Low-Altitude Aerial Methane Concentration Mapping



Abstract

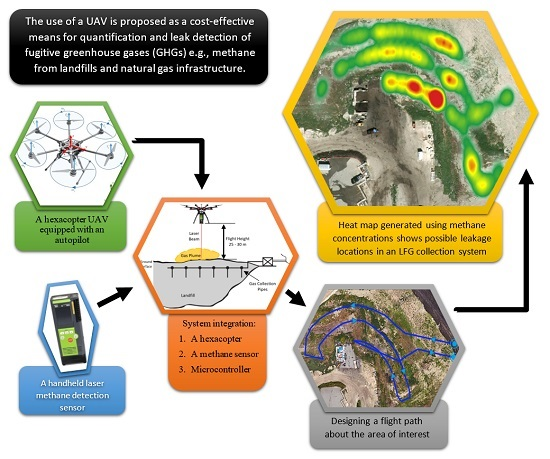
1. Introduction
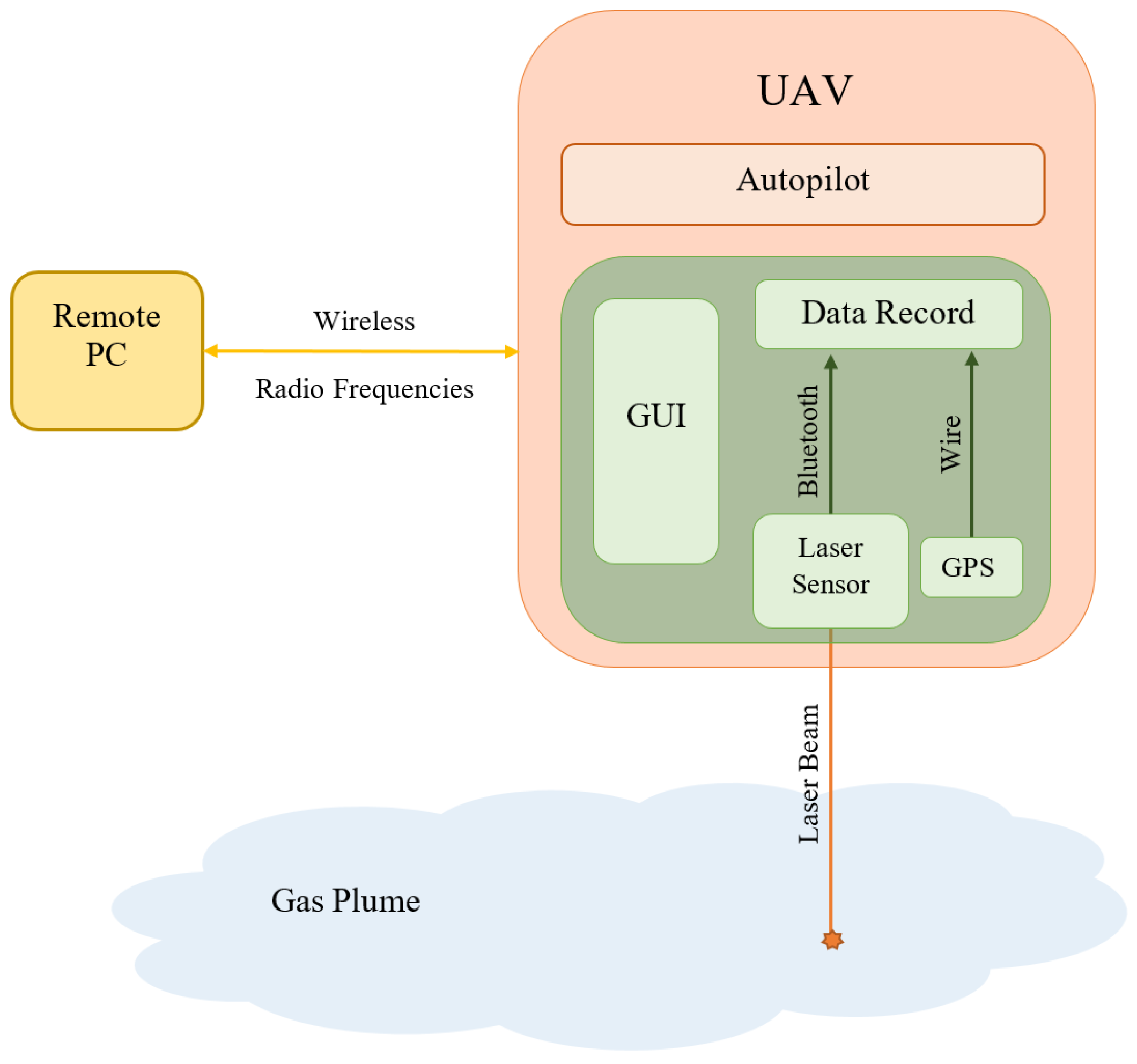
2. System Integration
2.1. UAV System
2.2. Methane Detector
2.3. On-Board Microprocessor
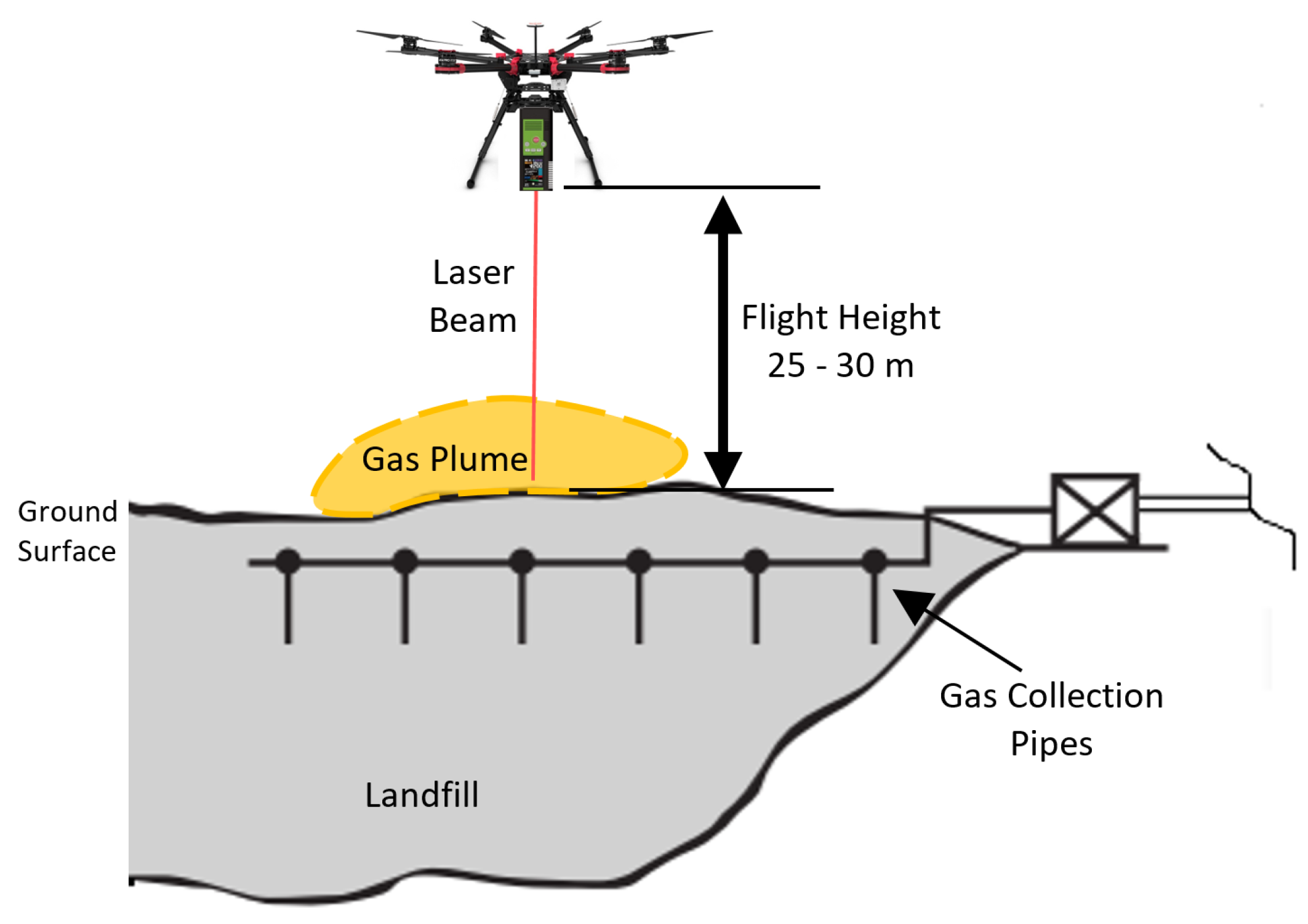
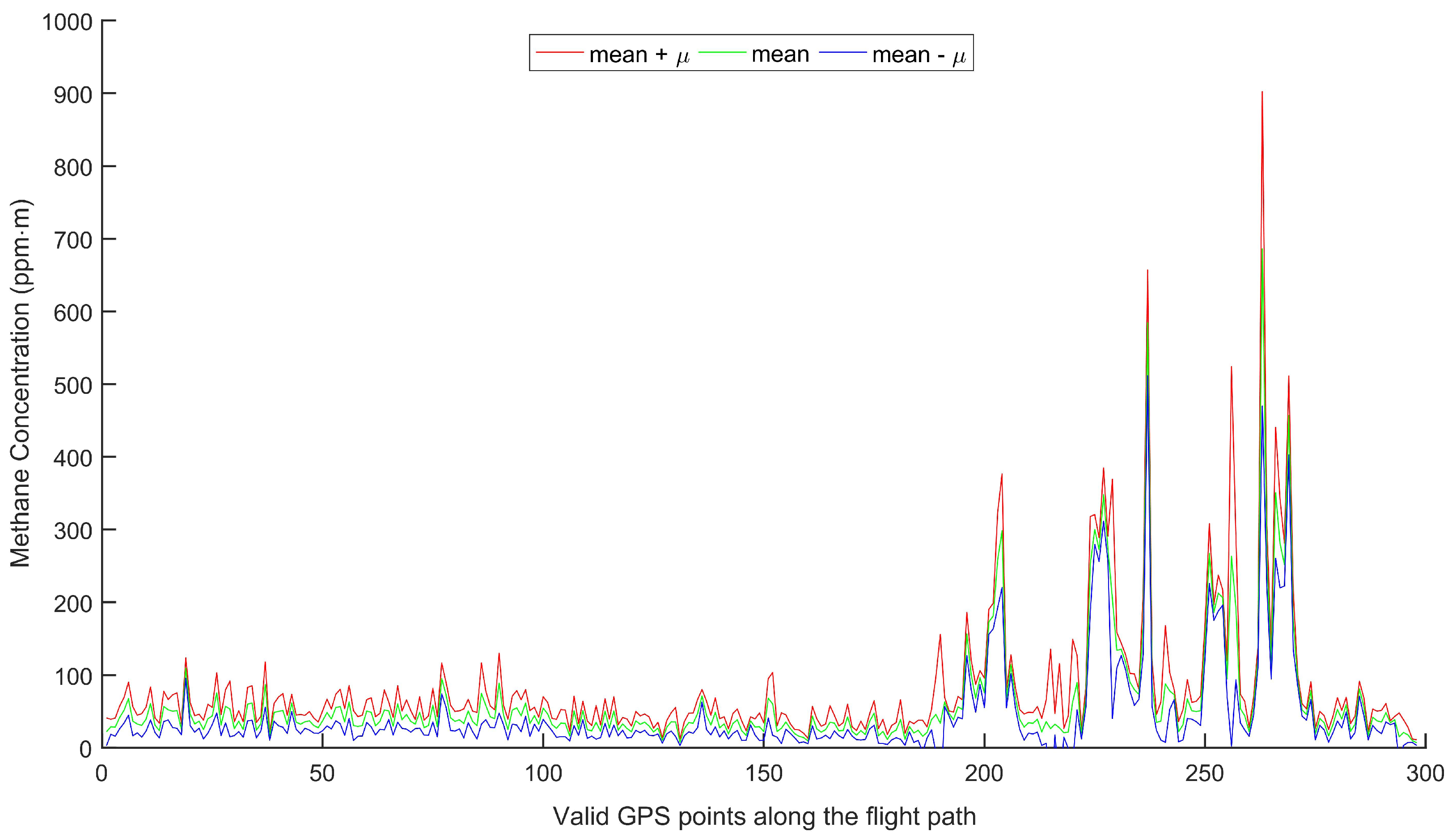
3. Field Test at a Landfill
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Allen, G.; Gallagher, M.; Hollingsworth, P.; Illingworth, S.; Kabbabe, K.; Percival, C. Feasibility of Aerial Measurements of Methane Emissions from Landfills; Technical Report; Environmental Agency: Rotherham, UK, 2014. [Google Scholar]
- Konersmann, R.; Kühl, C.; Jörg, L. On the Risks of Transporting Liquid and Gaseous Fuels in Pipelines; Technical Report; BAM Federal Institute for Materials Research and Testing: Berlin, Germany, 2009. [Google Scholar]
- Woelk, M. The Future of Natural Gas Leak Detection. Available online: http://www.oilgasmonitor.com/the-future-of-natural-gas-leak-detection/5400/ (accessed on 26 July 2017).
- Peischl, J.; Ryerson, T.B.; Brioude, J.; Aikin, K.C.; Andrews, A.E.; Atlas, E.; Blake, D.; Daube, B.C.; De Gouw, J.A.; Dlugokencky, E.; et al. Quantifying sources of methane using light alkanes in the Los Angeles basin, California. J. Geophys. Res. Atmos. 2013, 118, 4974–4990. [Google Scholar] [CrossRef]
- Murvay, P.S.; Silea, I. A survey on gas leak detection and localization techniques. J. Loss Prev. Process Ind. 2012, 25, 966–973. [Google Scholar] [CrossRef]
- Batzias, F.A.; Siontorou, C.G.; Spanidis, P.M.P. Designing a reliable leak bio-detection system for natural gas pipelines. J. Hazard. Mater. 2011, 186, 35–58. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.B.; Qin, X.Y.; Wang, Z.h.; Liang, W. Designing a reliable leak detection system for West Products Pipeline. J. Loss Prev. Process Ind. 2009, 22, 981–989. [Google Scholar] [CrossRef]
- Scott, S.; Barrufet, M. Worldwide Assessment of Industry Leak Detection Capabilities for Single & Multiphase Pipelines; Technical Report; Department of Petroleum Engineering, Texas A&M University: Austin, TX, USA, 2003. [Google Scholar]
- Zhang, X. Statistical leak detection in gas and liquid pipelines. Pipes Pipelines Int. 1993, 38, 26–29. [Google Scholar]
- Quaife, L.; Acker, D. Pipeline leak location technique using a novel test fluid and trained dogs. In Proceedings of the Pipeline Pigging and Integrity Monitoring Conference, Houston, TX, USA, 1–4 February 1993. [Google Scholar]
- Liu, J.; Yao, J.; Gallaher, M.; Coburn, J.; Fernandez, R. Study on Methane Emission Reduction Potential in China’s Oil and Natural Gas Industry; Technical Report; Research Triangle Park: North Carolina, NC, USA, 2008. [Google Scholar]
- Minato, A.; Joarder, M.M.A.; Ozawa, S.; Kadoya, M.; Sugimoto, N. Development of a lidar system for measuring methane using a gas correlation method. Jpn. J. Appl. Phys. 1999, 38, 3610–3613. [Google Scholar] [CrossRef]
- Lowry, W.; Dunn, S.; Walsh, R.; Merewether, D.; Rao, D. Method and System to Locate Leaks in Subsurface Containment Structures Using Tracer Gases; Technical Report; Science & Engineering Associates, Inc.: Albuquerque, NM, USA, 2009. [Google Scholar]
- Sperl, J. System pinpoints leaks on Point Arguello offshore line. Oil Gas J. 1991, 89, 47–52. [Google Scholar]
- Bloom, D. Non-intrusive system detects leaks using mass measurement. Pipeline Gas J. 2004, 231, 20–21. [Google Scholar]
- Rougier, J. Probabilistic leak detection in pipelines using the mass imbalance approach. J. Hydraul. Res. 2005, 43, 556–566. [Google Scholar] [CrossRef]
- Liou, J. Leak detection by mass balance effective for Norman wells line. Oil Gas J. 1996, 94, 69–75. [Google Scholar]
- Hauge, E.; Aamo, O.M.; Godhavn, J.M. Model-based monitoring and leak detection in oil and gas pipelines. SPE Proj. Facil. Constr. 2009, 4, 53–60. [Google Scholar] [CrossRef]
- Verde, C.; Visairo, N. Bank of nonlinear observers for the detection of multiple leaks in a pipeline. In Proceedings of the 2001 IEEE International Conference on Control Applications, Mexico, 5–7 September 2001; pp. 714–719. [Google Scholar]
- El-Shiekh, T.M. Leak detection methods in transmission pipelines. Energy Sources 2010, 32, 715–726. [Google Scholar] [CrossRef]
- Souza de Joode, A.; Hoffman, A. Pipeline leak detection and theft detection using rarefaction waves. In Proceedings of the 6th Pipeline Technology Conference, Hannover, Germany, 4–5 April 2011. [Google Scholar]
- Farmer, E.J. Long-term field tests completed on pipe leak detector program. Offsh. Inc. Oilman 1991, 51, 86–90. [Google Scholar]
- Bergamaschi, P.; Frankenberg, C.; Meirink, J.F.; Krol, M.; Villani, M.G.; Houweling, S.; Dentener, F.; Dlugokencky, E.J.; Miller, J.B.; Gatti, L.V.; et al. Inverse modeling of global and regional CH 4 emissions using SCIAMACHY satellite retrievals. J. Geophys. Res. 2009, 114. [Google Scholar] [CrossRef]
- Gentry, S.; Walsh, P. The influence of high methane concentrations on the stability of catalytic flammable-gas sensing elements. Sens. Actuators 1984, 5, 229–238. [Google Scholar] [CrossRef]
- Kim, S.; Lee, D.W.; Lee, J.Y.; Eom, H.J.; Lee, H.J.; Cho, I.H.; Lee, K.Y. Catalytic combustion of methane in simulated PSA offgas over Mn-substituted La–Sr-hexaaluminate (La_xSr_1-x, MnAl_11O_19). J. Mol. Catal. A 2011, 335, 60–64. [Google Scholar] [CrossRef]
- Shin, W.; Imai, K.; Izu, N.; Murayama, N. Thermoelectric thick-film hydrogen gas sensor operating at room temperature. Jpn. J. Appl. Phys. 2001, 40, L1232–L1234. [Google Scholar] [CrossRef]
- Alarcon, M.; Ito, H.; Inaba, H. All-optical remote sensing of city gas through CH 4 gas absorption employing a low-loss optical fiber link and an InGaAsP light-emitting diode in the near-infrared region. Appl. Phys. B 1987, 43, 79–83. [Google Scholar] [CrossRef]
- Noda, K.; Takahashi, M.; Ohba, R.; Kakuma, S. Measurement of methane gas concentration by detecting absorption at 1300 nm using a laser diode wavelength-sweep technique. Opt. Eng. 2005, 44, 014301–014306. [Google Scholar]
- Mahony, R.; Kumar, V.; Corke, P. Multirotor aerial vehicles: Modeling, estimation, and control of quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 20–32. [Google Scholar] [CrossRef]
- Hua, M.D.; Hamel, T.; Morin, P.; Samson, C. Introduction to feedback control of underactuated VTOLvehicles: A review of basic control design ideas and principles. IEEE Control Syst. 2013, 33, 61–75. [Google Scholar]
- Hausamann, D.; Zirnig, W.; Schreier, G.; Strobl, P.; Hausamann, D.; Zirnig, W. Monitoring of gas pipelines—A civil UAV application. Aircr. Eng. Aerosp. Technol. 2005, 77, 352–360. [Google Scholar] [CrossRef]
- Krishnamurthy, K. Alaska Uses Drones to Inspect Oil and Gas Pipelines at a Fraction Of the Cost. Available online: http://www.rawstory.com/2013/06/alaska-uses-drones-to-inspect-oil-and-gas-pipelines-at-a-fraction-of-the-cost/ (accessed on 26 July 2017).
- Frish, M.B.; Wainner, R.T.; Laderer, M.C.; Allen, M.G.; Rutherford, J.; Wehnert, P.; Dey, S.; Gilchrist, J.; Corbi, R.; Picciaia, D.; et al. Low-cost lightweight airborne laser-based sensors for pipeline leak detection and reporting. Proc. SPIE 2013, 8726, 87260–87269. [Google Scholar]
- Banica, A.; Kohn, J.; Tolton, B. RealSens airborne pipeline leak detection field operations results. In Proceedings of the Pipeline Technology Conference, Hannover Congress Centrum, Hannover, Germany, 18–20 March 2013; pp. 2–11. [Google Scholar]
- Tratt, D.M.; Buckland, K.N.; Hall, J.L.; Johnson, P.D.; Keim, E.R.; Leifer, I.; Westberg, K.; Young, S.J. Airborne visualization and quantification of discrete methane sources in the environment. Remote Sens. Environ. 2014, 154, 74–88. [Google Scholar] [CrossRef]
- Bretschneider, T.R.; Shetti, K. Uav-Based Gas Pipeline Leak Detection. Available online: https://www.researchgate.net/profile/Timo_Bretschneider/publication/275035983_UAV-based_gas_pipeline_leak_detection/links/553068770cf20ea0a06f7ea1.pdf (accessed on 26 July 2017).
- Lehmann, J.R.; Münchberger, W.; Knoth, C.; Blodau, C.; Nieberding, F.; Prinz, T.; Pancotto, V.A.; Kleinebecker, T. High-Resolution Classification of South Patagonian Peat Bog Microforms Reveals Potential Gaps in Up-Scaled CH4 Fluxes by use of Unmanned Aerial System (UAS) and CIR Imagery. Remote Sens. 2016, 8, 173. [Google Scholar] [CrossRef]
- Khan, A.; Schaefer, D.; Tao, L.; Miller, D.J.; Sun, K.; Zondlo, M.A.; Harrison, W.A.; Roscoe, B.; Lary, D.J. Low power greenhouse gas sensors for unmanned aerial vehicles. Remote Sens. 2012, 4, 1355–1368. [Google Scholar] [CrossRef]
- Alaimo, A.; Artale, V.; Milazzo, C.L.R.; Ricciardello, A. PID controller applied to hexacopter flight. J. Intell. Robot. Syst. 2014, 73, 261–270. [Google Scholar] [CrossRef]
- Omari, S.; Hua, M.D.; Ducard, G.; Hamel, T. Hardware and software architecture for nonlinear control of multirotor helicopters. IEEE/ASME Trans. Mechatron. 2013, 18, 1724–1736. [Google Scholar] [CrossRef]
- Heath, M.W. Leak Detection Practices & Demonstration of Optical Imaging; Technical Report; Global Methane Initiatve: Jakarta, Indonesia, 2011. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Based Category Example | Advantages | Disadvantages |
|---|---|---|---|
| Non-technical | Trained dogs [10] | Straightforward | Effectiveness and accuracy |
| affected by fatigue | |||
| Soap bubble screening [11] | Low-cost | Require accessibility | |
| Immediate localization | experience | ||
| Hardware-based | Optical methods [12] | High sensitivity | Expensive |
| Remote sensing | Short system lifetime | ||
| Soil monitoring [13] | Low false alarm rate | Expensive | |
| High sensitive | |||
| Vapor sampling [14] | Determine location and | Slow response time | |
| size of a leak | Applicable for pipelines | ||
| Ultrasonic flow meters [15] | Good accuracy | Difficulties in implementation | |
| Software based | Mass/volume balance [16,17] | Low-cost | Case false alarm |
| Easily installed | Depends on leak size | ||
| Real-time transient modeling [18,19] | Ability to detect small | Expensive - Requires | |
| leaks | extensive instrumentation | ||
| Negative pressure wave [20,21] | Accurate | Applicable for short pipelines | |
| Pressure point analysis [22] | Accurate | Works for static flow | |
| Works in harsh environments |
| Inspection using | Advantages | Disadvantages |
|---|---|---|
| Foot patrol | Low cost | Slow |
| Straightforward | Cover Small segments | |
| Land vehicle | Moderate speed | Require extra infrastructure |
| Cover large segments | ||
| Helicopter | Fast | Accessibility limited |
| Cover large segments | High cost and maintenance | |
| UAV | Low cost | Short flight duration |
| High accessibility | ||
| Cover large segments |
| Technical Specifications | |
| Type | EVO Arm F800-R hexacopter |
| Power | Two 11.1v lipo-batteries |
| Weight | 5 kg |
| Propeller | 15” Carbon Fiber |
| Dimension | 800 mm diagonally |
| On-board sensors | IMU, magnetometer, |
| GPS, telemetry, barometer | |
| System Features | |
| Payload | 2.8 kg |
| Flight speed | 2 m/s (through the test) |
| Flight endurance | 30 min |
| Flight Control | |
| Software | Mission planner software (APM) |
| Autopilot | PIXHAWK |
| Flight mode | Two modes: radio control and |
| autonomous (waypoint navigation) | |
| Item | Specifications |
|---|---|
| Weight | 530 g |
| Operating time | Approx. 5 h |
| Detection limits | 1 ∼ 50,000 ppm·m |
| Detection distance | 0.5 m ∼ 30 m |
| Laser output level | 10 mW (Class 1) |
| Accuracy of detection | ± 10 % |
| Operating temperature | −17 ∼ 50 °C |
| Measurement frequency | 10 Hz |
| Laser output wavelength | 1653 nm |
| Communication method | Bluetooth Ver.2.1 |
| Concentration Level | Concentration Range (ppm·m) | Color |
|---|---|---|
| Insignificant | < 25 | White |
| Low | 25–75 | Green |
| Medium | 75–150 | Yellow |
| High | >150 | Red |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Emran, B.J.; Tannant, D.D.; Najjaran, H. Low-Altitude Aerial Methane Concentration Mapping. Remote Sens. 2017, 9, 823. https://doi.org/10.3390/rs9080823
Emran BJ, Tannant DD, Najjaran H. Low-Altitude Aerial Methane Concentration Mapping. Remote Sensing. 2017; 9(8):823. https://doi.org/10.3390/rs9080823
Chicago/Turabian StyleEmran, Bara J., Dwayne D. Tannant, and Homayoun Najjaran. 2017. "Low-Altitude Aerial Methane Concentration Mapping" Remote Sensing 9, no. 8: 823. https://doi.org/10.3390/rs9080823
APA StyleEmran, B. J., Tannant, D. D., & Najjaran, H. (2017). Low-Altitude Aerial Methane Concentration Mapping. Remote Sensing, 9(8), 823. https://doi.org/10.3390/rs9080823