Microfluidic and Micromachined/MEMS Devices for Separation, Discrimination and Detection of Airborne Particles for Pollution Monitoring

Abstract
1. Introduction
2. Particle Separation Methods
2.1. Traditional Impactor-Based Designs and Definitions of Their Performance Characteristics
2.2. Cascade Impactors
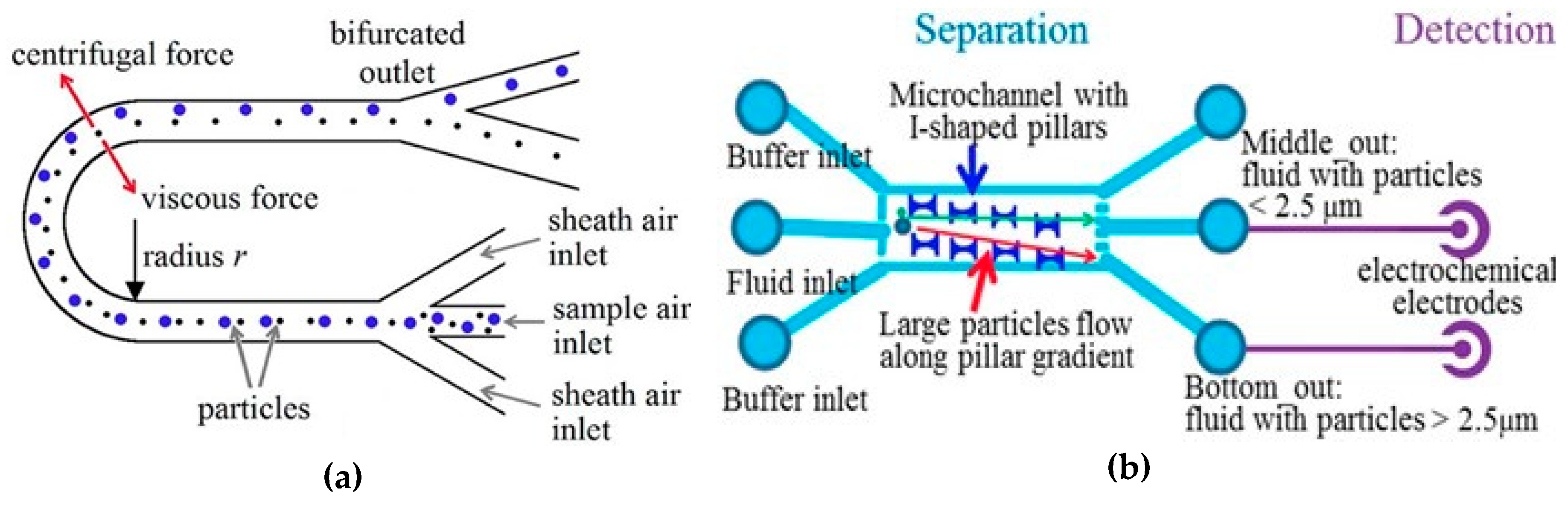
2.3. Other Particle Separation Techniques
3. Particle Detectors and Their Performance Characteristics
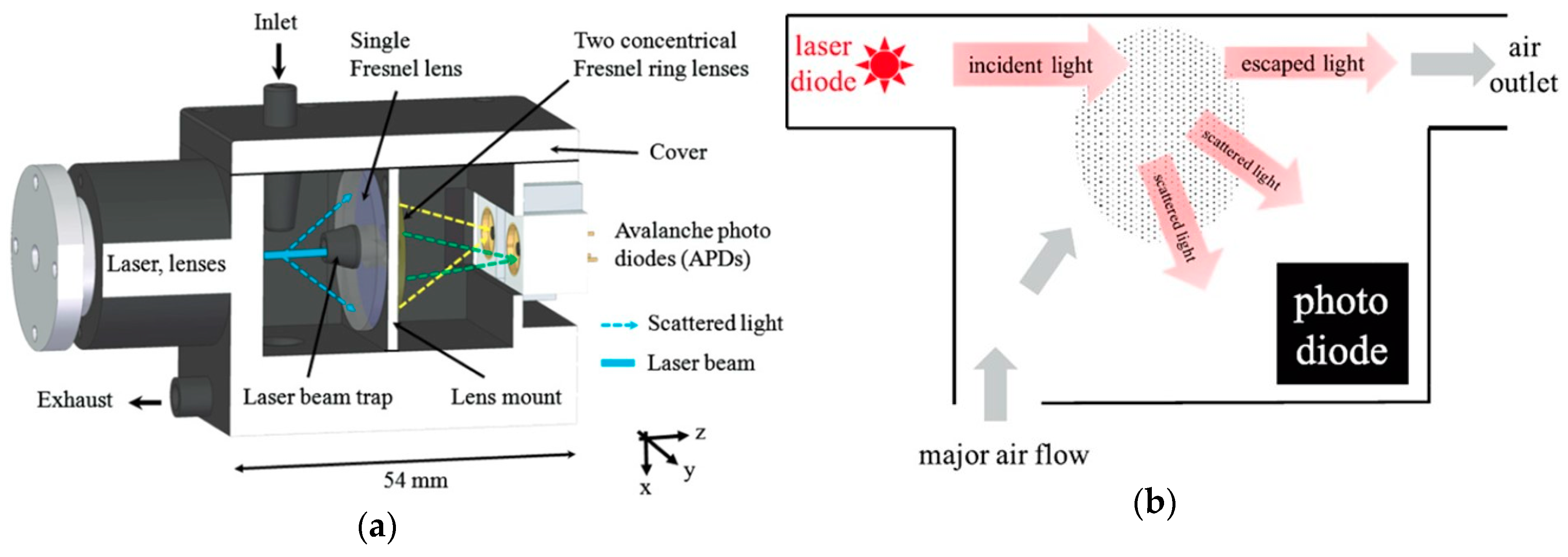
3.1. Optical Detectors
3.2. Electrical Detectors
3.2.1. Resonant Sensors
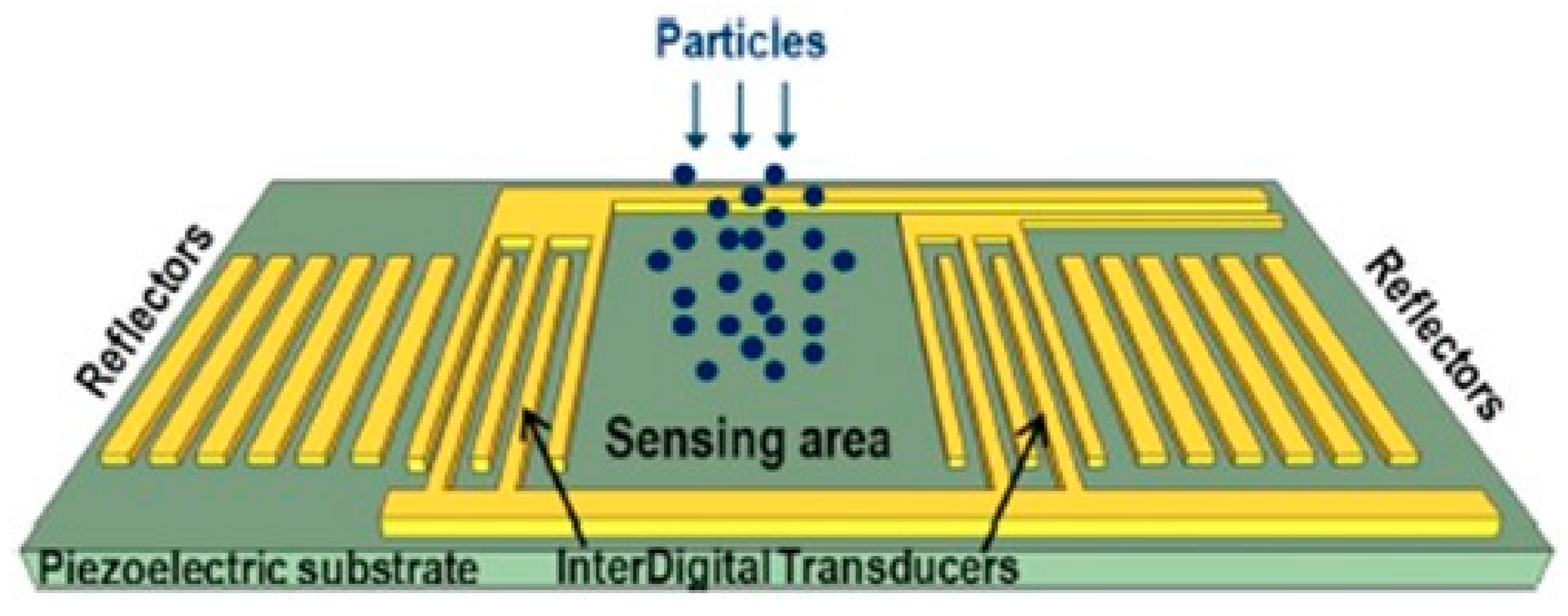
Quartz Crystal Microbalance (QCM) and Surface Acoustic Waves (SAW) Sensors
PM Detection Using Micromechanical Elements (Cantilevers, Membranes, etc.)
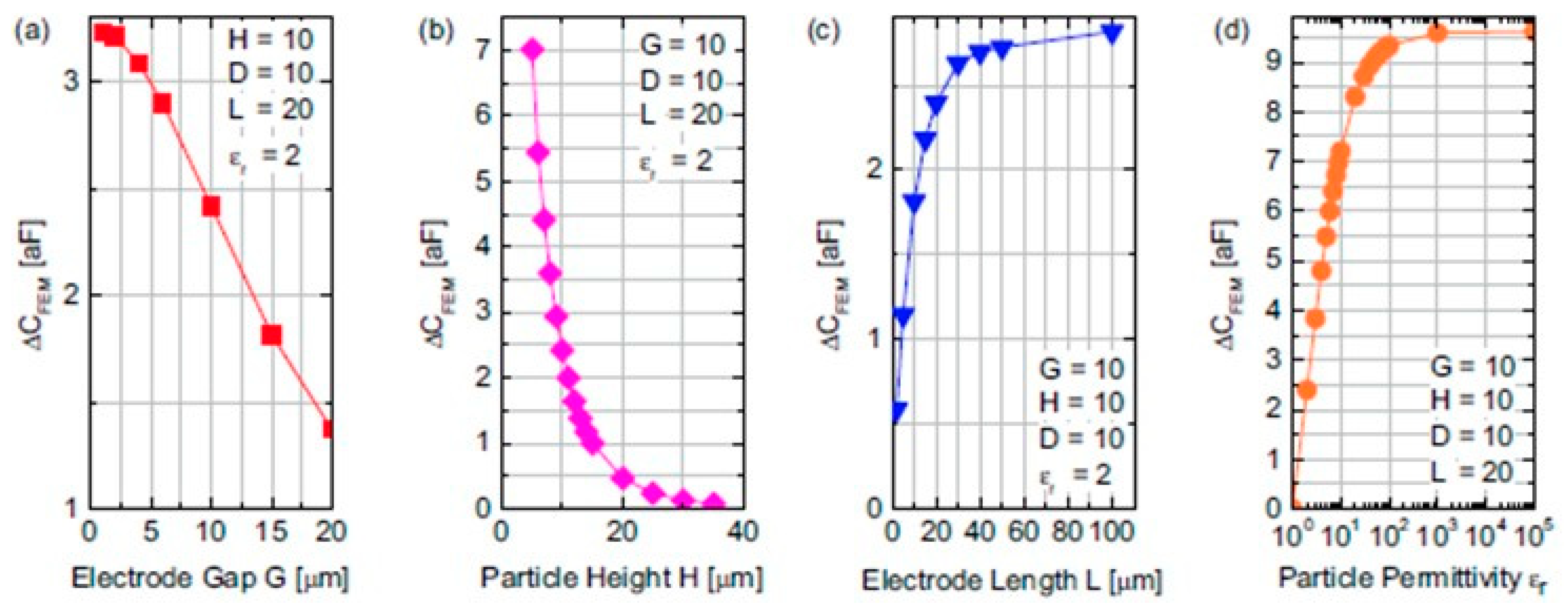
3.2.2. Capacitive Sensors
3.2.3. Impedance Sensors
3.2.4. Electrostatic Sensors
4. Conclusions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer and product | Particle sensing principle | Detected PM size ranges | Sensitivity | Accuracy | Resolution | Sampling interval | Info source: |
| AethLabs – microAeth®/ AE51 | PM collection on a replaceable filter strip + measure rate of change of optical absorption at 880 nm | Black Carbon (BC) monitor | ±0.1 μg BC/m3, 1 min avg., 150 mL/min flow rate | 0.001 μg/m3 | Timebases: 1, 5, 10, 30, 60 or 300 s | https://aethlabs.com/microaeth/ae51/tech-specs | |
| Alphasense - OPC-R1 | Scattering | 0.35 to 12.4 μm; Reports PM1, PM2.5, PM10 (PM4.25 as an option) | 1 to 30 s | Data sheet downloaded from http://www.alphasense.com/index.php/air/downloads/ | |||
| Dylos Corp. - DC1700 | Scattering | 2 size ranges (>0.5 and >2.5 μm) + PM2.5 and PM10 | http://www.dylosproducts.com/dcpmaqm.html | ||||
| Nova Fitness Co., Ltd. (PRC) - SDL-607 | Scattering | PM2.5 and PM10, in the range up to 999.9 μg/m3; Min. particle diam. = 0.3 μm | Rel. error is max. of 20% and ±30 μg/m3 at 25oC, 50%RH | 0.1 μg/m3 | 1 min. every 5 min. | Data sheet downloaded from http://inovafitness.com/en/a/Detectors/2017/0327/90.html | |
| Plantower PMS 3003 | Scattering | 0.3 to 1 μm; 1 to 2.5 μm; 2.5 to 10 μm, all for effective concentration up to 500 μg/m3. Min. particle diam. = 0.3 μm | Maximum consistency error: ±10% in the range 100 to 500 μg/m³; ±10 μg/m³ in the range 0 to 100 μg/m³ | 1 μg/m3 | < 10 s | http://www.aqmd.gov/docs/default-source/aq-spec/resources-page/plantower-pms5003-manual_v2-3.pdf | |
| Manufacturer and product | Particle sensing principle | Detected PM size ranges | Sensitivity | Accuracy | Resolution | Response time/Sampling interval | Info source: |
| MetOne Instruments Inc. AEROCET 531S Particle Mass Profiler and Counter 831 Aerosol Mass Monitor GT-526S Handheld Particle Counter | Scattering Scattering Scattering | PM1, PM2.5, PM4, PM7, PM10, and total suspended particles (TSP), with concentration up to 1,000 μg/m3 PM1, PM2.5, PM4 and PM10, with concentration up to 1,000 μg/m3 0.3 μm - 10 μm in 6 channels, with concentration range of up to 3,000,000 particles per cubic foot (105,900 particle/L) | High = 0.3 μm, Low = 0.5 μm 0.5 μm | Size accuracy: ± 10% Size accuracy: ± 10%Size accuracy: ± 10% | 0.1 μg/m3 | Sampling interval = 1 min Sampling interval = 1 min Adjustable sampling time: 1 to 999 seconds | https://metone.com/products/aerocet-531s-handheld-particle-counter/ and the product specs which can be downloaded from there https://metone.com/products/aerocet-831-handheld-particle-counter/ and the product specs which can be downloaded from there https://metone.com/products/gt-526s-handheld-particle-counter/ and the product specs which can be downloaded from there |
| Samyoung PM 2.5 sensor | Scattering | ≥ 0.3 μm (improved detection capability in the range 0.3 μm‒1 μm), for concentrations up to 500 μg/m3 | ±25 μg in the range 0‒100 μg/m3; ±25% in the range 100‒500 μg/m3 | Response time = 1 s | http://samyoungsnc.com/particle-sensor/ | ||
| Telaire SM-UART-04L | Scattering | 0.3 μm‒10 μm, with concentration range of up to 999 μg/m3 | ±10 μg @ 0…100 μg/m3; ±10% @ 100‒999 μg/m3 | 1 μg/m3 | Response time = 1 s | https://www.amphenol-sensors.com/en/telaire/dust-sensors/3393-sm-uart-04l | |
| Manufacturer and sensor | Particle sensing principle | Detected PM size ranges | Sensitivity | Accuracy | Resolution | Response time/Sampling interval | Info source: |
| Lighthouse Worldwide Solutions 3016 IAQ (mass concentration) | Scattering | 0.3‒25 μm; 6 standard channels, with concentration of up to 8,000,000 particles per cubic foot | Counting efficiency: 50% @ 0.3 μm particle size, and 100% for particles >0.75 μm (per ISO 21501-4) | https://www.golighthouse.com/en/airborne-particle-counters/handheld-3016-iaq and the datasheet which can be downloaded from there | |||
| Thermo Fisher Scientific pDR-1500 | Scattering | 1‒10 μm, with concentration of up to 0.001 to 400 mg/m3 (auto ranging) | ±5% of reading ± precision (traceable to SAE fine dust test). Precision/repeatability over 30 days: ± 2% of reading or ± 0.005 mg/m3, whichever is larger, for 1 s (2-σ) averaging time; ± 0.5 of reading or ± 0.0015 mg/m3, whichever is larger, for 10 s averaging time; ± 0.2% of reading or ± 0.0005 mg/m3, whichever is larger, for 60 s averaging time | Concentration display averaging time: 1 to 60 s (user selectable) | https://www.thermofisher.com/order/catalog/product/PDR1500?SID=srch-srp-PDR1500 and the specification sheet which can be downloaded from there | ||
| Manufacturer and sensor | Particle sensing principle | Detected PM size ranges | Sensitivity | Accuracy | Resolution | Response time/ Sampling interval | Info source: |
| Shinyei PM sensor Large particle sensor | Scattering Scattering | PM2.5 >10 μm | https://www.shinyei.co.jp/stc/eng/optical/main_pm2.html https://www.shinyei.co.jp/stc/eng/optical/main_particle.html | ||||
| SHARP GP2Y1026AU0F GP2Y1030AU0F | Scattering Scattering | >0.5 μm, for concentrations up to 1,000 μg/m3 >0.5 μm, for concentrations up to 500 μg/m3 (* says up to 240); discriminates between PM2.5 and PM10; internal cleaning possible | 0.35±0.06 V/ (0.1 mg/m3) 1 V/ (0.1 mg/m3) | ±15% ±15% | Response time = 1 s | http://www.sharp-world.com/products/device/lineup/selection/opto/dust/index.html and some specifications in the application guide at https://www.mouser.com/catalog/additional/Sharp_Microelectronics_Application_Guide_for_Sharp_GP2Y1026AU0F_Dust_Sensor.pdf http://www.sharp-world.com/products/device/lineup/selection/opto/dust/index.html and *https://www.sharpsde.com/products/optoelectronic-components/model/GP2Y1030AU0F/ | |
| PHILIPS Aerasense NanoTracer | Electrostatic | Fast mode: 20-120 nm; Advanced mode: 10‒300 nm; min. concentration of 1800 particles/cm3, up to 106 particles/cm3 | For particle concentration: SN = 900 particles/ (cm3.fA), and for size measurement Sdp = 20.2 nm – see eqn.s (15) & (17) in [80]. | 11 nm at N = 10,000 particles/cm3, dp,av = 50 nm, and ΔI = 1 fA [80] | Response time- Fast mode = 3 s; Advanced mode = 16 s. | http://www.aerasense.com/index.php?pageID=3 and http://www.aerasense.com/content/File/Philips%20NanoTracer.pdf Also see ref.s [13,79,80] |
References
- Air Sensor Guidebook. U.S. Environmental Protection Agency (EPA). Available online: https://cfpub.epa.gov/si/si_public_file_download.cfm?p_download_id=519616 (accessed on 11 July 2019).
- Directive 2008/50/EC of the European Parliament and of the Council of 21 May 2008 on Ambient Air Quality and Cleaner Air for Europe. OJ L 152. 11.6.2008. p. 1–44. Available online: https://eur-lex.europa.eu/legal-content/en/TXT/?uri=CELEX:32008L0050 (accessed on 11 July 2019).
- Budde, M.; Busse, M.; Beigl, M. Investigating the Use of Commodity Dust Sensors for the Embedded Measurement of Particulate Matter. In Proceedings of the IEEE 2012 Ninth International Conference on Networked Sensing (INSS), Antwerp, Belgium, 11–14 June 2012. [Google Scholar]
- Particulate Matter. Available online: https://www.citepa.org/en/air-and-climate/pollutants-and-ghg/particulate-matter (accessed on 11 July 2019).
- Chatterjee, P. What Does PM 1 Mean? Available online: https://indianexpress.com/article/explained/what-does-pm-1-mean (accessed on 11 July 2019).
- Seaton, A.; MacNee, W.; Donaldson, K.; Godden, D. Particulate air pollution and acute health effects. Lancet 1995, 345, 176–178. [Google Scholar] [CrossRef]
- Kunzli, N.; Kaiser, R.; Medina, S.; Studnicka, C.; Filliger, P.; Herry, M.; Horak, F. Public impact of outdoor and traffic-related air pollution: A European assessment. Lancet 2000, 356, 795–801. [Google Scholar] [CrossRef]
- Raaschou-Nielsen, O.; Andersen, Z.J.; Beelen, R.; Samoli, E.; Stafoggia, M.; Weinmayr, G.; Hoffmann, B.; Fischer, P.; Nieuwenhuijsen, M.J.; Brunekreef, B.; et al. Air pollution and lung cancer incidence in 17 European cohorts: Prospective analyses from the European study of cohorts for air pollution effects (ESCAPE). Lancet Oncol. 2013, 14, 813–822. [Google Scholar] [CrossRef]
- Farina, F.; Sancini, G.; Battaglia, C.; Tinaglia, V.; Mantecca, P.; Camatini, M.; Palestini, P. Milano summer particulate matter (PM10) triggers lung inflammation and extra pulmonary adverse events in mice. PLoS ONE 2013, 8, e56636. [Google Scholar] [CrossRef] [PubMed]
- Polichetti, G.; Cocco, S.; Spinali, A.; Trimarco, V.; Nunziata, A. Effects of particulate matter (PM10, PM2.5 and PM1) on the cardiovascular system. Toxicology 2009, 261, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Air Quality Guidelines—Global Update 2005. Available online: http://www.who.int/phe/health_topics/outdoorair/outdoorair_aqg/en (accessed on 11 July 2019).
- National Ambient Air Quality Standards (NAAQS). Available online: https://www.epa.gov/criteria-air-pollutants/naaqs-table (accessed on 11 July 2019).
- Carminati, M.; Ferrari, G.; Sampietro, M. Emerging miniaturized technologies for airborne particulate matter pervasive monitoring. Measurement 2017, 101, 250–256. [Google Scholar] [CrossRef]
- Schrobenhauser, R.; Strzoda, R.; Fleischer, M.; Hartmann, A.; Amann, M.-C. Detection of the mass of fine particulate matter using light scattering and inertial filtering in a miniaturized sensor setup. Meas. Sci. Technol. 2014, 25, 035103. [Google Scholar] [CrossRef]
- Marple, V.A.; Willeke, K. Impactor design. Atmos. Environ. 1976, 10, 891–896. [Google Scholar] [CrossRef]
- Marple, V.A.; Rubow, K.L.; Turner, W.; Spengler, J.D. Low Flow Rate Sharp Cut Impactors for Indoor Air Sampling: Design and Calibration. Japca 1987, 37, 1303–1307. [Google Scholar] [CrossRef]
- Chen, B.T.; Yeh, H.C. An improved virtual impactor: Design and performance. J. Aerosol Sci. 1987, 18, 203–214. [Google Scholar] [CrossRef]
- Chen, H.-Y.; Huang, H.-L. Numerical and experimental study of virtual impactor design and aerosol separation. J. Aerosol Sci. 2016, 94, 43–55. [Google Scholar] [CrossRef]
- Kim, M.C.; Lee, K.W. Design Modification of Virtual Impactor for Enhancing Particle Concentration Performance. Aerosol Sci. Technol. 2000, 32, 233–242. [Google Scholar] [CrossRef]
- Chang, P.-K.; Hsiao, T.-C.; Engling, G.; Chen, J.-C. Computational fluid dynamics study of the effects of flow and geometry parameters on a linear-slit virtual impactor for sampling and concentrating aerosols. J. Aerosol Sci. 2019, 131, 28–40. [Google Scholar] [CrossRef]
- Paprotny, I.; Doering, F.; Solomon, P.A.; White, R.M.; Gundel, L.A. Microfabricated air-microfluidic sensor for personal monitoring of airborne particulate matter: Design, fabrication, and experimental results. Sens. Actuators A 2013, 201, 506–516. [Google Scholar] [CrossRef]
- Kim, Y.H.; Park, S.; Lim, M.H.; Hwang, J.; Shin, J.S.; Kim, Y.J. A Virtual Impactor for Hydrodynamic Particle Classification. In Proceedings of the 2007 International Solid-State Sensors, Actuators and Microsystems Conference—TRANSDUCERS 2007, Lyon, France, 10–14 June 2007; pp. 2231–2234. [Google Scholar]
- Luo, Y.; Sheng, Y.; Jiao, Z.; Deng, Y. Microfluidic system for fine particulate matter separation and sampling. In Proceedings of the 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–22 August 2016; pp. 487–492. [Google Scholar]
- Park, D.; Kim, Y.-H.; Park, C.W.; Hwang, J.; Kim, Y.-J. New bio-aerosol collector using a micromachined virtual impactor. J. Aerosol Sci. 2009, 40, 415–422. [Google Scholar] [CrossRef]
- Sun, J.; Yang, K.; Liu, Z.; Lu, Y. A system of continuous particles monitoring using virtual impactor. In Proceedings of the 12th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Qingdao, China, 16–18 July 2015; pp. 1183–1187. [Google Scholar]
- Sun, J.; Liu, Z.; Yang, K.; Lu, Y. A miniature system for particulate matter (PM) measurement. In Proceedings of the 2015 IEEE Sensors International Conference, Busan, Korea, 1–4 November 2015; pp. 1–4. [Google Scholar]
- Kim, Y.H.; Park, D.; Hwang, J.; Kim, Y.J. Electrically tunable airborne particle classifier using a virtual impactor. In Proceedings of the IEEE 21st International Conference on Micro Electro Mechanical Systems (MEMS), Wuhan, China, 13–17 January 2008; pp. 547–550. [Google Scholar]
- Kim, Y.-H.; Park, D.; Hwang, J.; Kim, Y.-J. A hybrid chip based on aerodynamics and electrostatics for the size-dependent classification of ultrafine and nano particles. Lab Chip 2009, 9, 2722–2728. [Google Scholar] [CrossRef]
- Kim, Y.-H.; Kwon, S.-m.; Park, D.; Hwang, J.; Kim, Y.-J. Classification and Condensation of Nano-Sized Airborne Particles by Electrically Tuning Collection Size. In Proceedings of the IEEE 22nd International Conference on Micro Electro Mechanical Systems (MEMS), Sorrento, Italy, 25–29 January 2009; pp. 387–390. [Google Scholar]
- Newton, G.J.; Rabe, O.G.; Mokler, B.V. Cascade impactor design and performance. J. Aerosol Sci. 1977, 8, 339–347. [Google Scholar] [CrossRef]
- Maldonado-Garcia, M.; Kumar, V.; Pourkamali, S.; Wilson, J.C. Miniaturized two stage aerosol impactor with chip-scale stages for airborne particulate size separation. In Proceedings of the 2015 IEEE Sensors International Conference, Busan, Korea, 1–4 November 2014; pp. 1–4. [Google Scholar]
- Maeng, J.-Y.; Park, D.; Kim, Y.-H.; Hwang, J.; Kim, Y.-J. Micromachined cascade virtual impactor for aerodynamic size classification of airborne particles. In Proceedings of the IEEE 20th International Conference on Micro Electro Mechanical Systems (MEMS), Hyogo, Japan, 21–25 January 2007; pp. 619–622. [Google Scholar]
- Kim, Y.-H.; Maeng, J.-Y.; Park, D.; Jung, I.-H.; Hwang, J.; Kima, Y.-J. Micromachined cascade virtual impactor with a flow rate distributor for wide range airborne particle classification. Appl. Phys. Lett. 2007, 91, 043512. [Google Scholar] [CrossRef]
- Kang, J.S.; Lee, K.S.; Lee, K.H.; Sung, H.J.; Kim, S.S. Characterization of a Microscale Cascade Impactor. Aerosol Sci. Technol. 2012, 46, 966–972. [Google Scholar] [CrossRef]
- Lindsley, W.G.; Green, B.J.; Blachere, F.M.; Martin, S.B.; Law, B.F.; Jensen, P.A.; Schafer, M. Sampling and characterization of bioaerosols. In National Institute for Occupational Safety and Health (NIOSH) Manual of Analytical Methods, 5th ed.; Ashley, K., O’Connor, P.F., Eds.; Dept. of health and human services, Centers for Disease Control and Prevention, National Institute for Occupational Safety and Health: Cincinnati, OH, USA, 2017; Chapter BA. [Google Scholar]
- Marple, V.A.; Rubow, K.L.; Behm, S.M. A Microorifice Uniform Deposit Impactor (MOUDI): Description, Calibration, and Use. Aerosol Sci. Technol. 1991, 14, 434–446. [Google Scholar] [CrossRef]
- Schaap, A.M.; Chu, W.C.; Stoeber, B. Continuous Size-Separation of Airborne Particles in a Microchannel for Aerosol Monitoring. IEEE Sens. J. 2011, 11, 2790–2797. [Google Scholar] [CrossRef]
- Yin, H.; Wan, H.; Mason, A.J. Separation and electrochemical detection platform for portable individual PM2.5 monitoring. In Proceedings of the 2017 IEEE International Symposium on Circuits and Systems (ISCAS), Baltimore, MD, USA, 28–31 May 2017. [Google Scholar]
- Huang, L.R.; Cox, E.C.; Austin, R.H.; Sturm, J.C. Continuous Particle Separation through Deterministic Lateral Displacement. Science 2004, 304, 987–990. [Google Scholar] [CrossRef]
- Zeming, K.K.; Ranjan, S.; Zhang, Y. Rotational separation of non-spherical bioparticles using I-shaped pillar arrays in a microfluidic device. Nat. Commun. 2013, 4, 1625. [Google Scholar] [CrossRef]
- Kuo, F.-Y.; Lin, Y.-C.; Ke, L.-Y.; Tsai, C.-J.; Yao, D.-J. Detection of Particulate Matter of Size 2.5 μm with a Surface-Acoustic-Wave Sensor Combined with a Cyclone Separator. Micromachines 2018, 9, 398. [Google Scholar] [CrossRef]
- Fraden, J. Handbook of Modern Sensors, 5th ed.; Springer: New York, NY, USA, 2016; pp. 2–47. [Google Scholar]
- Schrobenhauser, R.; Strzoda, R.; Hartmann, A.; Fleischer, M.; Amann, M.-C. Miniaturized sensor for particles in air using Fresnel ring lenses and an enhanced intensity ratio technique. Appl. Opt. 2014, 53, 625–633. [Google Scholar] [CrossRef]
- Yuen, L.; Chu, W.C.; Stoeber, B. Microfluidic-based real-time detector for fine particulate matter. In Proceedings of the 2014 IEEE SENSORS International Conference, Valencia, Spain, 2–5 November 2014; pp. 775–778. [Google Scholar]
- Li, X.; Iervolino, E.; Santagata, F.; Wei, J.; Yuan, C.A.; Sarro, P.M.; Zhang, G.Q. Miniaturized particulate matter sensor for portable air quality monitoring devices. In Proceedings of the 2014 IEEE Sensors Conference, Valencia, Spain, 2–5 November 2014; p. 14. [Google Scholar]
- Dong, M.; Iervolino, E.; Santagata, F.; Zhang, G.; Zhang, G. Silicon microfabrication based particulate matter sensor. Sens. Actuators A 2016, 247, 115–124. [Google Scholar] [CrossRef]
- Dong, M.; Iervolino, E.; Santagata, F.; Zhang, G.; Zhang, G. Integrated Virtual Impactor Enabled PM2.5 Sensor. IEEE Sens. J. 2017, 17, 2814–2821. [Google Scholar] [CrossRef]
- Thomas, S.; Cole, M.; Villa-López, F.H.; Gardner, J.W. High frequency surface acoustic wave resonator-based sensor for particulate matter detection. Sens. Actuators A 2016, 244, 138–145. [Google Scholar] [CrossRef]
- Abe, T.; Esashi, M. One-chip multichannel quartz crystal microbalance (QCM) fabricated by Deep RIE. Sens. Actuators A 2000, 82, 139–143. [Google Scholar] [CrossRef]
- Nardi, D.; Zagato, E.; Ferrini, G.; Giannetti, C.; Banfi, F. Design of a surface acoustic wave mass sensor in the 100 GHz range. Appl. Phys. Lett. 2012, 100, 253106. [Google Scholar] [CrossRef]
- Rhoa, K.; Zurn, S.; Markus, D.; Polla, D.L. Integration of a CMOS Preamplifier with a Lead Zirconate Titanate Resonant Frequency Microsensor. J. Electrochem. Soc. 2002, 149, J53–J57. [Google Scholar] [CrossRef]
- Fu, Y.Q.; Cherng, J.S.; Luo, J.K.; Desmulliez, M.P.Y.; Li, Y.; Walton, A.J.; Placido, F. Aluminium nitride thin film acoustic wave device for microfluidic and biosensing applications. In Acoustic Waves; Dissanayake, D., Ed.; InTech Open: Rijeka, Croatia, 2010; Chapter 12; p. 466. [Google Scholar]
- Campanella, H.; Khine, L.; Tsai, J.M. Aluminum nitride Lamb-wave resonators for high-power high-frequency applications. IEEE Electron Device Lett. 2013, 34, 316–318. [Google Scholar] [CrossRef]
- Yantchev, V.; Katardjiev, I. Thin film Lamb wave resonators in frequency control and sensing applications: A review. J. Micromech. Microeng. 2013, 23, 043001. [Google Scholar] [CrossRef]
- Yunhong, H.; Meng, Z.; Guowei, H.; Chaowei, S.; Yongmei, Z.; Jin, N. A review: Aluminum nitride MEMS contour-mode resonator. J. Semicond. 2016, 37, 101001. [Google Scholar]
- Bretos, I.; Jiménez, R.; Tomczyk, M.; Rodríguez-Castellón, E.; Vilarinho, P.M.; Calzada, M.L. Active layers of high-performance lead zirconate titanate at temperatures compatible with silicon nano- and microelectronic devices. Sci. Rep. 2016, 6, 20143. [Google Scholar] [CrossRef]
- Zampetti, E.; Macagnano, A.; Papa, P.; Bearzotti, A.; Petracchini, F.; Paciucci, L.; Pirrone, N. Exploitation of an integrated microheater on QCM sensor in particulate matter measurements. Sens. Actuators A 2017, 264, 205–211. [Google Scholar] [CrossRef]
- Djoumi, L.; Patissier, V.B.; Vanotti, M.; Appert-Collin, J.-C.; Thomas, D.; Fertier, L. Surface Acoustic Wave Sensors for PM2.5 and PM10 Concentration. Procedia Eng. 2016, 168, 696–699. [Google Scholar] [CrossRef]
- Thomas, S.; Cole, M.; Villa-López, F.H.; Gardner, J.W.; Peters, J.; Theunis, J. A low-cost acoustic microsensor based system in package for air quality monitoring. In Proceedings of the 2016 IEEE Sensors International Conference, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- Chiriacò, M.S.; Rizzato, S.; Primiceri, E.; Spagnolo, S.; Monteduro, A.G.; Ferrara, F.; Maruccio, G. Optimization of SAW and EIS sensors suitable for environmental particulate monitoring. Microelectron. Eng. 2018, 202, 31–36. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, M.; Wang, W.; Xie, J. Airborne particulate matter classification and concentration detection based on 3D printed virtual impactor and quartz crystal microbalance sensor. In Proceedings of the IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 824–827. [Google Scholar]
- Zhao, J.; Liu, M.; Liang, L.; Wang, W.; Xie, J. Airborne particulate matter classification and concentration detection based on 3D printed virtual impactor and quartz crystal microbalance sensor. Sens. Actuators A 2016, 238, 379–388. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Liu, X.; Chen, D.; Wu, C.; Xie, J. A Miniature System for Classification and Concentration Detection of PM Based on 3D Printed Virtual Impactor and QCM Sensor. In Proceedings of the 2018 IEEE 13th Annual International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Singapore, 22–26 April 2018; pp. 471–474. [Google Scholar]
- Wang, Y.; Wang, Y.; Chen, D.; Liu, X.; Wu, C.; Xie, J. A Miniature System for Separation and Detection of PM Based on 3-D Printed Virtual Impactor and QCM Sensor. IEEE Sens. J. 2018, 18, 6130–6137. [Google Scholar] [CrossRef]
- Hao, W.-C.; Nie, Z.; Liu, J.-L.; Liu, M.-H.; He, S.-T. Advances in a developed surface acoustic wave based particulate matter 2.5 monitor. In Proceedings of the 2016 IEEE Symposium on Piezoelectricity, Acoustic Waves, and Device Applications (SPAWDA), Xi’an, China, 21–24 October 2016; pp. 227–229. [Google Scholar]
- Liu, J.; Hao, W.; Liu, M.; Liang, Y.; He, S. A Novel Particulate Matter 2.5 Sensor Based on Surface Acoustic Wave Technology. Appl. Sci. 2018, 8, 82. [Google Scholar] [CrossRef]
- Wasisto, H.S.; Merzsch, S.; Steib, F.; Waag, A.; Peiner, E. In-Plane-Excited Silicon Nanowire Arrays-Patterned Cantilever Sensors for Enhanced Airborne Particulate Matter Exposure Detection. In Proceedings of the 9th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Waikiki Beach, HI, USA, 13–16 April 2014; pp. 32–37. [Google Scholar]
- Merzsch, S.; Wasisto, H.S.; Waag, A.; Kirsch, I.; Uhde, E.; Salthammer, T.; Peiner, E. Low-weight electrostatic sampler for airborne nanoparticles. In Proceedings of the 2011 IEEE Sensors Conference, Limerick, Ireland, 28–31 October 2011; pp. 1177–1180. [Google Scholar]
- Wasisto, H.S.; Merzsch, S.; Uhde, E.; Waag, A.; Peiner, E. Handheld personal airborne nanoparticle detector based on microelectromechanical silicon resonant cantilever. Microelectron. Eng. 2015, 145, 96–103. [Google Scholar] [CrossRef]
- Bertke, M.; Wu, W.; Wasisto, H.S.; Uhde, E.; Peiner, E. Size-selective electrostatic sampling and removal of nanoparticles on silicon cantilever sensors for air-quality monitoring. In Proceedings of the 19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017; pp. 1493–1496. [Google Scholar]
- Wasisto, H.S.; Merzsch, S.; Stranz, A.; Waag, A.; Uhde, E.; Salthammer, T.; Peiner, E. Silicon resonant nanopillar sensors for airborne titanium dioxide engineered nanoparticle mass detection. Sens. Actuators B 2013, 189, 146–156. [Google Scholar] [CrossRef]
- Schmid, S.; Kurek, M.; Adolphsen, J.Q.; Boisen, A. Real-time single airborne nanoparticle detection with nanomechanical resonant filter-fiber. Sci. Rep. 2013, 3, 1288. [Google Scholar] [CrossRef]
- Carminati, M.; Pedalà, L.; Bianchi, E.; Nason, F.; Dubini, G.; Cortelezzi, L.; Ferrari, G.; Sampietro, M. Capacitive detection of micrometric airborne particulate matter for solid-state personal air quality monitors. Sens. Actuators A 2014, 219, 80–87. [Google Scholar] [CrossRef]
- Ciccarella, P.; Carminati, M.; Sampietro, M.; Ferrari, G. CMOS monolithic airborne-particulate-matter detector based on 32 capacitive sensors with a resolution of 65zF rms. In Proceedings of the 2016 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 31 January–4 February 2016; pp. 486–488. [Google Scholar]
- Ciccarella, P.; Carminati, M.; Sampietro, M.; Ferrari, G. Multichannel 65 zF rms Resolution CMOS Monolithic Capacitive Sensor for Counting Single Micrometer-Sized Airborne Particles on Chip. IEEE J. Solid State Circ. 2016, 51, 2545–2553. [Google Scholar] [CrossRef]
- Carminati, M.; Ferrari, G.; Guagliardo, F.; Sampietro, M. ZeptoFarad capacitance detection with a miniaturized CMOS current front-end for nanoscale sensors. Sens. Actuators A 2011, 172, 117–123. [Google Scholar] [CrossRef]
- Chiang, C.-T.; Huang, S.-W.; Liu, G.-X. A CMOS Particulate Matter 2.5 (PM2.5) Concentration to Frequency Converter with Calibration Circuits for Air Quality Monitoring Applications. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 966–970. [Google Scholar]
- Forouhi, S.; Farhanieh, O.; Dehghani, R.; Ghafar-Zadeh, E. A Current Based Capacitance-to-Frequency Converter for Lab-on-Chip Applications. In Proceedings of the IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; pp. 92–95. [Google Scholar]
- Marra, J.; Brink, W.; van den Goosens, H.; Kessels, S. Nanoparticle Monitoring for Exposure Assessment. IEEE Nanotechnol. Mag. 2009, 3, 6–37. [Google Scholar] [CrossRef]
- Marra, J.; Voets, M.; Kiesling, H.-J. Monitor for detecting and assessing exposure to airborne nanoparticles. J. Nanopart. Res. 2010, 12, 21–37. [Google Scholar] [CrossRef]
- Lim, H.H.; Park, D.; Maeng, J.Y.; Hwang, J.; Kim, Y.J. MEMS Based Integrated Particle Detection Chip for Real Time Environmental Monitoring. In Proceedings of the 19th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Istanbul, Turkey, 22–26 January 2006; pp. 62–65. [Google Scholar]
- Kim, Y.-H.; Park, D.; Hwang, J.; Kim, Y.-J. Integrated particle detection chip for environmental monitoring. Lab Chip 2008, 8, 1950–1956. [Google Scholar] [CrossRef]
- Park, D.; Kim, Y.-H.; Lee, S.-G.; Kim, C.; Hwang, J.; Kim, Y.-J. Development and performance test of a micromachined unipolar charger for measurements of submicron aerosol particles having a log-normal size distribution. J. Aerosol Sci. 2010, 41, 490–500. [Google Scholar] [CrossRef]
- Heat wave scorches Sweden as wildfires rage in Arctic Circle. The Straits Times, 21 July 2018; A35.
- Monster California fire rages on after killing firefighters. The Sunday Times, 29 July 2018; A22.
- Wildfire kills 74 in Greece, including families with kids. The Straits Times, 25 July 2018; A14.
- Biggest wildfire in California history rages on. The Straits Times, 8 July 2018; A20.
- Melnick, D.J.; Pearl, M.C.; Cochrane, M.A. Furnace Earth: Wildfires set to worsen. The Straits Times, 10 August 2018; A20. [Google Scholar]
- Hundreds evacuated as forest fire spreads near Berlin. The Straits Times, 25 August 2018; A26.
- Stars flee homes as Malibu fire spreads. The Sunday Times, 11 November 2018; A10.
- NZ village ‘in hands of God’ as bush fire threatens houses. The Sunday Times, 10 February 2019; A20.
- NZ forest fires spreading, forcing residents to flee their homes. The Straits Times, 11 February 2019; A13.
- Aussie firefighters battle 25 blazes in Victoria amid heatwave. The Straits Times, 4 March 2019; A6.
- National disaster declared as S. Korea fights forest fire. The Straits Times, 6 April 2019; A14.
- Parts of Malaysia hit by unhealthy levels of haze. The Straits Times, 17 August 2018; A4.
- Monbiot, G. Indonesia is burning. So why is the world looking away? Available online: https://www.theguardian.com/commentisfree/2015/oct/30/indonesia-fires-disaster-21st-century-world-media (accessed on 11 July 2019).
- Balch, O. Indonesia’s Forest Fires: Everything You Need to Know. 11 November 2015. Available online: https://www.theguardian.com/sustainable-business/2015/nov/11/indonesia-forest-fires-explained-haze-palm-oil-timber-burning (accessed on 11 July 2019).









© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Poenar, D.P. Microfluidic and Micromachined/MEMS Devices for Separation, Discrimination and Detection of Airborne Particles for Pollution Monitoring. Micromachines 2019, 10, 483. https://doi.org/10.3390/mi10070483
Poenar DP. Microfluidic and Micromachined/MEMS Devices for Separation, Discrimination and Detection of Airborne Particles for Pollution Monitoring. Micromachines. 2019; 10(7):483. https://doi.org/10.3390/mi10070483
Chicago/Turabian StylePoenar, Daniel Puiu. 2019. "Microfluidic and Micromachined/MEMS Devices for Separation, Discrimination and Detection of Airborne Particles for Pollution Monitoring" Micromachines 10, no. 7: 483. https://doi.org/10.3390/mi10070483
APA StylePoenar, D. P. (2019). Microfluidic and Micromachined/MEMS Devices for Separation, Discrimination and Detection of Airborne Particles for Pollution Monitoring. Micromachines, 10(7), 483. https://doi.org/10.3390/mi10070483