
Sea Wind Measurement by Doppler Navigation System with X-Configured Beams in Rectilinear Flight

 ,
,  ,
,  ,
, 

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Doppler Navigation System Functions and Applications
2.2. Near-Surface Wind Measuring
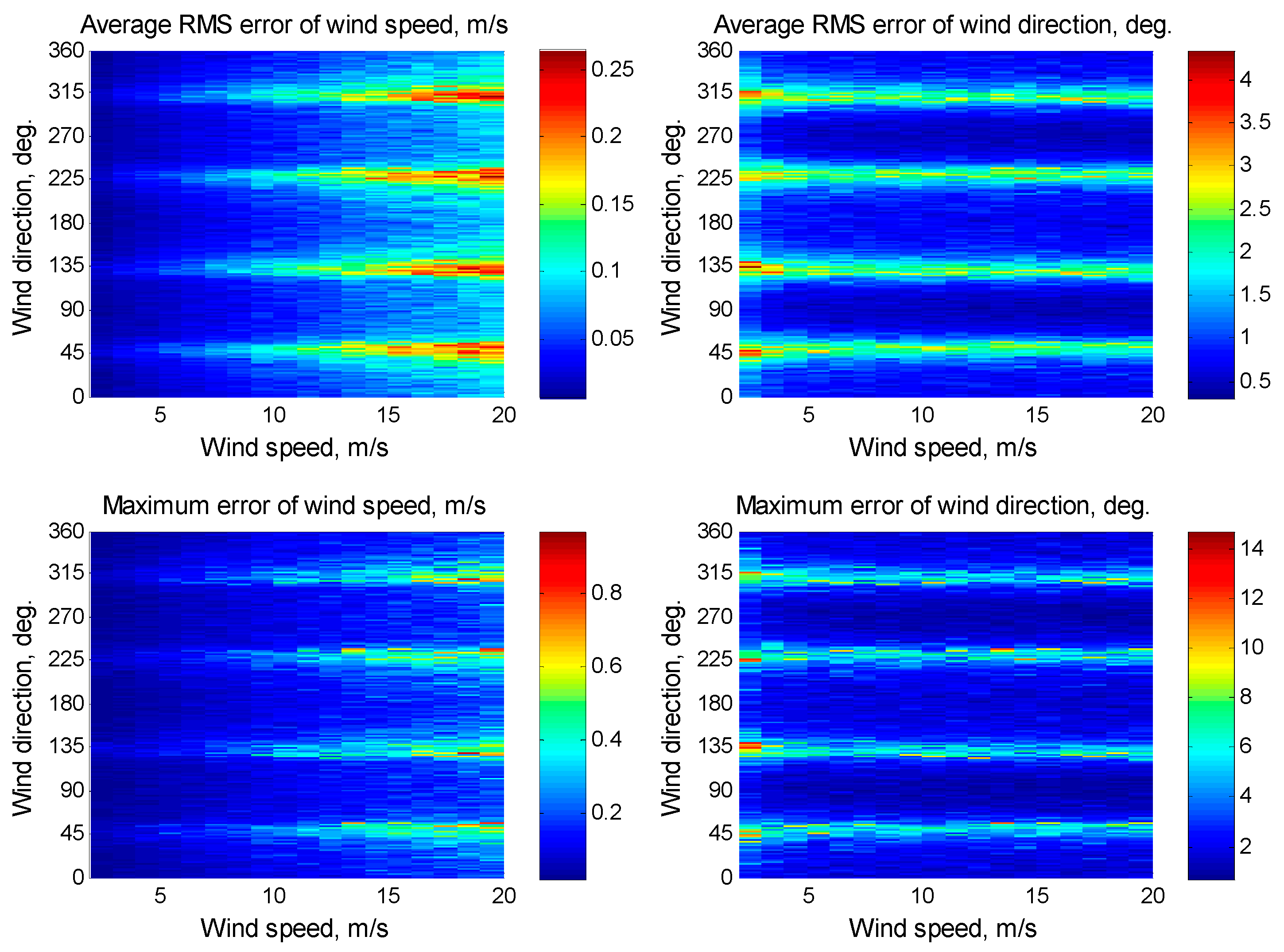
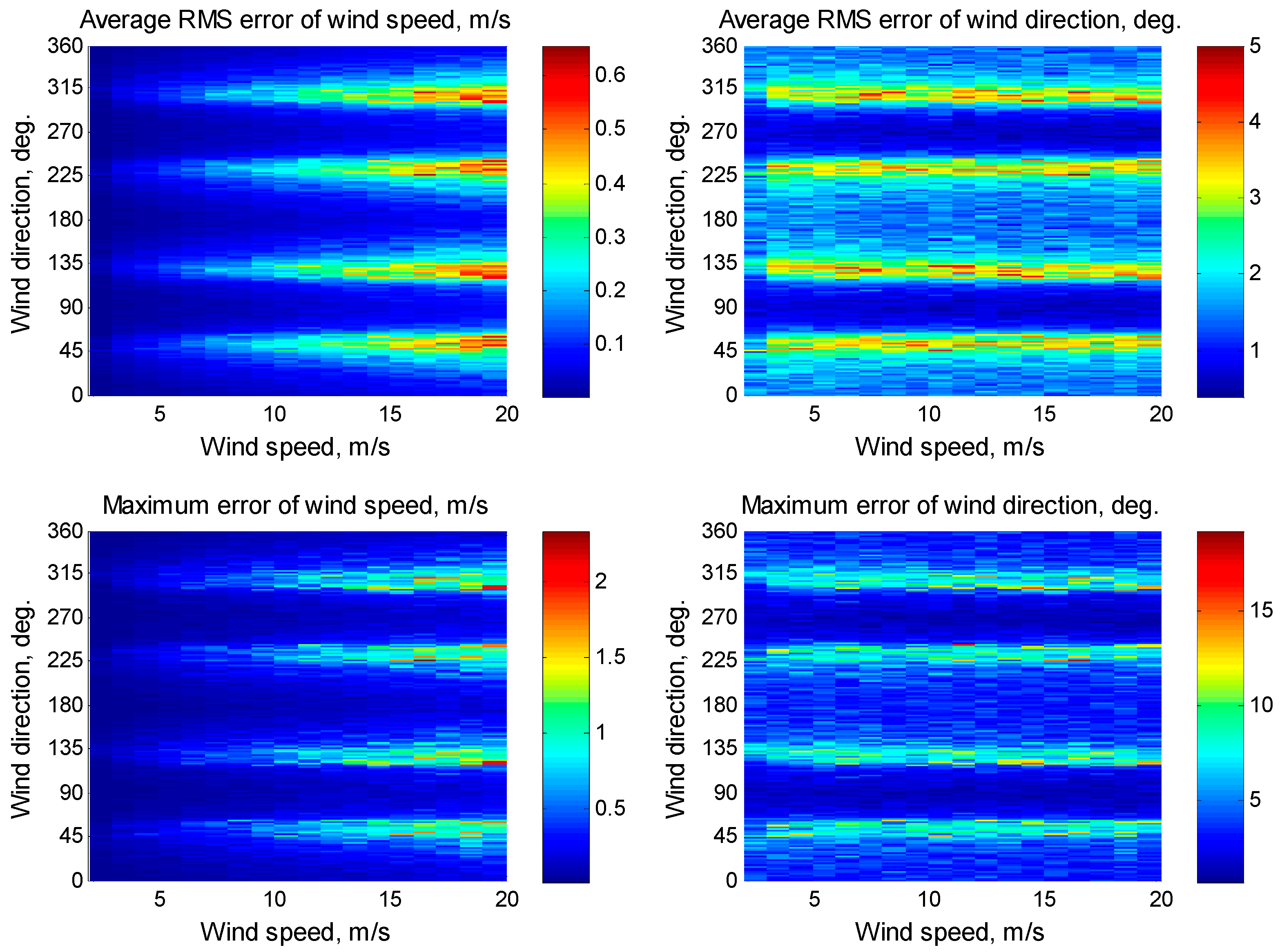
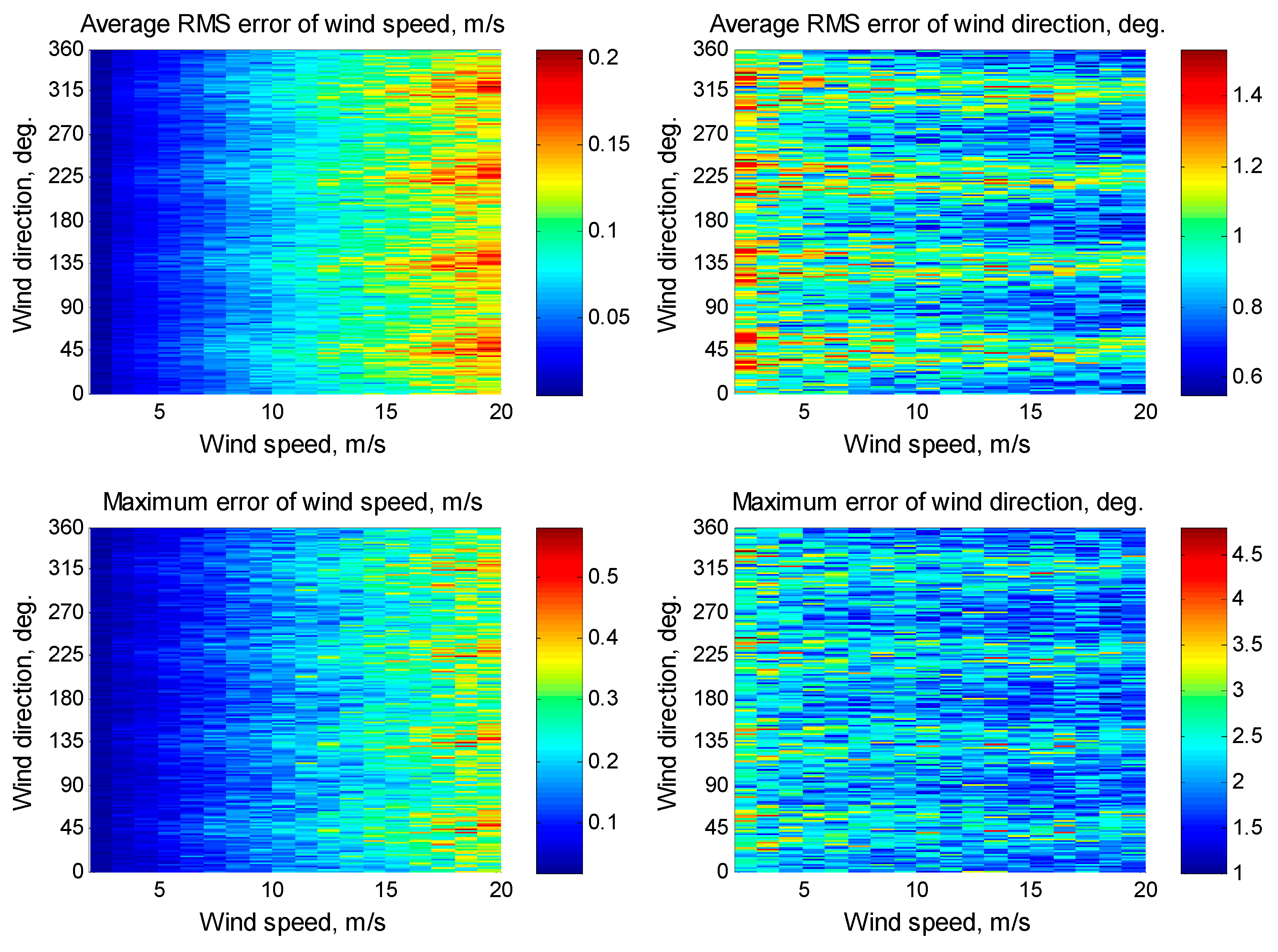
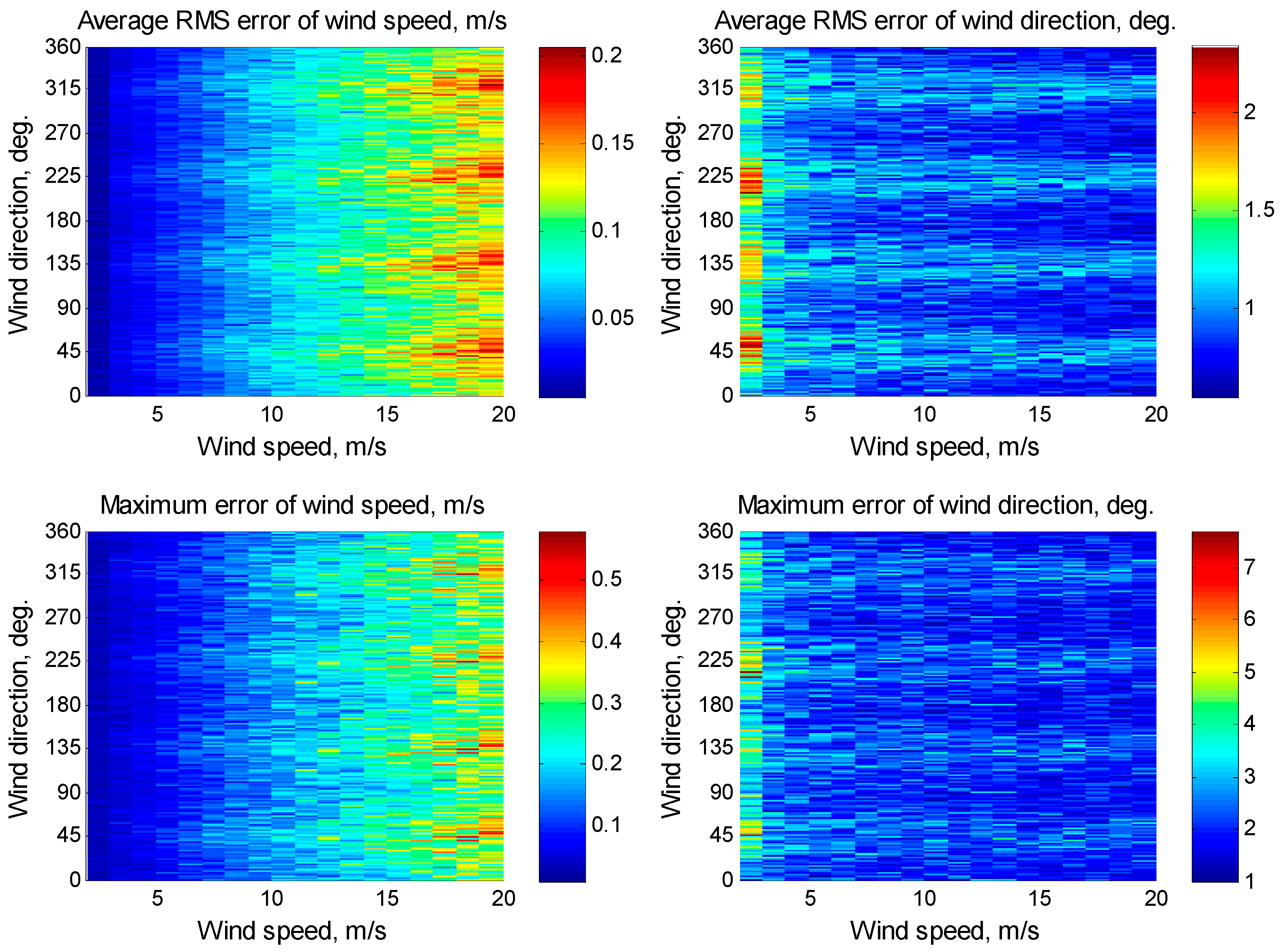
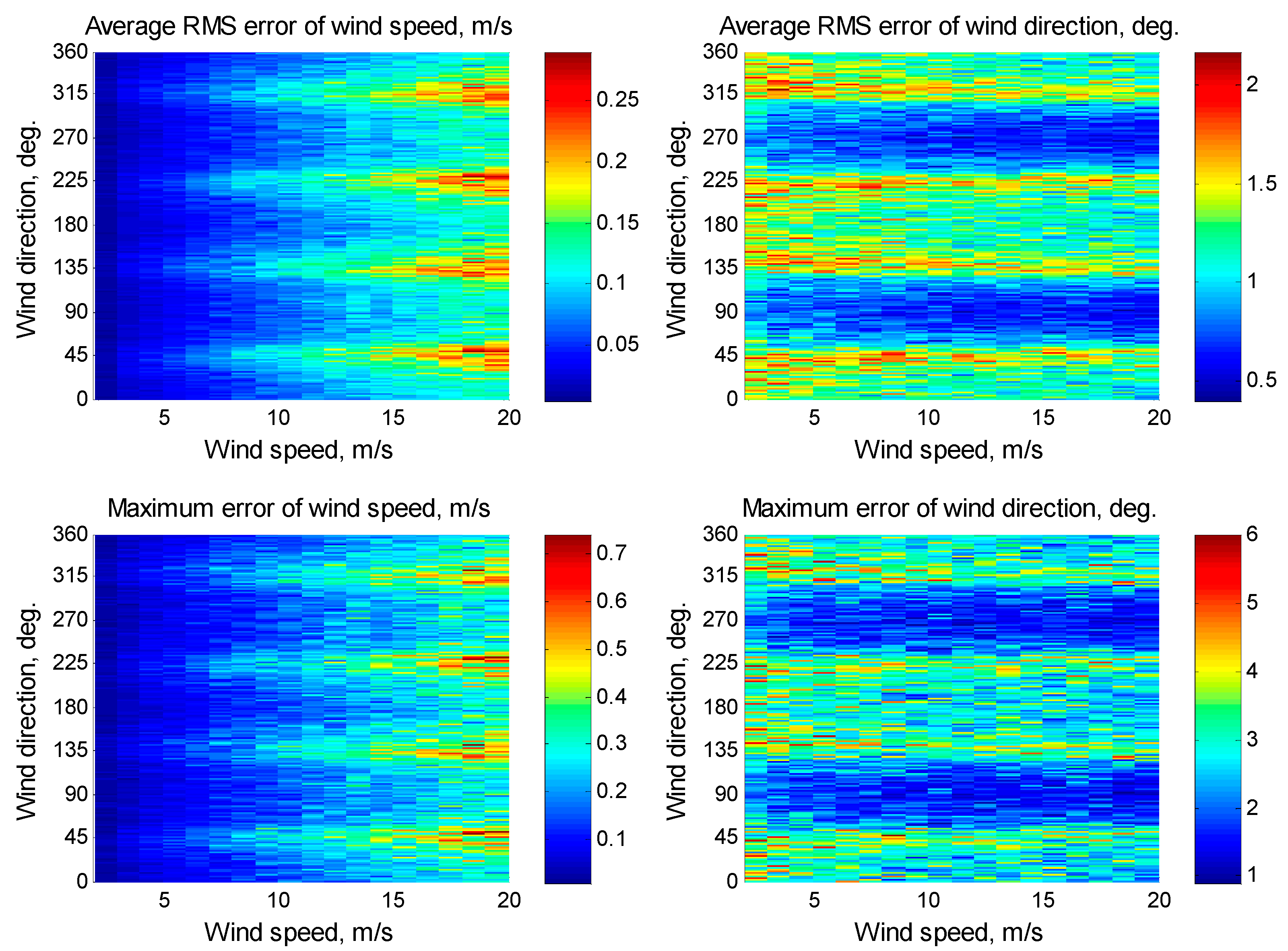
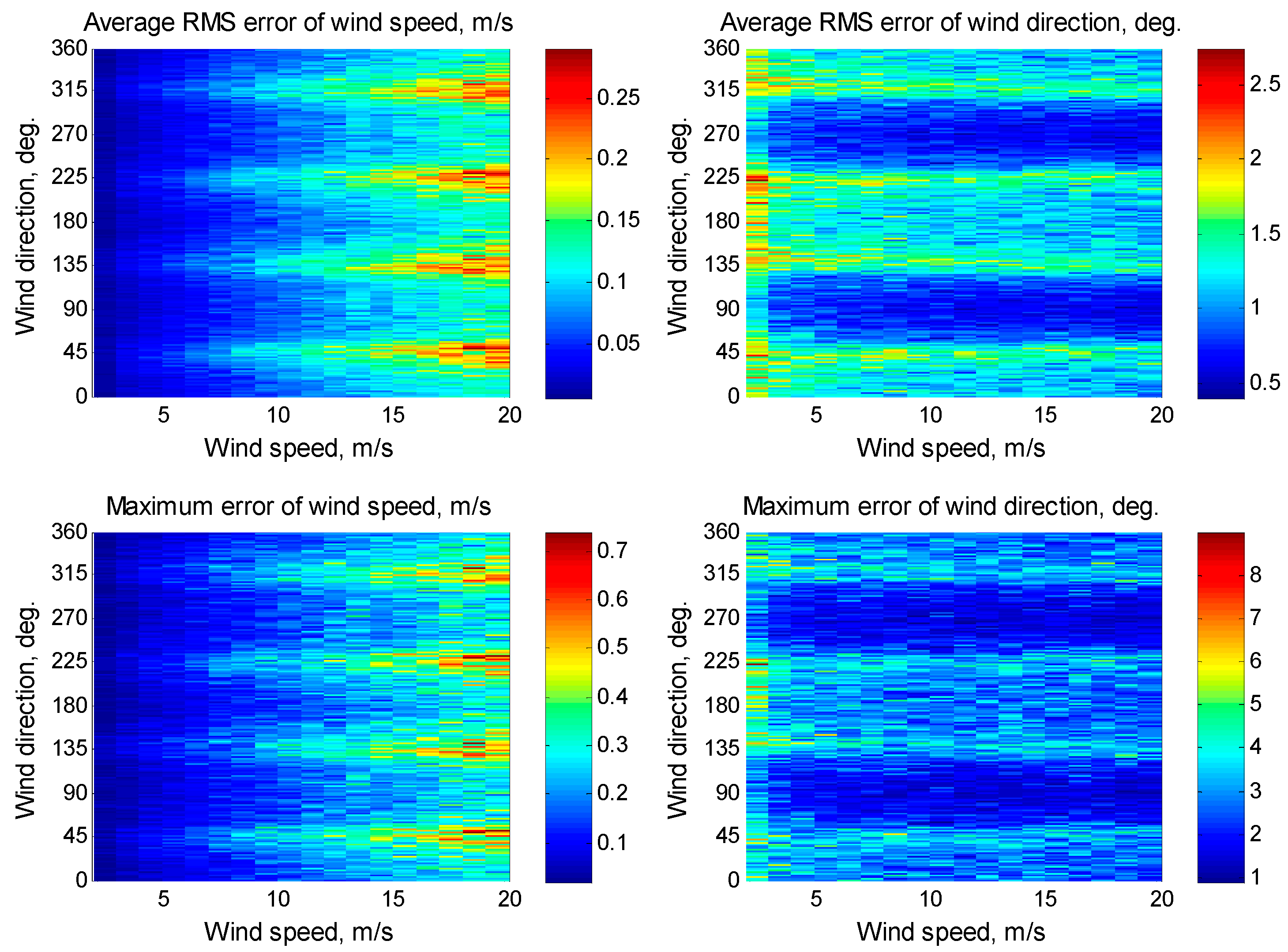
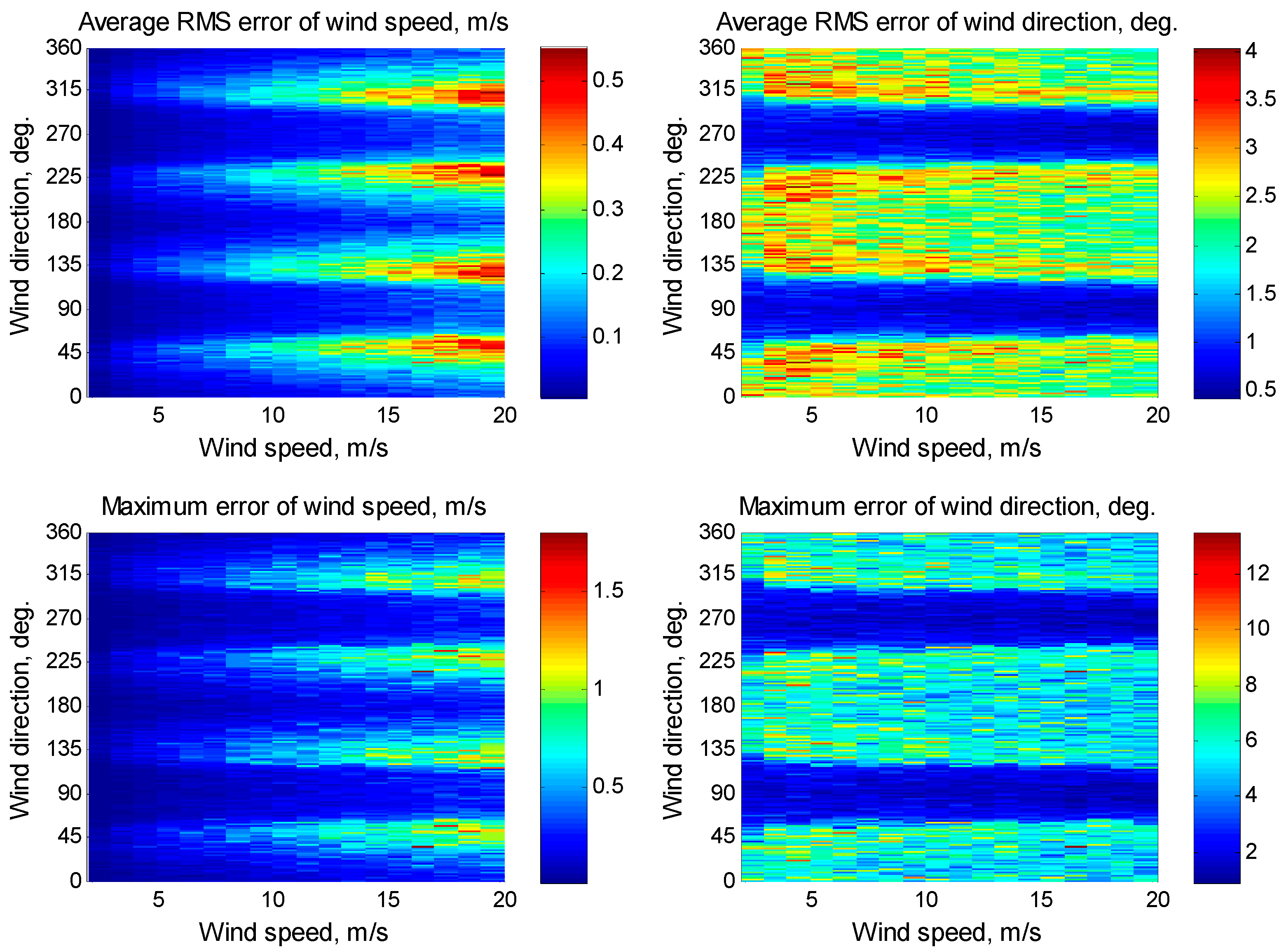
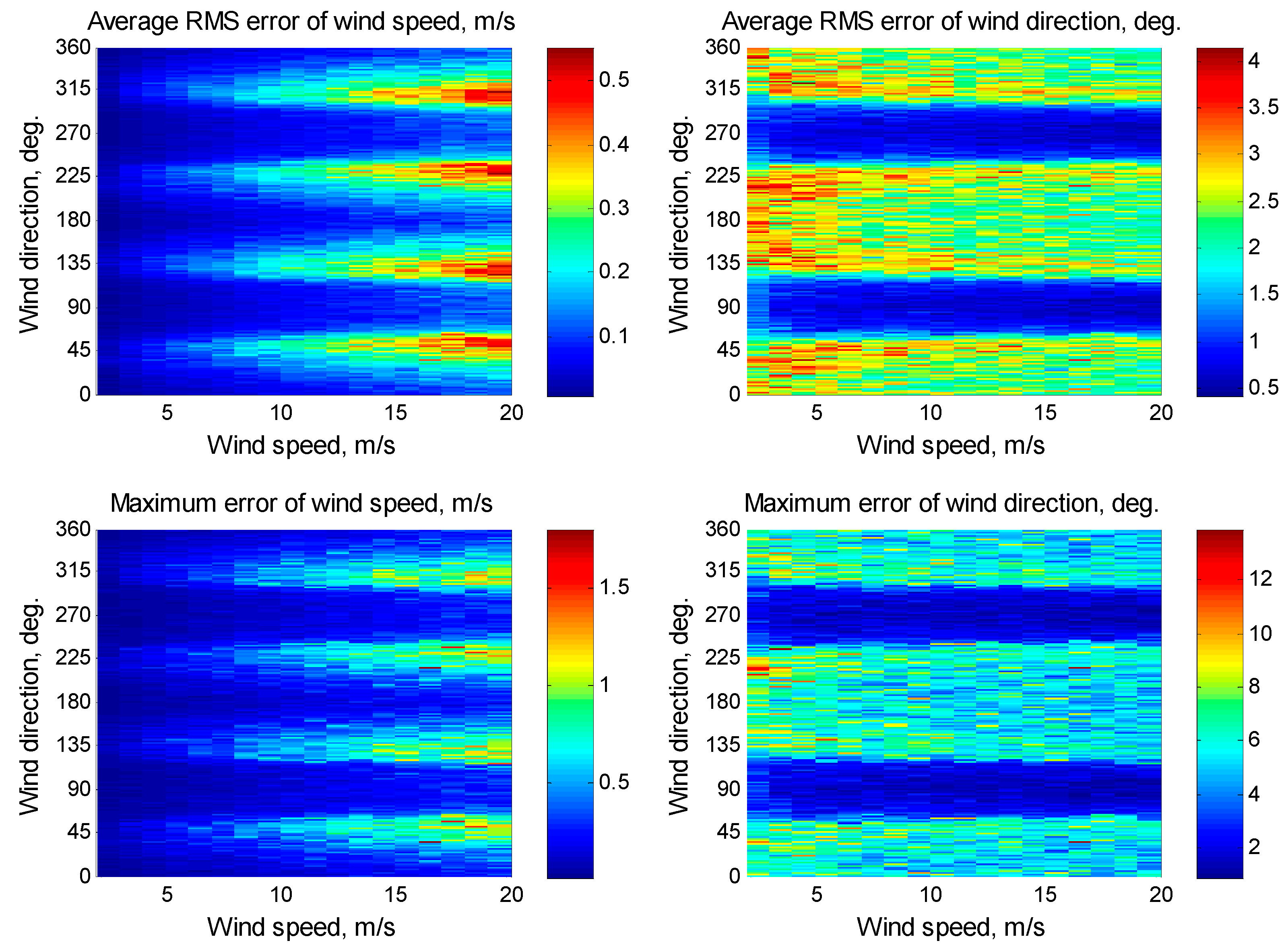
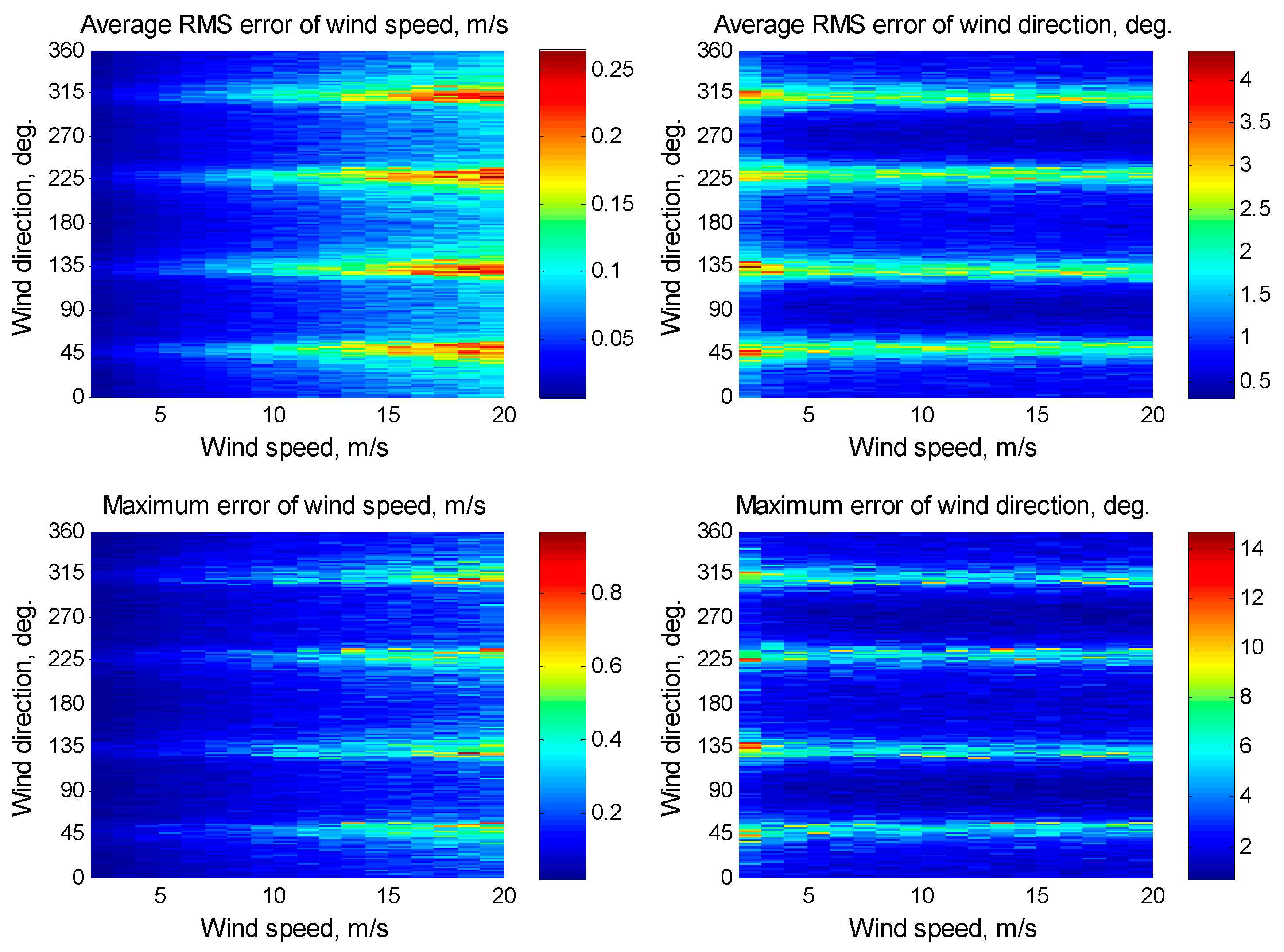
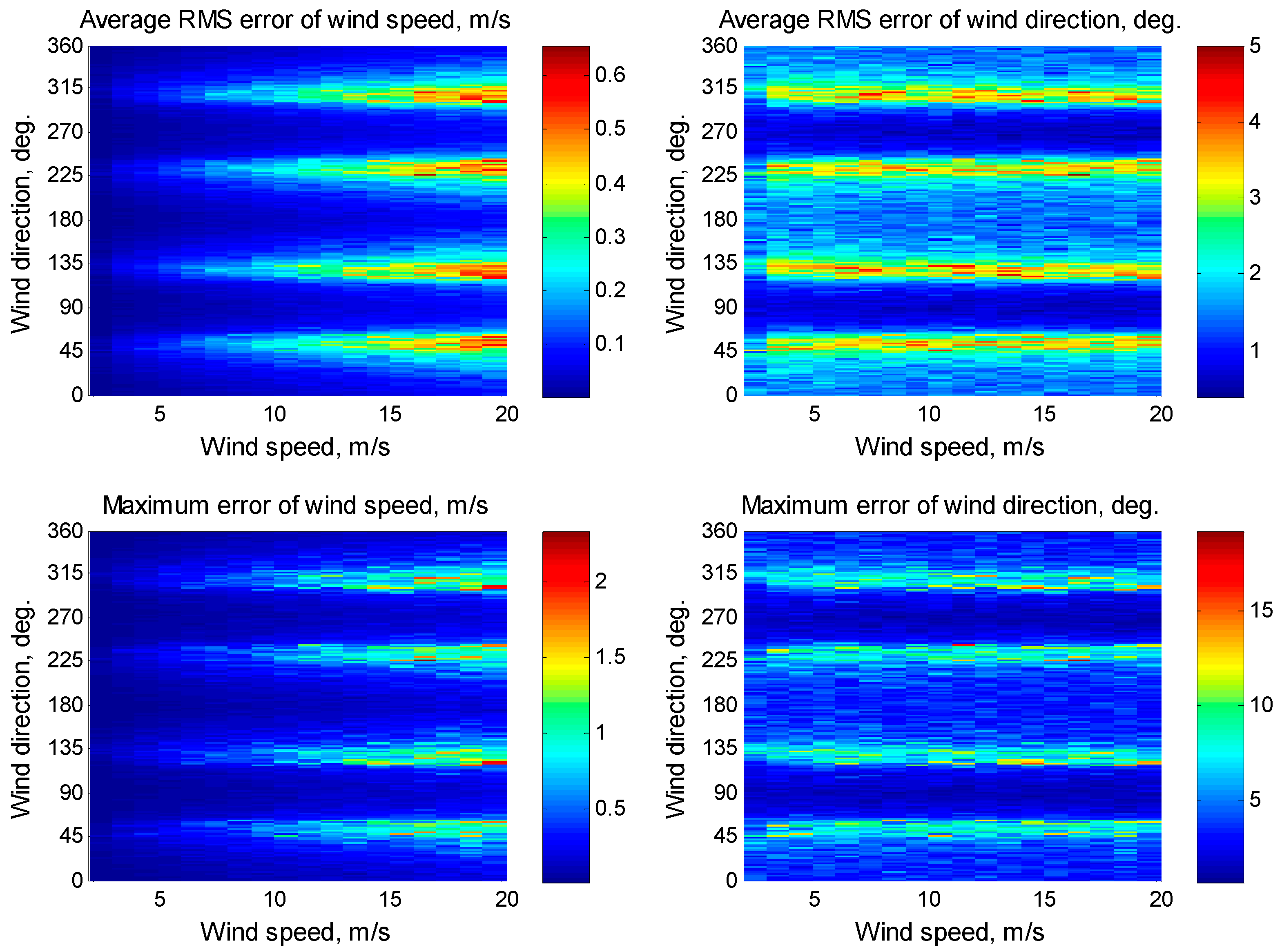
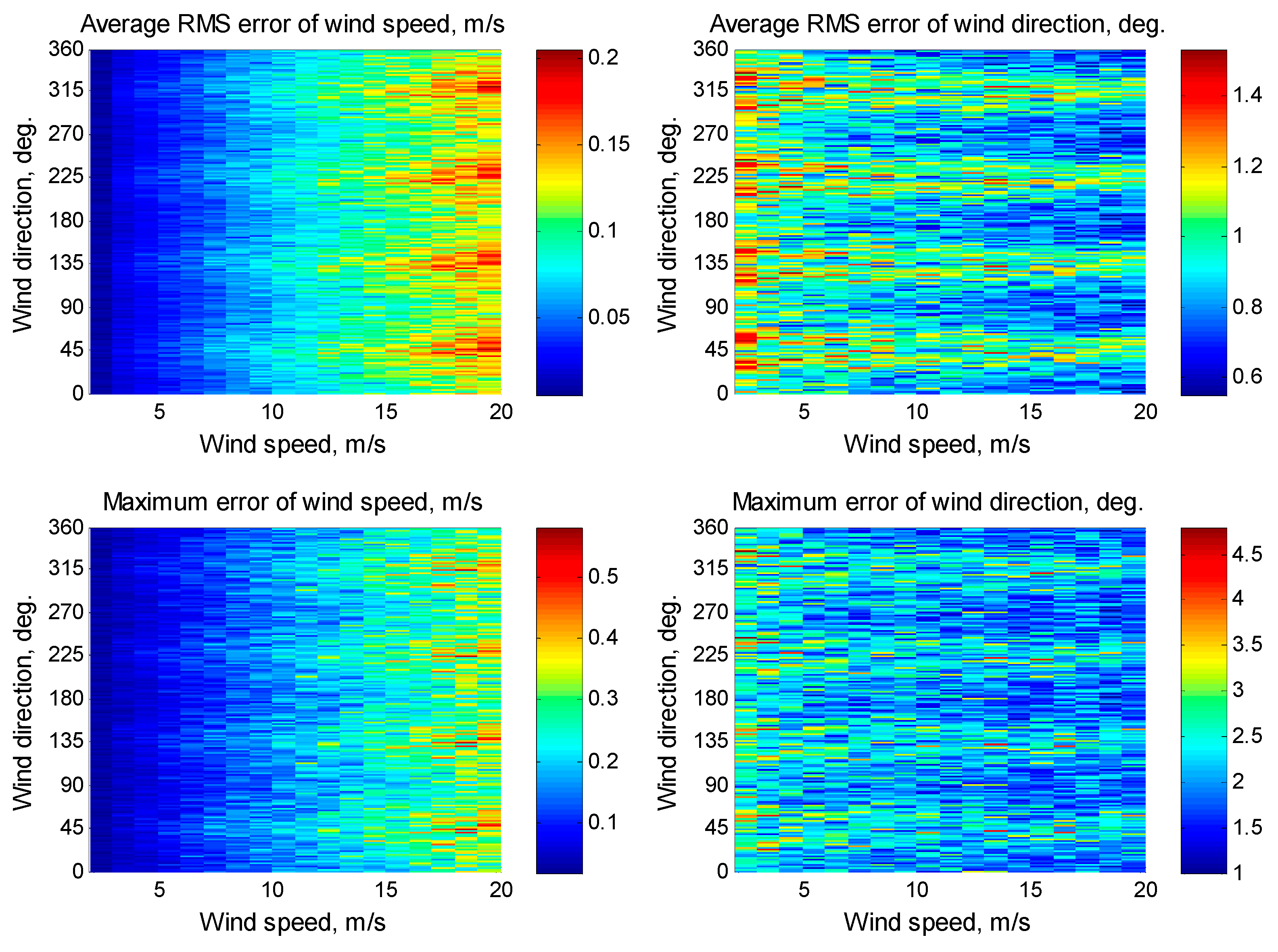
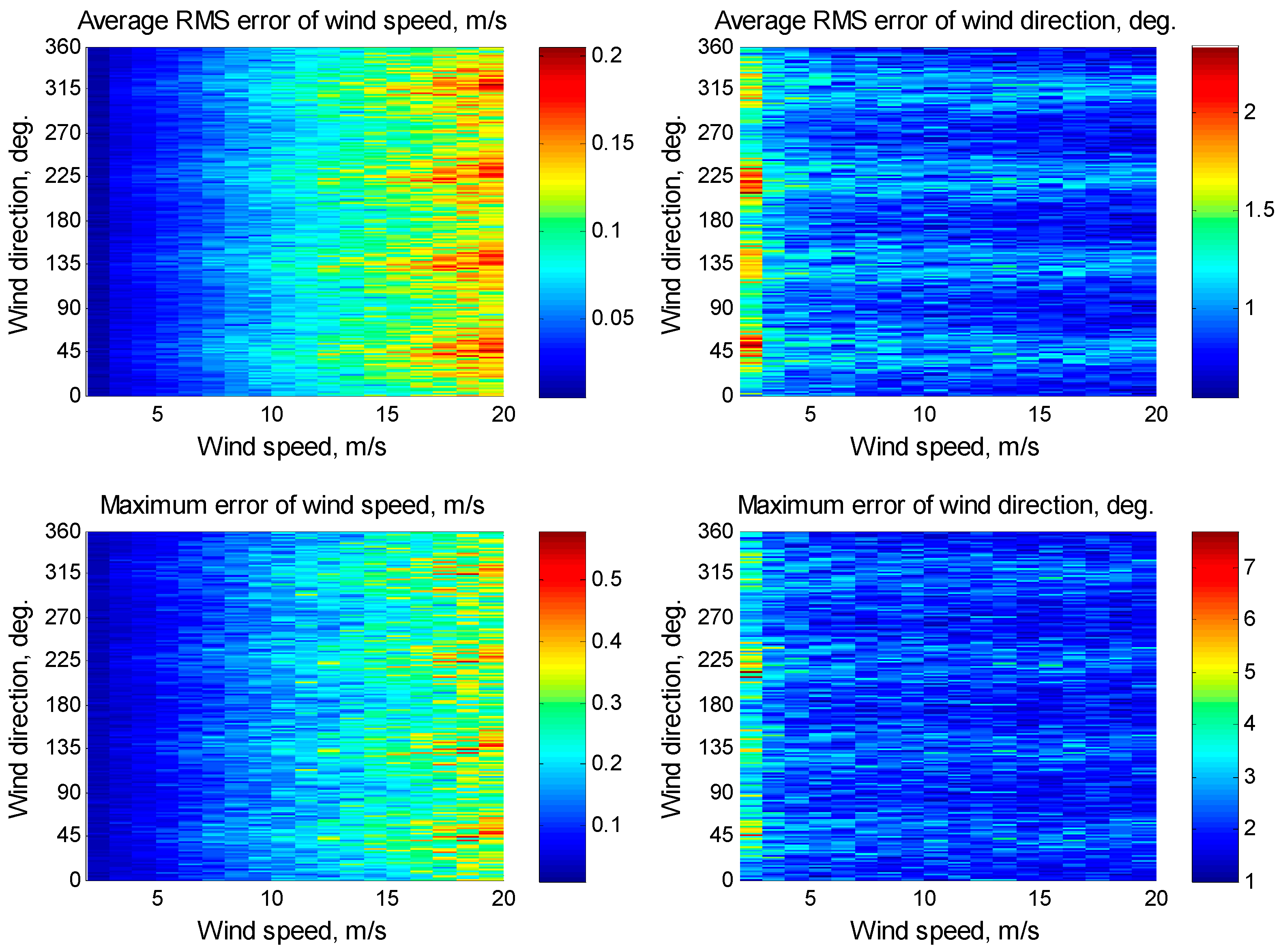
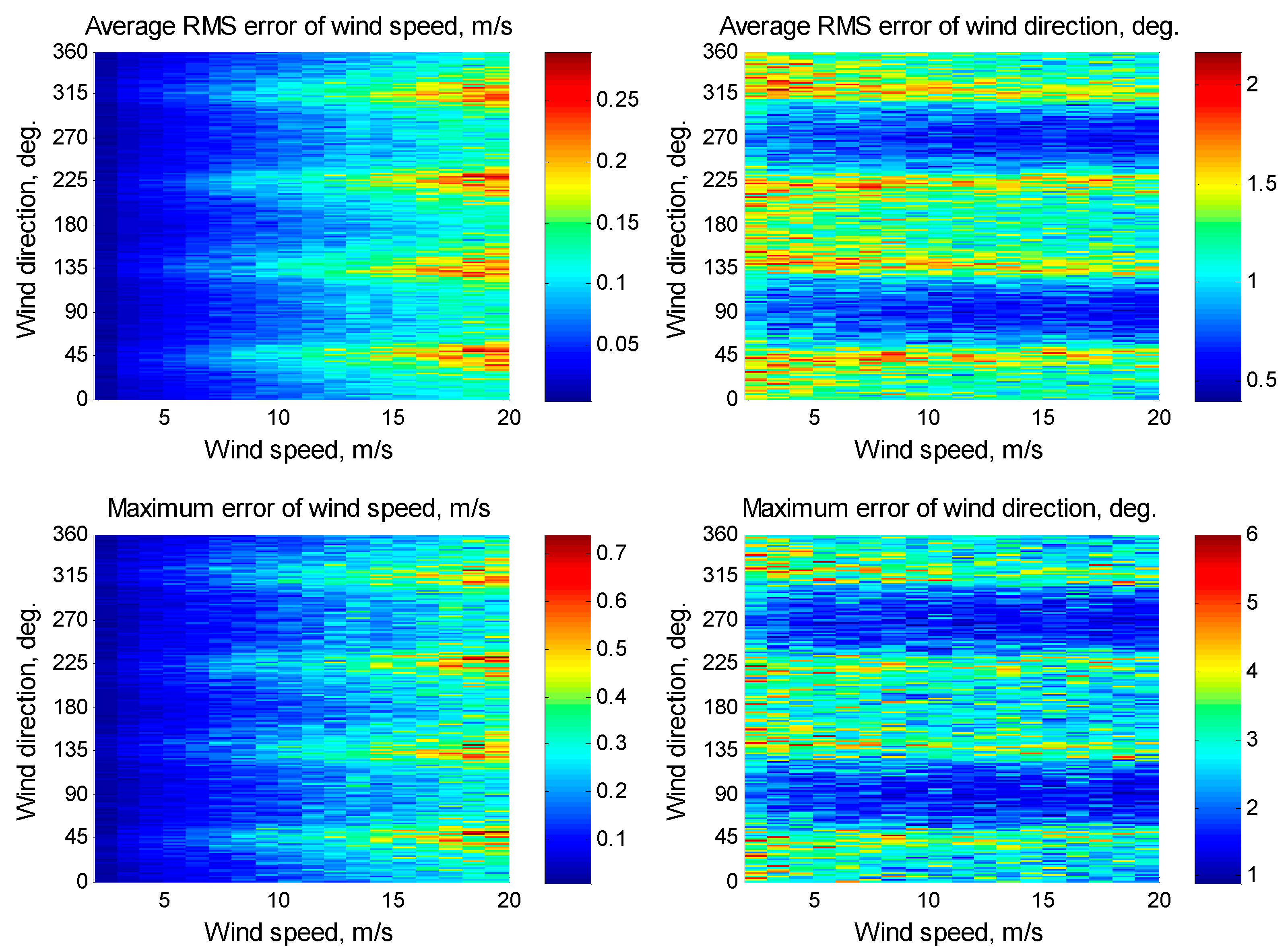
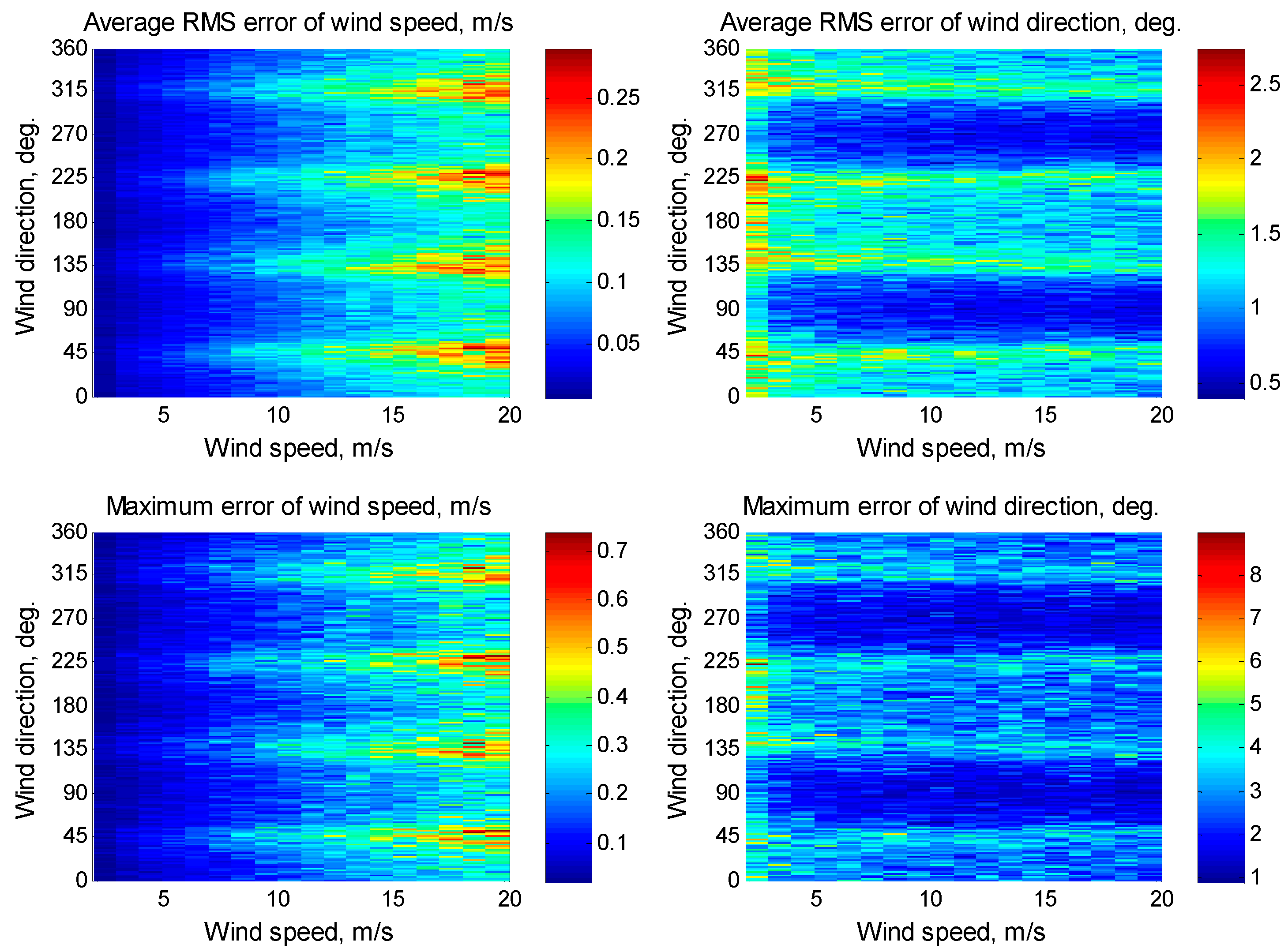
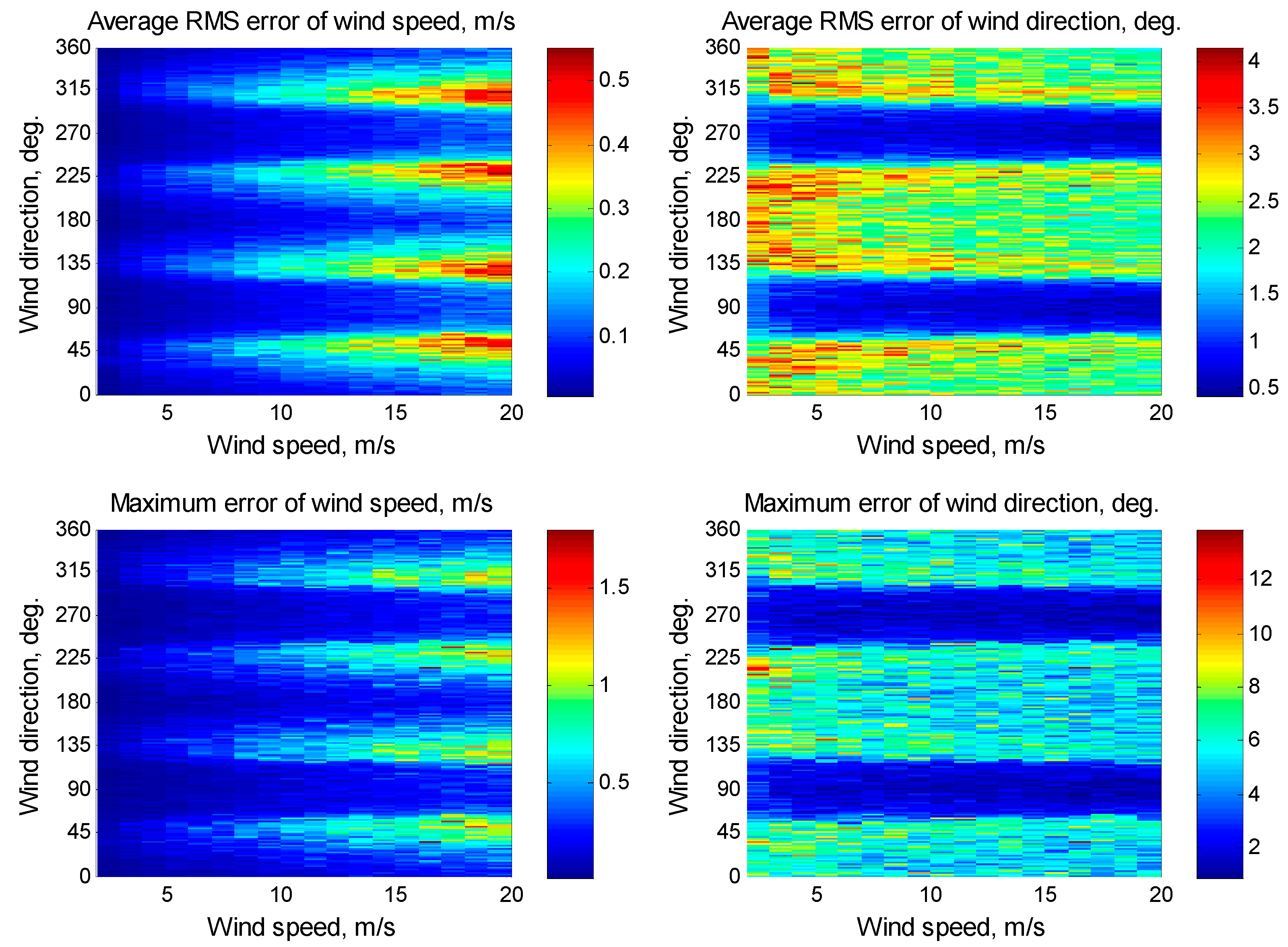
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DNS | Doppler navigation system |
| NRCS | normalized radar cross section |
References
- Collinson, R.P.G. Introduction to Avionics Systems; Springer: Dordrecht, The Netherlands, 2011; p. 547. [Google Scholar]
- Kayton, M.; Fried, W.R. Avionics Navigation Systems; John Wiley & Sons: New York, NY, USA, 1997; p. 773. [Google Scholar]
- Komen, G.J.; Cavaleri, L.; Donelan, M.; Hasselmann, K.; Hasselmann, S.; Janssen, P.A.E.M. Dynamics and Modelling of Ocean Waves; Cambridge University Press: Cambridge, UK, 1994; p. 532. [Google Scholar]
- Moore, R.K.; Fung, A.K. Radar determination of winds at sea. Proc. IEEE 1979, 67, 1504–1521. [Google Scholar] [CrossRef]
- Chelton, D.B.; McCabe, P.J. A review of satellite altimeter measurement of sea surface wind speed: With a proposed new algorithm. J. Geophys. Res. 1985, 90, 4707–4720. [Google Scholar] [CrossRef]
- Feindt, F.; Wismann, V.; Alpers, W.; Keller, W.C. Airborne measurements of the ocean radar cross section at 5.3 GHz as a function of wind speed. Radio Sci. 1986, 21, 845–856. [Google Scholar] [CrossRef]
- Masuko, H.; Okamoto, K.; Shimada, M.; Niwa, S. Measurement of microwave backscattering signatures of the ocean surface using X band and Ka band airborne scatterometers. J. Geophys. Res. Oceans 1986, 91, 13065–13083. [Google Scholar] [CrossRef]
- Wismann, V. Messung der Windgeschwindigkeit über dem Meer mit einem flugzeuggetragenen 5.3 GHz Scatterometer. Ph.D. Thesis, Universität Bremen, Bremen, Germany, 1989; p. 119. [Google Scholar]
- Hildebrand, P.H. Estimation of sea-surface wind using backscatter cross-section measurements from airborne research weather radar. IEEE Trans. Geosci. Remote Sens. 1994, 32, 110–117. [Google Scholar] [CrossRef]
- Carswell, J.R.; Carson, S.C.; McIntosh, R.E.; Li, F.K.; Neumann, G.; McLaughlin, D.J.; Wilkerson, J.C.; Black, P.G.; Nghiem, S.V. Airborne scatterometers: Investigating ocean backscatter under low- and high-wind conditions. Proc. IEEE 1994, 82, 1835–1860. [Google Scholar] [CrossRef]
- Long, M.W. Radar Reflectivity of Land and Sea; Artech House: New York, NY, USA, 2001; p. 534. [Google Scholar]
- Plant, W.J. Microwave sea return at moderate to high incidence angles. Wave Random Media 2003, 13, 339–354. [Google Scholar] [CrossRef]
- Ward, K.D.; Tough, R.J.A.; Watts, S. Sea Clutter: Scattering, the K Distribution and Radar Performance; Institution of Engineering and Technology: London, UK, 2008; p. 450. [Google Scholar]
- Bentamy, A.; Grodsky, S.A.; Carton, J.A.; Croizé-Fillon, D.; Chapron, B. Matching ASCAT and QuikSCAT winds. J. Geophys. Res. 2012, 117, 1–15. [Google Scholar] [CrossRef]
- Nielsen, S.N.; Long, D.G. A wind and rain backscatter model derived from AMSR and SeaWinds data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1595–1606. [Google Scholar] [CrossRef]
- Ouchi, K. A theory on the distribution function of backscatter radar cross section from ocean waves of individual wavelength. IEEE Trans. Geosci. Remote Sens. 2000, 38, 811–822. [Google Scholar] [CrossRef]
- Long, D.G.; Donelan, M.A.; Freilich, M.H.; Graber, H.C.; Masuko, H.; Pierson, W.J.; Plant, W.J.; Weissman, D.; Wentz, F. Current Progress in Ku-Band Model Functions; Technical Report MERS 96-002; Brigham Young University Press: Provo, UT, USA, 1996; p. 88. [Google Scholar]
- Jones, W.L. Progress in scatterometer application. J. Oceanogr. 2002, 58, 121–136. [Google Scholar]
- Gairola, R.M.; Bushair, M.T.; Bhowmick, S.A. Geophysical model function for wind speed retrieval from SARAL-AltiKa. Mar. Geod. 2015, 38 (Suppl. 1). [Google Scholar] [CrossRef]
- Boisot, O.; Pioch, S.; Fatras, C.; Caulliez, G.; Bringer, A.; Borderies, P.; Lalaurie, J.-C.; Guérin, C.-A. Ka-band backscattering from water surface at small incidence: A wind-wave tank study. J. Geophys. Res. Oceans 2015, 120, 3261–3285. [Google Scholar] [CrossRef]
- Stoffelen, A. Scatterometry. Ph.D. Thesis, Utrecht University, Utrecht, The Netherlands, 1998; p. 209. [Google Scholar]
- Nghiem, S.V.; Li, F.K.; Neumann, G. The dependence of ocean backscatter at Ku-band on oceanic and atmospheric parameters. IEEE Trans. Geosci. Remote Sens. 1997, 35, 581–600. [Google Scholar] [CrossRef]
- Yueh, S.H.; Tang, W.; Fore, A.G.; Neumann, G.; Hayashi, A.; Freedman, A.; Chaubell, J.; Lagerloef, G.S.E. L-Band passive and active microwave geophysical model functions of ocean surface winds and applications to Aquarius retrieval. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4619–4632. [Google Scholar] [CrossRef]
- Mapelli, D.; Pierdicca, N.; Guerriero, L.; Ferrazzoli, P.; Calleja, E.; Rommen, B.; Giudici, D.; Monti Guarnieri, A. A comparative study of RADAR Ka-band backscatter. In Proceedings of the SPIE 9243, SAR Image Analysis, Modeling, and Techniques XIV, 92430U, Amsterdam, The Netherlands, 21 October 2014; p. 13. [Google Scholar]
- Karaev, V.; Panfilova, M.; Jie, G. Influence of the type of sea waves on the backscattered radar cross section at medium incidence angles. Izv. Atmos. Ocean Phys. 2016, 52, 904–910. [Google Scholar] [CrossRef]
- Yurovsky, Y.Y.; Kudryavtsev, V.N.; Grodsky, S.A.; Chapron, B. Ka-Band dual copolarized empirical model for the sea surface radar cross section. IEEE Trans. Geosci. Remote Sens. 2017, 55, 143–148. [Google Scholar] [CrossRef]
- Moore, R.K.; Jones, W.L. Satellite scatterometer wind vector measurements—The legacy of the Seasat satellite scatterometer. IEEE Geosci. Remote Sens. Newsl. 2004, 132, 18–32. [Google Scholar]
- Nekrasov, A.; Khachaturian, A.; Veremyev, V.; Bogachev, M. Sea surface wind measurement by airborne weather radar scanning in a wide-size sector. Atmosphere 2016, 7. [Google Scholar] [CrossRef]
- Nekrasov, A.; Dell’Acqua, F. Theoretical approach for water-surface backscattering and wind measurements with airborne weather radar. IEEE Geosci. Remote Sens. Mag. 2016, 4, 38–50. [Google Scholar] [CrossRef]
- Sosnovsky, A.A.; Khaymovich, I.A. Radio-Electronic Equipment of Flying Apparatuses; Transport: Moscow, Union of Soviet Socialist Republics, 1987; p. 256. (In Russian)
- Fried, W.R. History of Doppler radar navigation. Navig. J. Inst. Navig. 1993, 40, 121–136. [Google Scholar] [CrossRef]
- Nagaraja, N.S. Elements of Electronic Navigation; Tata McGraw-Hill Publishing Company Ltd.: New Delhi, India, 2009; p. 183. [Google Scholar]
- Tooley, M.; Wyatt, D. Aircraft Communication and Navigation Systems: Principles Maintenance and Operation; Routledge: New York, NY, USA, 2011; p. 316. [Google Scholar]
- Kolchinskiy, V.Y.; Mandurovskiy, I.A.; Konstantinovskiy, M.I. Autonomous Doppler facilities and systems for Navigation of Flying Apparatus; Sovetskoye Radio: Moscow, Union of Soviet Socialist Republics, 1975; p. 432. (In Russian)
- Nekrassov, A. On airborne measurement of the sea surface wind vector by a scatterometer (altimeter) with a nadir-looking wide-beam antenna. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2111–2116. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Pasive, Volume II: Radar Remote Sensing and Surface Scattering and Emission Theory; Addison-Wesley: London, UK, 1982; p. 1064. [Google Scholar]
- Nekrasov, A. Measuring the sea surface wind vector by the Doppler navigation system of flying apparatus having the track-stabilized four-beam antenna. In Proceedings of the 17th Asia Pacific Microwave Conference (APMC), Suzhou, China, 4–7 December 2005; Volume 1, pp. 645–647. [Google Scholar]
- Lv, A.L.; Wang, X.N.; Jin, A.X.; Liu, L.X. Calibration/validation of spaceborne microwave scatterometer on HY-2A. In Proceedings of the International Geoscience and Remote Sensing Symposium IGARSS 2014 and 35th Canadian Symposium on Remote Sensing CSRS 2014, Quebec City, QC, Canada, 13–18 July 2014; pp. 692–694. [Google Scholar]



© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nekrasov, A.; Khachaturian, A.; Gamcová, M.; Kurdel, P.; Obukhovets, V.; Veremyev, V.; Bogachev, M. Sea Wind Measurement by Doppler Navigation System with X-Configured Beams in Rectilinear Flight. Remote Sens. 2017, 9, 887. https://doi.org/10.3390/rs9090887
Nekrasov A, Khachaturian A, Gamcová M, Kurdel P, Obukhovets V, Veremyev V, Bogachev M. Sea Wind Measurement by Doppler Navigation System with X-Configured Beams in Rectilinear Flight. Remote Sensing. 2017; 9(9):887. https://doi.org/10.3390/rs9090887
Chicago/Turabian StyleNekrasov, Alexey, Alena Khachaturian, Mária Gamcová, Pavol Kurdel, Viktor Obukhovets, Vladimir Veremyev, and Mikhail Bogachev. 2017. "Sea Wind Measurement by Doppler Navigation System with X-Configured Beams in Rectilinear Flight" Remote Sensing 9, no. 9: 887. https://doi.org/10.3390/rs9090887
APA StyleNekrasov, A., Khachaturian, A., Gamcová, M., Kurdel, P., Obukhovets, V., Veremyev, V., & Bogachev, M. (2017). Sea Wind Measurement by Doppler Navigation System with X-Configured Beams in Rectilinear Flight. Remote Sensing, 9(9), 887. https://doi.org/10.3390/rs9090887