Anisotropic Vibration Tactile Model and Human Factor Analysis for a Piezoelectric Tactile Feedback Device



Abstract
1. Introduction
2. Principle
3. Analysis for Anisotropic Vibrating Tactile Models
3.1. Analysis for Full-Coverage Anisotropic Vibration Tactile Model
3.2. Analysis for Anisotropic Vibration Tactile Model in Local-Coverage
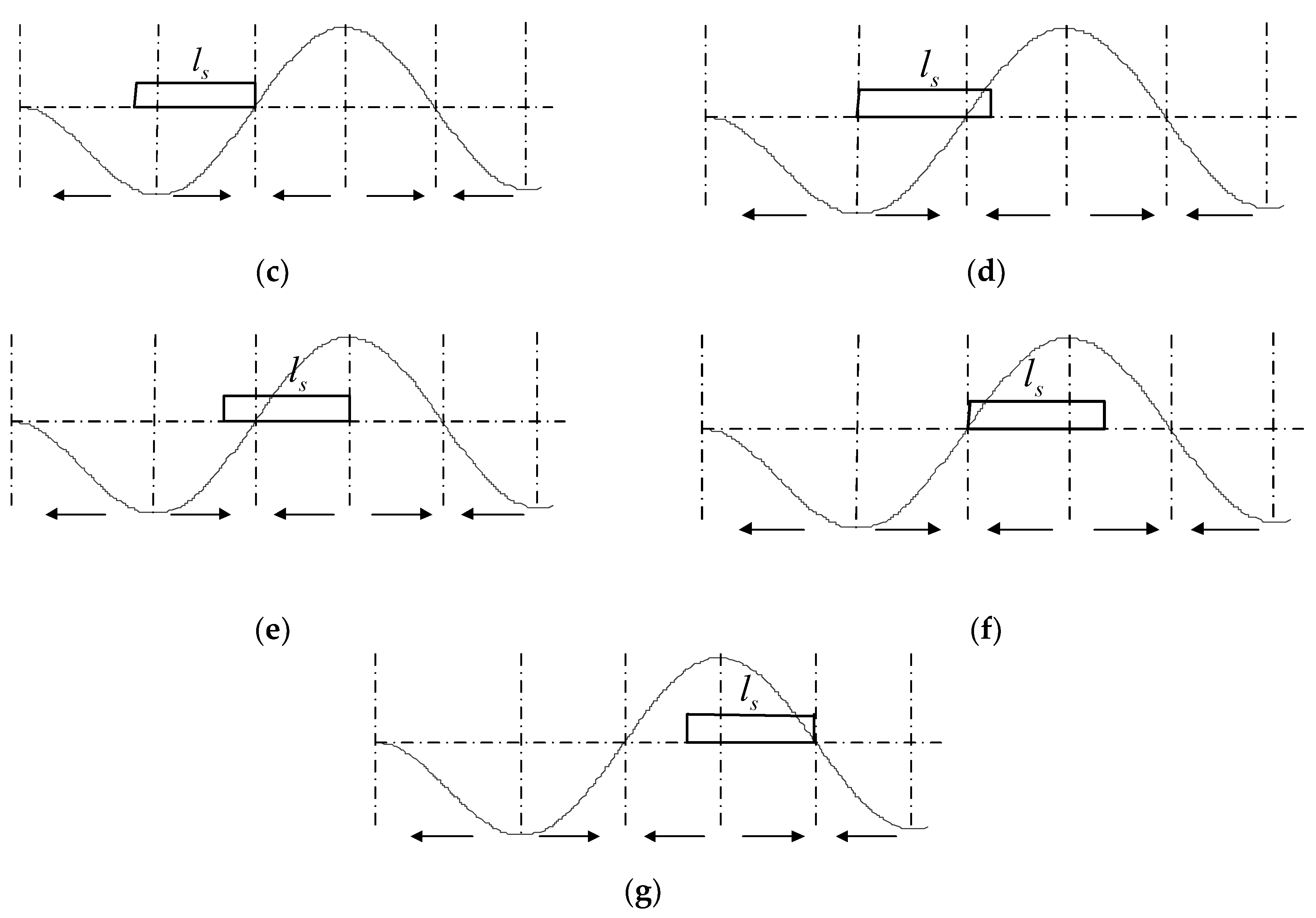
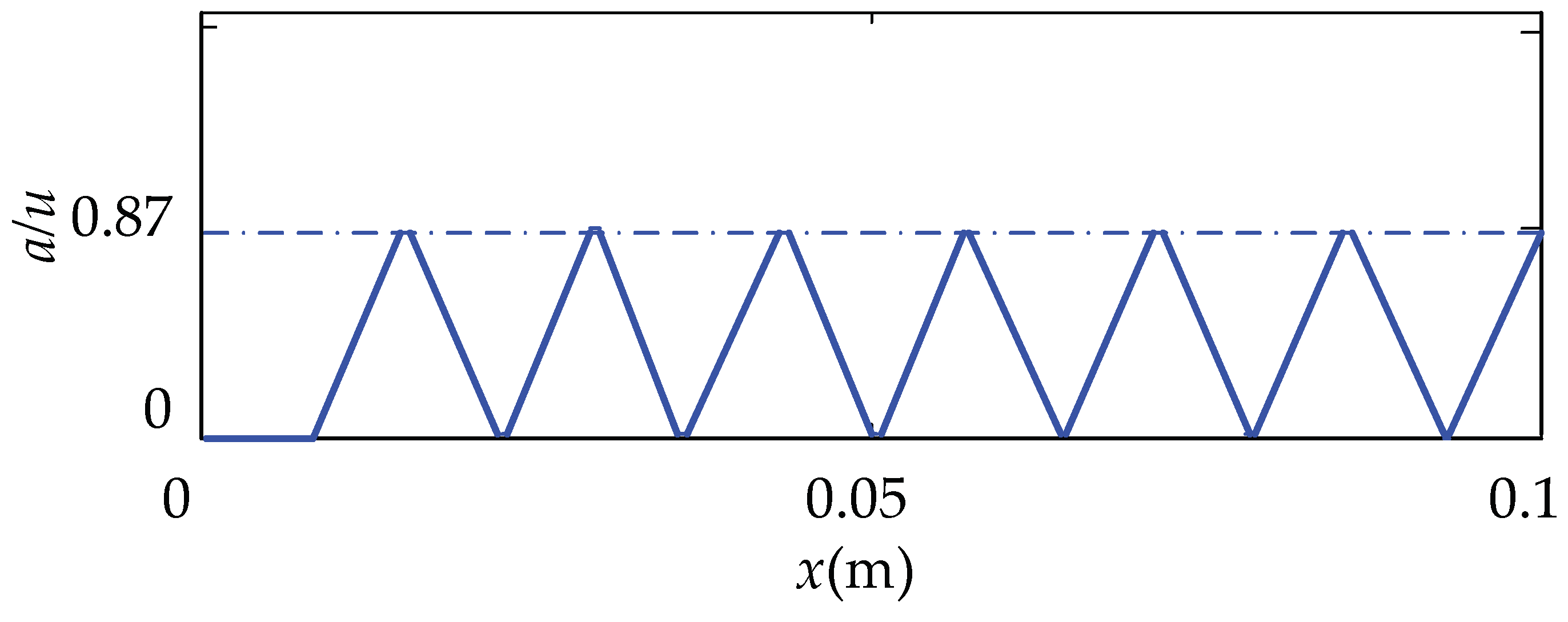
- As shown in Figure 10, when the finger is moved from the position I to the position II, the covered portion of the finger is all in the opposite directional vibrating region, and the ratio, a/u, of the same direction of the vibrating ciliary bodies is maintained at 0.
- When the finger moves from position II to position III, the same directional vibration area of the finger-covering part gradually increases. Also, the ratio of the same-directional ciliary bodies increases and the increased ratio is (x − 0.0131)/ls.
- When the finger moves from position III to position IV, the ratio of the same direction of ciliary bodies, a/u, becomes maximum and remains unchanged. The proportion of the same direction of ciliary bodies in this stage is:
- When the finger moves from position IV to position V, the opposite directional vibrational area of the finger-covering part gradually increases. Additionally, the ratio of the same directional ciliary bodies decreases from λ/(4ls), and the decreased ratio is (x − 0.0131 − λ/2)/ls.
- When the finger moves from position V to position VI, the increasing proportion of the same direction of ciliary bodies is equal to the decrease. So, the proportion remains unchanged, and the proportion of the same direction of ciliary bodies in this stage is:
- When the finger moves from position VI to position VII, the same directional vibration area of the finger-covering part gradually increases. The ratio of the same-directional ciliary bodies increases from 1 − λ/(4ls), and the increased ratio is (x − 0.0331 − λ/2)/ls.
4. Effect of System Parameters on Tactile Changes
4.1. Effect of System Parameters on Tactile Changes in Full-Coverage
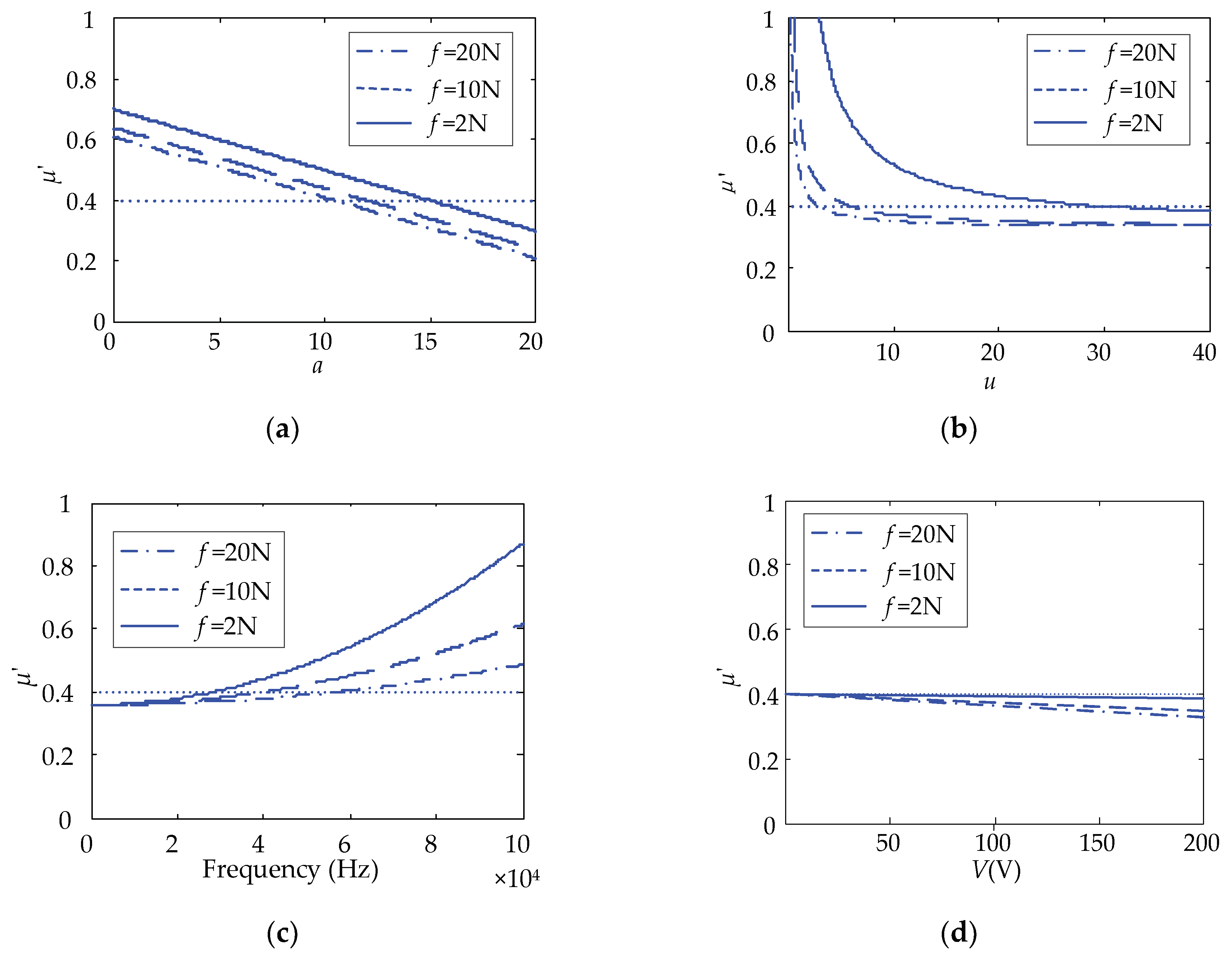
- As a increases, the equivalent friction coefficient, μ’, of the full-coverage touch beam gradually becomes smaller, and the two are linearly negatively correlated. As u increases, the equivalent friction coefficient, μ’, of the full-coverage touch beam also gradually becomes smaller.
- However, as ω increases, the equivalent friction coefficient, μ’, of the full-coverage gradually increases. Additionally, with the increase of V, the equivalent friction coefficient, μ’, of the full-coverage touch beam gradually decreases linearly. Comparing the μ’ curves under the three touch pressures, the higher the touch pressure, f, is, the smaller the value of μ’ becomes.
- Under the full-coverage touch, the change of the parameter, a, and frequency has the greatest influence on the equivalent friction coefficient. Although u has a great influence on the friction coefficient at the beginning, with the increase of u, the effect after 20 is not significantly changed. In order to achieve the best results, the same directional ciliary bodies, a, and voltage, V, should be increased as much as possible, and the parameter u can be kept within 20.
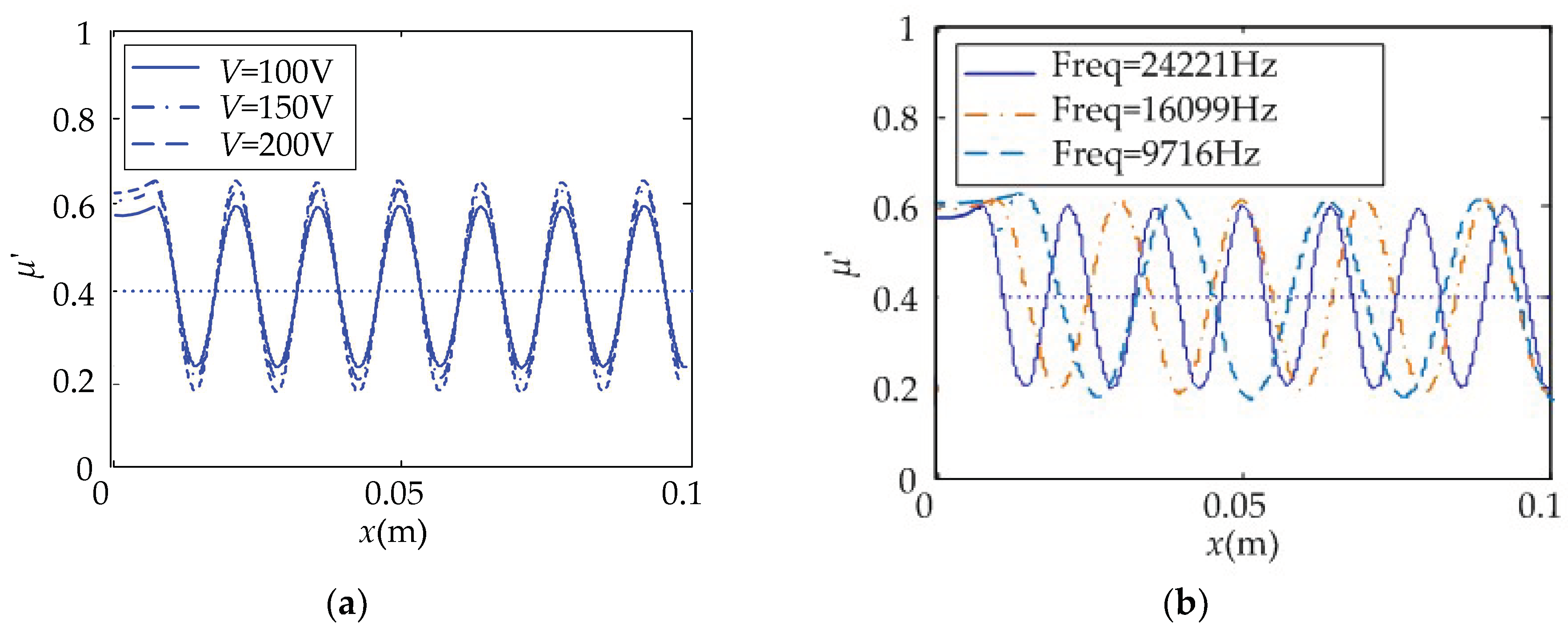
4.2. Effect of System Parameters on Tactile Changes in Local-Coverage
5. Experiments
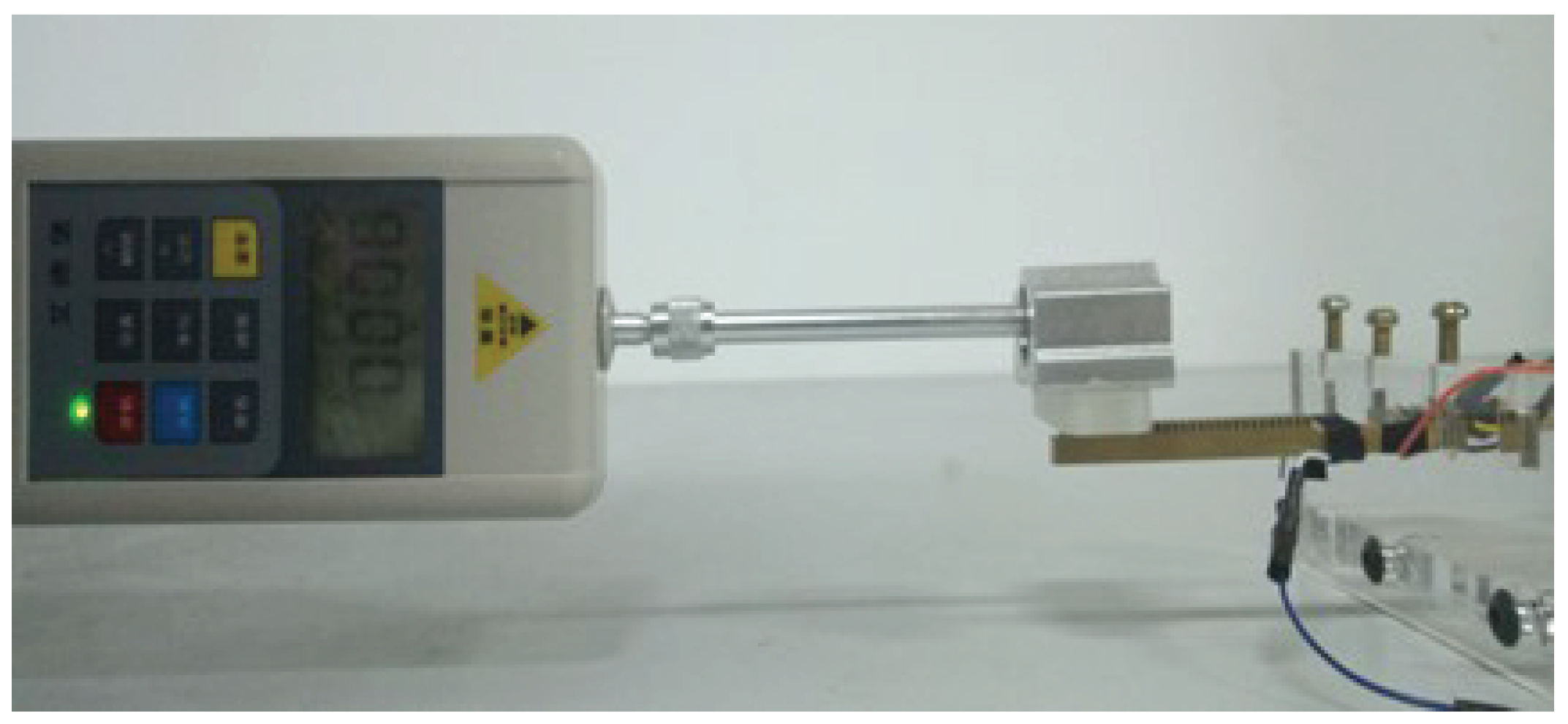
5.1. The Experiments on the Sliding Friction of the Cantilever Touch Beam
5.2. The Experiments of Human Factor
- In the case that no signal was supplied to the touch beam, one subject touched the cantilever touch beam with his left index finger and remembered the current tactile sensation.
- A drive signal with a voltage amplitude of 100 V was supplied to the touch beam. Then, the subject was required to touch the ciliary body touch beam again. By comparing this with the tactile feel of the touch beam when no signal was supplied, the subject was questioned to describe the tactile sensory changes about the roughness.
- The operating parameters of the touch beam and the movement direction of the finger were changed. The subject was required to touch the ciliary body touch beam again. The subject needed to describe the changes in the roughness of the touch beam, and we recorded whether the results were consistent with expectations. If the expectations were met, the subject needed to evaluate the degree of tactile perception and we recorded the score.
- Nine subjects were required to perform tests according to steps 1 to 3 and the relevant experimental scores were recorded.
- The subjects touched the beam from left to right slowly and the frequency of the operating signal was increased. The subjects were required to describe the changes in tactile sensations after touching. The degree to which the tactile sensations changed as the frequency was close to the resonance point was evaluated, and then scores were recorded.
- The ciliary bodies’ structure was changed. Three kinds of ciliary body space, no ciliary body, 1.5 mm, and 1 mm, were selected. The subjects were asked to touch a smooth position of the beam. The subjects were required to describe the changes in tactile sensations after touching. The degree which the tactile sensations changed as the ciliary bodies’ density increased was evaluated and then the scores were recorded.
- The voltage amplitude of the operating signal was regulated from 0 to 200 V while touching. The subjects were required to describe how they felt after they finished touching it. The degree to which the tactile sensations changed as the voltage increased was evaluated and then the scores were recorded.
- The subjects touched the beam from left to right slowly, and then the movement direction of the finger was reversed to touch the beam from right to left. The subjects were required to describe the tactile change. Whether the smooth and rough positions alternated in different directions of the finger motion was queried, and the perceived degree of subjects was scored and recorded.
- The subjects were asked to touch a smooth position of the beam and increase the touch pressure slightly. The subjects were required to describe their feeling after they finished touching the beam. Whether the subjects felt smooth with increasing pressure was queried, and the perceived degree of subjects was scored and recorded.
- The given comprehensive scores of the nine subjects ranged from 7 to 10 points. The highest average score was 9.6 points and the lowest average score was 7.2 points. The average value of the comprehensive was 8.31 points. It showed that that the tactile feedback device performs well and the sensation reproduction effect of the tactile feedback device with piezoelectric ciliary body beams is notable.
- Among the five test items, the tactile control effect of changing the voltage amplitude was the best. The tactile perception effect of changing the touch pressure was the weakest. The reason is that the change of touch pressure had little effect on the equivalent friction coefficient in the range of test pressures, while the equivalent friction coefficient was more sensitive to the voltage change in local-coverage.
- By analyzing the lower scores, the third subject’s scores were lower. He gave only 4 points for the effect of changing the touch pressure. In other test items, he gave 7 or 8 points, which is approximately the scores given by others. It indicates that there is a difference in the sensitivity of human skin receptors when the perception of tactile changes faintly.
6. Conclusions
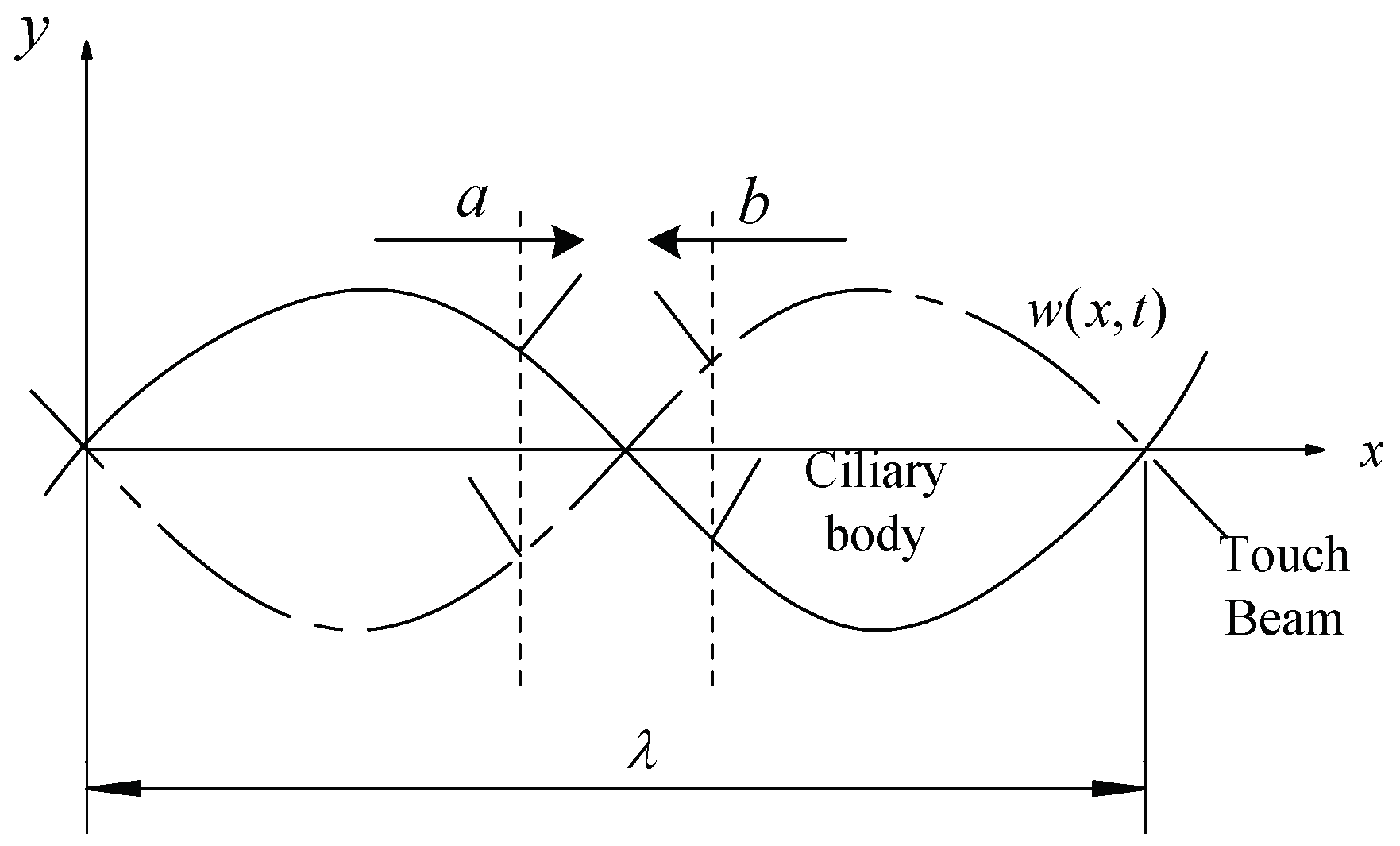
- The full-coverage was mainly affected by the proportion of the same direction of ciliary bodies and the operating frequency. The greater the proportion of the same direction of vibrating ciliary bodies is, the smaller the full-coverage equivalent friction coefficient is. The greater the operating frequency is, the greater the full-coverage equivalent friction coefficient is.
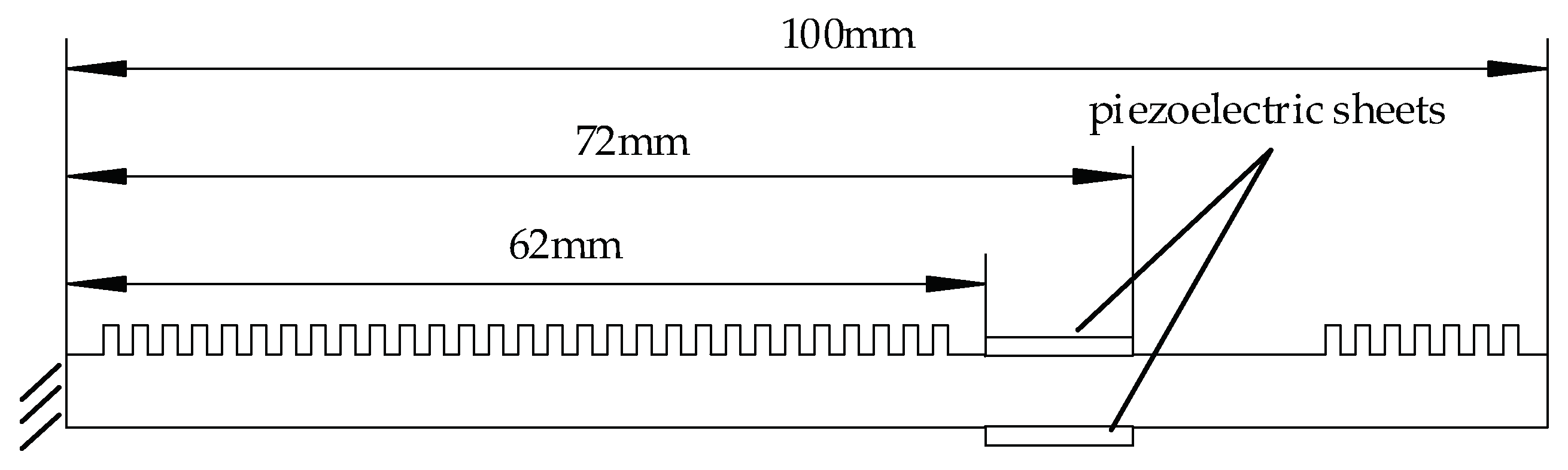
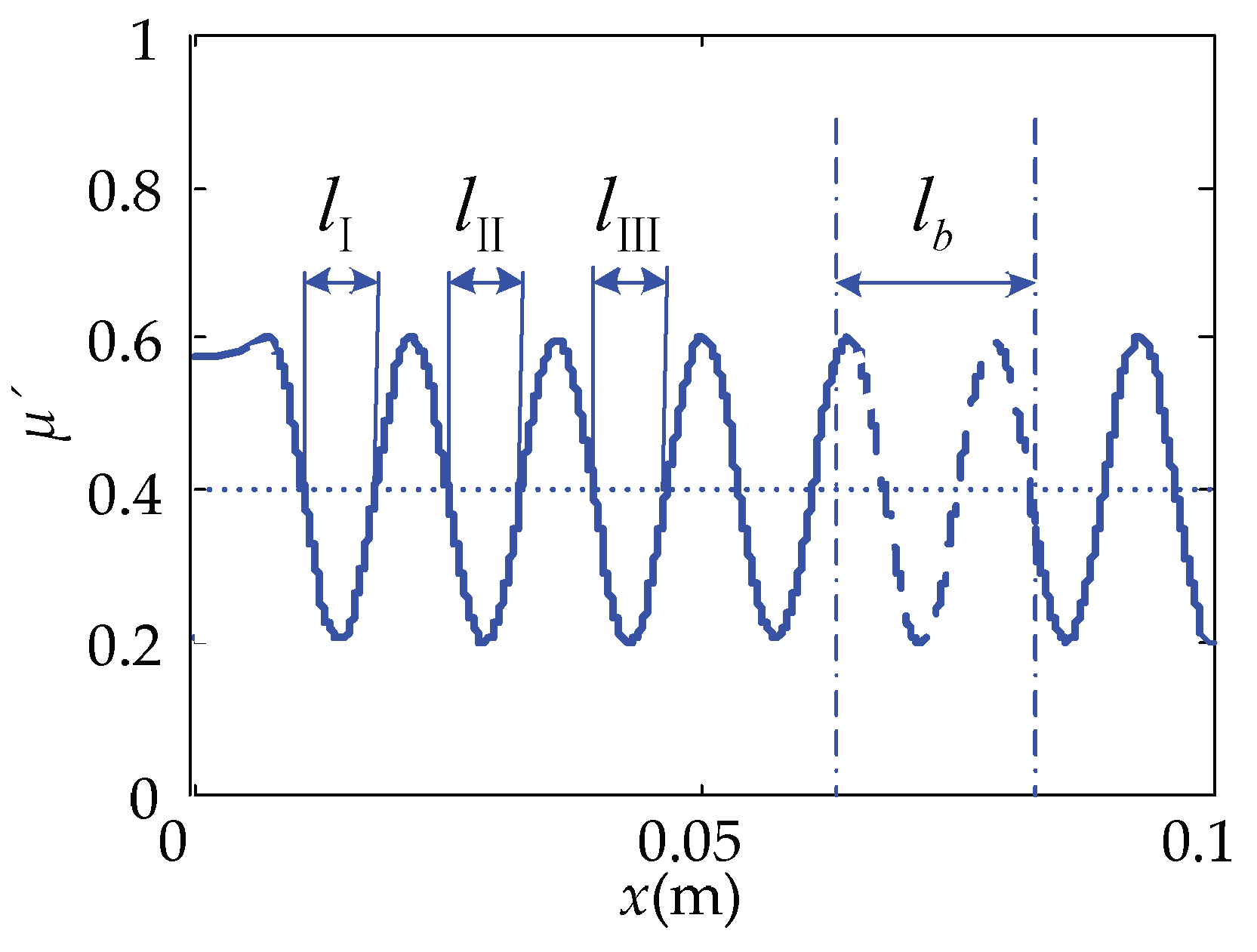
- The local-coverage was mainly affected by the touch position and the amplitude of the operating voltage. The local equivalent friction coefficient at the contact position alternated periodically, and the left side of the piezoelectric sheets, which was 0.0137, 0.0275, and 0.0422 m, respectively, on the abscissa, x, is the relatively smooth position that was easily perceived. The larger the amplitude of the excitation voltage is, the more obvious the tactile change on the touch beam is.
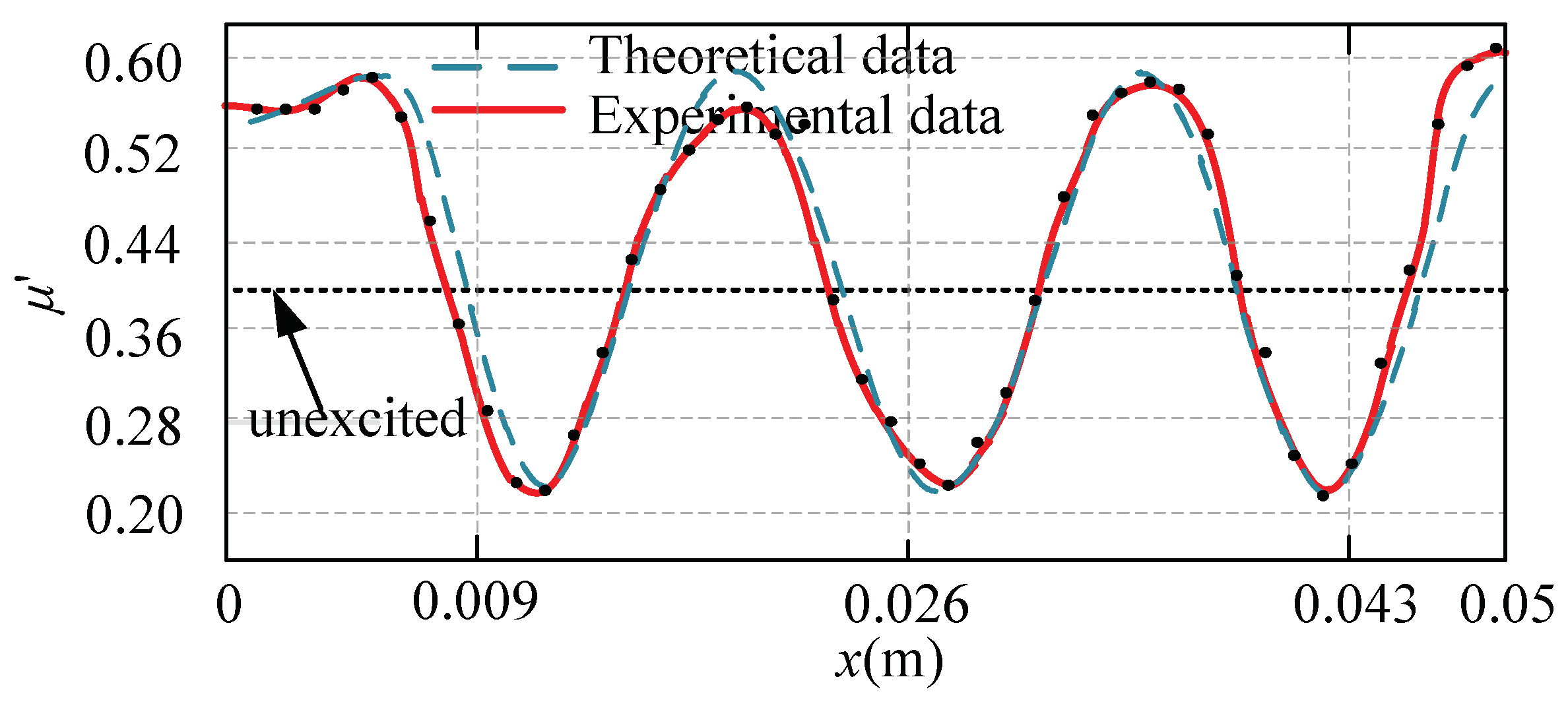
- The experimental results of the sliding friction of the touch beam were basically consistent with the corresponding theoretical calculations. In the human factor experiments, the tactile effect of changing the voltage amplitude and increasing the ciliary body density in the prototype was notable. All the results were consistent with the expectations.
Author Contributions
Funding
Conflicts of Interest
References
- Thawani, J.P.; Ramayya, A.G.; Abdullah, K.G.; Hudgins, E.; Vaughan, K.; Piazza, M. Resident simulation training in endoscopic endonasal surgery utilizing haptic feedback technology. J. Clin. Neurosci. 2016, 34, 112–116. [Google Scholar] [CrossRef] [PubMed]
- Lee, M.H.; Nicholls, H.R. Review Article Tactile sensing for mechatronics—A state of the art survey. Mechatronics 1999, 9, 1–31. [Google Scholar] [CrossRef]
- Yoshida, T.; Shimizu, K.; Kurogi, T.; Kamuro, S.; Minamizawa, K.; Nii, H. RePro3D: Full-parallax 3D display with haptic feedback using retro-reflective projection technology. In Proceedings of the IEEE International Symposium on VR Innovation, Melaka, Malaysia, 30 November–2 December 2010. [Google Scholar]
- Mélisande, B.; Frédéric, G.; Betty, L. Squeeze film effect for the design of an ultrasonic tactile plate. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 2678–2688. [Google Scholar]
- Giraud, F.; Amberg, M.; Lemairesemail, B.; Casiez, G. Design of a transparent tactile stimulator. In Proceedings of the 2012 IEEE Haptics Symposium, Vancouver, BC, Canada, 16 April 2012. [Google Scholar]
- Özgür, M.; Verena, M.W.; Vincent, H. Contaminant Resistant Pin-Based Tactile Display. In Proceedings of the 2017 World Haptics Conference, Munich, Germany, 6–9 June 2017; pp. 165–170. [Google Scholar]
- Yan-Yan, Z.; Chao-Dong, L.I.; Bo-Qian, K. Tactile displays, actuators and their vibroexcitation mode. Ind. Instrum. Autom. 2008, 2, 82–85. [Google Scholar]
- Wong, R.D.P.; Posner, J.D.; Santos, V.J. Flexible microfluidic normal force sensor skin for tactile feedback. Sens. Actuators A Phys. 2012, 179, 62–69. [Google Scholar] [CrossRef]
- Jara, C.A.; Pomares, J.; Candelas, F.A.; Torres, F. Control Framework for Dexterous Manipulation Using Dynamic Visual Servoing and Tactile Sensors’ Feedback. Sensors 2014, 14, 1787–1804. [Google Scholar] [CrossRef] [PubMed]
- Fu, Z. Virtual Reality Application Research of Force Tactile Feedback System. Ph.D. Thesis, Shanghai University of Engineering Science, Shanghai, China, 2015. [Google Scholar]
- Ghenna, S.; Vezzoli, E.; Giraud-Audine, C.; Giraud, F.; Amberg, M.; Lemaire-Semail, B. Enhancing variable friction tactile display using an ultrasonic travelling wave. IEEE Trans. Haptics 2017, 10, 296–301. [Google Scholar] [CrossRef] [PubMed]
- Ma, L.; Lu, X. Research on tactile rendering system based on friction control. Comput. Technol. Dev. 2015, 1, 62–65. [Google Scholar]
- Vezzoli, E.; Messaoud, W.B.; Amberg, M.; Giraud, F.; Lemaire-Semail, B.; Bueno, M.A. Physical and perceptual independence of ultrasonic vibration and electrovibration for friction modulation. IEEE Trans. Haptics 2017, 8, 235–239. [Google Scholar] [CrossRef] [PubMed]
- Wiertlewski, M.; Fenton Friesen, R.; Colgate, J.E. Partial squeeze film levitation modulates fingertip friction. Proc. Natl. Acad. Sci. USA 2016, 113, 9210–9215. [Google Scholar] [CrossRef] [PubMed]
- Ikei, Y.; Shiratori, M. TextureExplorer: A Tactile and Force Display for Virtual Textures. In Proceedings of the 10th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Orlando, FL, USA, 24–25 March 2002; pp. 327–334. [Google Scholar]
- Vincent, H.; Juan, M.C. Tactile Display Device Using Distributed Lateral Skin Stretch. In Proceedings of the Symposium on Tactile Interfaces for Virtual Environment and Teleoperator Systems, Osaka, Japan, 25–27 September 2000; pp. 1309–1314. [Google Scholar]
- Li, C.; Xing, J.; Xu, L. Coupled vibration of driving sections for an electromechanical integrated harmonic piezodrive system. AIP Adv. 2014, 4, 031320. [Google Scholar] [CrossRef]
- Xing, J.; Liu, D.; Ren, W. Summary of the development of piezoelectric haptic feedback actuators. Piezoelectr. Acoustoopt. 2014, 40, 146–152. [Google Scholar]
- Bashash, S.; Vora, K.; Jalili, N.; Evans, P.G.; Dapino, M.J.; Slaughter, J. Modeling Major and Minor Hysteresis Loops in Galfenol-Driven Micro-Positioning Actuators Using A Memory-Based Hysteresis Framework s. In Proceedings of the 1st Annual Dynamic Systems and Control Conference, Ann Arbor, MI, USA, 20–22 October 2008; p. 1027. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L [m] | h [mm] | W [mm] | E [GPa] | ρ [kg/m3] |
|---|---|---|---|---|
| 0.1 | 5 | 5 | 105 | 8500 |
| lp [mm] | hp [mm] | Wp [mm] | E [GPa] | ρp [kg/m3] | e31 [c/m2] |
|---|---|---|---|---|---|
| 10 | 0.3 | 5 | 76.5 | 7500 | 2.0 |
| u | ω [Hz] | f [N] | V [V] | m [kg] |
|---|---|---|---|---|
| 20 | 24,221 | 20 | 100 | 0.01 |
| Subjects | Frequency | Ciliary Body Structure | Voltage Amplitude | Movement Direction | Touch Pressure | Comprehensive Score |
|---|---|---|---|---|---|---|
| 1 | 10 | 8 | 10 | 10 | 5 | 8.6 |
| 2 | 10 | 10 | 10 | 8 | 7 | 9 |
| 3 | 8 | 8 | 8 | 7 | 4 | 7 |
| 4 | 10 | 10 | 10 | 10 | 8 | 9.6 |
| 5 | 8 | 8 | 10 | 8 | 5 | 7.8 |
| 6 | 8 | 10 | 10 | 10 | 7 | 9 |
| 7 | 7 | 10 | 9 | 8 | 7 | 8.2 |
| 8 | 7 | 8 | 10 | 7 | 8 | 8 |
| 9 | 8 | 8 | 10 | 7 | 5 | 7.6 |
| average | 8.44 | 8.89 | 9.67 | 8.33 | 6.22 | 8.31 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, J.; Li, H.; Liu, D. Anisotropic Vibration Tactile Model and Human Factor Analysis for a Piezoelectric Tactile Feedback Device. Micromachines 2019, 10, 448. https://doi.org/10.3390/mi10070448
Xing J, Li H, Liu D. Anisotropic Vibration Tactile Model and Human Factor Analysis for a Piezoelectric Tactile Feedback Device. Micromachines. 2019; 10(7):448. https://doi.org/10.3390/mi10070448
Chicago/Turabian StyleXing, Jichun, Huajun Li, and Dechun Liu. 2019. "Anisotropic Vibration Tactile Model and Human Factor Analysis for a Piezoelectric Tactile Feedback Device" Micromachines 10, no. 7: 448. https://doi.org/10.3390/mi10070448
APA StyleXing, J., Li, H., & Liu, D. (2019). Anisotropic Vibration Tactile Model and Human Factor Analysis for a Piezoelectric Tactile Feedback Device. Micromachines, 10(7), 448. https://doi.org/10.3390/mi10070448