
Underwater Topography Detection in Coastal Areas Using Fully Polarimetric SAR Data


Abstract
:
1. Introduction
2. Materials and Methods
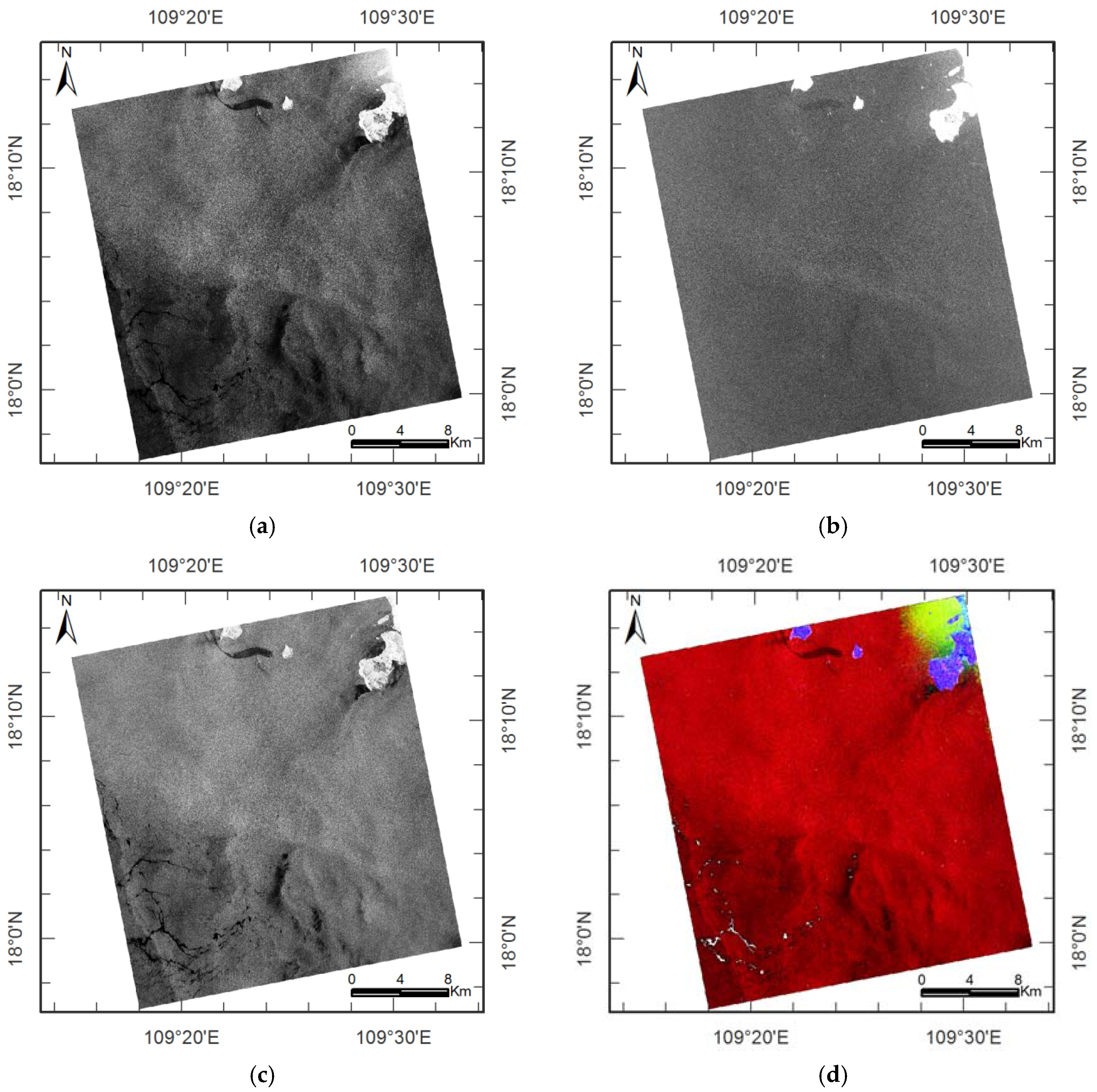
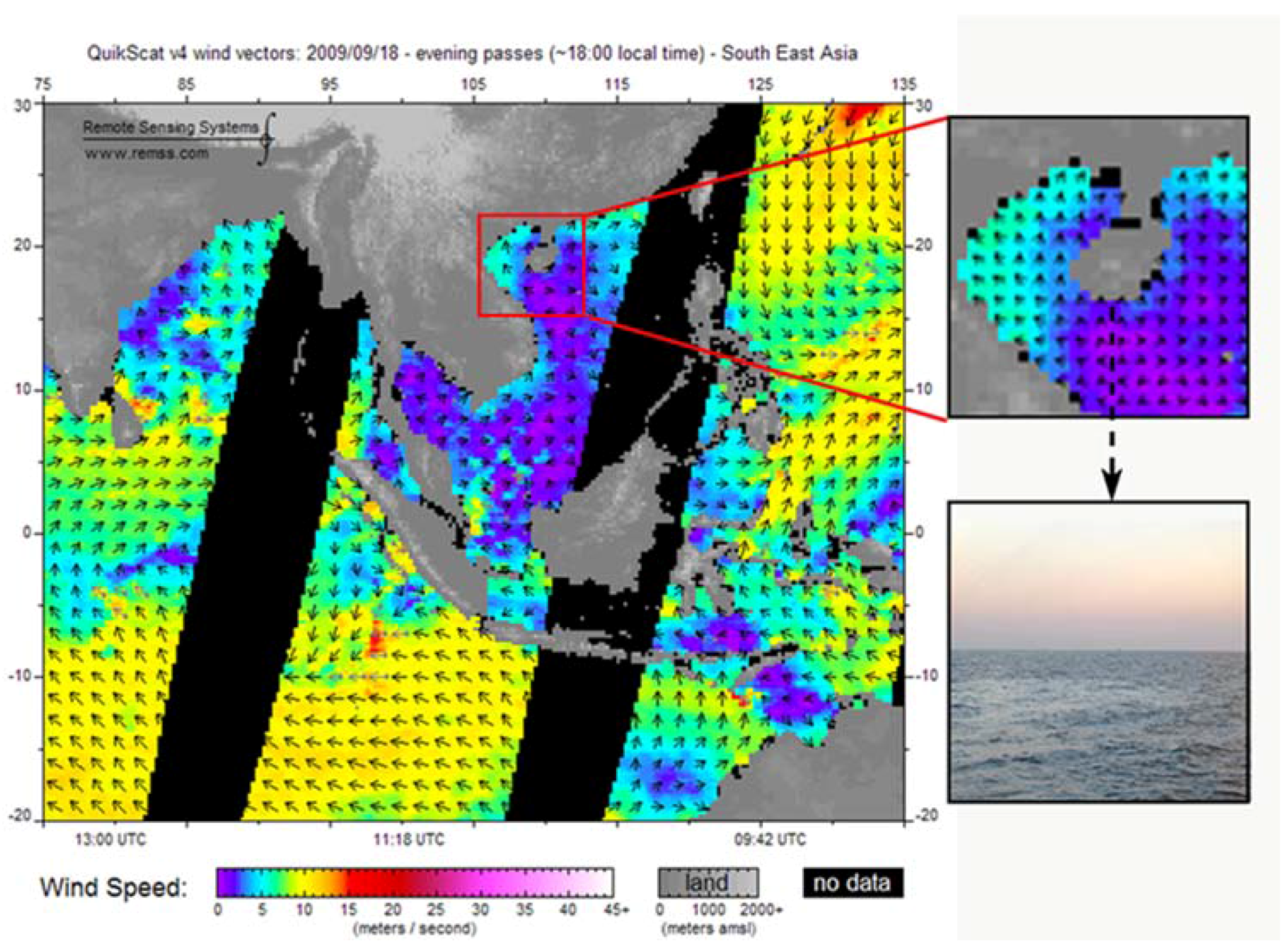
2.1. SAR Data and Auxiliary Data
2.2. Methods
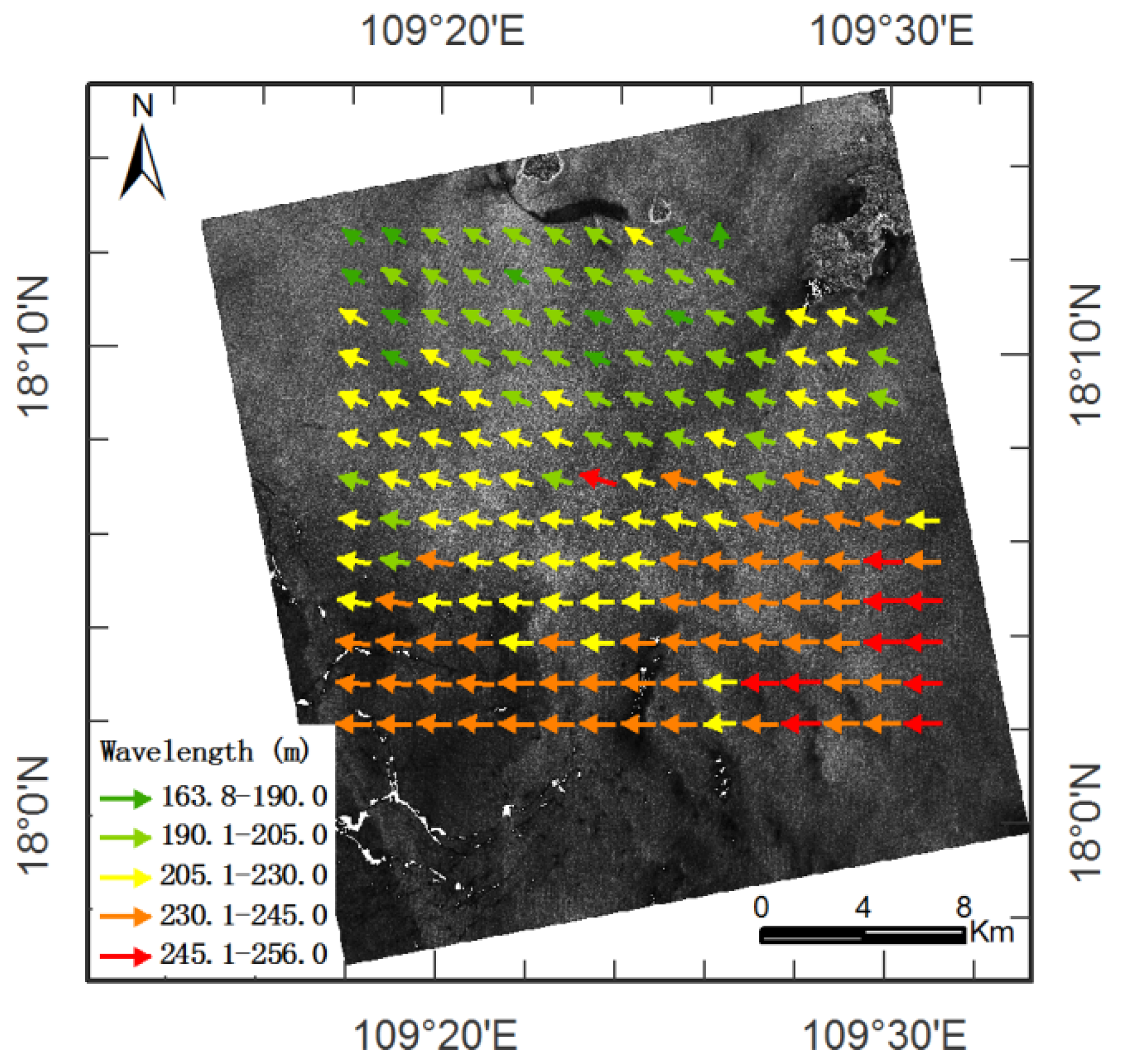
2.2.1. SAR Imaging of Waves
2.2.2. Freeman-Durden Decomposition
2.2.3. Wave Shoaling and Refraction
2.2.4. Linear Dispersion Relationship
2.2.5. Description of the Algorithm for Underwater Topography Detection
3. Results
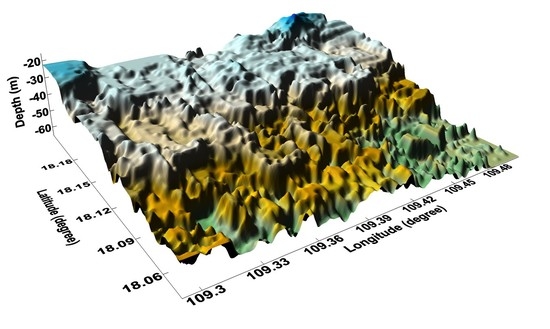
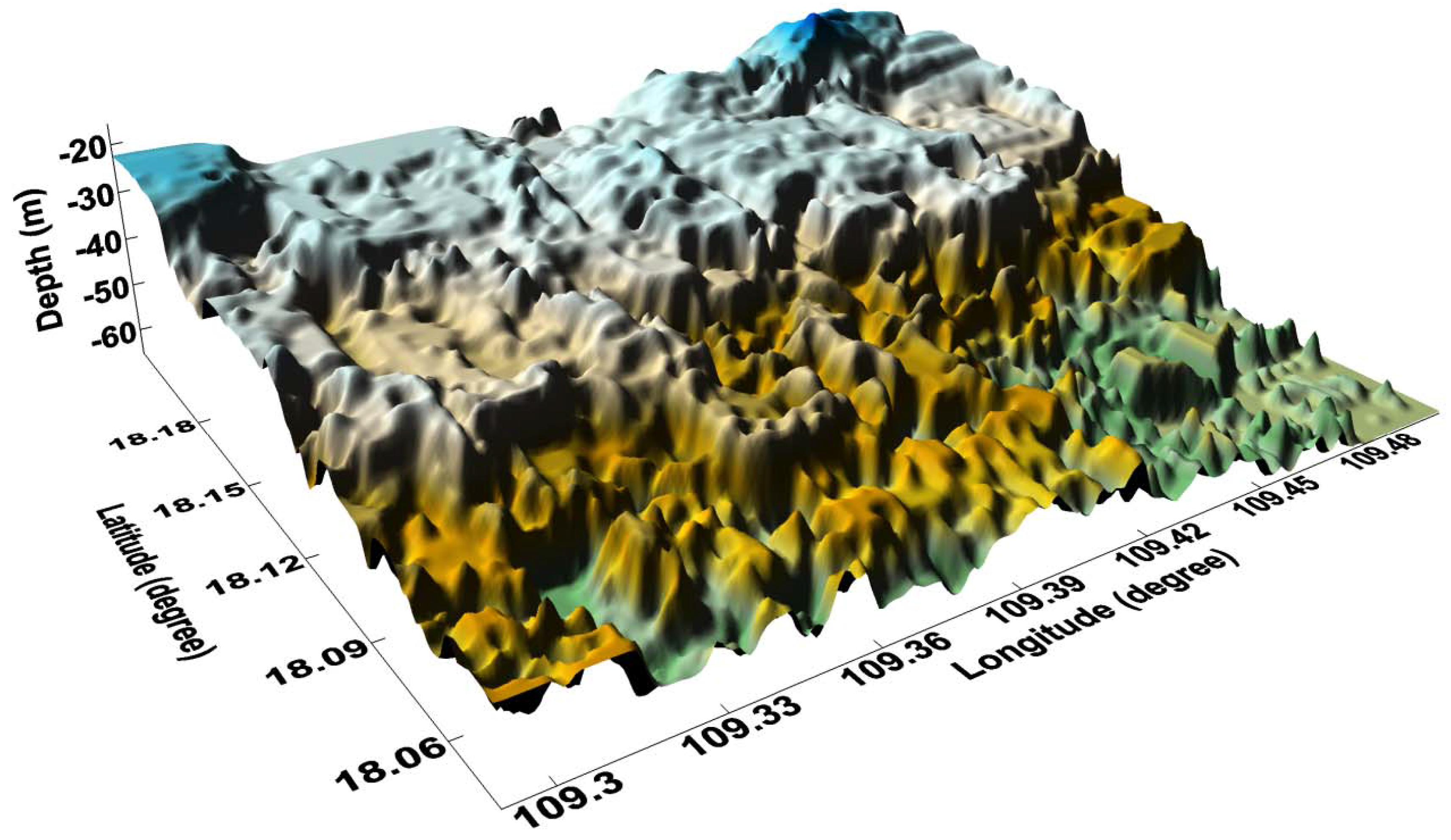
3.1. Underwater Topography Results
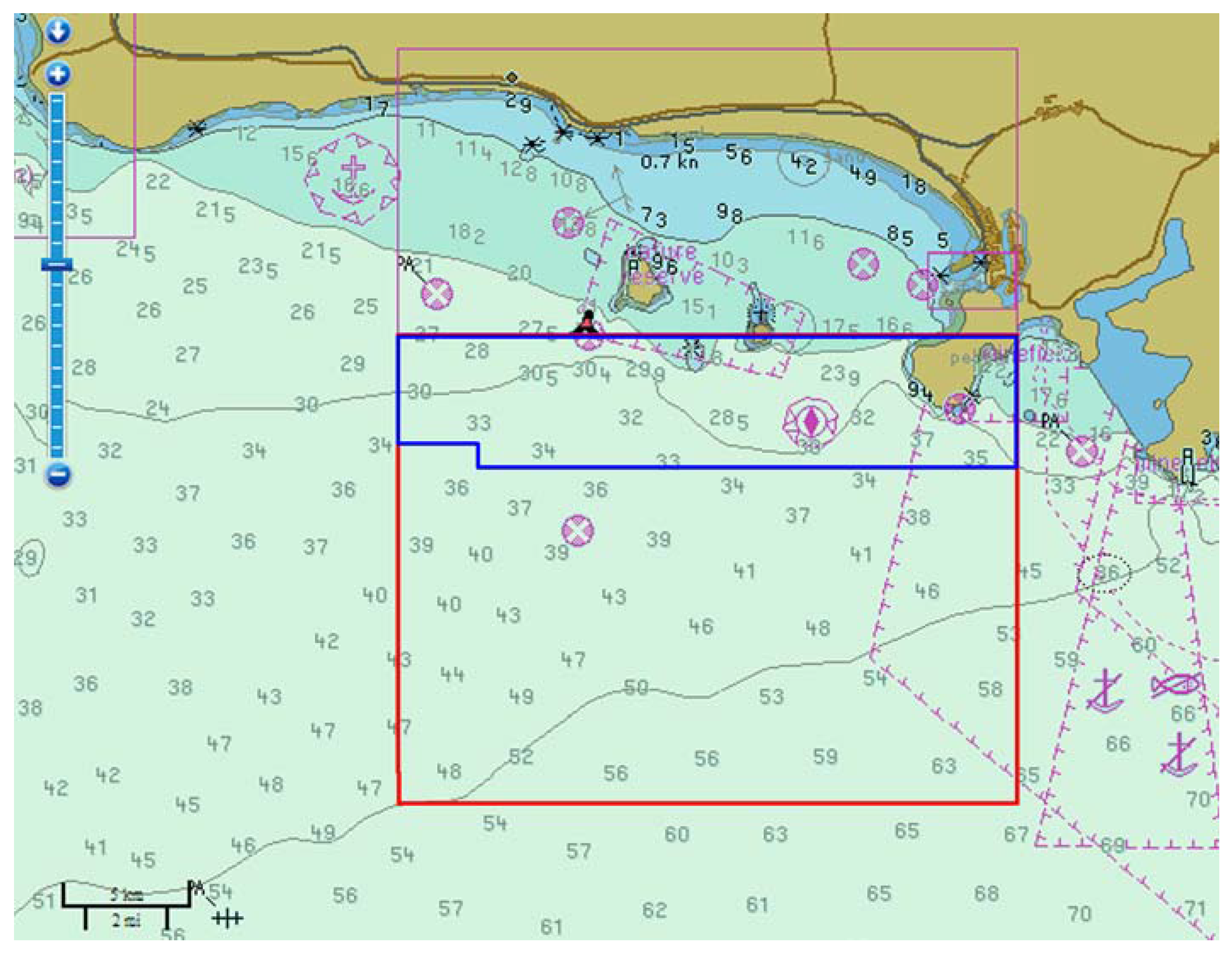
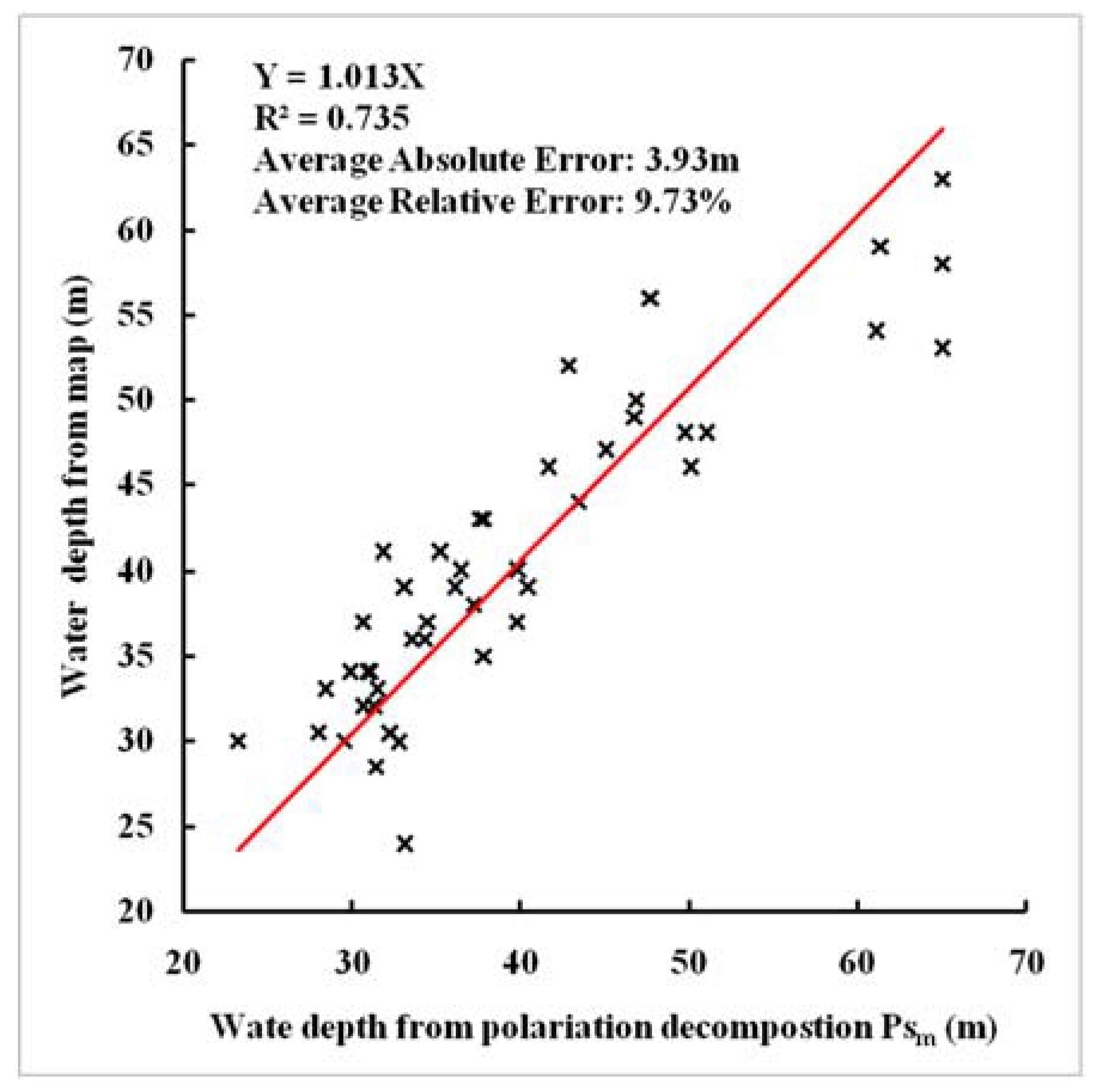
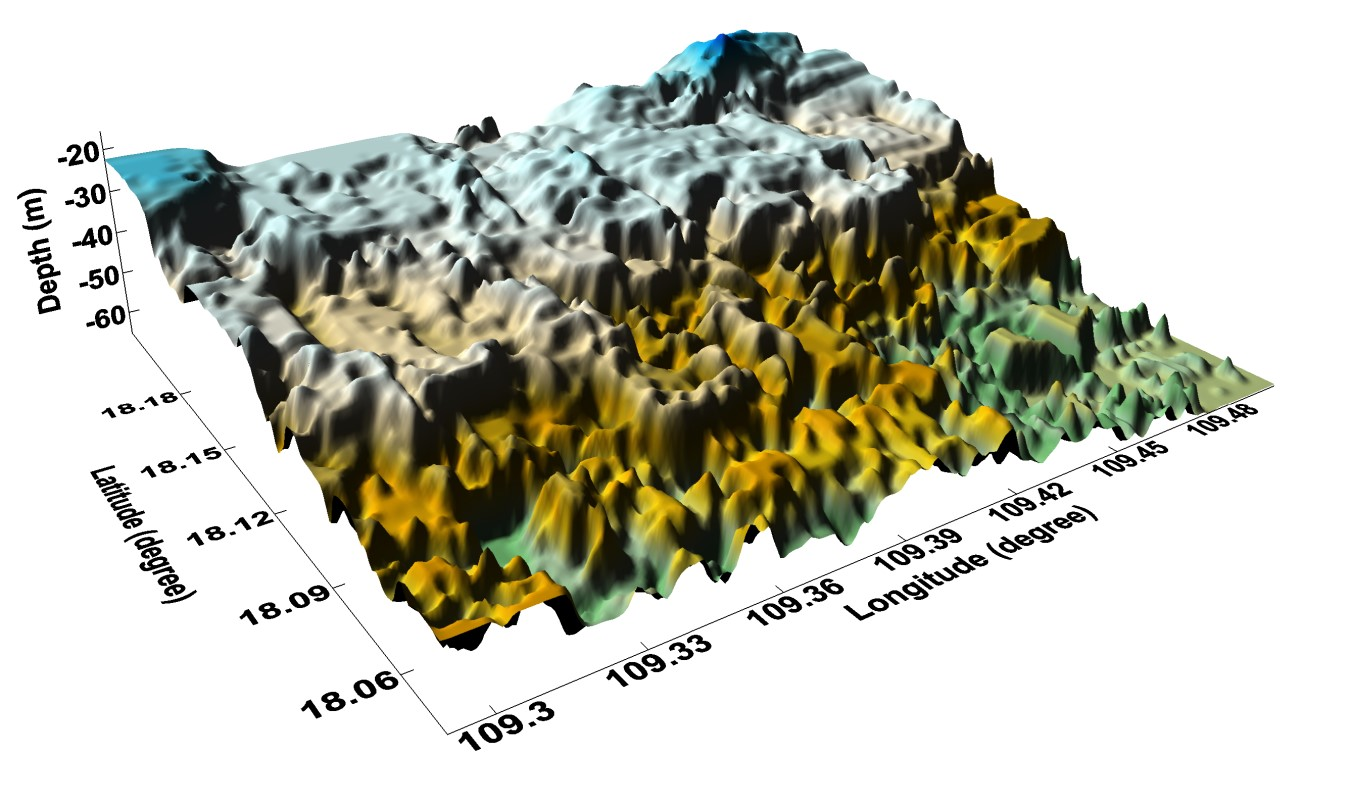
3.2. Comparing with ENC
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jackson, C.R.; Apel, J.R. Synthetic Aperture Radar Marine User's Manual; NOAA: Washington, DC, USA, 2004. [Google Scholar]
- Holland, T.K. Application of the linear dispersion relation with respect to depth inversion and remotely sensed imagery. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2319. [Google Scholar] [CrossRef]
- Calkoen, C.J.; Hesselmans, G.H.F.M.; Wensink, G.J.; Vogelzang, J. The bathymetry assessment system: Efficient depth mapping in shallow seas using radar images. Int. J. Remote Sens. 2001, 22, 2973–2998. [Google Scholar] [CrossRef]
- Brusch, S.; Held, P.; Lehner, S.; Rosenthal, W.; Pleskachevsky, A. Underwater bottom topography in coastal areas from TerraSAR-X data. Int. J. Remote Sens. 2011, 32, 4527–4543. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: London, UK, 2009. [Google Scholar]
- Schuler, D.L.; Lee, J.S.; Kasilingam, D.; Pottier, E. Measurement of ocean surface slopes and wave spectra using polarimetric SAR image data. Remote Sens. Environ. 2004, 91, 198–211. [Google Scholar] [CrossRef]
- Bian, X.; Shao, Y.; Tian, W.; Zhang, C. Estimation of shallow water depth using HJ-1C S-band SAR data. J. Navig. 2016, 69, 113–126. [Google Scholar] [CrossRef]
- Fan, K.; Huang, W.; Lin, H.; Pan, J.; Fu, B.; Gu, Y. Shallow water depth retrieval from space-borne SAR imagery. J. Oceanogr. 2011, 67, 405–413. [Google Scholar] [CrossRef]
- Fan, K.; Huang, W.; He, M.; Fu, B.; Zhang, B.; Chen, X. Depth inversion in coastal water based on SAR image of waves. Chin. J. Oceanol. Limn. 2008, 26, 434–439. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, J.; Meng, J. Underwater topography detection of Taiwan Shoal with SAR images. Chin. J. Oceanol. Limn. 2010, 28, 636–642. [Google Scholar] [CrossRef]
- Li, X.; Yang, X.; Zheng, Q.; Pietrafesa, L.J.; Pichel, W.G.; Li, Z.; Li, X. Deep-water bathymetric features imaged by spaceborne SAR in the Gulf Stream region. Geophys. Res. Lett. 2010, 37, 96–104. [Google Scholar] [CrossRef]
- Pleskachevsky, A.; Lehner, S.; Heege, T.; Mott, C. Synergy and fusion of optical and synthetic aperture radar satellite data for underwater topography estimation in coastal areas. Ocean Dynam. 2011, 61, 2099–2120. [Google Scholar] [CrossRef]
- Wackerman, C.; Lyzenga, D.; Ericson, E.; Walker, D. Estimating Near-Shore Bathymetry Using SAR. In Proceedings of the 1998 IEEE International Geoscience and Remote Sensing Symposium, Seattle, WA, USA, 6–10 July 1998; pp. 1668–1670. [Google Scholar]
- Alpers, W.; Ingo, H. A theory of the imaging mechanism of underwater bottom topography by real and synthetic aperture radar. J. Geophys. Res. Oceans 1984, 89, 10529–10546. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, J.; Meng, J. A detection model of underwater topography with a series of SAR images acquired at different time. Acta Oceanol. Sin. 2010, 29, 28–37. [Google Scholar] [CrossRef]
- Li, X.; Li, C.; Xu, Q.; Pichel, W.G. Sea surface manifestation of along-tidal-channel underwater ridges imaged by SAR. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2467–2477. [Google Scholar]
- Bi, X.; Meng, J.; Yang, J.; Liu, Q. Application of SAR polarization information for detection of underwater topography. J. Remot. Sens. 2013, 17, 34–45. (In Chinese) [Google Scholar]
- Monteiro, F. Advanced Bathymetry Retrieval from Swell Patterns in High-Resolution SAR Images. Master Thesis, University of Miami, Coral Gables, FL, USA, December 2013. [Google Scholar]
- Mishra, M.K.; Ganguly, D.; Chauhan, P.; Ajai. Estimation of coastal bathymetry using RESAT-1 C-band microwave SAR data. IEEE Geosci. Remote Sens. Lett. 2014, 11, 671–675. [Google Scholar] [CrossRef]
- Li, X.; Lehner, S.; Rosenthal, W. Investigation of ocean surface wave refraction using TerraSAR-X data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 830–840. [Google Scholar]
- Boccia, V. Linear dispersion relation and depth sensitivity to swell parameters: Application to synthetic aperture radar imaging and bathymetry. Sci. World J. 2015, 2015, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Boccia, V.; Renga, A.; Moccia, A.; Zoffoli, S. Tracking of coastal swell fields in SAR images for sea depth retrieval: Application ALOS L-band data. IEEE J. Sele. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3532–3540. [Google Scholar] [CrossRef]
- Hasselmann, K.; Raney, R.K.; Plant, W.J.; Alpers, W.; Shuchman, R.A.; Lyzenga, D.R.; Rufenach, C.L.; Tucker, M.J. Theory of synthetic aperture radar ocean imaging: A MARSEN view. J. Geophys. Res. Atmos. 1985, 90, 4659–4686. [Google Scholar] [CrossRef]
- Valenzuela, G.R. Theories for the interaction of electromagnetic and oceanic waves—A review. Bound. Lay. Meteorol. 1978, 13, 61–85. [Google Scholar] [CrossRef]
- Romeiser, R.; Alpers, W. An improved composite surface model for the radar backscattering cross section of the ocean surface: 2. Model response to surface roughness variations and the radar imaging of underwater bottom topography. J. Geophys. Res. Atmos. 1997, 102, 25251–25267. [Google Scholar] [CrossRef]
- Ouchi, K. A theory on the distribution function of backscatter radar cross section from ocean waves of individual wavelength. IEEE Trans. Geosci. Remote Sens. 2000, 38, 811–822. [Google Scholar] [CrossRef]
- Alpers, W.; Ross, D.B.; Rufenach, C.L. On the detectability of ocean surface waves by real and synthetic aperture radar. J. Geophys. Res. Atmos. 1981, 86, 6481–6498. [Google Scholar] [CrossRef]
- Zheng, Q.; Li, L.; Guo, X.; Yong, G.; Zhu, D.; Li, C. SAR imaging and hydrodynamic analysis of ocean bottom topographic waves. J.Geophys. Res. Oceans 2006, 111. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Kirbya, J.T.; Dalrympleb, R.A. An approximate model for nonlinear dispersion in monochromatic wave propagation models. Coast. Eng. 1986, 9, 545–561. [Google Scholar] [CrossRef]
- Collard, F.; Ardhuin, F.; Chapron, B. Extraction of coastal ocean wave fields from SAR images. IEEE J. Oceanic Eng. 2005, 30, 526–533. [Google Scholar] [CrossRef]
- Tian, W.; Shao, Y.; Yuan, J.; Wang, S. An experiment for oil spill recognition using RADARSAT-2 image. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HA, USA, 25–30 July 2010; pp. 2761–2764. [Google Scholar]
- Vachon, P.W.; Wolfe, J. C-band cross-polarization wind speed retrieval. IEEE Geosci. Remote Sens. Lett. 2011, 8, 456–459. [Google Scholar] [CrossRef]
- Zhang, B.; Li, X.; Perrie, W.; He, Y. Synergistic measurements of ocean winds and waves from SAR. J. Geophys. Res. Oceans 2015, 120, 6164–6184. [Google Scholar] [CrossRef]
- Shao, W.; Zhang, Z.; Li, X.; Li, H. Ocean wave parameters retrieval from Sentinel-1 SAR imagery. Remote Sens. 2016, 8. [Google Scholar] [CrossRef]
- Zhang, B.; Perrie, W.; Vachon, P.W.; Li, X.; Pichel, W.G.; Guo, J.; He, Y. Ocean vector winds retrieval from c-band fully polarimetric SAR measurements. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4252–4261. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Sato, A.; Boerner, W.M.; Sato, R.; Yamada, H. Four-component scattering power decomposition with rotation of coherency matrix. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2251–2258. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Satellite Height | Slant Range Near Edge | Incidence Angle Near Range | Incidence Angle Far Range |
|---|---|---|---|---|
| Value | 793.93 km | 919.8 km | 32.353 deg | 34.013 deg |
| Input Data | VV | VVsm | HH | HHsm |
|---|---|---|---|---|
| Low scale average absolute error | 4.37 m | 4.22 m | 5.03 m | 4.30 m |
| Low scale average relative error | 11.30% | 10.30% | 12.42% | 10.92% |
| Local high scale average absolute error | 3.41 m | 3.43 m | 3.95 m | 3.55 m |
| Local high scale average relative error | 11.43% | 11.53% | 13.32% | 12.63% |
| Input Data | VV12.5 | VV10 | VV8 | VV5 |
|---|---|---|---|---|
| Low scale average absolute error | 5.43 m | 4.37 m | 4.54 m | 4.37 m |
| Low scale average relative error | 14.17% | 11.29% | 12.20% | 11.30% |
| Local high scale average absolute error | 3.79 m | 3.24 m | 3.43 m | 3.41 m |
| Local high scale average relative error | 12.32% | 10.99% | 11.65% | 11.43% |
| Input Data | VV256 | VV512 | VV1024 |
|---|---|---|---|
| Low scale average absolute error | 18.2 m | 9.80 m | 4.37 m |
| Low scale average relative error | 46.33% | 26.18% | 11.30% |
| Local high scale average absolute error | 17.80 m | 9.26 m | 3.41 m |
| Local high scale average relative error | 59.18% | 31.36% | 11.43% |
| Input Data | HH | VV | Ps | VVm | Psm | Ysm |
|---|---|---|---|---|---|---|
| Low scale average absolute error | 5.03 m | 4.37 m | 4.05 m | 4.45 m | 3.93 m | 3.95 m |
| Low scale average relative error | 12.42% | 11.30% | 9.84% | 11.53% | 9.73% | 9.82% |
| Local high scale average absolute error | 3.95 m | 3.41 m | 3.2 m | 2.98 m | 2.57 m | 2.46 m |
| Local high scale average relative error | 13.32% | 11.43% | 10.8% | 10.6% | 8.76% | 8.42% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bian, X.; Shao, Y.; Tian, W.; Wang, S.; Zhang, C.; Wang, X.; Zhang, Z. Underwater Topography Detection in Coastal Areas Using Fully Polarimetric SAR Data. Remote Sens. 2017, 9, 560. https://doi.org/10.3390/rs9060560
Bian X, Shao Y, Tian W, Wang S, Zhang C, Wang X, Zhang Z. Underwater Topography Detection in Coastal Areas Using Fully Polarimetric SAR Data. Remote Sensing. 2017; 9(6):560. https://doi.org/10.3390/rs9060560
Chicago/Turabian StyleBian, Xiaolin, Yun Shao, Wei Tian, Shiang Wang, Chunyan Zhang, Xiaochen Wang, and Zhixin Zhang. 2017. "Underwater Topography Detection in Coastal Areas Using Fully Polarimetric SAR Data" Remote Sensing 9, no. 6: 560. https://doi.org/10.3390/rs9060560
APA StyleBian, X., Shao, Y., Tian, W., Wang, S., Zhang, C., Wang, X., & Zhang, Z. (2017). Underwater Topography Detection in Coastal Areas Using Fully Polarimetric SAR Data. Remote Sensing, 9(6), 560. https://doi.org/10.3390/rs9060560