.86 | 0.45 |
| 10 | 0.1431 | 0.73 | 0.44 |
| 11 | 0.1160 | 0.62 | 0.30 |
| 12 | 0.0966 | 0.55 | 0.28 |
| 13 | 0.0841 | 0.51 | 0.20 |
| 14 | 0.0742 | 0.47 | 0.18 |
| 15 | 0.0661 | 0.43 | 0.13 |
| 16 | 0.0603 | 0.41 | 0.12 |
| 17 | 0.0548 | 0.39 | 0.09 |
| 18 | 0.0515 | 0.38 | 0.08 |
| 19 | 0.0459 | 0.35 | 0.06 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Yu, J.-X.; Zhang, C.-Y. Experimental Research on PVDF Sensing Surface Characteristic Curve Applied to Topography Perception. Micromachines 2020, 11, 976. https://doi.org/10.3390/mi11110976
Yu Z, Yu J-X, Zhang C-Y. Experimental Research on PVDF Sensing Surface Characteristic Curve Applied to Topography Perception. Micromachines. 2020; 11(11):976. https://doi.org/10.3390/mi11110976
Chicago/Turabian StyleYu, Zhen, Jing-Xian Yu, and Chen-Yang Zhang. 2020. "Experimental Research on PVDF Sensing Surface Characteristic Curve Applied to Topography Perception" Micromachines 11, no. 11: 976. https://doi.org/10.3390/mi11110976
APA StyleYu, Z., Yu, J.-X., & Zhang, C.-Y. (2020). Experimental Research on PVDF Sensing Surface Characteristic Curve Applied to Topography Perception. Micromachines, 11(11), 976. https://doi.org/10.3390/mi11110976