Assessment of Stickiness with Pressure Distribution Sensor Using Offset Magnetic Force

 , , and
, , and
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
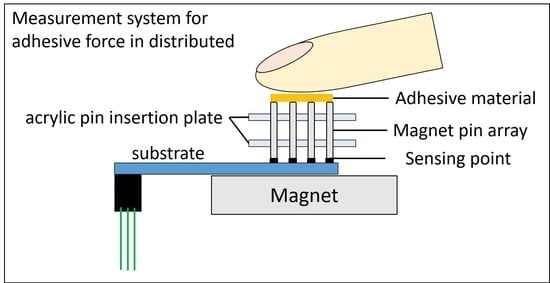
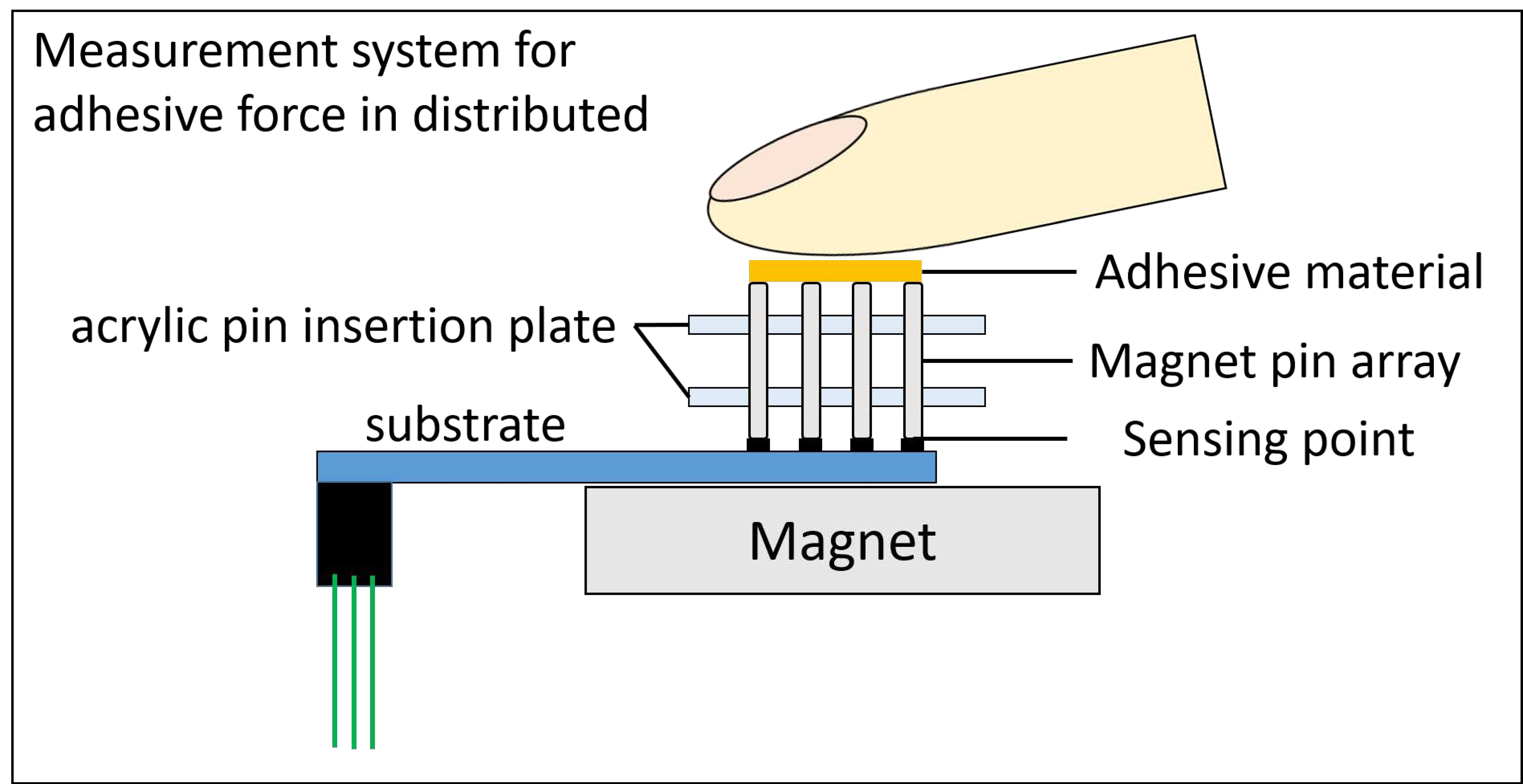
2. Measuring System
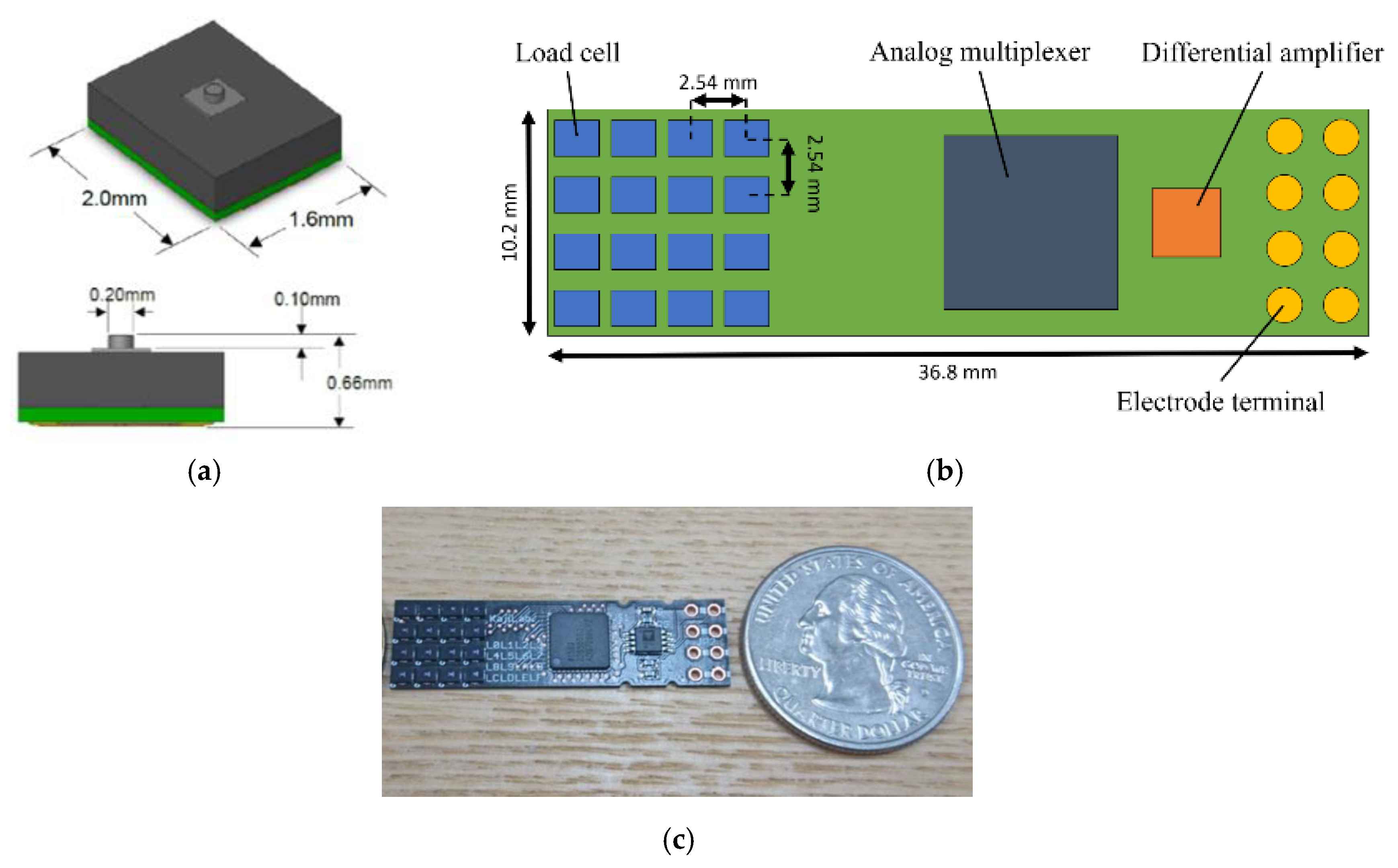
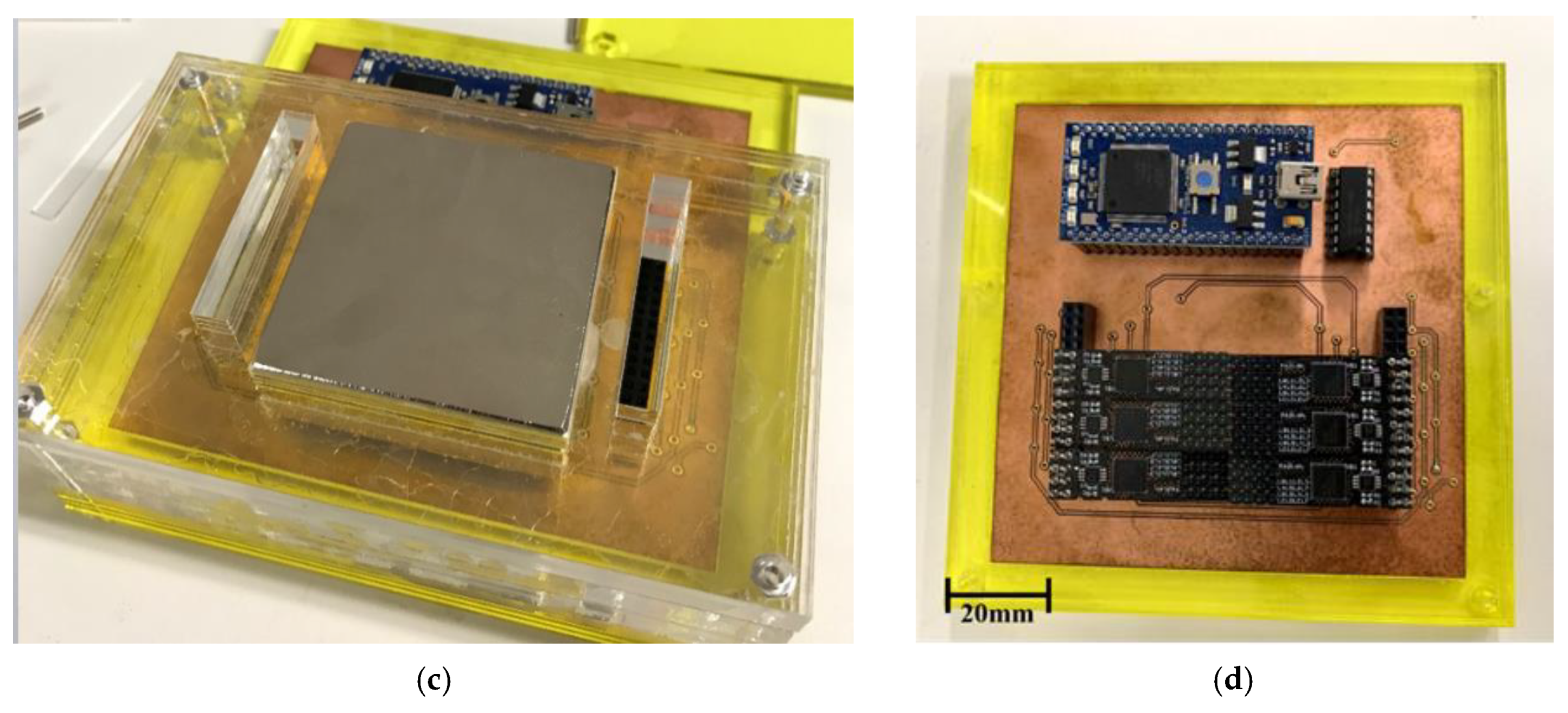
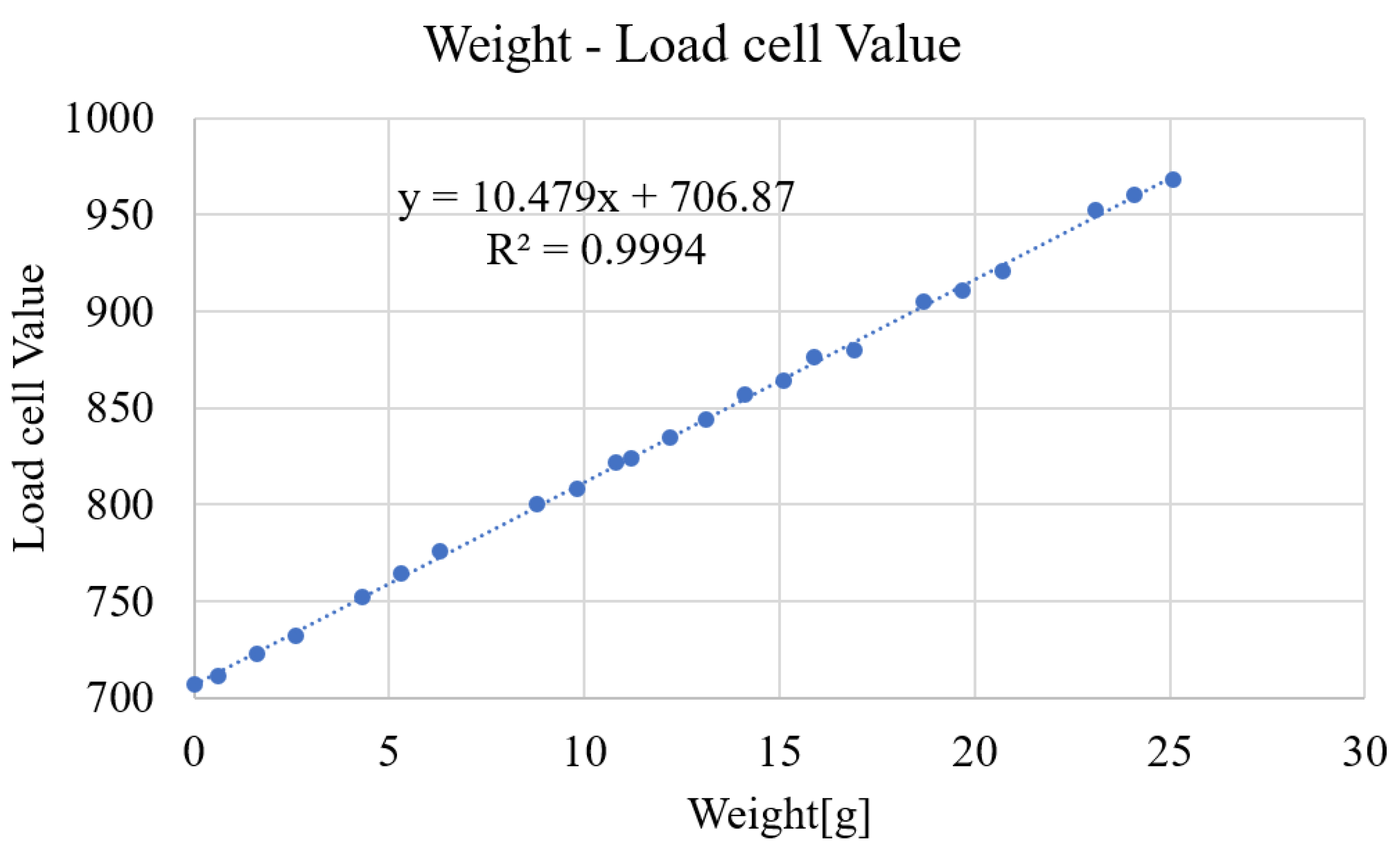
2.1. Pressure Distribution Sensor Using Load Cell
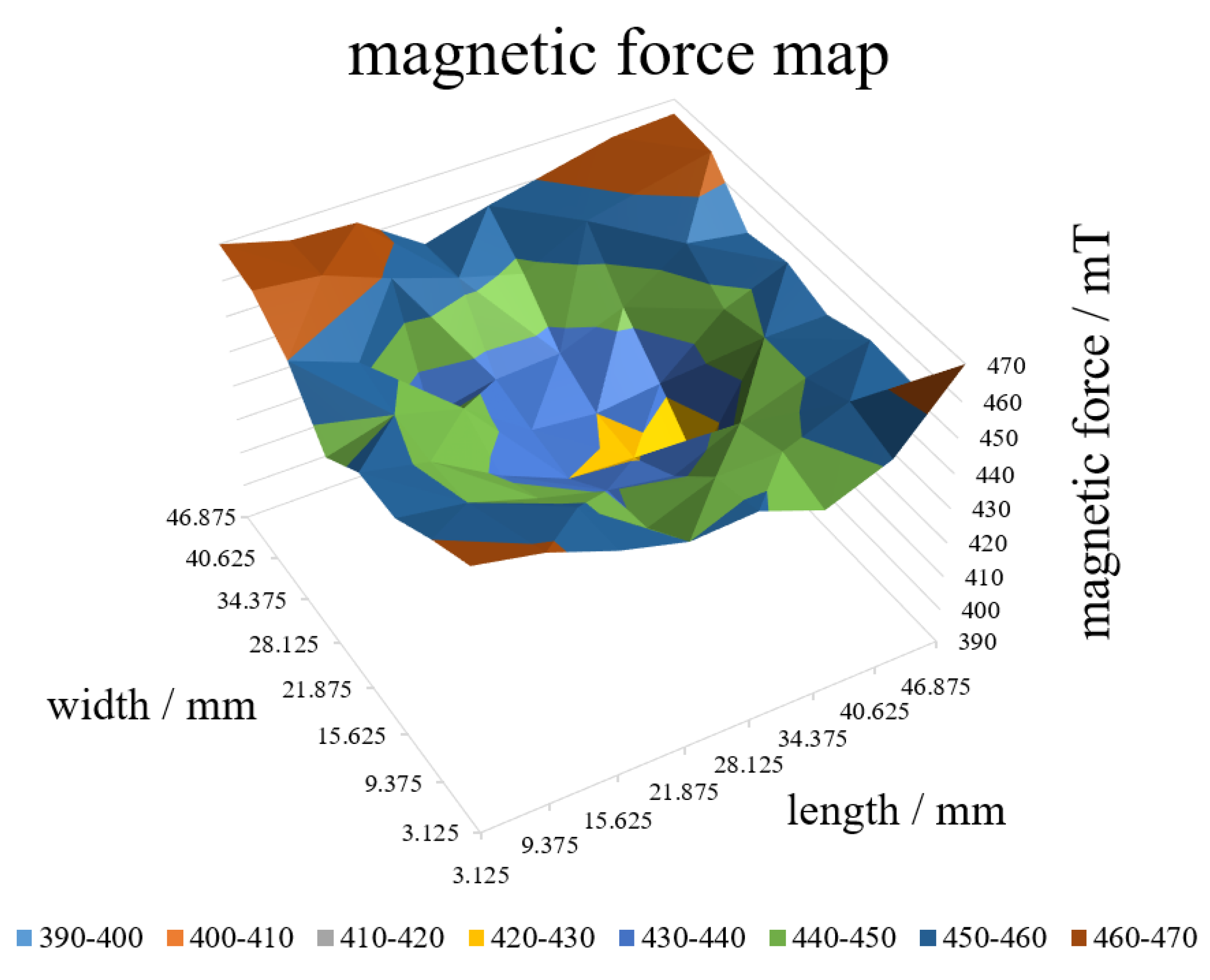
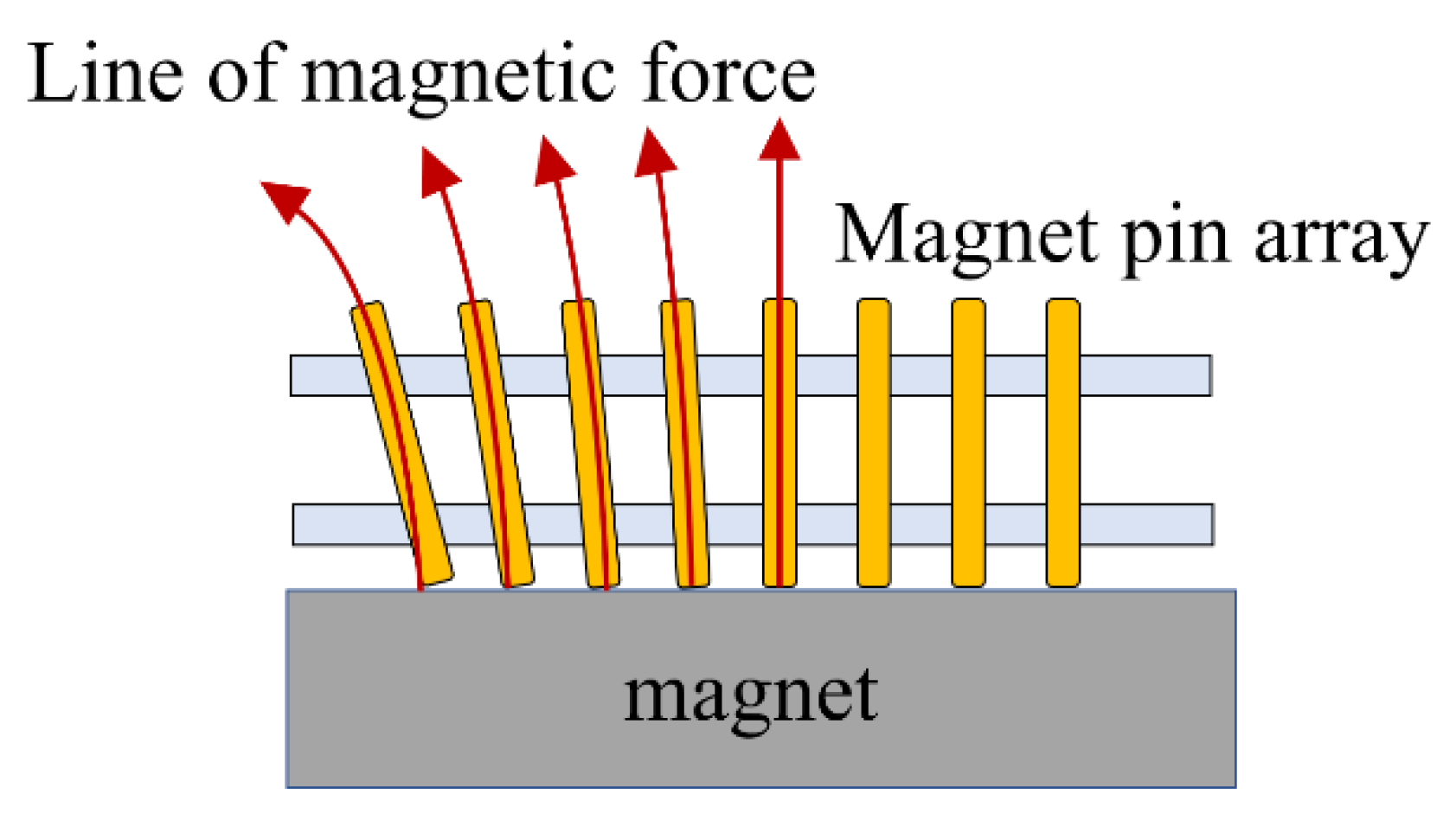
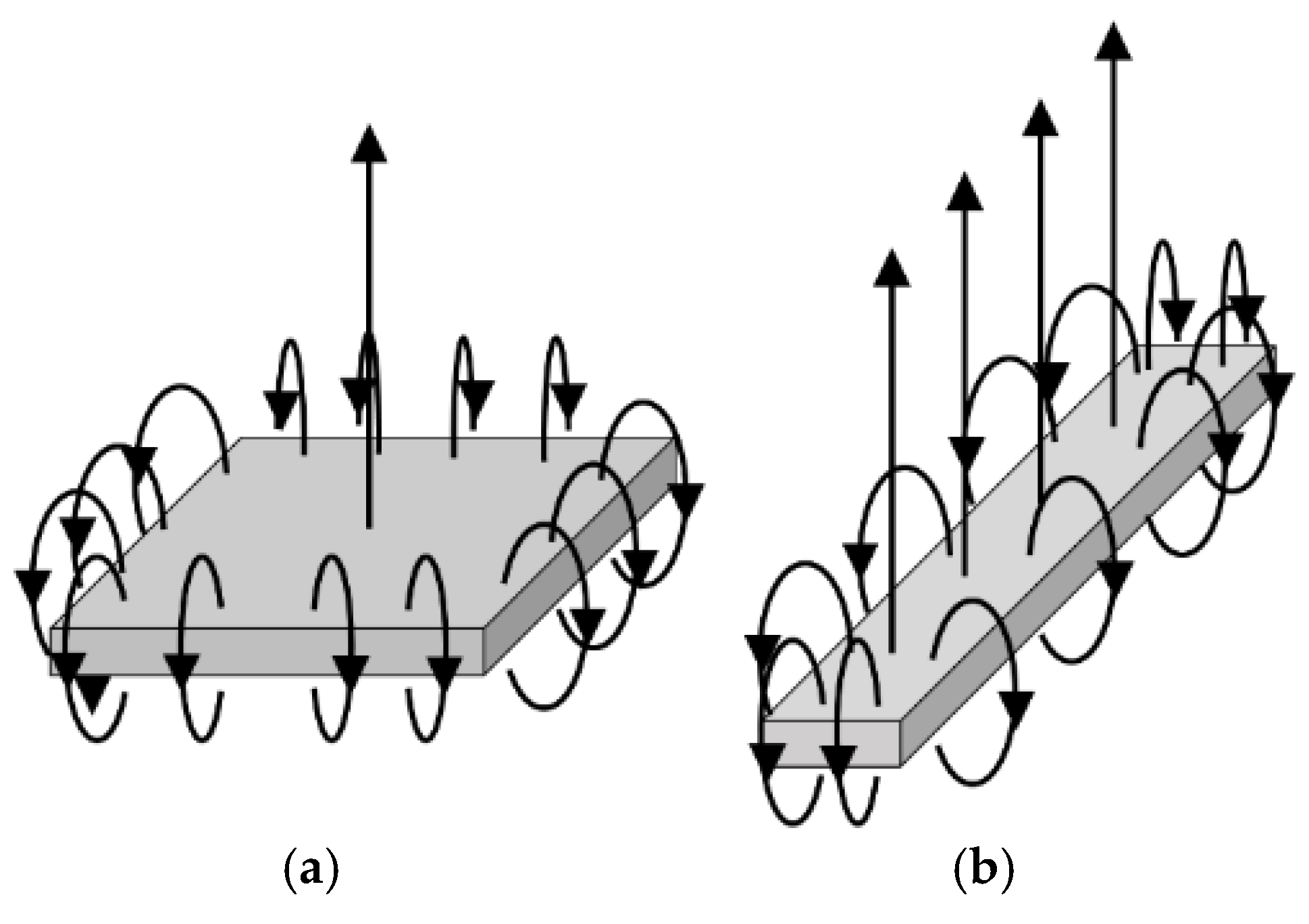
2.2. Offset Pressure Generated by Magnetic Force
2.3. Preliminary Experiment
2.4. Results and Discussion
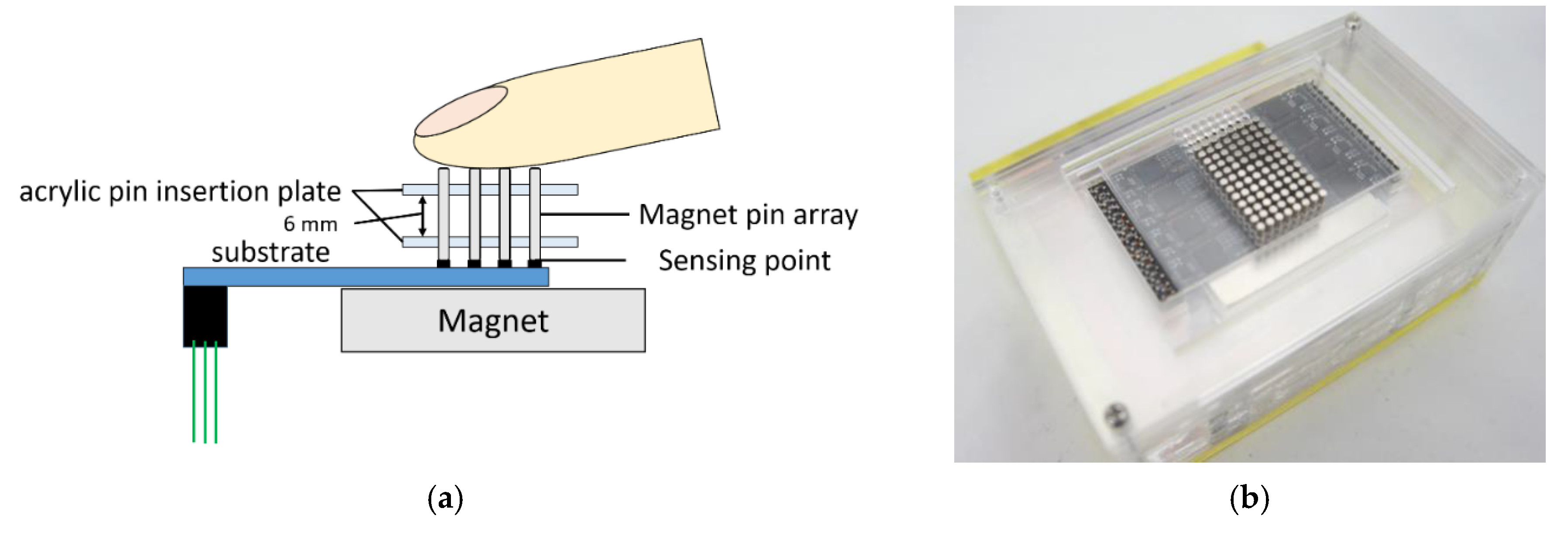
3. Improvement of Measuring System
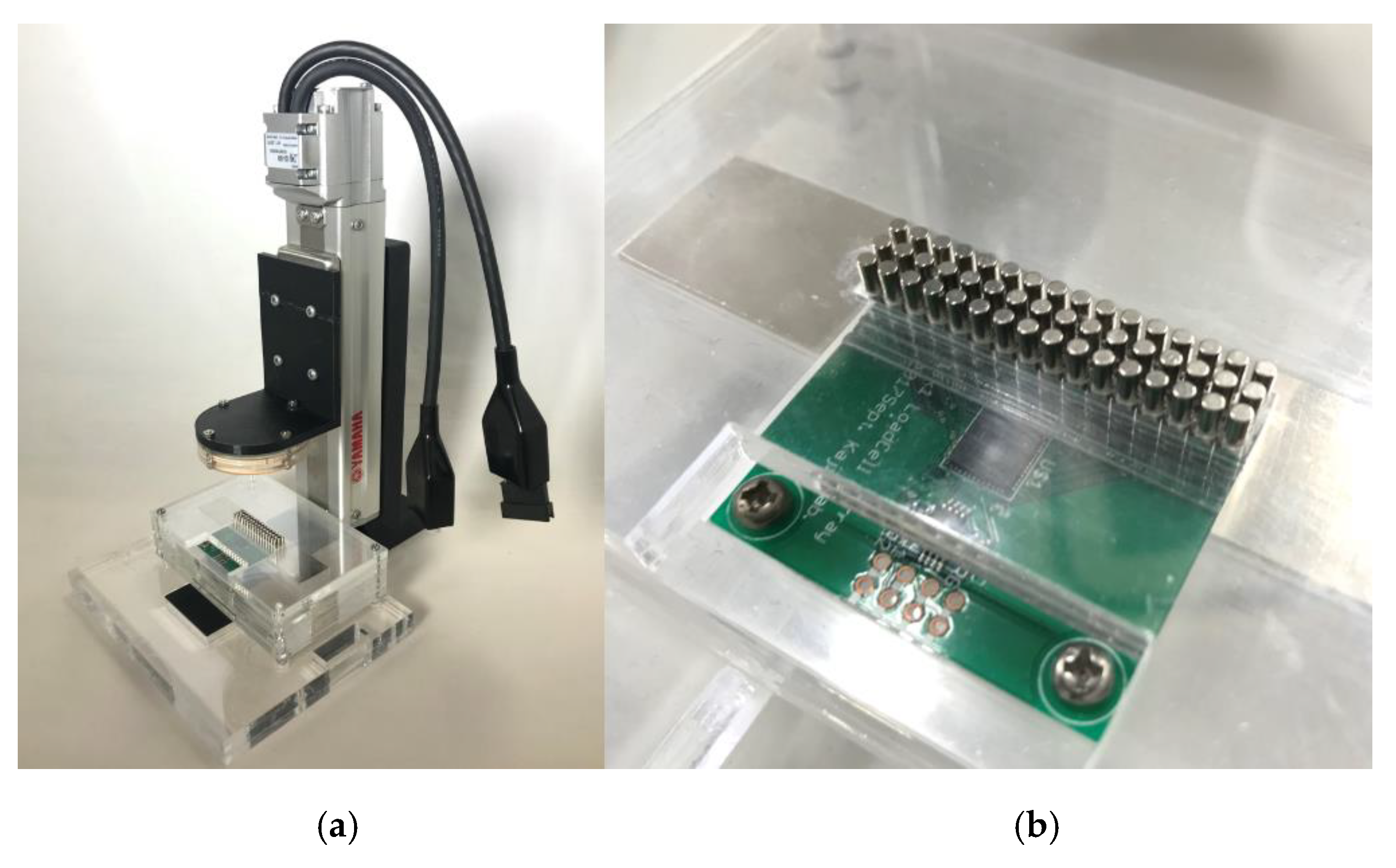
3.1. Measuring System Using Single-Axis Robot
3.2. Experiment 1
3.3. Results and Discussion
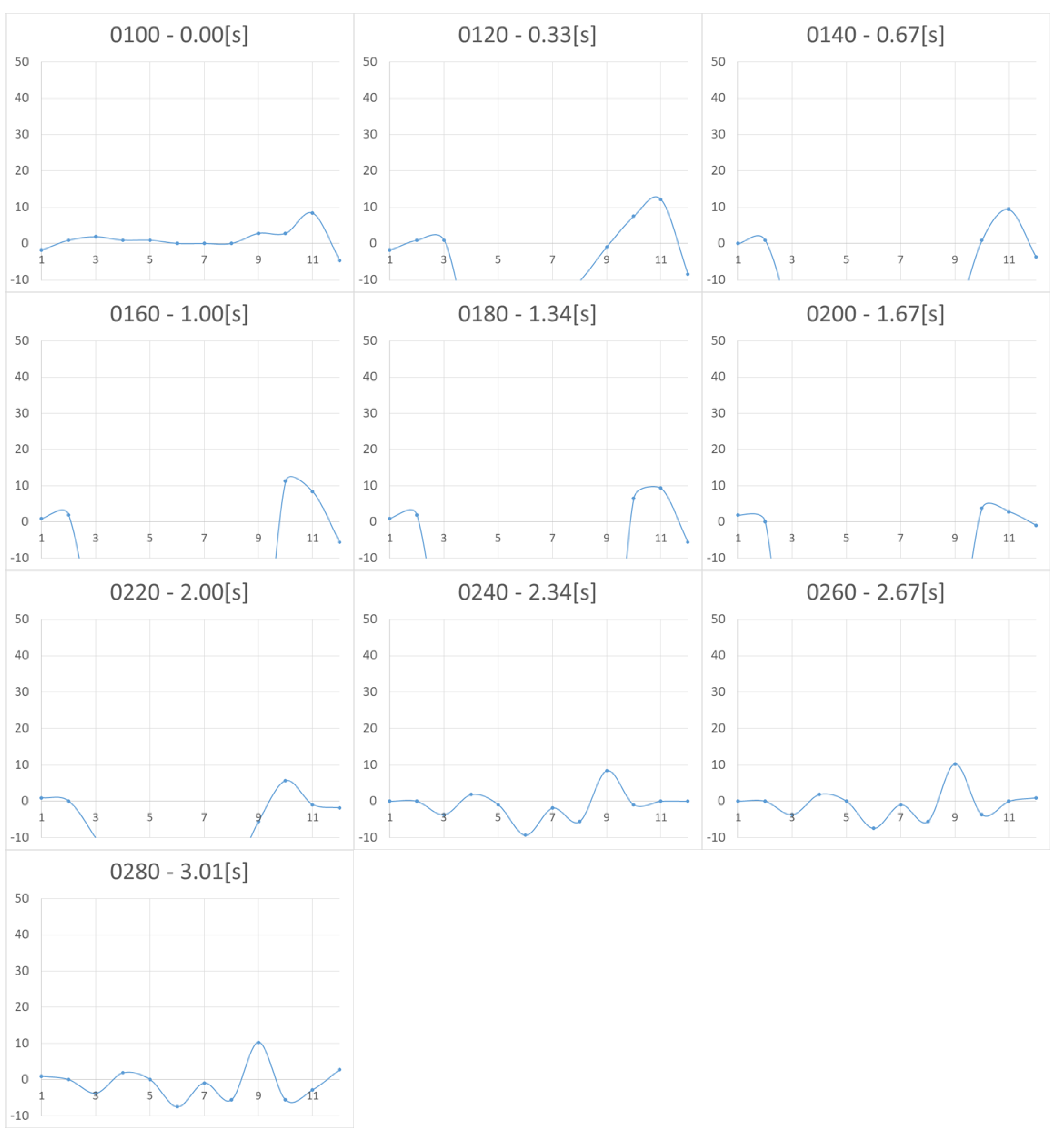
3.4. Experiment 2
3.5. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hayward, V.; Levesque, V. Experimental evidence of lateral skin strain during tactile exploration. In Proceedings of the Eurohaptics, Dublin, Ireland, 6–9 July 2003. [Google Scholar]
- Bicchi, A.; Scilingo, E.P.; and De Rossi, D. Haptic discrimination of softness in teleoperation: the role of the contact area spread rate. IEEE Trans. Rob. Autom. 2000, 16, 496–504. [Google Scholar] [CrossRef]
- Kimura, F.; Yamamoto, A.; Higuchi, T. Development of a contact width sensor for tactile tele-presentation of softness. In Proceedings of the 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 34–39. [Google Scholar]
- Levesque, V.; Jerome, P.; Hayward, V. Braille Display by Lateral Skin Deformation with the STReSS2 Tactile Transducer. In Proceedings of the Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC’07), sukaba, Japan, 22–24 March 2007; pp. 115–120. [Google Scholar]
- Schorr, S.B.; Okamura, A.M. Three-Dimensional Skin Deformation as Force Substitution: Wearable Device Design and Performance During Haptic Exploration of Virtual Environments. IEEE Trans. Haptic 2017, 10, 418–430. [Google Scholar] [CrossRef] [PubMed]
- Fujita, K.; Ikeda, Y. Remote haptic sharing of elastic soft objects. Proceedings of The First Joint Eurohaptics Conference and Symposium on Haptic Interface for Virtual Environment and Teleoperator Systems, Pisa, Italy, 18–20 March 2005. [Google Scholar]
- Endo, T.; Kusakabe, A.; Kazuma, Y.; Kawasaki, H. Haptic Interface for Displaying Softness at Multiple Fingers: Combining a Side-Faced-Type Multifingered Haptic Interface Robot and Improved Softness-Display Devices. IEEE/ASME Trans. Mechatron. 2016, 21, 2343–2351. [Google Scholar] [CrossRef]
- Bau, O.; Poupyrev, I.; Isrer, A.; Harrison, C. TeslaTouch: Electrovibration for Touch Surfaces. In Proceedings of the 23nd annual ACM symposium on User interface software and technology, New York, NY, USA, 3–6 October 2010; pp. 283–292. [Google Scholar]
- Chen, X.; Shao, F.; Barnes, C.; Childs, T.; Henson, B. Exploring Relationships between Touch Perception and Surface Physical Properties. Int. J. Des. 2009, 3, 67–76. [Google Scholar]
- Tiest, W.M.B.; Kosters, N.D.; Kappers, A.M.L.; Daanen, H.A.M. Haptic perception of wetness. Acta Psychol 2012, 141, 159–163. [Google Scholar] [CrossRef] [PubMed]
- Filingeri, D.; Fournet, D.; Hodder, S.; Havenith, G. Why wet feels wet? A neurophysiological model of human cutaneous wetness sensitivity. J. Neurophysiol. 2014, 112, 1457–1469. [Google Scholar] [CrossRef] [PubMed]
- Fisher, T.H. What we touch, touches us: Materials, affects, and affordances. Des. Issue. 2004, 20, 20–31. [Google Scholar] [CrossRef]
- Liu, H.; Bhushan, B. Adhesion and friction studies of microelectromechanical systems/nanoelectromechanical systems materials using a novel microtriboapparatus. J. Vac. Sci. Technol. A 2003, 21, 1528–1538. [Google Scholar] [CrossRef]
- Yamaoka, M.; Yamamoto, A.; Higuchi, T. Basic Analysis of Stickiness Sensation for Tactile Displays. In Computer Science; Springer: Berlin, Heidelberg, Germany, 2008; pp. 427–436. [Google Scholar]
- Angioloni, A.; Collar, C. Bread crumb quality assessment: a plural physical approach. Eur. Food Res. Technol. 2009, 229, 21–30. [Google Scholar] [CrossRef]
- Liu, Z.; Scanlon, M.G. Modelling Indentation of Bread Crumb by Finite Element Analysis. Biosystems Eng. 2003, 85, 477–484. [Google Scholar] [CrossRef]
- Dan, H.; Watanabe, H.; Dan, I.; Kohyama, K. Effects of textural changes in cooked apples on the human bite, and instrumental tests. J. Texture Stud. 2003, 34, 499–514. [Google Scholar] [CrossRef]
- Kameoka, T.; Takahashi, A.; Yem, V.; Hiroyuki, K. Measurement of Stickiness with Pressure Distribution Sensor. In Haptic Interaction; Springer: Singapore, 2016; pp. 315–319. [Google Scholar]
- Kameoka, T.; Takahashi, A.; Vibol, Y.; Kajimoto, H. Quantification of stickiness using a pressure distribution sensor. In Proceedings of the 2017 IEEE World Haptics Conference (WHC), Munich, Germany, 6–9 June 2017; pp. 617–622. [Google Scholar]
- Sidney, W. Intensive and Extensive Aspects of Tactile Sensitivity as a Function of Body Part, Sex and Laterality; Thomas International Publishing: New York, NY, USA, 1968; pp. 195–222. [Google Scholar]

















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kameoka, T.; Takahashi, A.; Yem, V.; Kajimoto, H.; Matsumori, K.; Saito, N.; Arakawa, N. Assessment of Stickiness with Pressure Distribution Sensor Using Offset Magnetic Force. Micromachines 2019, 10, 652. https://doi.org/10.3390/mi10100652
Kameoka T, Takahashi A, Yem V, Kajimoto H, Matsumori K, Saito N, Arakawa N. Assessment of Stickiness with Pressure Distribution Sensor Using Offset Magnetic Force. Micromachines. 2019; 10(10):652. https://doi.org/10.3390/mi10100652
Chicago/Turabian StyleKameoka, Takayuki, Akifumi Takahashi, Vibol Yem, Hiroyuki Kajimoto, Kohei Matsumori, Naoki Saito, and Naomi Arakawa. 2019. "Assessment of Stickiness with Pressure Distribution Sensor Using Offset Magnetic Force" Micromachines 10, no. 10: 652. https://doi.org/10.3390/mi10100652
APA StyleKameoka, T., Takahashi, A., Yem, V., Kajimoto, H., Matsumori, K., Saito, N., & Arakawa, N. (2019). Assessment of Stickiness with Pressure Distribution Sensor Using Offset Magnetic Force. Micromachines, 10(10), 652. https://doi.org/10.3390/mi10100652