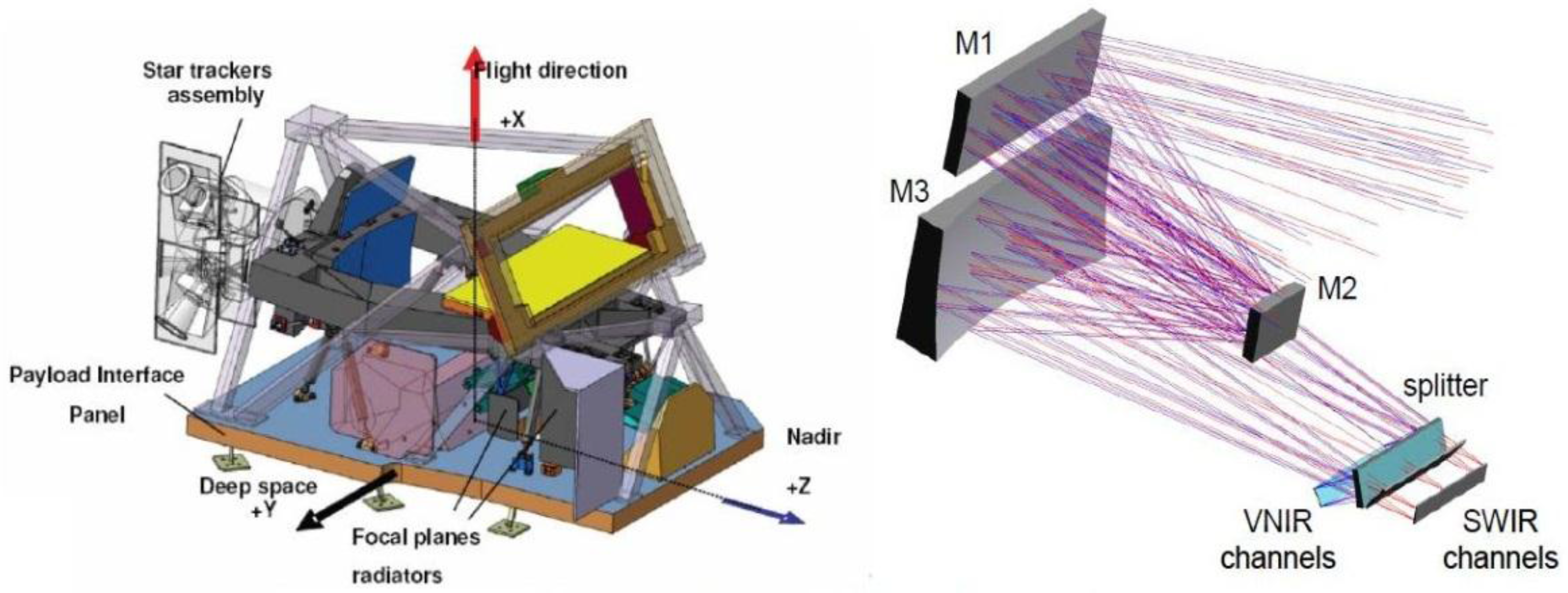
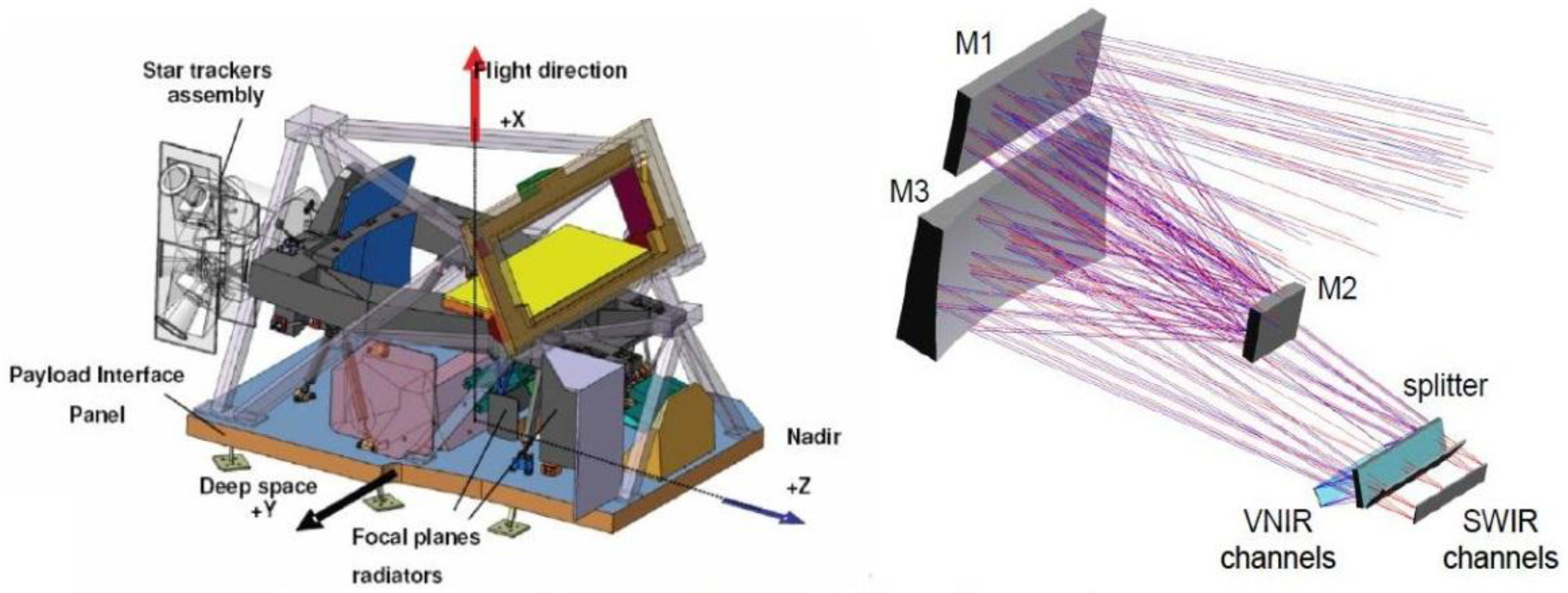
Figure 1.
Multi-Spectral Instrument (MSI) internal configuration.
Left: full instrument view (diffuser panel in yellow, telescope mirrors in dark blue).
Right: optical path construction to the Short-Wave Infrared (SWIR)/visible to near-infrared (VNIR) (see
Section 2.2) splitter and focal planes.
Figure 1.
Multi-Spectral Instrument (MSI) internal configuration.
Left: full instrument view (diffuser panel in yellow, telescope mirrors in dark blue).
Right: optical path construction to the Short-Wave Infrared (SWIR)/visible to near-infrared (VNIR) (see
Section 2.2) splitter and focal planes.
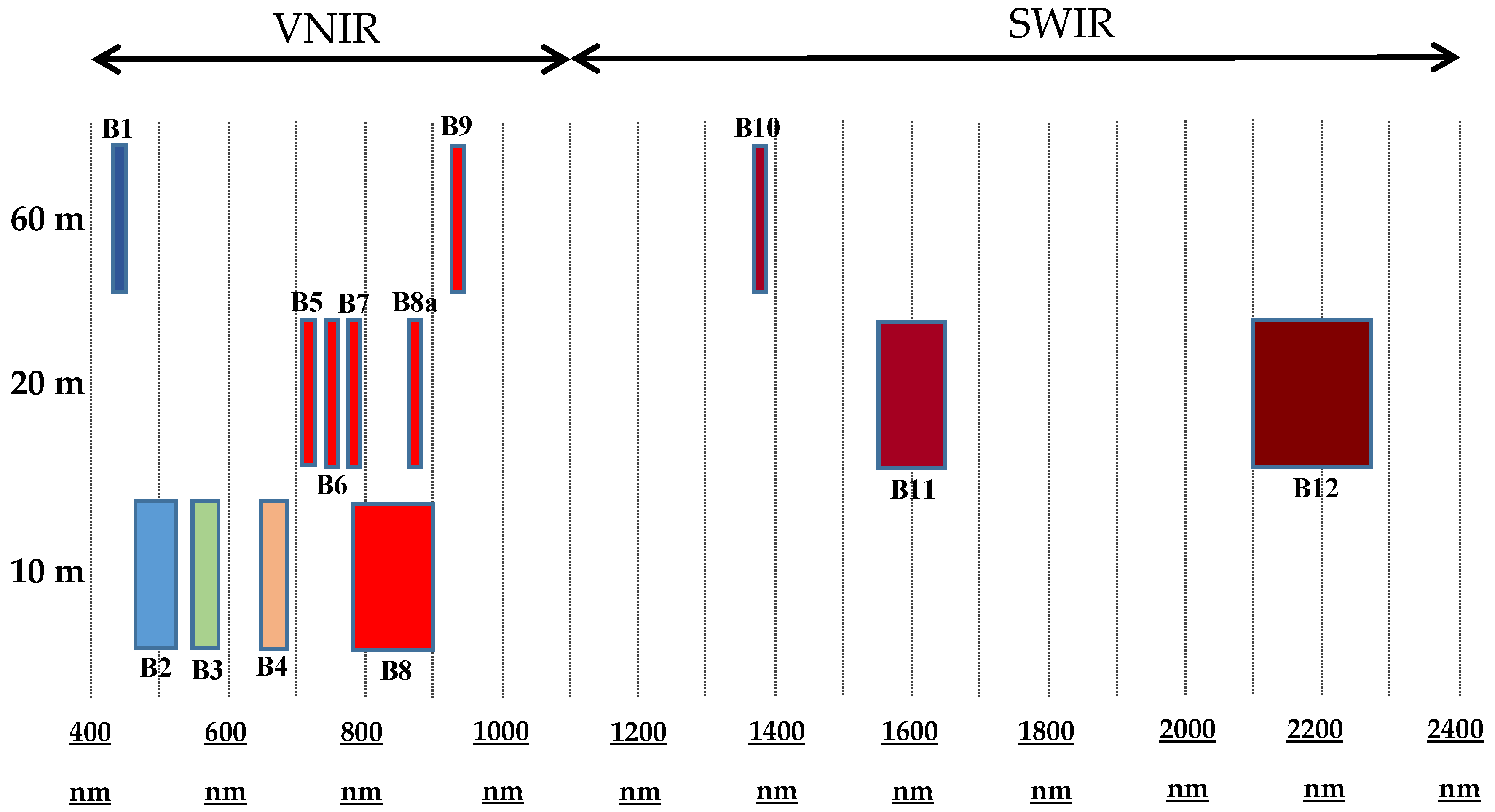
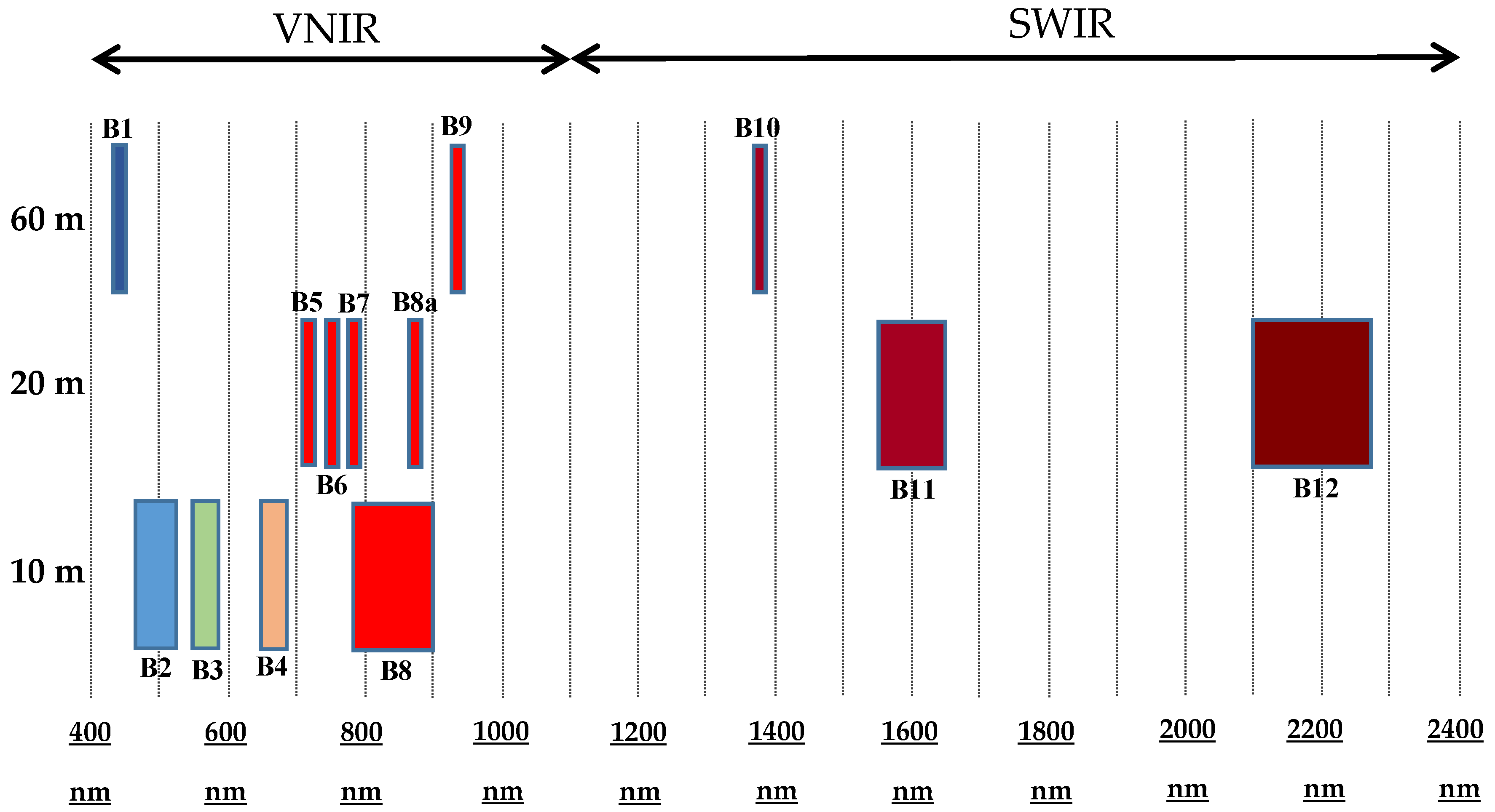
Figure 2.
MSI spectral bands vs. spatial resolution with corresponding Full Width at Half Maximum (FWHM).
Figure 2.
MSI spectral bands vs. spatial resolution with corresponding Full Width at Half Maximum (FWHM).
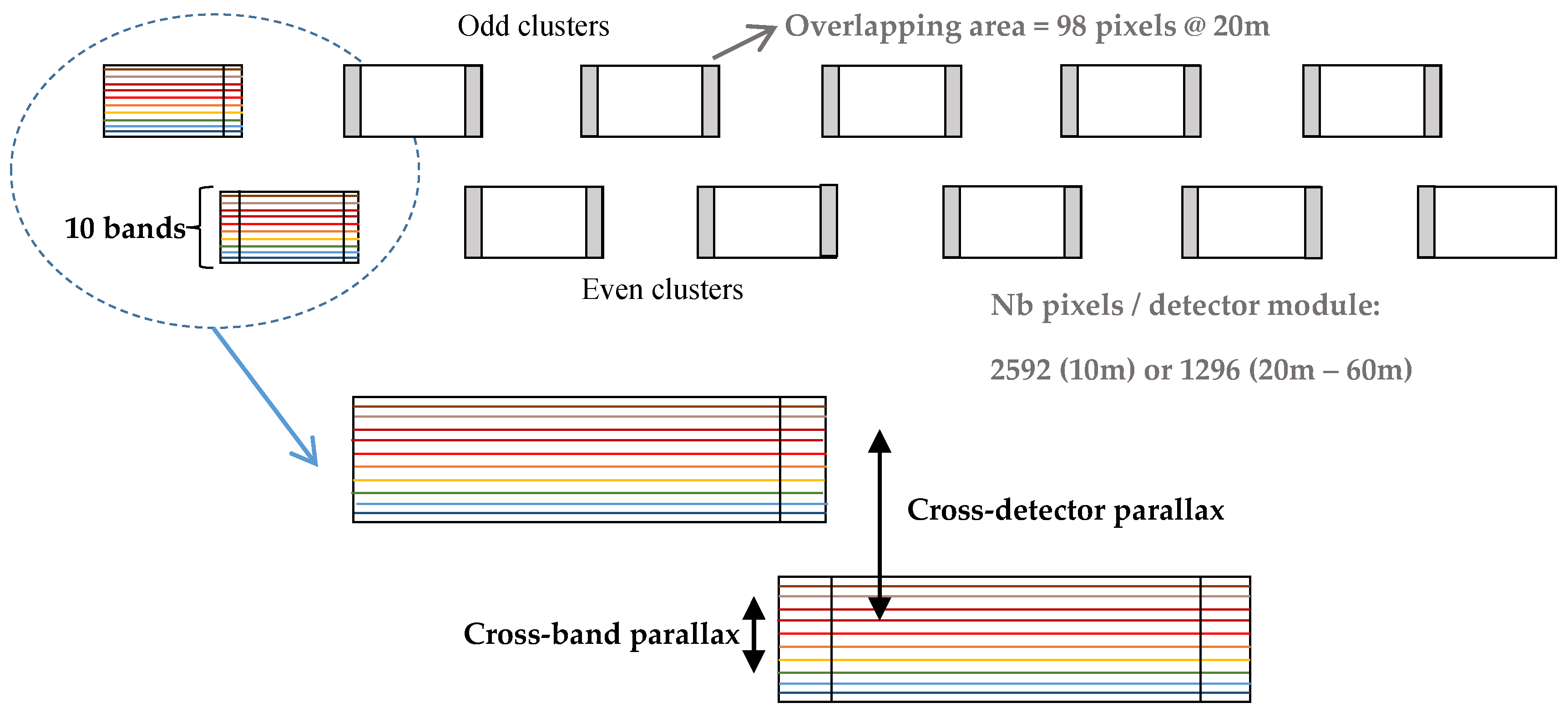
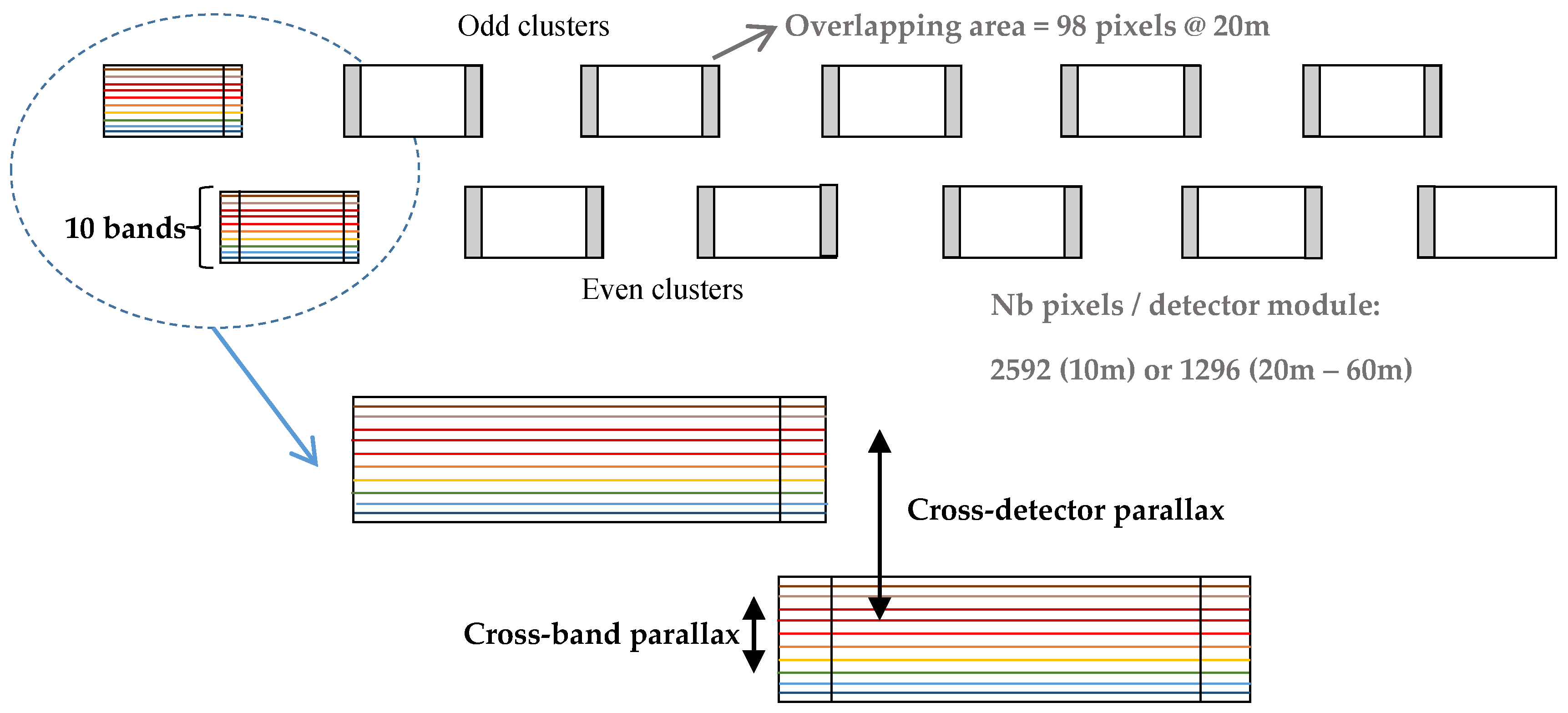
Figure 3.
Staggered Detector Configuration.
Figure 3.
Staggered Detector Configuration.
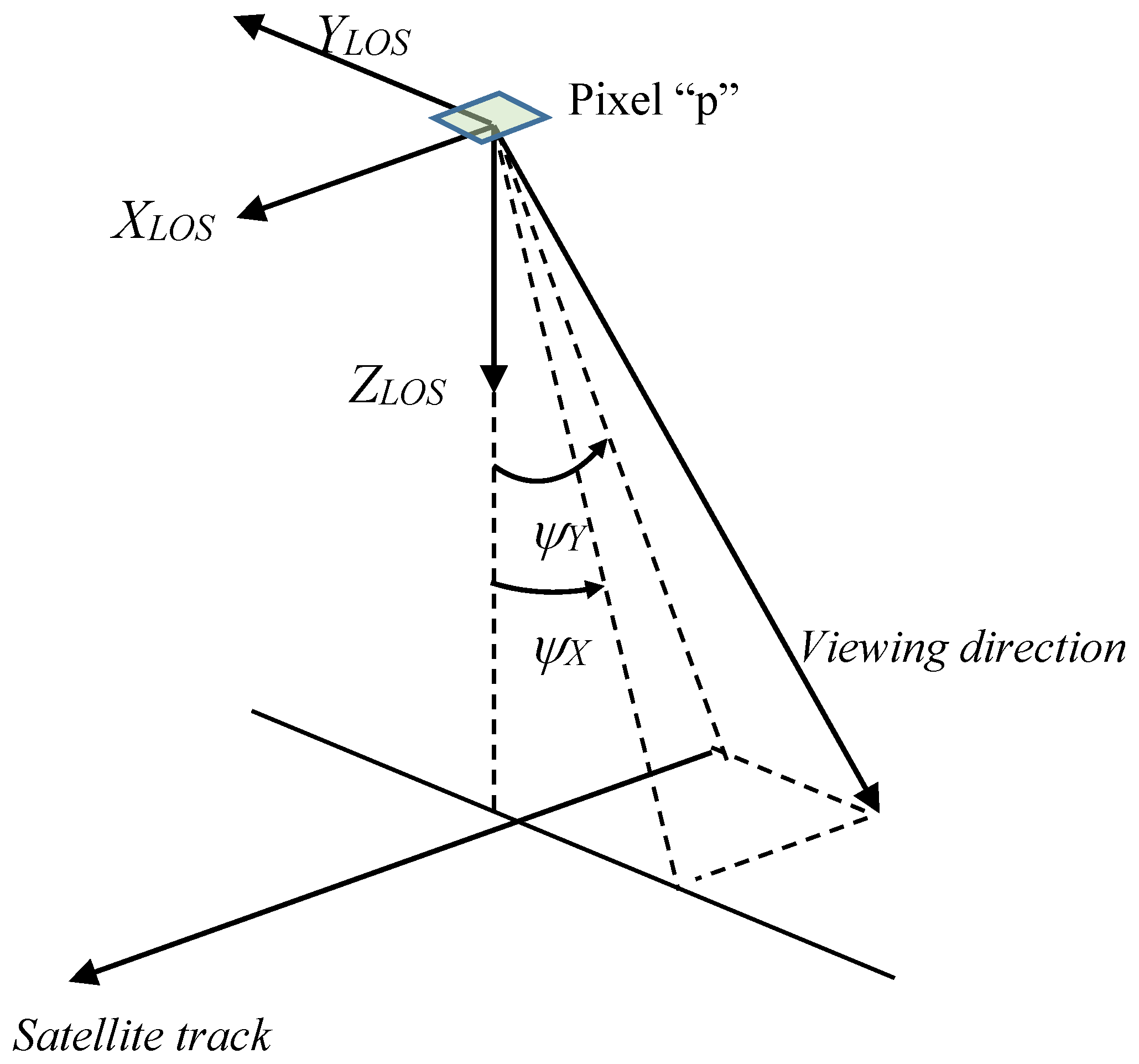
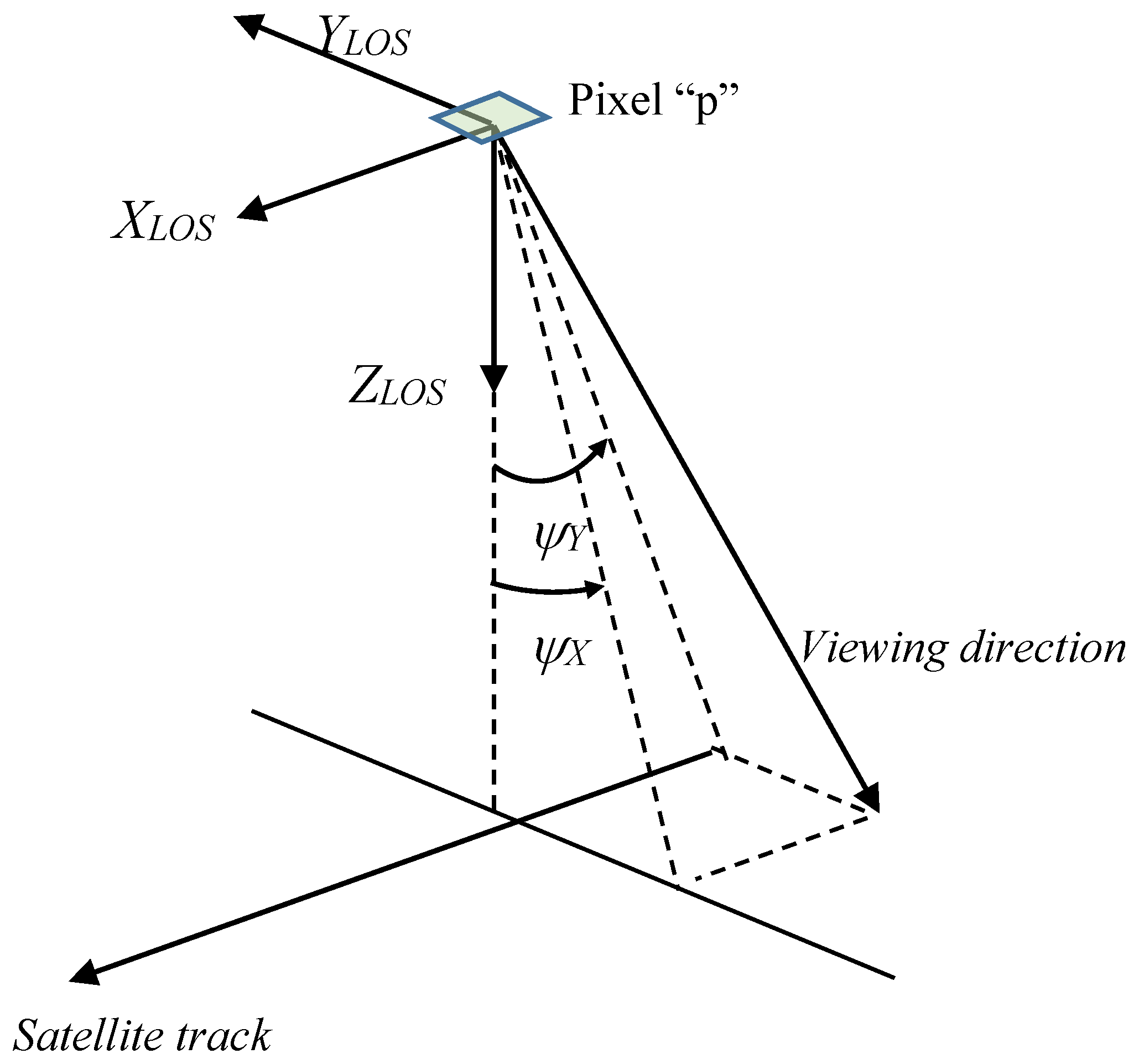
Figure 4.
Line of Sight angles definition.
Figure 4.
Line of Sight angles definition.
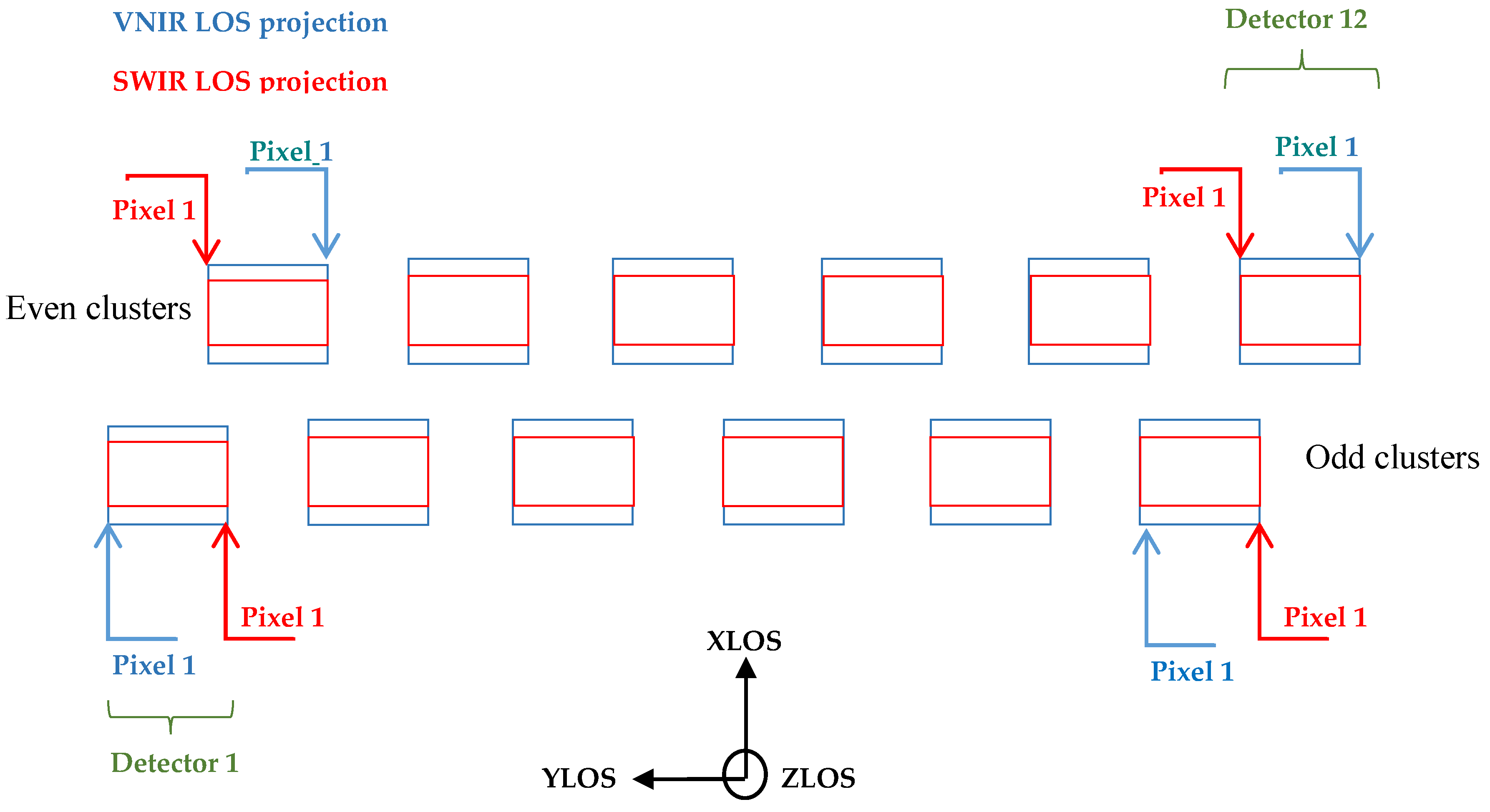
Figure 5.
Representation of the pixels Line-Of-Sight (LOS) projection on ground.
Figure 5.
Representation of the pixels Line-Of-Sight (LOS) projection on ground.
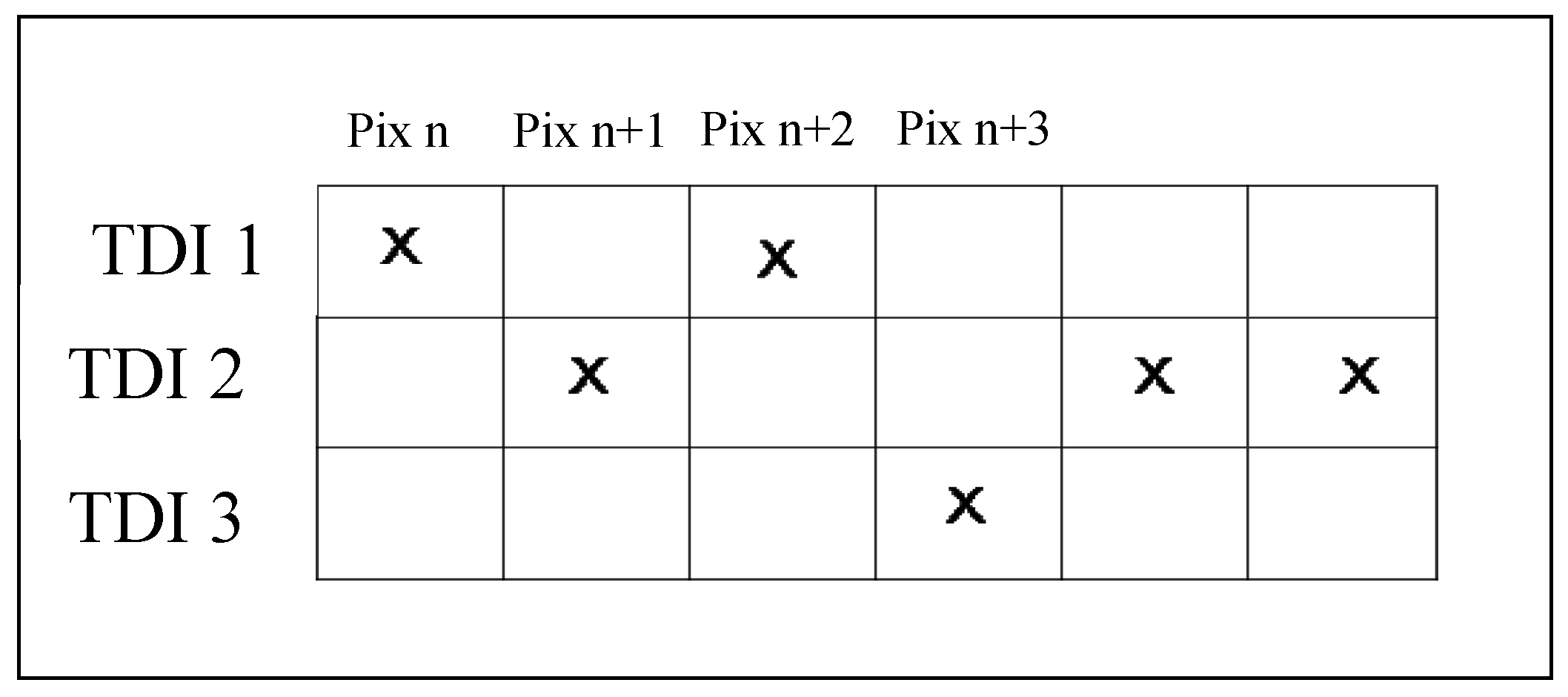
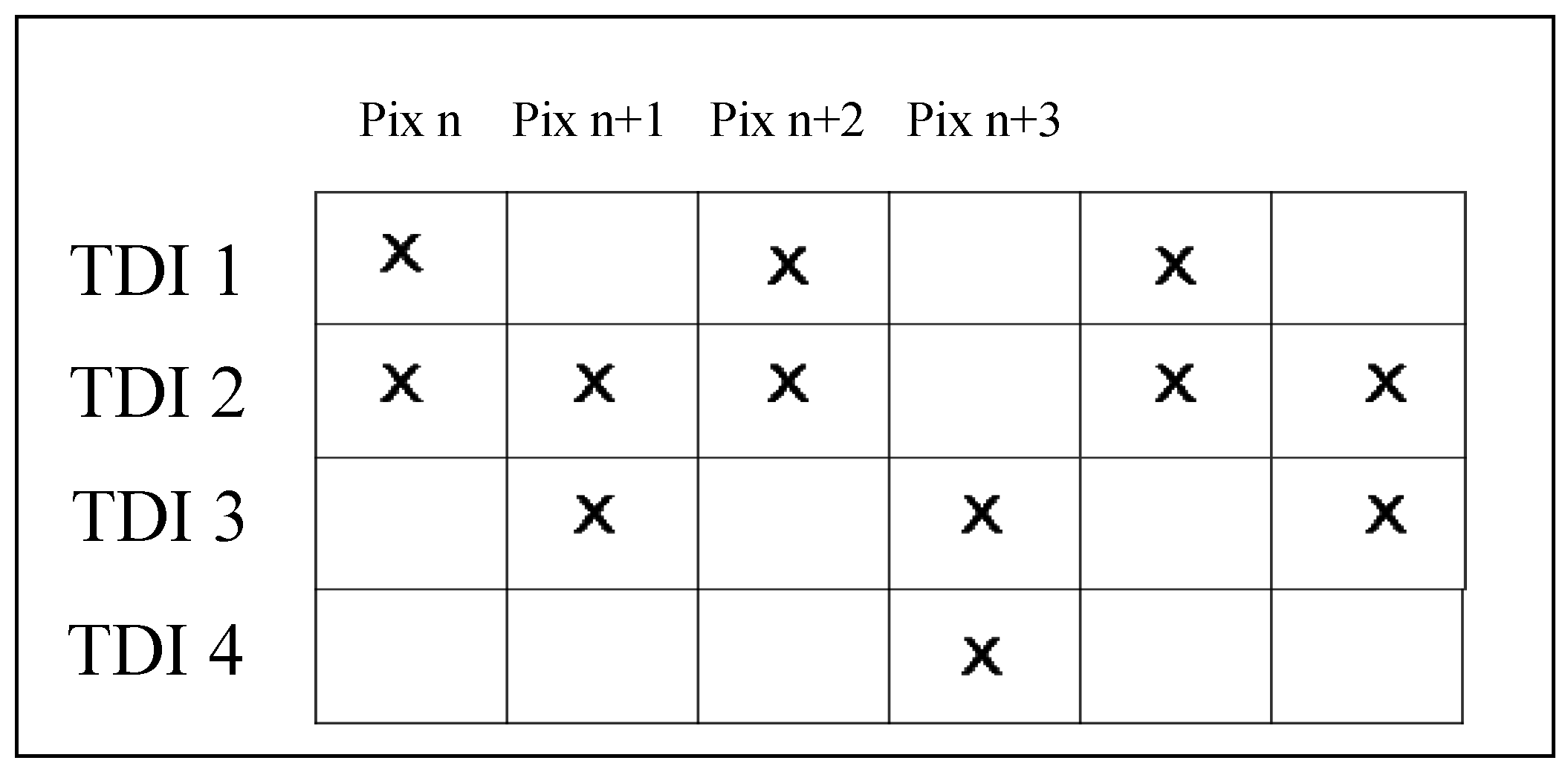
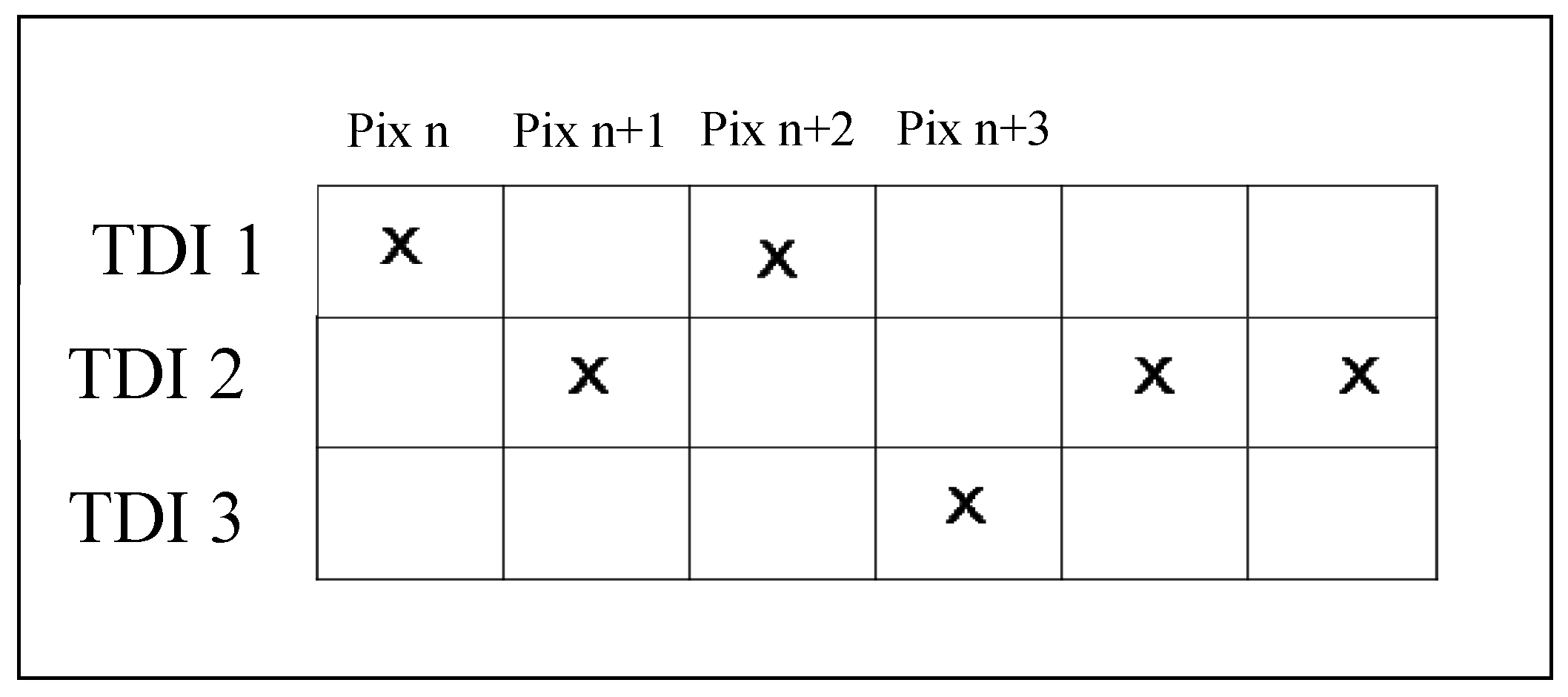
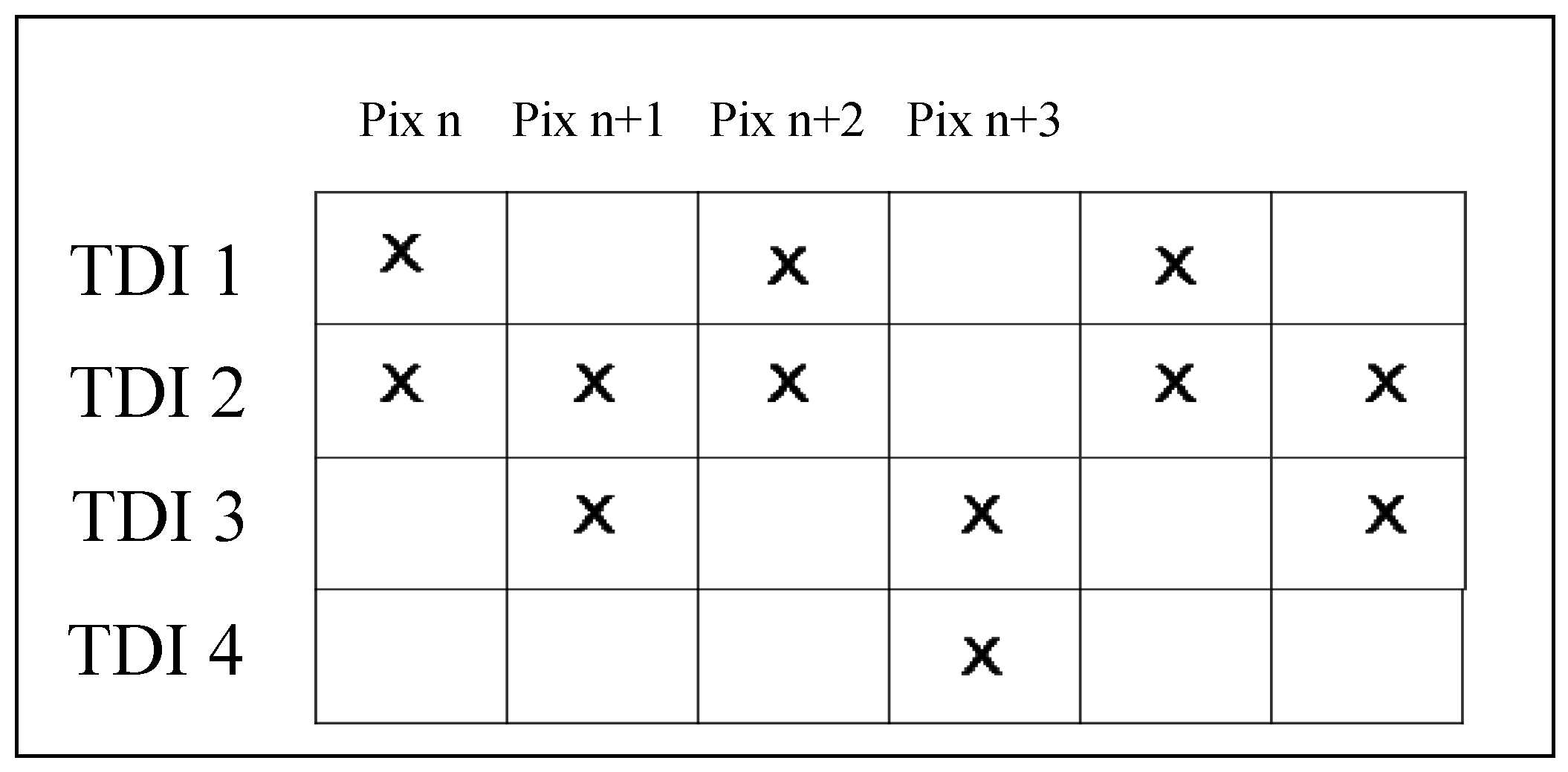
Figure 6.
Time Delay Integration (TDI) configuration examples for pixels of SWIR bands. Top figure corresponds to B10 configuration, Bottom figure corresponds to B11 and B12 configuration. Each column corresponds to one pixel. The lines correspond to available TDI lines. A cross corresponds to the TDI line selected for each pixel. For B10, 3 TDI lines are available for only 1 line selected per pixel. Therefore 3 configurations per pixel are possible. The actual configuration may be different from one pixel to the other. For B11 and B12, 4 TDI lines are available, and 2 consecutive lines are used for each pixel. Therefore, 3 configurations per pixel are possible.
Figure 6.
Time Delay Integration (TDI) configuration examples for pixels of SWIR bands. Top figure corresponds to B10 configuration, Bottom figure corresponds to B11 and B12 configuration. Each column corresponds to one pixel. The lines correspond to available TDI lines. A cross corresponds to the TDI line selected for each pixel. For B10, 3 TDI lines are available for only 1 line selected per pixel. Therefore 3 configurations per pixel are possible. The actual configuration may be different from one pixel to the other. For B11 and B12, 4 TDI lines are available, and 2 consecutive lines are used for each pixel. Therefore, 3 configurations per pixel are possible.
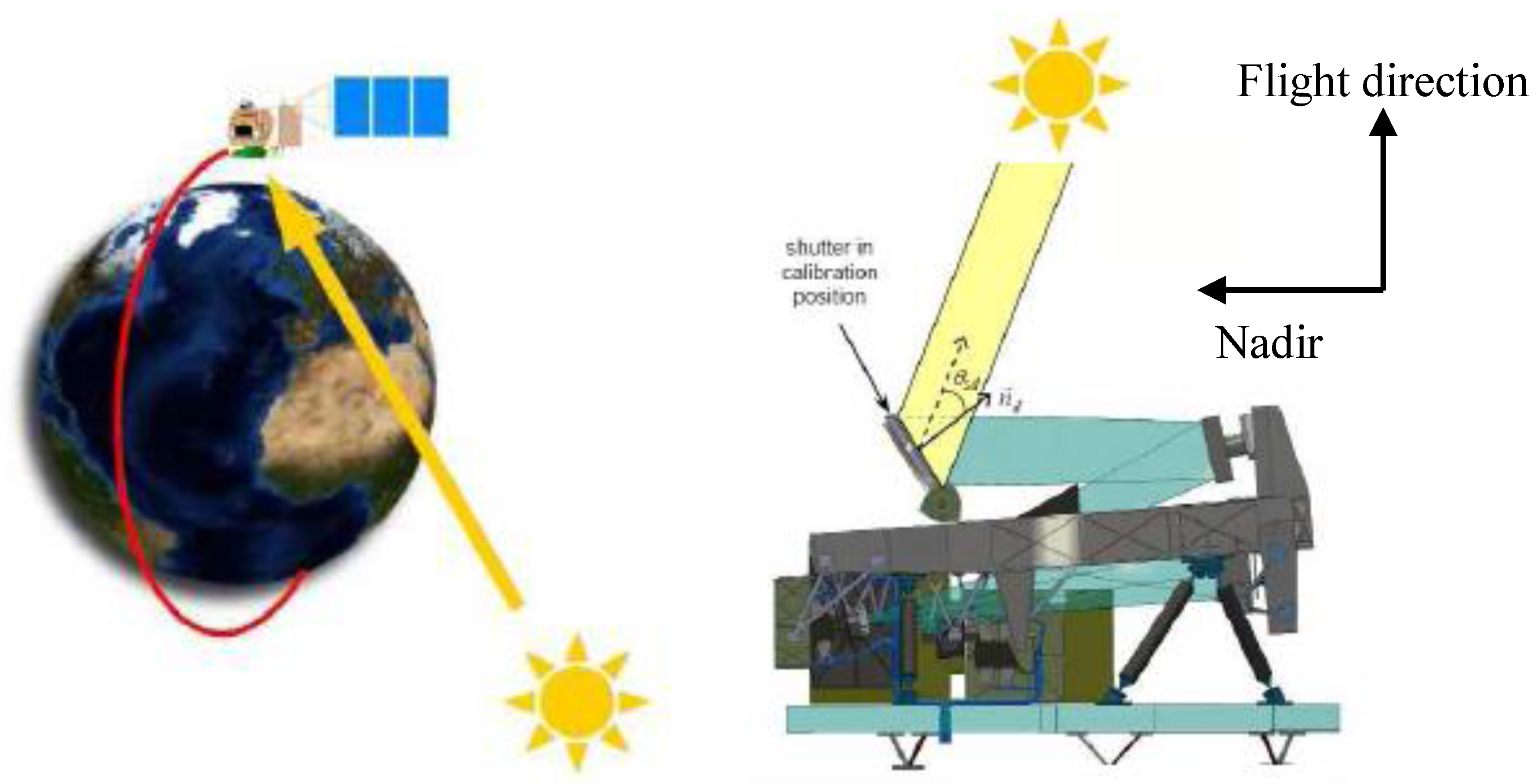
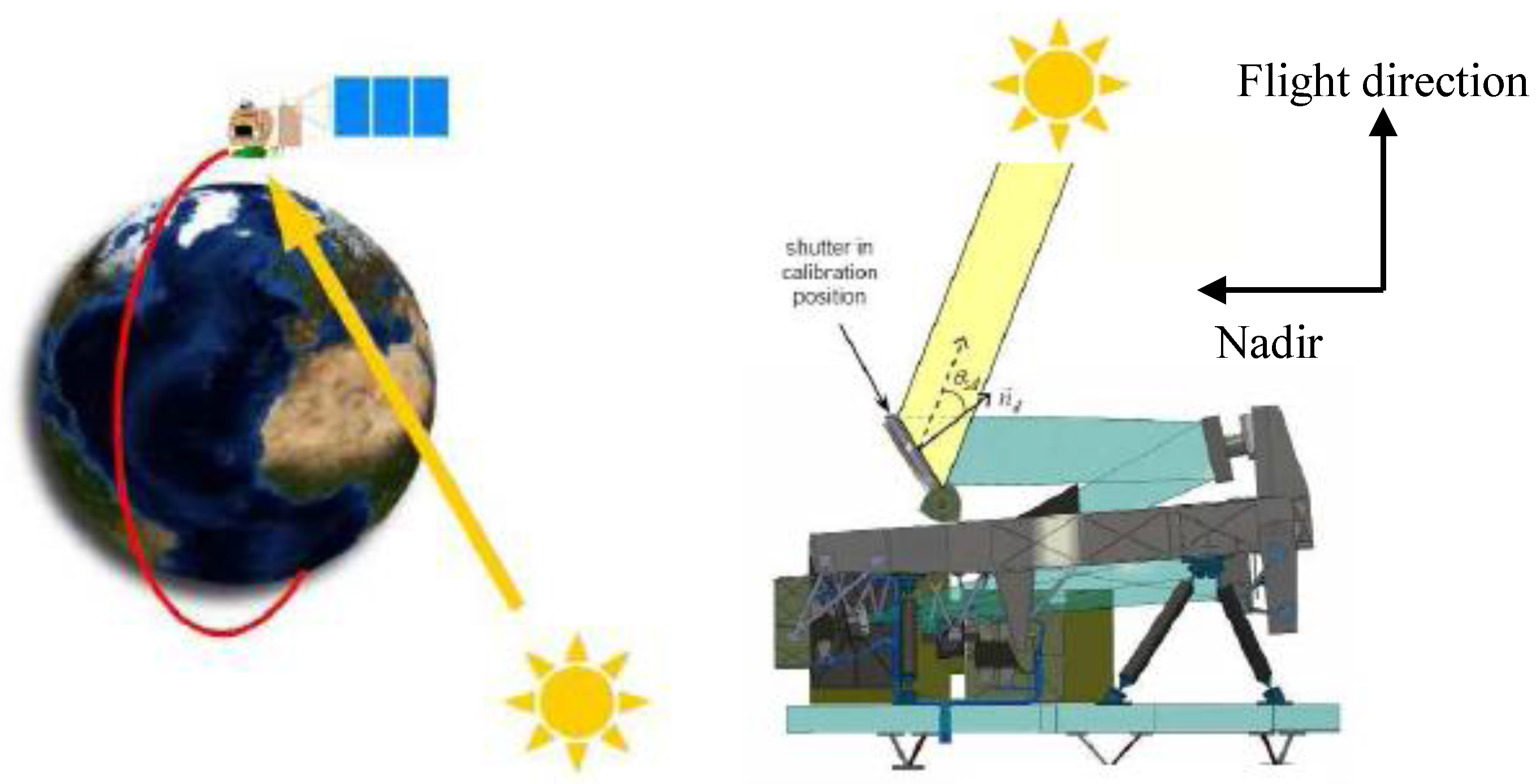
Figure 7.
Illustration of the sun diffuser acquisition principle.
Figure 7.
Illustration of the sun diffuser acquisition principle.
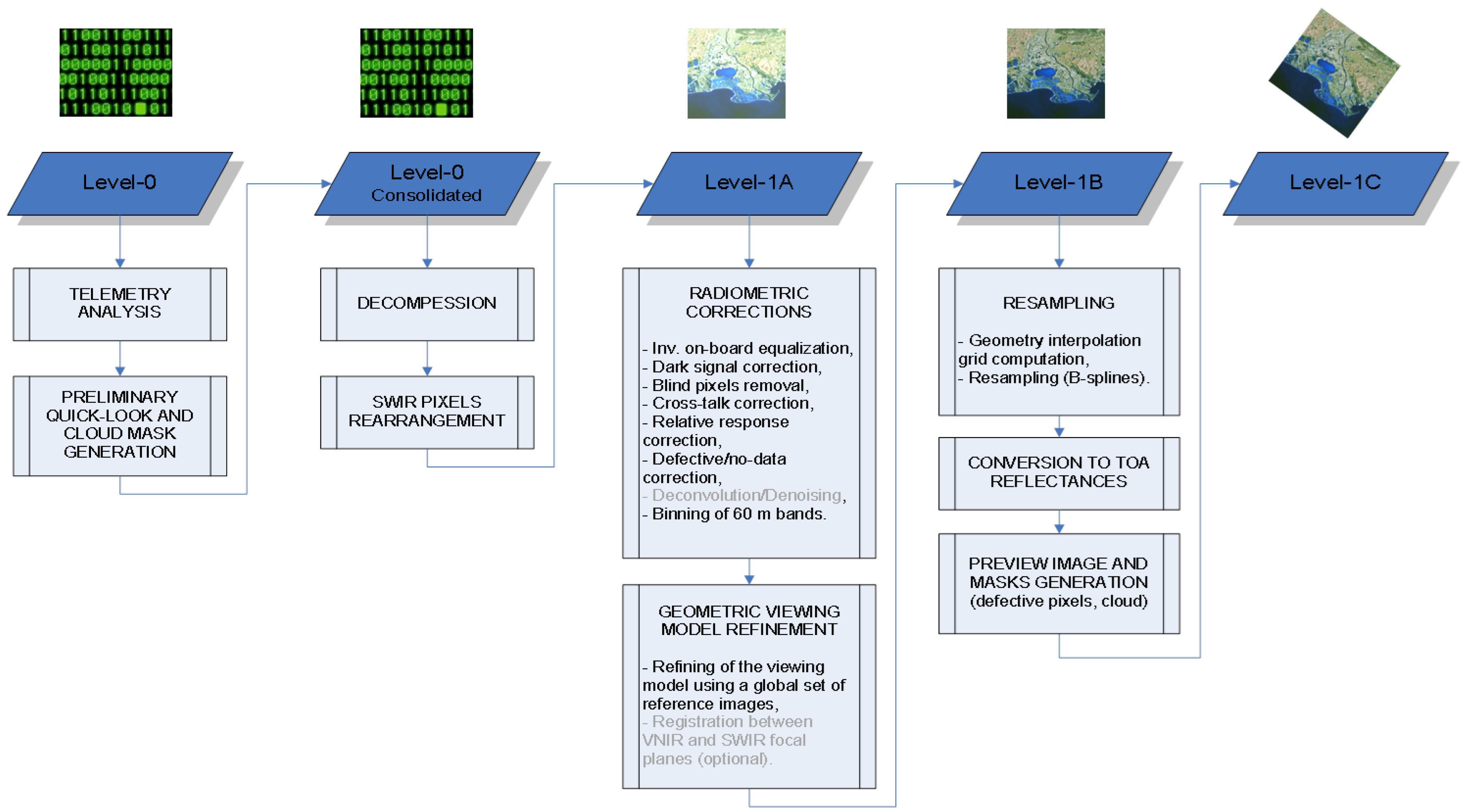
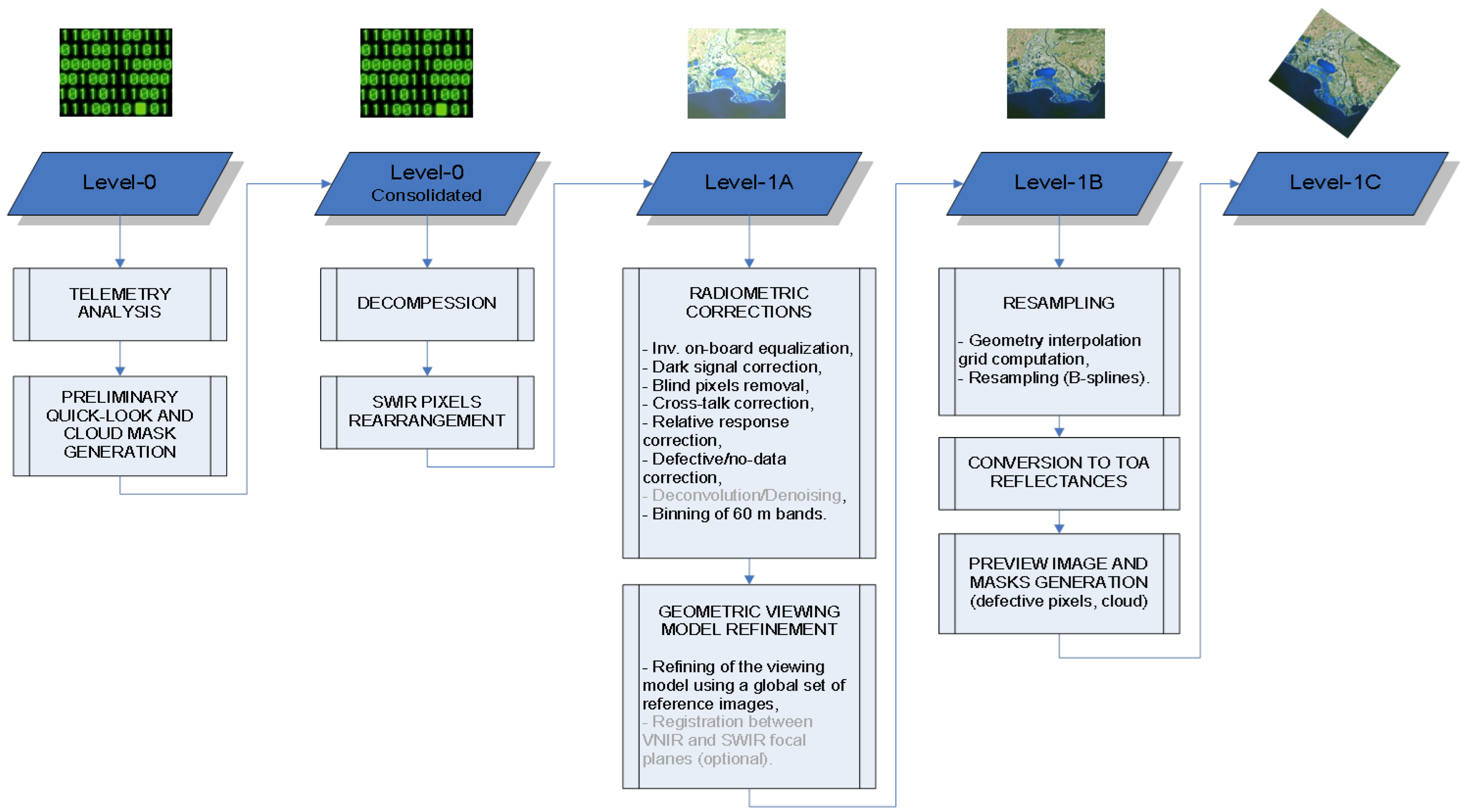
Figure 8.
MSI processing chain overview. The gray font indicate optional steps implemented to mitigate risk on instrument performance but currently not activated.
Figure 8.
MSI processing chain overview. The gray font indicate optional steps implemented to mitigate risk on instrument performance but currently not activated.
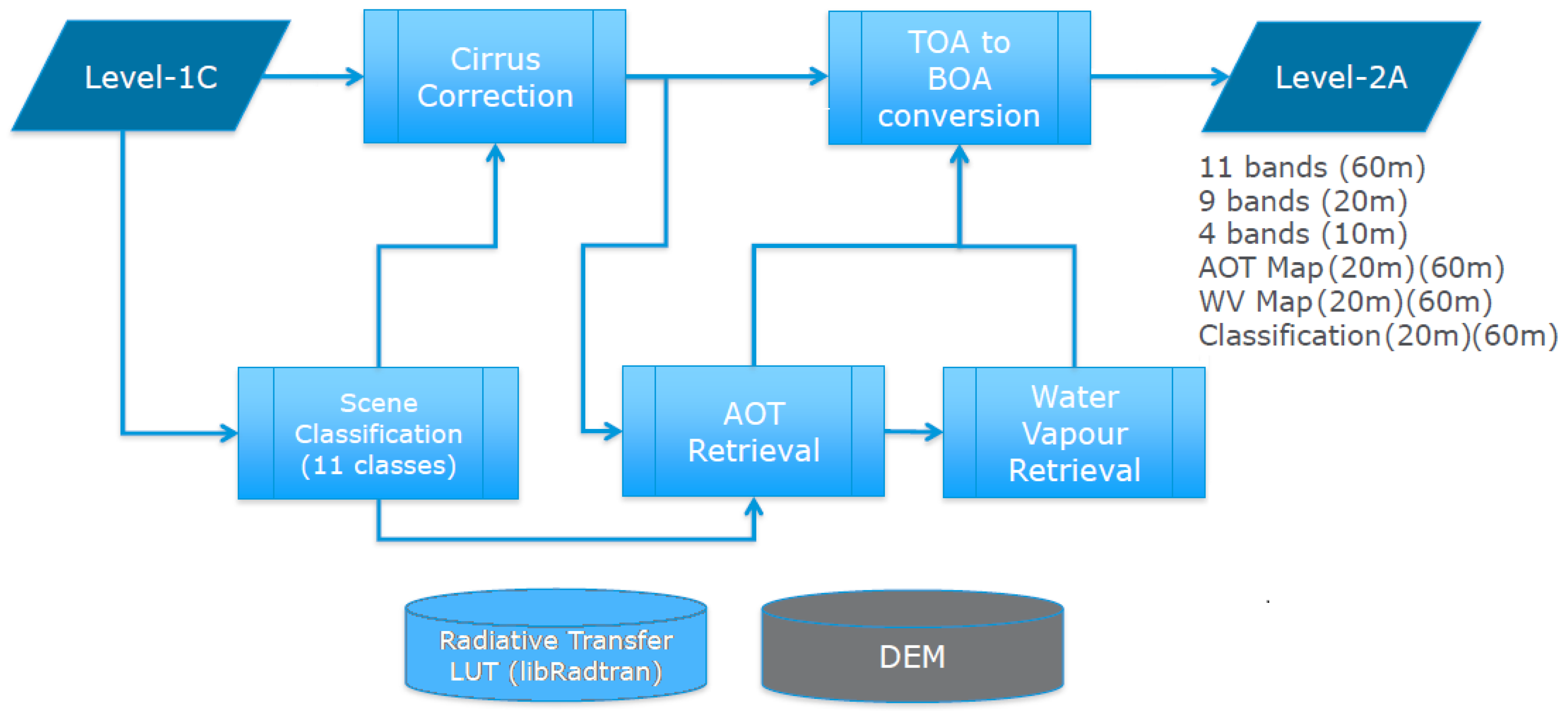
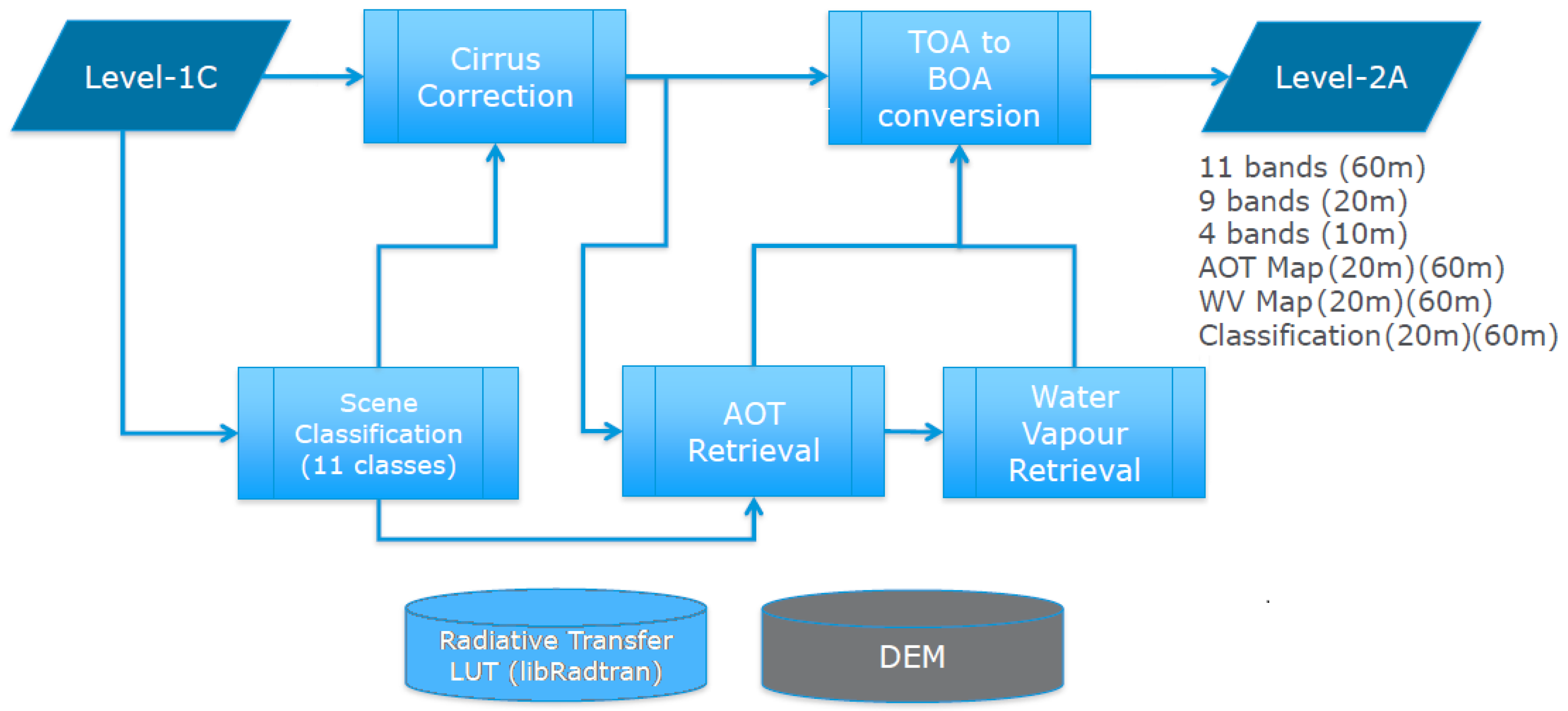
Figure 9.
Level-2A processing chain overview.
Figure 9.
Level-2A processing chain overview.
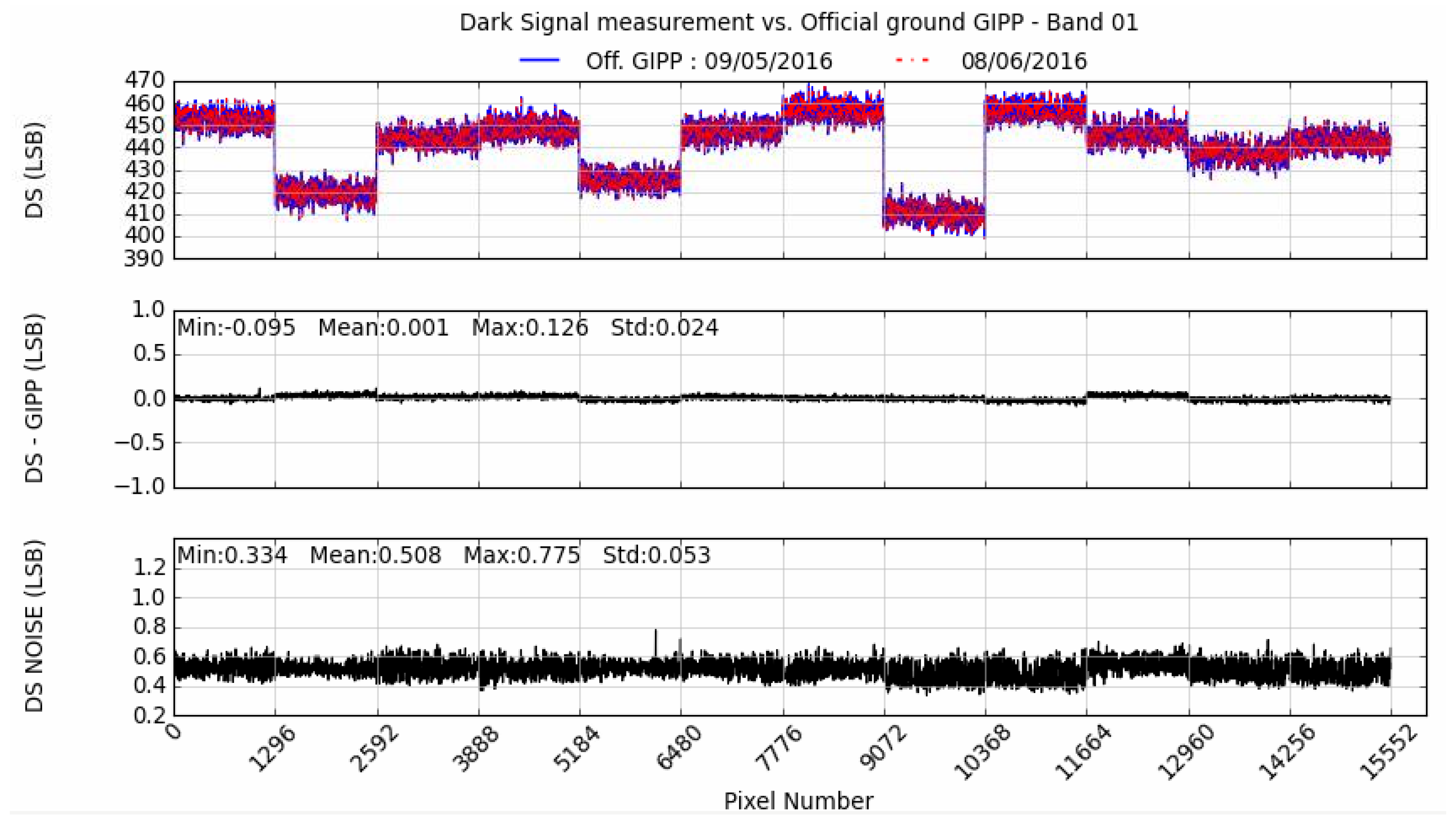
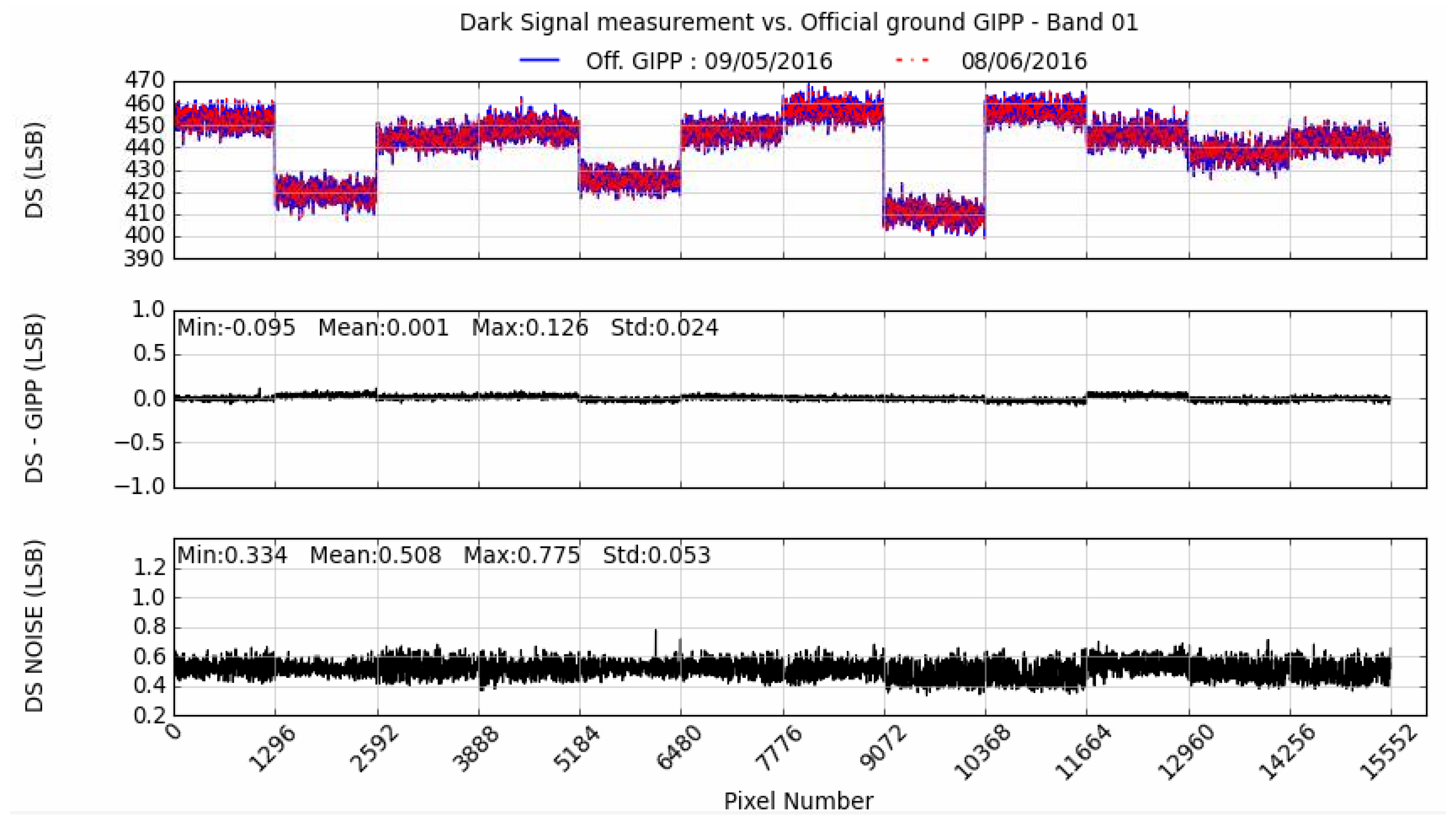
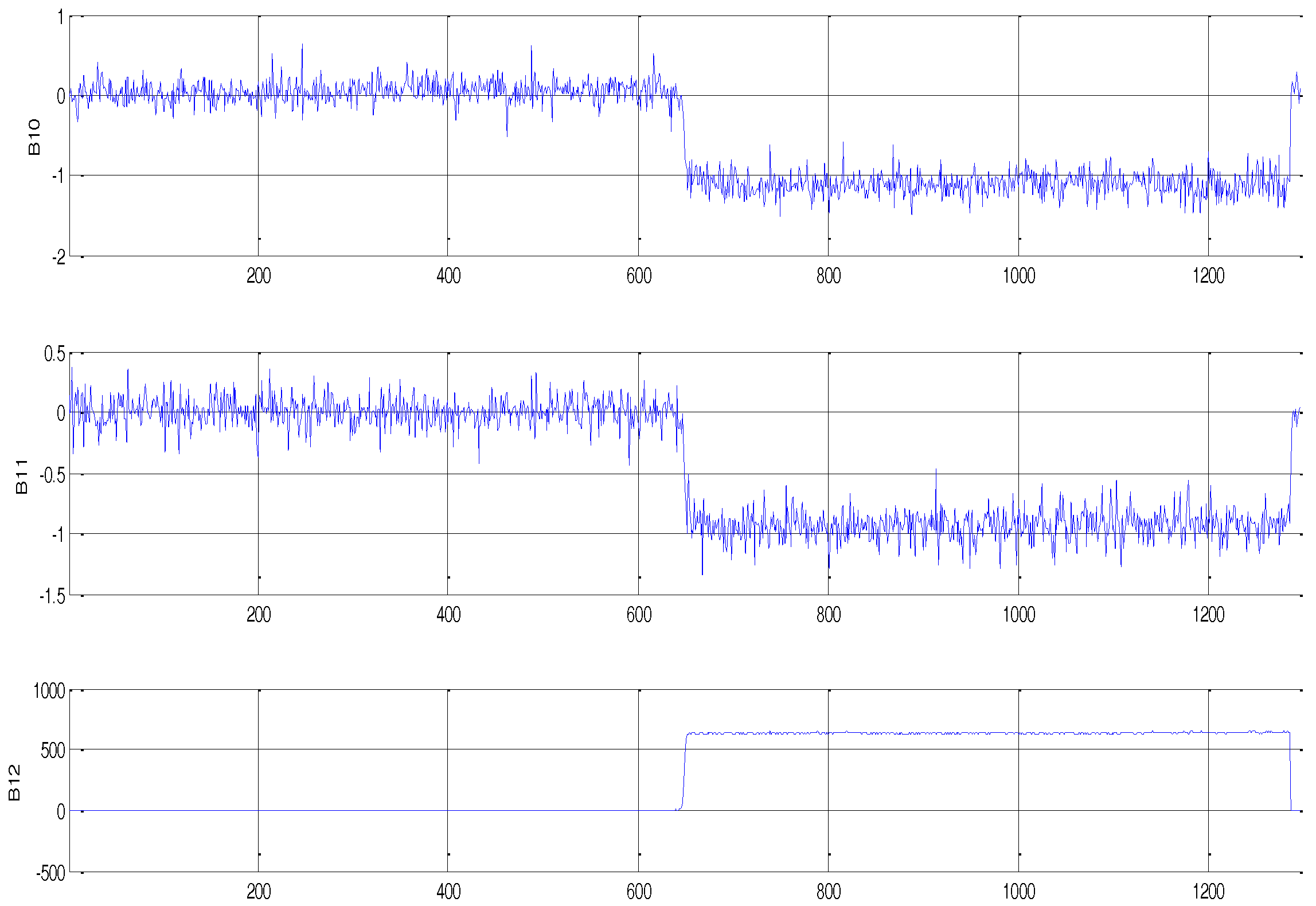
Figure 10.
Variation of the dark signal measured on 8 June 2016, for the B01 band, with respect to the coefficients calculated from dark acquisition on 9 May 2016. The first plot shows the dark signal level (in digital counts, LSB) as a function of the pixel number, the second plot shows its variation between the two dates, the third plot shows its noise (in LSB).
Figure 10.
Variation of the dark signal measured on 8 June 2016, for the B01 band, with respect to the coefficients calculated from dark acquisition on 9 May 2016. The first plot shows the dark signal level (in digital counts, LSB) as a function of the pixel number, the second plot shows its variation between the two dates, the third plot shows its noise (in LSB).
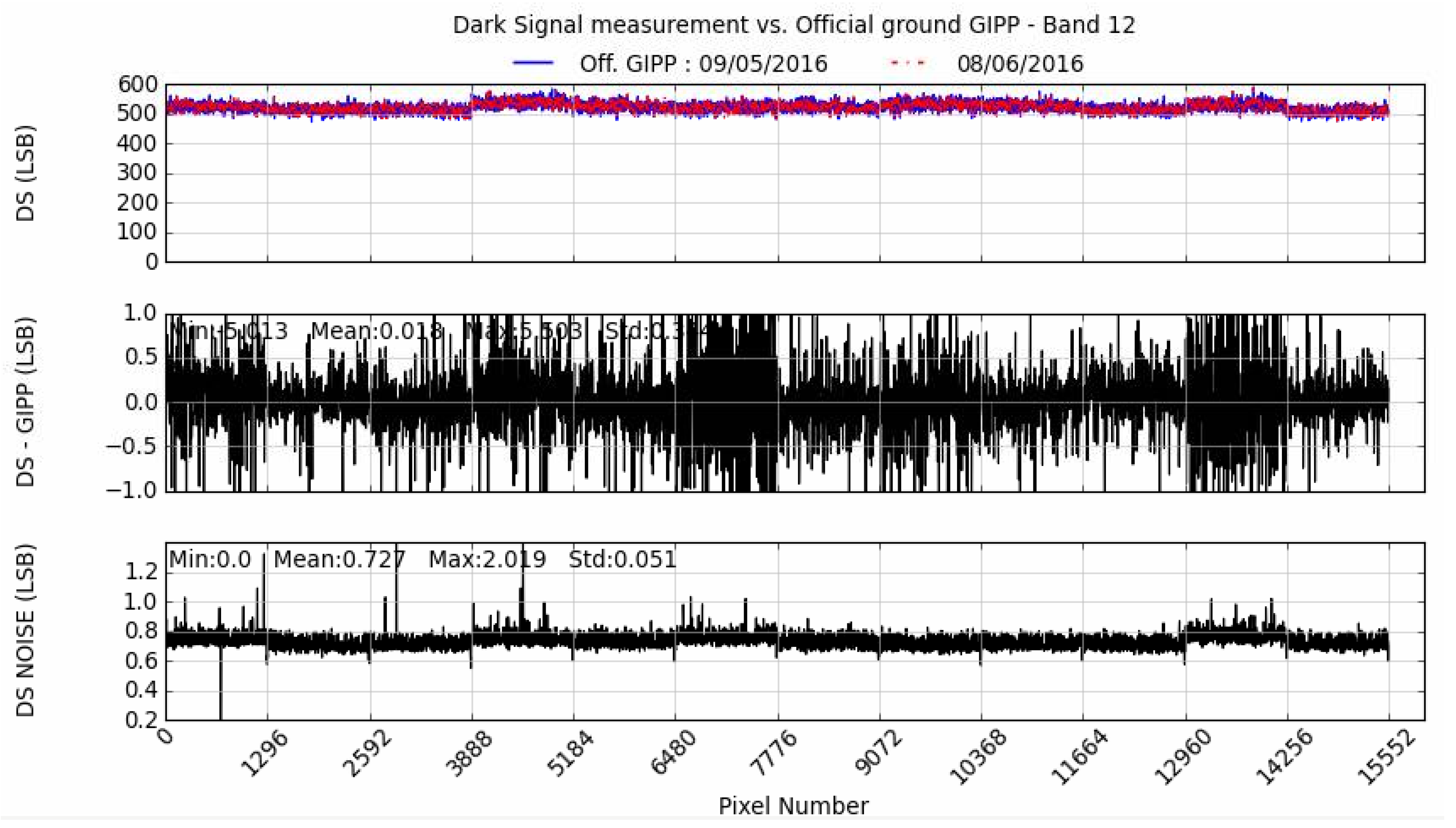
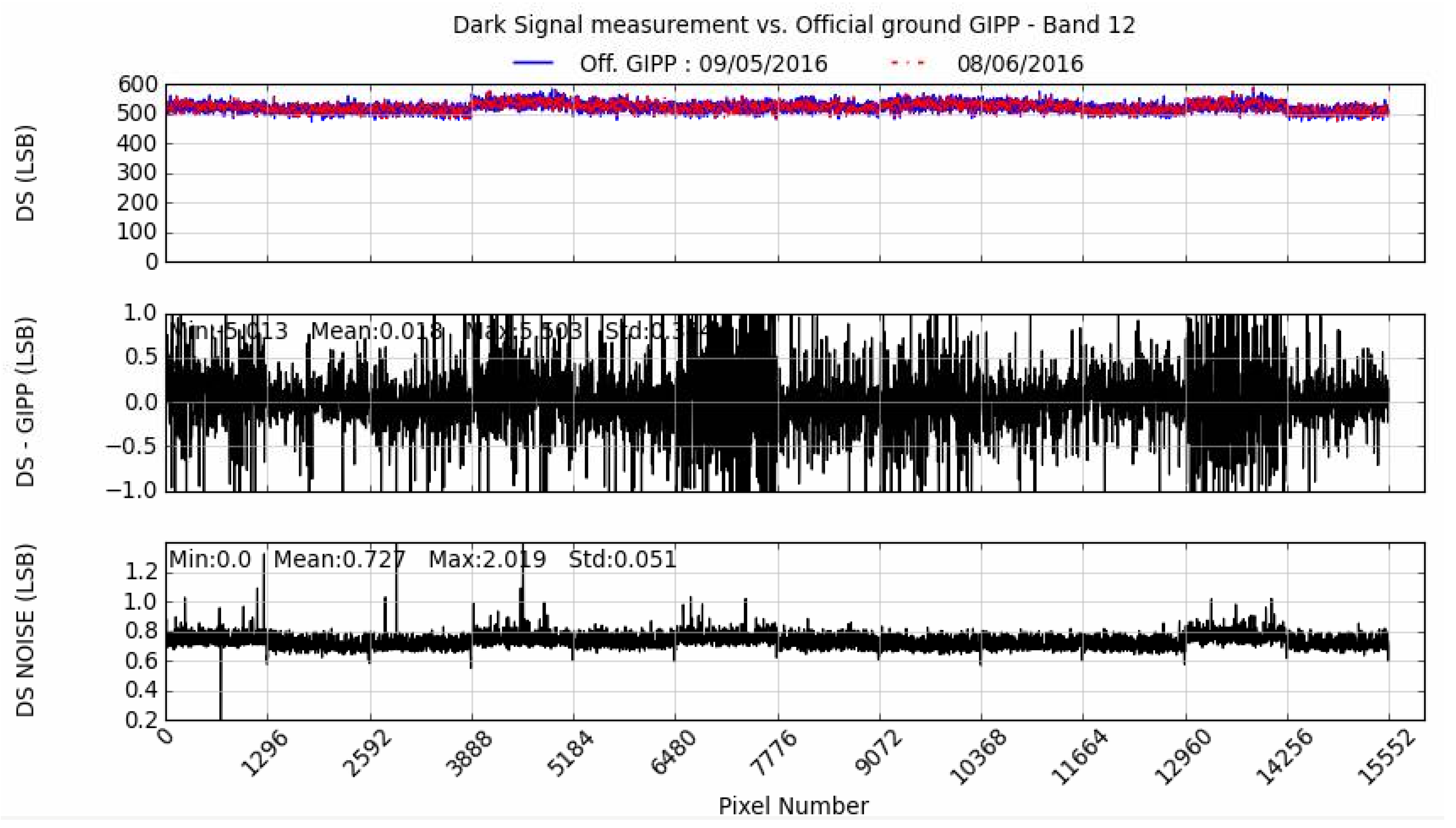
Figure 11.
Same as
Figure 10 but for the B12 band.
Figure 11.
Same as
Figure 10 but for the B12 band.
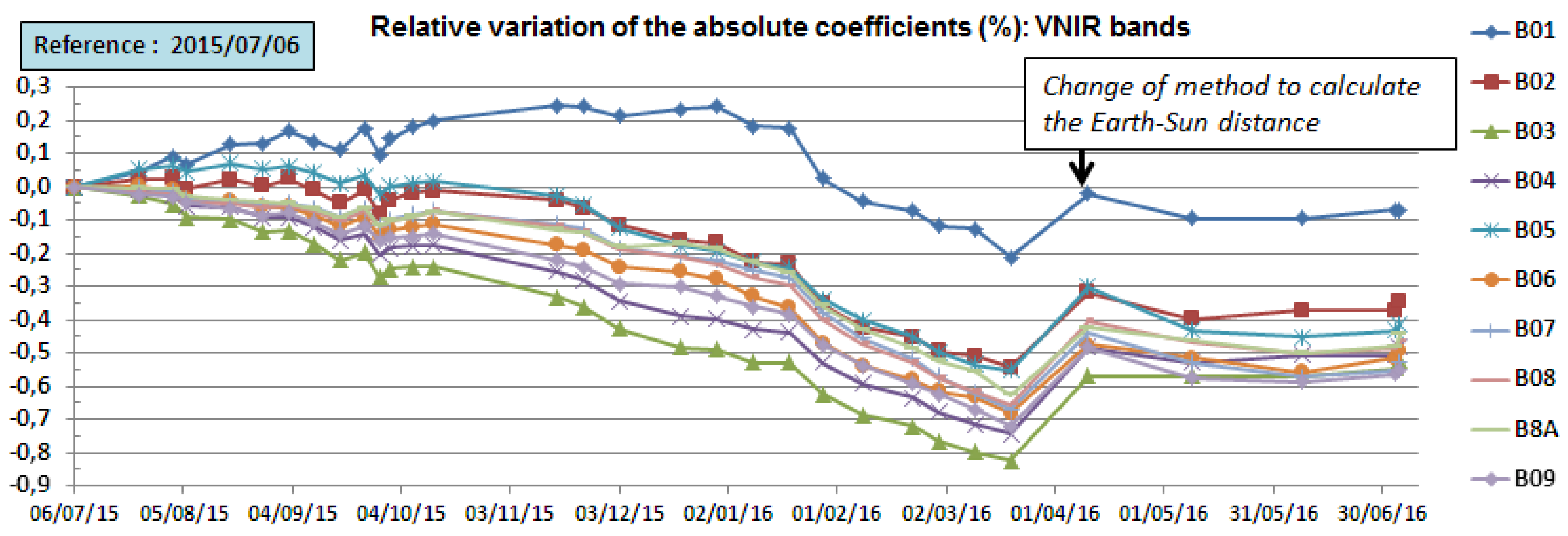
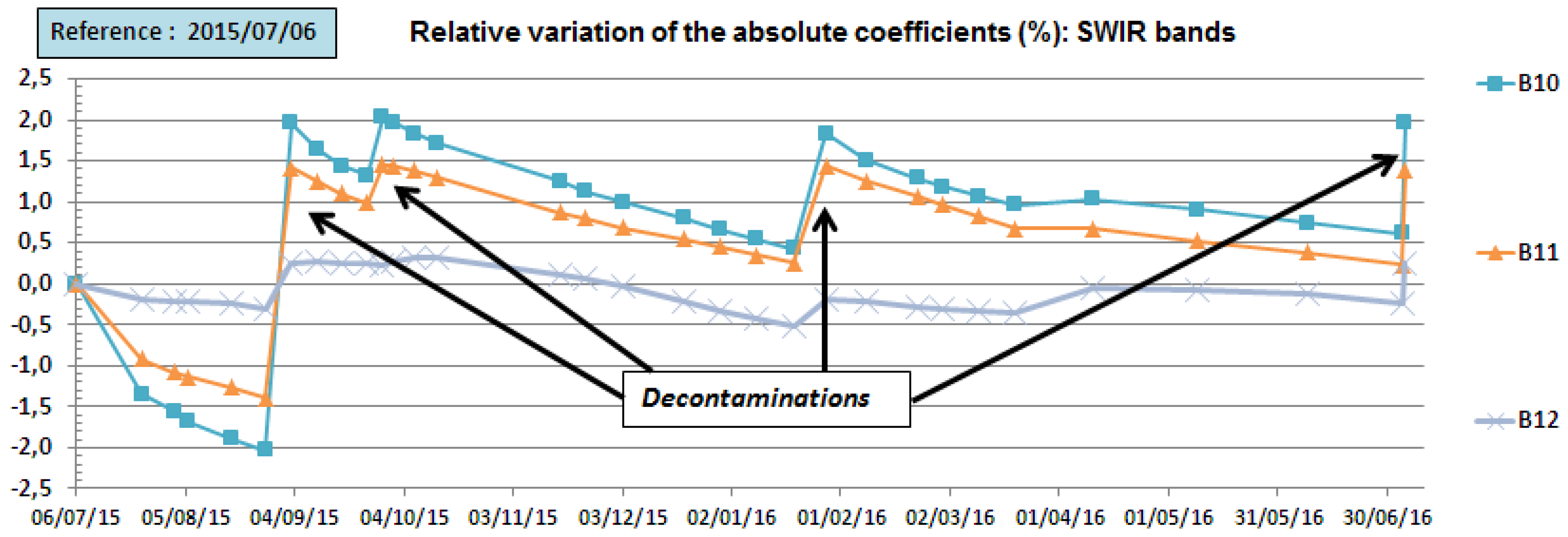
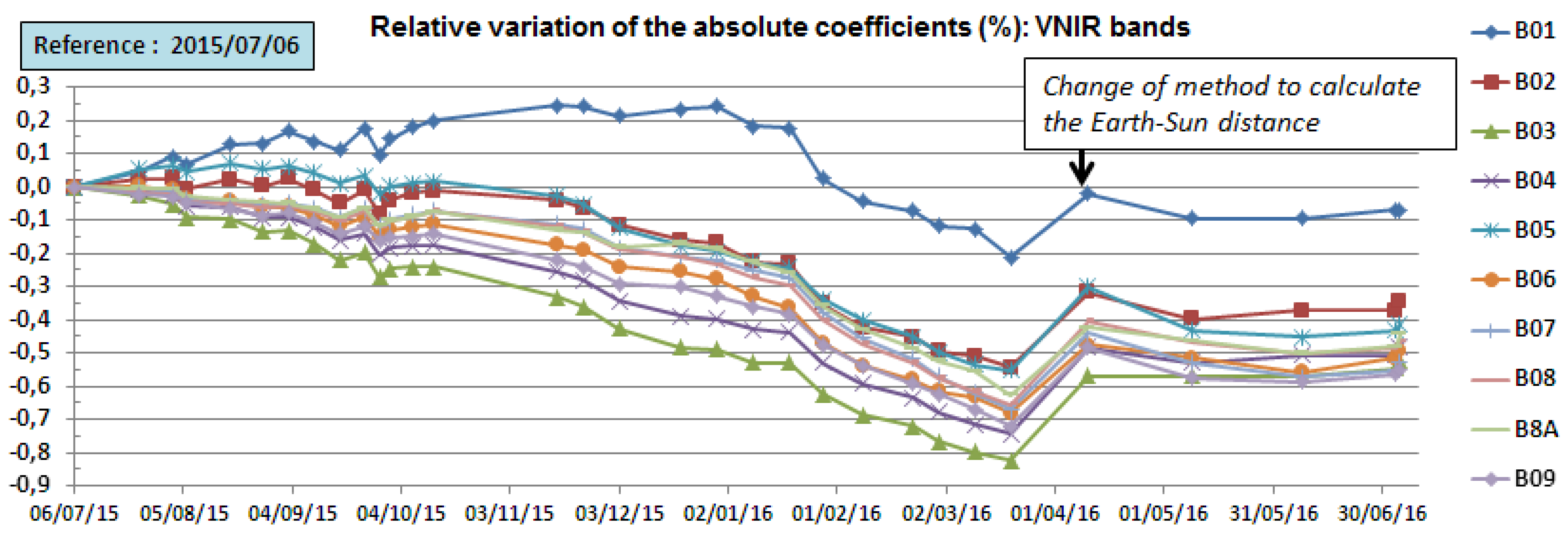
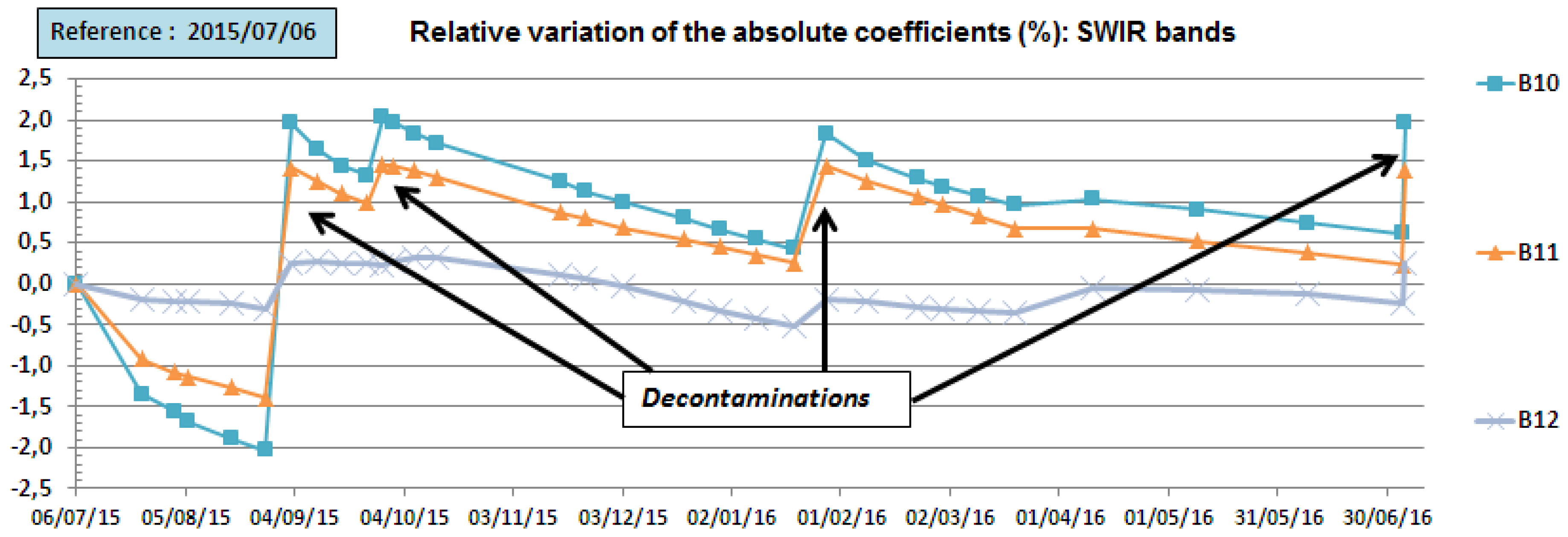
Figure 12.
Time variation of the absolute calibration coefficients (for the processing baseline version 02.04), normalized to the coefficients estimated from the first Sun-diffuser acquisition performed on 06 July 2015.
Figure 12.
Time variation of the absolute calibration coefficients (for the processing baseline version 02.04), normalized to the coefficients estimated from the first Sun-diffuser acquisition performed on 06 July 2015.
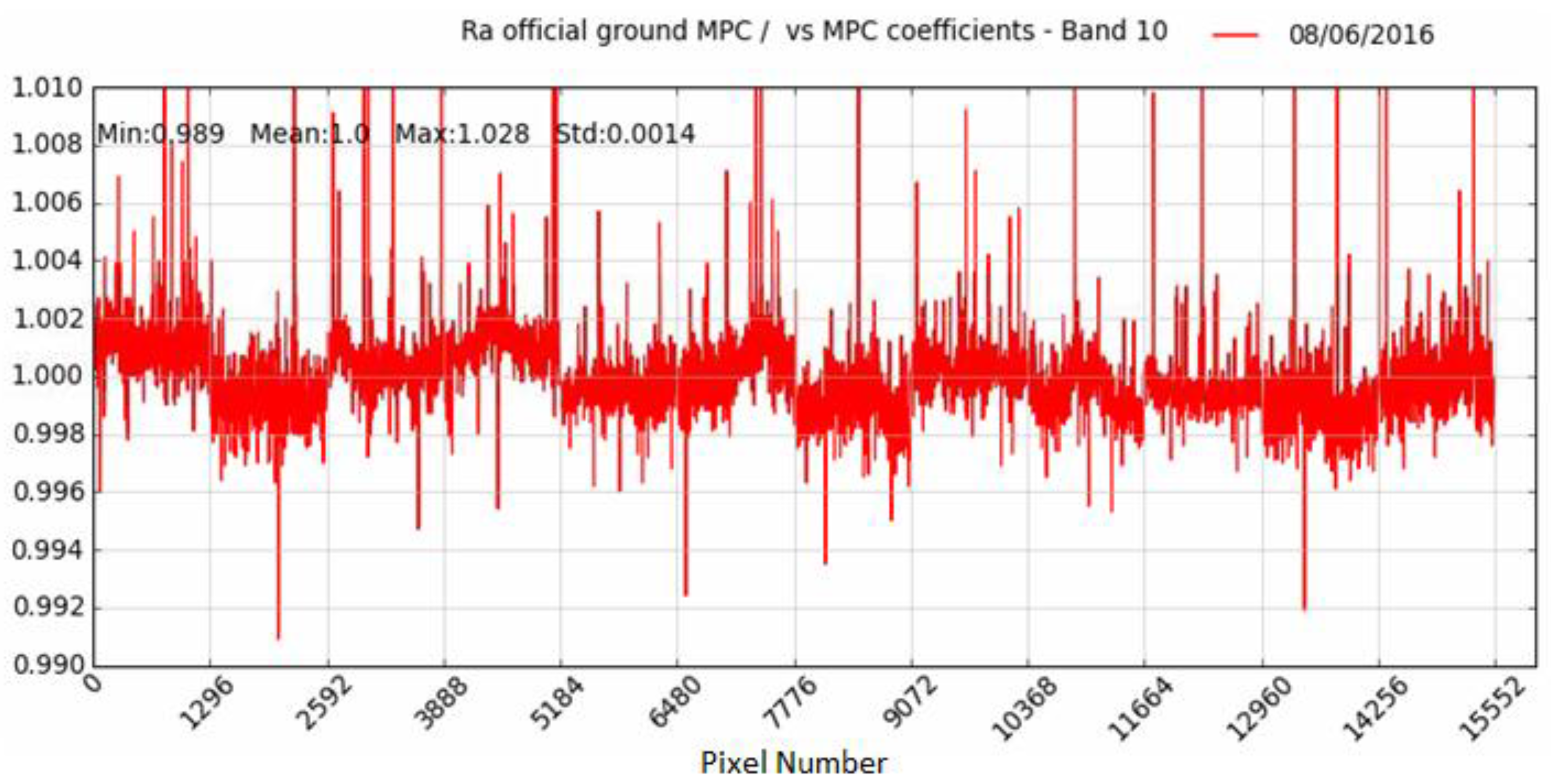
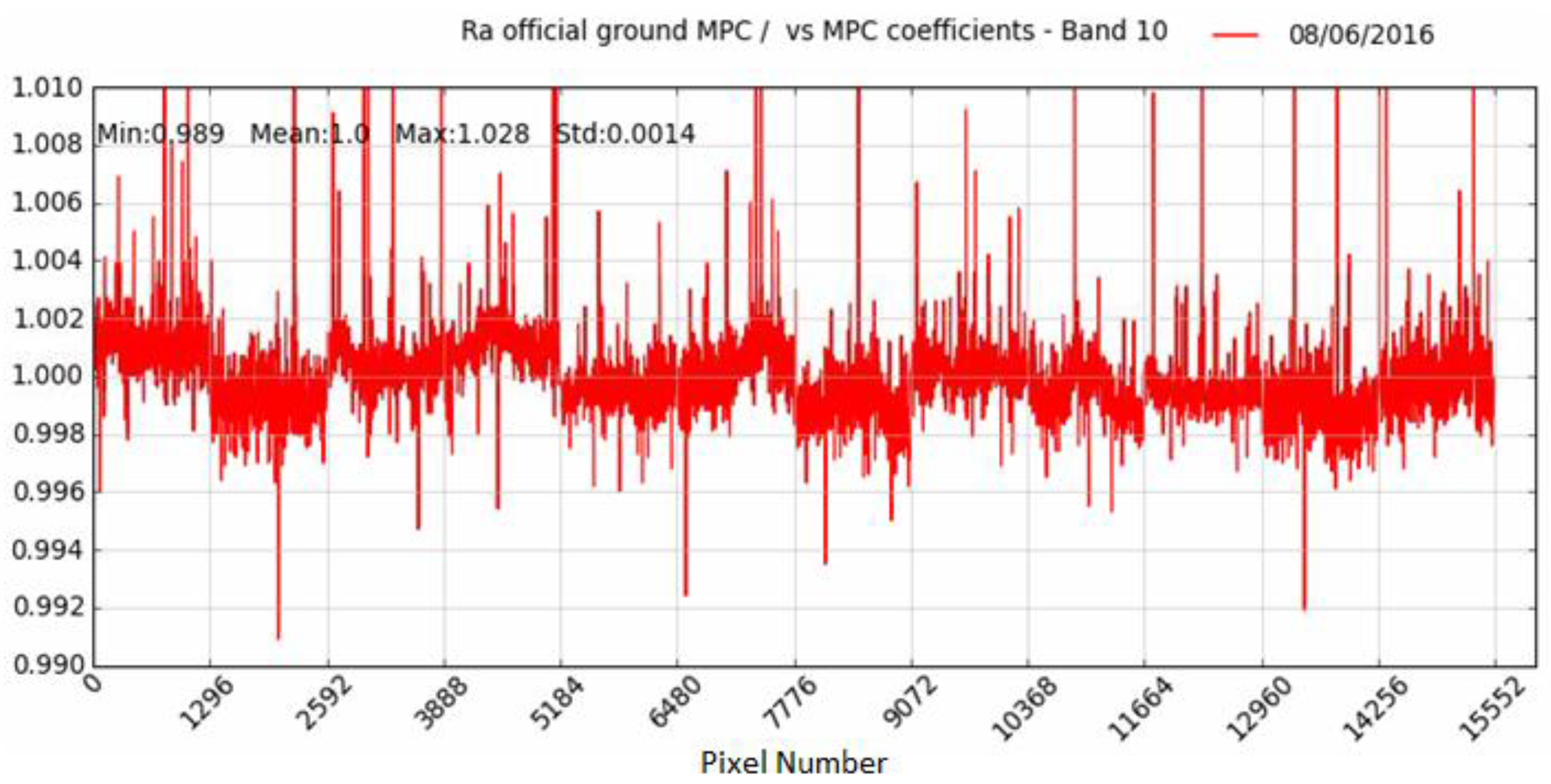
Figure 13.
Ra factor as a function of the pixel number (over the 12 detectors) for the update of gain functions measured on 8 June 2016, for the B10 band, with respect to the previous operational coefficients calculated from the sun-diffuser acquisition on 9 May 2016.
Figure 13.
Ra factor as a function of the pixel number (over the 12 detectors) for the update of gain functions measured on 8 June 2016, for the B10 band, with respect to the previous operational coefficients calculated from the sun-diffuser acquisition on 9 May 2016.
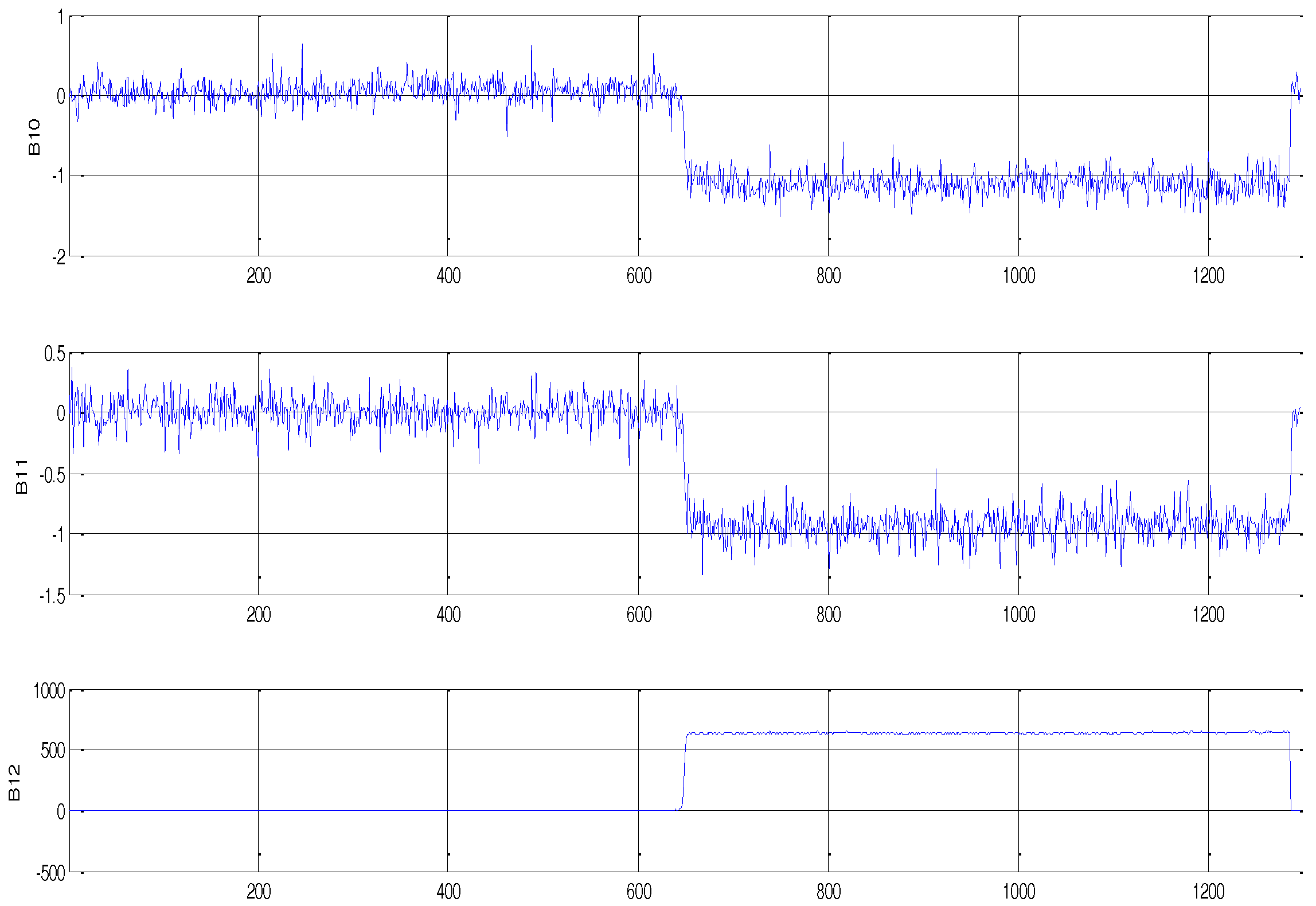
Figure 14.
Characterisation of the electrical crosstalk: example of test result from ground measurement at Focal Plane Assembly (FPA) level (digital counts vs. pixel number).
Figure 14.
Characterisation of the electrical crosstalk: example of test result from ground measurement at Focal Plane Assembly (FPA) level (digital counts vs. pixel number).
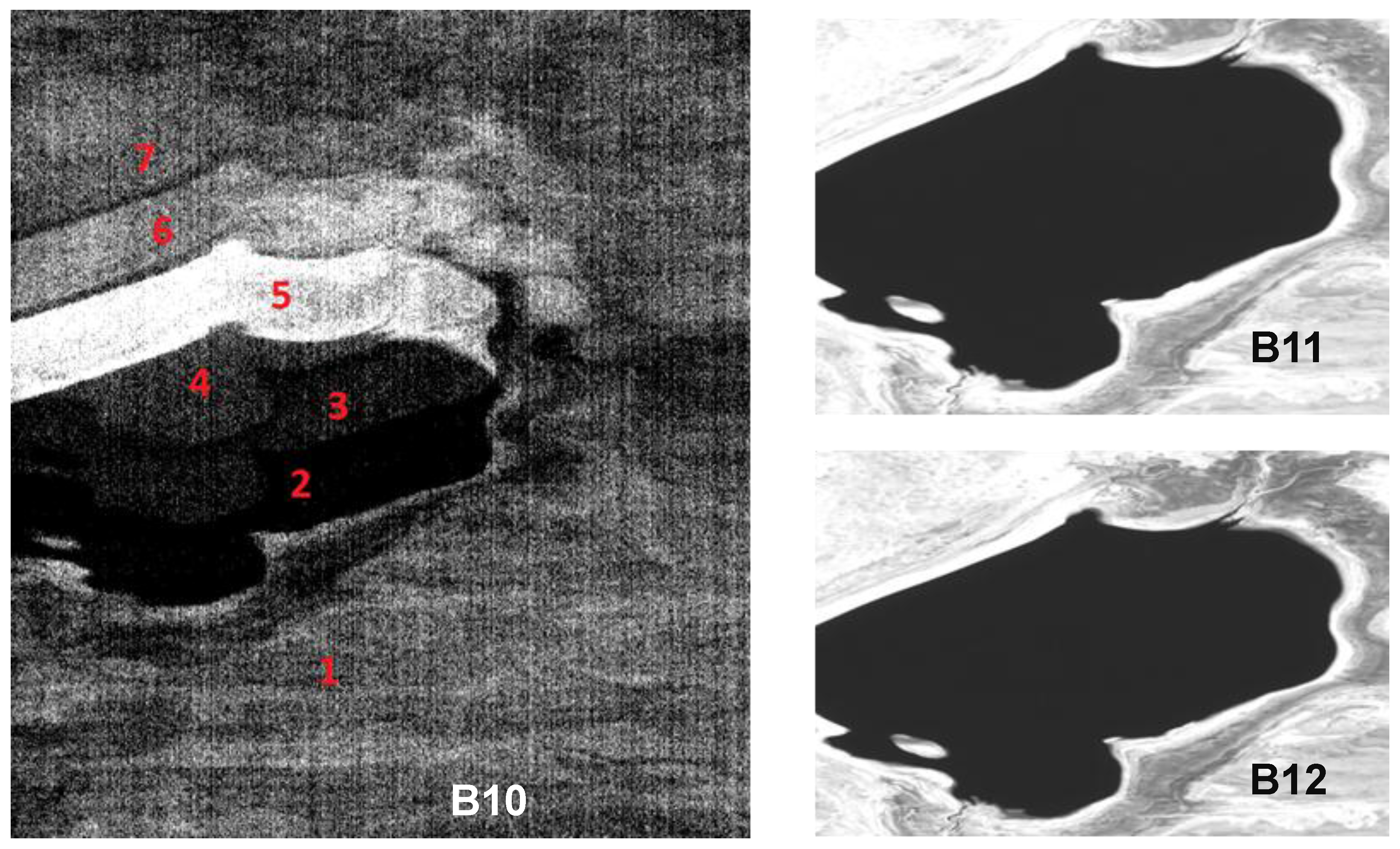
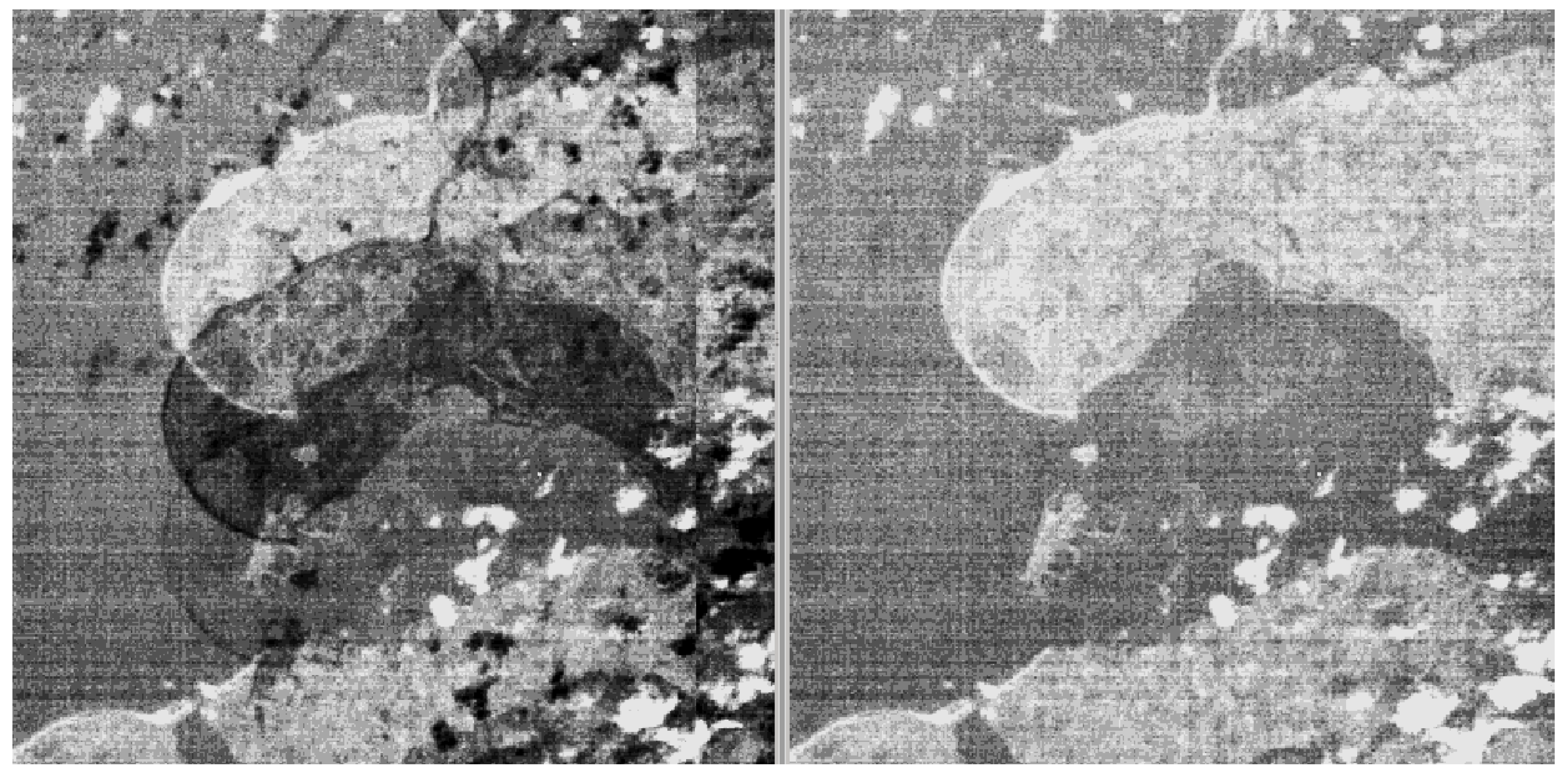
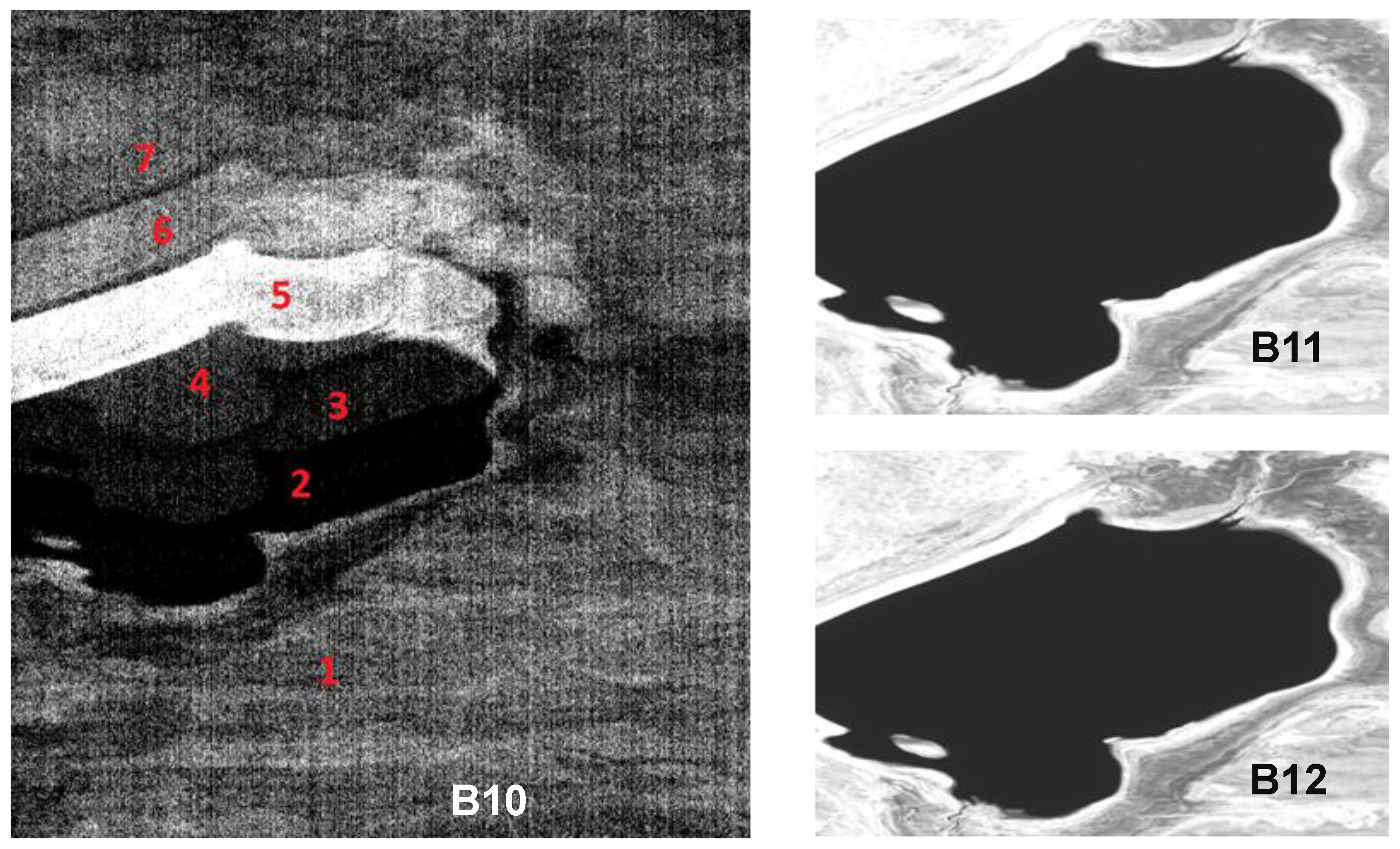
Figure 15.
Left image shows an example of crosstalk affecting B10 (contrast strongly enhanced). Right represent the corresponding acquisitions in B11 and B12.
Figure 15.
Left image shows an example of crosstalk affecting B10 (contrast strongly enhanced). Right represent the corresponding acquisitions in B11 and B12.
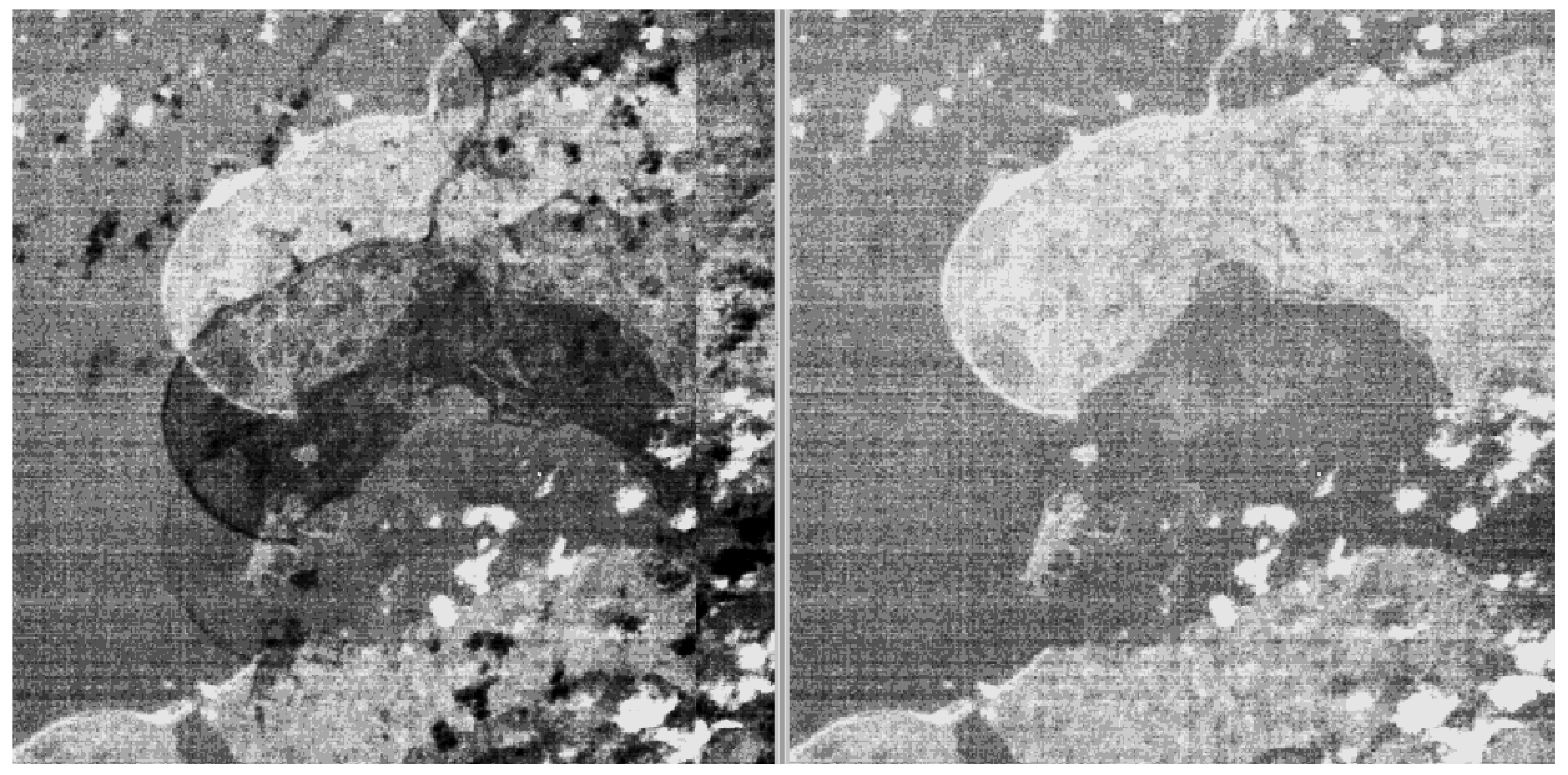
Figure 16.
Example of crosstalk correction on band 10 (before/after).
Figure 16.
Example of crosstalk correction on band 10 (before/after).
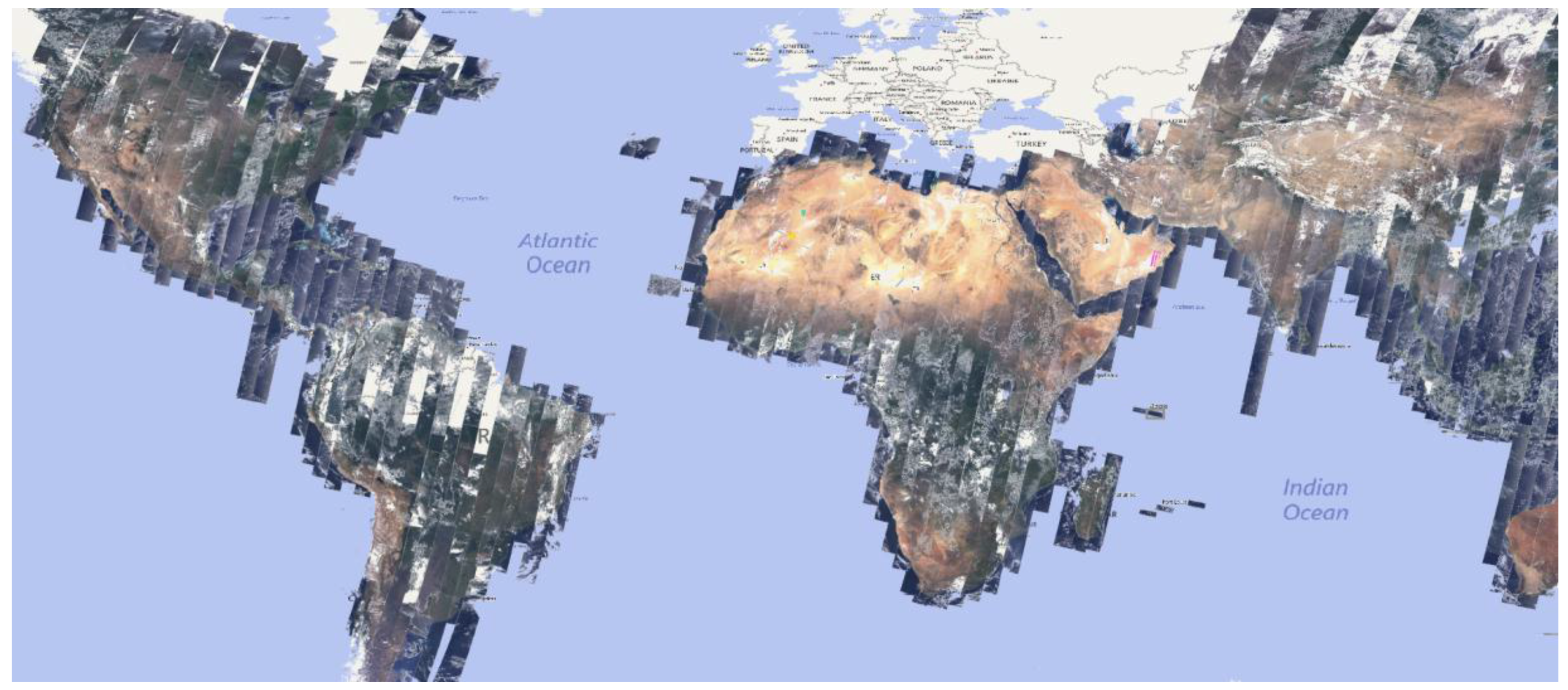
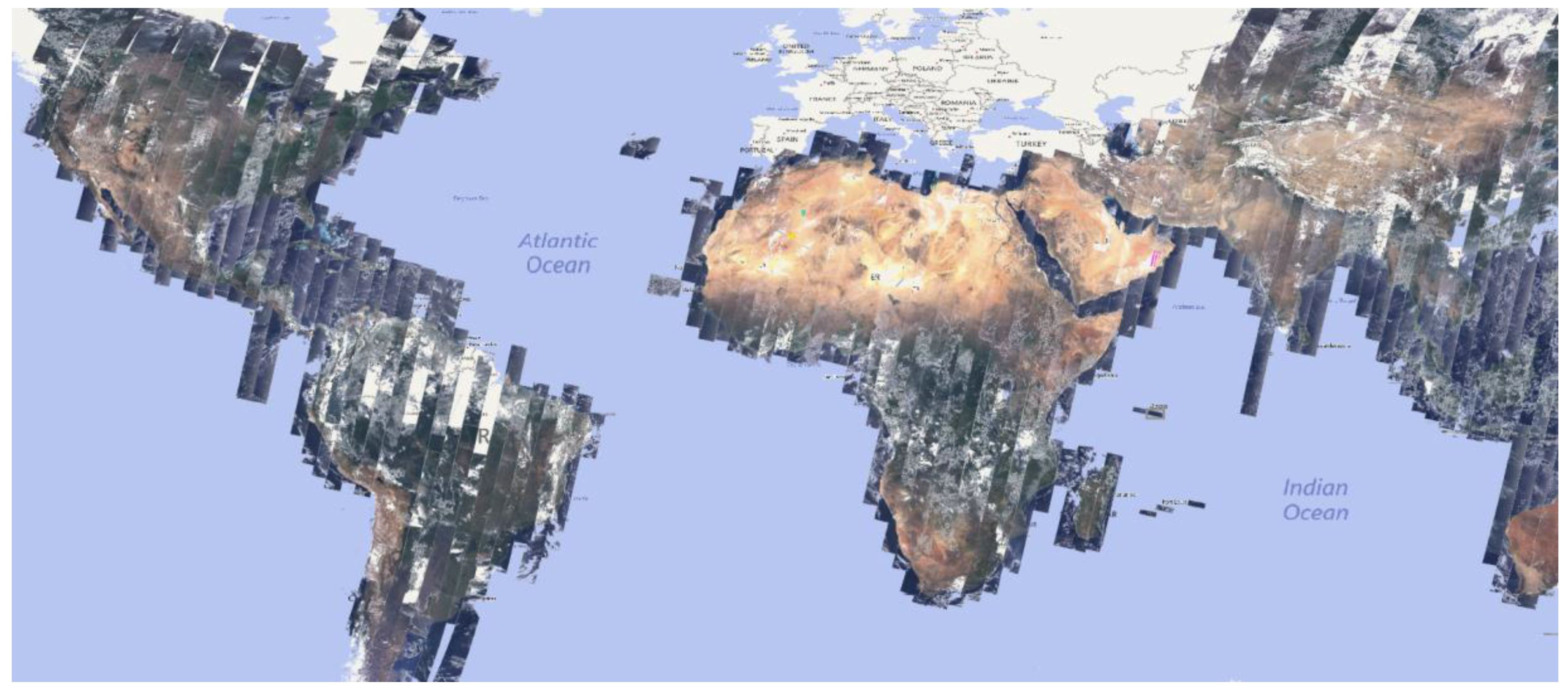
Figure 17.
Overview of the Sentinel-2 GRI selection, July 2016 (European GRI products are not present on this map, since they were produced in the In-Orbit Commissioning Review (IOCR) context, in October 2015).
Figure 17.
Overview of the Sentinel-2 GRI selection, July 2016 (European GRI products are not present on this map, since they were produced in the In-Orbit Commissioning Review (IOCR) context, in October 2015).
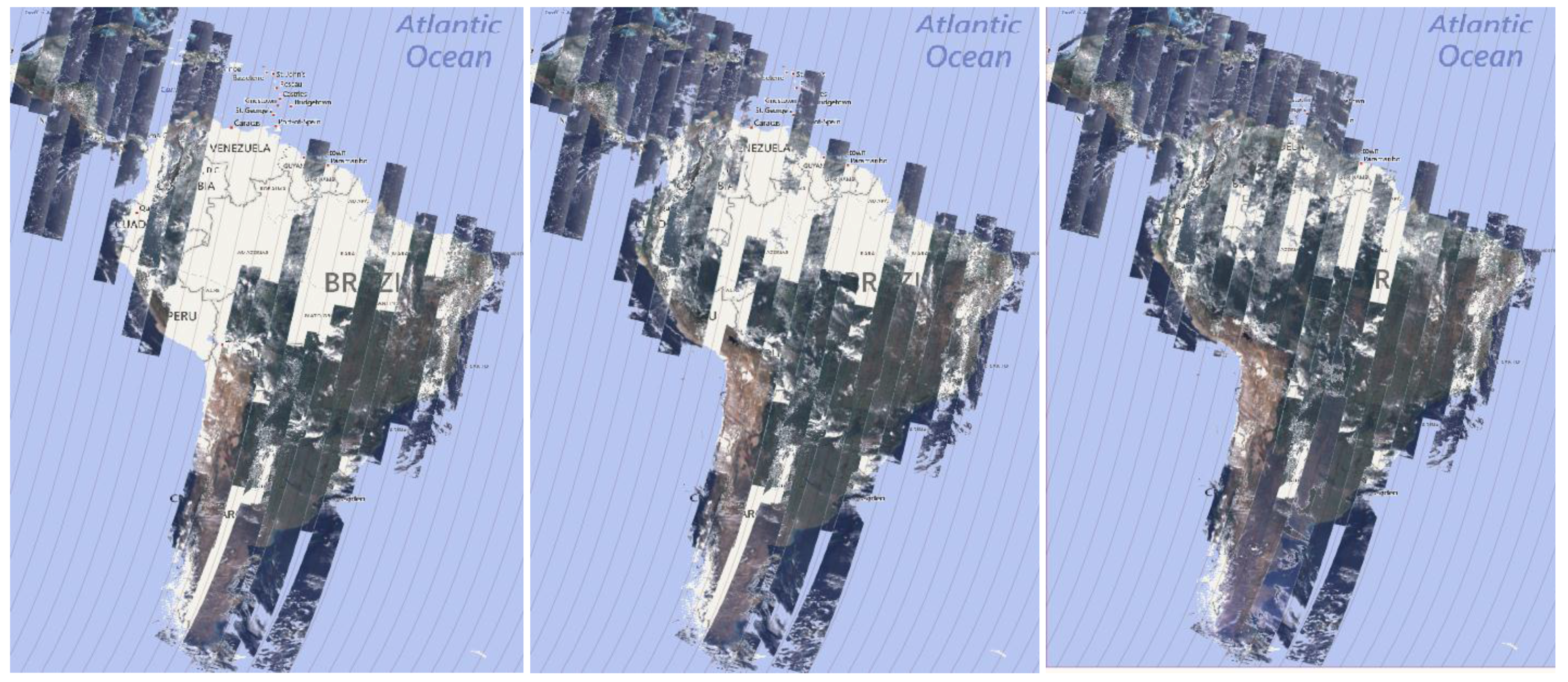
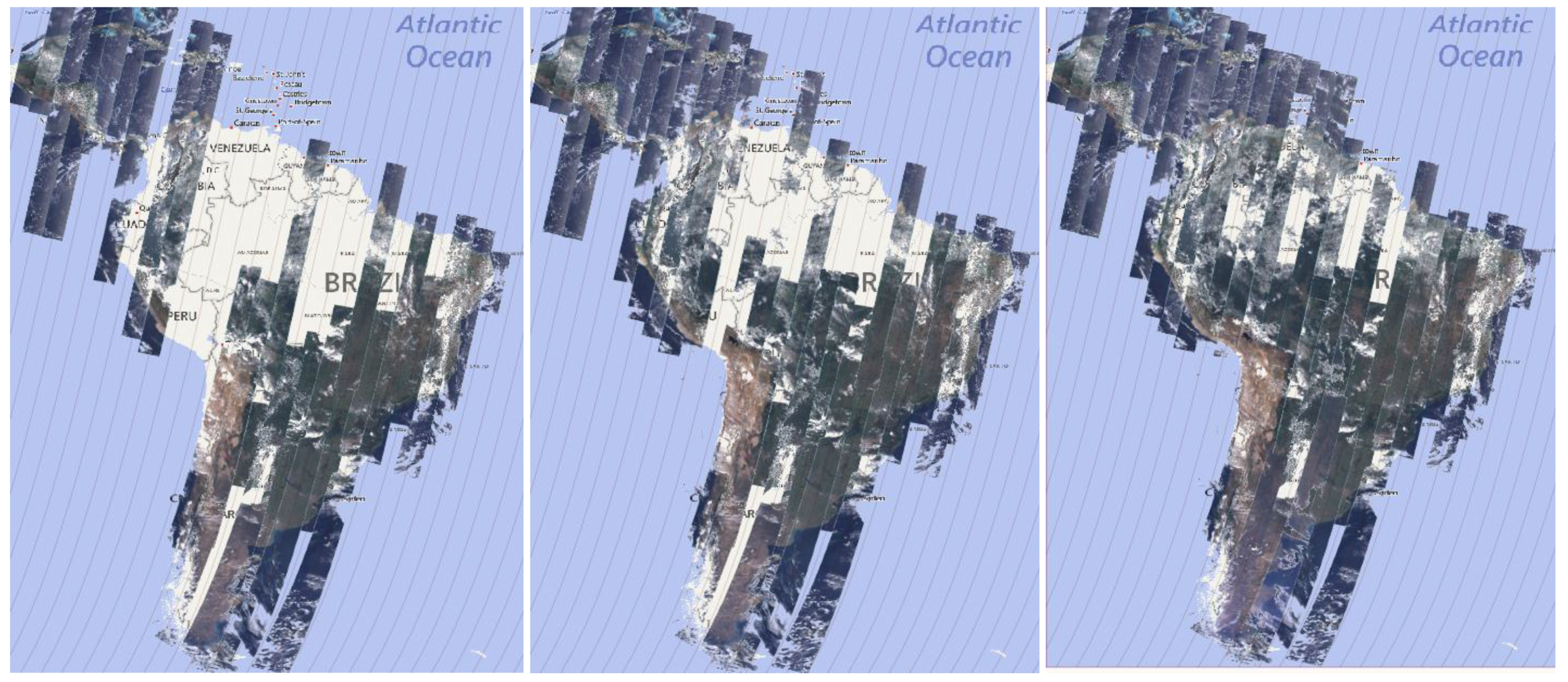
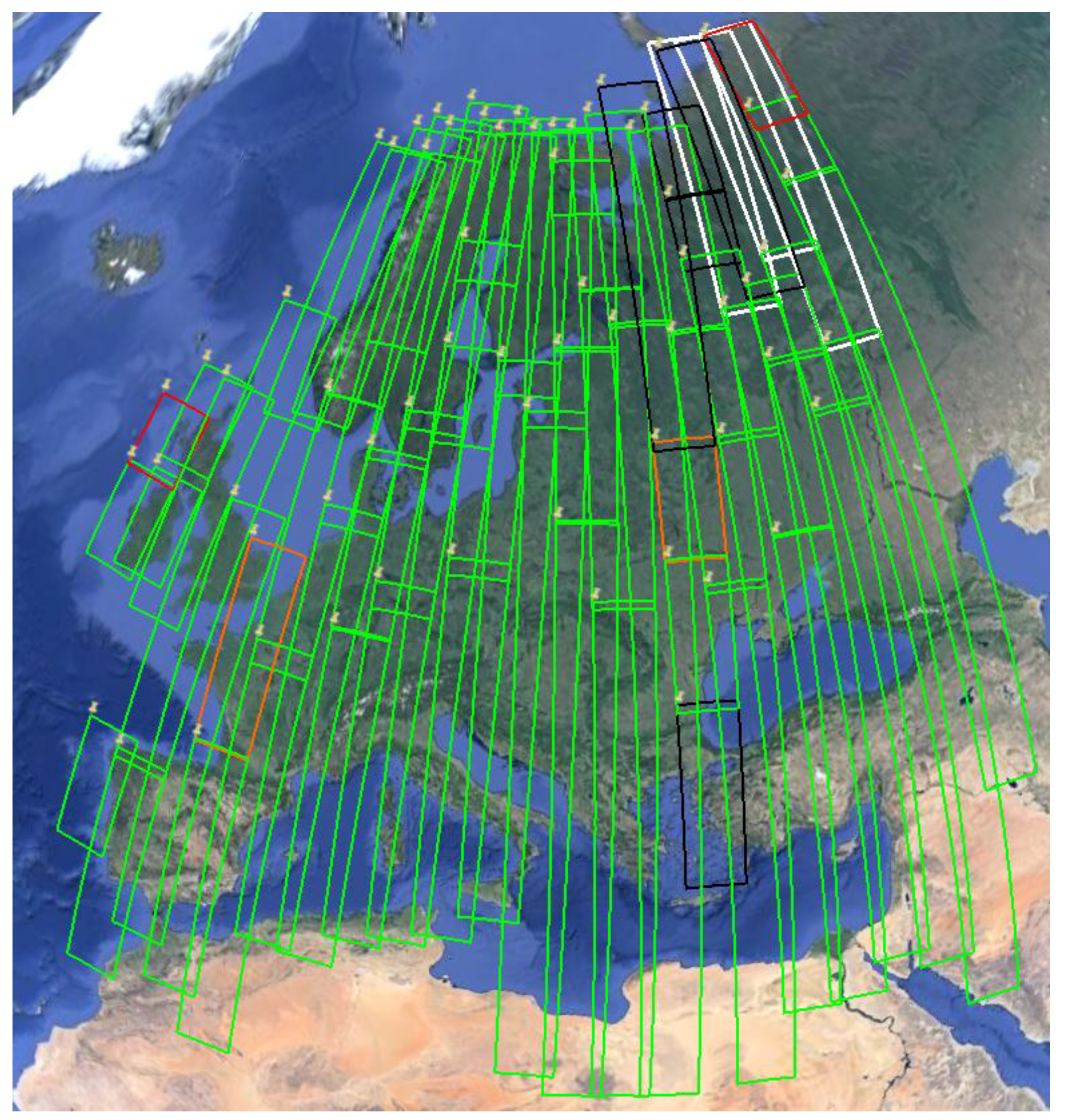
Figure 18.
Monthly evolution of the image selection for the GRI (April to July 2016).
Figure 18.
Monthly evolution of the image selection for the GRI (April to July 2016).
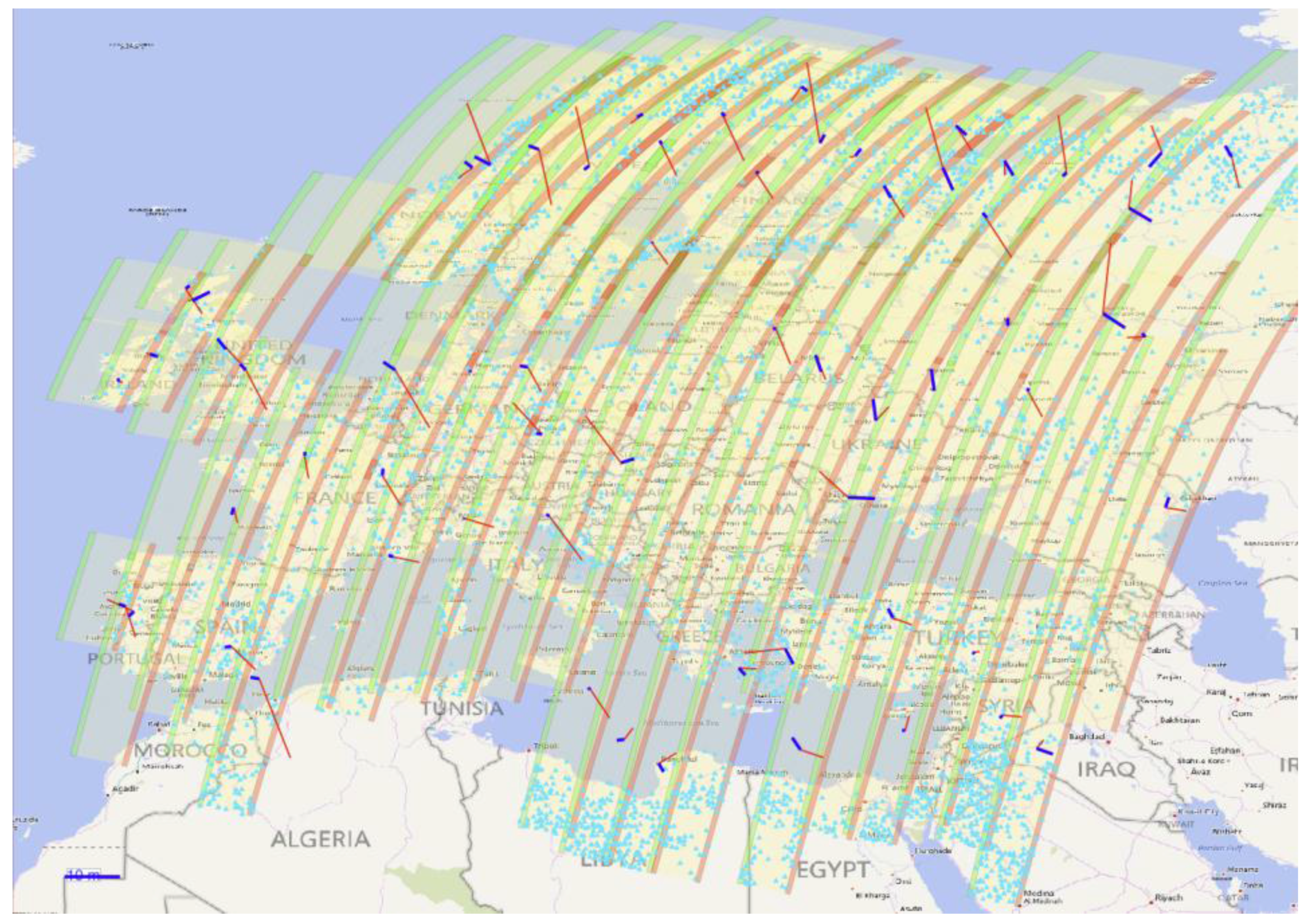
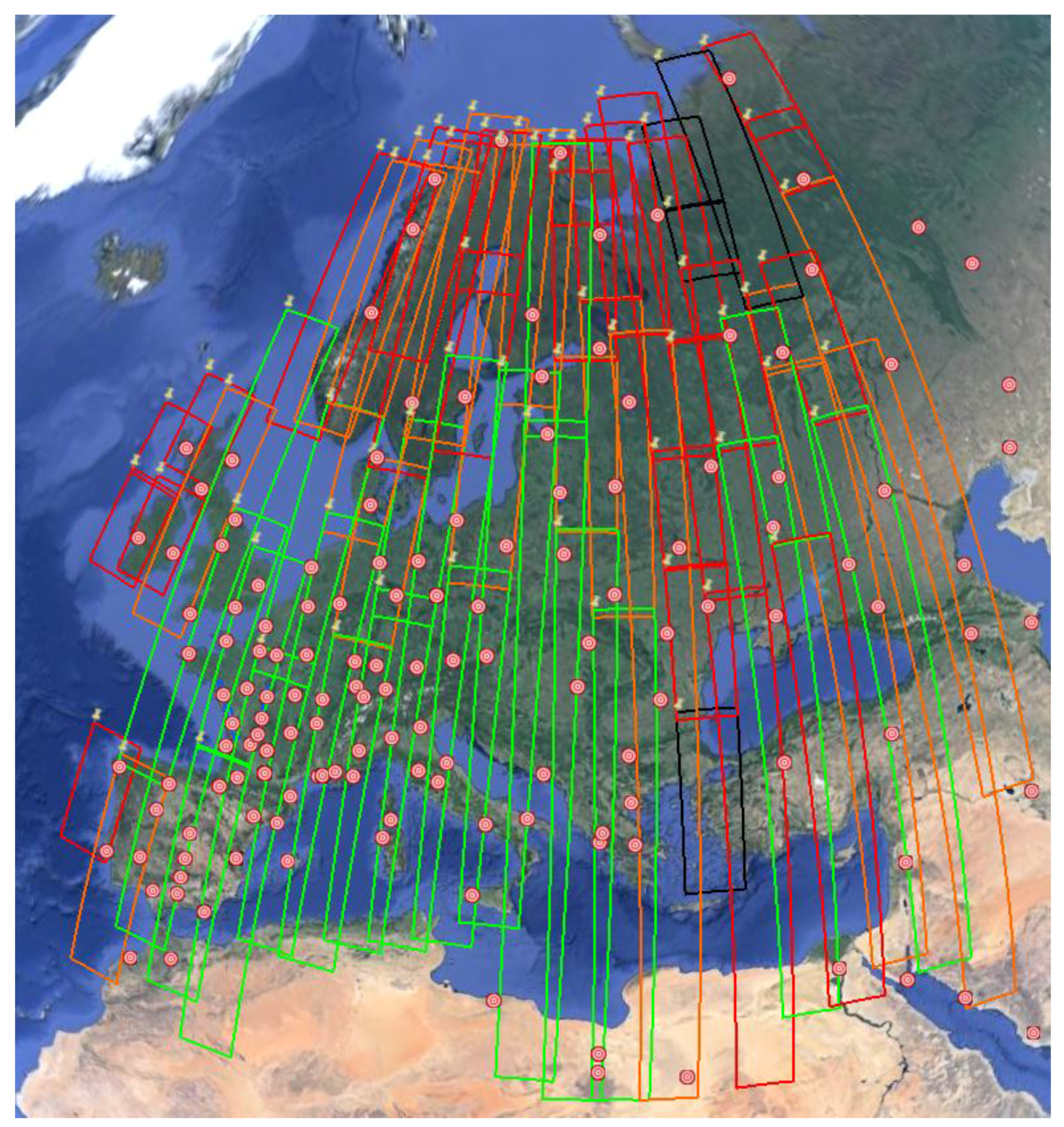
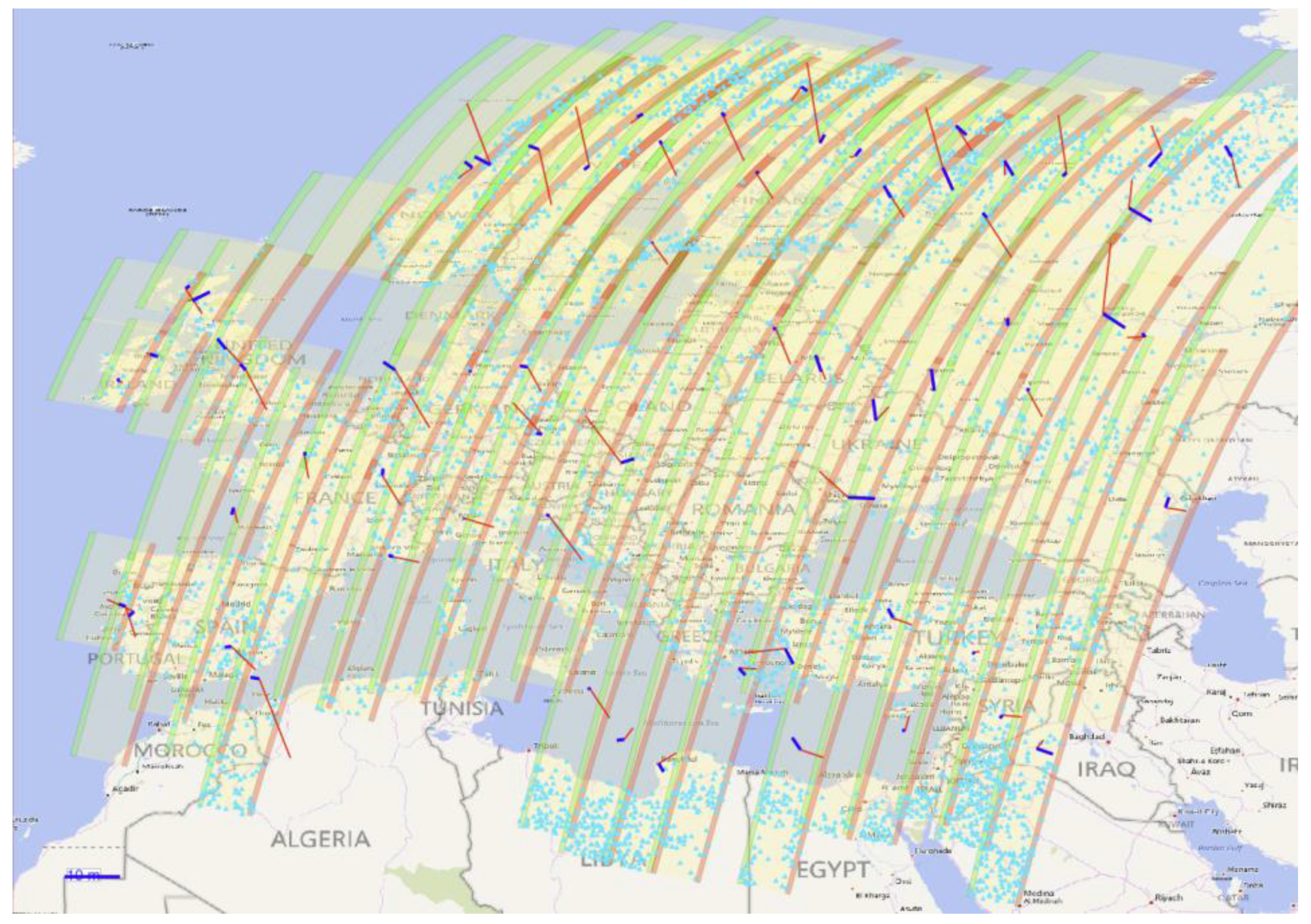
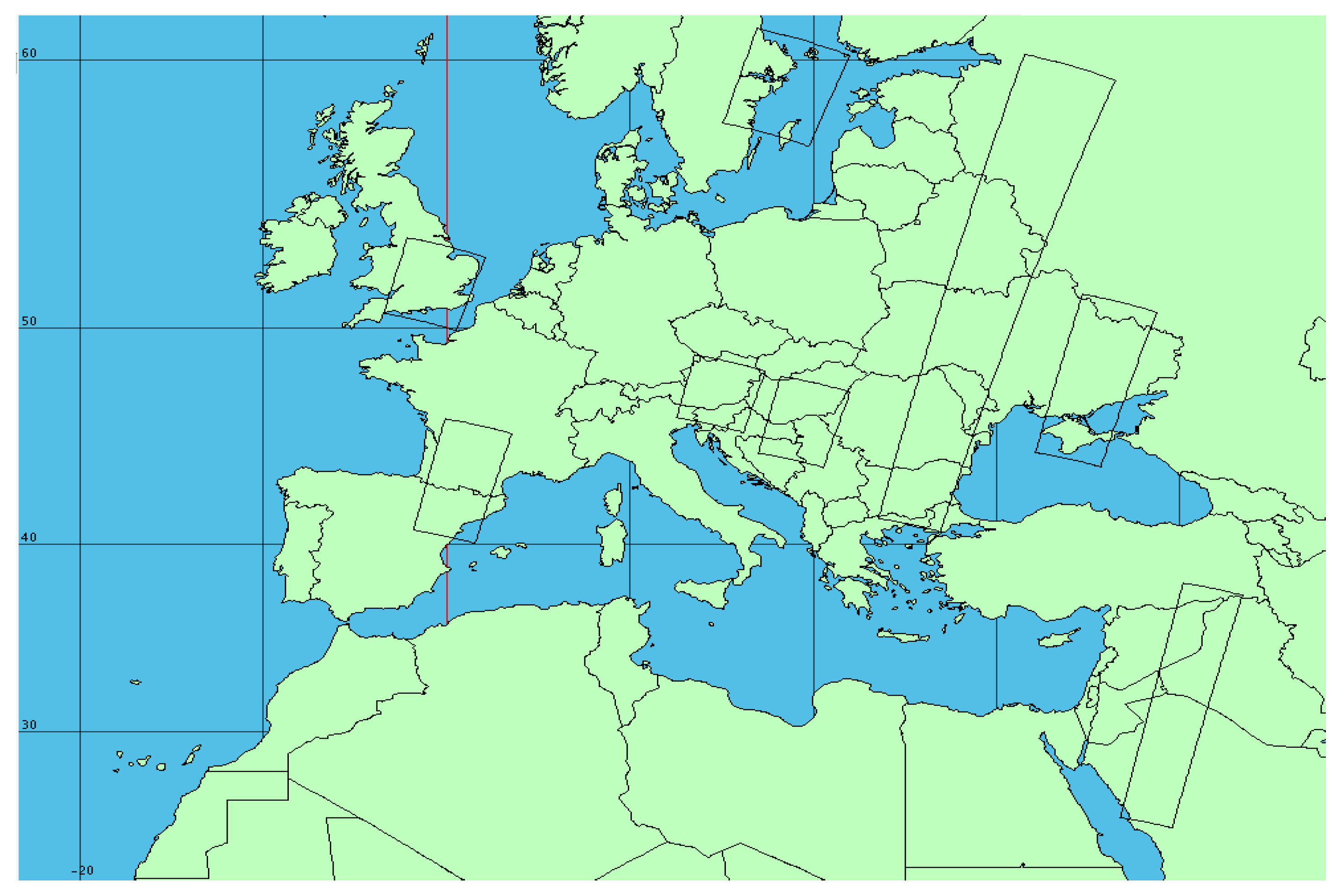
Figure 19.
Checks from Reference 3D®/BDAmer (turquoise markers) data over Europe. Red and blue lines represent error vector of the product before and after refinement.
Figure 19.
Checks from Reference 3D®/BDAmer (turquoise markers) data over Europe. Red and blue lines represent error vector of the product before and after refinement.
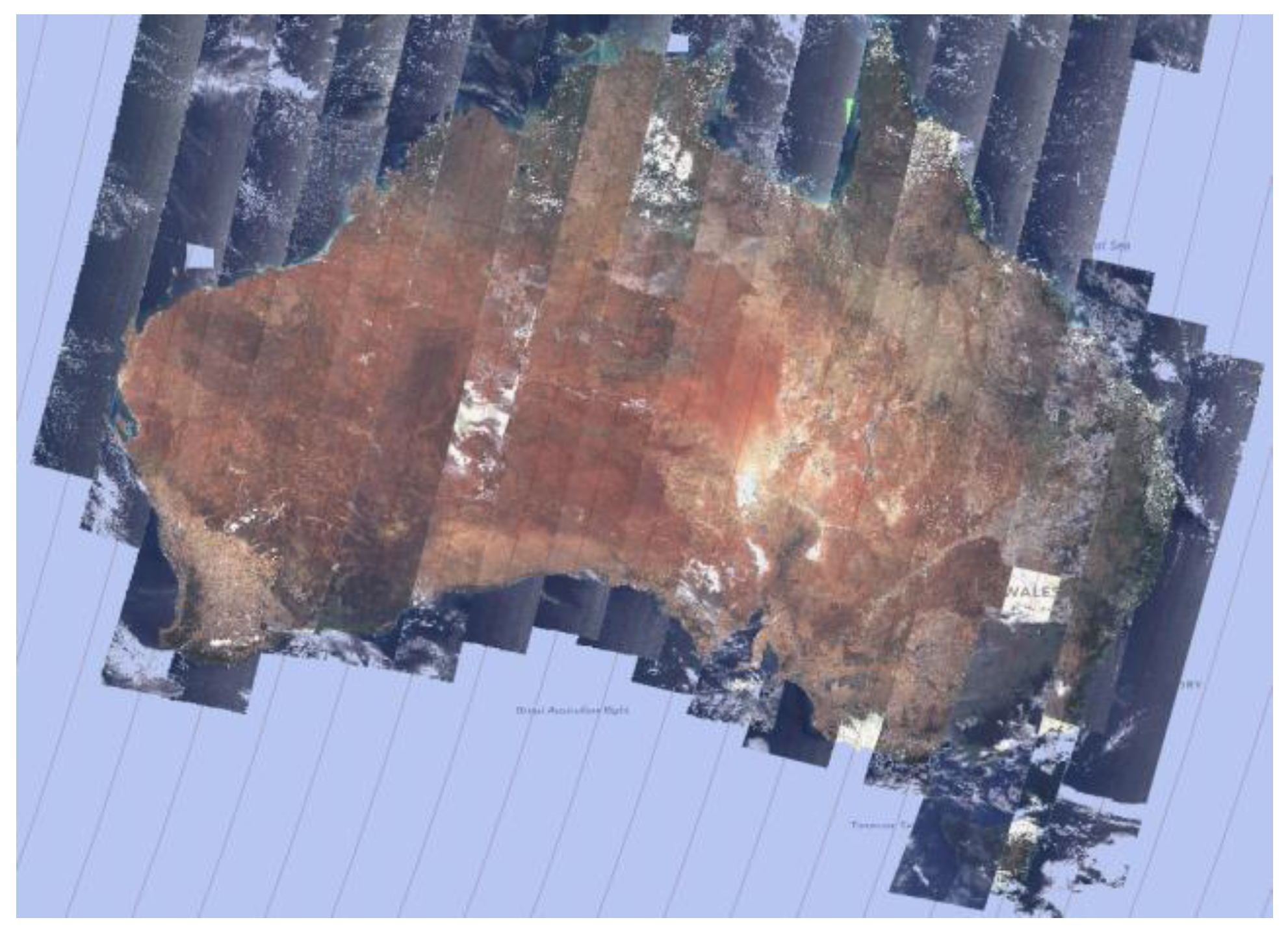
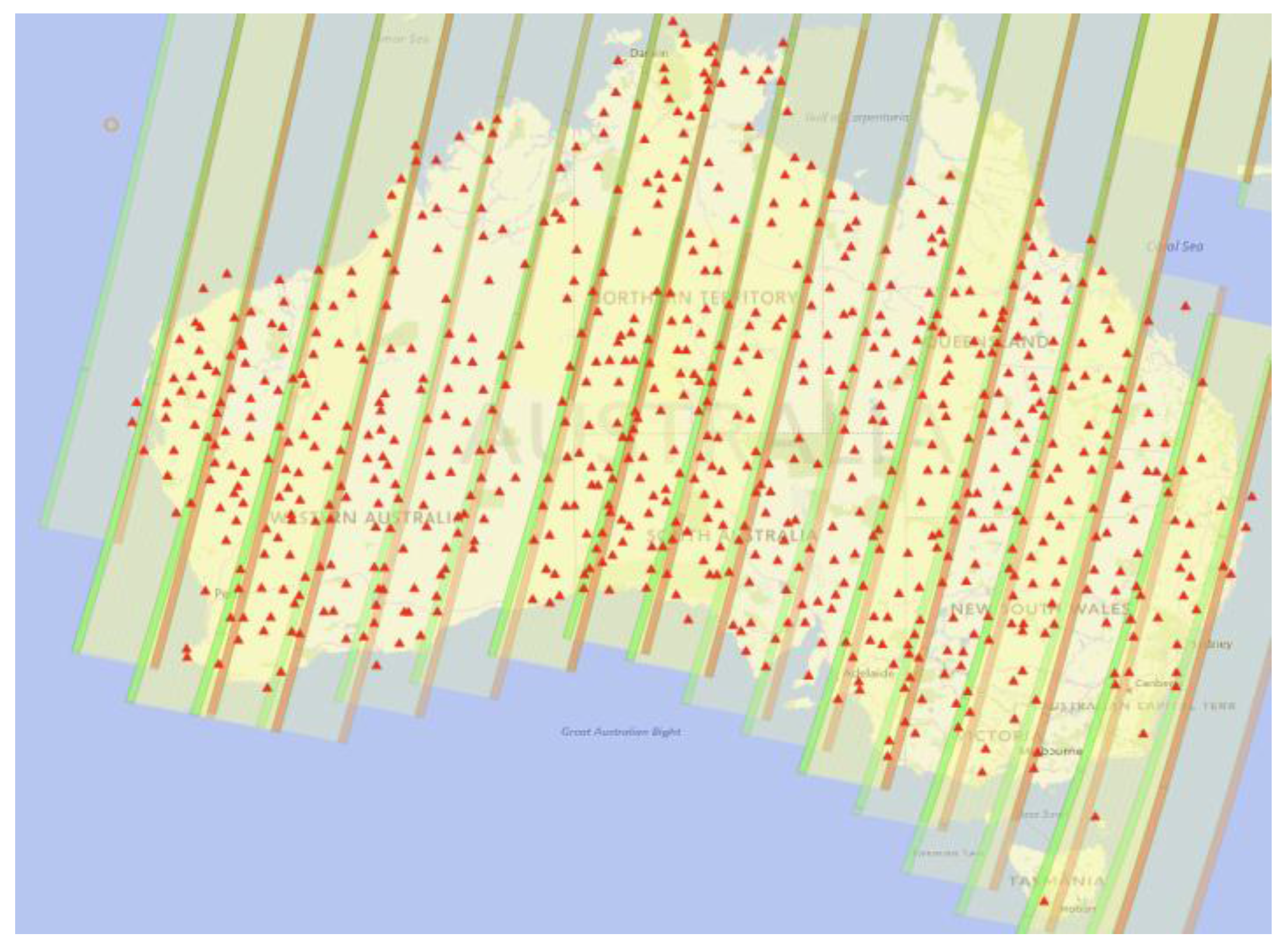
Figure 20.
Selection of 33 products over Australia for the GRI.
Figure 20.
Selection of 33 products over Australia for the GRI.
Figure 21.
Three couples (3 examples over Australia) of homologous points between Sentinel-2 (left) and Australian Geographic Reference Image (AGRI) (right). Each time, the correlation between both images is made at 10m Ground Sample Distance from ground (orthorectified) images.
Figure 21.
Three couples (3 examples over Australia) of homologous points between Sentinel-2 (left) and Australian Geographic Reference Image (AGRI) (right). Each time, the correlation between both images is made at 10m Ground Sample Distance from ground (orthorectified) images.
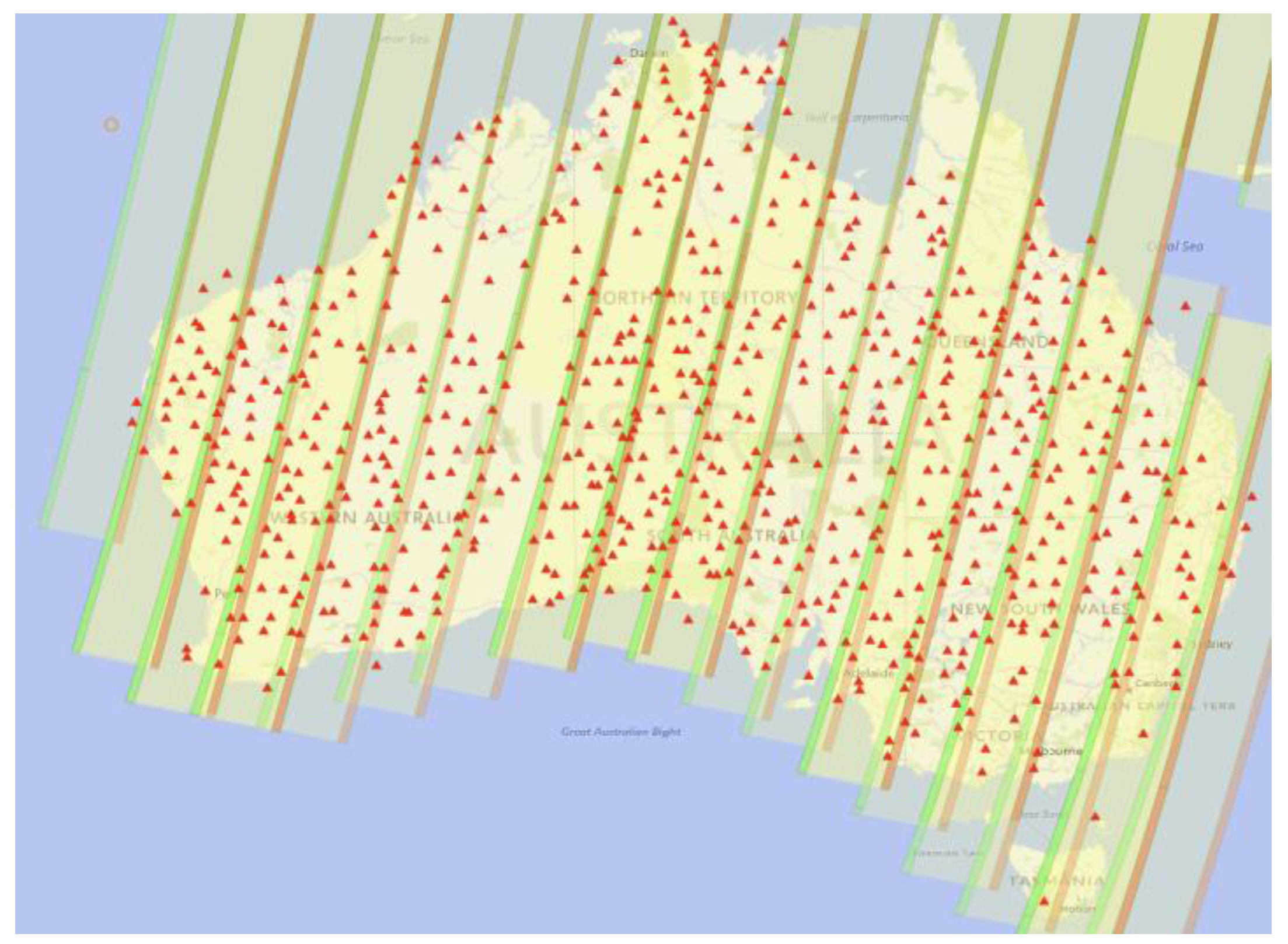
Figure 22.
Repartition of the Ground Control Points (GCPs) extracted from AGRI.
Figure 22.
Repartition of the Ground Control Points (GCPs) extracted from AGRI.
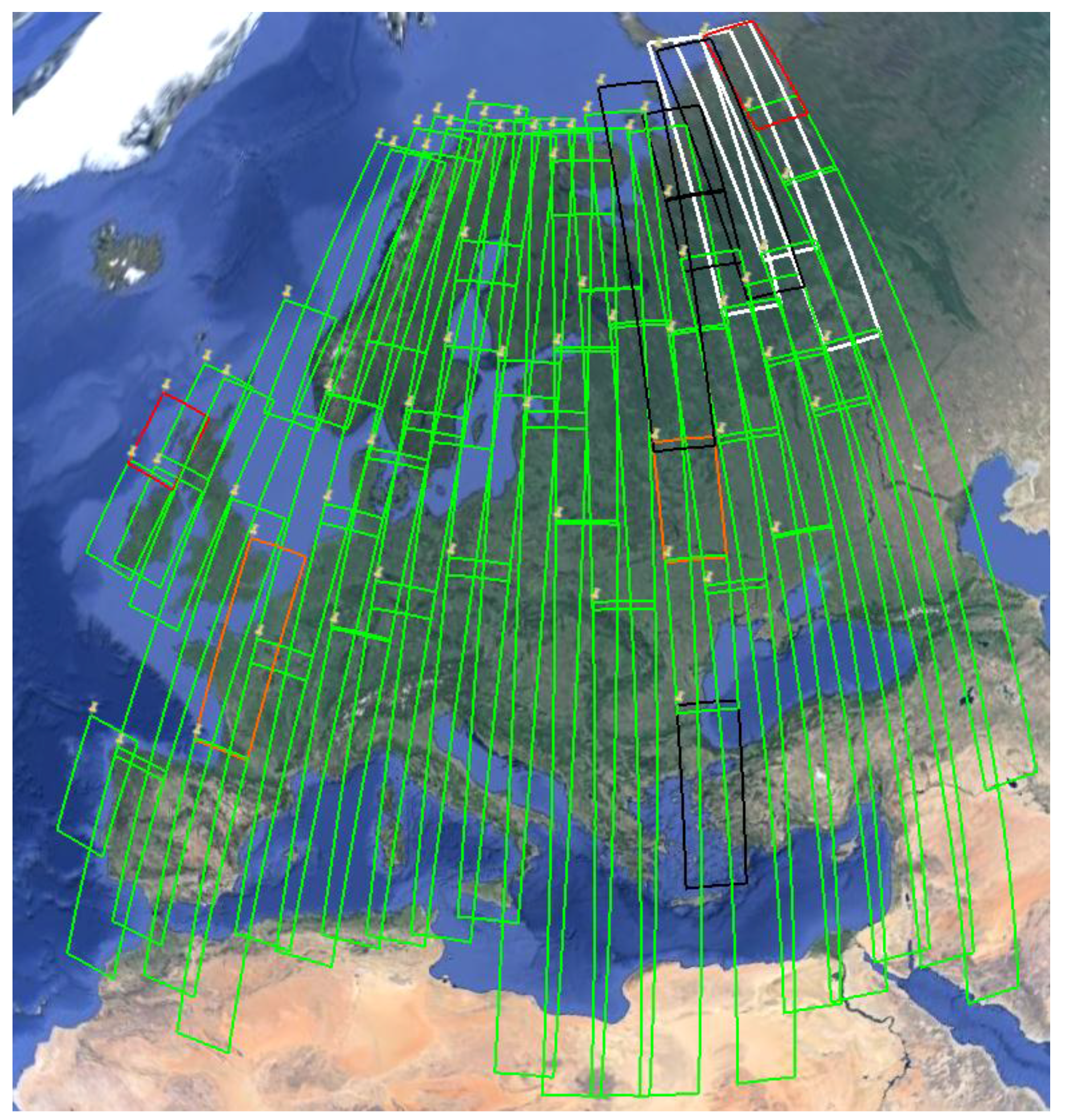
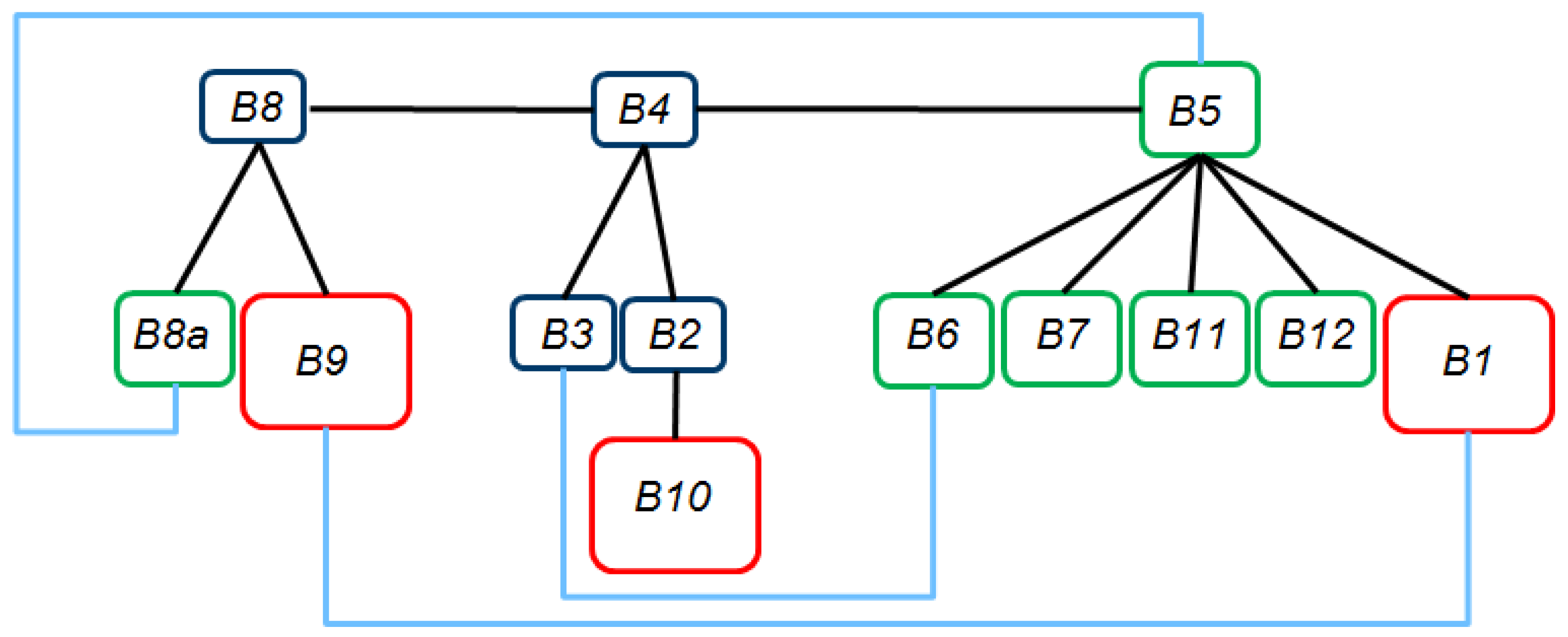
Figure 23.
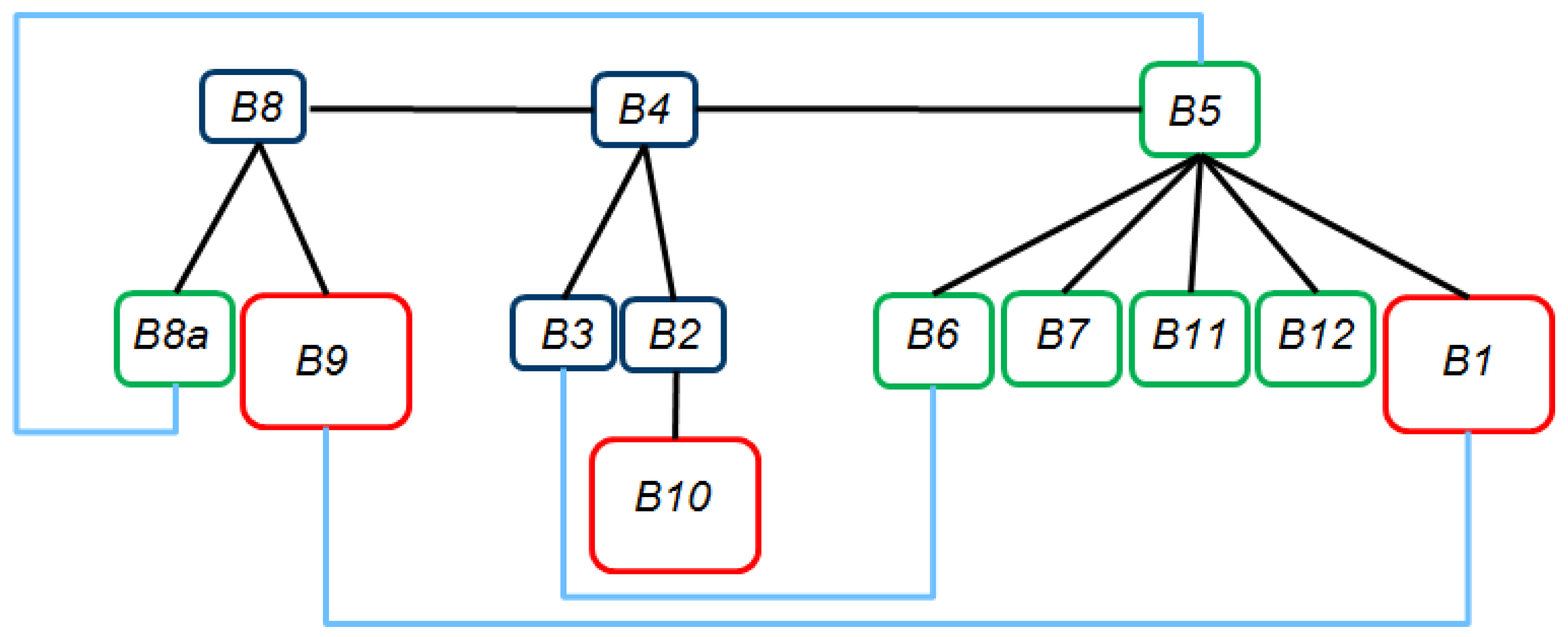
Couples of bands used to perform the multi-spectral registration. Blue boxes: 10 m bands; green boxes: 20 m bands; red boxes: 60 m bands.
Figure 23.
Couples of bands used to perform the multi-spectral registration. Blue boxes: 10 m bands; green boxes: 20 m bands; red boxes: 60 m bands.
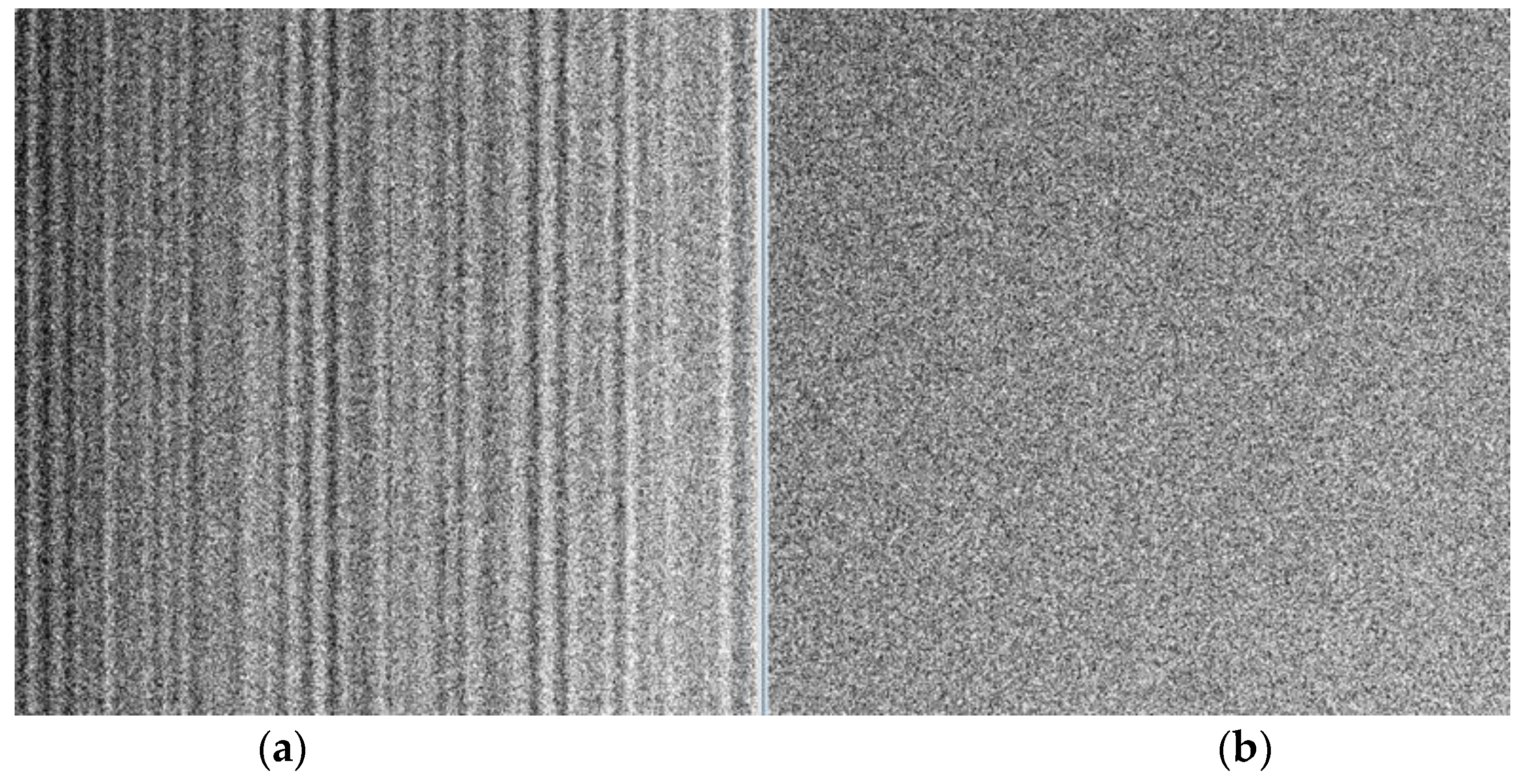
Figure 24.
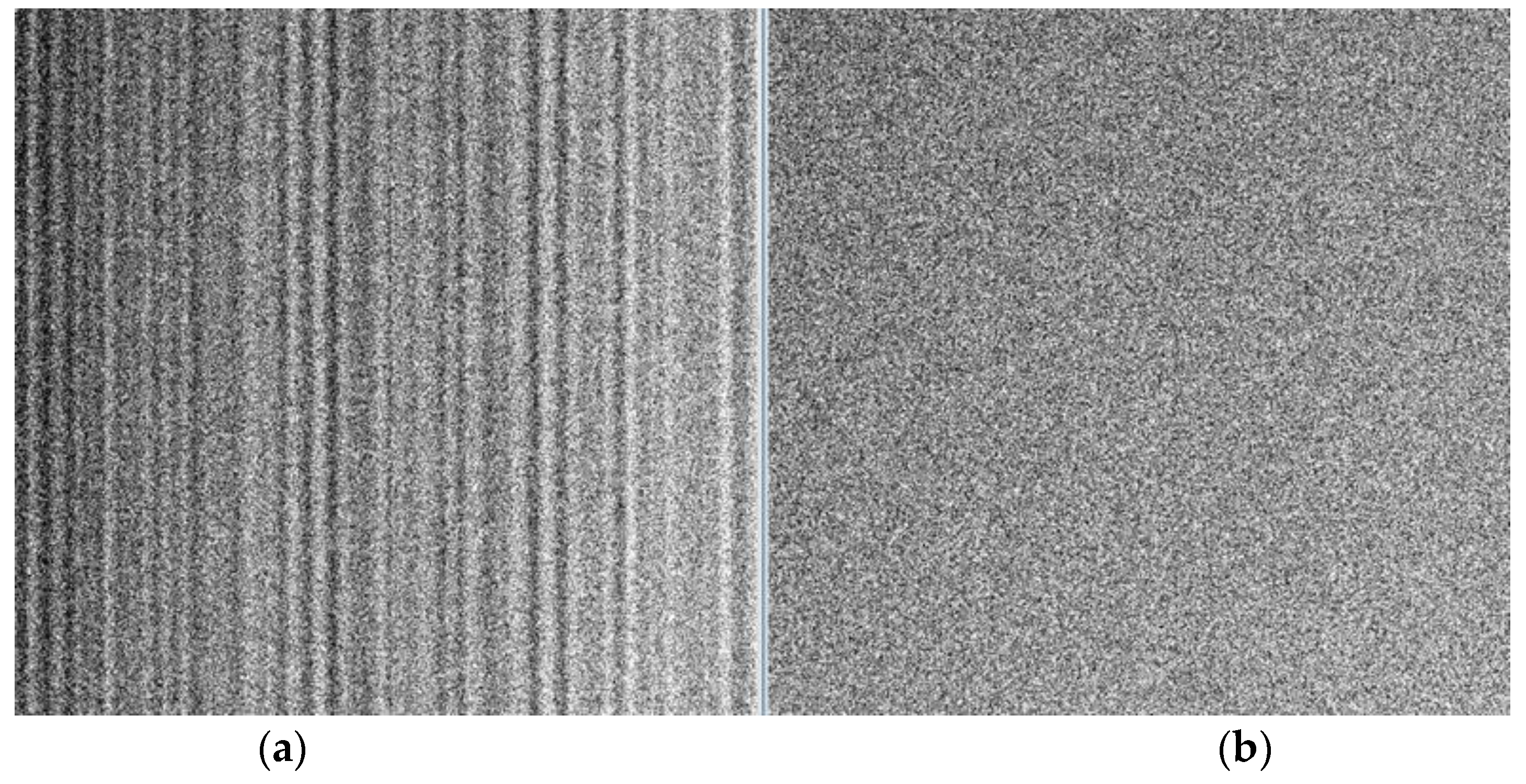
Illustration of image equalisation impact: (a) Non-equalised diffuser image; (b) Equalised diffuser image.
Figure 24.
Illustration of image equalisation impact: (a) Non-equalised diffuser image; (b) Equalised diffuser image.
Figure 25.
General principle for equalisation assessment.
Figure 25.
General principle for equalisation assessment.
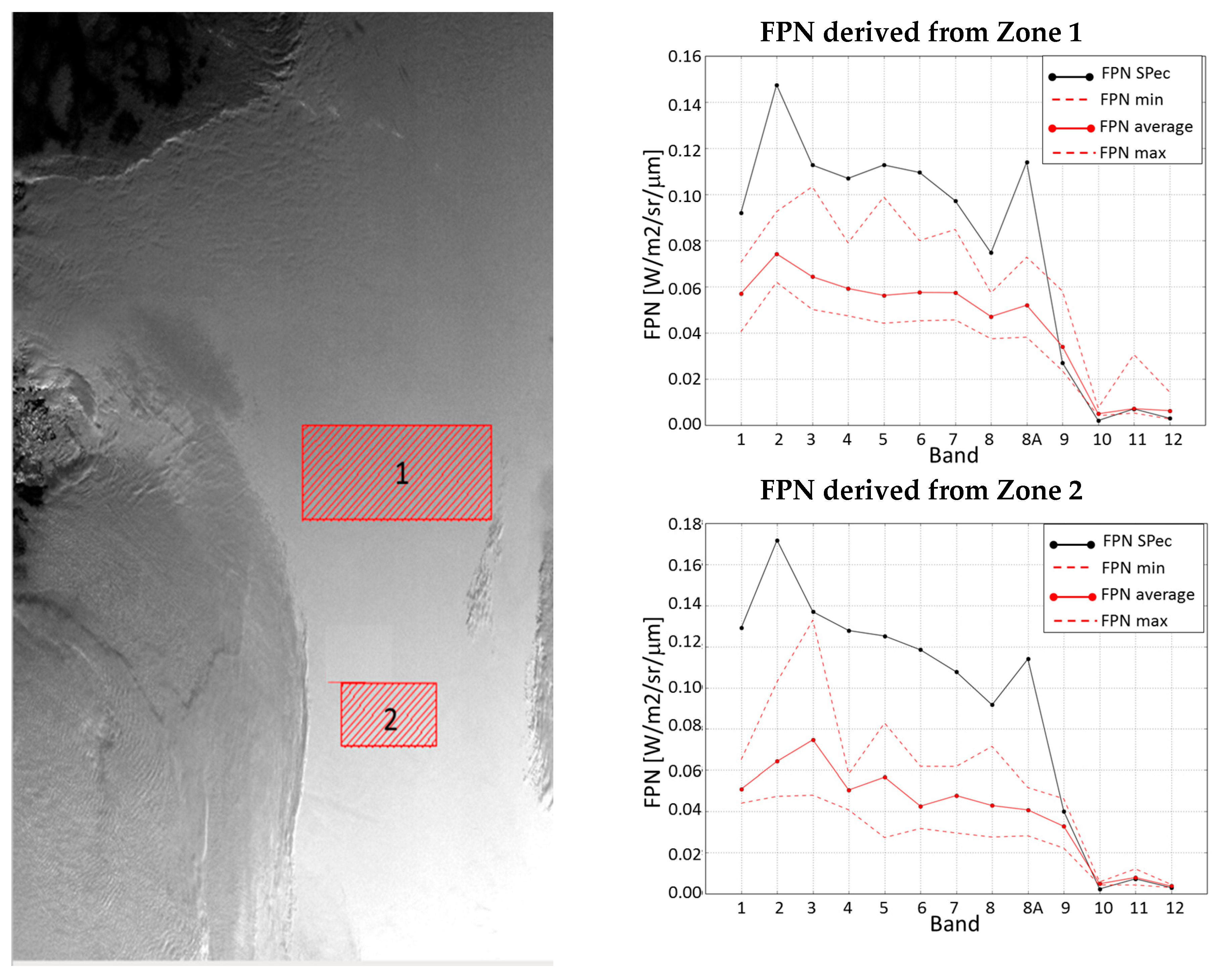
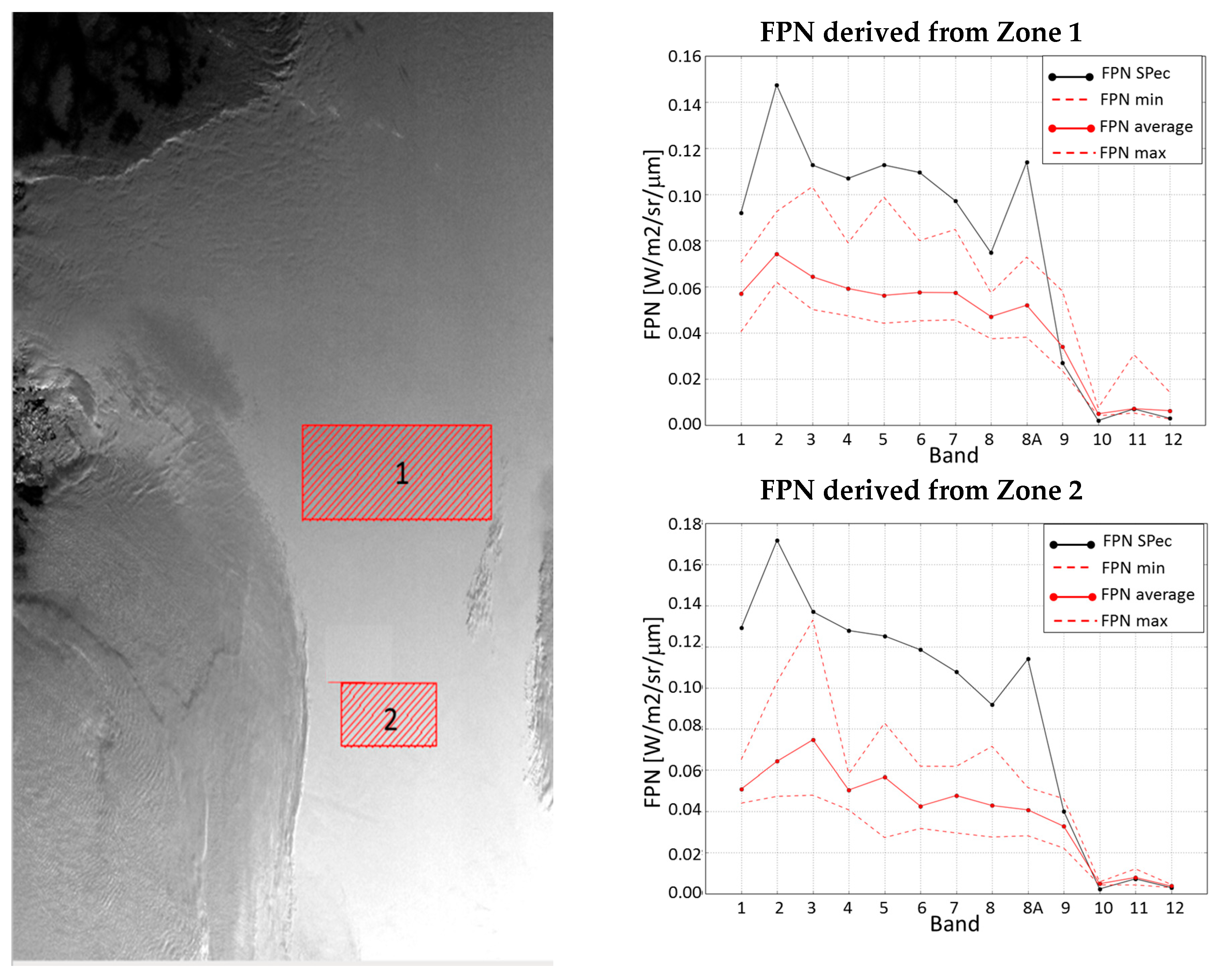
Figure 26.
Left: Sentinel-2 Greenland image from 2015/09/04 together with the 2 uniform zones that are used to estimate the equalization quality. Right: FPN derived independently from the 2 zones.
Figure 26.
Left: Sentinel-2 Greenland image from 2015/09/04 together with the 2 uniform zones that are used to estimate the equalization quality. Right: FPN derived independently from the 2 zones.
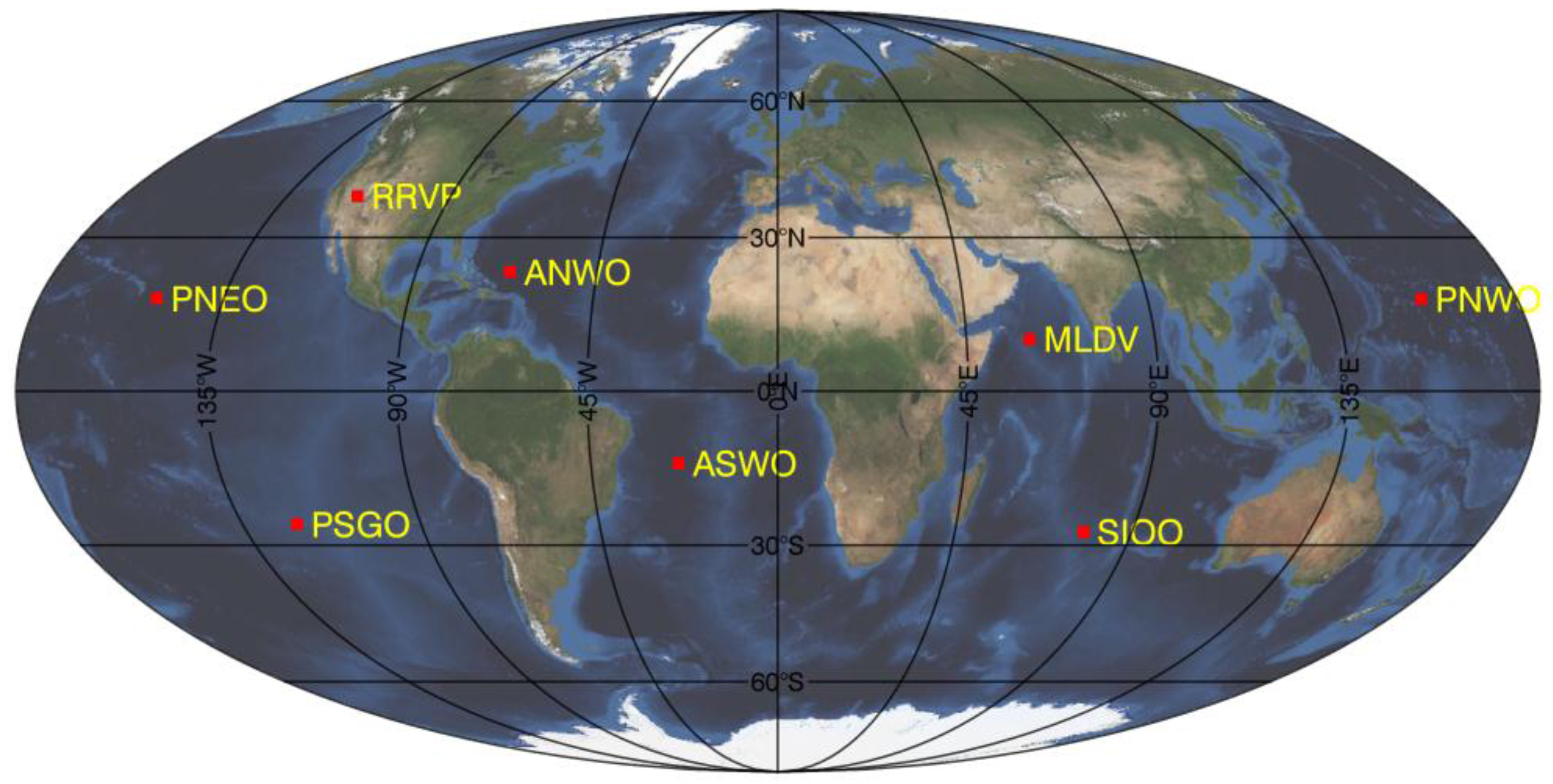
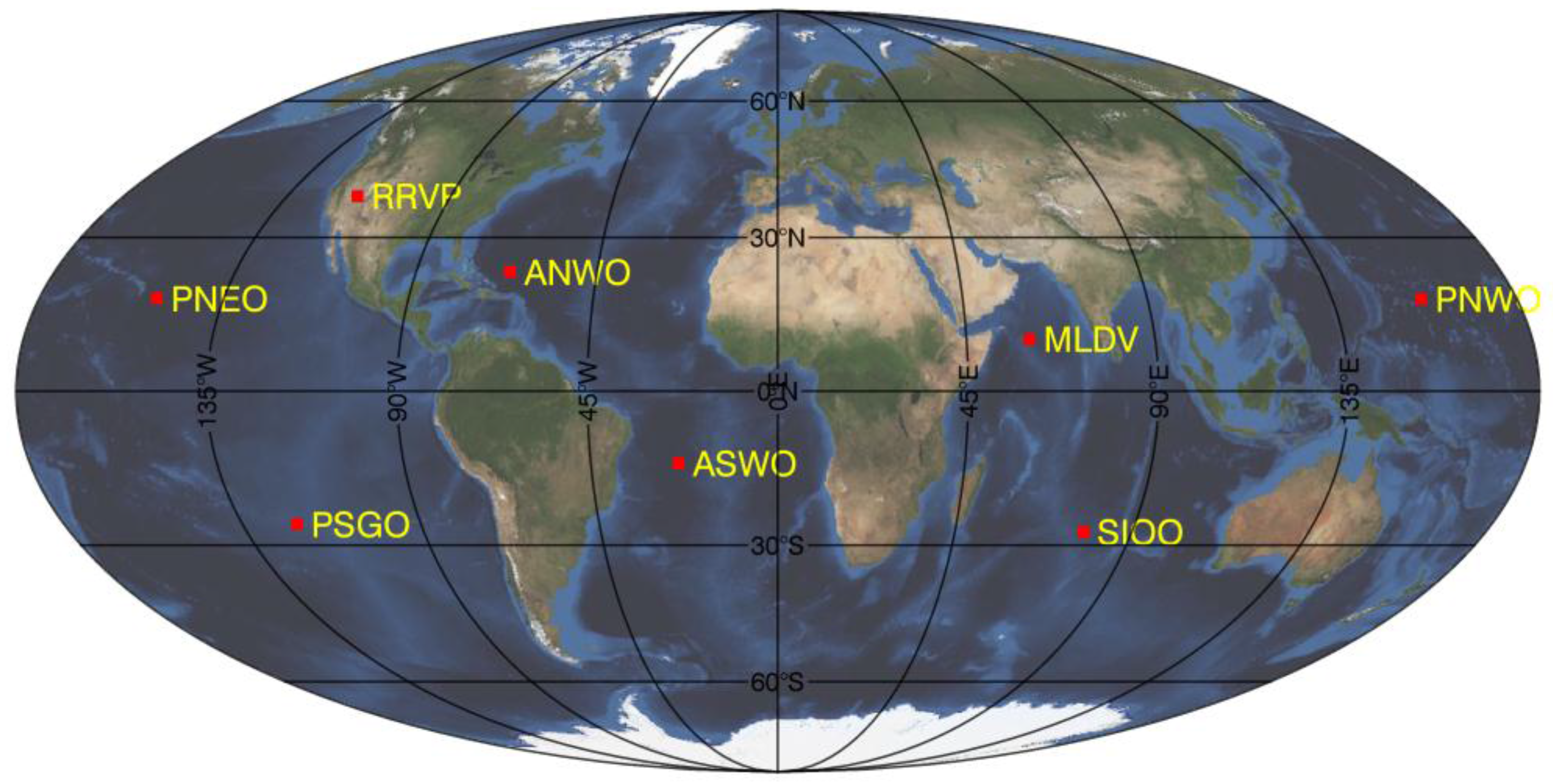
Figure 27.
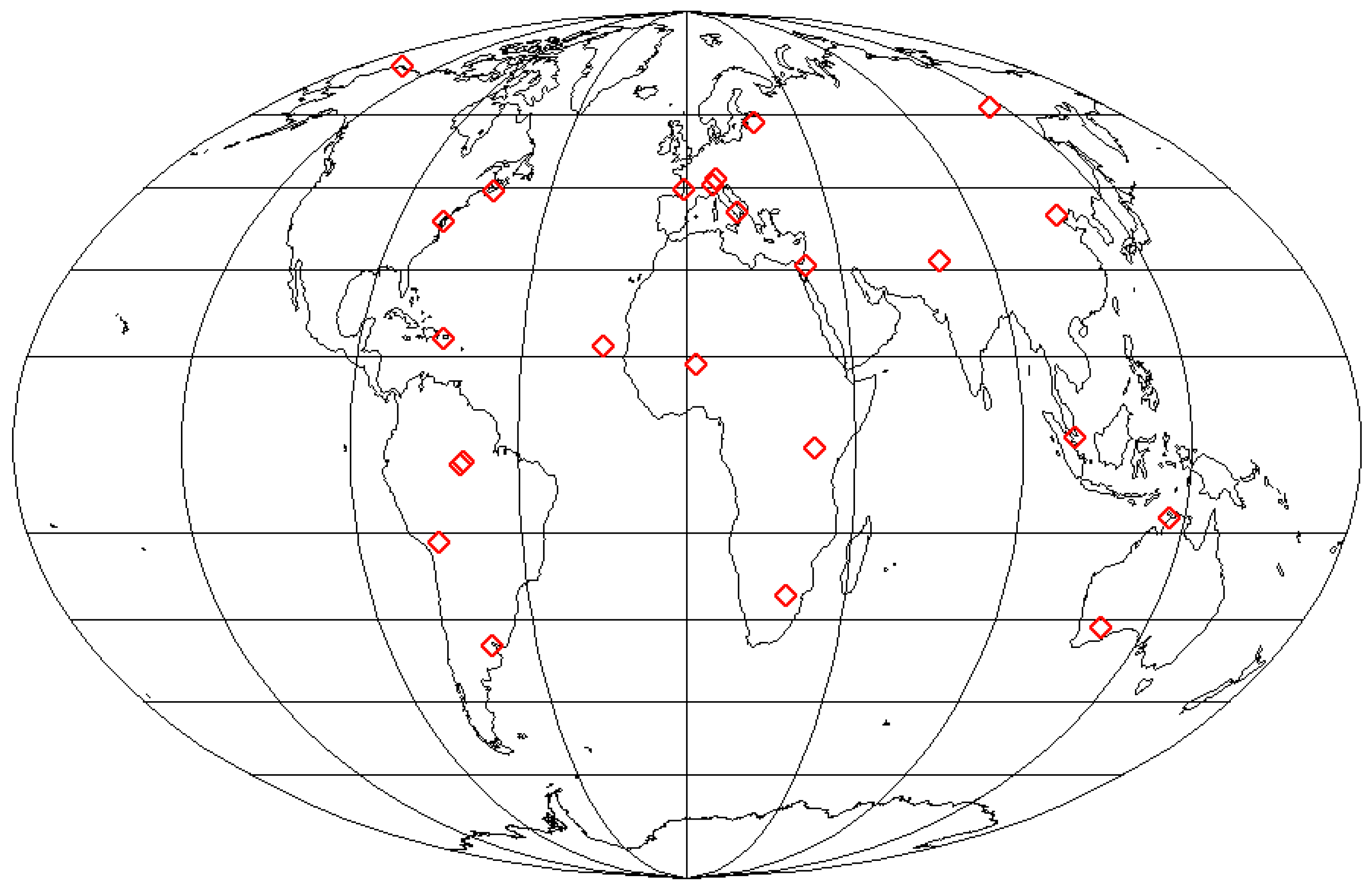
Cal/Val test sites location for Rayleigh scattering, Deep Convective Clouds (DCC), and ground-based methods chosen for Sentinel-2A commissioning activities. ANWO: Atlantic NW-Optimum, ASWO: Atlantic SW-Optimum, PNEO: Pacific NE-Optimum, PNWO: Pacific NW-Optimum, PSGO: Pacific Southern-Gyre-Optimum, SIOO: South-Indian Ocean-Optimum, MLDV: Maldives and RRVP: Rail-Road Valley Playa. (world image is taken from
http://visibleearth.nasa.gov).
Figure 27.
Cal/Val test sites location for Rayleigh scattering, Deep Convective Clouds (DCC), and ground-based methods chosen for Sentinel-2A commissioning activities. ANWO: Atlantic NW-Optimum, ASWO: Atlantic SW-Optimum, PNEO: Pacific NE-Optimum, PNWO: Pacific NW-Optimum, PSGO: Pacific Southern-Gyre-Optimum, SIOO: South-Indian Ocean-Optimum, MLDV: Maldives and RRVP: Rail-Road Valley Playa. (world image is taken from
http://visibleearth.nasa.gov).
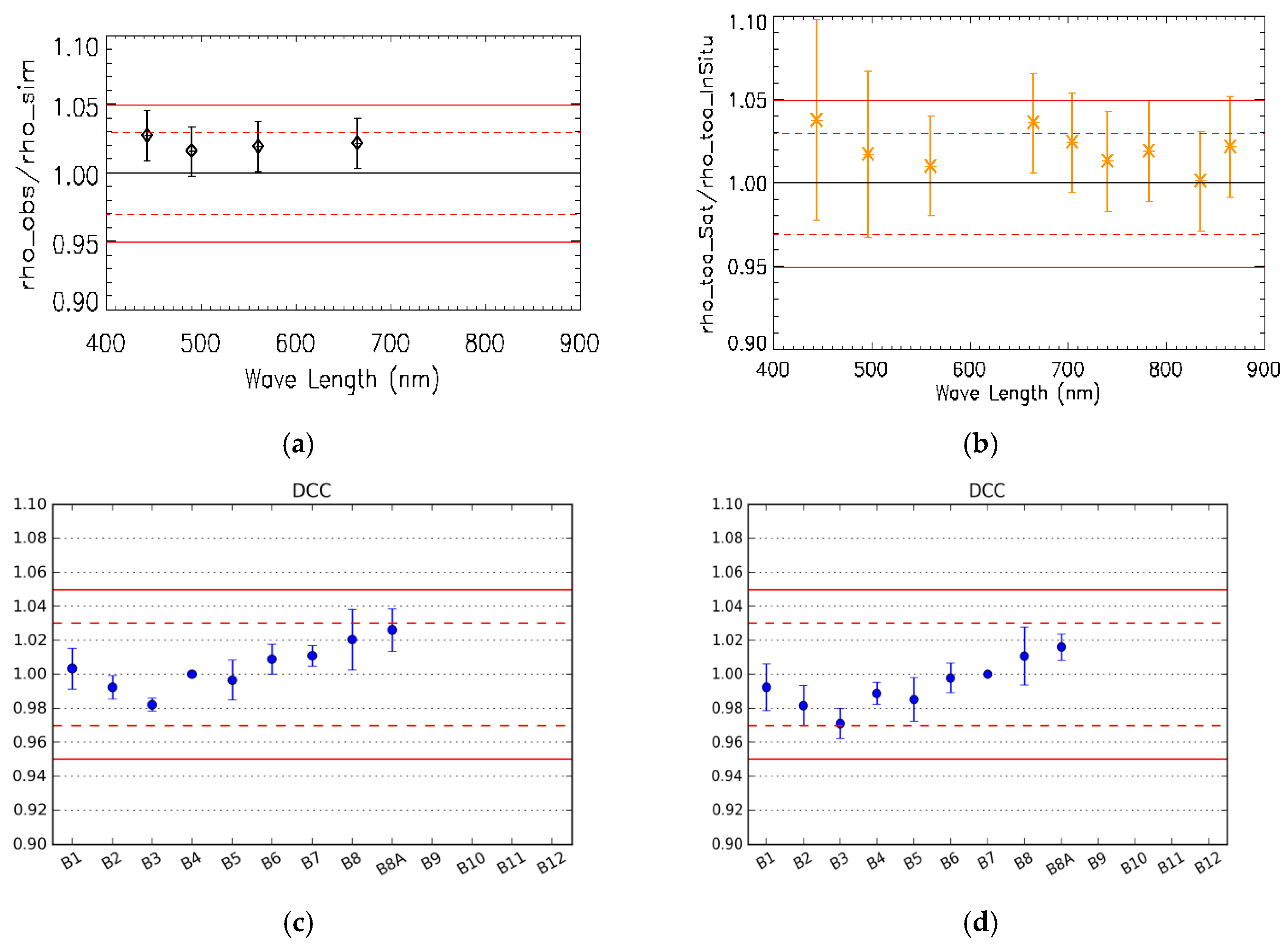
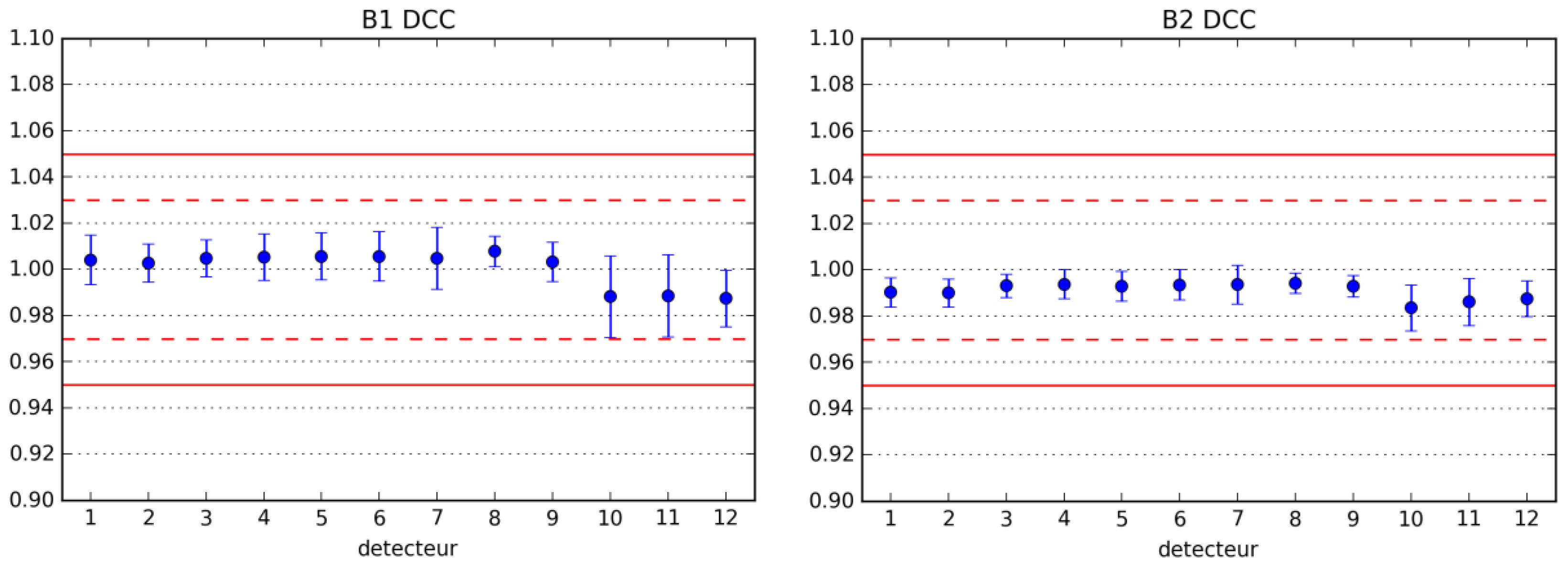
Figure 28.
Calibration results over (a) Rayleigh Scattering; (b) ground-based measurements; (c,d) Deep Convective Clouds. The dashed (resp. solid) red lines represent the 3% goal specification (resp. 5% threshold specification). The reference band is B04 and B07 for (c,d) respectively. Error bars indicate the estimated uncertainty for Rayleigh and ground-based measurements and the standard deviation for the DCC method.
Figure 28.
Calibration results over (a) Rayleigh Scattering; (b) ground-based measurements; (c,d) Deep Convective Clouds. The dashed (resp. solid) red lines represent the 3% goal specification (resp. 5% threshold specification). The reference band is B04 and B07 for (c,d) respectively. Error bars indicate the estimated uncertainty for Rayleigh and ground-based measurements and the standard deviation for the DCC method.
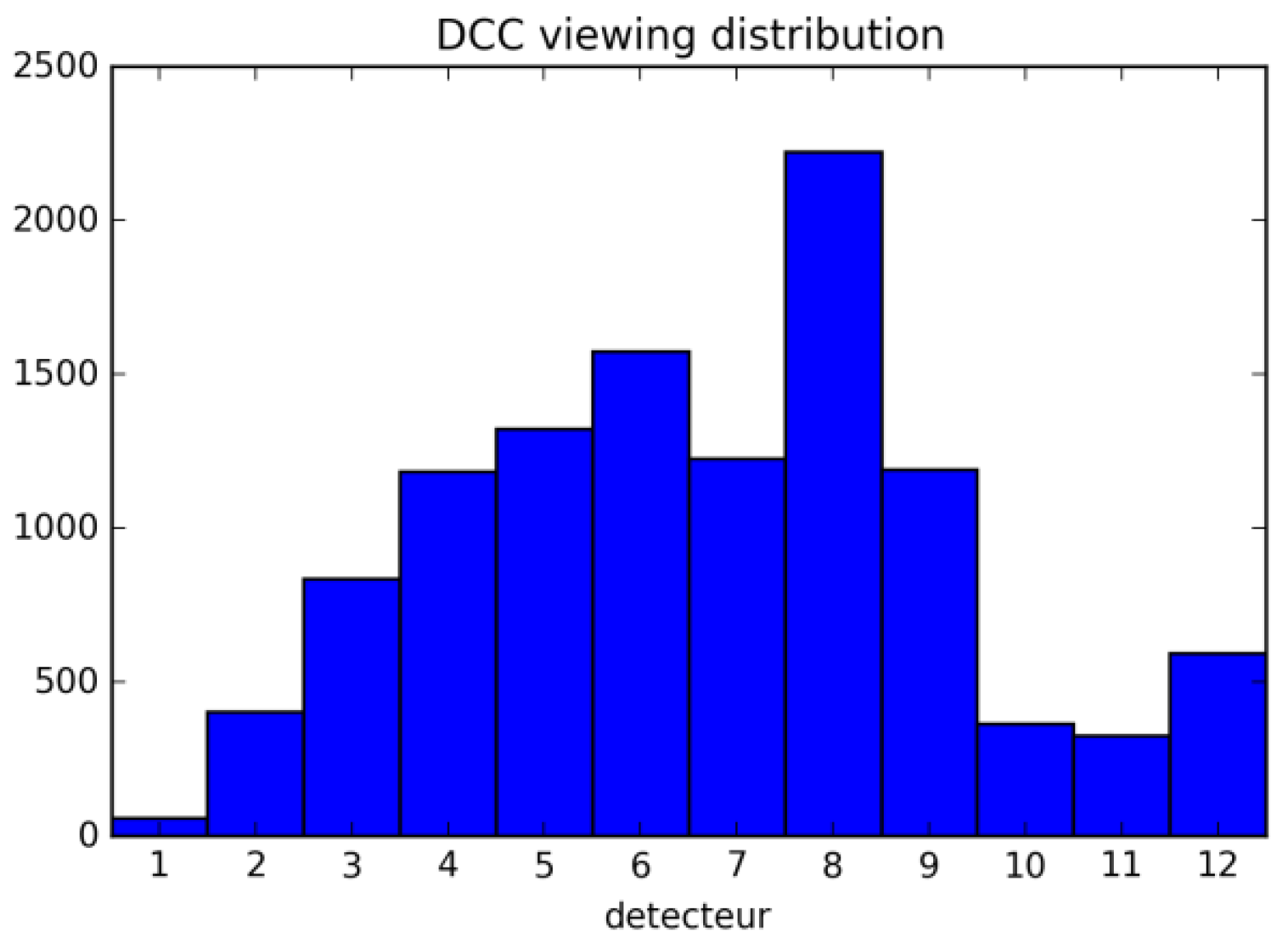
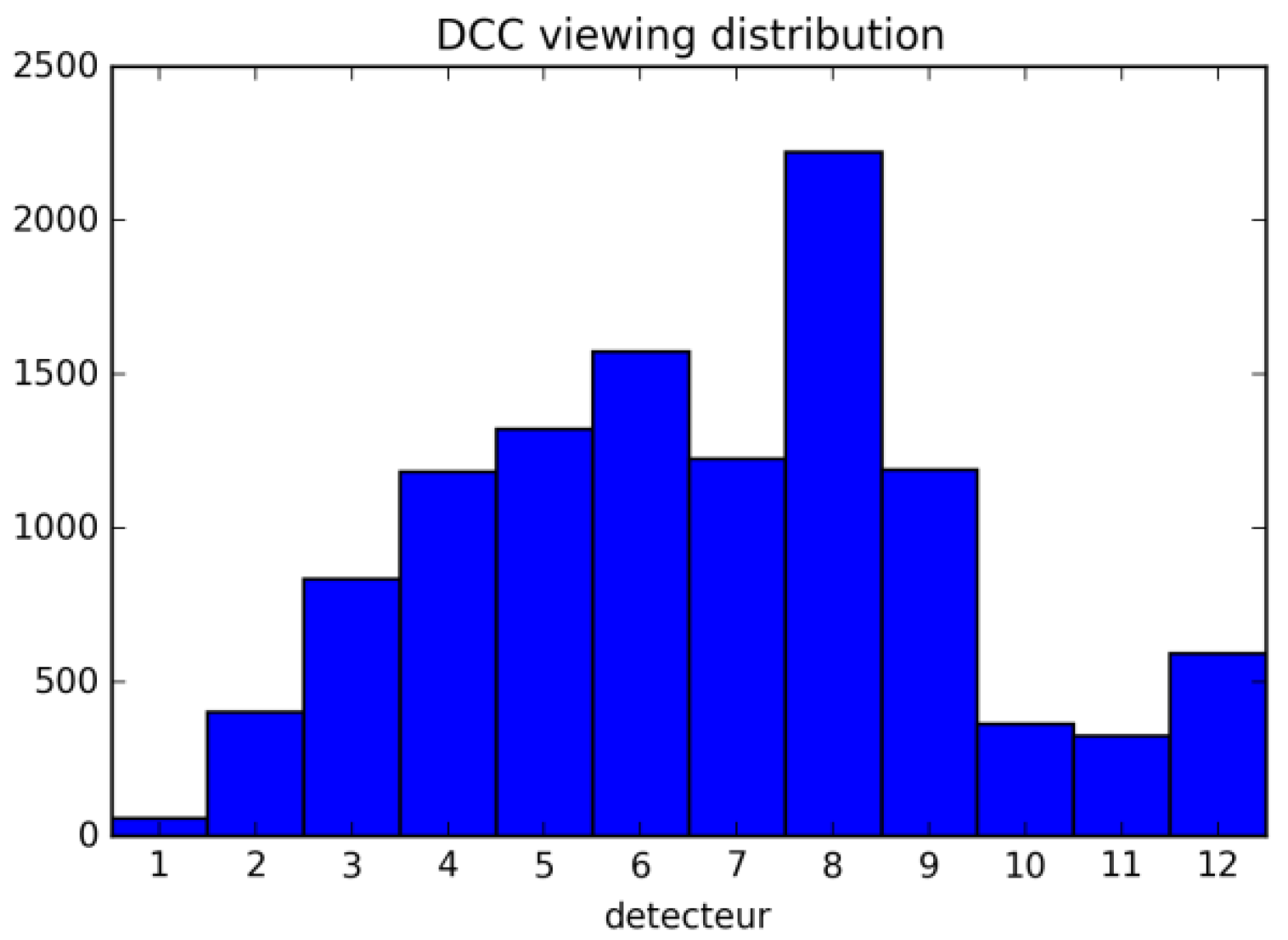
Figure 29.
Distribution of valid measurements over DCC sites as a function of detector number. The detector-1 corresponds to the West edge of the swath.
Figure 29.
Distribution of valid measurements over DCC sites as a function of detector number. The detector-1 corresponds to the West edge of the swath.
Figure 30.
B01 (left) and B02 (right) inter-band calibration coefficients with respect to B04 as a reference band as a function of the detector number, based on Sentinel-2 images calibrated using the diffuser.
Figure 30.
B01 (left) and B02 (right) inter-band calibration coefficients with respect to B04 as a reference band as a function of the detector number, based on Sentinel-2 images calibrated using the diffuser.
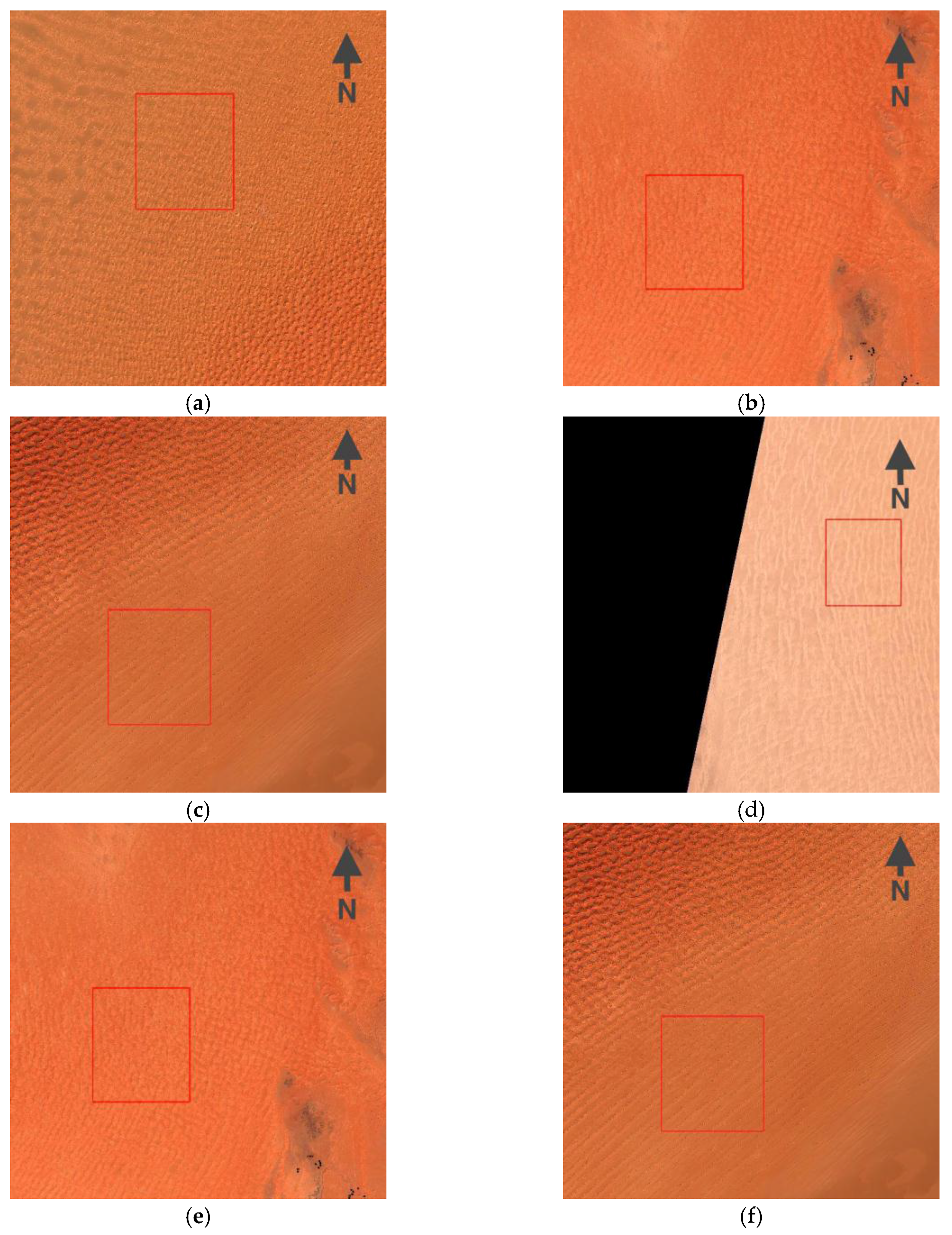
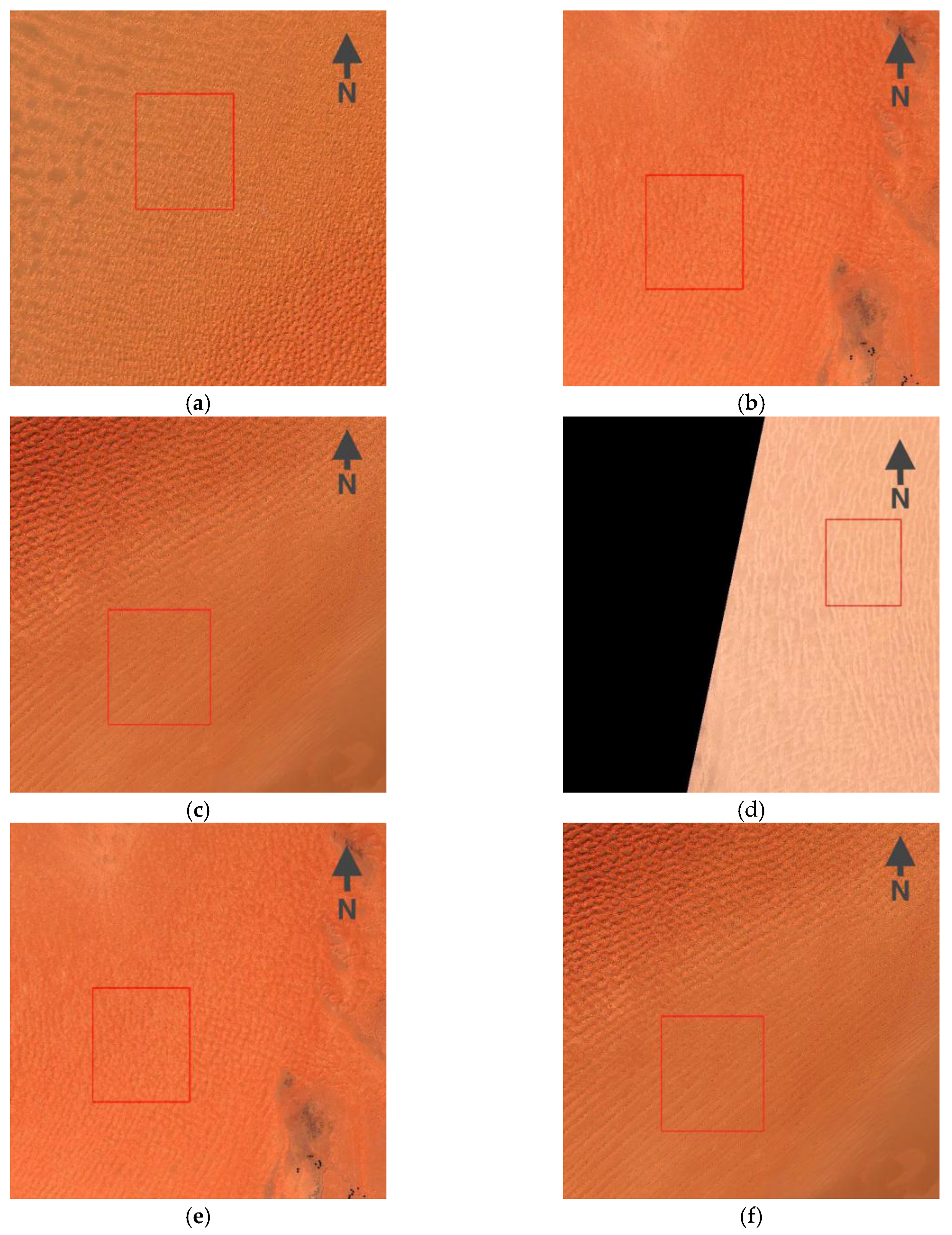
Figure 31.
RGB Quick-Looks from S2A/MSI over (a) Algeria3, (b) Algeria5, (c) Libya1, (d) Libya4, (e) Mauritania1, and (f) Mauritania2 sites. Red squares indicate the region of interest (ROI).
Figure 31.
RGB Quick-Looks from S2A/MSI over (a) Algeria3, (b) Algeria5, (c) Libya1, (d) Libya4, (e) Mauritania1, and (f) Mauritania2 sites. Red squares indicate the region of interest (ROI).
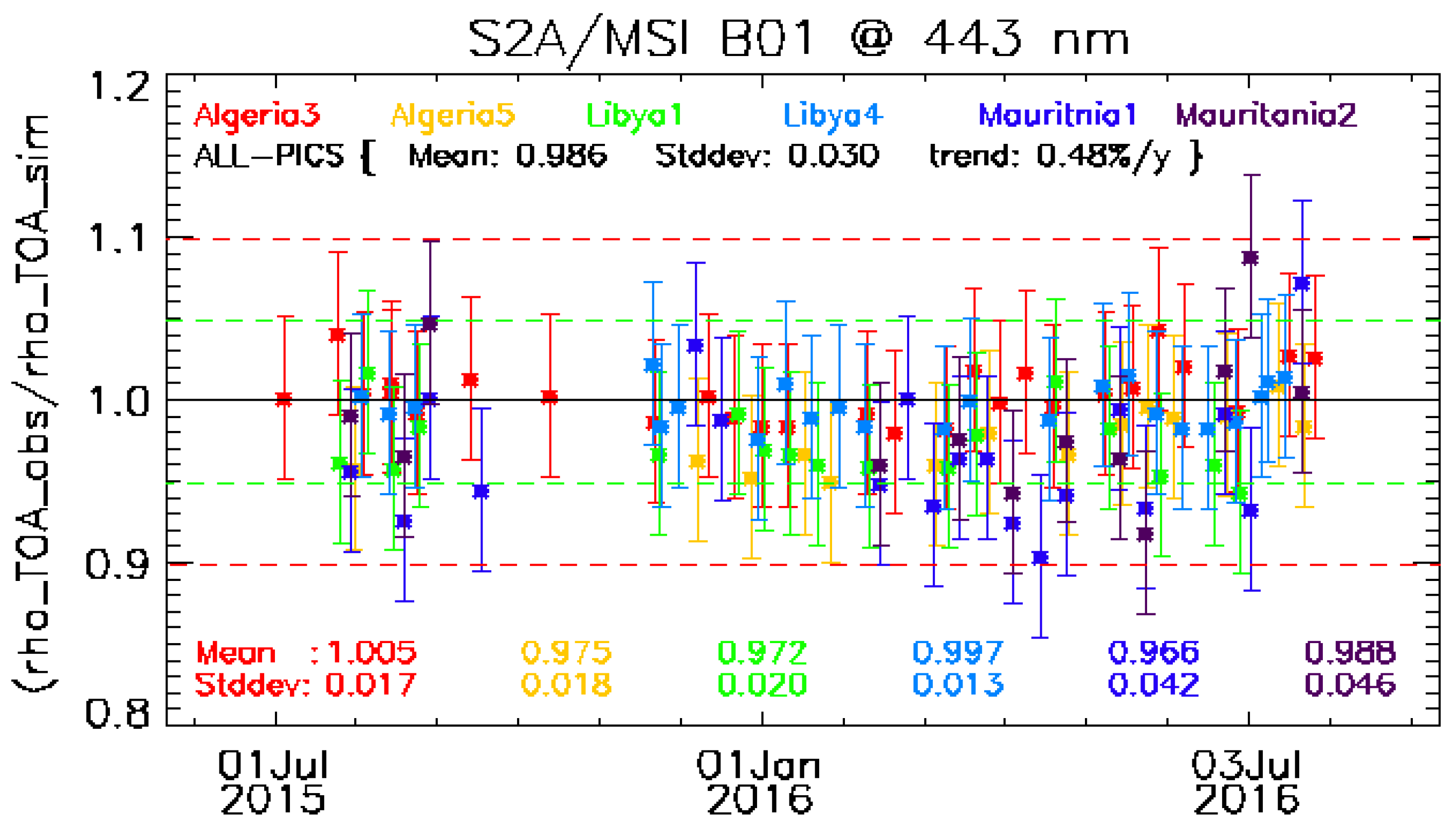
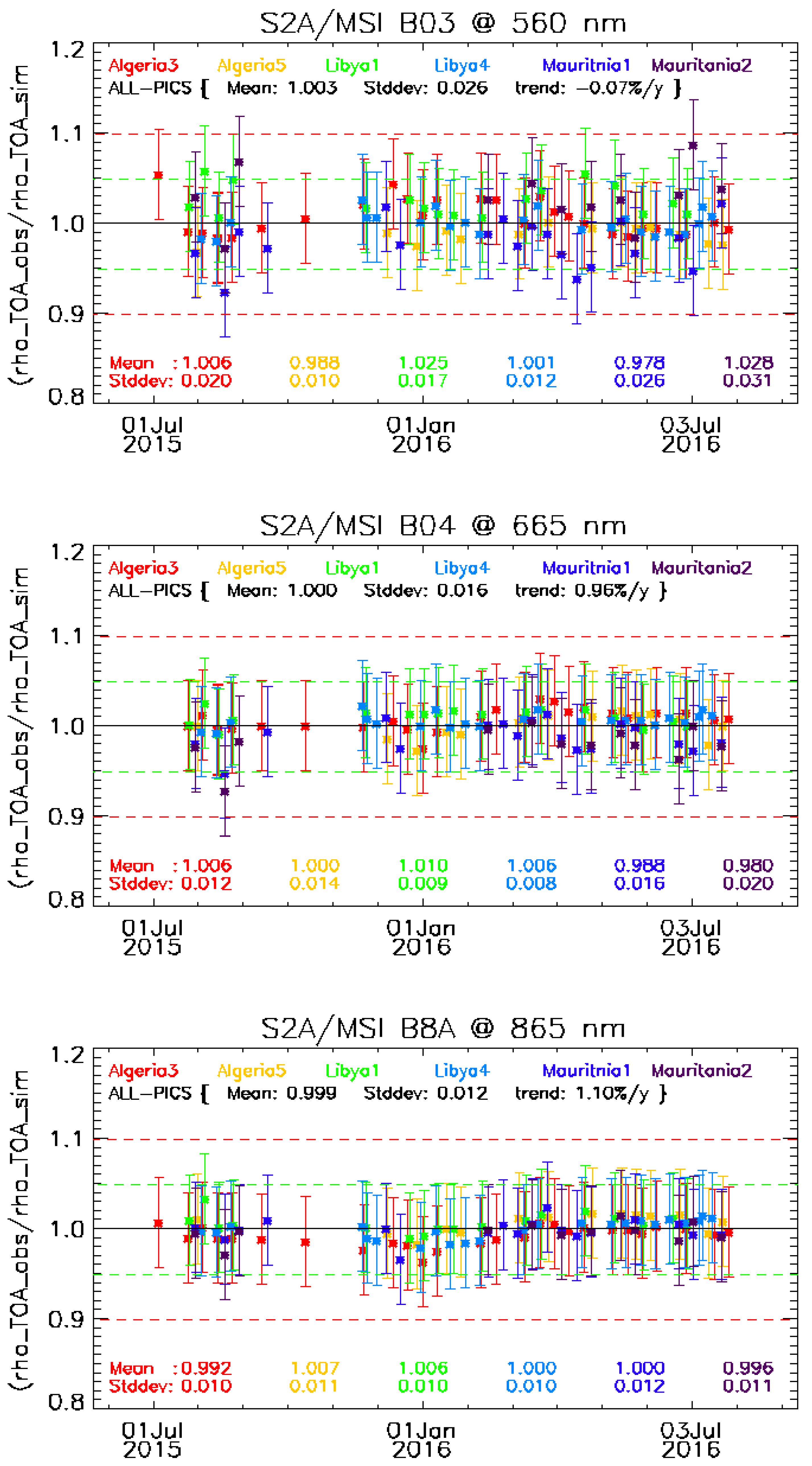
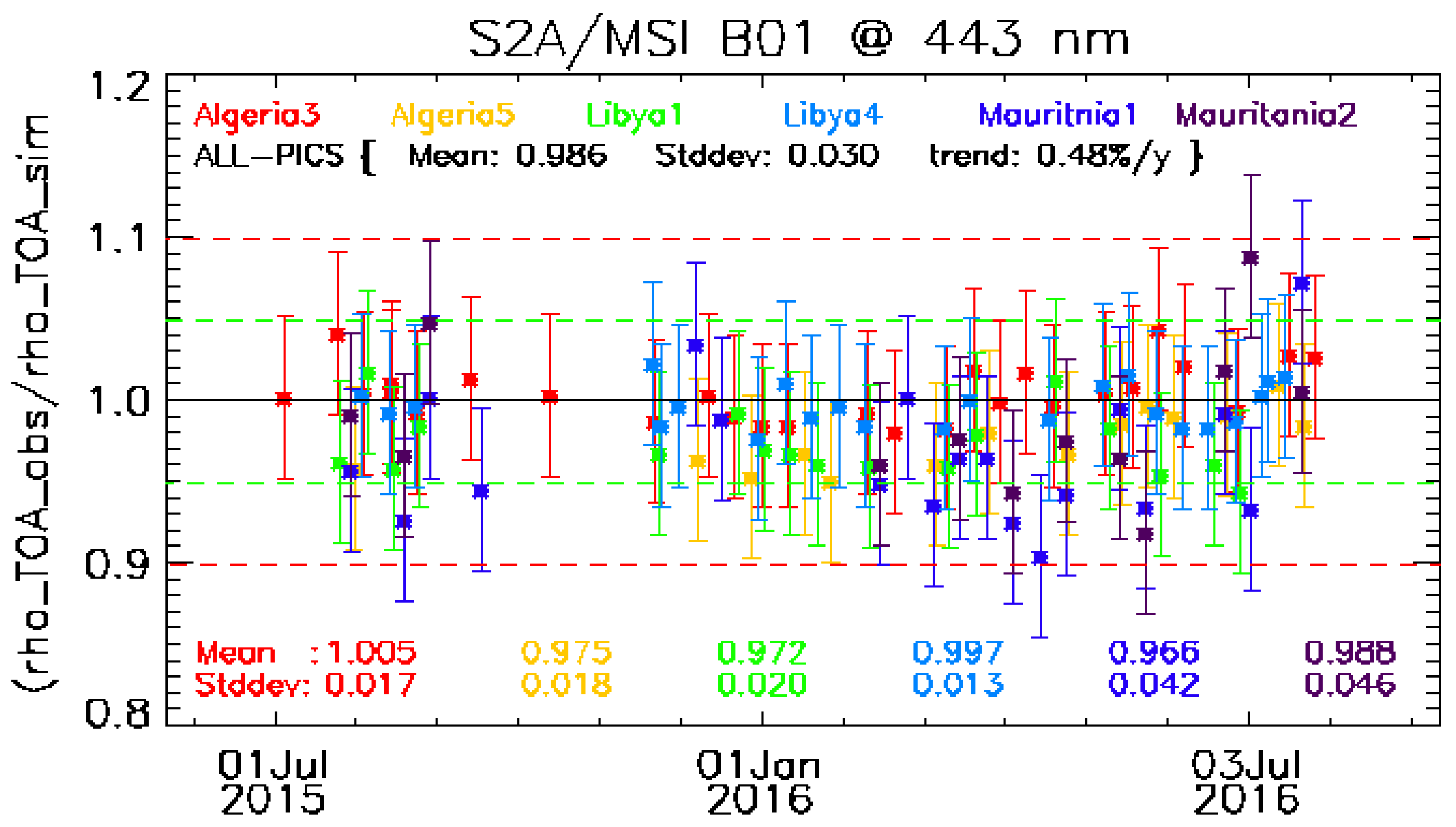
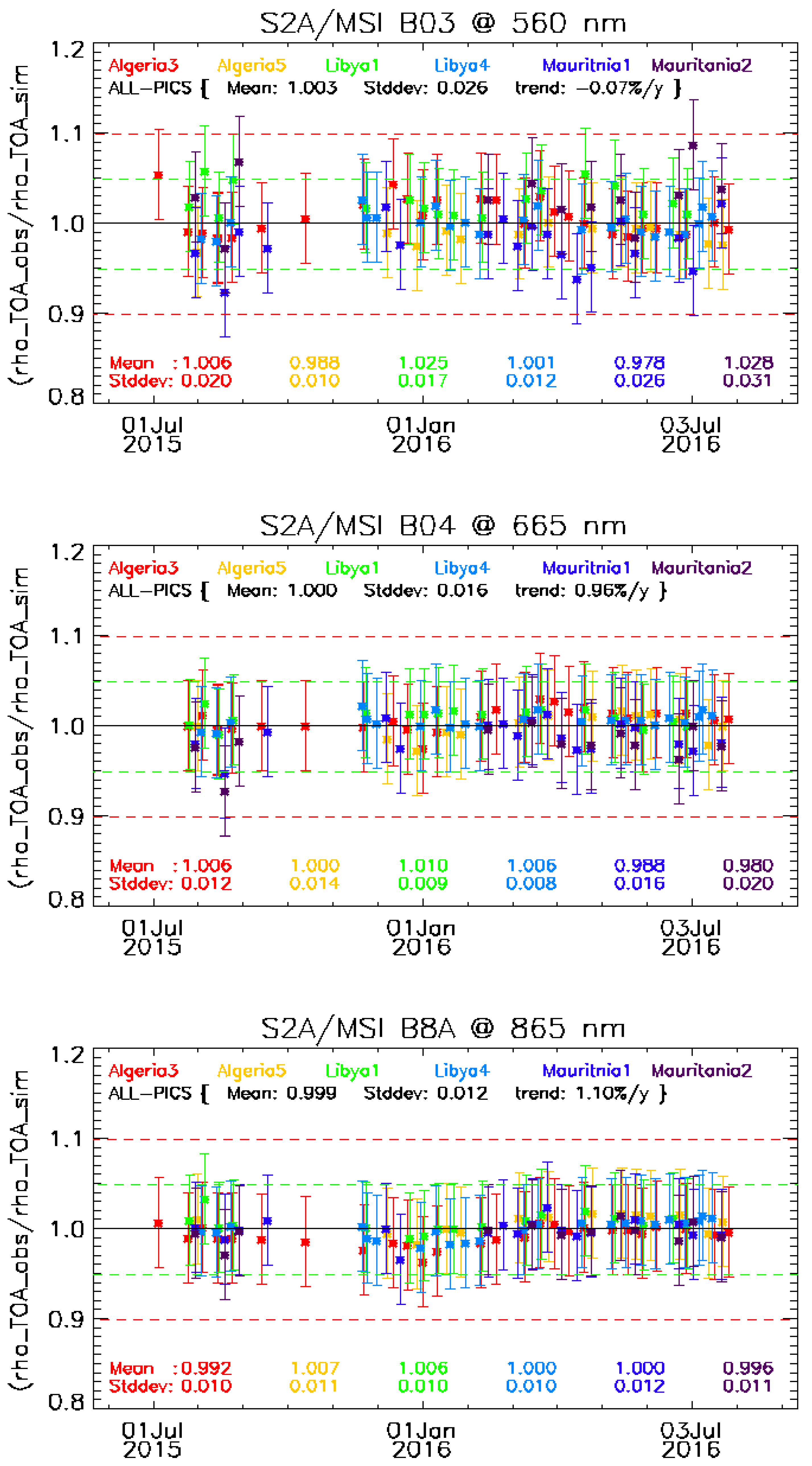
Figure 32.
Time series of TOA reflectance ratio Rb from S2A/MSI over (red) Algeria3, (yellow) Algeria5, (green) Libya1, (light-blue) Lybia4, (dark-blue) Mauritania1 and (purple) Mauritania2 for (from top to bottom) B01, B03, B04 and B8A over the commissioning period. The green (resp. red) dashed lines represent the 5% (resp. 10%) threshold specification. Error bars indicate the estimated uncertainty for the pseudo-invariant calibration sites (PICS) method.
Figure 32.
Time series of TOA reflectance ratio Rb from S2A/MSI over (red) Algeria3, (yellow) Algeria5, (green) Libya1, (light-blue) Lybia4, (dark-blue) Mauritania1 and (purple) Mauritania2 for (from top to bottom) B01, B03, B04 and B8A over the commissioning period. The green (resp. red) dashed lines represent the 5% (resp. 10%) threshold specification. Error bars indicate the estimated uncertainty for the pseudo-invariant calibration sites (PICS) method.
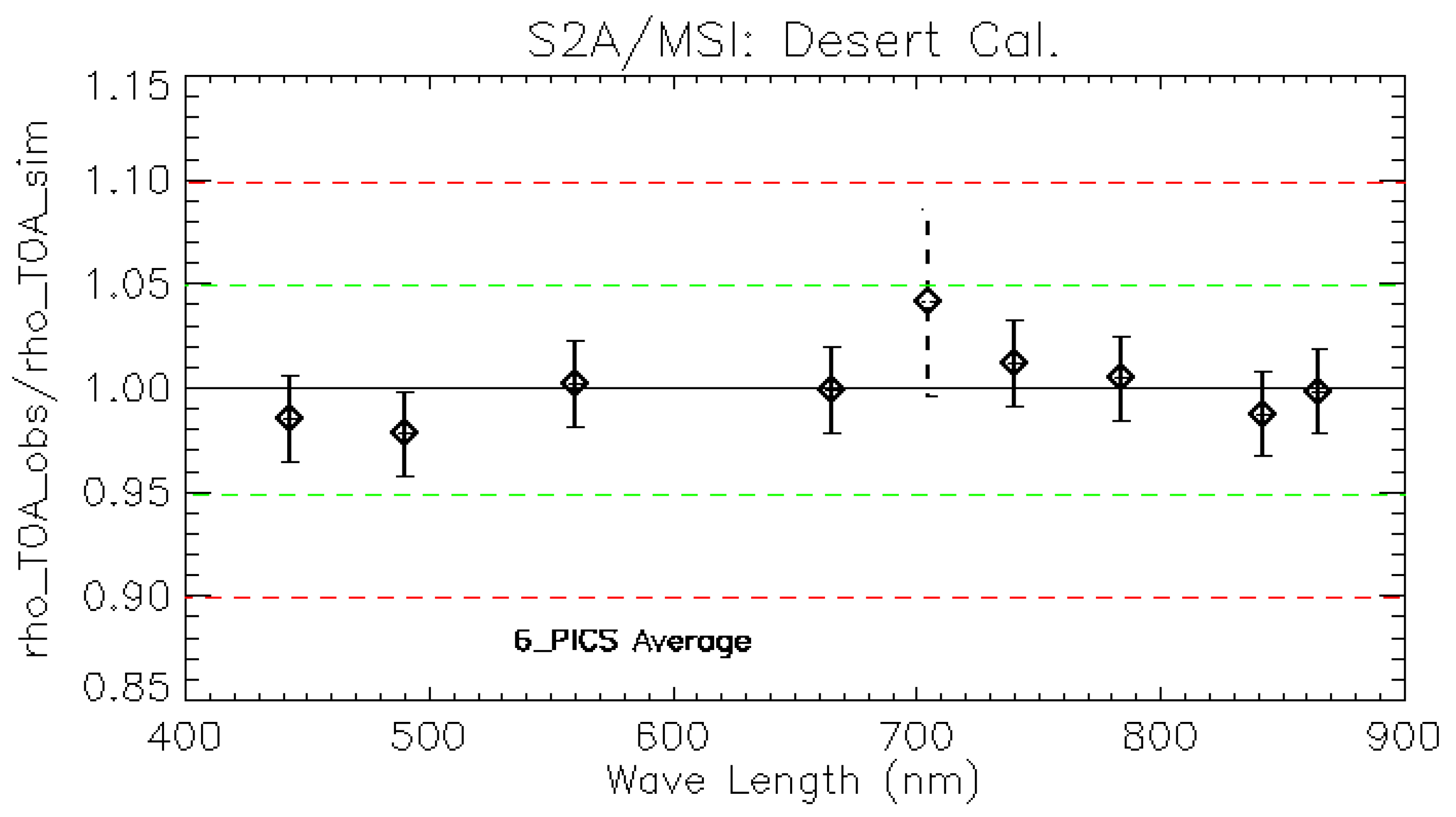
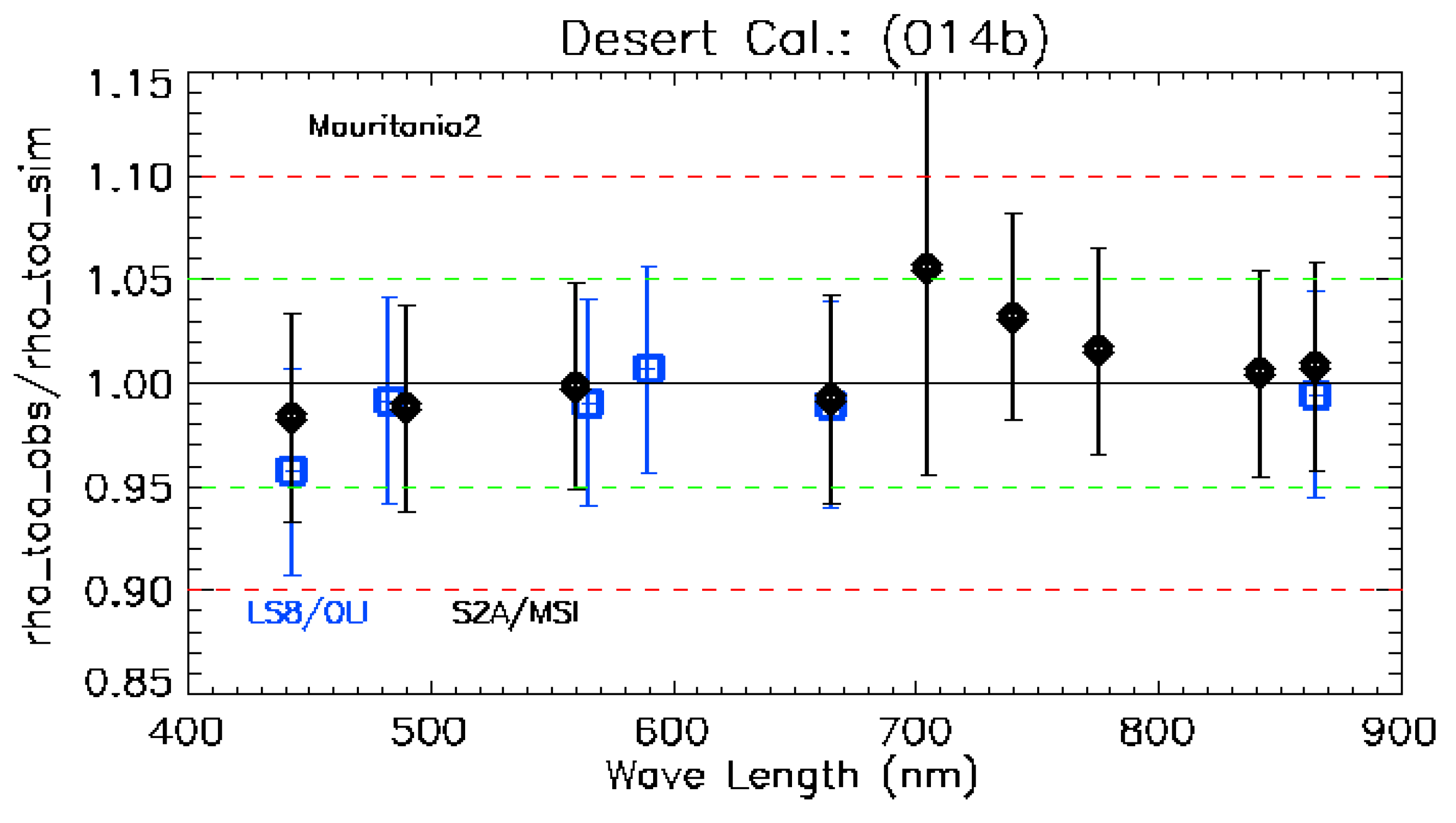
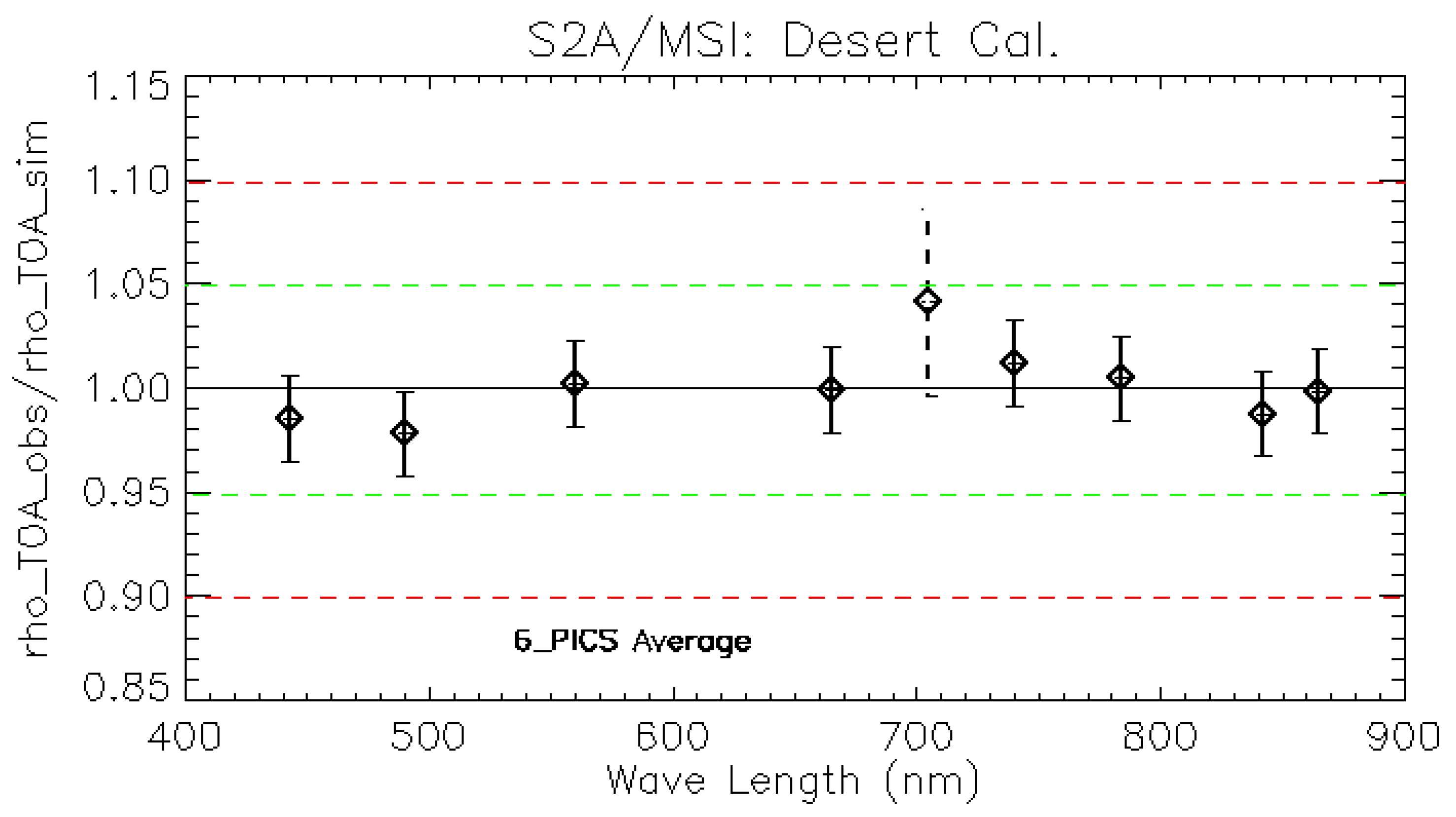
Figure 33.
Temporal average of the ratio of observed TOA reflectance to simulated one from S2A/MSI over the four-PICS as a function of wavelength. B05 result is shown with black dashed line due to significant gaseous absorption. The green (resp. red) dashed lines represent the 5% (resp. 10%) threshold specification. Error bars indicate the estimated uncertainty for the PICS method.
Figure 33.
Temporal average of the ratio of observed TOA reflectance to simulated one from S2A/MSI over the four-PICS as a function of wavelength. B05 result is shown with black dashed line due to significant gaseous absorption. The green (resp. red) dashed lines represent the 5% (resp. 10%) threshold specification. Error bars indicate the estimated uncertainty for the PICS method.
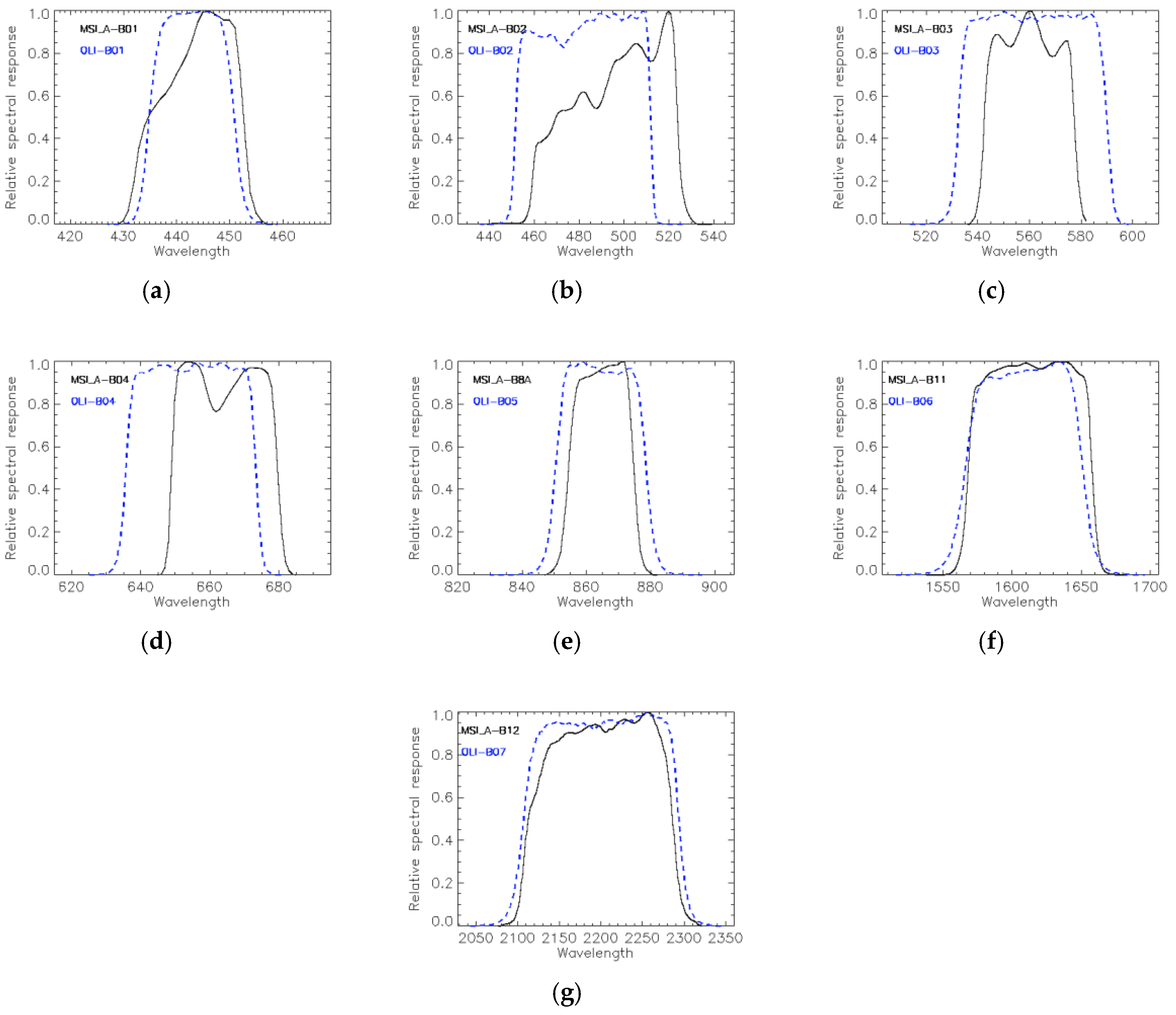
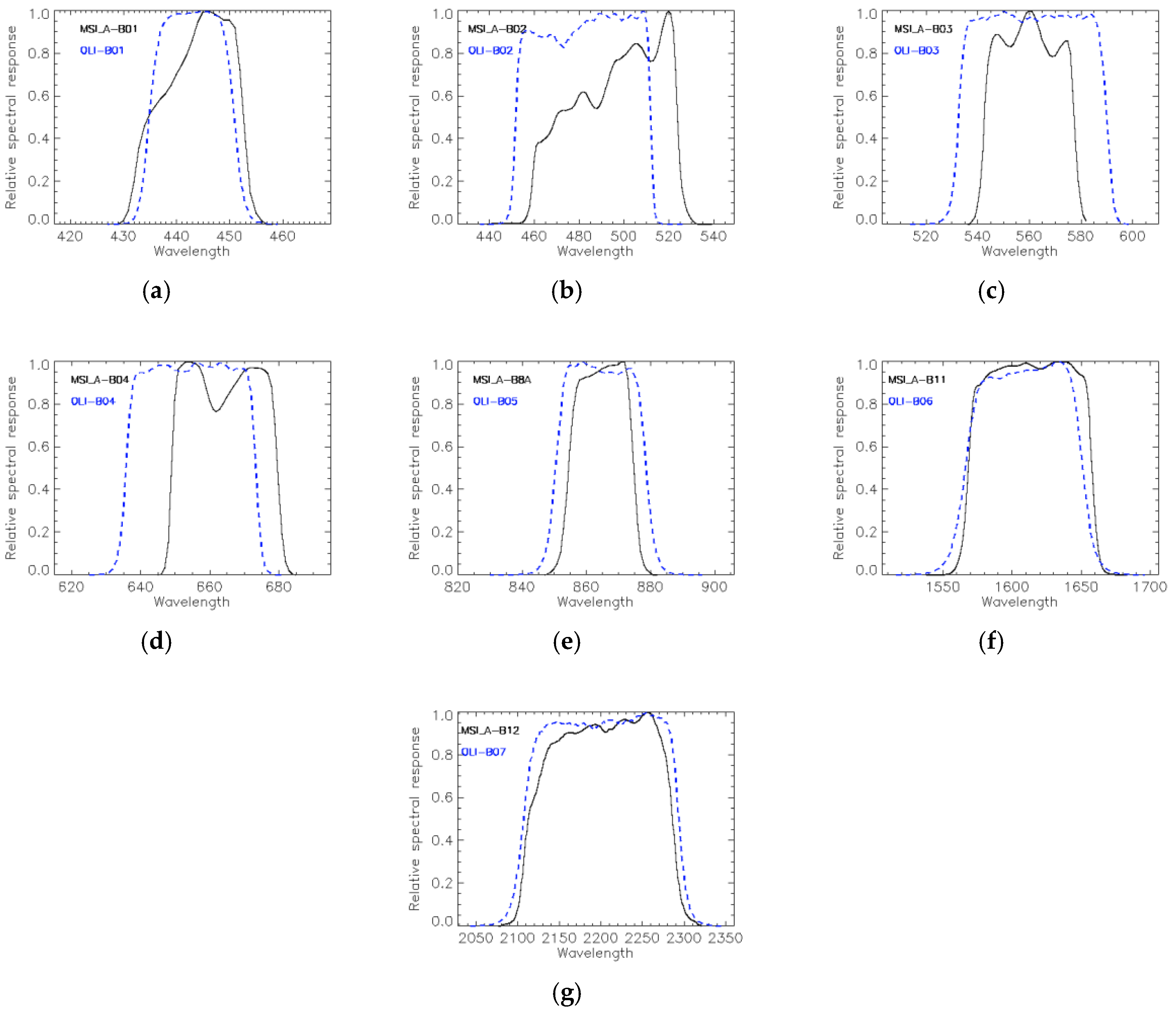
Figure 34.
Relative spectral response of (solid-black) S2A/MSI and (dashed-blue) LANDSAT-8/OLI for bands (a–g) 443, 490, 560, 665, 865, 1610 and 2190 nm respectively.
Figure 34.
Relative spectral response of (solid-black) S2A/MSI and (dashed-blue) LANDSAT-8/OLI for bands (a–g) 443, 490, 560, 665, 865, 1610 and 2190 nm respectively.
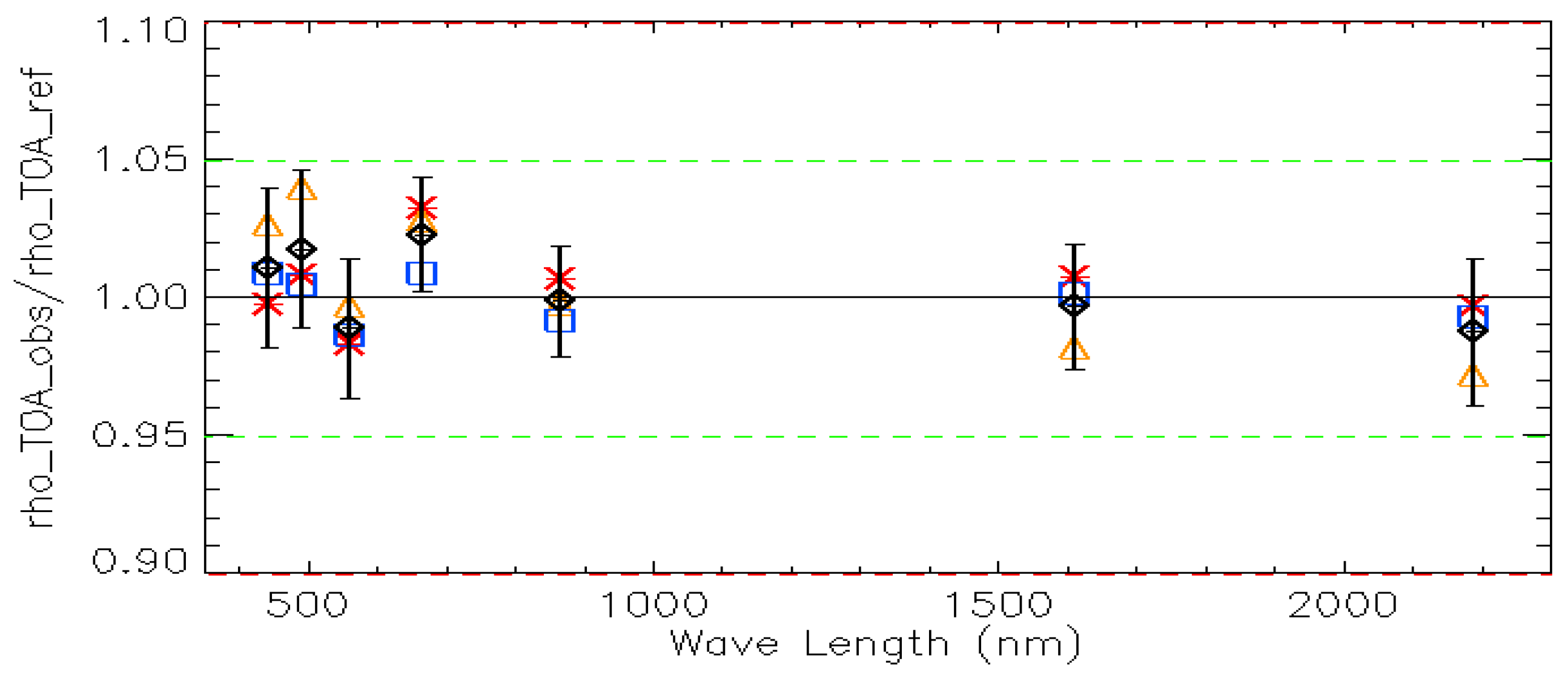
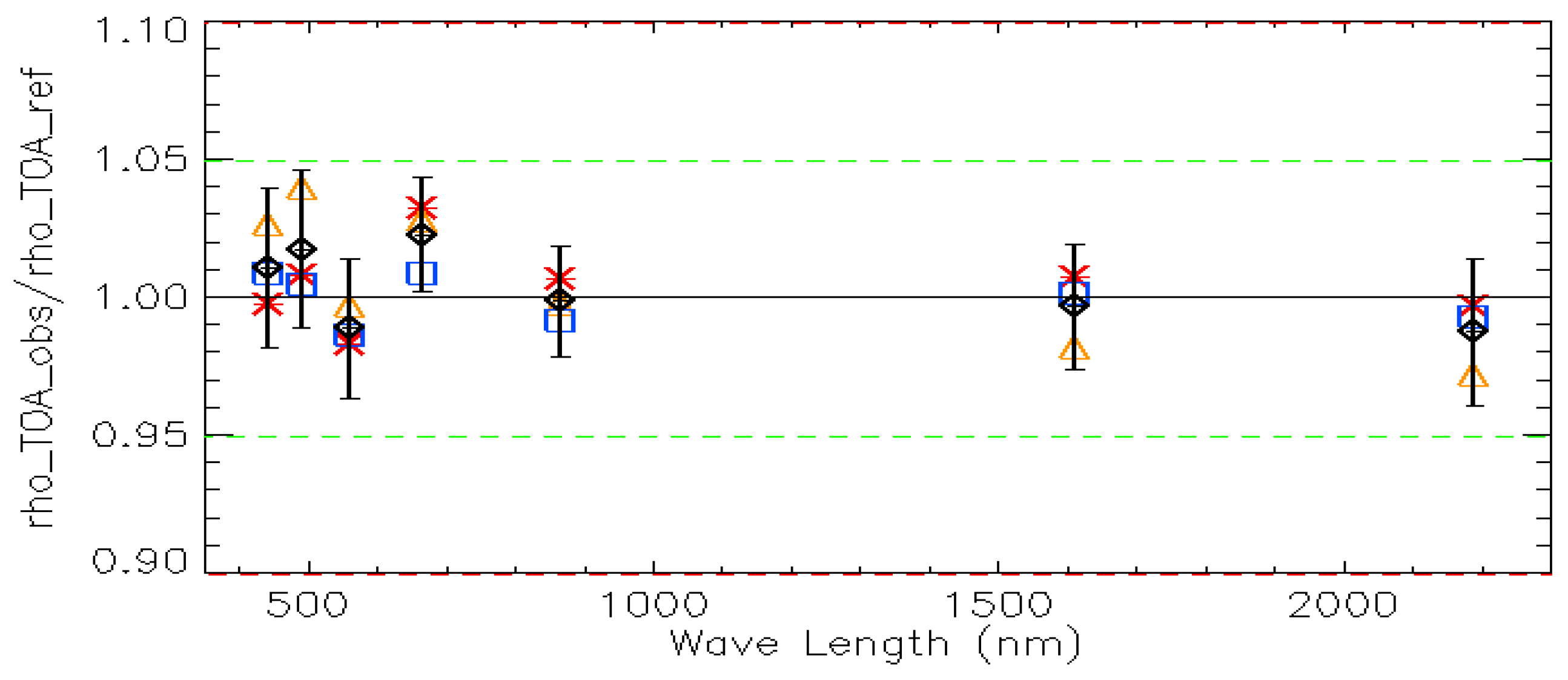
Figure 35.
TOA reflectance ratio defined as S2A-MSI/LS8-OLI measurements derived from extracted doublets over (red asterisk) Algeria3, (orange triangle) Libya4, (blue square) Railroad Valley Playa site (RRVP) and (black diamond) the average over the three test sites as a function of the wavelength. The green (resp. red) dashed lines represent the 5% (resp. 10%) threshold specification. Error bars indicate the estimated uncertainty.
Figure 35.
TOA reflectance ratio defined as S2A-MSI/LS8-OLI measurements derived from extracted doublets over (red asterisk) Algeria3, (orange triangle) Libya4, (blue square) Railroad Valley Playa site (RRVP) and (black diamond) the average over the three test sites as a function of the wavelength. The green (resp. red) dashed lines represent the 5% (resp. 10%) threshold specification. Error bars indicate the estimated uncertainty.
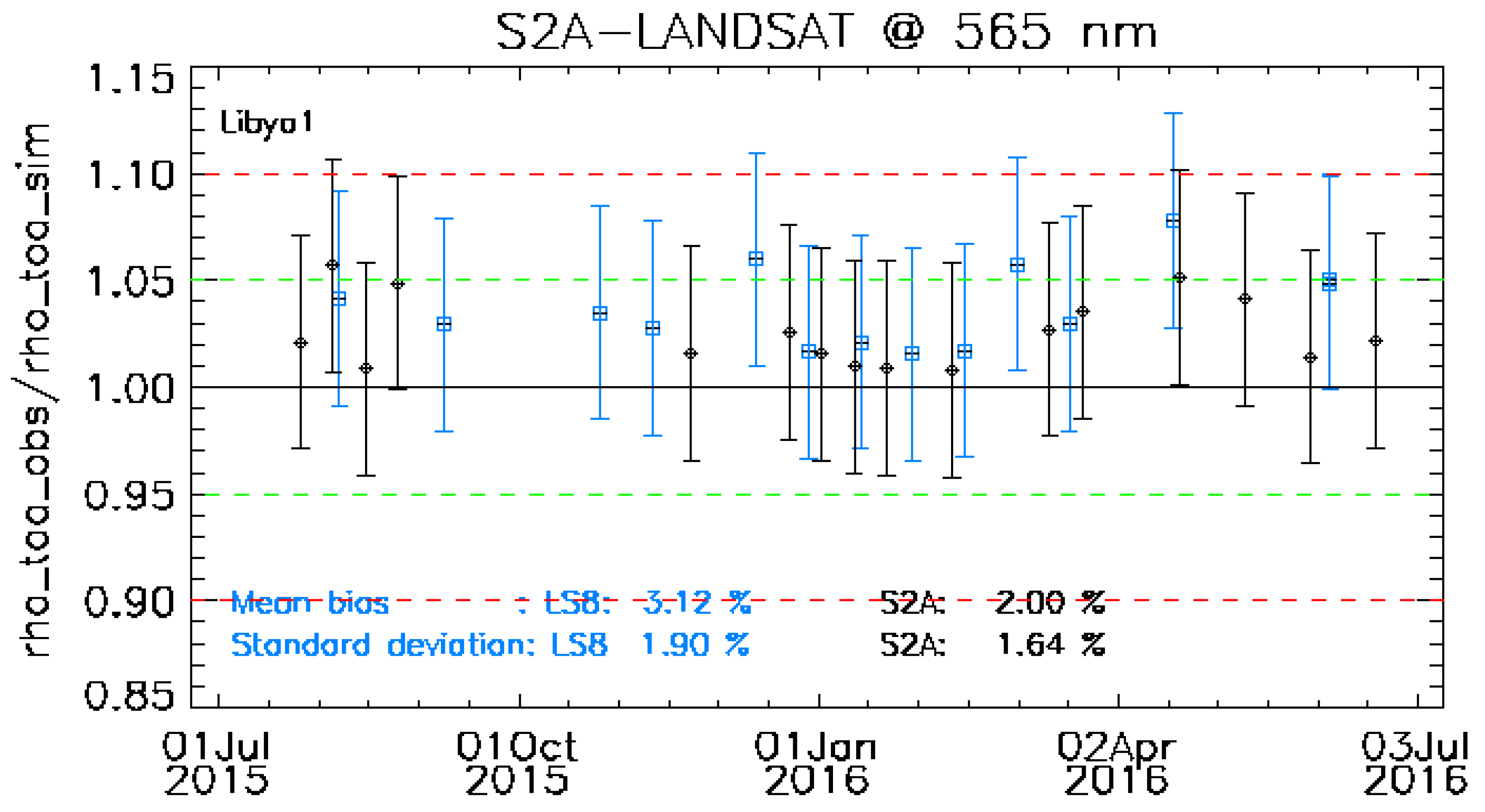
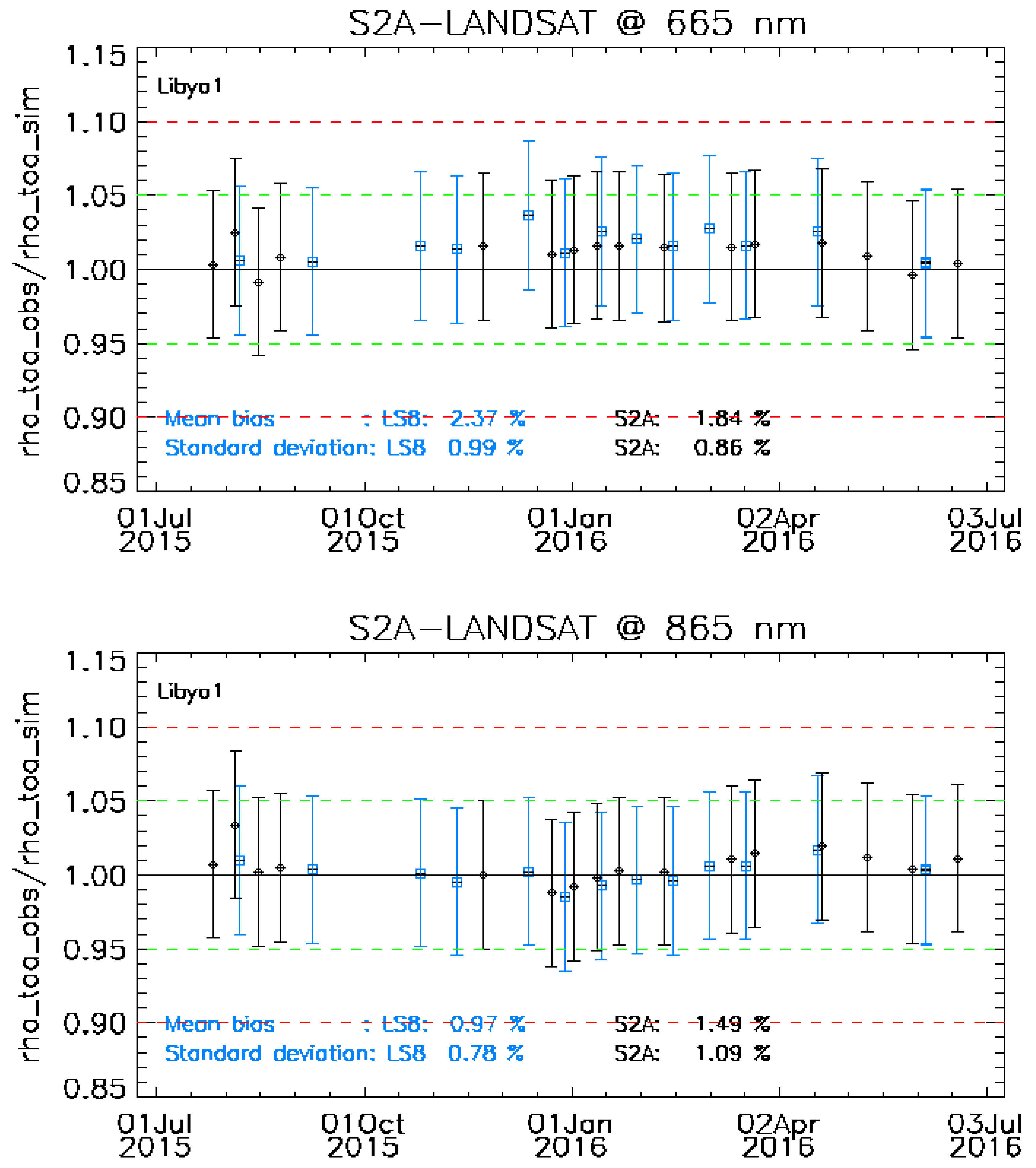
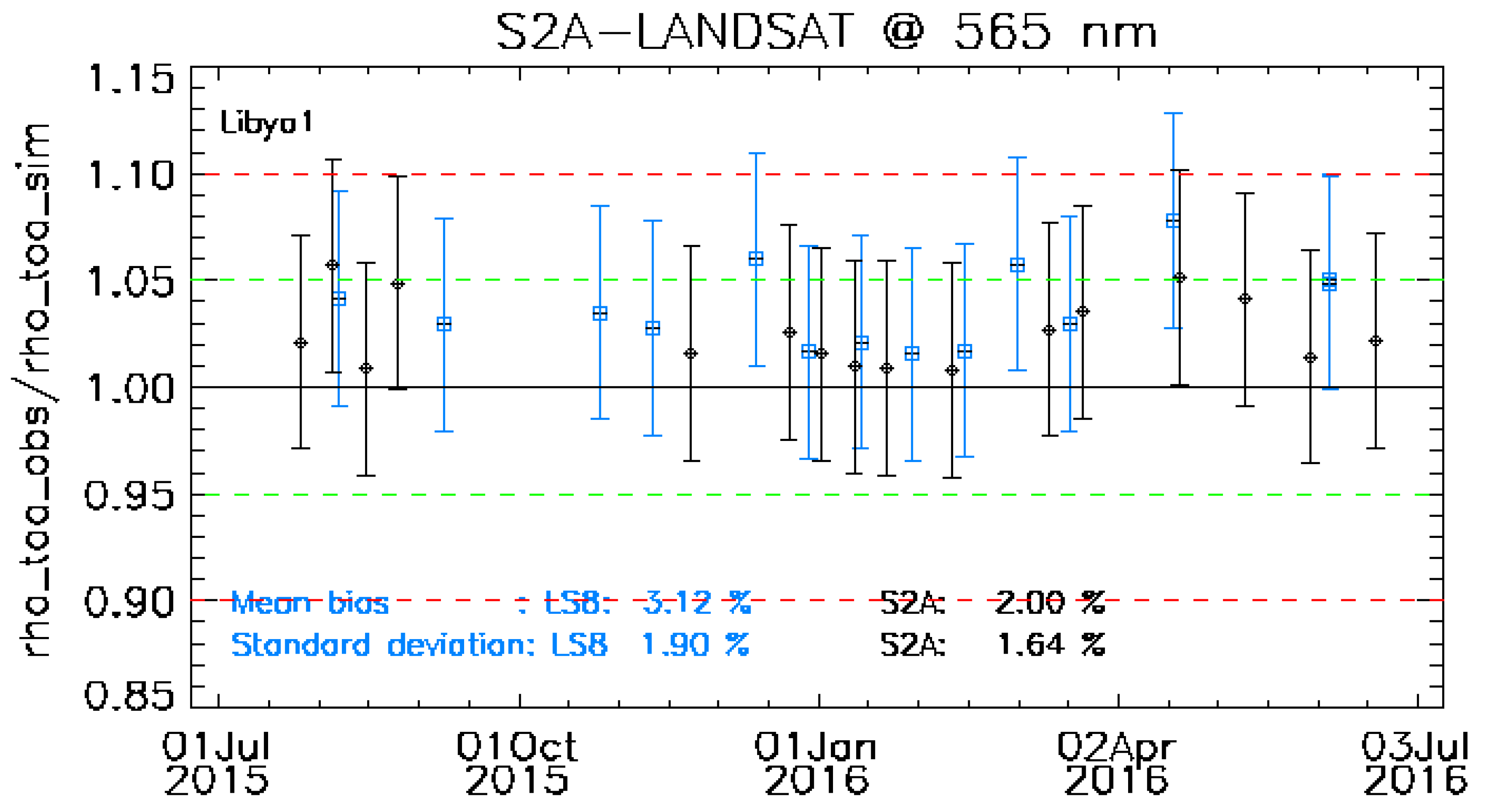
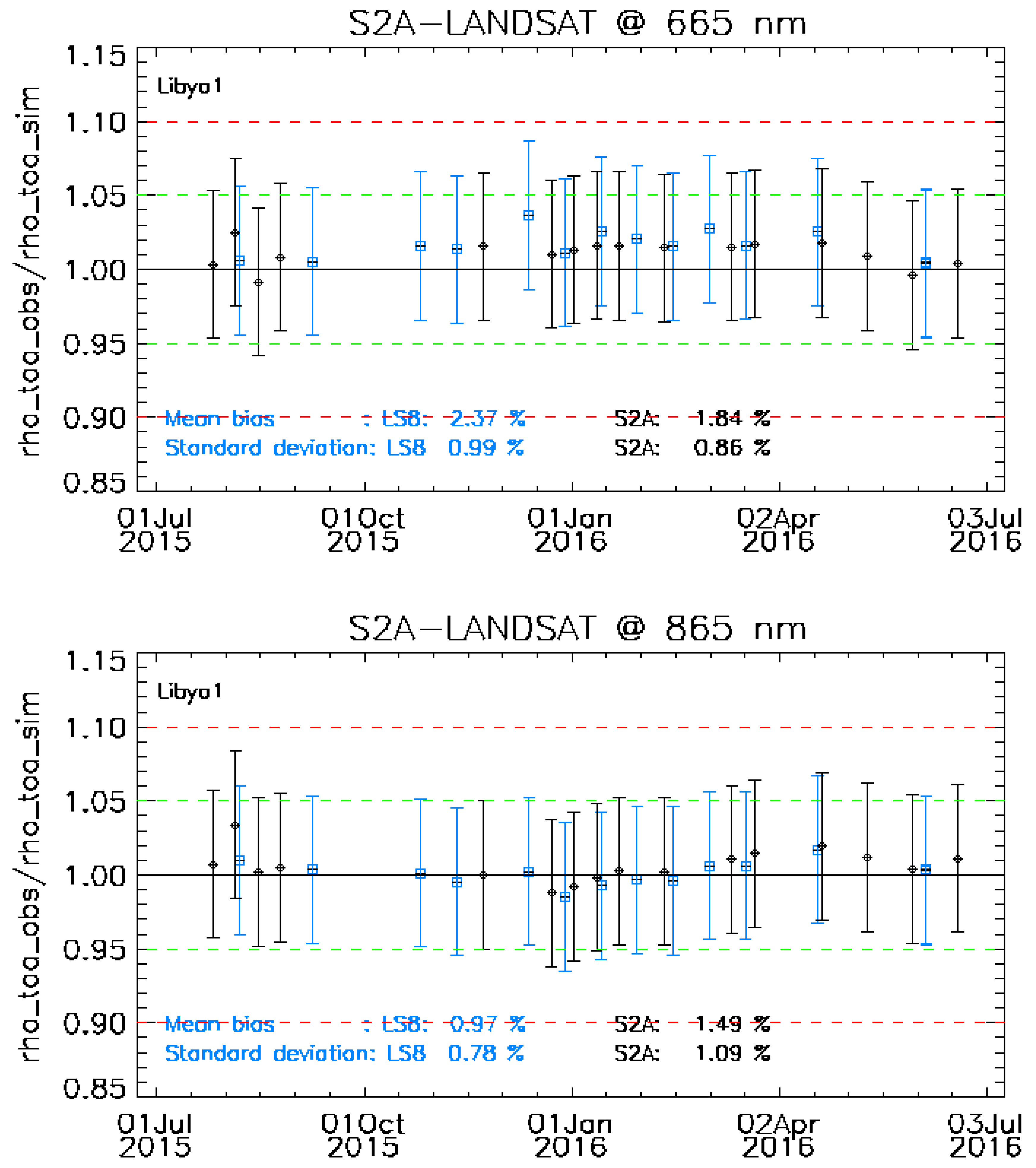
Figure 36.
Time series of TOA reflectance ratio Rb from (black) S2A/MSI and (blue) LS8/OLI over Lybia1 for (from top to bottom) B03, B04 and B8A from S2A over the commissioning period. The green (resp. red) dashed lines represent the 5% (resp. 10%) threshold specification. Error bars indicate the estimated uncertainty for the PICS method.
Figure 36.
Time series of TOA reflectance ratio Rb from (black) S2A/MSI and (blue) LS8/OLI over Lybia1 for (from top to bottom) B03, B04 and B8A from S2A over the commissioning period. The green (resp. red) dashed lines represent the 5% (resp. 10%) threshold specification. Error bars indicate the estimated uncertainty for the PICS method.
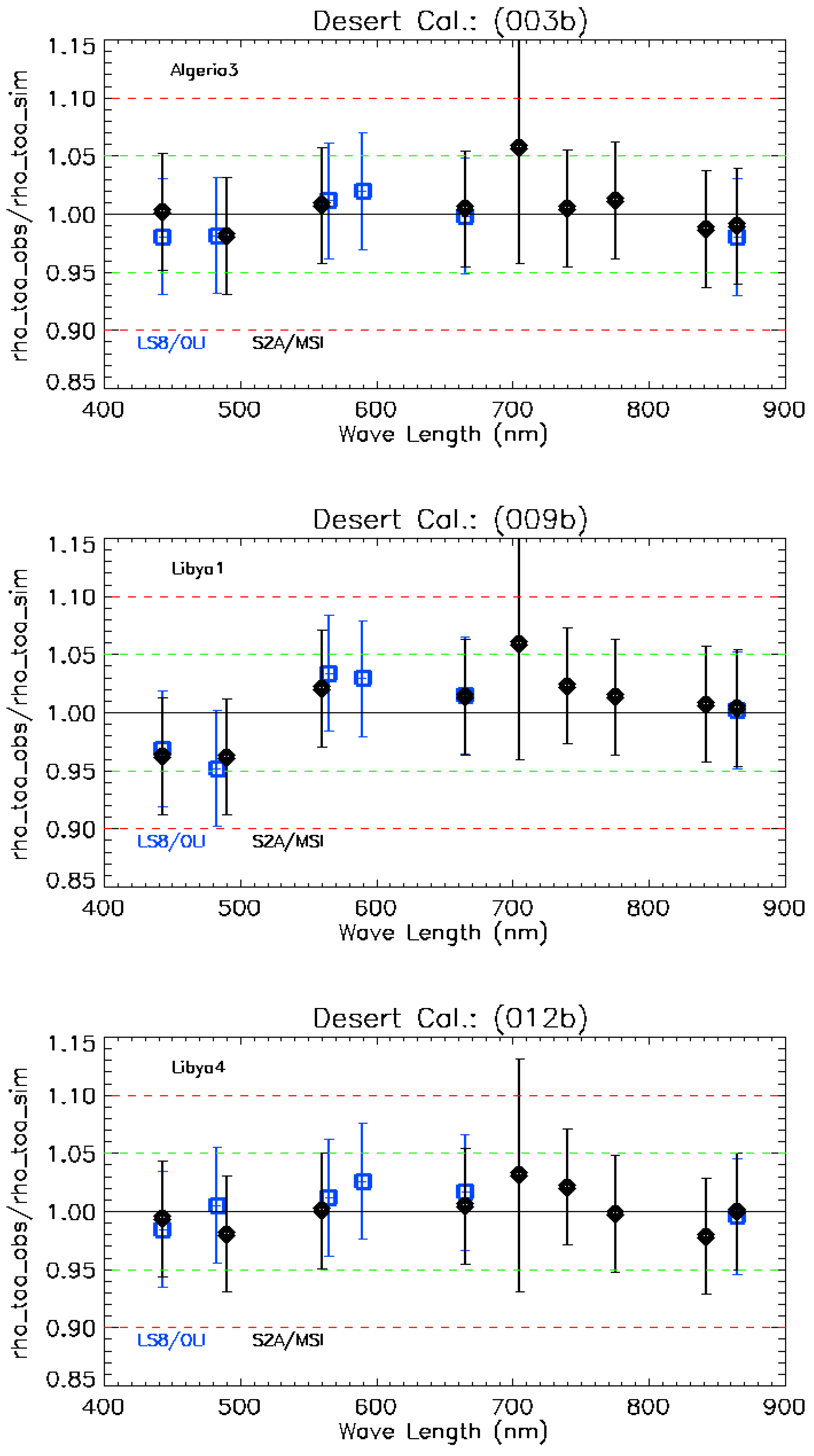
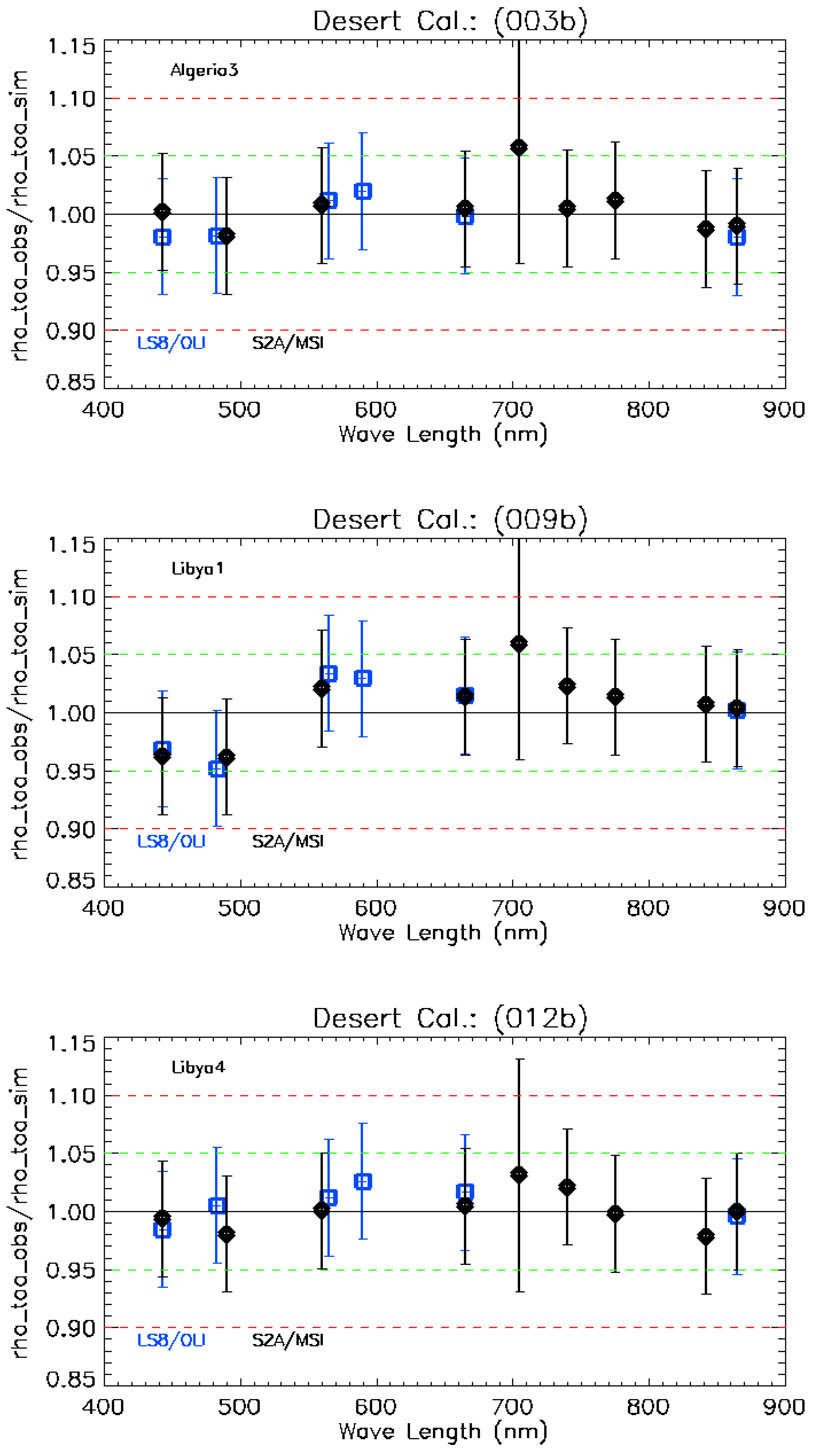
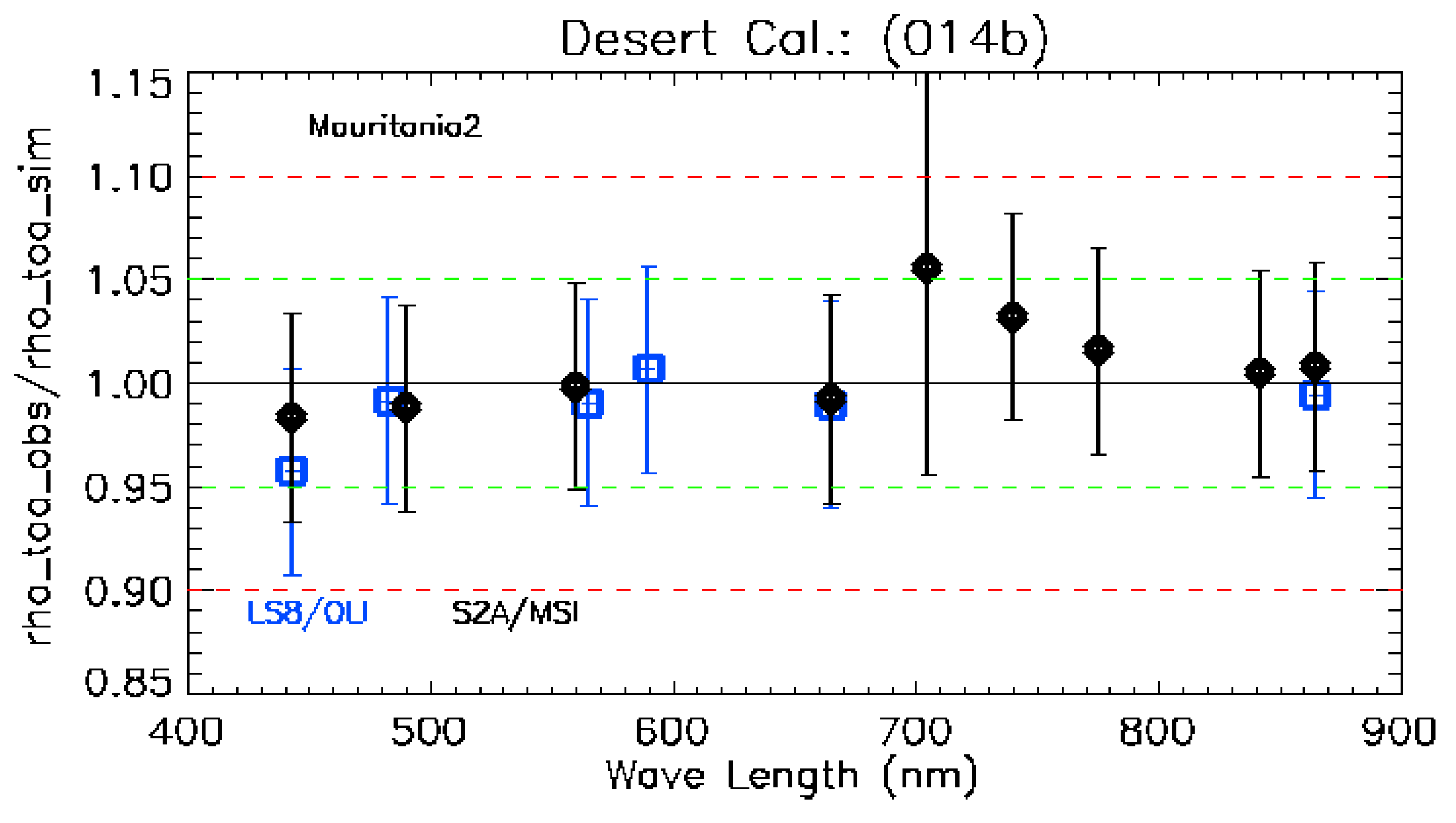
Figure 37.
Ratio of observed TOA reflectance to simulated one for each sensor (black) S2A/MSI and (blue) LANDSAT-8/Operational Land Imager (OLI) over Algeria3, Libya1, Libya4, and Mauritania2 sites as a function of wavelength. The green (resp. red) dashed lines represent the 5% (resp. 10%) threshold specification. Error bars indicate the estimated uncertainty for the PICS method.
Figure 37.
Ratio of observed TOA reflectance to simulated one for each sensor (black) S2A/MSI and (blue) LANDSAT-8/Operational Land Imager (OLI) over Algeria3, Libya1, Libya4, and Mauritania2 sites as a function of wavelength. The green (resp. red) dashed lines represent the 5% (resp. 10%) threshold specification. Error bars indicate the estimated uncertainty for the PICS method.
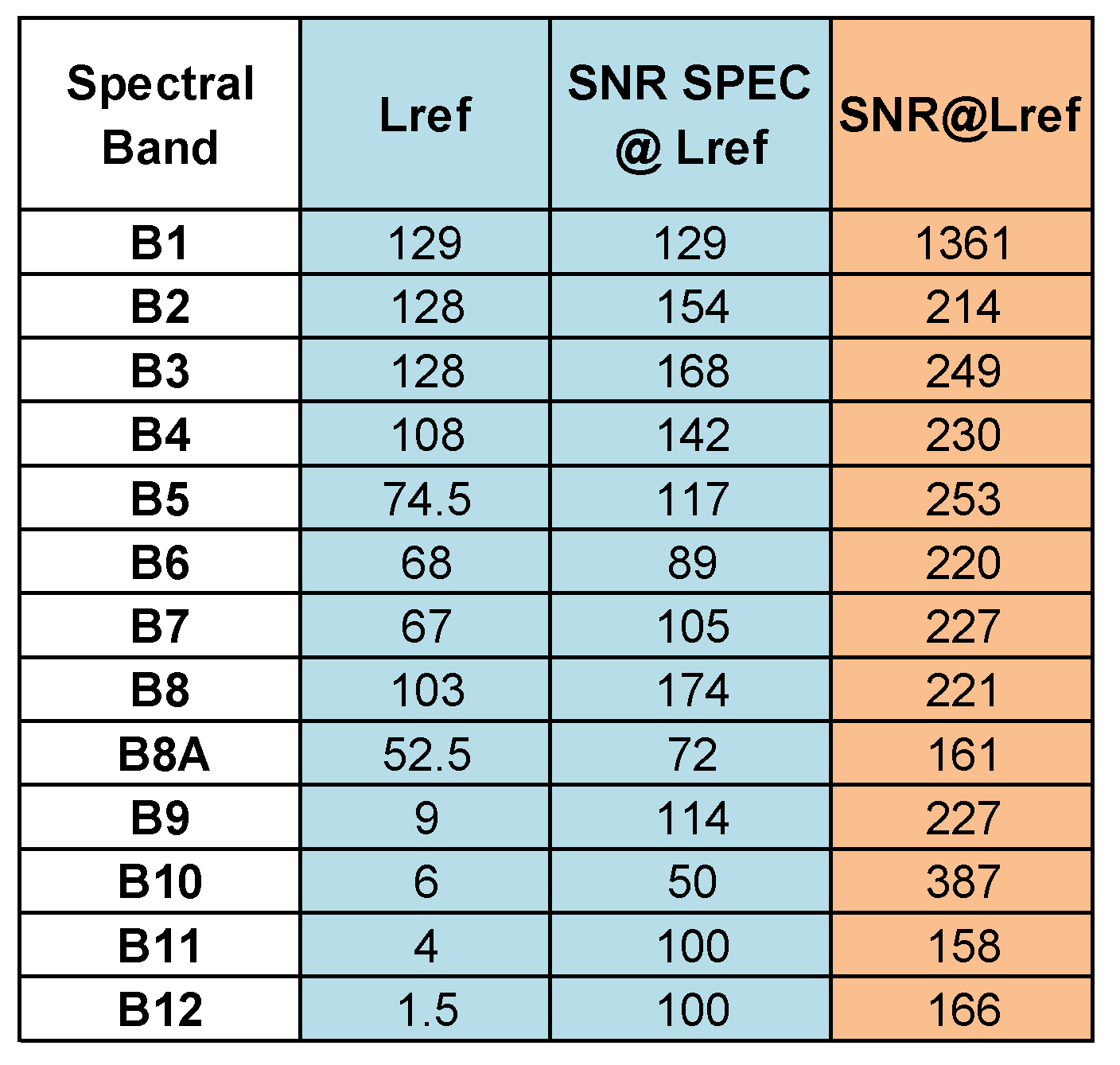
Figure 38.
Sentinel-2 reference radiance Lref (W/m²/sr/μm), Signal-to-Noise Ratio (SNR) requirement at reference radiance and current SNR measurement on sun-diffuser at reference radiance.
Figure 38.
Sentinel-2 reference radiance Lref (W/m²/sr/μm), Signal-to-Noise Ratio (SNR) requirement at reference radiance and current SNR measurement on sun-diffuser at reference radiance.
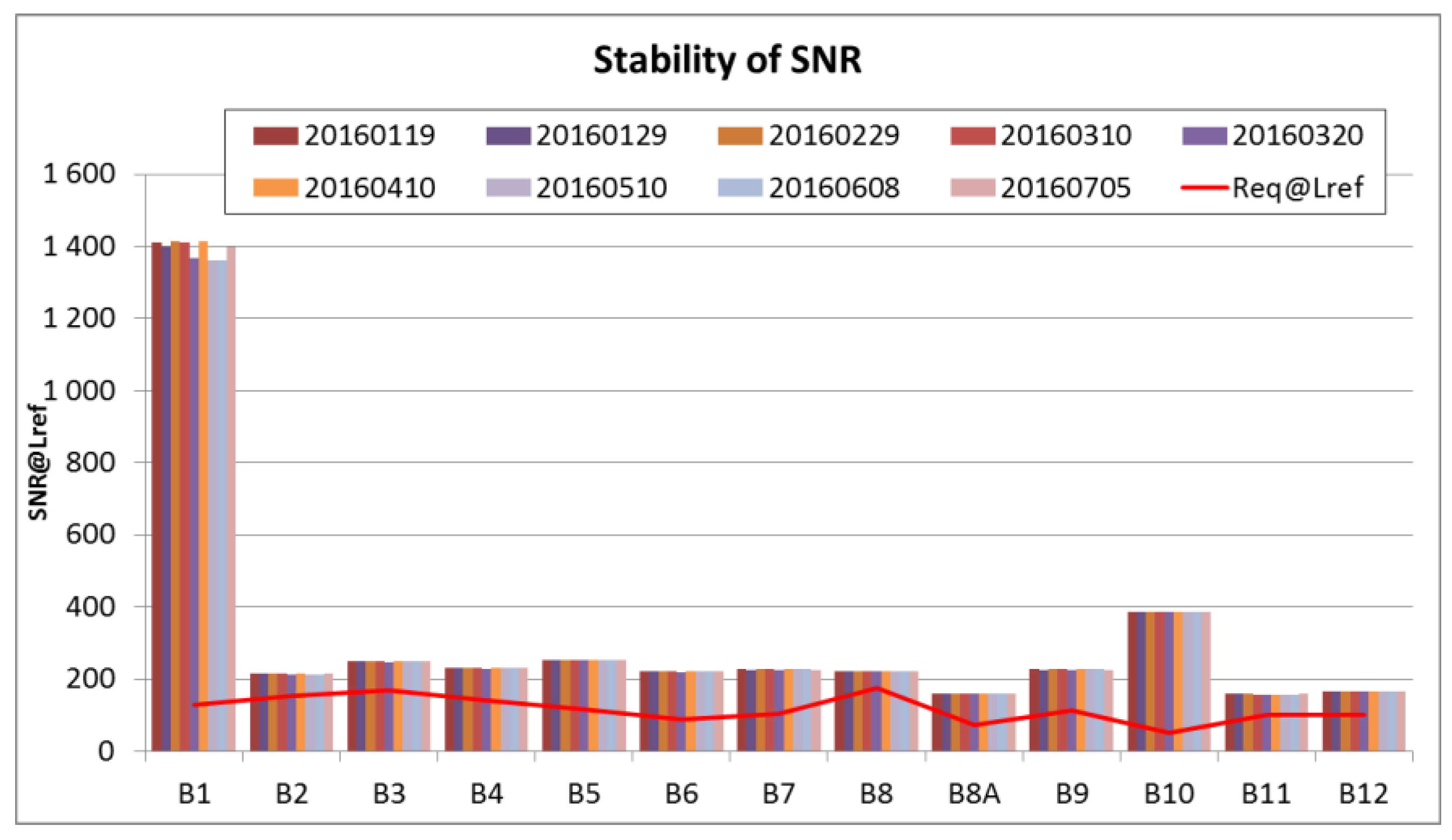
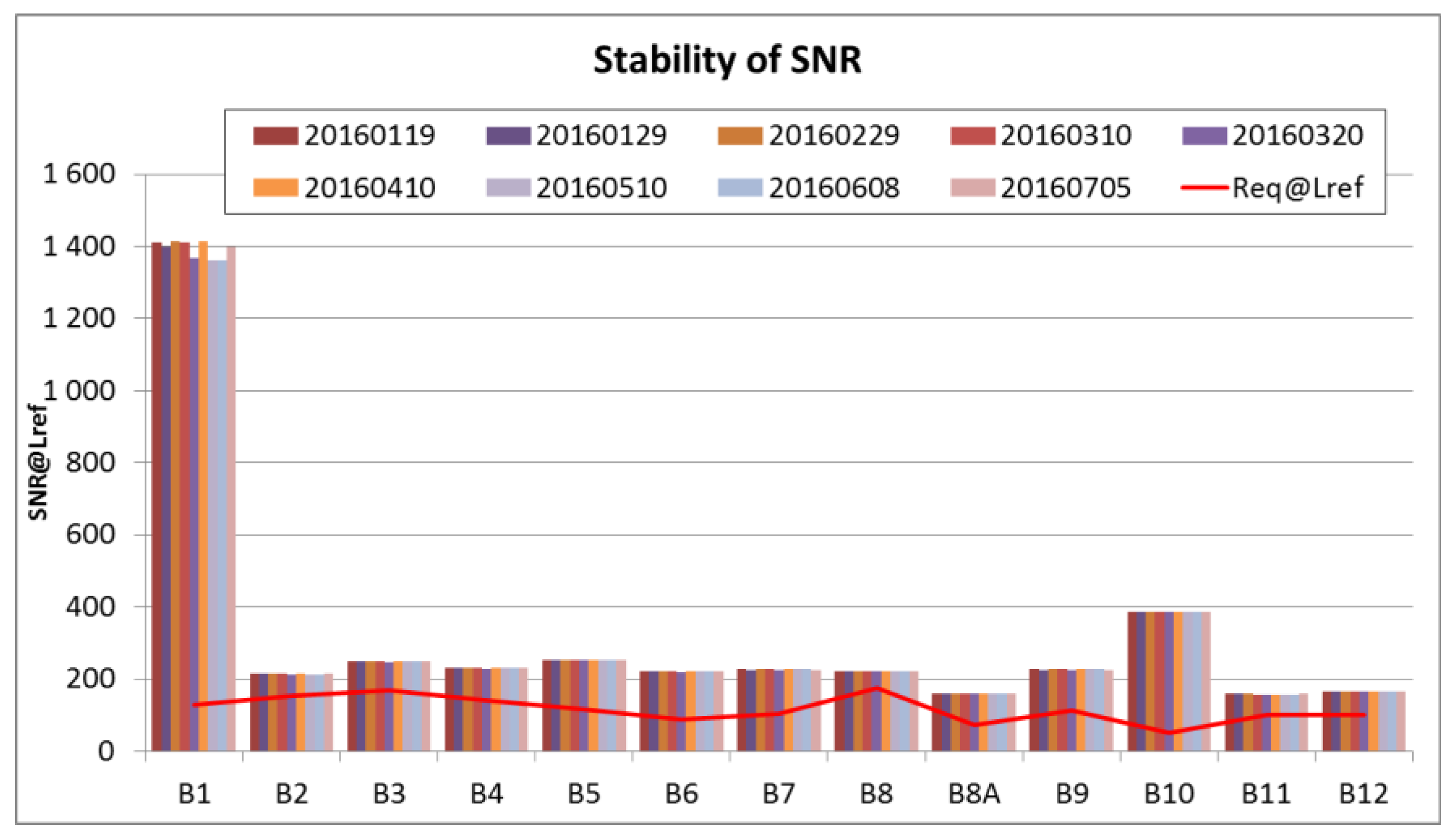
Figure 39.
Average SNR at reference radiance Lref measurements (per band) since January 2016.
Figure 39.
Average SNR at reference radiance Lref measurements (per band) since January 2016.
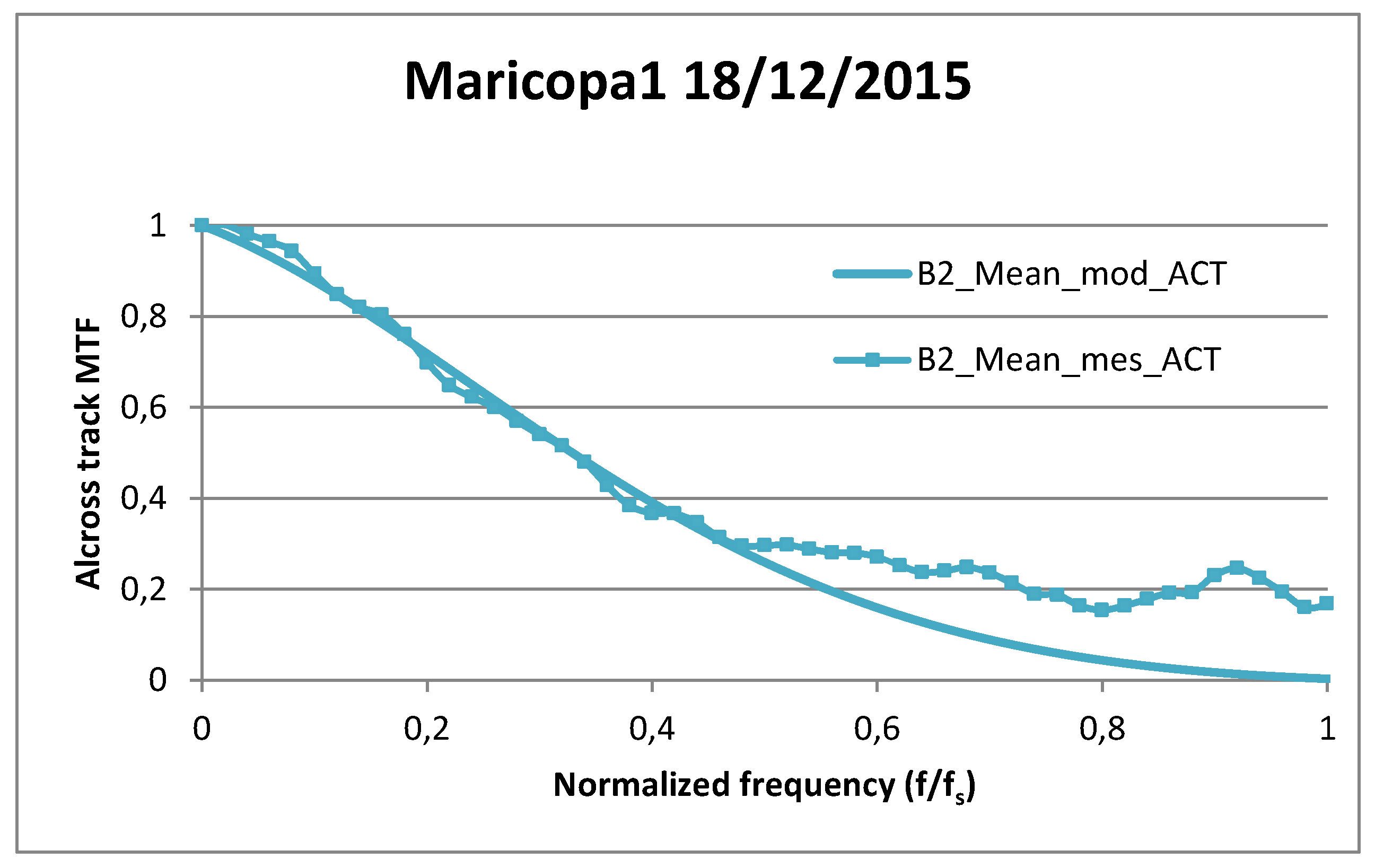
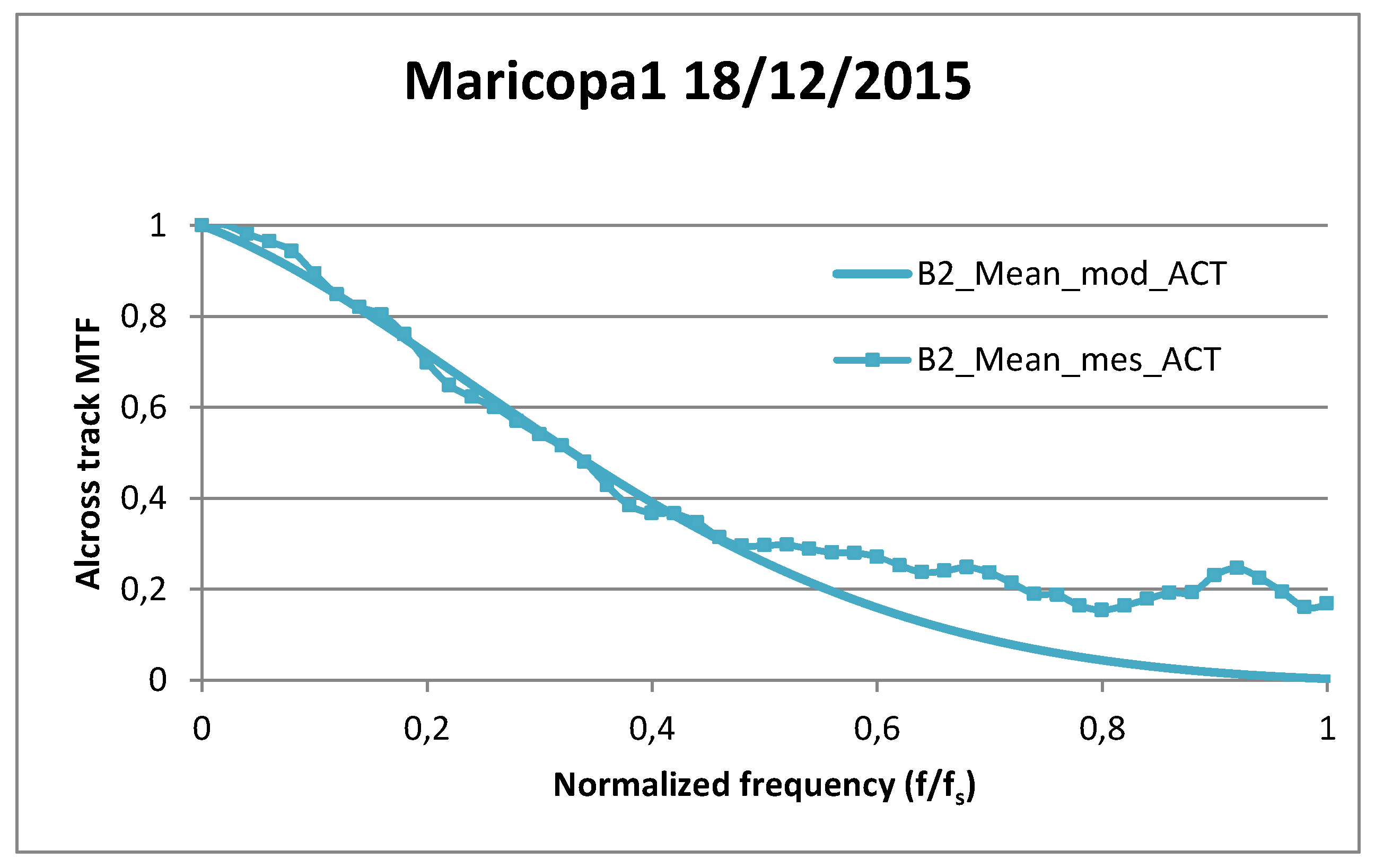
Figure 40.
Modulation Transfer Function (MTF) curve for B02 band (centred at 490 nm) for the across-track direction.
Figure 40.
Modulation Transfer Function (MTF) curve for B02 band (centred at 490 nm) for the across-track direction.
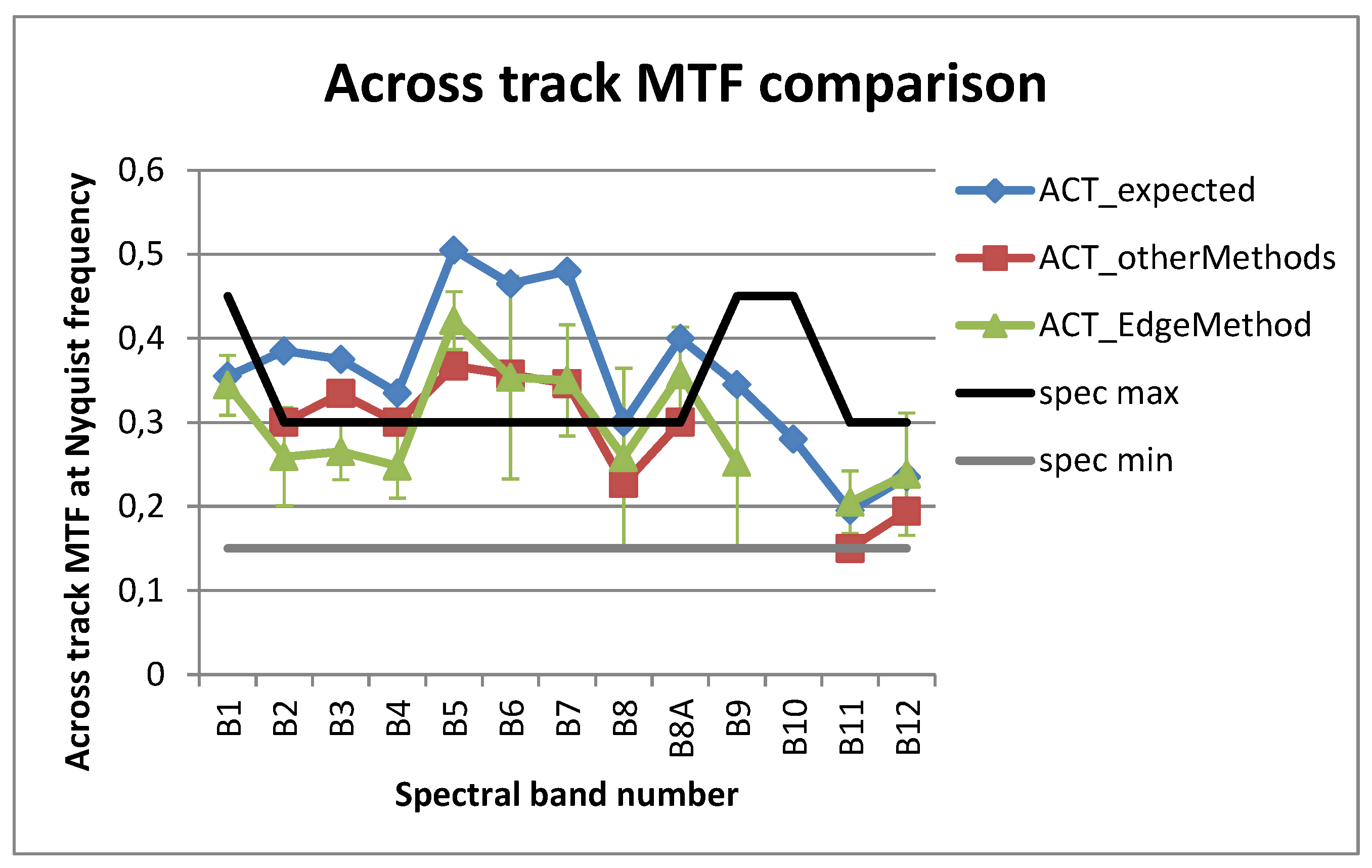
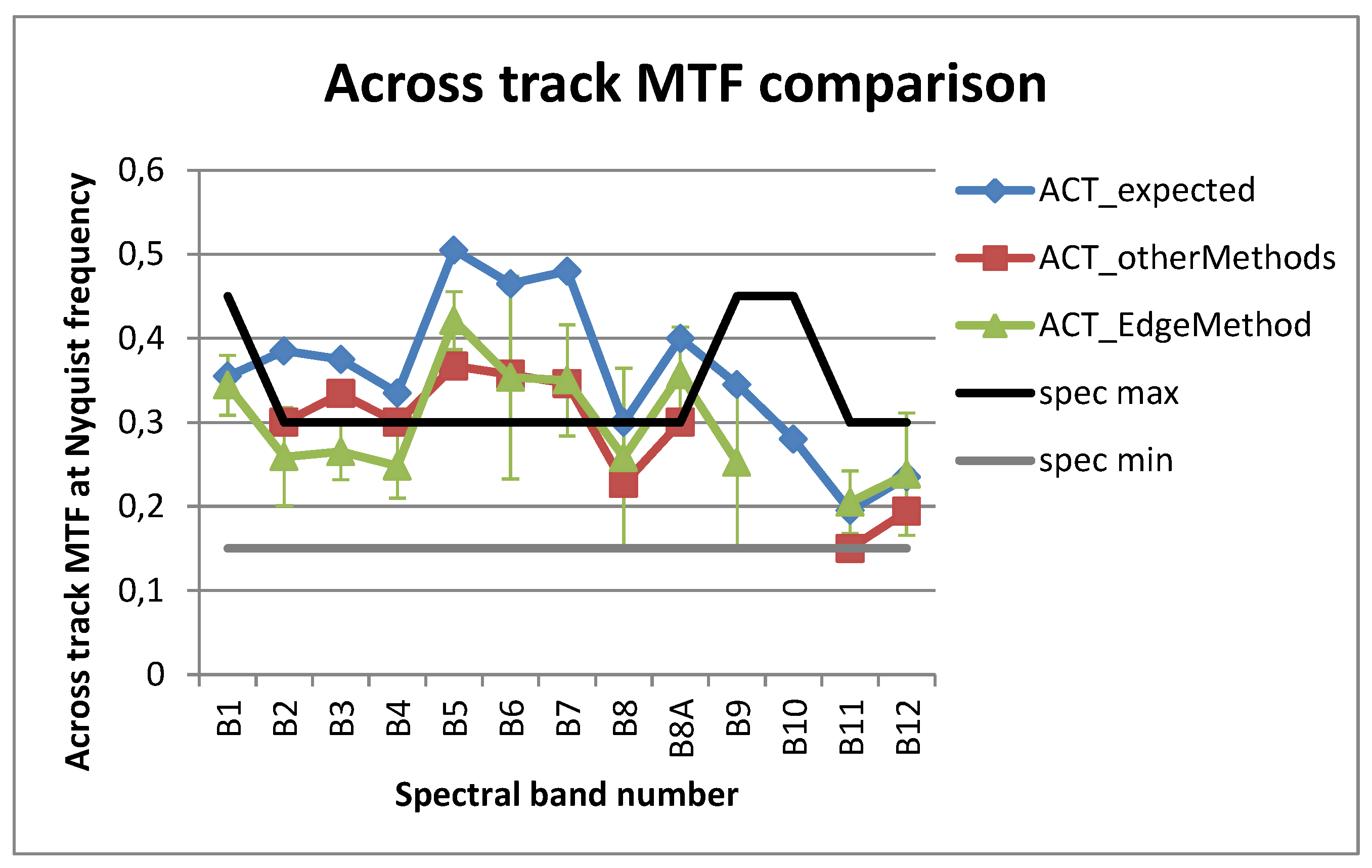
Figure 41.
MTF results for the across-track direction, and MTF requirements (min value, spec min and max value, spec max).
Figure 41.
MTF results for the across-track direction, and MTF requirements (min value, spec min and max value, spec max).
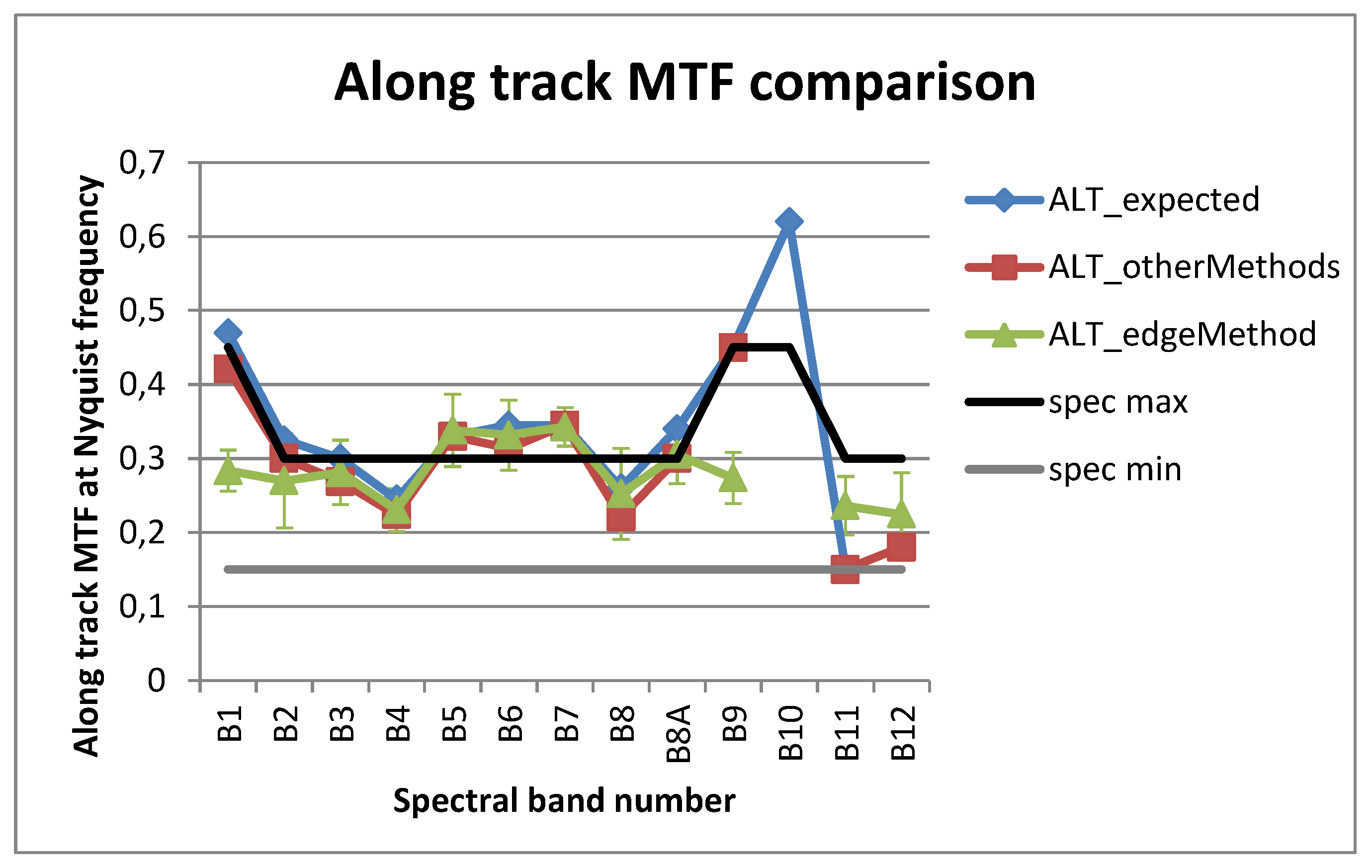
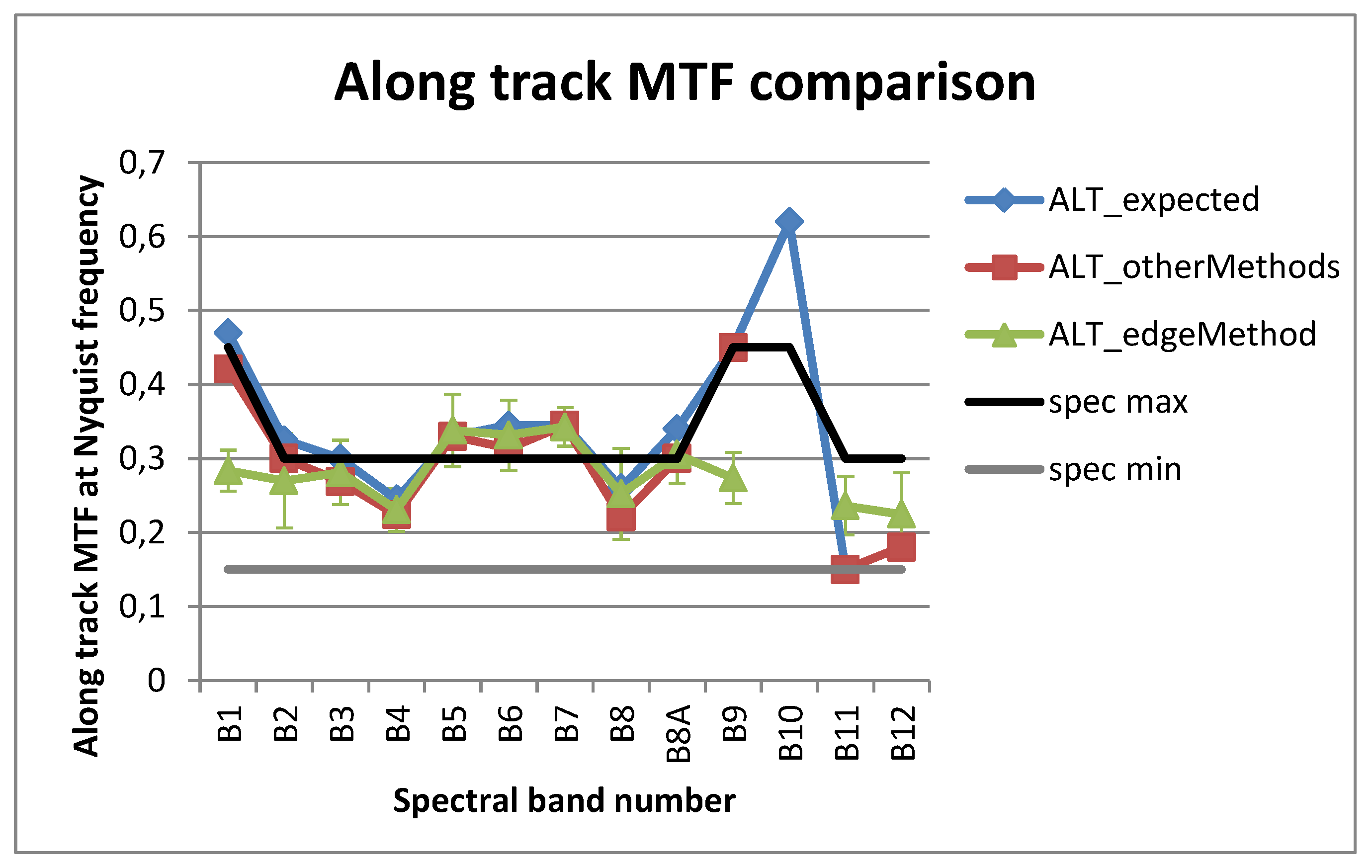
Figure 42.
MTF results for the along-track direction, and MTF requirements (min value, spec min and max value, spec max).
Figure 42.
MTF results for the along-track direction, and MTF requirements (min value, spec min and max value, spec max).
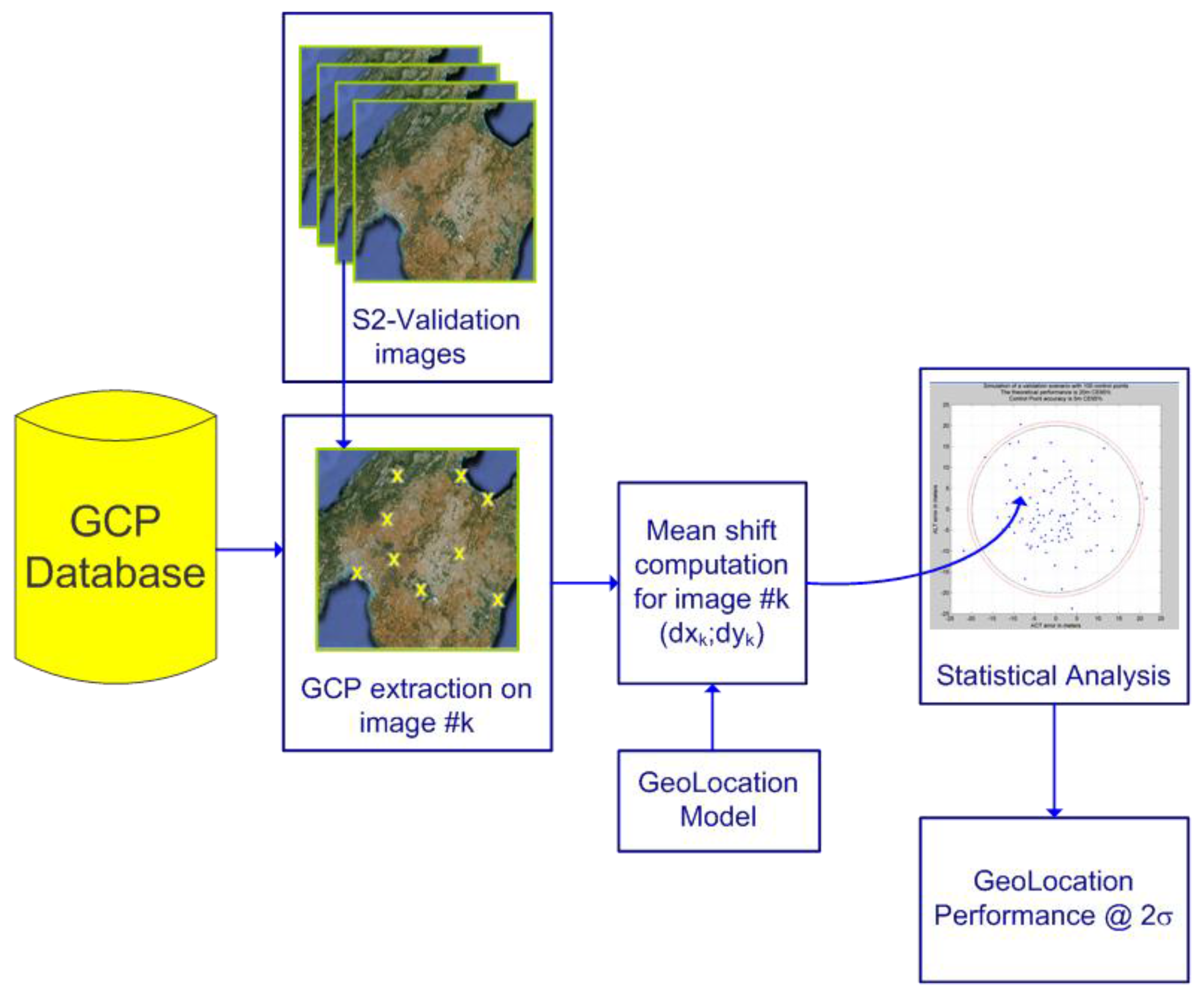
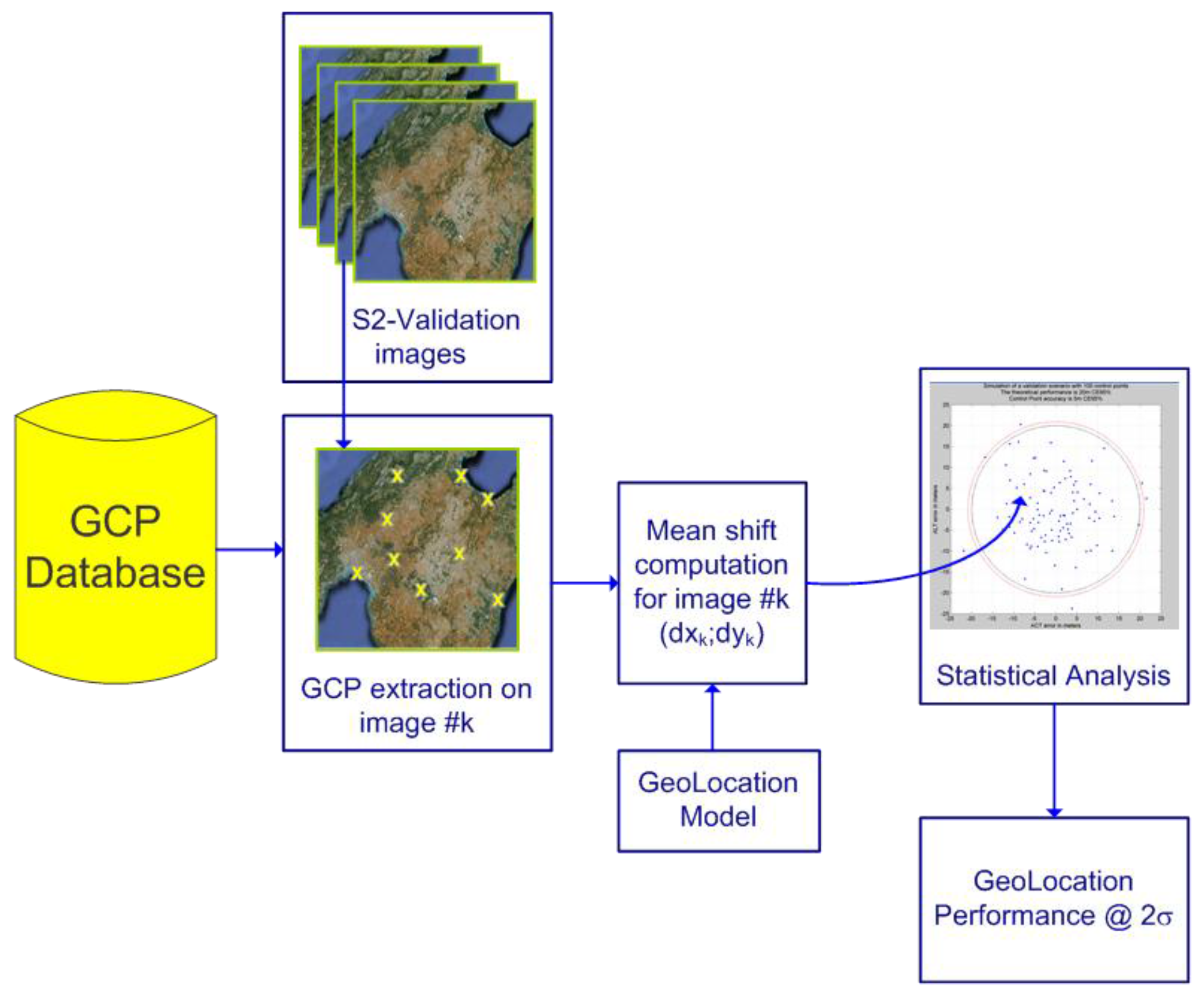
Figure 43.
General principle of geolocation uncertainty validation using ground control points. Mean shift computation is obtained by correlation technique.
Figure 43.
General principle of geolocation uncertainty validation using ground control points. Mean shift computation is obtained by correlation technique.
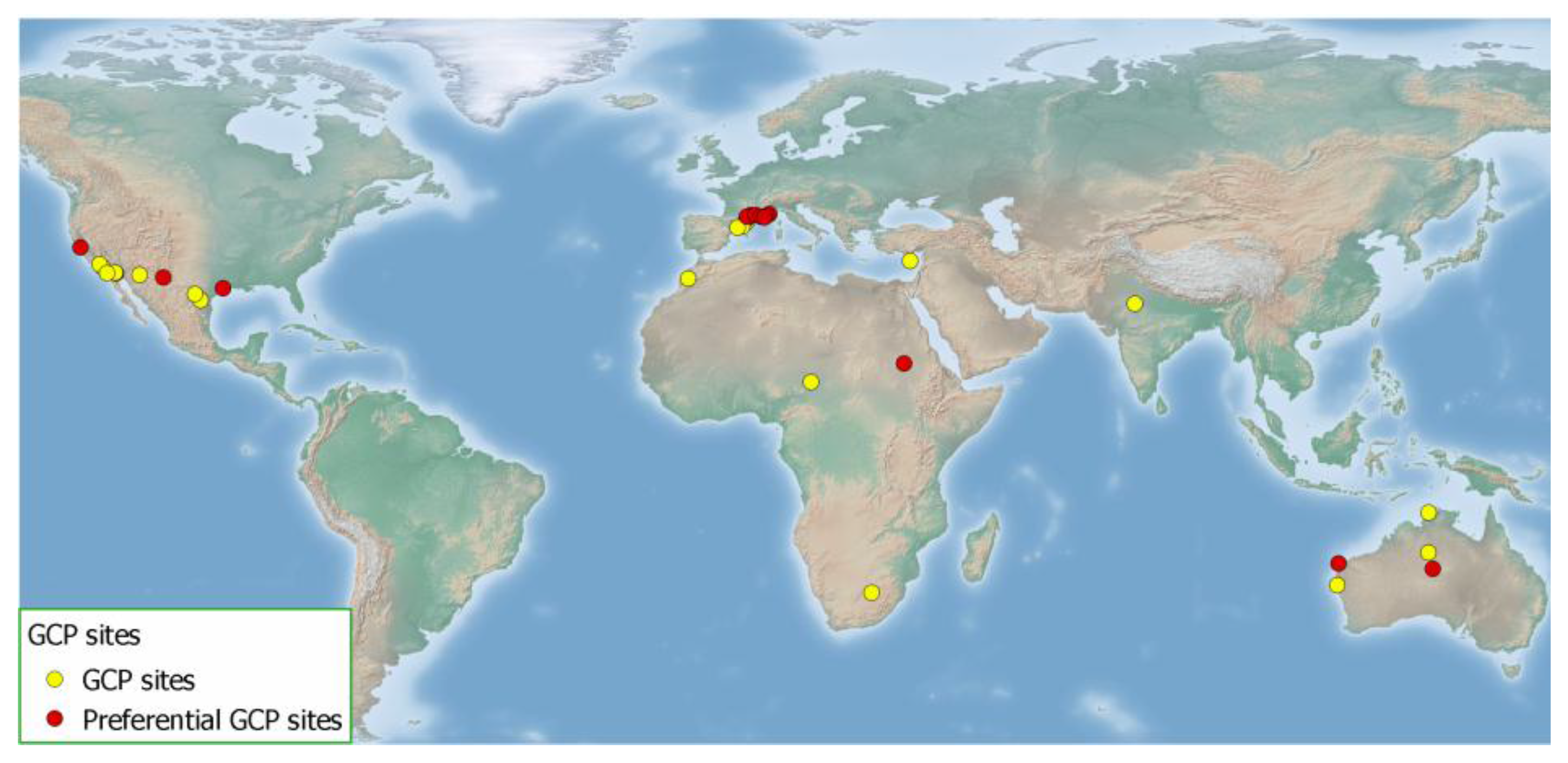
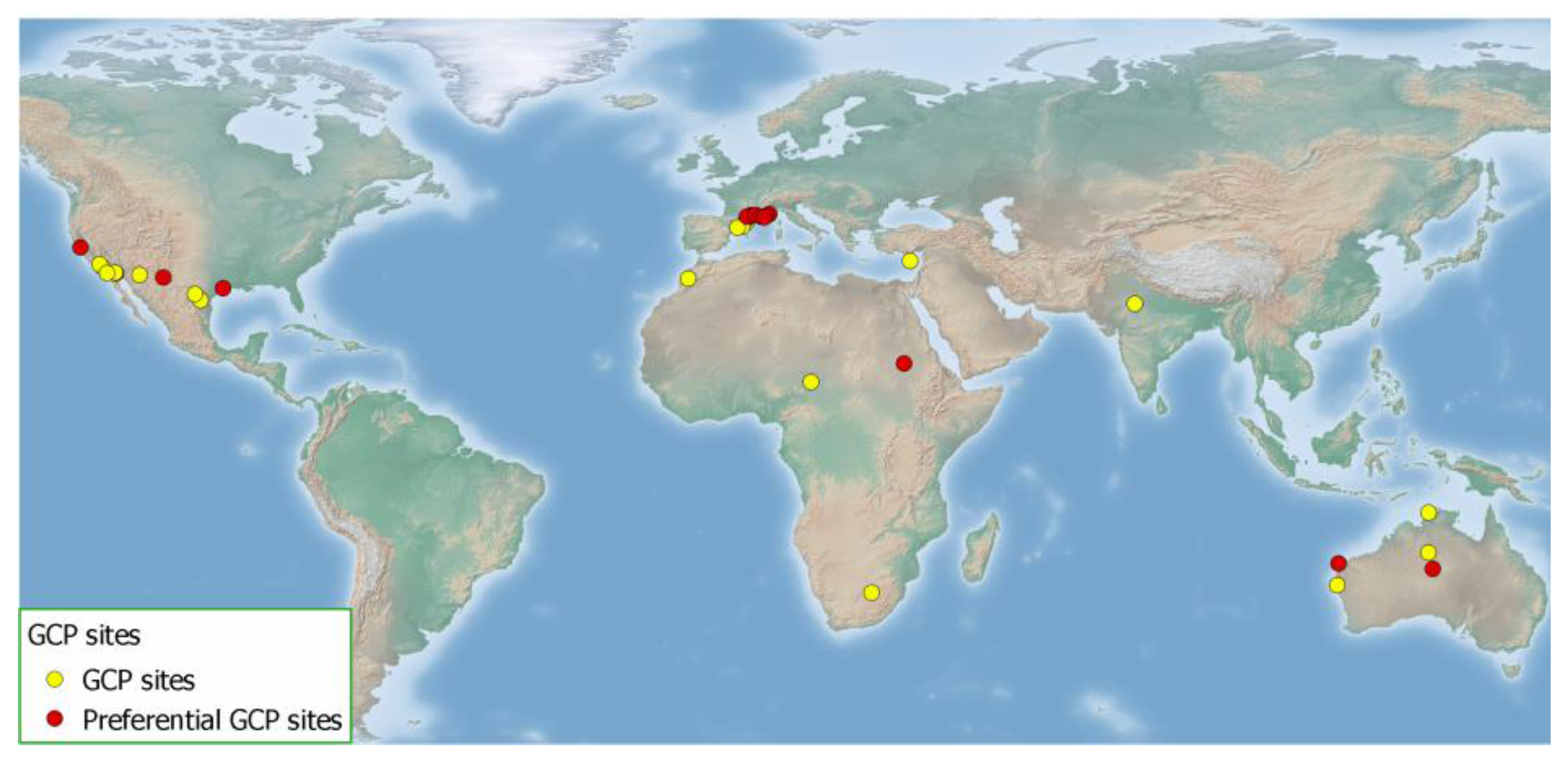
Figure 44.
Map of Thale Alenia Space GCP database sites (red dots are GCP sites currently available and used as baseline for S2 validation activities).
Figure 44.
Map of Thale Alenia Space GCP database sites (red dots are GCP sites currently available and used as baseline for S2 validation activities).
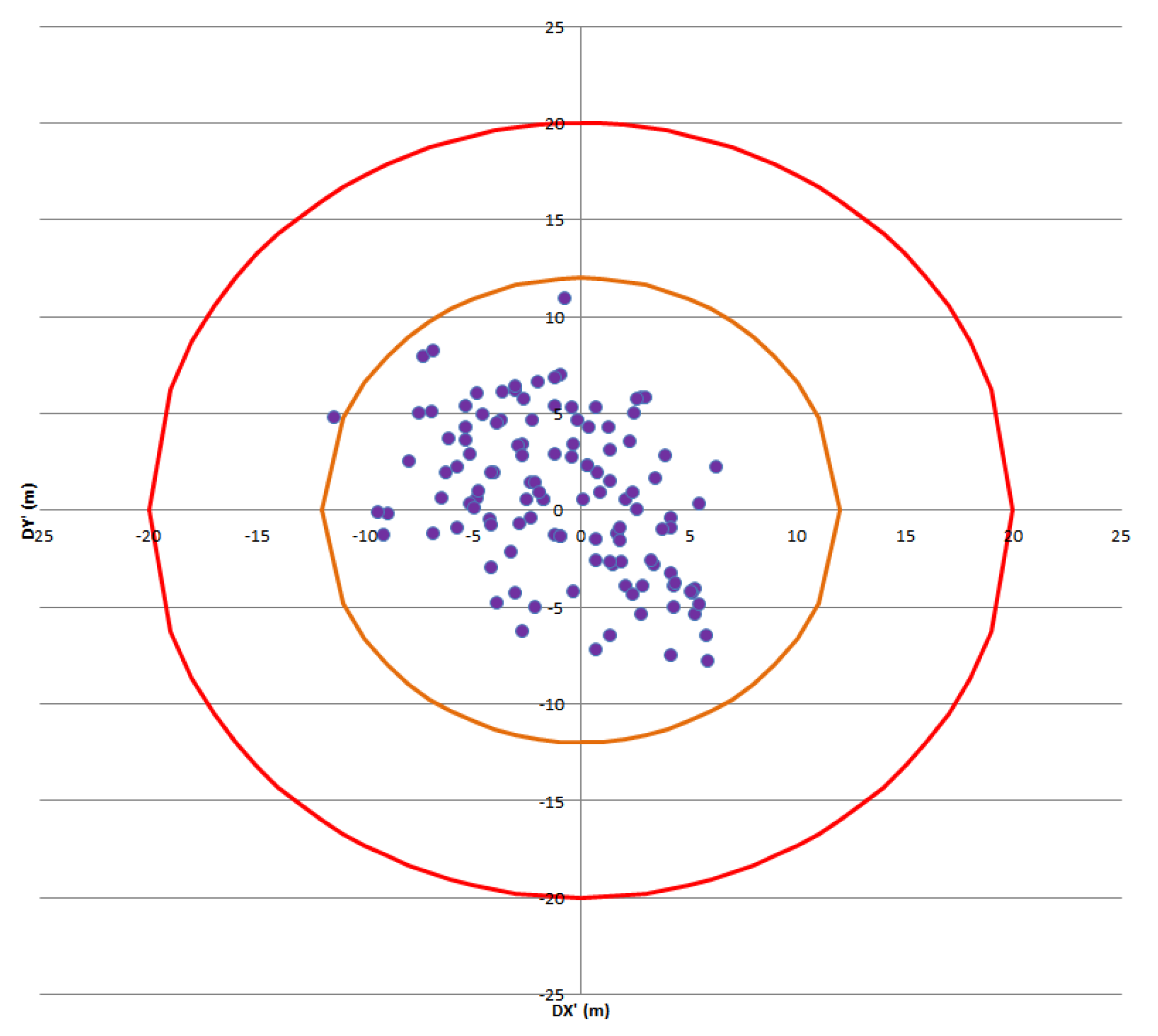
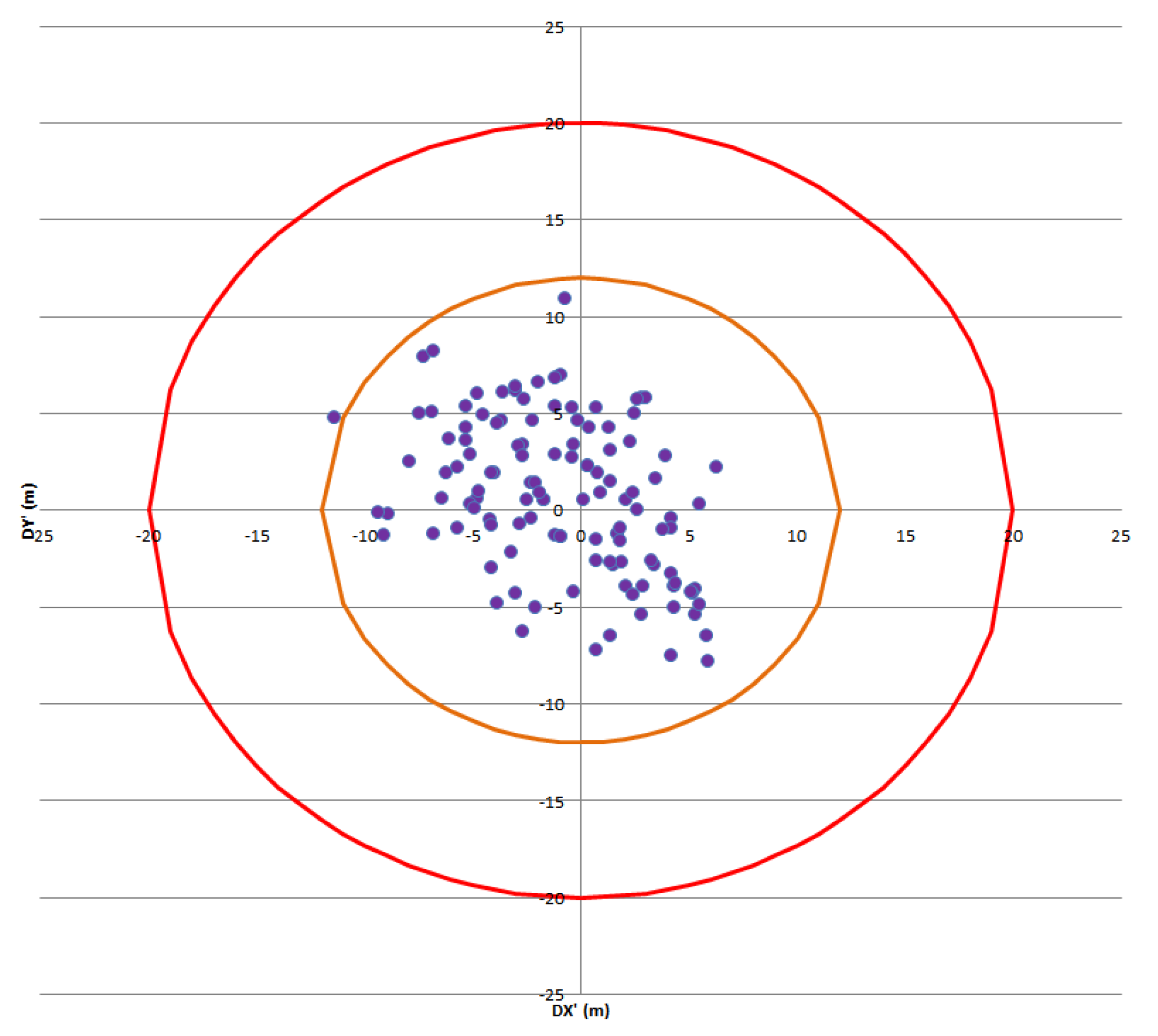
Figure 45.
System Geolocation Performances in metres (Band 04) for L1B non-refined products. Red (resp. orange) circle is the requirement without (res. with) geometric refinement on GCPs.
Figure 45.
System Geolocation Performances in metres (Band 04) for L1B non-refined products. Red (resp. orange) circle is the requirement without (res. with) geometric refinement on GCPs.
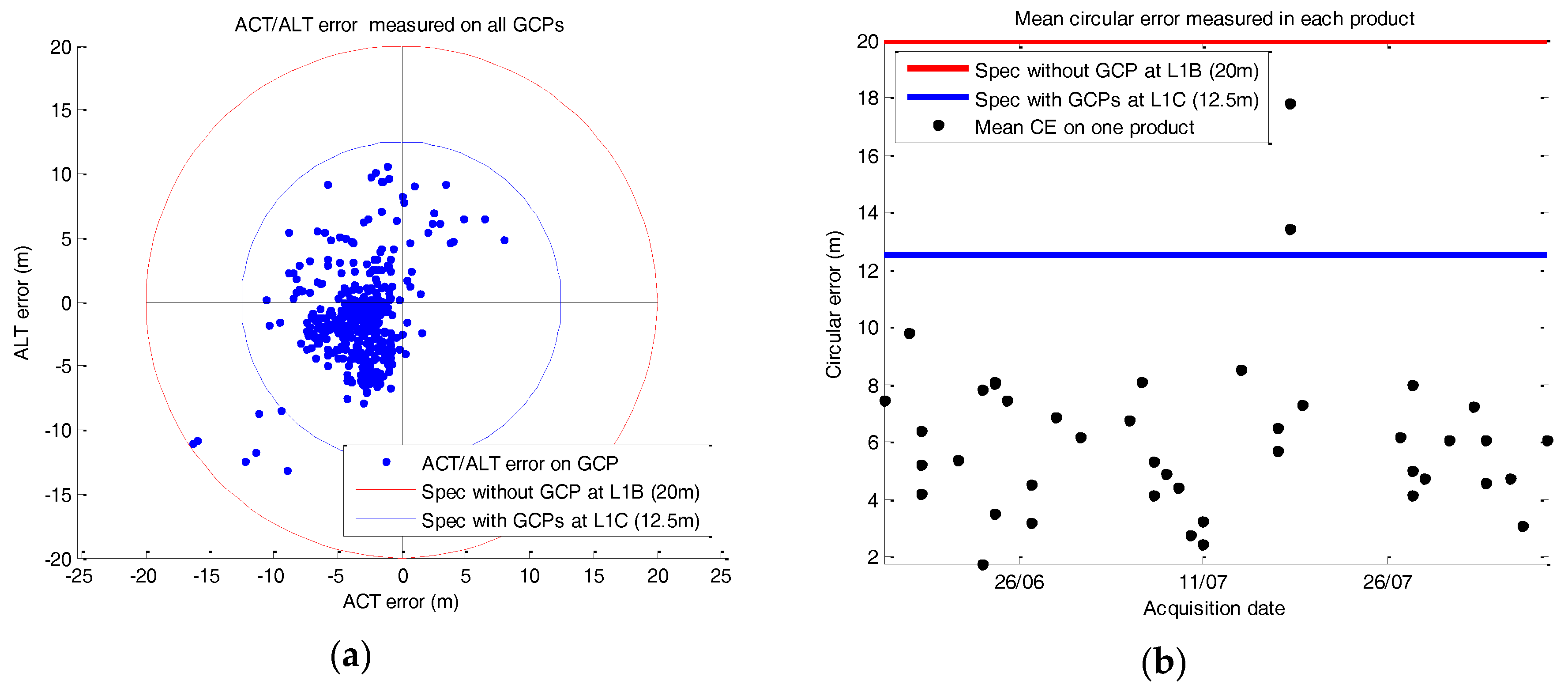
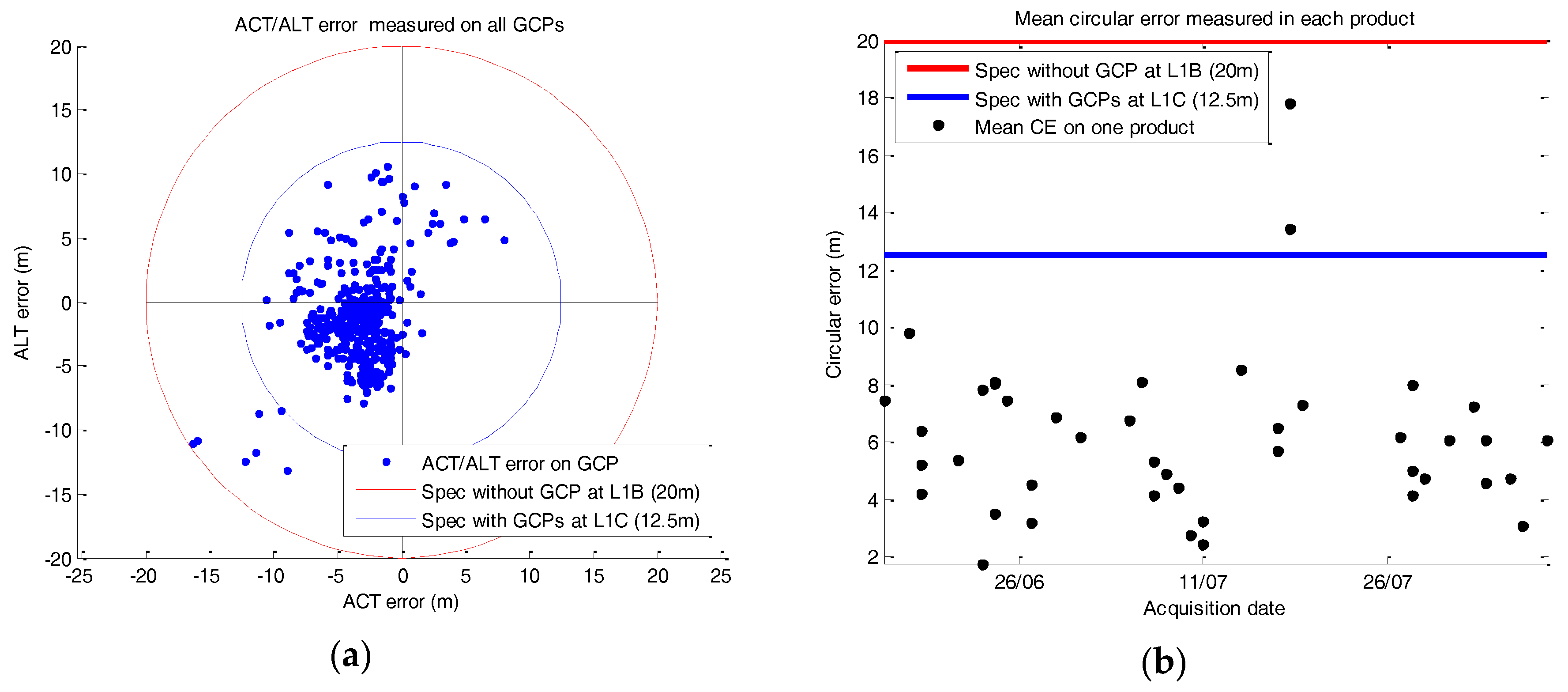
Figure 46.
System Geolocation Performances in metres for L1C non-refined products. Reference band is B04. (a) Geolocation error (in metre) along-track and across-track measured on each GCP; (b) Mean geolocation error in each product processed in function of the acquisition dates of the product. The two outliers seen on both figures correspond to products from orbit 5601 and are due to contingencies (star-tracker outage).
Figure 46.
System Geolocation Performances in metres for L1C non-refined products. Reference band is B04. (a) Geolocation error (in metre) along-track and across-track measured on each GCP; (b) Mean geolocation error in each product processed in function of the acquisition dates of the product. The two outliers seen on both figures correspond to products from orbit 5601 and are due to contingencies (star-tracker outage).
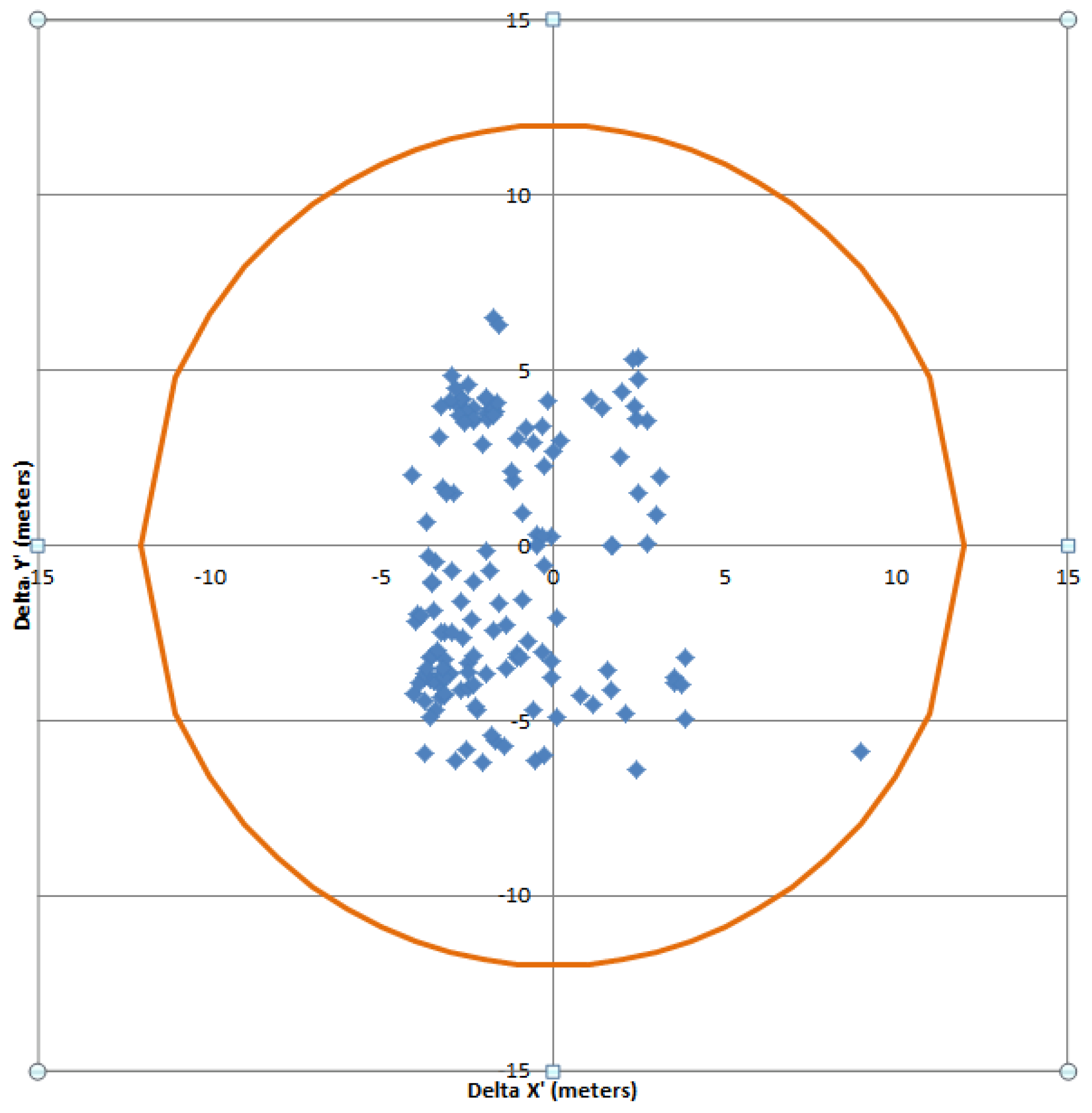
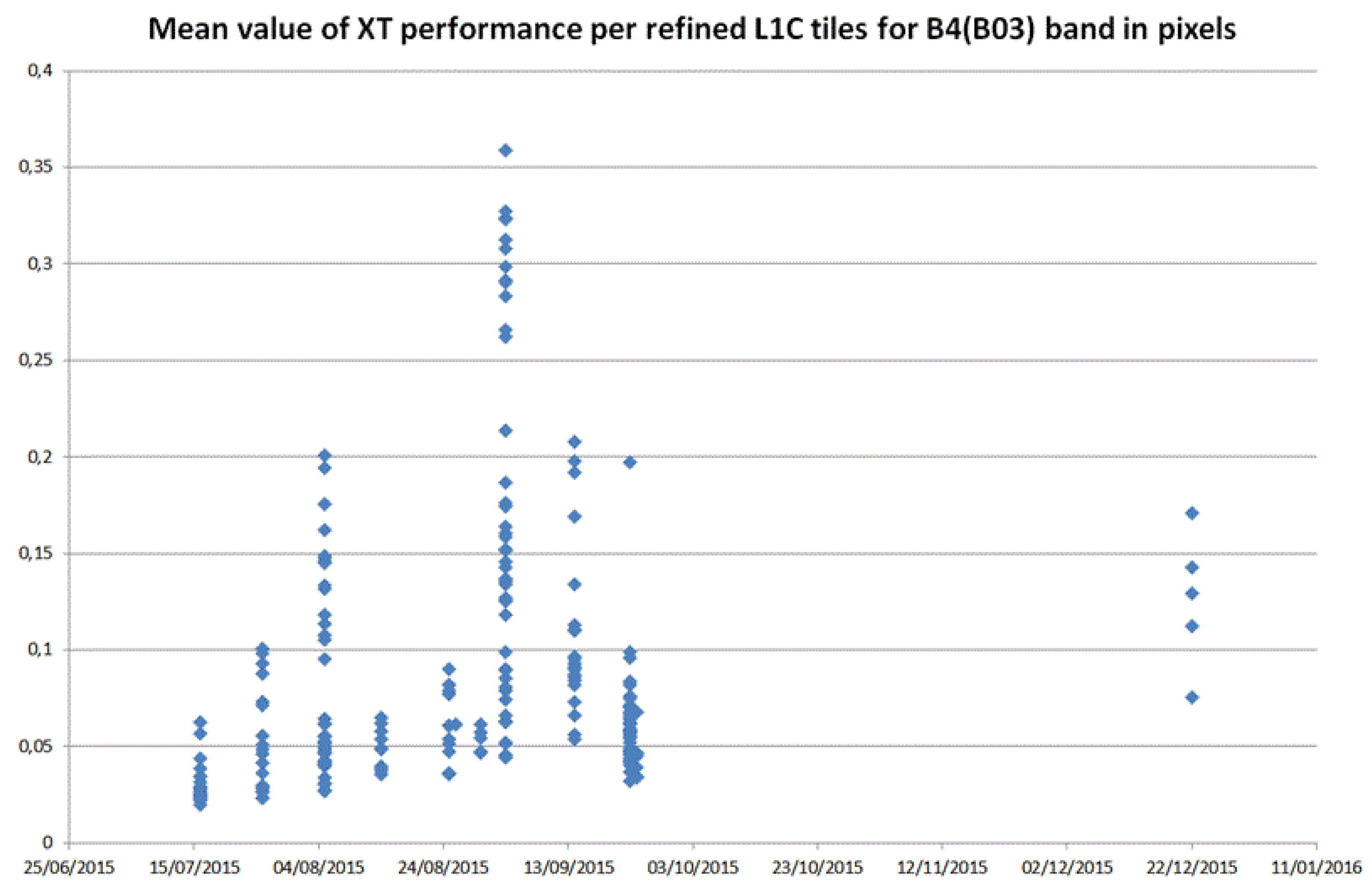
Figure 47.
Product Geolocation Performances in metres (Band 04) for L1C refined tiles. Orange circle is the requirement with geometric refinement on GCPs.
Figure 47.
Product Geolocation Performances in metres (Band 04) for L1C refined tiles. Orange circle is the requirement with geometric refinement on GCPs.
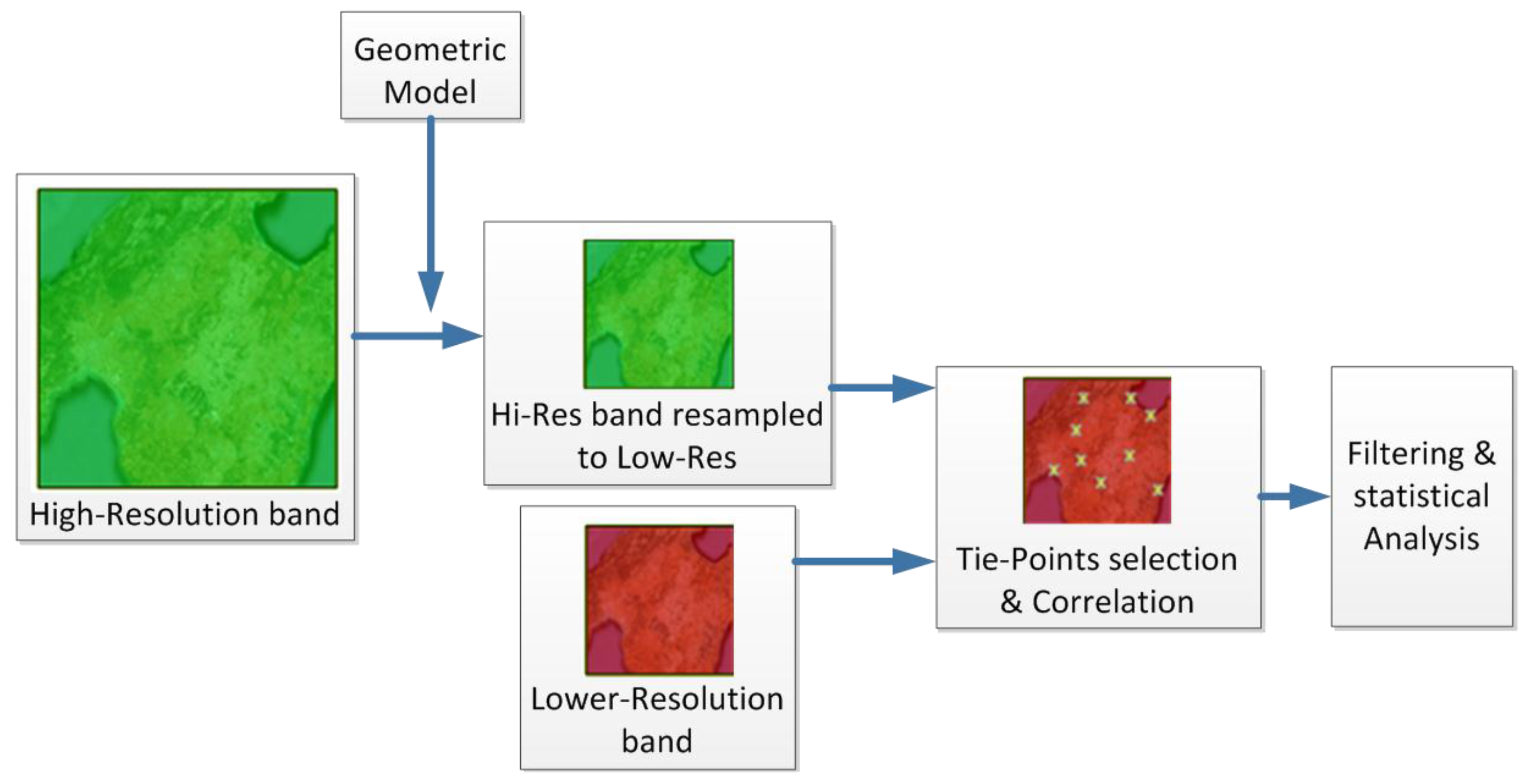
Figure 48.
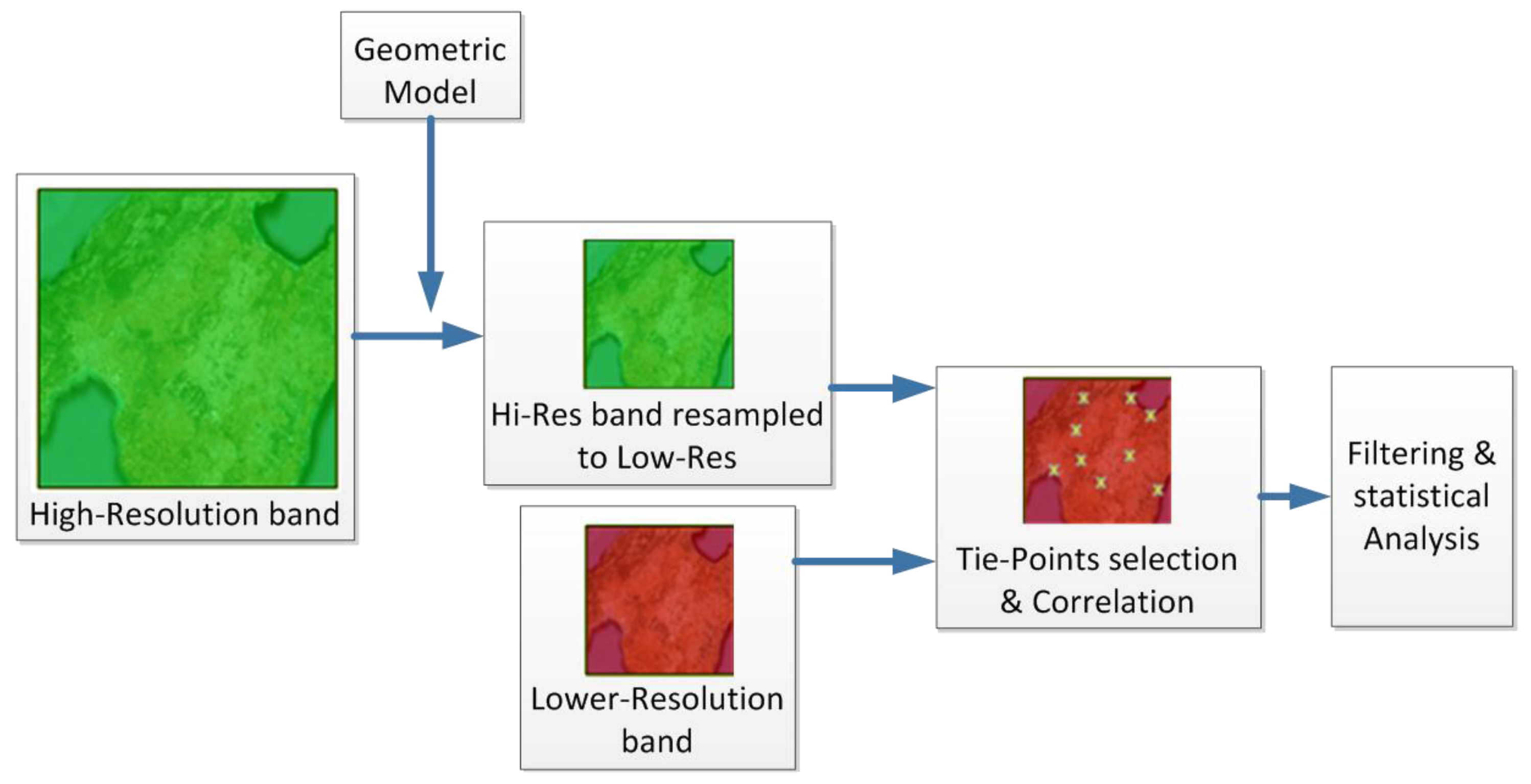
High-level principle of the multi-spectral registration uncertainty assessment.
Figure 48.
High-level principle of the multi-spectral registration uncertainty assessment.
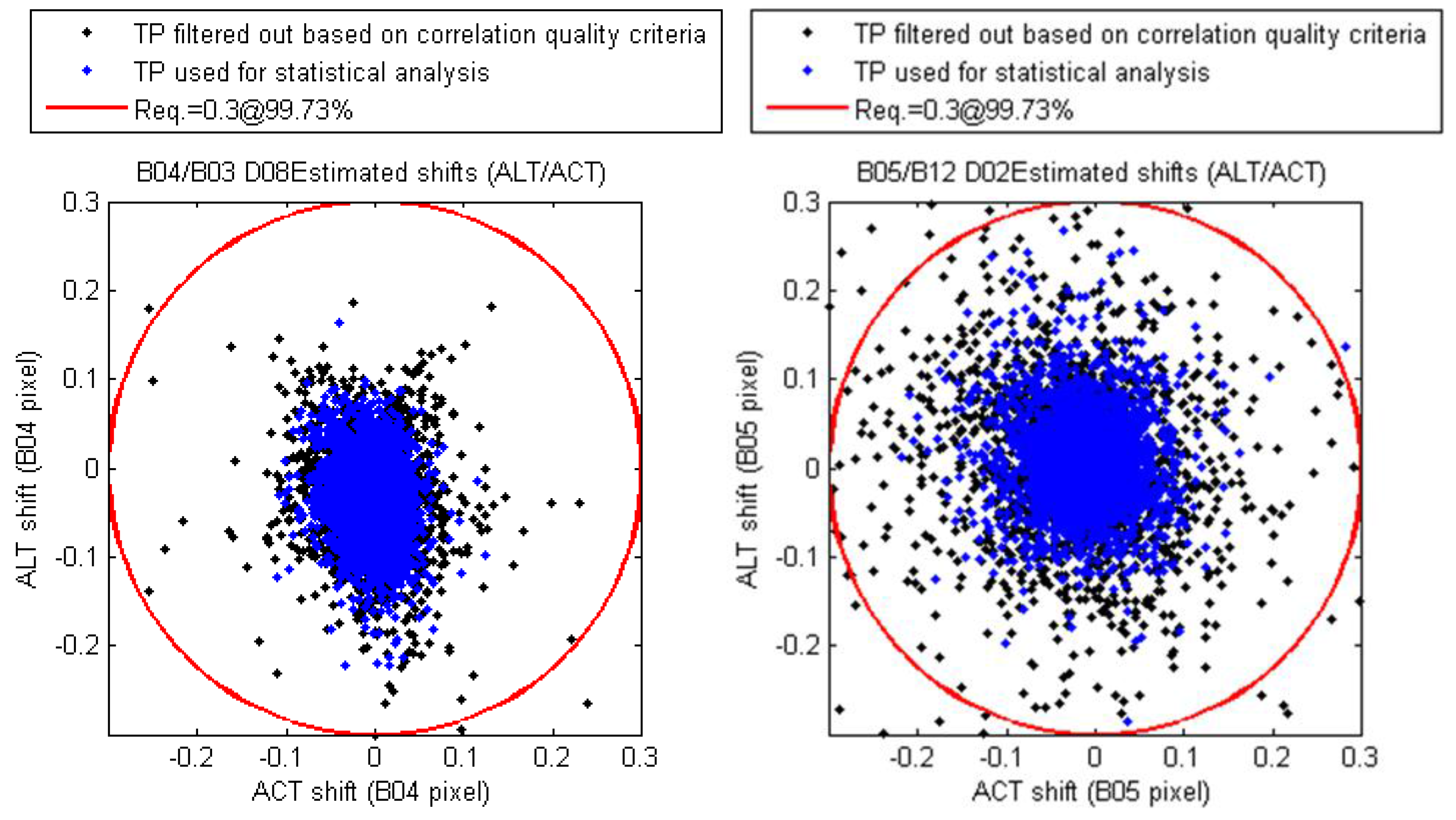
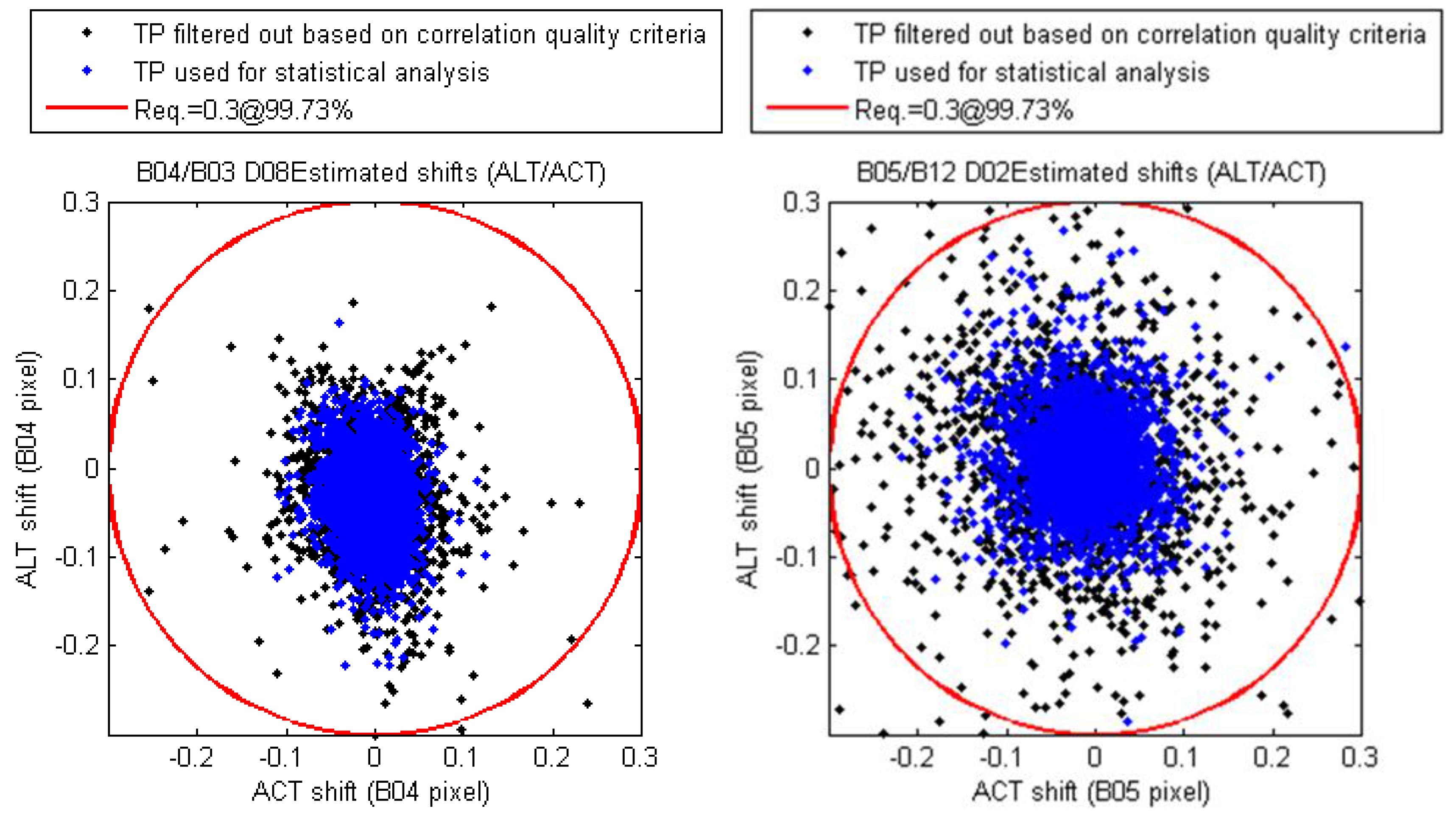
Figure 49.
Example of global mis-registration shifts measured on ‘Central Australia’ for B04/B03-Detector 08 and B05/B12-Detector 02. Black points are tie points rejected based on correlation quality criteria (step 4). Units are pixels of the coarser band in the couple.
Figure 49.
Example of global mis-registration shifts measured on ‘Central Australia’ for B04/B03-Detector 08 and B05/B12-Detector 02. Black points are tie points rejected based on correlation quality criteria (step 4). Units are pixels of the coarser band in the couple.
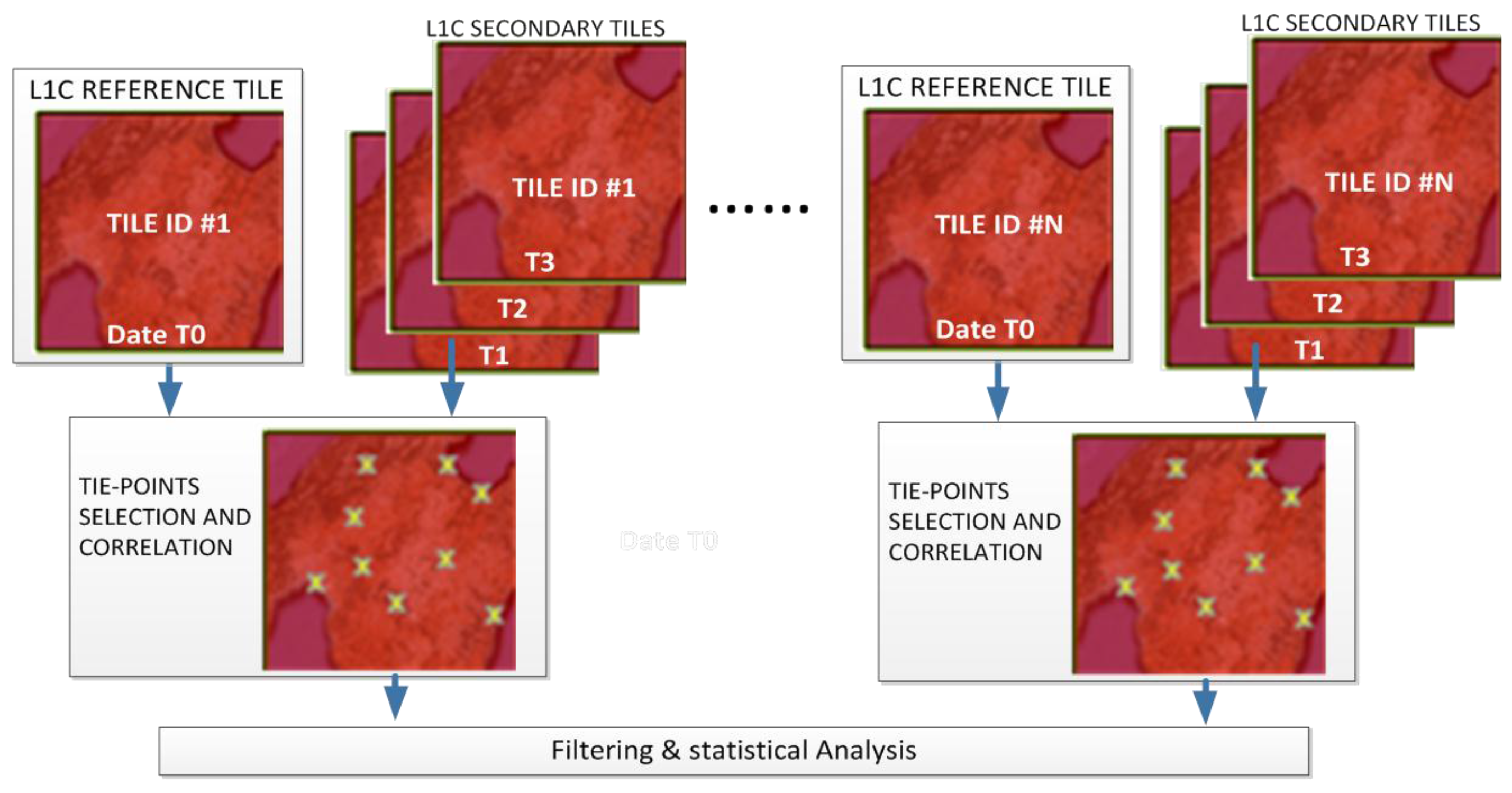
Figure 50.
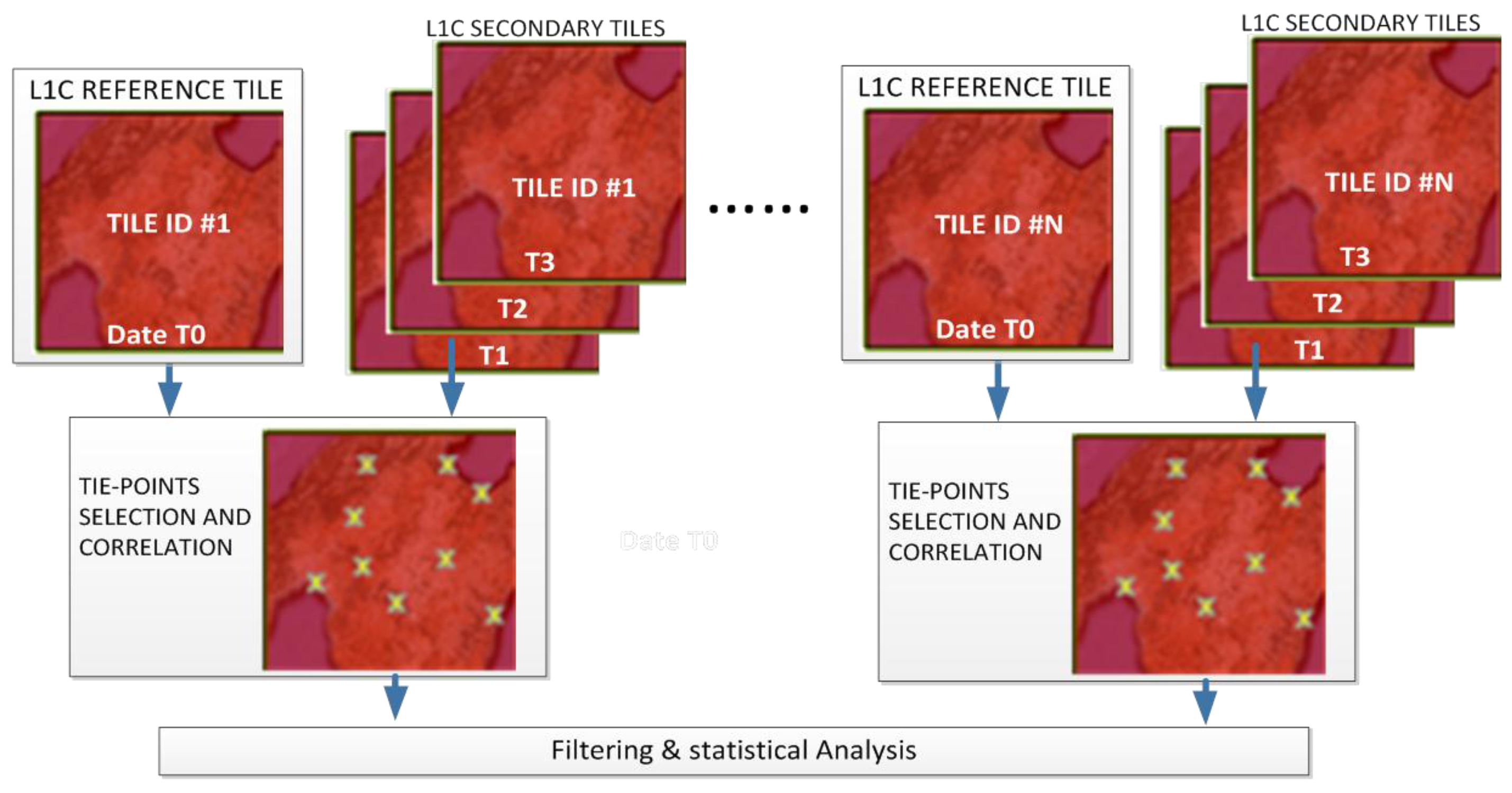
High-level principle of the multi-temporal registration uncertainty assessment.
Figure 50.
High-level principle of the multi-temporal registration uncertainty assessment.
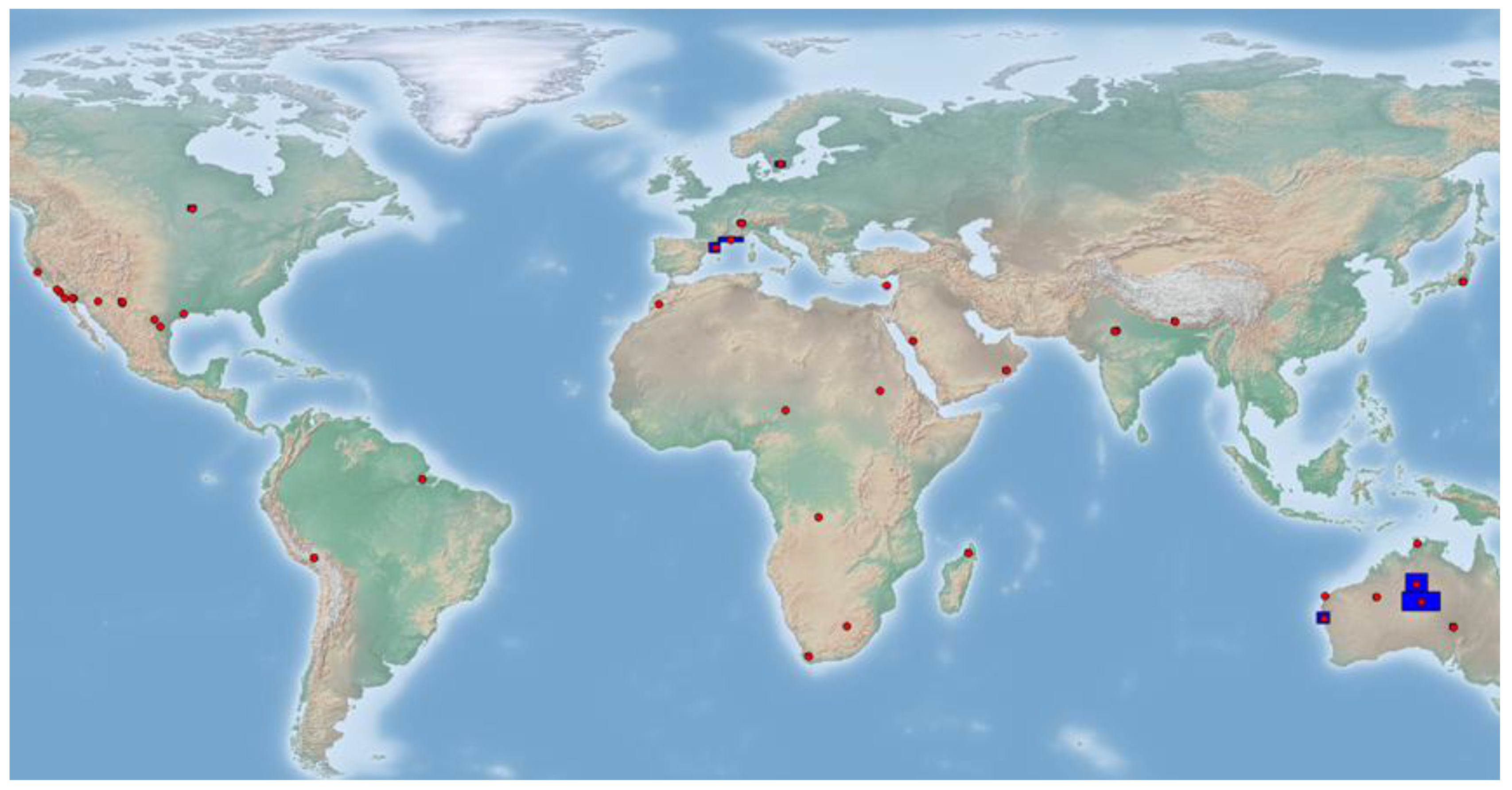
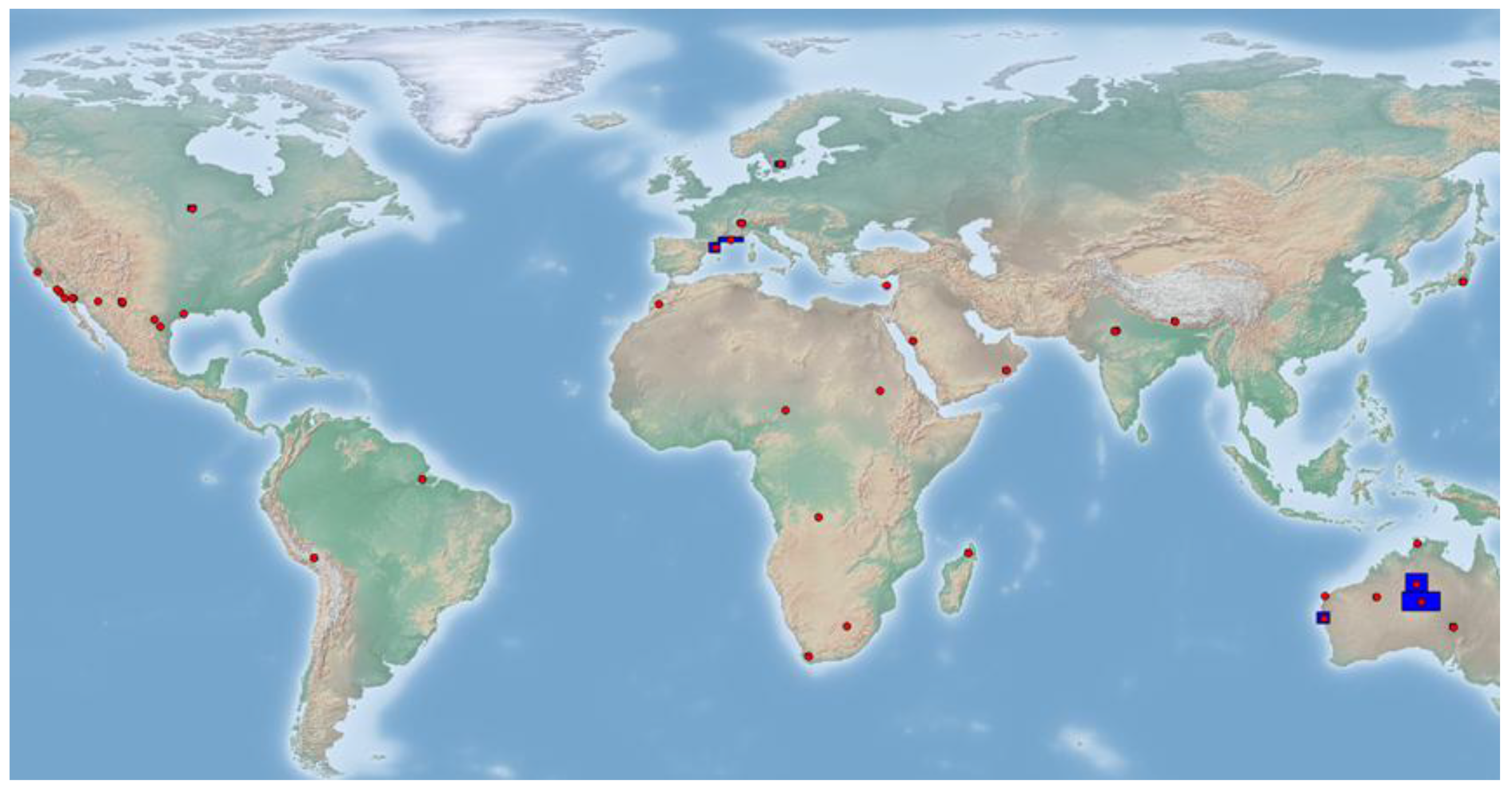
Figure 51.
Sites used for multi-temporal registration uncertainty validation on non-refined products (red points). They include the geolocation validation sites (in blue) and other sites specific for multi-temporal registration assessment.
Figure 51.
Sites used for multi-temporal registration uncertainty validation on non-refined products (red points). They include the geolocation validation sites (in blue) and other sites specific for multi-temporal registration assessment.
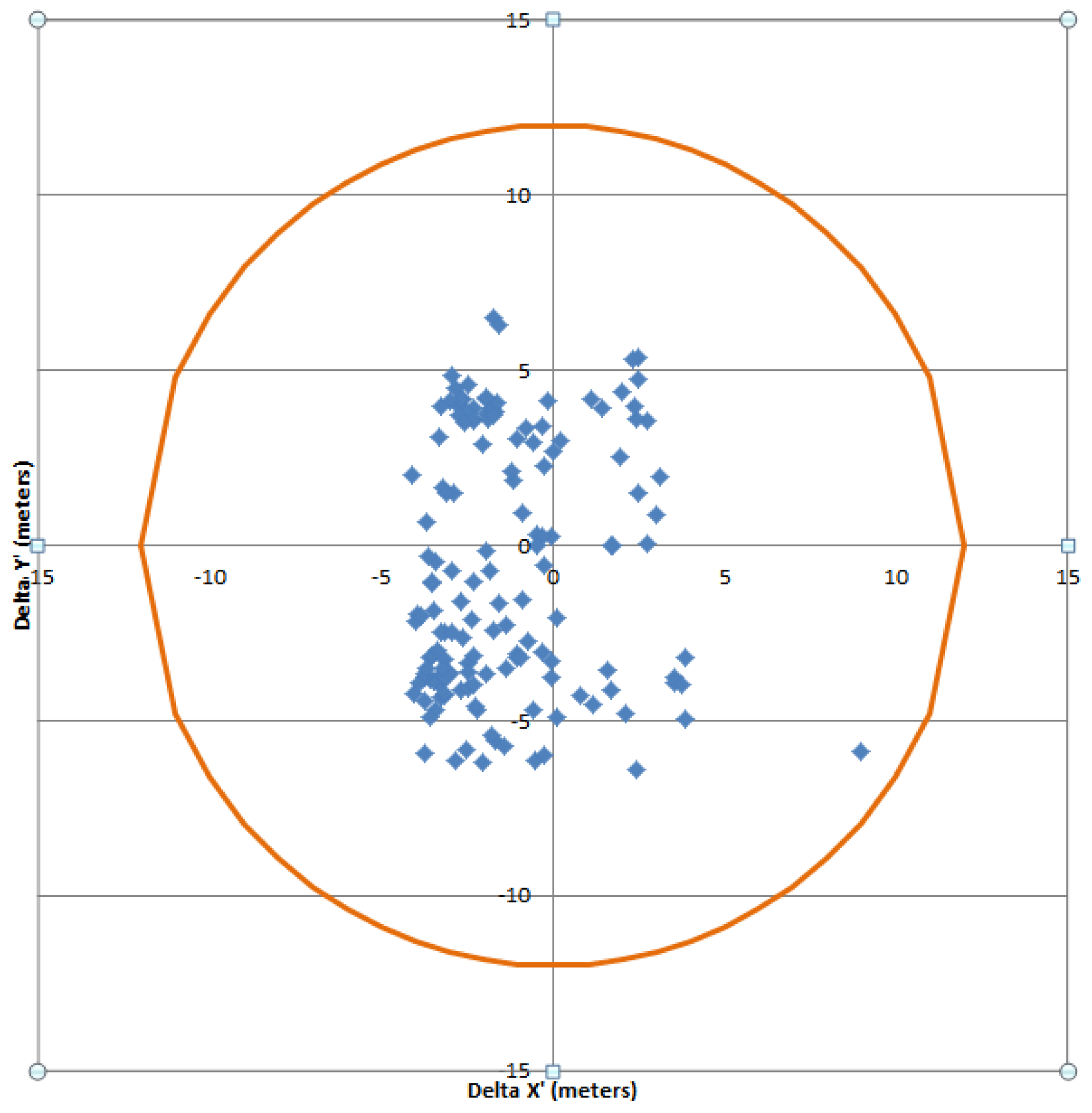
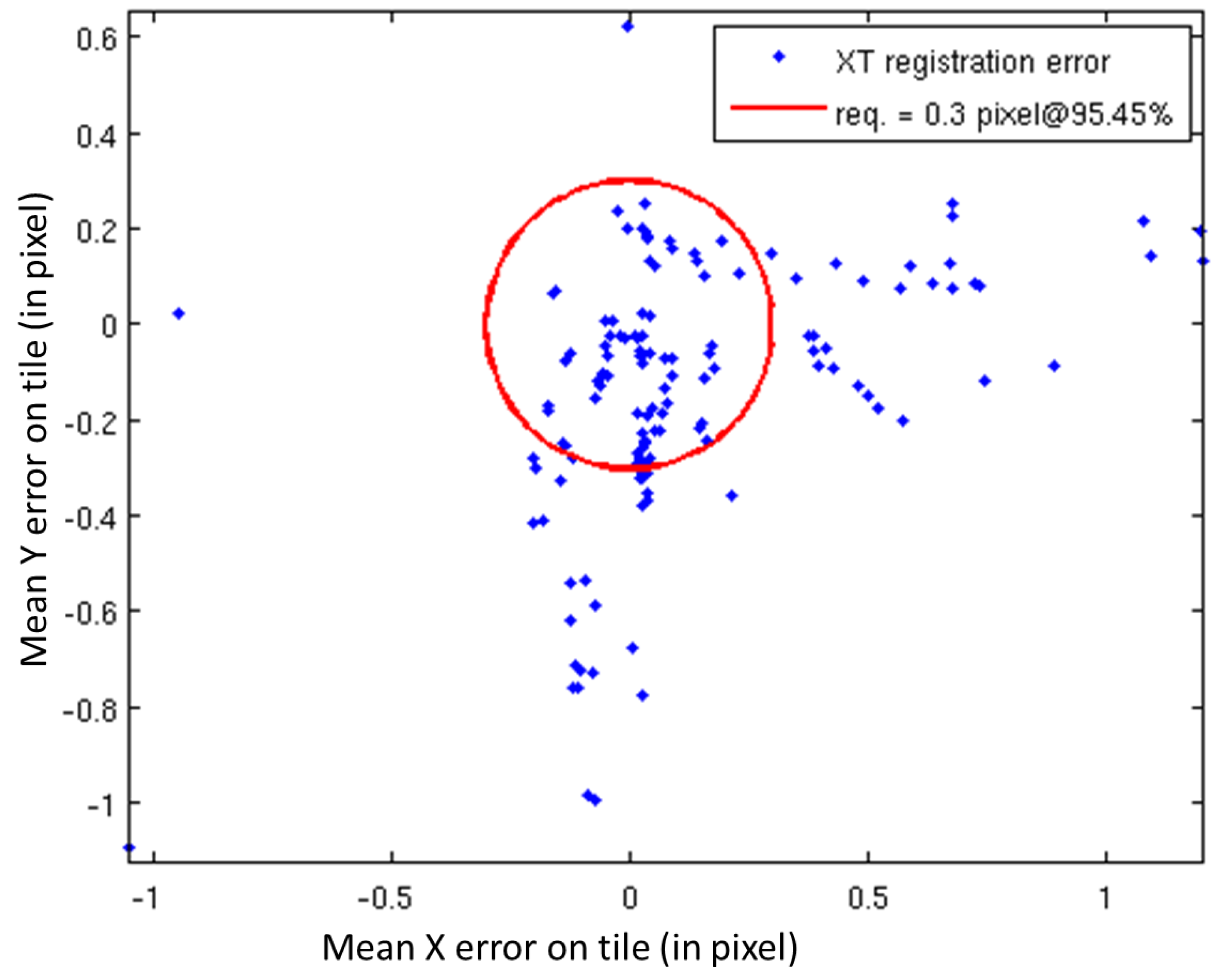
Figure 52.
Multi-temporal registration uncertainty. Each point represents the average X shift and Y shift measure in one secondary tile with respect to the reference tile.
Figure 52.
Multi-temporal registration uncertainty. Each point represents the average X shift and Y shift measure in one secondary tile with respect to the reference tile.
Figure 53.
Areas used for multi-temporal registration uncertainty validation on refined products.
Figure 53.
Areas used for multi-temporal registration uncertainty validation on refined products.
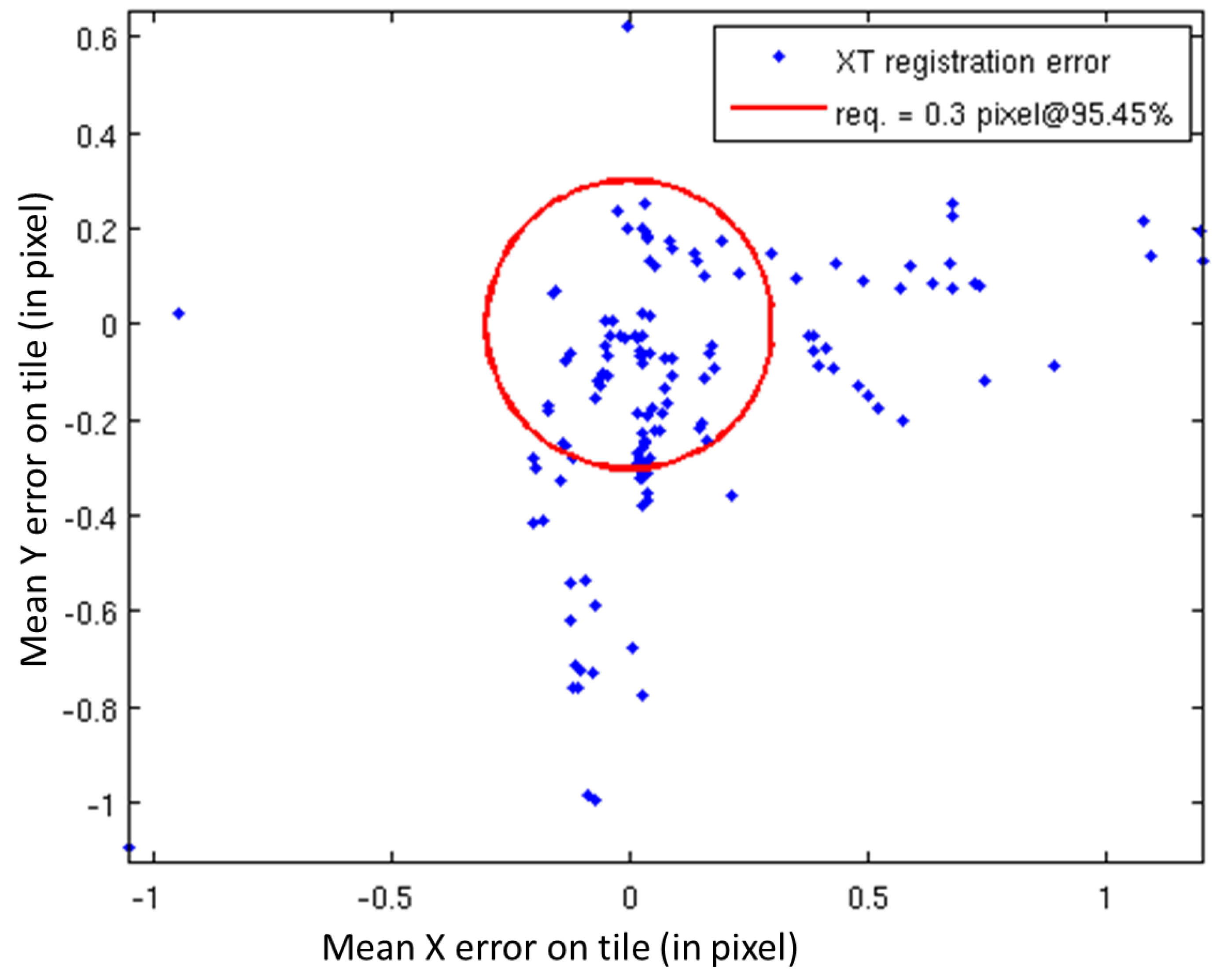
Figure 54.
Multi-temporal (XT) registration uncertainty for B04 band. Each point represents the average shift measured in one secondary tile with respect to the reference tile.
Figure 54.
Multi-temporal (XT) registration uncertainty for B04 band. Each point represents the average shift measured in one secondary tile with respect to the reference tile.
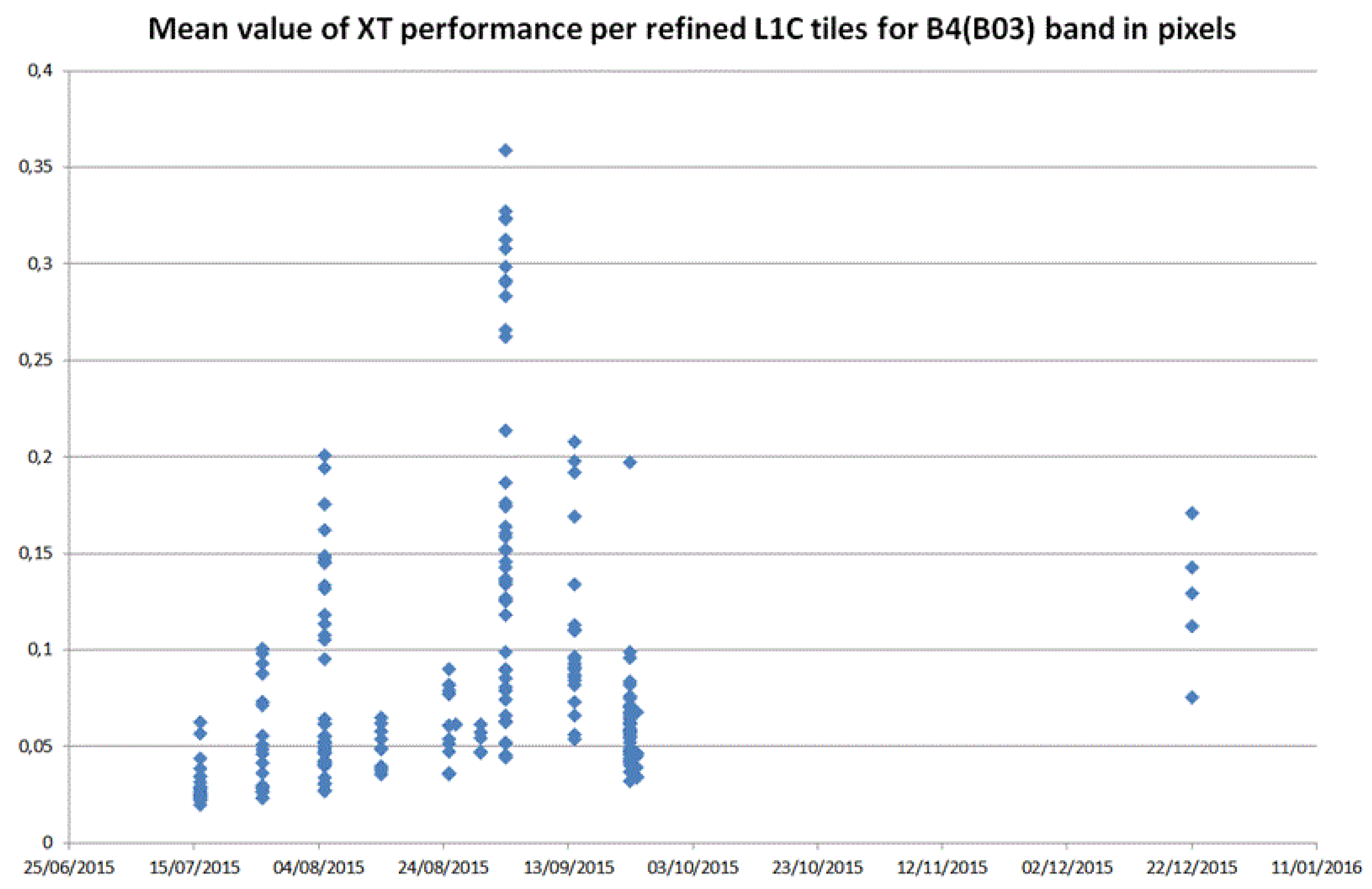
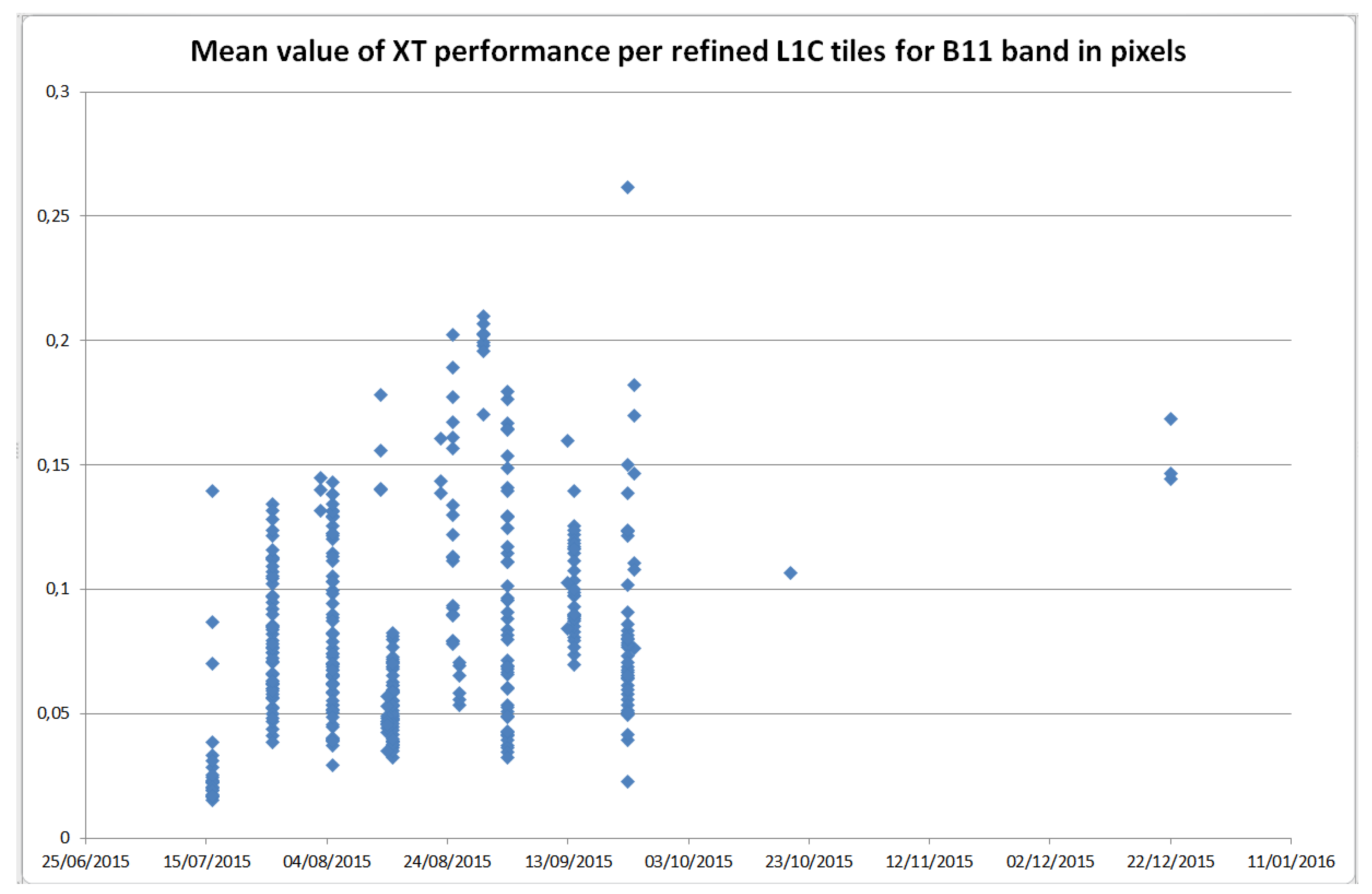
Figure 55.
Multi-temporal (XT) registration uncertainty for B11 band. Each point represents the average shift measured in one secondary tile with respect to the reference tile.
Figure 55.
Multi-temporal (XT) registration uncertainty for B11 band. Each point represents the average shift measured in one secondary tile with respect to the reference tile.
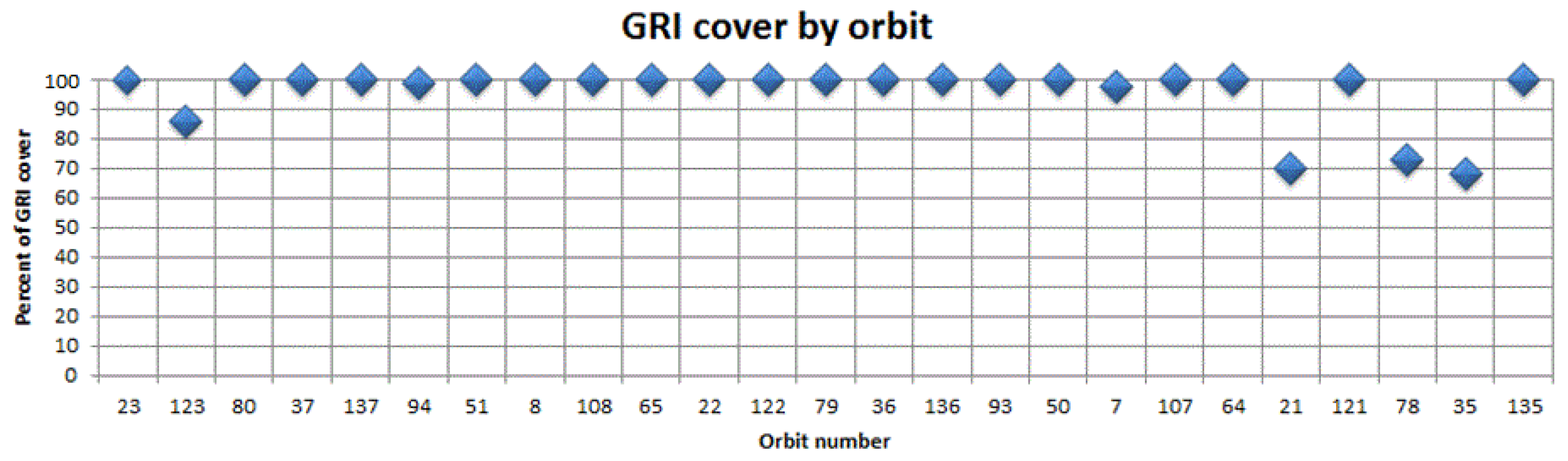
Figure 56.
Coverage percentage of Europe GRI versus relative orbit number.
Figure 56.
Coverage percentage of Europe GRI versus relative orbit number.
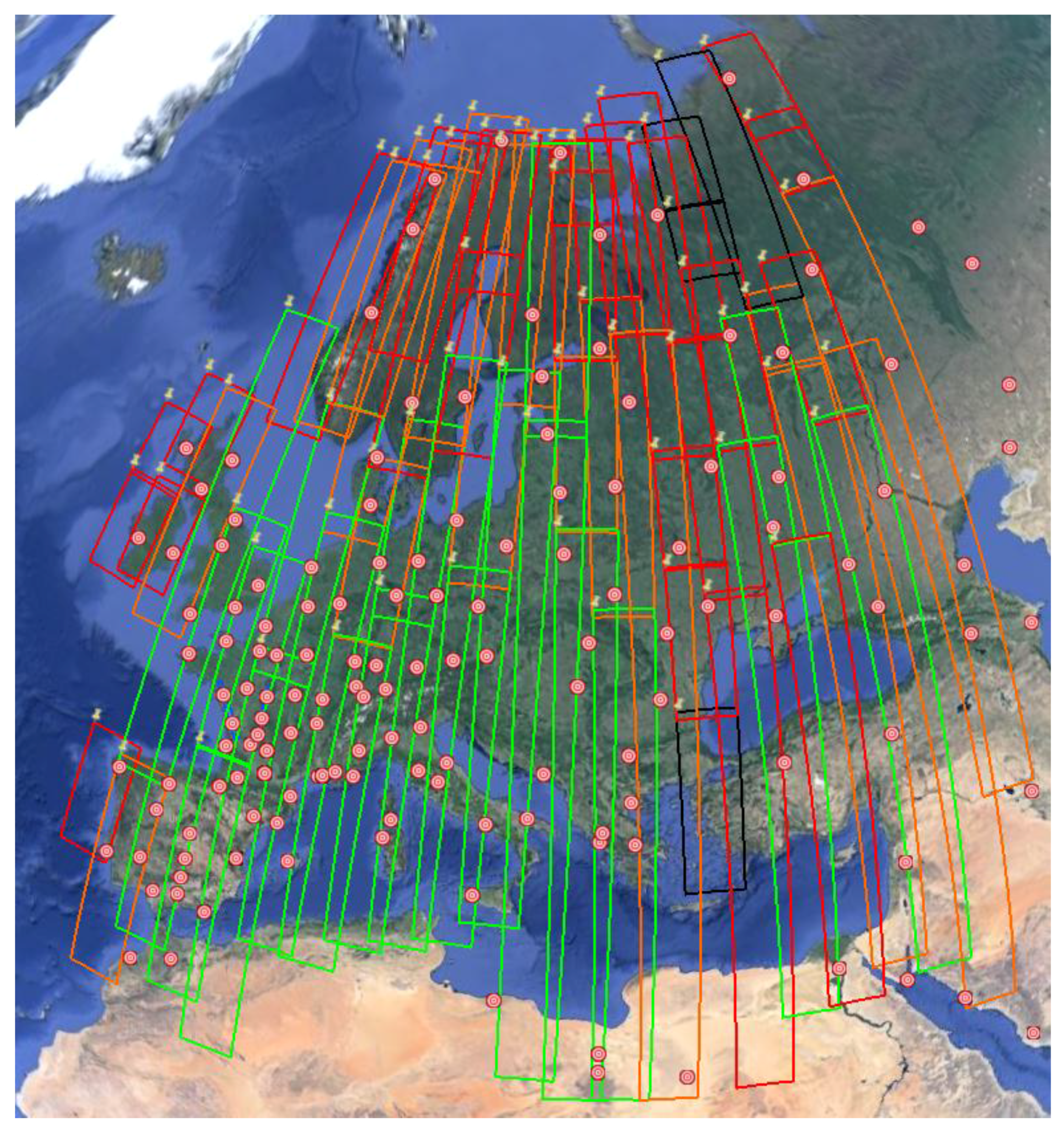
Figure 57.
European GRI product strips according to Pleiades references.
Figure 57.
European GRI product strips according to Pleiades references.
Figure 58.
European GRI product geolocation performance.
Figure 58.
European GRI product geolocation performance.
Figure 59.
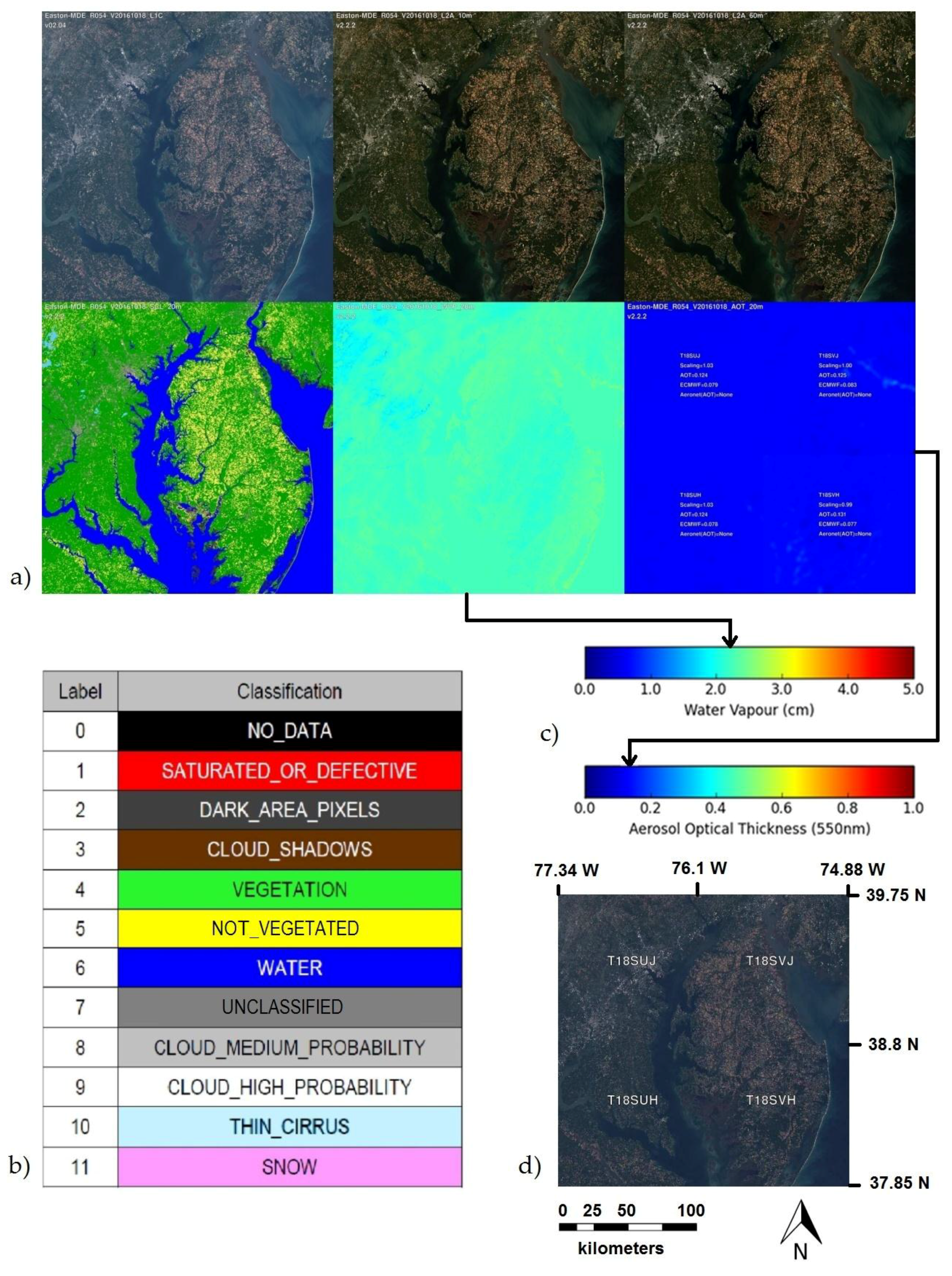
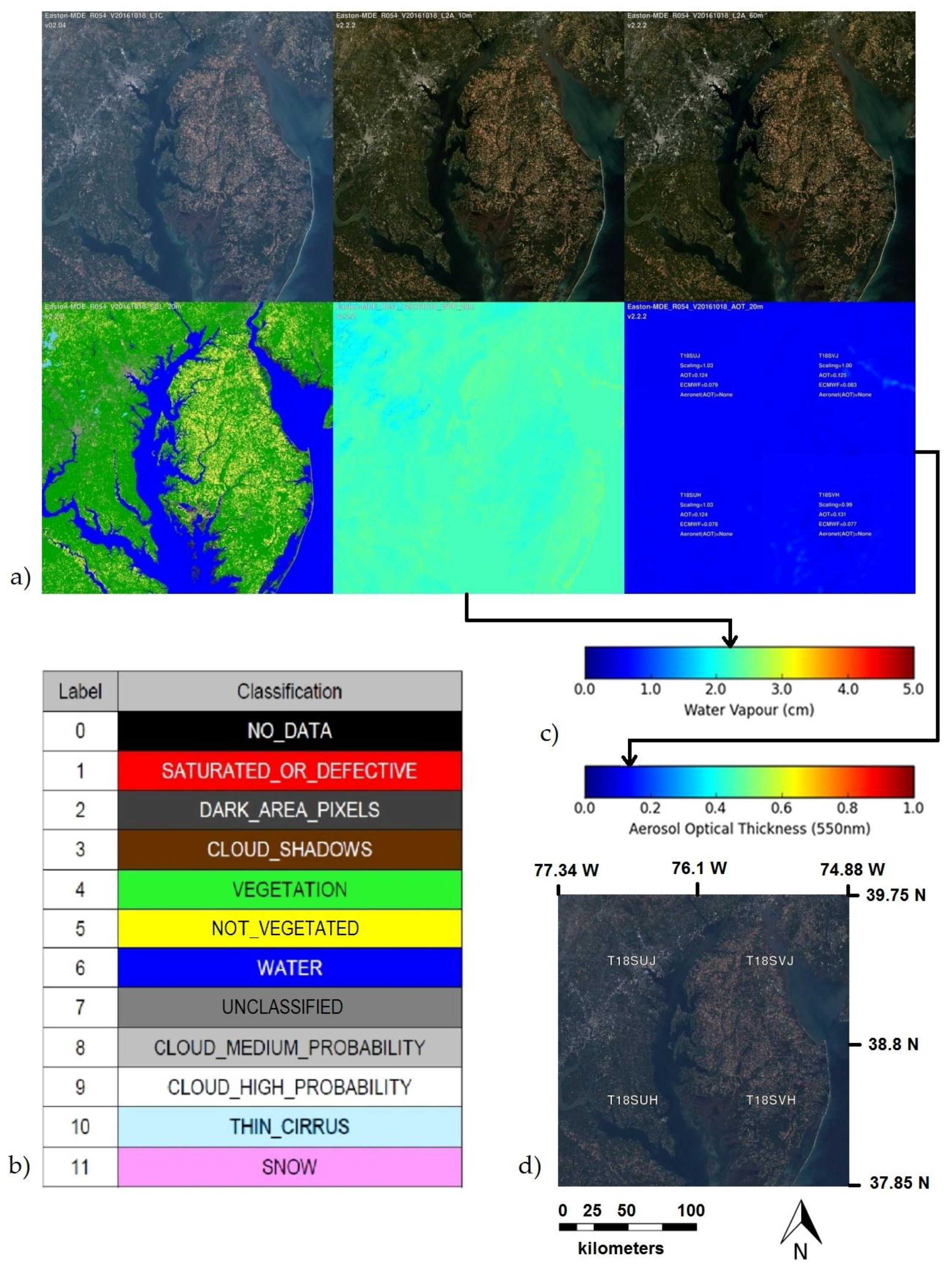
(a) Level-2A product example. Aeronet site Easton-Maryland-Department-Environment (USA), acquired on October 18, 2016, characterized by MidlatitudeN, Flat terrain, Forest, Croplands, Water, Urban. (Top) RGB compositions (B04, B03, B02) for L1C TOA, L2A Surface Reflectance (SR) at 10 m, L2A SR at 60 m; (Bottom) Scene Classification, L2A Water Vapour at 20 m, L2A Aerosol Optical Thickness (AOT) at 20 m. (b) Cloud Screening and Scene Classification (SCL) pixel legend; (c) Colour tables for Total Water Vapour Column and Aerosol Optical Thickness at 550 nm; (d) Scale, north arrow and coordinates of the four product granules.
Figure 59.
(a) Level-2A product example. Aeronet site Easton-Maryland-Department-Environment (USA), acquired on October 18, 2016, characterized by MidlatitudeN, Flat terrain, Forest, Croplands, Water, Urban. (Top) RGB compositions (B04, B03, B02) for L1C TOA, L2A Surface Reflectance (SR) at 10 m, L2A SR at 60 m; (Bottom) Scene Classification, L2A Water Vapour at 20 m, L2A Aerosol Optical Thickness (AOT) at 20 m. (b) Cloud Screening and Scene Classification (SCL) pixel legend; (c) Colour tables for Total Water Vapour Column and Aerosol Optical Thickness at 550 nm; (d) Scale, north arrow and coordinates of the four product granules.
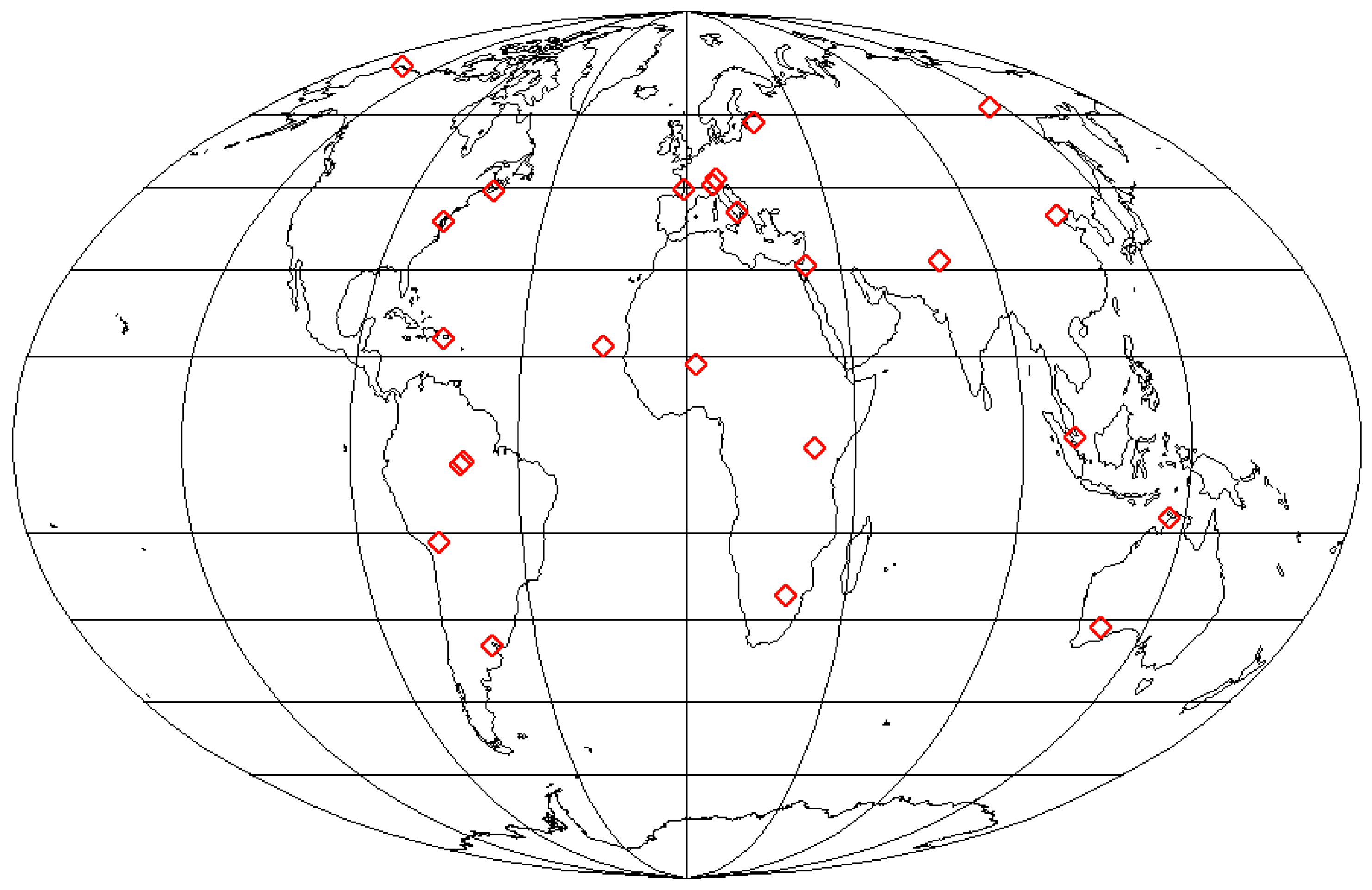
Figure 60.
Geographical distribution of the 24 selected AERONET test sites for the Level-2A Calibration.
Figure 60.
Geographical distribution of the 24 selected AERONET test sites for the Level-2A Calibration.
Figure 61.
(a) Cloud shadows classification; (b) Topographic shadows classification.
Figure 61.
(a) Cloud shadows classification; (b) Topographic shadows classification.
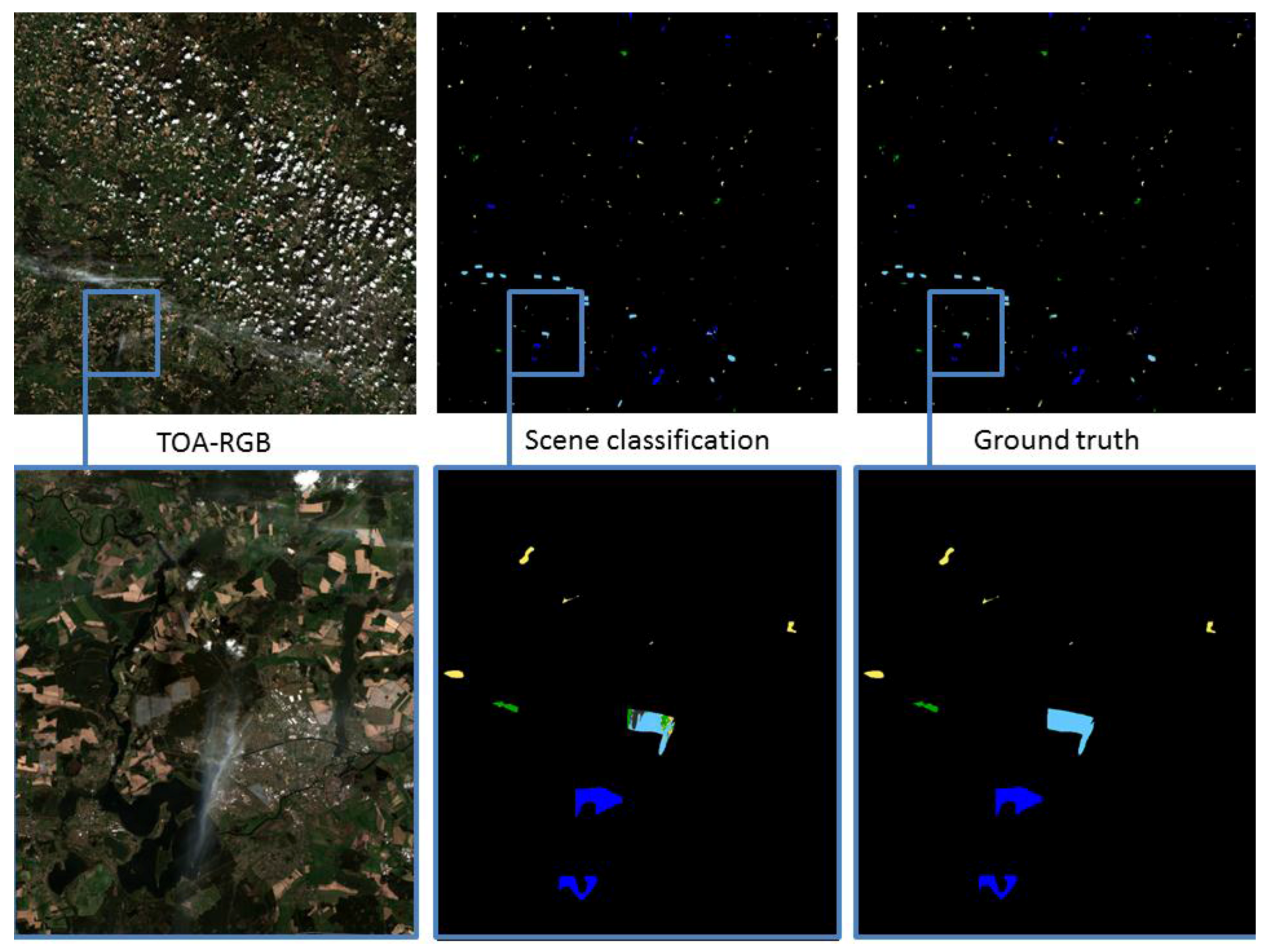
Figure 62.
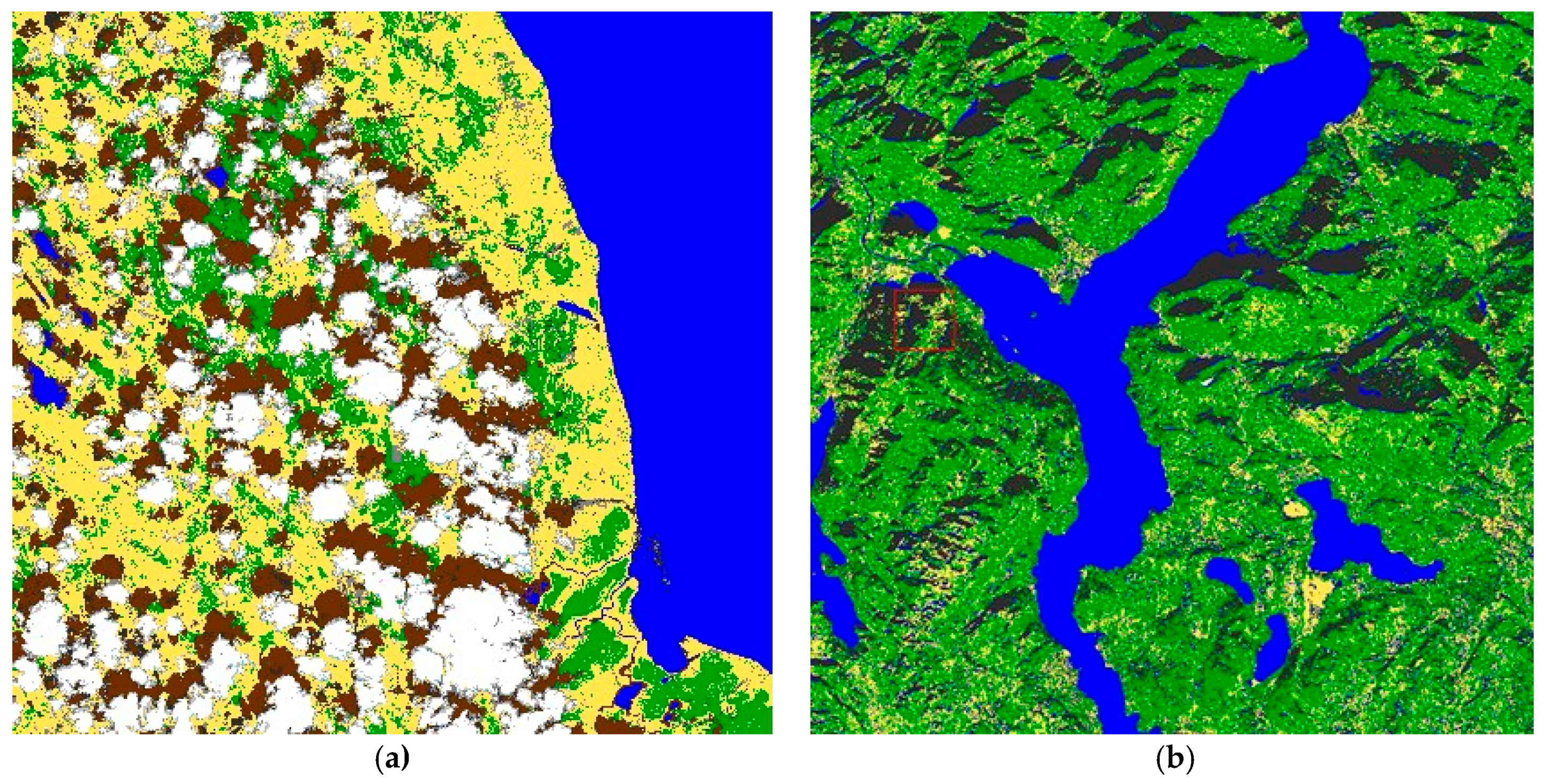
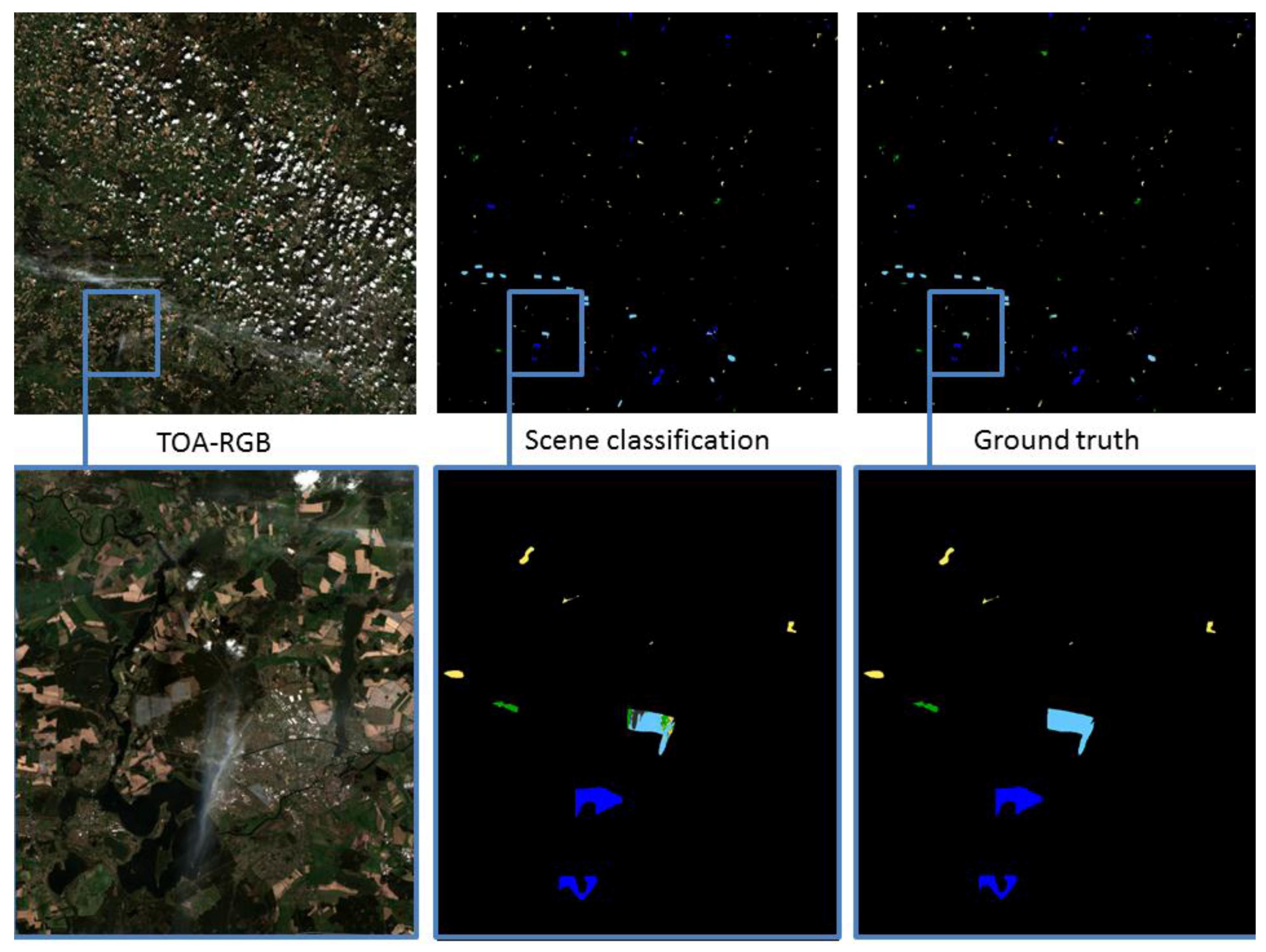
Example images for Cloud Screening and Classification Validation analysis, Site Potsdam (Germany), acquired on April 22, 2016, characterized by temperate climate zone and flat terrain. Whole granule at the top and zoomed area at the bottom.
Figure 62.
Example images for Cloud Screening and Classification Validation analysis, Site Potsdam (Germany), acquired on April 22, 2016, characterized by temperate climate zone and flat terrain. Whole granule at the top and zoomed area at the bottom.
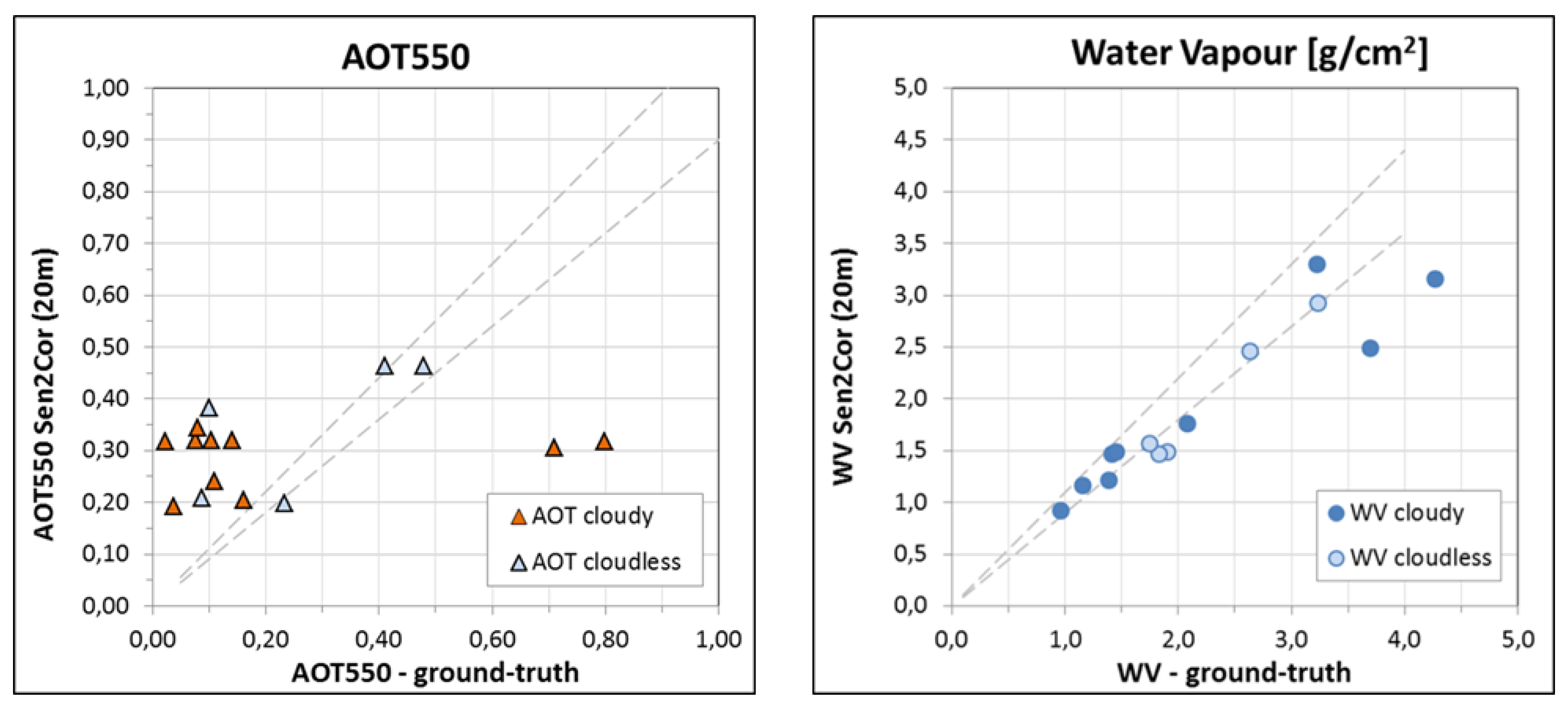
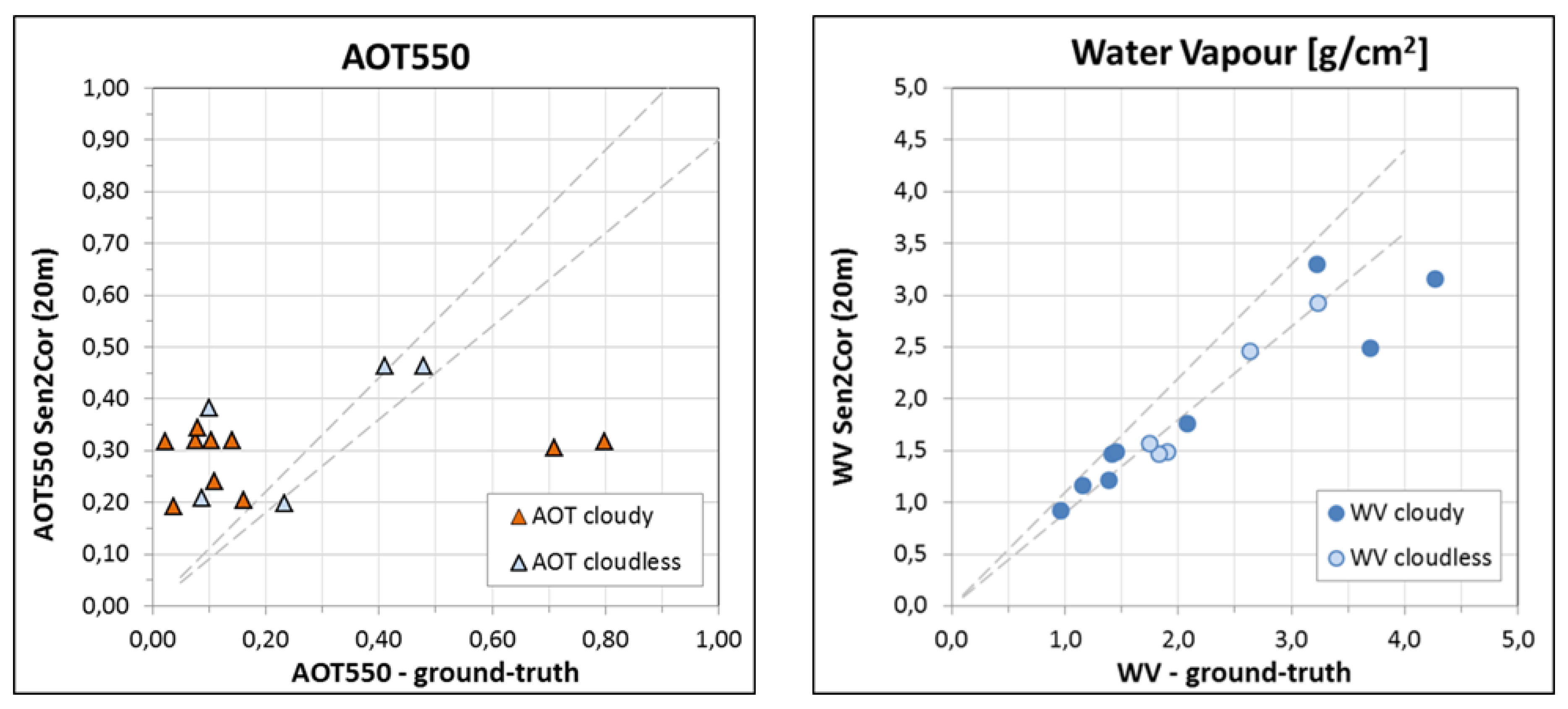
Figure 63.
AOT and Water Vapour (WV) Validation. Direct comparison of Sen2Cor with ground reference from AERONET. Sen2Cor is represented by average over 9 km × 9 km area with AERONET sunphotometer in the centre. Filled symbols represent samples with cloudiness >5% and not filled with cloudiness <5%.
Figure 63.
AOT and Water Vapour (WV) Validation. Direct comparison of Sen2Cor with ground reference from AERONET. Sen2Cor is represented by average over 9 km × 9 km area with AERONET sunphotometer in the centre. Filled symbols represent samples with cloudiness >5% and not filled with cloudiness <5%.
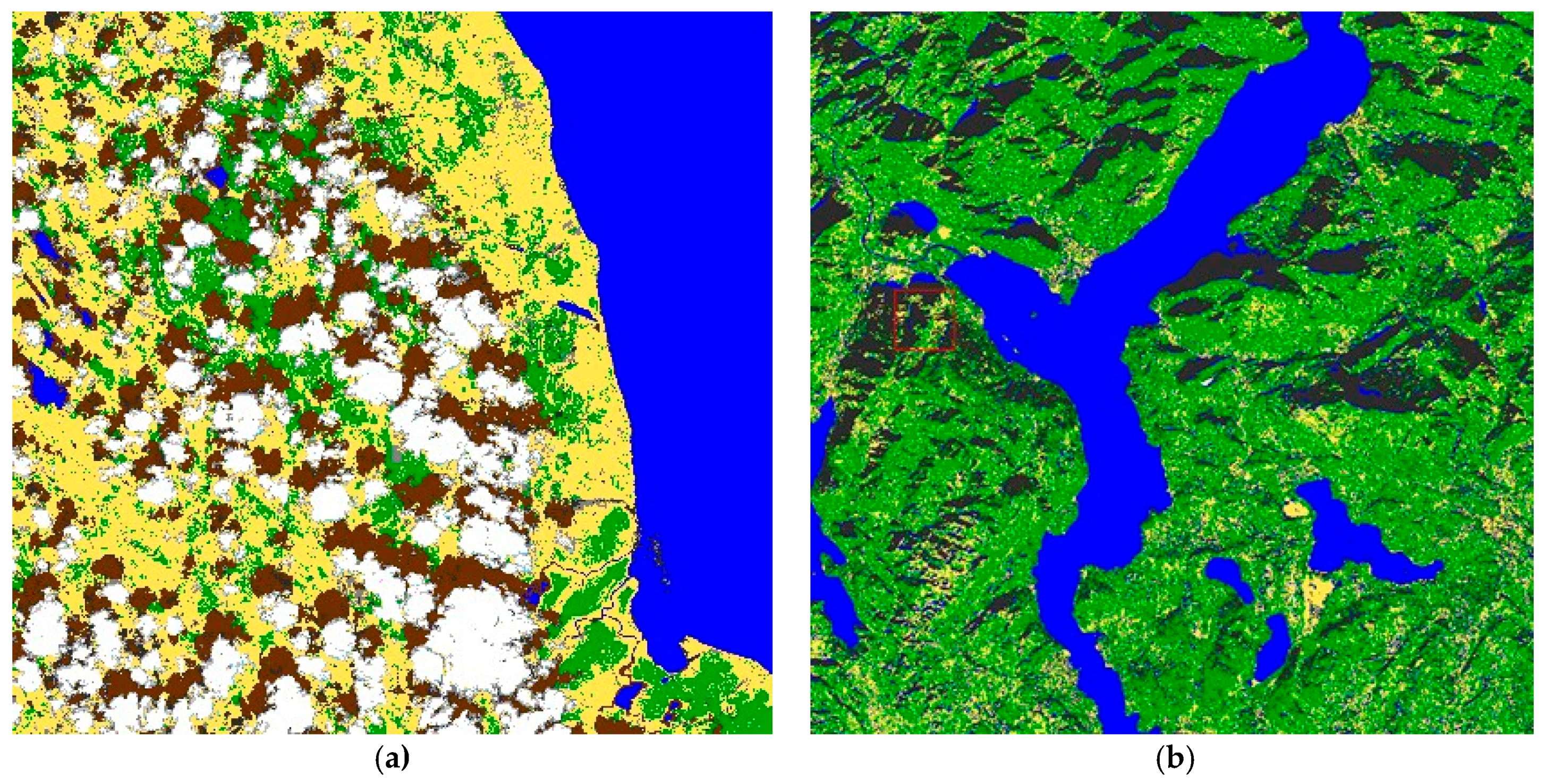
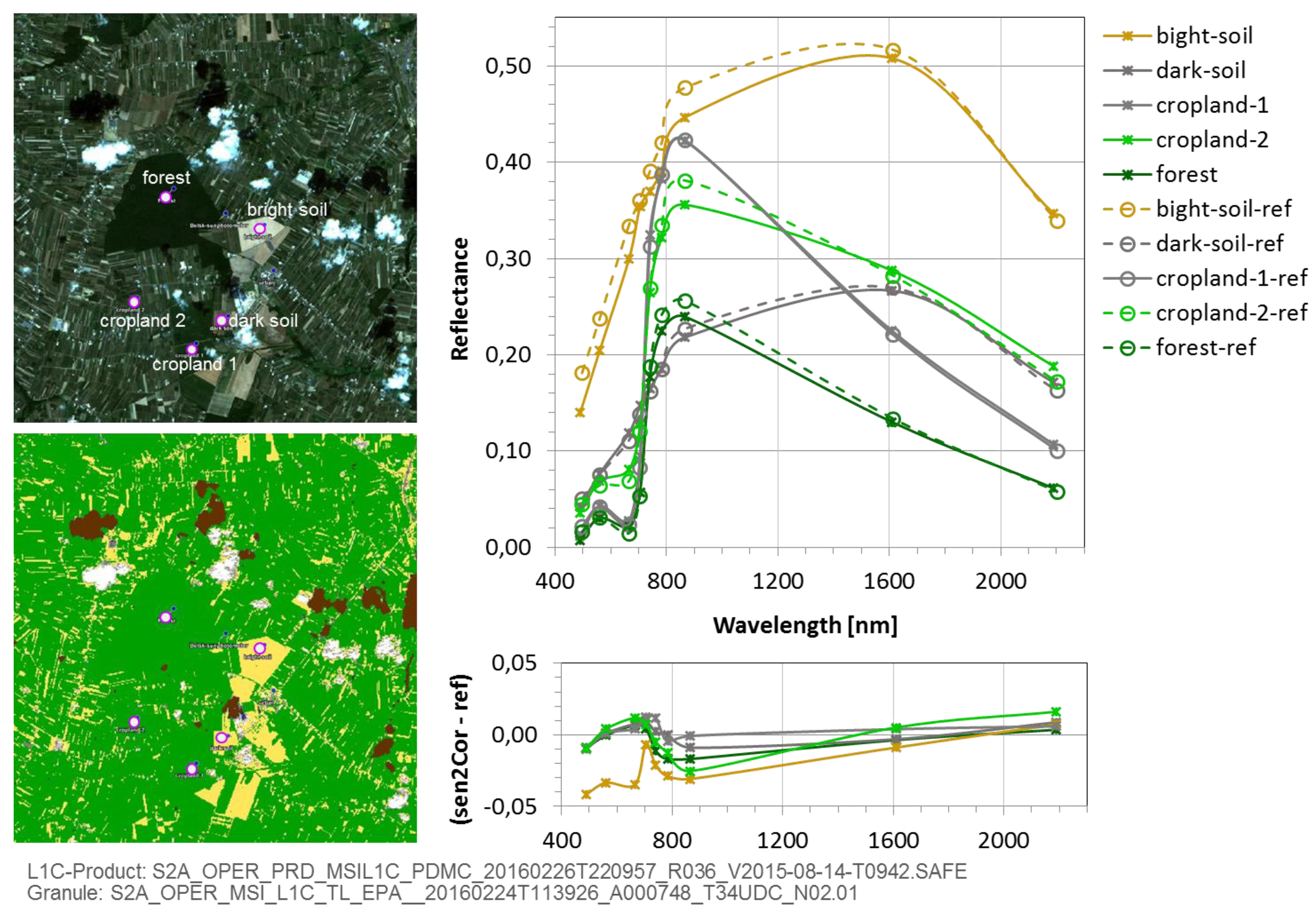
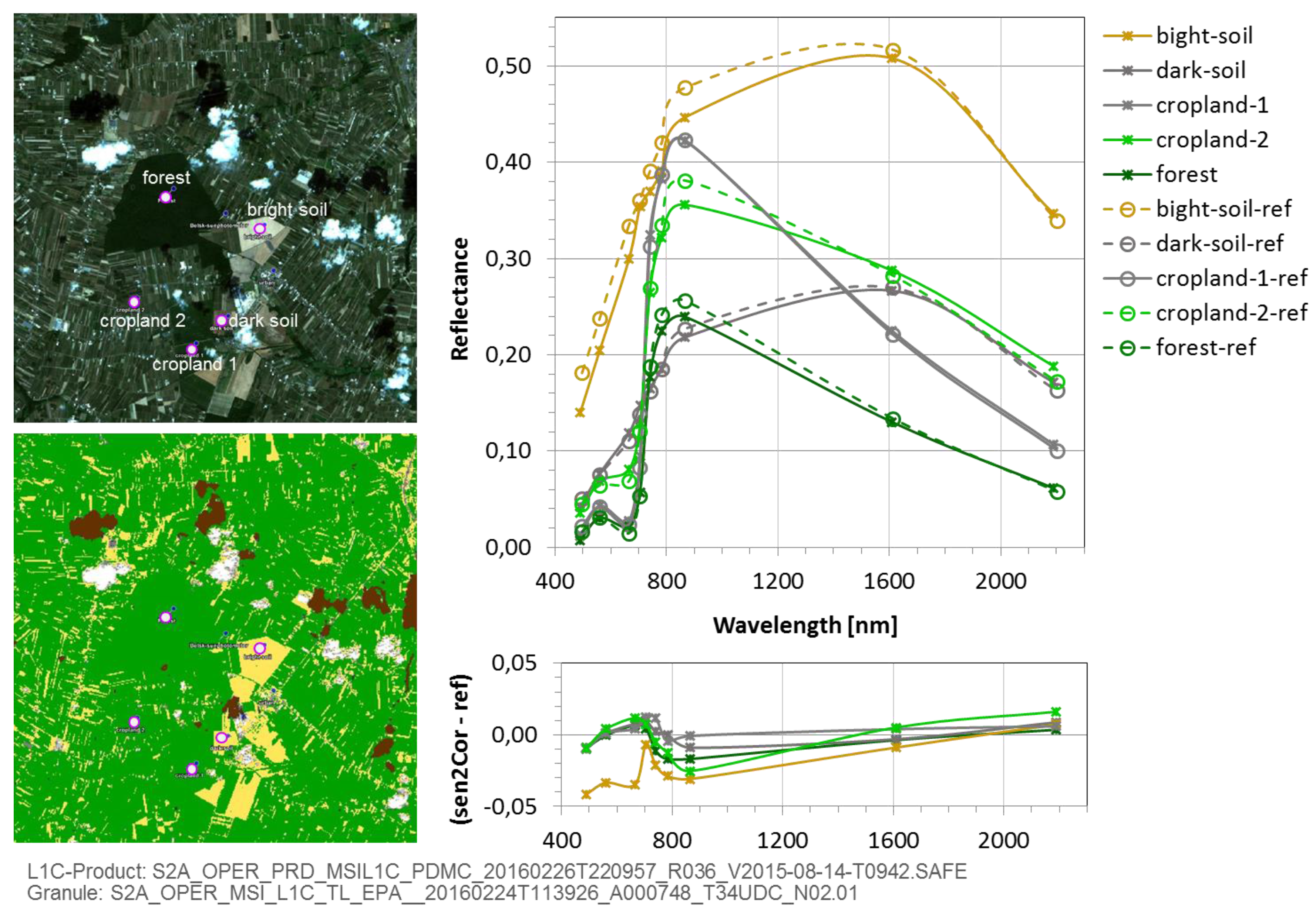
Figure 64.
Validation example for Bottom-Of-Atmosphere (BOA) reflectance, Site Belsk (Poland), acquired on 14th of August 2015, characterized by flat terrain. (Left): BOA-RGB and scene classification image of the 9 × 9 km2 area around AERONET sunphotometer (longitude 20.79 E, latitude 51.84 N). (Right): Example spectra and relative difference to reference for soil and vegetated pixels at indicated locations.
Figure 64.
Validation example for Bottom-Of-Atmosphere (BOA) reflectance, Site Belsk (Poland), acquired on 14th of August 2015, characterized by flat terrain. (Left): BOA-RGB and scene classification image of the 9 × 9 km2 area around AERONET sunphotometer (longitude 20.79 E, latitude 51.84 N). (Right): Example spectra and relative difference to reference for soil and vegetated pixels at indicated locations.
Table 1.
Detector Configuration.
Table 1.
Detector Configuration.
| Band | Resolution (m) | Integration Time (ms) | Number of Detector Lines | Number of Lines after Selection | Number of Pixels per Detector | X-Size (across-track) (µm) | Y-Size (along-track) (µm) |
|---|
| B01 | 60 | 9.396 | 1 | 1 | 1296 | 15 | 45 |
| B02 | 10 | 1.566 | 1 | 1 | 2592 | 7.5 | 7.5 |
| B03 | 10 | 1.566 | 2 | 2 | 2592 | 7.5 | 7.5 |
| B04 | 10 | 1.566 | 2 | 2 | 2592 | 7.5 | 7.5 |
| B05 | 20 | 3.132 | 1 | 1 | 1296 | 15 | 15 |
| B06 | 20 | 3.132 | 1 | 1 | 1296 | 15 | 15 |
| B07 | 20 | 3.132 | 1 | 1 | 1296 | 15 | 15 |
| B08 | 10 | 1.566 | 1 | 1 | 2592 | 7.5 | 7.5 |
| B8A | 20 | 3.132 | 1 | 1 | 1296 | 15 | 15 |
| B09 | 60 | 9.396 | 1 | 1 | 1296 | 15 | 45 |
| B10 | 60 | 9.396 | 3 | 1 | 1296 | 15 | 15 |
| B11 | 20 | 3.132 | 4 | 2 | 1296 | 15 | 15 |
| B12 | 20 | 3.132 | 4 | 2 | 1296 | 15 | 15 |
Table 2.
Nominal Compression Ratios.
Table 2.
Nominal Compression Ratios.
| | B1 | B2 | B3 | B4 | B5 | B6 | B7 | B8 | B8a | B9 | B10 | B11 | B12 |
|---|
| Comp. ratio | 2.4 | 3.33 | 3.19 | 3 | 3.13 | 3.13 | 2.86 | 3 | 3.13 | 2.14 | 2.65 | 2 | 2.4 |
| Bits per pixel | 5 | 3.6 | 3.76 | 4 | 3.84 | 3.84 | 4.2 | 4 | 3.84 | 5.6 | 4.52 | 6 | 5 |
Table 3.
On the left, statistics on dark signal variations between the dark estimate on June 8, 2016 and the operational dark coefficients deduced from an acquisition on May 9, 2016 (i.e., difference of the mean dark signal measured for the two acquisitions). On the right, statistics on the dark noise for estimate on June 8, 2016 (standard deviation of the dark signal measured by pixel). Measurements are expressed in digital counts (LSB).
Table 3.
On the left, statistics on dark signal variations between the dark estimate on June 8, 2016 and the operational dark coefficients deduced from an acquisition on May 9, 2016 (i.e., difference of the mean dark signal measured for the two acquisitions). On the right, statistics on the dark noise for estimate on June 8, 2016 (standard deviation of the dark signal measured by pixel). Measurements are expressed in digital counts (LSB).
| Dark Signal Variation Relative to the Operational GIPPs on 9 May 2016 | | Dark Noise (RMS in LSB) |
|---|
| 08/06/2016 | Min | Mean | Max | Std | | 08/06/2016 | Min | Mean | Max | Std |
| B01 | −0.1 | 0.0 | 0.1 | 0.02 | | B01 | 0.33 | 0.51 | 0.78 | 0.05 |
| B02 | −0.1 | 0.0 | 0.1 | 0.02 | | B02 | 0.37 | 0.51 | 2.41 | 0.06 |
| B03 | −0.1 | 0.0 | 0.2 | 0.02 | | B03 | 0.21 | 0.42 | 0.75 | 0.08 |
| B04 | −0.1 | 0.0 | 0.3 | 0.02 | | B04 | 0.22 | 0.43 | 0.66 | 0.08 |
| B05 | −0.1 | 0.0 | 0.2 | 0.02 | | B05 | 0.37 | 0.53 | 0.75 | 0.05 |
| B06 | −0.2 | 0.0 | 0.2 | 0.02 | | B06 | 0.36 | 0.52 | 0.77 | 0.05 |
| B07 | −0.1 | 0.0 | 0.2 | 0.03 | | B07 | 0.35 | 0.53 | 0.83 | 0.05 |
| B08 | −0.1 | 0.0 | 0.3 | 0.02 | | B08 | 0.36 | 0.52 | 0.86 | 0.05 |
| B8A | −0.1 | 0.0 | 0.6 | 0.03 | | B8A | 0.29 | 0.53 | 0.77 | 0.05 |
| B09 | −0.2 | 0.0 | 0.7 | 0.03 | | B09 | 0.29 | 0.50 | 0.75 | 0.06 |
| B10 | −1.0 | 0.0 | 1.1 | 0.12 | | B10 | 0.91 | 1.06 | 1.37 | 0.03 |
| B11 | −0.9 | 0.0 | 0.5 | 0.08 | | B11 | 0.54 | 0.67 | 0.82 | 0.03 |
| B12 | −5.0 | 0.0 | 5.5 | 0.34 | | B12 | 0.55 | 0.73 | 2.02 | 0.05 |
Table 4.
Statistics on the Ra factor for relative gains variation between the sun-diffuser acquisition on 08 June 2016 and the previous update of GIPPs from the acquisition on 09 May 2016, without cross-talk correction. Minimal, mean and maximal values of Ra and its standard deviation over all pixels are given for each spectral band.
Table 4.
Statistics on the Ra factor for relative gains variation between the sun-diffuser acquisition on 08 June 2016 and the previous update of GIPPs from the acquisition on 09 May 2016, without cross-talk correction. Minimal, mean and maximal values of Ra and its standard deviation over all pixels are given for each spectral band.
| 2016-06-08 | Min | Mean | Max | STD |
|---|
| B01 | 0.999 | 1.000 | 1.001 | 0.0004 |
| B02 | 0.999 | 1.000 | 1.001 | 0.0003 |
| B03 | 0.999 | 1.000 | 1.001 | 0.0004 |
| B04 | 0.999 | 1.000 | 1.001 | 0.0004 |
| B05 | 0.999 | 1.000 | 1.002 | 0.0006 |
| B06 | 0.999 | 1.000 | 1.001 | 0.0004 |
| B07 | 0.999 | 1.000 | 1.001 | 0.0005 |
| B08 | 0.999 | 1.000 | 1.002 | 0.0005 |
| B8A | 0.999 | 1.000 | 1.002 | 0.0005 |
| B09 | 0.999 | 1.000 | 1.002 | 0.0005 |
| B10 | 0.989 | 1.000 | 1.028 | 0.0014 |
| B11 | 0.992 | 1.000 | 1.027 | 0.0012 |
| B12 | 0.994 | 1.000 | 1.006 | 0.0007 |
Table 5.
Averaged SWIR electrical crosstalk.
Table 5.
Averaged SWIR electrical crosstalk.
| | Measurement on Band (dB) |
|---|
| B10 | B11 | B12 |
|---|
| Illuminated Band | B10 | 0 | −83 | −60 |
| B11 | −47 | 0 | −76 |
| B12 | −54 | −53 | 0 |
Table 6.
Viewing frames alignment biases.
Table 6.
Viewing frames alignment biases.
| Applicability Date | GIPP DATATI | GIPP SPAMOD |
|---|
| Roll | Pitch | Yaw |
|---|
| 03/07/2015 | −2 ms | −81.0 µrad | 953.0 µrad | 0 |
| 01/09/2015 | −2 ms | −77.8 µrad | 949.4 µrad | 22 µrad |
| 15/11/2015 | −2 ms | −77.8 µrad | 946.0 µrad | 47 µrad |
| 01/02/2016 | −2 ms | −78.7 µrad | 952.4 µrad | 62 µrad |
Table 7.
Statistics on the Fixed Pattern Noise (FPN) (in %) estimated on the sun-diffuser acquisition of 04 July 2016 by applying the operational equalisation coefficients calculated from the sun-diffuser acquisition of 08 June 2016. Values are given for the minimal, average and maximal values, and for the quantile at 98 %. The specified maximum acceptable (requirement) values are recalled.
Table 7.
Statistics on the Fixed Pattern Noise (FPN) (in %) estimated on the sun-diffuser acquisition of 04 July 2016 by applying the operational equalisation coefficients calculated from the sun-diffuser acquisition of 08 June 2016. Values are given for the minimal, average and maximal values, and for the quantile at 98 %. The specified maximum acceptable (requirement) values are recalled.
| Band | Req. | Min FPN | Avg FPN | Q. 98% FPN | Max FPN |
|---|
| B01 | 0.2 | 0.00 | 0.01 | 0.02 | 0.03 |
| B02 | 0.2 | 0.01 | 0.01 | 0.02 | 0.02 |
| B03 | 0.2 | 0.00 | 0.01 | 0.01 | 0.03 |
| B04 | 0.2 | 0.01 | 0.01 | 0.01 | 0.03 |
| B05 | 0.2 | 0.01 | 0.01 | 0.02 | 0.04 |
| B06 | 0.2 | 0.01 | 0.01 | 0.01 | 0.04 |
| B07 | 0.2 | 0.01 | 0.01 | 0.02 | 0.05 |
| B08 | 0.2 | 0.01 | 0.01 | 0.02 | 0.03 |
| B8A | 0.2 | 0.01 | 0.01 | 0.02 | 0.03 |
| B09 | 0.3 | 0.01 | 0.01 | 0.02 | 0.06 |
| B10 | 0.3 | 0.00 | 0.11 | 0.24 | 0.95 |
| B11 | 0.2 | 0.03 | 0.07 | 0.17 | 0.35 |
| B12 | 0.2 | 0.00 | 0.03 | 0.07 | 0.10 |
Table 8.
Definition of the absolute radiometry vicarious validation sites used in this analysis.
Table 8.
Definition of the absolute radiometry vicarious validation sites used in this analysis.
| Name | Latitude (°) | Longitude (°) |
|---|
| Min | Max | Min | Max |
|---|
| Atlantic-SW-Optimum | −14.5 | −13.5 | −24.5 | −23.5 |
| Atlantic-NW-Optimum | 22.5 | 23.5 | −67.5 | −66.5 |
| Pacific-NE-Optimum | 17.5 | 18.5 | −152.5 | −151.5 |
| Pacific-NW-Optimum | 17.5 | 18.5 | 156.5 | 157.5 |
| Pacific-Southern-Gyre-Optimum | −26.5 | −25.5 | −121.5 | −119.5 |
| Southern-Indian-Ocean-Optimum | −27.5 | −26.5 | 77.8 | 78.5 |
| Maldives | −10.0 | 10.0 | 60.0 | 90.0 |
| Rail-Road Valley Playa | 38.495 | 38.505 | −115.685 | −115.695 |
Table 9.
Estimation of the relative importance of all contributors to the Top-Of-Atmosphere (TOA) radiance over DCC (average case).
Table 9.
Estimation of the relative importance of all contributors to the Top-Of-Atmosphere (TOA) radiance over DCC (average case).
| Contribution to the Signal, Except Absorption |
|---|
| Band (nm) | Cloud | Molecular Signal | Aerosols | Gaseous Transmission |
|---|
| 443 | 95.7% | 4.3% | 0.0% | 0.1% |
| 490 | 97.2% | 2.8% | 0.0% | 1.2% |
| 560 | 98.4% | 1.6% | 0.0% | 5.6% |
| 665 | 99.2% | 0.8% | 0.0% | 2.4% |
| 775 | 99.5% | 0.5% | 0.0% | 4.9% |
| 865 | 99.7% | 0.3% | 0.0% | 0.0% |
Table 10.
Vicarious calibration coefficients estimated from Rayleigh and ground-based reflectance methodology and the associated uncertainty.
Table 10.
Vicarious calibration coefficients estimated from Rayleigh and ground-based reflectance methodology and the associated uncertainty.
| | | Rayleigh | DCC | In-Situ |
|---|
| S2A/MSI Bands | Wave Length (nm) | Vic. Cal. Coeff. | Uncert. (%) | Vic. Cal. Coeff. | Std. Dev. (%) | Vic. Cal. Coeff. | Uncert. (%) |
|---|
| B01 | 443 | 1.028 | 1.8 | 1.000 | 1 | 1.048 | 6 |
| B02 | 490 | 1.024 | 1.8 | 0.990 | 1 | 1.028 | 5 |
| B03 | 560 | 1.023 | 1.8 | 0.980 | <1 | 1.020 | 3 |
| B04 | 665 | 1.021 | 1.8 | -- | -- | 1.046 | 3 |
| B05 | 705 | NA | NA | 1.000 | 1 | 1.034 | 3 |
| B06 | 740 | NA | NA | 1.010 | 1 | 1.023 | 3 |
| B07 | 783 | NA | NA | 1.010 | 1 | 1.029 | 3 |
| B08 | 842 | NA | NA | 1.020 | 2 | 1.011 | 3 |
| B8A | 865 | NA | NA | 1.030 | 1 | 1.031 | 3 |
| B09 | 945 | NA | NA | NA | NA | 0.994 | 3 |
| B10 | 1375 | NA | NA | NA | NA | NA | 3 |
| B11 | 1610 | NA | NA | NA | NA | 1.053 | 3 |
| B12 | 2190 | NA | NA | NA | NA | 1.091 | 3 |
Table 11.
Definition of the desert sites used for this analysis.
Table 11.
Definition of the desert sites used for this analysis.
| N° | Name | Latitude (°) | Longitude (°) |
|---|
| Min | Max | Min | Max |
|---|
| 003b | Algeria 3 | 29.82 | 30.82 | 7.16 | 8.16 |
| 005b | Algeria 5 | 30.52 | 31.52 | 1.73 | 2.73 |
| 031b | Libya 1 | 23.92 | 24.92 | 12.85 | 13.85 |
| 034b | Libya 4 | 28.05 | 29.05 | 22.89 | 23.89 |
| 038b | Mauritania 1 | −9.8 | −8.8 | 18.8 | 19.9 |
| 039b | Mauritania 2 | −9.28 | −8.28 | 20.35 | 21.35 |
| 031a | Railroad Valley Playa | 38.495 | 38.505 | −115.685 | −115.695 |
Table 12.
Statistics on geolocation for non-refined L1B and L1C products.
Table 12.
Statistics on geolocation for non-refined L1B and L1C products.
| System Geolocation Performance (Circular Error) | L1B Non Refined | L1C Non Refined |
|---|
| 95.45% conf. level | 10 m | 10 m |
| Mean value | 5 m | 5 m |
| Requirement (for non-refined products) | 20 m | 20 m |
Table 13.
Statistics on geolocation for refined L1C products.
Table 13.
Statistics on geolocation for refined L1C products.
| System Geolocation Performance (Circular Error) | L1C Refined Product |
|---|
| 95.45% conf. level | 8 m |
| Mean value | 4.5 m |
| Max value | 11 m |
Table 14.
Multi-temporal registration performance for non-refined L1C products.
Table 14.
Multi-temporal registration performance for non-refined L1C products.
| Multi-Temporal Registration Performance (PB 2.04) (Circular Error) | Non-Refined L1C Results |
|---|
| 95.45% conf. level | 1 pixel at 10 m |
| Mean value | 0.36 pixel at 10 m |
| Max value | 1.5 pixel at 10 m |
Table 15.
Example of confusion matrix for classification validation. The classes are numbered like in
Figure 60. Note that classes 2 and 3 are merged.
Table 15.
Example of confusion matrix for classification validation. The classes are numbered like in
Figure 60. Note that classes 2 and 3 are merged.
| Sen2Cor Class | Ground-Truth Class | UA (%) |
|---|
| (1) | (2+3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) | (11) |
|---|
| (1) | Saturated or defective | 0 | 0 | 0 | 5 | 0 | 0 | 0 | 9 | 7 | 16 | 0 |
| (2+3) | Dark area, cloud shadows | 0 | 6785 | 880 | 0 | 0 | 5 | 0 | 0 | 0 | 0 | 88.5 |
| (4) | Vegetation | 0 | 31 | 15,398 | 52 | 0 | 46 | 0 | 0 | 198 | 0 | 97.9 |
| (5) | Not-vegetated | 0 | 441 | 406 | 38,063 | 0 | 177 | 34 | 460 | 0 | 0 | 96.2 |
| (6) | Water | 0 | 3223 | 3 | 0 | 42,351 | 110 | 0 | 0 | 89 | 0 | 92.5 |
| (7) | Unclassified | 0 | 1 | 154 | 354 | 0 | 205 | 163 | 212 | 33 | 0 | 18.3 |
| (8) | Cloud medium probability | 0 | 21 | 75 | 599 | 0 | 517 | 823 | 347 | 327 | 0 | 30.4 |
| (9) | Cloud high probability | 0 | 0 | 0 | 24 | 0 | 14 | 533 | 4197 | 148 | 0 | 85.4 |
| (10) | Thin cirrus | 0 | 3234 | 6444 | 2205 | 0 | 934 | 7010 | 187 | 48,308 | 0 | 70.7 |
| (11) | Snow | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Producer Accuracy (%) | 0 | 49.4 | 65.9 | 92.2 | 100.0 | 10.2 | 9.6 | 77.5 | 98.4 | 0 | |


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}