1. Introduction
The micro electro-mechanical system inertial measurement unit (MEMS IMU) has the advantages of being low cost, small volume and light weight, but the low precision and poor stability are still problems that cannot be ignored. Many aircrafts, cars, and satellites are beginning to use MEMS sensors. Among them, a large portion of MEMS accelerators have already met tactical and navigation grade requirements. However, only a few MEMS gyros can reach the level of the tactical grade [
1], and these tactical grade gyros are too expensive for common application. To improve the performance of MEMS IMU, a series of studies have been conducted to promote the MEMS manufacturing technology. On the other hand, the improvement can also be achieved through reasonable designs and algorithms. Under the restriction of the current manufacturing technology, the redundant design is the most effective approach to improve the accuracy and stability. The redundant measurement signals can be fused to produce a more accurate signal. Besides, the reliability of the system can also be greatly improved. Even for the tactical or navigation grade sensors, the redundant configuration can improve the performance substantially [
2].
The most necessary part of the redundant inertial navigation system (RINS) is the management of the redundant data, which includes two aspects: Data fusion estimation and anomaly data processing. The anomaly data is comprised of two categories to be processed: The outliers are processed by the outlier eliminating algorithms or the outlier rejecting filtering [
3,
4]; and the faults are detected and isolated by the fault detection and isolation (FDI) technology [
5,
6,
7]. The methods of data fusion include the virtual gyroscope technology [
8], distributed Kalman filtering [
9,
10], federated Kalman filtering [
11], least squares (LS) method [
12,
13] and various improved algorithms based on them. In a complete system, after obtaining the measurement data at each sampling moment, the measurement data is examined for the presence of outliers, and then the faults are detected through FDI methods. If there is any fault, the faulty device will be isolated and the redundant system will be reconstructed. Finally, the measurement data from normal devices is fused and estimated by the data fusion algorithms.
However, in practice experiments, several problems are found in the current strategy. First, the outliers in the measurement data, especially the outlier patches, are easily misdiagnosed as the faults, which will lead to an increase in the false alarm rate. The outliers will cause the detection function values to exceed over the detection threshold, but there is no failure or damage in the sensors with outliers. Such misdiagnosis may induce a well-behaved sensor to be deactivated. Second, when the outlier eliminating methods and FDI methods are operating simultaneously, the practical performance may degrade, because the calculation burden will increase and the results of different methods will interfere with each other. For example, the outlier eliminating methods regard every anomaly point as an outlier. Since the deviation of anomaly points caused by sensor faults will be diminished after the outlier eliminating processing, the original statistical characteristics of the faults will change. As a result, the probability of correct detection (PCD) and the probability of correct isolation (PCI) will decline. Third, it is difficult to detect incipient faults, which have not exceeded the detection threshold, but such faults will also cause impact on the accuracy of the system. Finally, most of the current data fusion algorithms are based on the assumption of the unbiased estimation. But the outliers and faults will undermine the unbiasedness, and it will cause the accuracy of the fusion estimation decrease.
In order to solve the problems above, this paper designs a fault-tolerant fusion algorithm for the redundant MEMS gyro systems. The proposed method provides a real-time monitoring of the redundant inertial information with the covariance matrix and fault detection and isolation function. The measurement data quality index is designed as the evidence of the weighted fusion estimation algorithm. Based on the structure of the distributed Kalman filtering, a fault and outlier tolerant fusion method is presented. In this method, the outliers and faults are processed simultaneously to avoid the first two problems mentioned above. The measurement data quality index is sensitive to each variation of the local measurement signal, and the missed detection for the incipient faults and minor faults is improved. The index not only considers the random noise but also reflects the unbiasedness of measurement signals, so the last problem mentioned above is solved. The experiments demonstrate that the proposed method can improve the accuracy and stability of MEMS IMU. The redundant data management process is simplified, and the computing burden of the system is reduced.
This paper is organized as follows. The weighted distributed Kalman filtering is briefly reviewed in
Section 2. In
Section 3, the singular value decomposition (SVD) based FDI method is reviewed, and the improved methods are presented. In
Section 4, the disadvantages of the traditional strategy are analyzed. In
Section 5, the improved index of the measurement data quality is proposed based on the fault detection and isolation function, and the developed fault-tolerant fusion method are proposed in this section. The simulation experiments are conducted to test the performance of the new method, and the results are compared with other methods in
Section 6. Finally, the conclusions are given in
Section 7.
2. Multi-Sensor Optimal Information Fusion Kalman Filtering Weighted by Scalar
In this section, a distributed Kalman filtering [
9,
10] is reviewed briefly. This algorithm is a weighted estimation under the requirement of the linear minimum variance. Compared with the centralized fusion estimation, it is globally suboptimal. But it is optimal in the linear unbiased minimum variance criterion under the structure of the weighting local estimation. Considering a multi-sensor system with
sensors,
is the real state to be estimated.
(
= 1, 2,…,
) is the measurement data of the
-th sensor.
is the variance matrix of noise in
-th sensor. The fusion method can be given by the equations as follows.
Among the equations above,
is the unbiased estimate of the
-th sensor, and
is the estimation error.
is the fusion estimation value of the system. The optimal weight coefficient vector is given by
. The matrix
and vector
can be defined as:
is the covariance matrix of the estimation error
and
, and the
indicates the trace of matrix. The estimation error covariance matrix of the optimal weighted fusion algorithm is calculated by:
The relation proved in [
10] is given as follows:
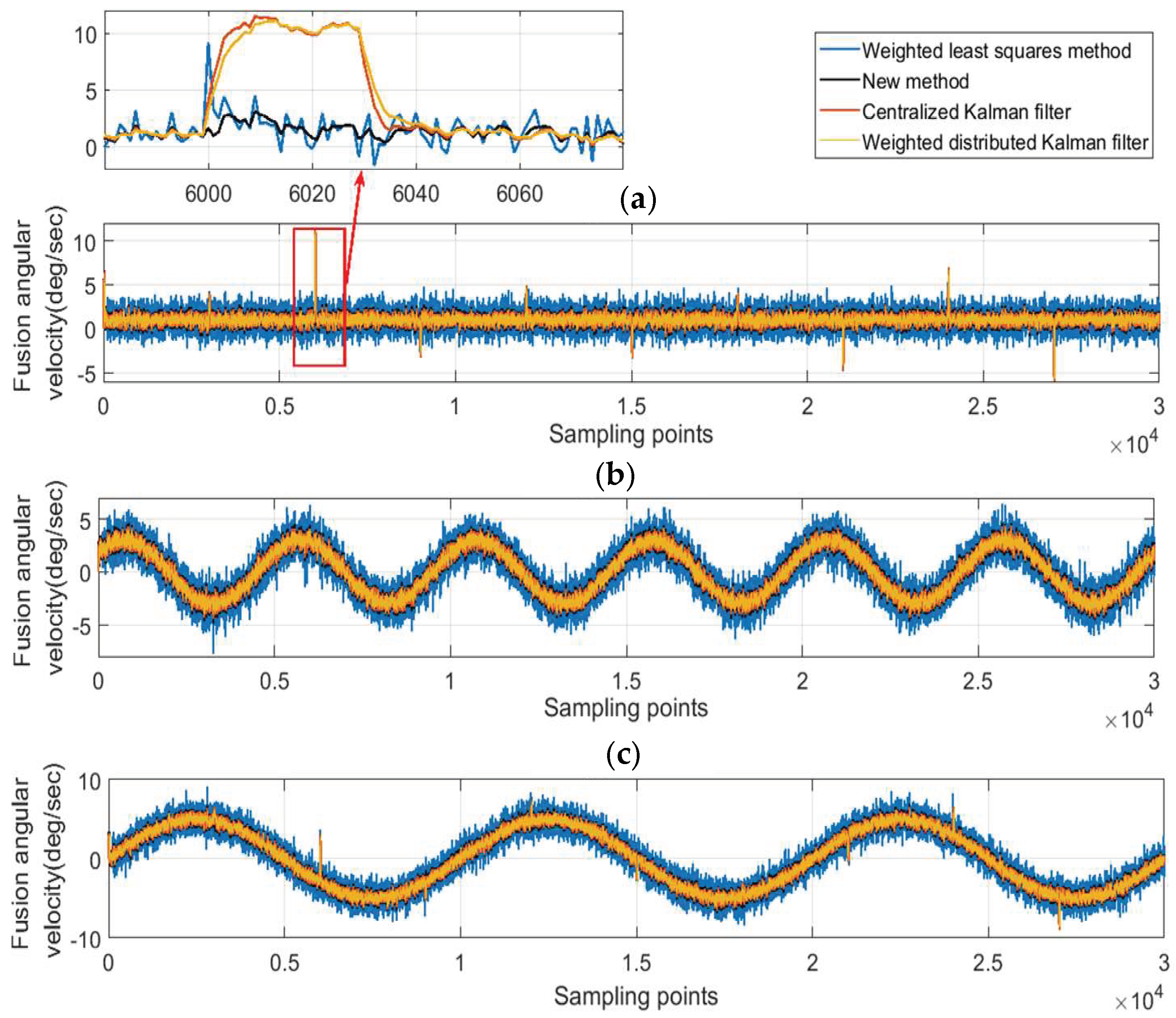
To sum up, the weight coefficient of each sensor in this method is dependent on the traces of covariance matrixes. A necessary premise is that each local estimator is unbiased. Therefore, if any anomaly occurs in the inertial sensors, the unbiasedness will be destroyed. As a result, the final estimation accuracy will decrease. To explain this point, a simulation experiment is presented in
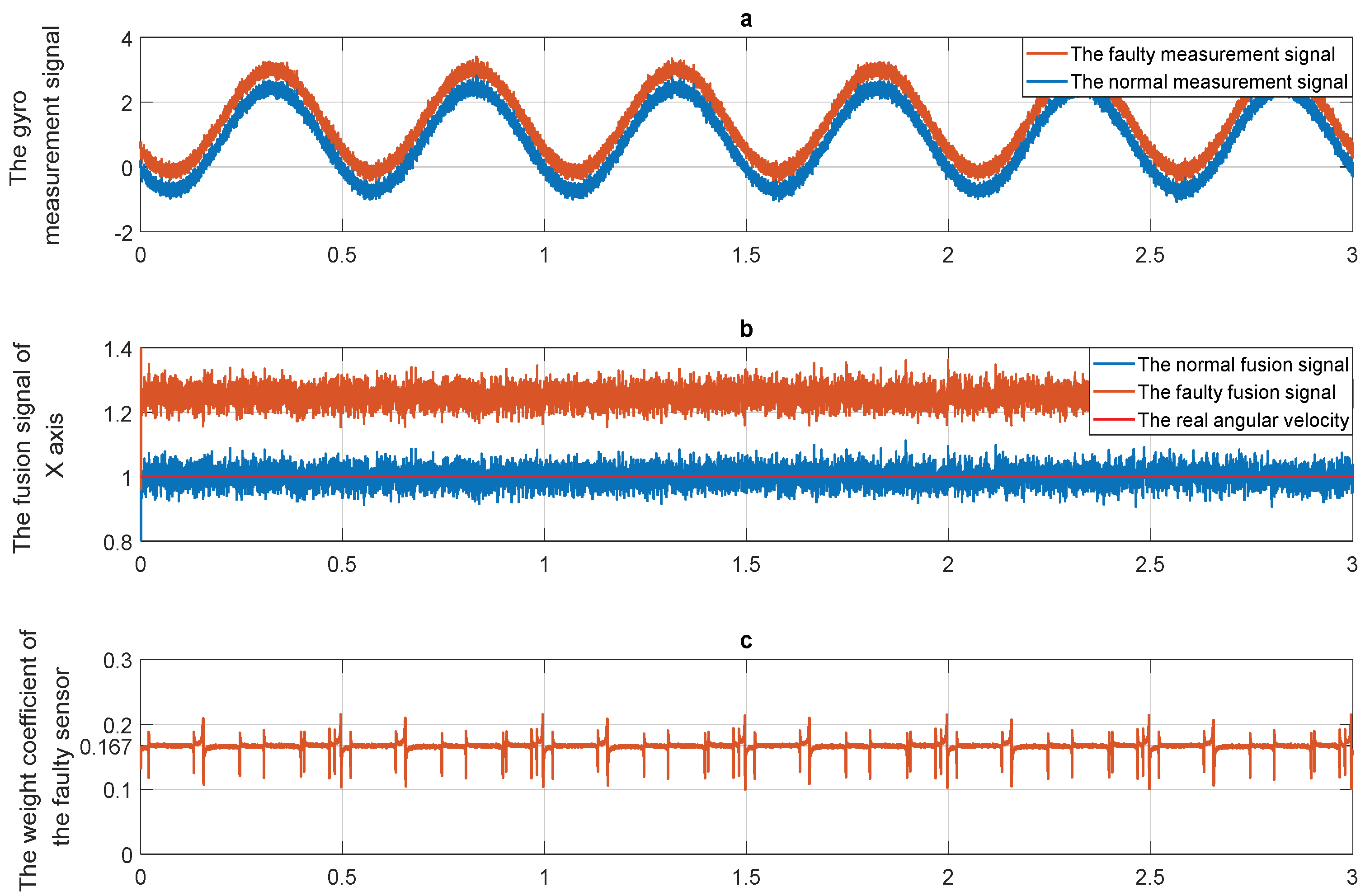
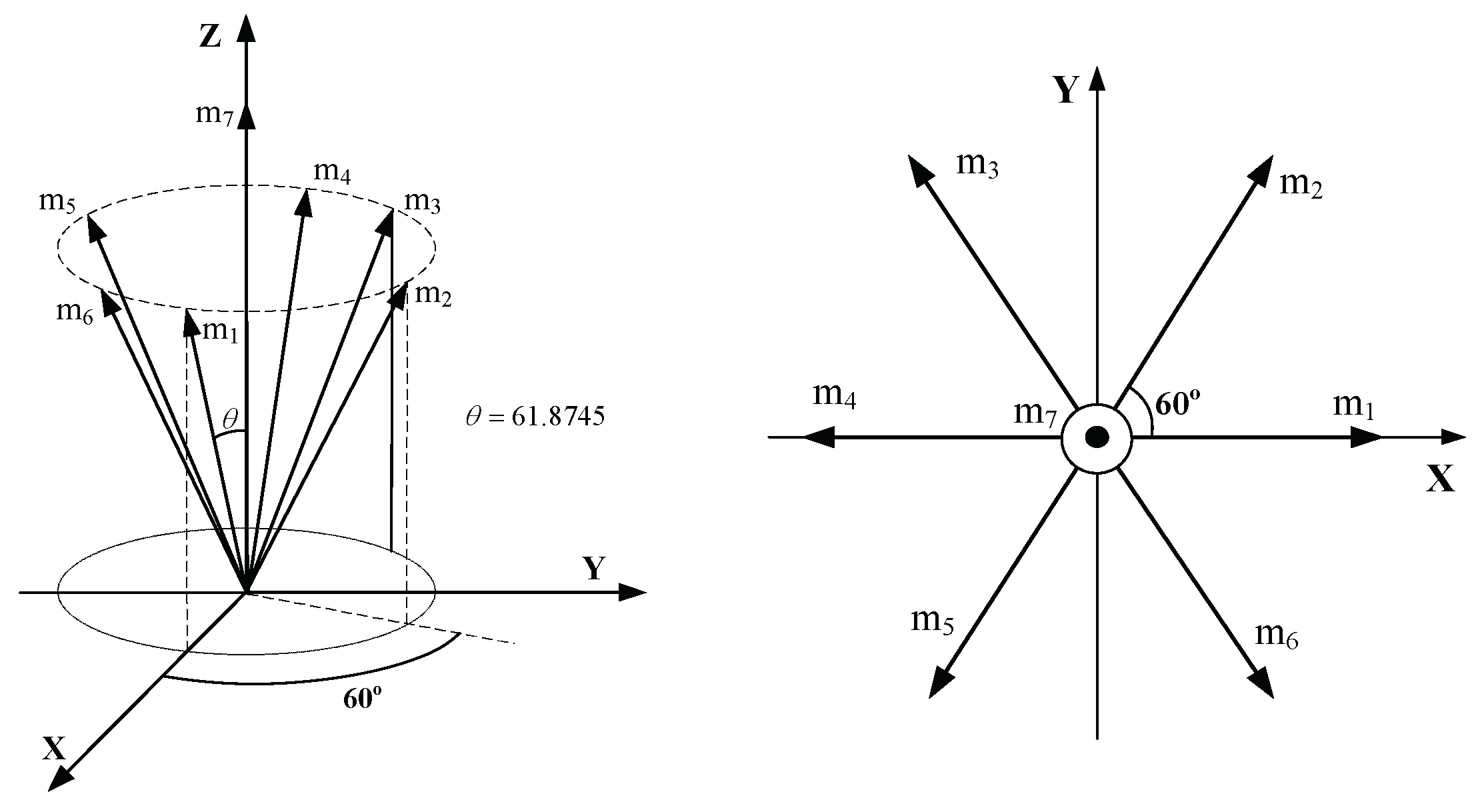
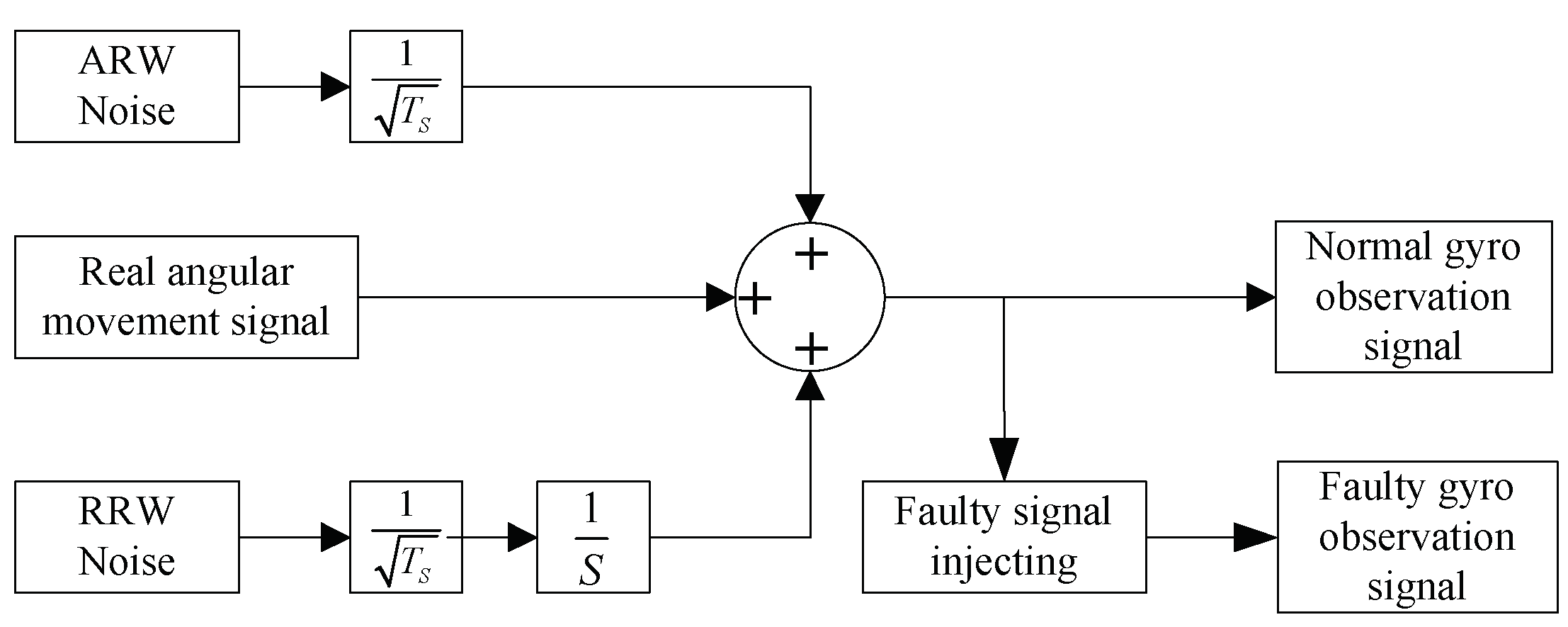
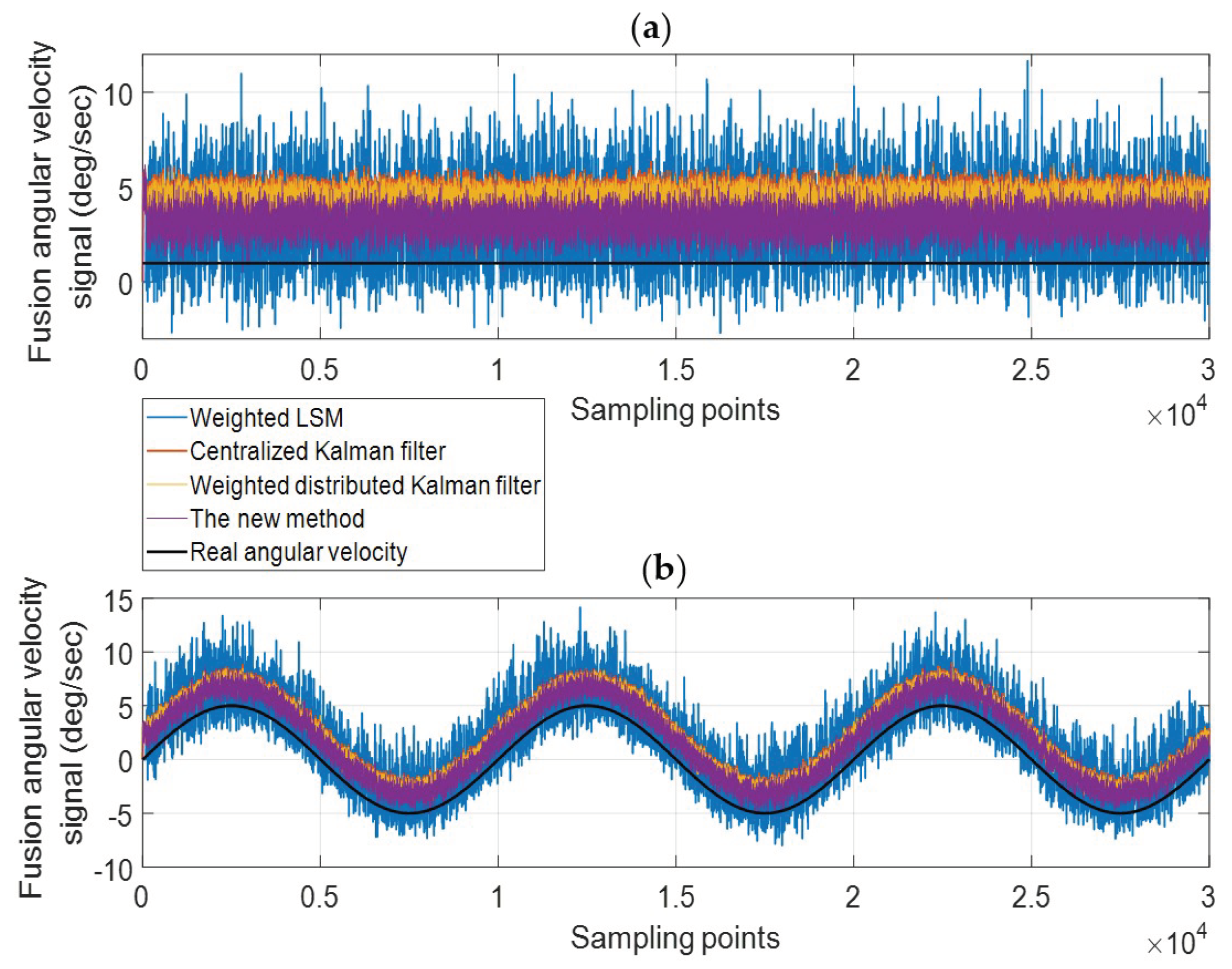
Figure 1. The 6-gyro-dodecahedron redundant system is adopted in the simulation, a
constant drift fault is injected into the measurement signal of the fourth gyro. This experiment is briefly described here, and the detailed description is presented in
Section 6.
Figure 1a shows the normal signal and the faulty signal. The redundant gyro signals are fused through the method introduced above, and the fusion signals in the normal situation and faulty situation are compared as
Figure 1b shows. The weight coefficients of the faulty gyro are shown in
Figure 1c.
Table 1 exhibits the detailed information.
From
Figure 1b and
Table 1, compared with the normal case, the noise variance of the faulty fusion signal increases by 0.218 times, but the bias (constant drift) of the faulty signal is about 500 million times larger than the normal case. In the simulation, the fourth gyro has a conspicuous fault as
Figure 1a shows. Ideally, the weight coefficients of the different gyro are equal in the normal situation (which is 1/6 in this experiment). When the gyro has faults, the corresponding coefficient is supposed to decrease. But from
Figure 1c, the weight coefficinet of the faulty gyro still remains at around 1/6 (the mutation is caused by the outliers). Therefore, the conclusion can be drawn that the traditional fusion method is only sensitive to the noise but not sensitive to the bias. This is the reason why the nosie variance of the faulty case only increases a little, but the bias increases significantly.
3. The Fault Detection and Isolation Method
3.1. The Singular Value Decomposition Based Method and its Improvement
The parity space method is a diagnosis method based on the analytic redundancy. Its basic idea is to construct a parity matrix, which is based on the hardware redundancy or analytical redundancy equations of the system. Then, the parity (consistency) of the system mathematical model (analytic redundancy relationship) is checked with the actual observation. The methods need to find the parity equation decoupled from the faults, and the parity vector and the fault detection function are constructed based on the parity equation. With the detection threshold determined by the hypothesis testing theory, the faults can be detected once the detection function values exceed the threshold. In this paper, the SVD based method [
5] is reviewed, and the relations between detection functions and data anomalies are deduced. This relation is the basis to analyze anomalies.
In normal working, the observation equation of a redundant system composed of
gyroscopes can be expressed as follows:
In the equation,
is the measurement data vector of
n-dimensional;
is the geometric configuration matrix with
rows and three columns;
is a three-dimensional vector of angular rate state;
is the
-dimensional white Gaussian noise vector, which statistical characteristics meet:
When the anomalies appear, the observation equation can be expressed as:
In Equation (8),
is the anomaly vector. To detect anomalies, in [
5], an SVD-based method was presented, and a detailed derivation and verification were conducted. The first step is to decompose the geometric configuration matrix
through the singular value decomposition.
In Equation (9), the matrix
is a diagonal matrix. The decoupling matrix
is constructed form the matrix
as follows.
where
and
.
The parity vector
is calculated with the matrix
and the measurement vector
as follows.
In [
5], the fault detection function and isolation function are given as follows:
where the
is the fault reference vector, which refers to the
-th column of the matrix
, and the
corresponds the
-th sensor. The decision rule to detect fault is given as follows.
In [
5], it is suggested that the
obeys the
distribution, so the threshold
can be determined with a given false alarm probability
. If
, then the system can be considered fault-free; if
, then proceed to the isolation step. The fault isolation function of each sensor is calculated out. Next, the largest isolation function
is found, and the
-th sensor is isolated.
3.2. The Improvement of the SVD Based Method
The method above has the following disadvantages, which is analysed and proved in reference [
14]:
(1) The detection function FD has the probability to disobey the distribution, because the distribution requires that each variable is independent. The matrix is singular, so elements of the vector are not independent. As a result, the threshold determined by distribution is inappropriate.
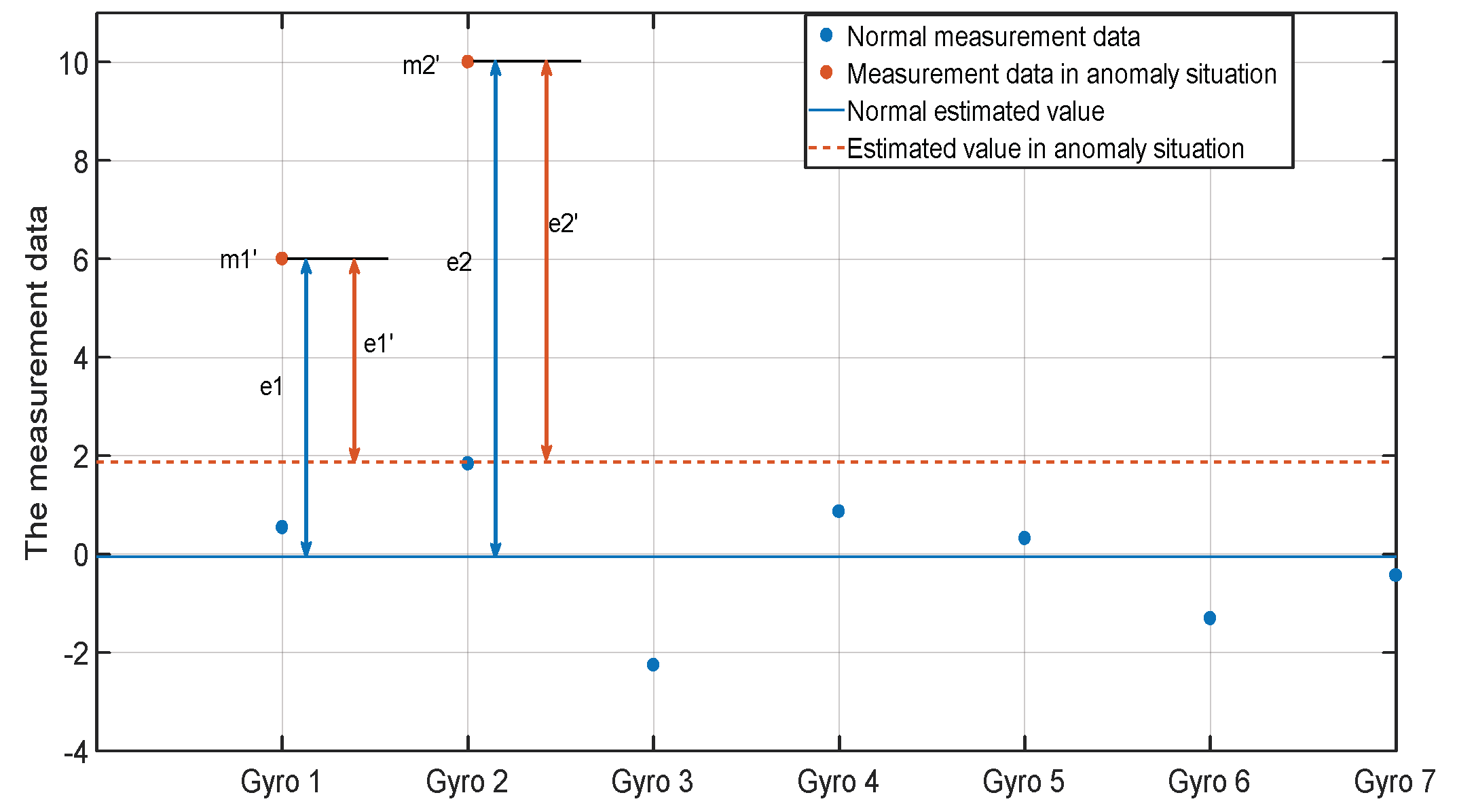
(2) The isolation function given in Equation (14) may cause the inequality of isolation probability among the sensors. The isolation function is designed to indicate the similarity between the parity vector and the fault reference vector, and the sensor with the highest similarity is most likely to have faults. From Equation (14), the values of the isolation function are subjected to the modules of , but there is no guarantee that the modules of each fault reference vector are equal. The similarity between the two vectors is supposed to only depend on the projection or the angular between them. In other words, the modules of the fault reference vectors are not supposed to influence the isolation function. A more appropriate method is to use the angular between the parity vector and the fault reference vector Vi. For example, consider a simple situation: , and . The isolation function values are calculated with Equation (14), and there are and . So the conclusion from the original method regards the second senor as faulty. However, the angular between and is 30°, and the angular between and is 60°. It is obvious that the first sensor is most likely to have faults, and the original method makes a wrong decision.
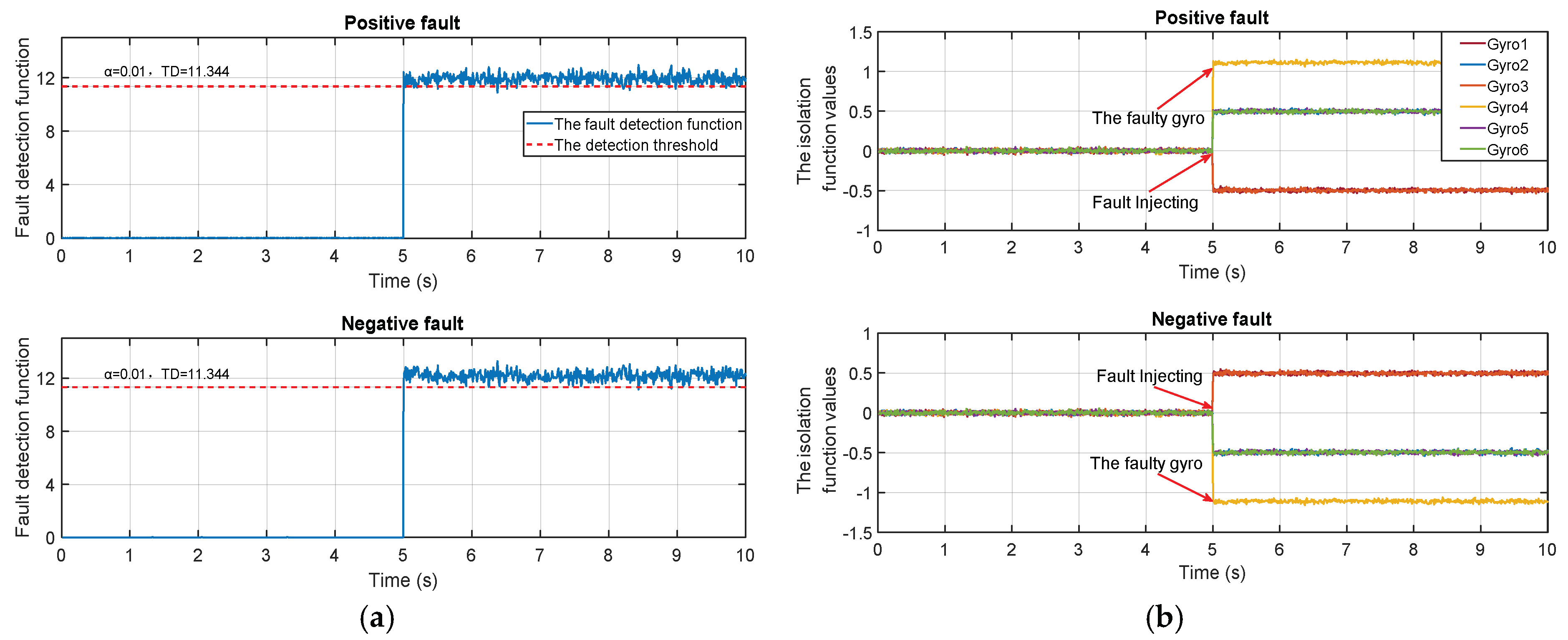
(3) The negative faults can cause the method to produce an incorrect result. For example, a group of gyro measurement signals are simulated based on the 6-gyros-dodecahedron system. A positive step fault and a negative step fault are injected in the fourth gyro in turn. The signal, detection function and isolation function are shown in
Figure 2. Analyzing the figure, the detection function is able to detect the faults once the faults are injected. However, the isolation strategy isolates the sensors, which corresponds to the largest isolation function value. However, the negative fault will bring down the isolation function values of the faulty sensor. Therefore, the isolation function fails to isolate negative faults.
To solve the problems above, the method is improved as follows. For the first problem, the decoupling matrix
is redefined and the parity vector is standardized as follows.
Since this improvement, the obeys χ2(n − 3) distribution, and the threshold can be determined with a given false alarm rate .
To solve the last two problems, the isolation function is redefined as:
The improved isolation function indicates the angular between the parity vector and the -th fault reference vector , and the effect of the module of is eliminated. So the imparity caused by fault reference vectors will not influence the isolation results. The negative-fault problem can also be solved through the squaring operation in Equation (18).
4. The Disadvantages of Current Fault-Tolerant Fusion Strategy
In the section above, the data fusion method and the SVD based FDI method are introduced. In this section, the disadvantages of the current fault-tolerant fusion strategy are analysed, and the simulation experiments are conducted to prove our viewpoints.
The traditional strategy of the fault-tolerant fusion strategies need to eliminate the outliers first; then the outlier-eliminated signals are diagnosed through the FDI method, and the faulty sensors are isolated; finally, the fusion estimation results are calculated with the measurement signals from anomaly-free sensors.
The first flaw is the problem of the false alarm and the missed detection. For the false alarm, the outlier is a common phenomenon in the measurement system. The definition of an outlier is an observation (or subset of observations) that appears to be inconsistent with the remainder of that set of data. The outliers arise in the inertial measurement data because of the instrument error, natural deviations, or changes in behaviour of systems, which usually appear as the self-recovery and transient mutations [
3]. This kind of anomalies can make the fault detection function exceed the threshold like the faults. The traditional strategy regards the system as faulty once the detection function exceeds the threshold, so the sensors with outliers are easily misdiagnosed as faulty devices. However, such sensors have no damage or failure.
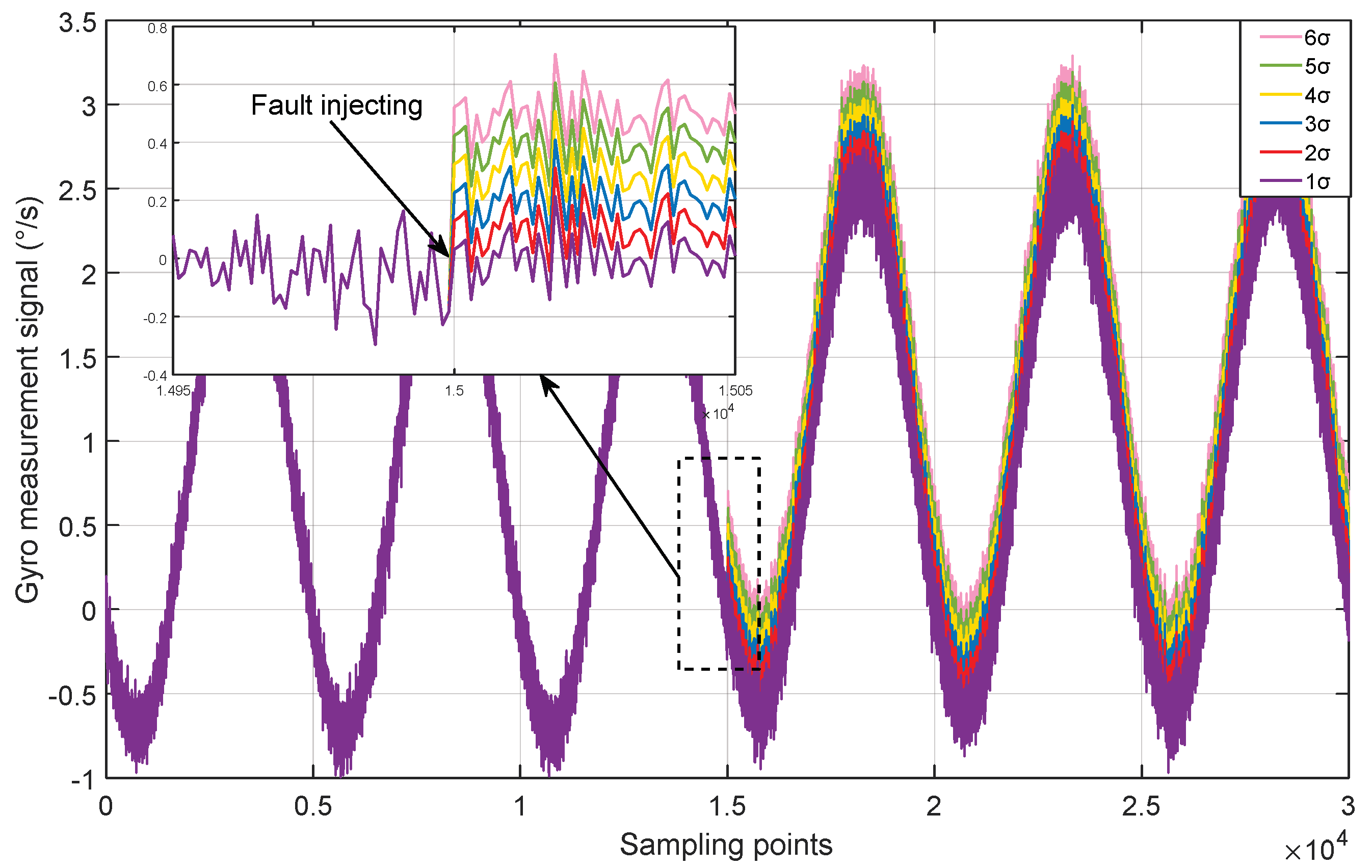
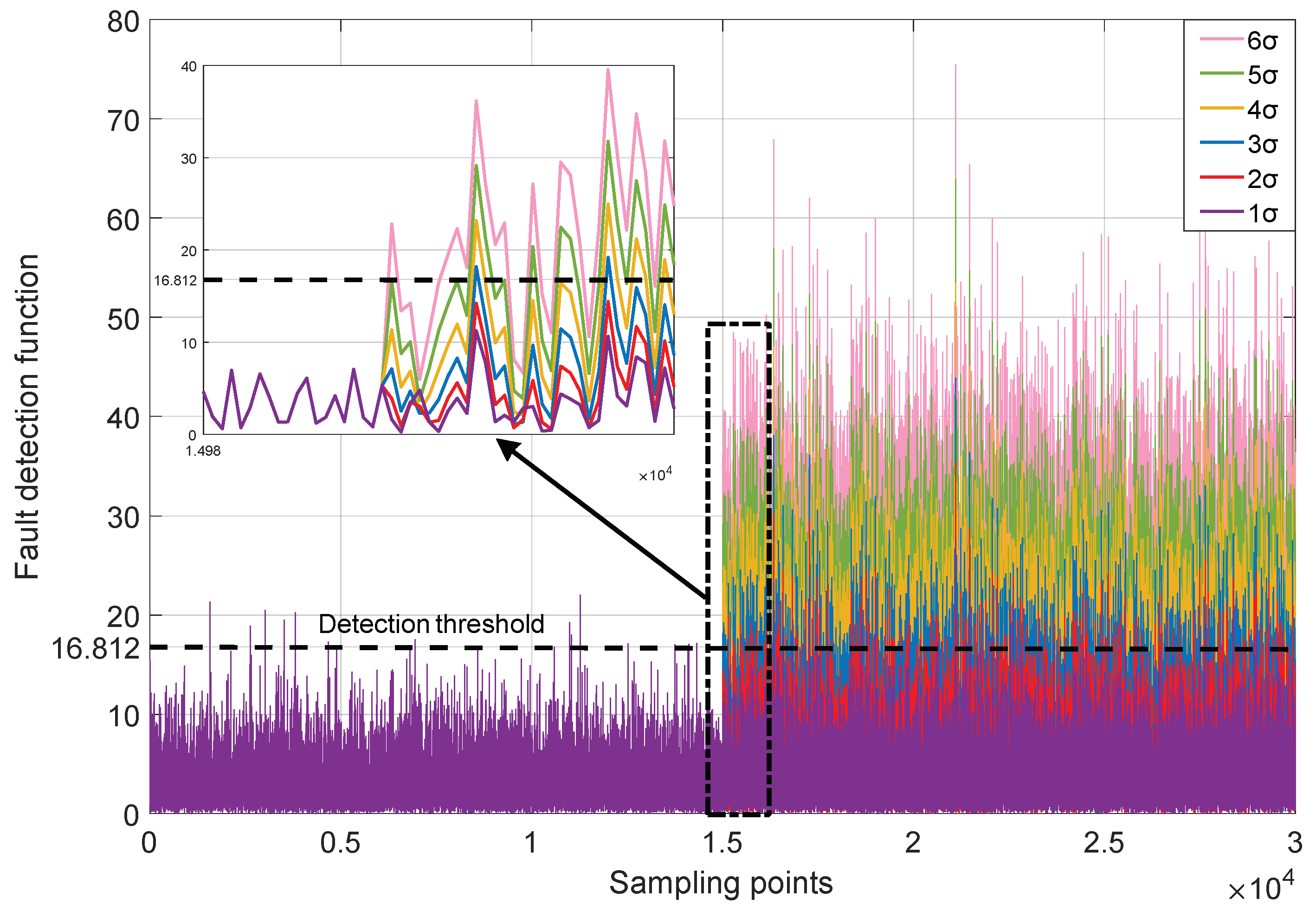
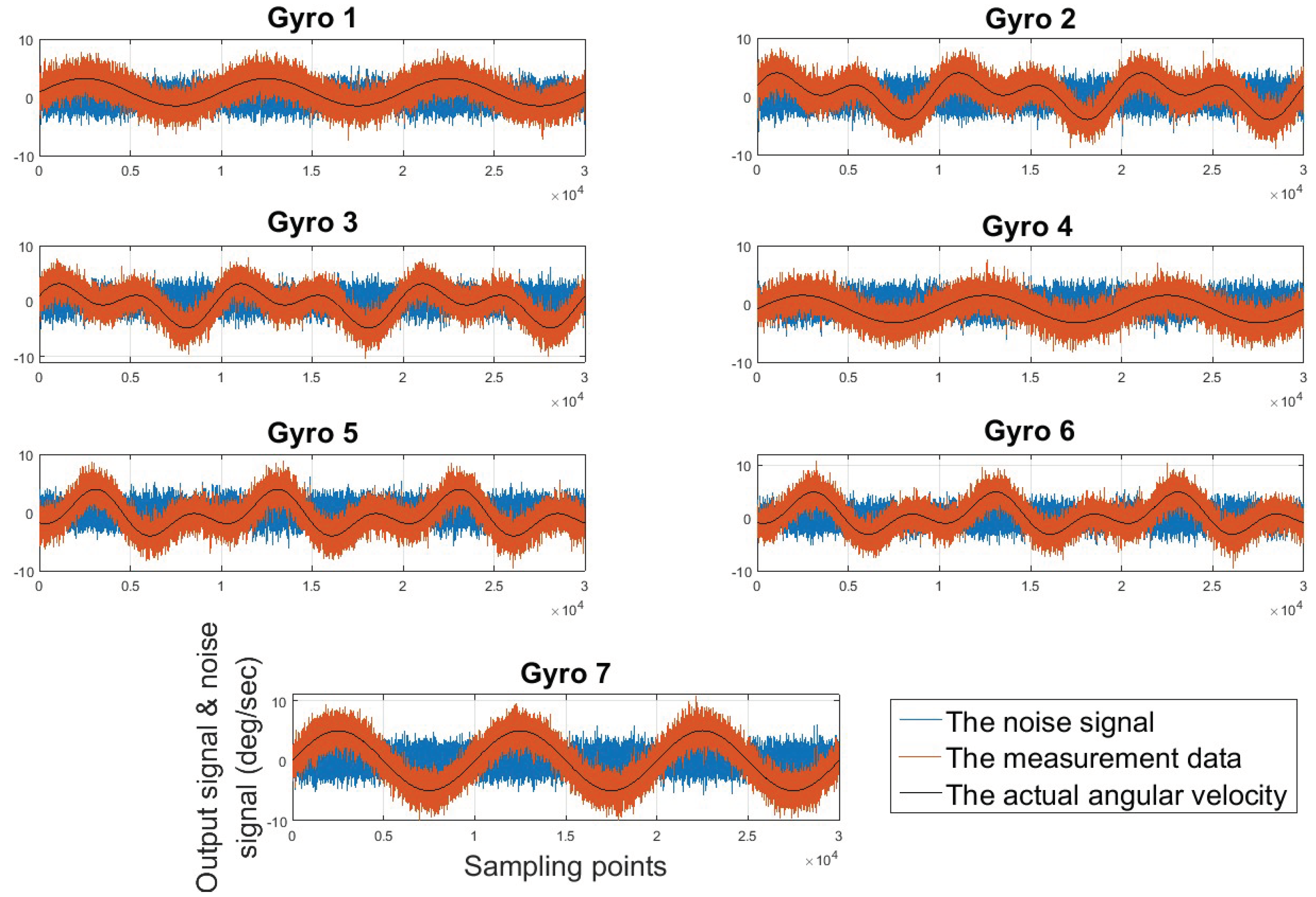
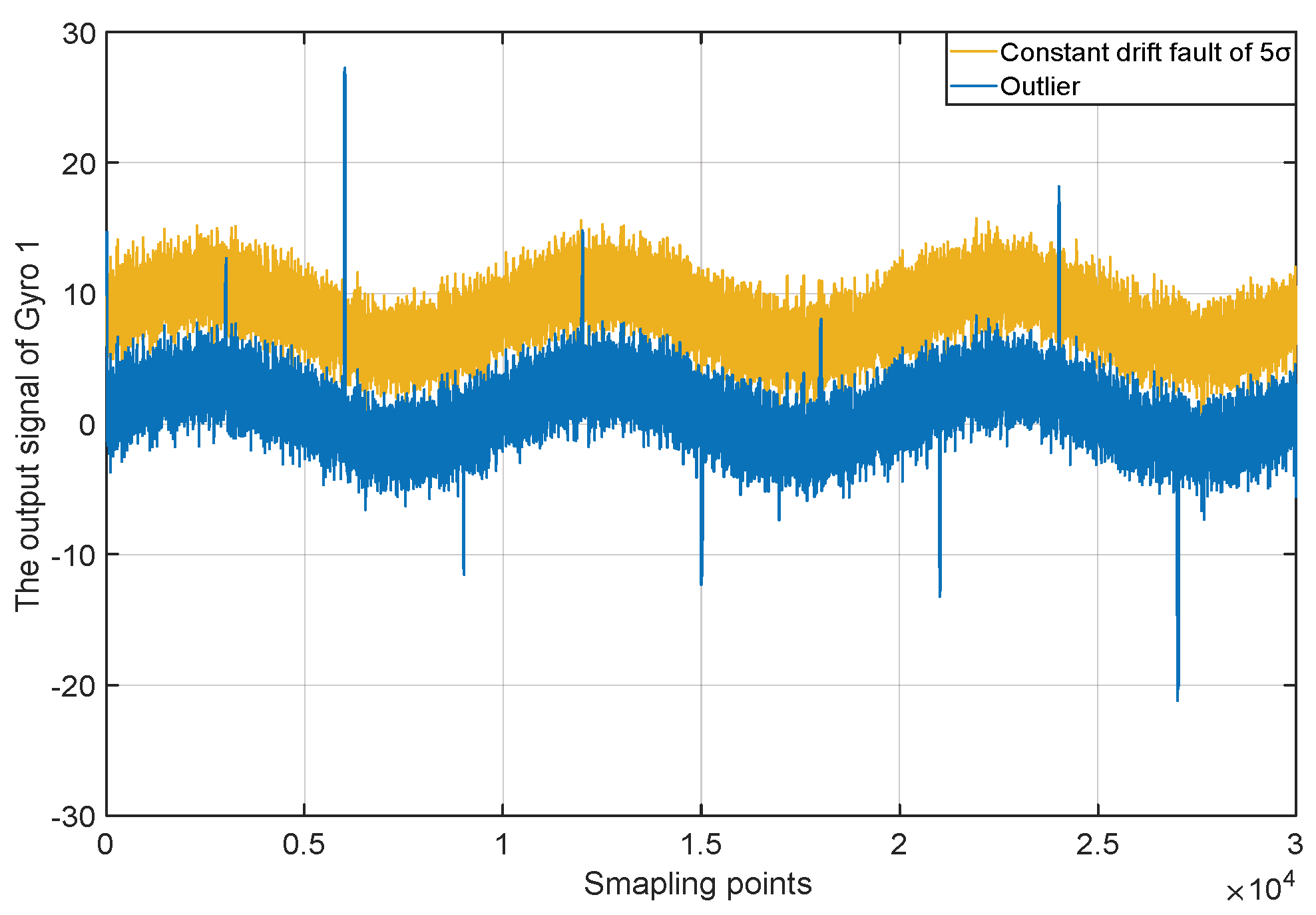
To solve the problem, most detection methods diagnose the system as faulty, when the anomaly detection function values exceed the detection threshold at a plurality of consecutive points, or exceed the threshold at a large part of points within a certain period of time. This strategy will bring the missed detection problem. For example, we use six MEMS gyros with the variance of
to build a RINS, and the redundant structure adopts the regular dodecahedron. The constant drift fault in varying deterioration degrees is injected into the normal measurement signals and the FDI performance is tested through the improved SVD based method. The measurement signals are simply marked as “
”, “
”, …, “
”, which means the
constant drift fault is injected into the original signal. The details are shown in
Figure 3 and
Figure 4 and
Table 2.
It can be seen from
Table 2 that when the anomalies are at the incipient level, the detection function will barely exceed the threshold, which leads to the correct detection rate to decrease lower than expected. In such cases, the anomalies exist in the measurement data, but they are likely to be ignored. Due to the miss-detected faults, the unbiasedness hypothesis of the weighted fusion algorithm is destroyed and the accuracy of the fusion estimation declines.
On the other hand, the outlier eliminating will cause the missed detection too. There are two approaches commonly used to deal with outliers [
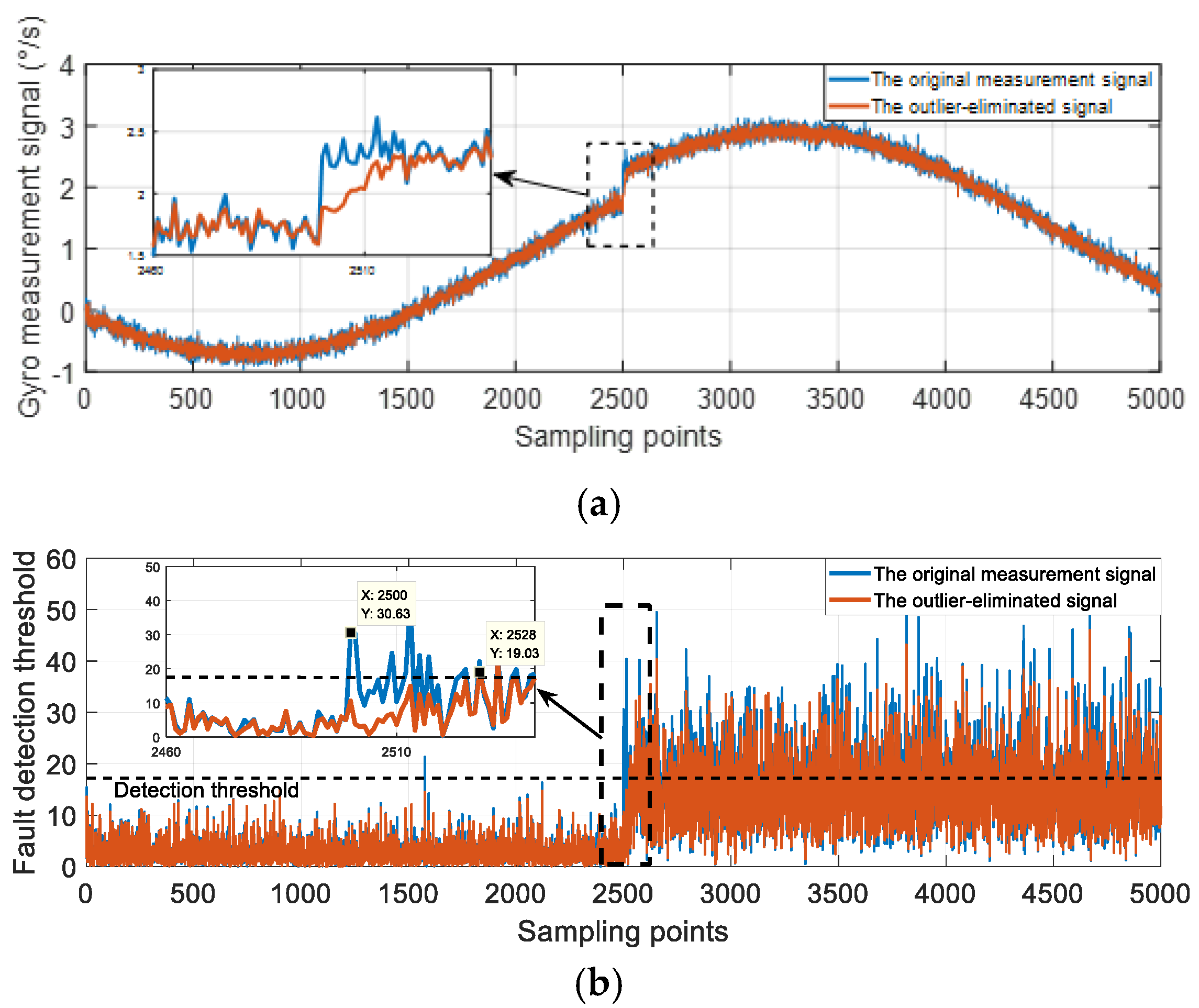
3]: One is to improve filter functions, which alleviate the impact of outliers by setting the weighted matrix or correcting the covariance matrix at every sampling moment; another one is to replace the detected outlier points with mean values or the points from fitted curves. The outlier eliminating methods regard every anomaly point as the outliers, so the anomaly points caused by faults will also be processed by these methods. Consequently, the deviation degree of the fault will decrease. Some faults that could have been detected are missed for this reason. For example,
Figure 5a shows a measurement signal with a
step mutation (marked as “the original measurement signal”), and this signal is processed through the outlier eliminating method in reference [
4]. The processed signal is shown as
Figure 5a too. The detection functions of two signals are shown in
Figure 5b. From
Figure 5b, the detection function of the processed signal is lower than the original signal case at most anomaly points. The outlier eliminating will change the characteristics of the faults. To be specific, the deviation degrees of the fault will diminish, so that some faults at a low deterioration degree will be missed. Additionally, the detection function of the processed signal exceeds the threshold at the 2528-th point, which is 0.28 s later than the situation without outlier eliminating. In other words, the outlier eliminating method will cause the fault detection to be delayed.
Due to the flaws analysed above, especially the missed detection problem, the fusion estimation method cannot reach the optimal performance, because the faults and outliers break the unbiasedness of the measurement signal. To sum up, the traditional fault-tolerant strategies have some flaws, and the problems mentioned above are hard to avoid. Because of the poor stability and accuracy of MEMS sensors, these problems are more serious in MEMS-RINS.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}