Data Assimilation to Extract Soil Moisture Information from SMAP Observations

 ,
, 

Abstract
1. Introduction
2. Datasets
2.1. SMAP Soil Moisture Products
2.1.1. SMAP Neural Network (SMAP NN) Retrieval Product
2.1.2. SMAP Level-2 Passive Retrieval Product (SMAP L2P)
2.1.3. SMAP Level-4 Soil Moisture Analysis (SMAP L4_SM)
2.2. In Situ Data
2.2.1. Core Validation Site Measurements
2.2.2. Sparse Network Measurements
3. Data Assimilation System and Experiments
3.1. Model and Data Assimilation System
3.2. Data Assimilation Experiments
3.2.1. Open Loop
3.2.2. SMAP NN Retrieval Assimilation without Bias Correction (DA-NN)
3.2.3. SMAP NN Retrieval Assimilation with Local CDF-Matching (DA-NN-lCDF)
3.2.4. SMAP L2P Retrieval Assimilation with Global CDF-Matching (DA-L2P-gCDF)
3.2.5. SMAP Level-4 Brightness Temperature Assimilation Product (DA-L4)
3.3. Limitations of the DA Experiments
3.4. Evaluation
3.4.1. Soil Moisture Statistics
3.4.2. Evaluation Against In Situ Measurements
3.4.3. Assimilation Diagnostics
3.4.4. Impact on Related Model Fields
4. Results and Discussion
4.1. Assimilation with Global vs. Local Bias Correction
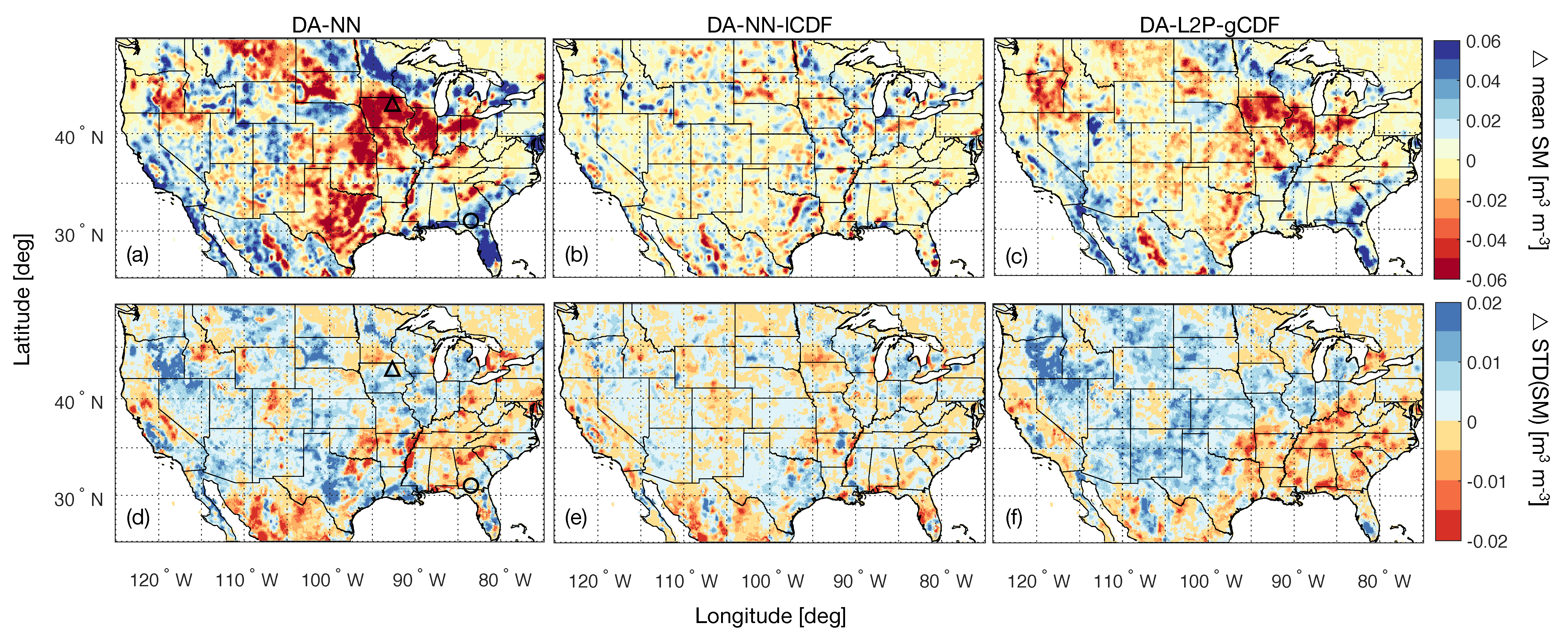
4.1.1. Mean Soil Moisture Statistics
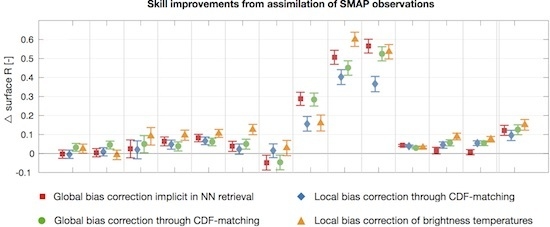
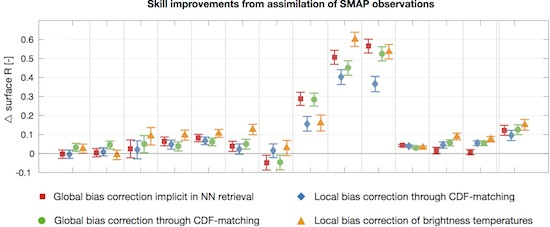
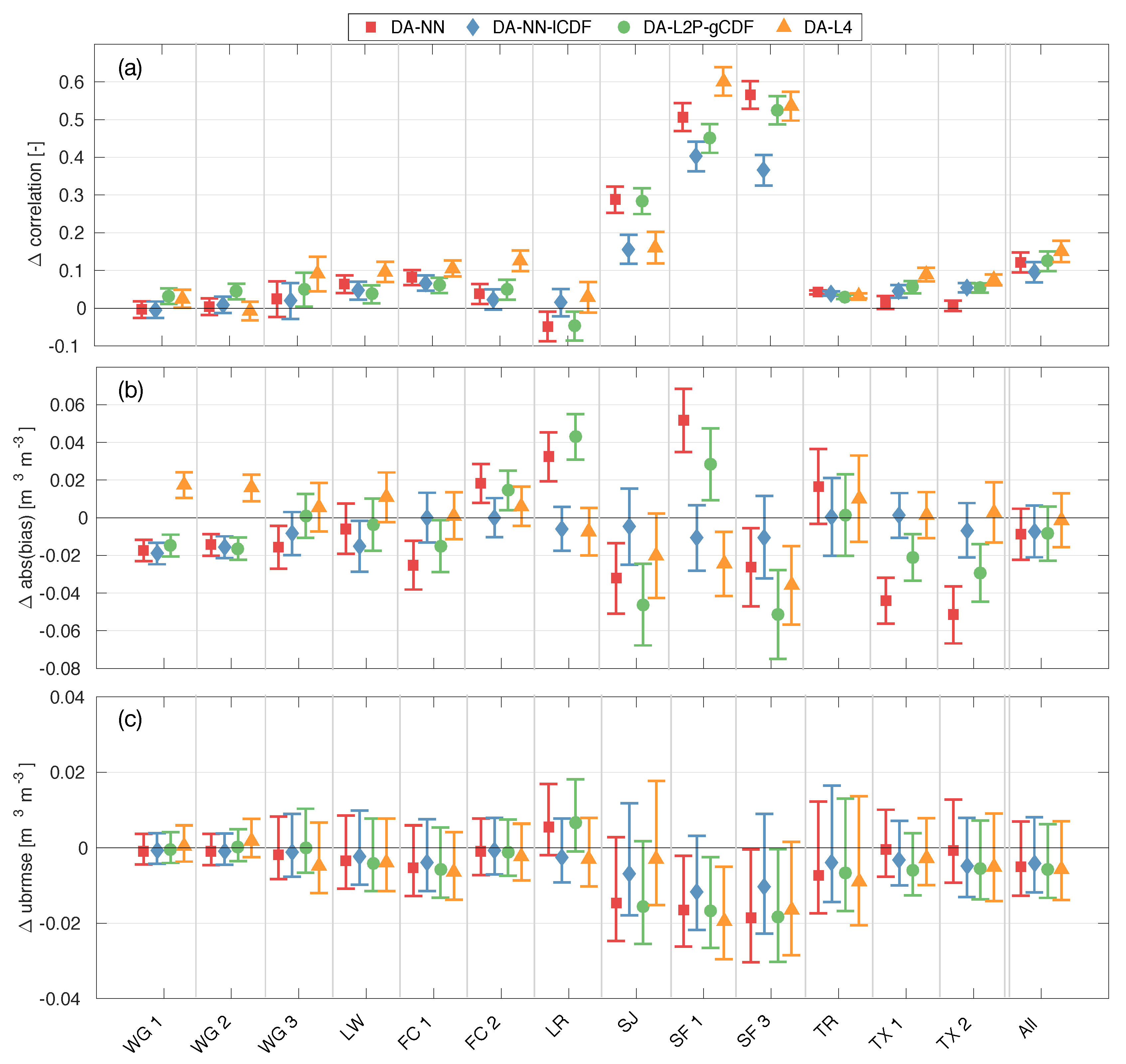
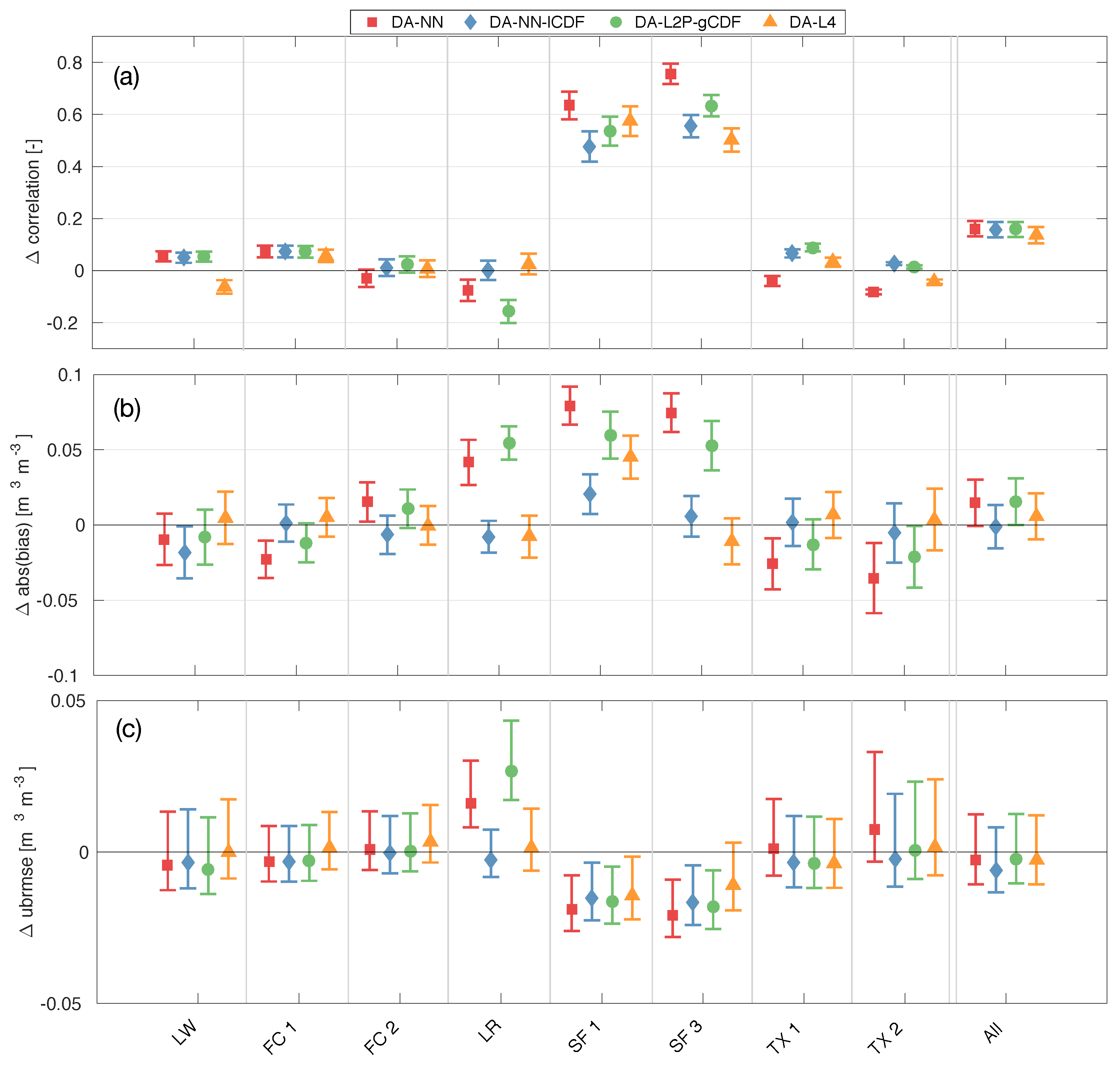
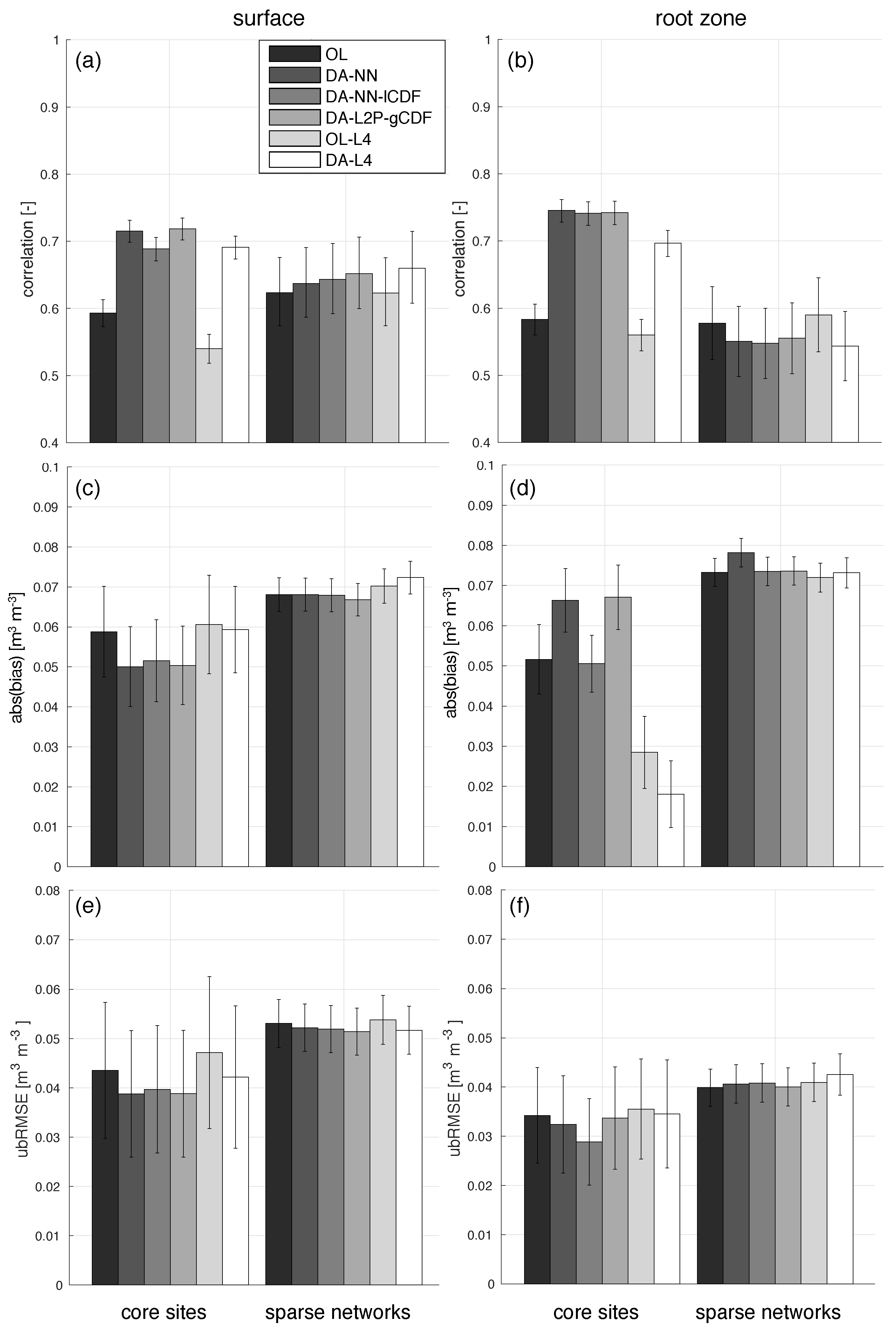
4.1.2. Evaluation Against In Situ Measurements
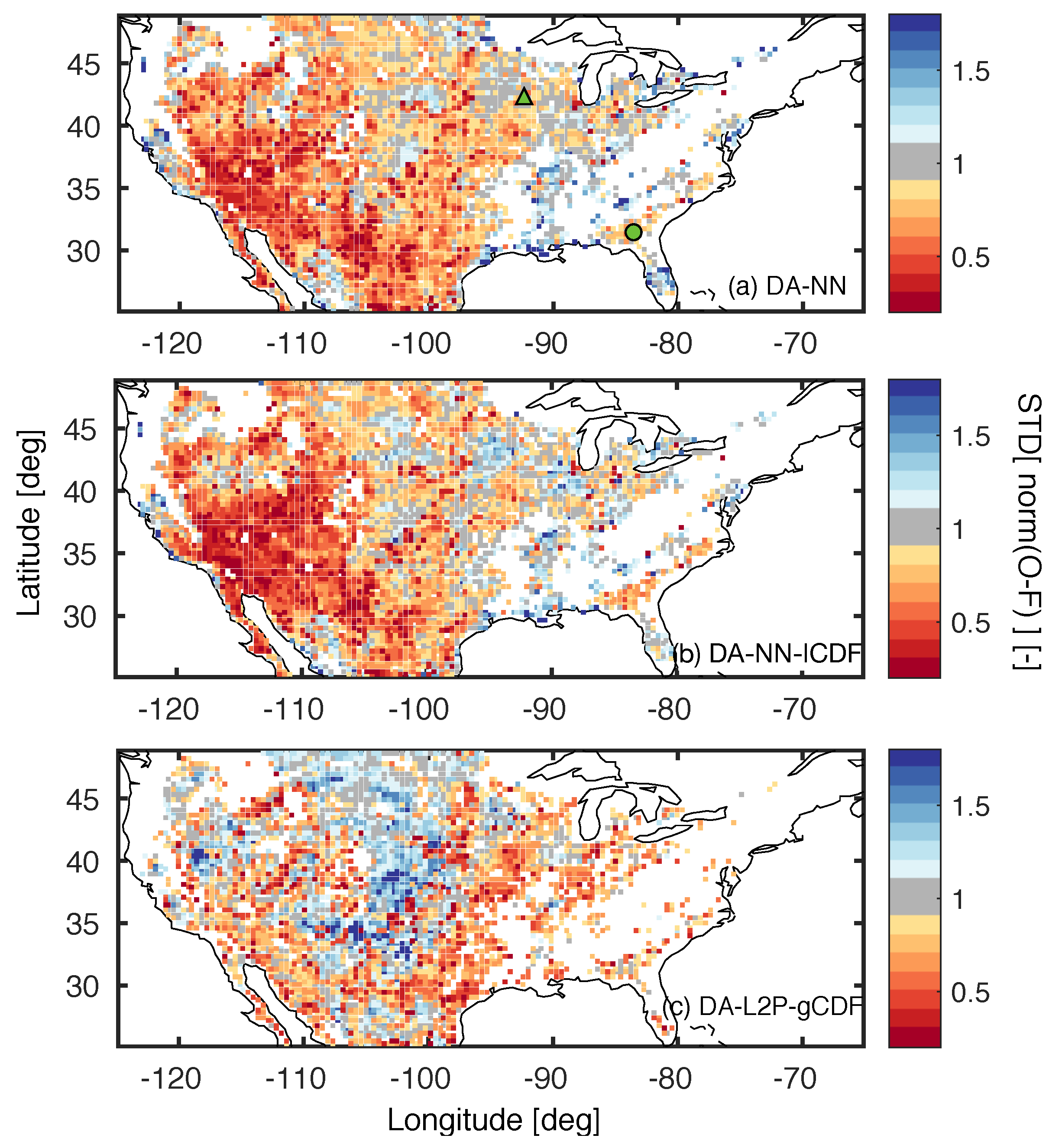
4.1.3. Model and Observation Errors
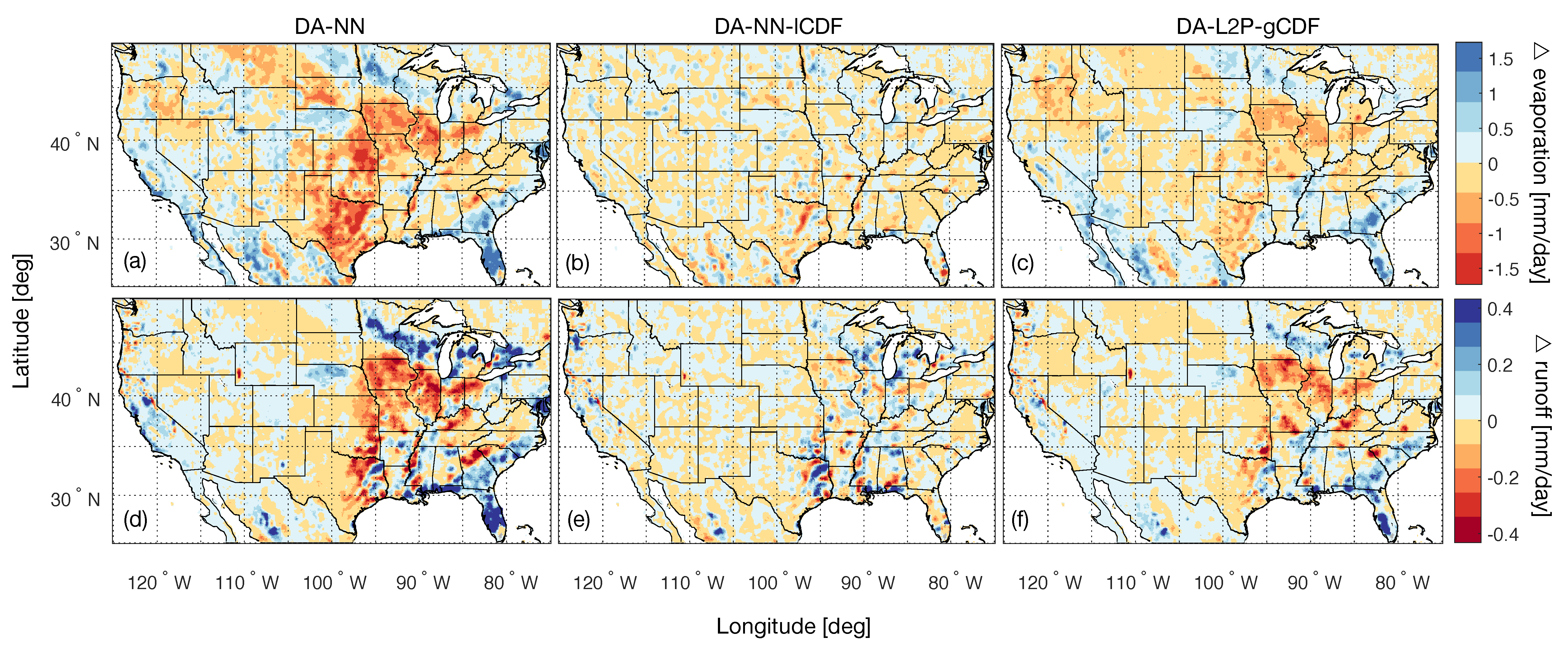
4.1.4. Impact on Related Model Fields
4.1.5. Discussion of DA-NN and DA-NN-lCDF Results
4.2. Assimilation of NN vs. L2P Retrievals
4.2.1. Mean Soil Moisture Statistics
4.2.2. Evaluation against In Situ Measurements
4.2.3. Model and Observation Errors
4.2.4. Impact on Related Model Fields
4.2.5. Discussion of DA-NN and DA-L2P-gCDF Results
4.3. Assimilation of Soil Moisture vs. Brightness Temperatures
5. Conclusions and Perspectives
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Seneviratne, S.I.; Lüthi, D.; Litschi, M.; Schär, C. Land-atmosphere coupling and climate change in Europe. Nature 2006, 443, 205–209. [Google Scholar] [CrossRef] [PubMed]
- Bateni, S.M.; Entekhabi, D. Relative efficiency of land surface energy balance components. Water Resour Res. 2012, 48. [Google Scholar] [CrossRef]
- Assouline, S. Infiltration into soils: Conceptual approaches and solutions. Water Resour Res. 2013, 49, 1755–1772. [Google Scholar] [CrossRef]
- Jung, M.; Reichstein, M.; Schwalm, C.R.; Huntingford, C.; Sitch, S.; Ahlström, A.; Arneth, A.; Camps-Valls, G.; Ciais, P.; Friedlingstein, P.; et al. Compensatory water effects link yearly global land CO2 sink changes to temperature. Nature 2017, 541, 516–520. [Google Scholar] [CrossRef] [PubMed]
- World Meteorological Organization-Global Climate Observing System. Guideline for the Generation of Satellite-Based Datasets and Products Meeting GCOS Requirements. WMO Technical Document 1488. 2009. Available online: https://public.wmo.int/en/programmes/global-climate-observing-system/Publications/gcos-143.pdf (accessed on 4 June 2017).
- Jackson, T.J.; Hsu, A.Y.; Van de Griend, A.; Eagleman, J.R. Skylab L-band microwave radiometer observations of soil moisture revisited. Int. J. Remote Sens. 2004, 25, 2585–2606. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N. The Soil Moisture Active Passive (SMAP) Mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.-P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.-J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS Mission: New Tool for Monitoring Key Elements of the Global Water Cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef]
- Al Bitar, A.; Leroux, D.; Kerr, Y.H.; Merlin, O.; Richaume, P.; Sahoo, A.; Wood, E.F. Evaluation of SMOS soil moisture products over continental US using the SCAN/SNOTEL network. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1572–1586. [Google Scholar] [CrossRef]
- Chan, S.K.; Bindlish, R.; O’Neill, P.E.; Njoku, E.; Jackson, T.; Colliander, A.; Chen, F.; Burgin, M.; Dunbar, S.; Piepmeier, J.; et al. Assessment of the SMAP passive soil moisture product. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4994–5007. [Google Scholar] [CrossRef]
- Reichle, R.H. Data assimilation methods in the Earth sciences. Adv. Water Resour. 2008, 31, 1411–1418. [Google Scholar] [CrossRef]
- Bolten, J.D.; Crow, W.T.; Zhan, X.; Jackson, T.J.; Reynolds, C.A. Evaluating the utility of remotely sensed soil moisture retrievals for operational agricultural drought monitoring. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 57–66. [Google Scholar] [CrossRef]
- Liu, Q.; Reichle, R.H.; Bindlish, R.; Cosh, M.H.; Crow, W.T.; de Jeu, R.; De Lannoy, G.J.; Huffman, G.J.; Jackson, T.J. The contributions of precipitation and soil moisture observations to the skill of soil moisture estimates in a land data assimilation system. J. Hydrometeorol. 2011, 12, 750–765. [Google Scholar] [CrossRef]
- Draper, C.S.; Reichle, R.H.; De Lannoy, G.J.M.; Liu, Q. Assimilation of passive and active microwave soil moisture retrievals. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef]
- De Rosnay, P.; Drusch, M.; Vasiljevic, D.; Balsamo, G.; Albergel, C.; Isaksen, L. A simplified Extended Kalman Filter for the global operational soil moisture analysis at ECMWF. Q. J. R. Meteorol. Soc. 2013, 139, 1199–1213. [Google Scholar] [CrossRef]
- De Lannoy, G.J.; Reichle, R.H. Global assimilation of multiangle and multipolarization SMOS brightness temperature observations into the GEOS-5 catchment land surface model for soil moisture estimation. J. Hydrometeorol. 2016, 17, 669–691. [Google Scholar] [CrossRef]
- De Lannoy, G.J.; Reichle, R.H. Assimilation of SMOS brightness temperatures or soil moisture retrievals into a land surface model. Hydrol. Earth Syst. Sci. 2016, 20, 4895. [Google Scholar] [CrossRef]
- Reichle, R.; De Lannoy, G.; Liu, Q.; Ardizzone, J.V.; Colliander, A.; Conaty, A.; Crow, W.; Jackson, T.J.; Jones, L.A.; Kimball, J.S.; et al. Assessment of the SMAP Level-4 Surface and Root-Zone Soil Moisture Product using in situ measurements. J. Hydrometeorol. 2017, 18, 2621–2645. [Google Scholar] [CrossRef]
- Crow, W.T.; Van den Berg, M.J. An improved approach for estimating observation and model error parameters in soil moisture data assimilation. Water Resour Res. 2010, 46. [Google Scholar] [CrossRef]
- Kumar, S.V.; Reichle, R.H.; Harrison, K.W.; Peters Lidard, C.D.; Yatheendradas, S.; Santanello, J.A. A comparison of methods for a priori bias correction in soil moisture data assimilation. Water Resour Res. 2012, 48. [Google Scholar] [CrossRef]
- De Lannoy, G.J.; Reichle, R.H.; Houser, P.R.; Pauwels, V.; Verhoest, N.E. Correcting for forecast bias in soil moisture assimilation with the ensemble Kalman filter. Water Resour Res. 2007, 43. [Google Scholar] [CrossRef]
- Kalnay, E. Atmospheric Modeling, Data Assimilation and Predictability; Cambridge University Press: Cambridge, UK, 2003; ISBN 978-0521796293. [Google Scholar]
- Reichle, R.H.; Koster, R.D. Bias reduction in short records of satellite soil moisture. Geophys. Res. Lett. 2004, 31, L19501. [Google Scholar] [CrossRef]
- Drusch, M.; Wood, E.F.; Gao, H. Observation operators for the direct assimilation of TRMM microwave imager retrieved soil moisture. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Kolassa, J.; Reichle, R.H.; Liu, Q.; Alemohammad, S.H.; Gentine, P.; Aida, K.; Asanuma, J.; Bircher, S.; Caldwell, T.; Colliander, A.; et al. Estimating surface soil moisture from SMAP observations using a Neural Network technique. Remote Sens. Environ. 2017. [Google Scholar] [CrossRef]
- Brodzik, M.J.; Billingsley, B.; Haran, T.; Raup, B.; Savoie, M.H. EASE-grid 2.0: Incremental but significant improvements for Earth-gridded data sets. ISPRS Int. J. Geo-Inf. 2012, 1, 32–45. [Google Scholar] [CrossRef]
- Chan, S.; Njoku, E.G.; Colliander, A. SMAP L1C Radiometer Half-Orbit 36 km EASE-Grid Brightness Temperatures, Version 3; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2016.
- O’Neill, P.; Chan, S.; Njoku, E.; Jackson, T.; Bindlish, R. SMAP Algorithm Theoretical Basis Document: L2 & L3 Radiometer Soil Moisture (Passive) Products; Jet Propulsion Laboratory: Pasadena, CA, USA, 2015; Available online: https://nsidc.org/sites/nsidc.org/files/technical-references/L2_SM_P_ATBD_v7_Sep2015-po-en.pdf (accessed on 1 May 2017).
- Jimenez, C.; Clark, D.B.; Kolassa, J.; Aires, F.; Prigent, C. A joint analysis of modeled soil moisture fields and satellite observations. J. Geophys. Res. 2013, 118, 6771–6782. [Google Scholar] [CrossRef]
- Maeda, T.; Taniguchi, Y. Descriptions of GCOM-W1 AMSR2 Level 1R and Level 2 Algorithms; Japan Aerospace Exploration Agency Earth Observation Research Center: Ibaraki, Japan, 2013; Available online: suzaku.eorc.jaxa.jp/GCOM_W/data/doc/NDX-120015A.pdf (accessed on 3 June 2017).
- Wagner, W.; Hahn, S.; Kidd, R.; Melzer, T.; Bartalis, Z.; Hasenauer, S.; Rubel, F. The ASCAT soil moisture product: A review of its specifications, validation results, and emerging applications. Meteorol. Z. 2013, 22, 5–33. [Google Scholar] [CrossRef]
- Wigneron, J.P.; Chanzy, A.; Calvet, J.C.; Bruguier, N. A simple algorithm to retrieve soil moisture and vegetation biomass using passive microwave measurements over crop fields. Remote Sens. Environ. 1995, 51, 331–341. [Google Scholar] [CrossRef]
- Lucchesi, R. File Specification for GEOS-5 FP. NASA Global Modeling and Assimilation Office (GMAO) Office Note No. 4 (Version 1.0). p. 63. Available online: http://gmao.gsfc.nasa.gov/pubs/office_notes (accessed on 1 May 2017).
- O’Neill, P.E.; Chan, S.; Njoku, E.G.; Jackson, T.; Bindlish, R. SMAP L2 Radiometer Half-Orbit 36 km EASE-Grid Soil Moisture; Version 4; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2016.
- Reichle, R.H.; Koster, R.; De Lannoy, G.; Crow, W.; Kimball, J. SMAP Level 4 Surface and Root Zone Soil Moisture Data Product: L4_SM Algorithm Theoretical Basis Document (Revision A), Soil Moisture Active Passive (SMAP) Mission Science Document; Jet Propulsion Laboratory: Pasadena, CA, USA, 2014; Available online: https://nsidc.org/sites/nsidc.org/files/technical-references/272_L4_SM_RevA_web.pdf (accessed on 1 May 2017).
- Mohammed-Tano, P.; Piepmeier, J.; Weiss, B.; Hanna, M.; Yueh, S.; Cuddy, D. Soil Moisture Active Passive (SMAP) Project: Level 1B_TB Product Specification Document; SMAP Project, JPL D-92339; Jet Propulsion Laboratory: Pasadena, CA, USA, 2015; Available online: https://nsidc.org/data/SPL1BTB/versions/3 (accessed on 15 May 2017).
- Reichle, R.; De Lannoy, G.; Koster, R.D.; Crow, W.T.; Kimball, J.S. SMAP L4 9 km EASE-Grid Surface and Root Zone Soil Moisture Analysis Update; Version 2; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2016.
- Colliander, A.; Jackson, T.J.; Bindlish, R.; Chan, S.; Das, N.; Kim, S.B.; Cosh, M.H.; Dunbar, R.S.; Dang, L.; Pashaian, L. Validation of SMAP surface soil moisture products with core validation sites. Remote Sens. Environ. 2017, 191, 215–231. [Google Scholar] [CrossRef]
- Schaefer, G.L.; Cosh, M.H.; Jackson, T.J. The USDA natural resources conservation service soil climate analysis network (SCAN). J. Atmos. Ocean. Technol. 2007, 24, 2073–2077. [Google Scholar] [CrossRef]
- Diamond, H.J.; Karl, T.R.; Palecki, M.A.; Baker, C.B.; Bell, J.E.; Leeper, R.D.; Easterling, D.R.; Lawrimore, J.H.; Meyers, T.P.; Helfert, M.R.; et al. US Climate Reference Network after one decade of operations: Status and assessment. Bull. Am. Meteorol. Soc. 2013, 94, 485–498. [Google Scholar] [CrossRef]
- Palecki, M.A.; Bell, J.E. US Climate Reference Network soil moisture observations with triple redundancy: Measurement variability. Vadose Zone J. 2013, 12. [Google Scholar] [CrossRef]
- De Lannoy, G.J.; Koster, R.D.; Reichle, R.H.; Mahanama, S.P.; Liu, Q. An updated treatment of soil texture and associated hydraulic properties in a global land modeling system. J. Adv. Model. Earth Syst. 2014, 6, 957–979. [Google Scholar] [CrossRef]
- Reichle, R.H.; De Lannoy, G.J.; Liu, Q.; Colliander, A.; Conaty, A.; Jackson, T.; Kimball, J.; Koster, R.D. Soil Moisture Active Passive (SMAP) Project Assessment Report for the Beta-Release L4_SM Data Product. NASA Technical Report Series on Global Modeling and Data Assimilation. NASA/TM-2015-104606. 2015, pp. 40–63. Available online: https://nsidc.org/sites/nsidc.org/files/technical-references/Reichle788.pdf (accessed on 1 May 2017).
- Reichle, R.H.; Liu, Q. Observation-Corrected Precipitation Estimates in GEOS-5; NASA/TM 2014-104606; NASA Global Modeling and Assimilation Office: Greenbelt, MD, USA, 2014; Volume 35.
- Reichle, R.H.; Liu, Q.; Koster, R.D.; Draper, C.S.; Mahanama, S.P.; Partyka, G.S. Land surface precipitation in MERRA-2. J. Clim. 2017, 30, 1643–1664. [Google Scholar] [CrossRef]
- Reichle, R.H.; Koster, R.D. Assessing the impact of horizontal error correlations in background fields on soil moisture estimation. J. Hydrometeorol. 2003, 4, 1229–1242. [Google Scholar] [CrossRef]
- Gaspari, G.; Cohn, S.E. Construction of correlation functions in two and three dimensions. Q. J. R. Meteorol. Soc. 1999, 125, 723–757. [Google Scholar] [CrossRef]
- He, L.; Chen, J.M.; Liu, J.; Bélair, S.; Luo, X. Assessment of SMAP soil moisture for global simulation of gross primary production. J. Geophys. Res. Biogeosci. 2017. [Google Scholar] [CrossRef]
- Chan, S.K.; Bindlish, R.; O’Neill, P.; Jackson, T.; Njoku, E.; Dunbar, S.; Chaubell, J.; Piepmeier, J.; Yueh, S.; Entekhabi, D.; et al. Development and assessment of the SMAP enhanced passive soil moisture product. Remote Sens. Environ. 2017. [CrossRef]
- Reichle, R.H.; Draper, C.S.; Liu, Q.; Girotto, M.; Mahanama, S.P.; Koster, R.D.; De Lannoy, G.J. Assessment of MERRA-2 land surface hydrology estimates. J. Clim. 2017, 30, 2937–2960. [Google Scholar] [CrossRef]
- Draper, C.; Reichle, R. The impact of near-surface soil moisture assimilation at subseasonal, seasonal, and inter-annual timescales. Hydrol. Earth Syst. Sci. 2015, 19, 4831. [Google Scholar] [CrossRef]
- Reichle, R.H.; De Lannoy, G.J.M.; Liu, Q.; Koster, R.D.; Kimball, J.S.; Crow, W.T.; Ardizzone, J.V.; Chakraborty, P.; CollinS, D.W.; Conaty, A.L.; et al. Global Assessment of the SMAP Level-4 Surface and Root-Zone Soil Moisture Product Using Assimilation Diagnostics. J. Hydrometeorol. 2017. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Site Key | RPID | US state | Climate | Land Cover | Root Zone |
|---|---|---|---|---|---|---|
| Walnut Gulch | WG1 | 16010906 | Arizona | arid | shrub open | no |
| WG2 | 16010907 | no | ||||
| WG3 | 16010913 | no | ||||
| Little Washita | LW | 16020907 | Oklahoma | temperate | croplands and pasture | yes |
| Fort Cobb | FC1 | 16030911 | Oklahoma | temperate | croplands and pasture | yes |
| FC2 | 16030916 | yes | ||||
| Little River | LR | 16040901 | Georgia | temperate | croplands/natural mosaic | yes |
| St. Joseph’s | SJ | 16060907 | Indiana | cold | croplands | no |
| South Fork | SF1 | 16070909 | Iowa | cold | croplands | yes |
| SF2 | 16070910 | no | ||||
| SF3 | 16070911 | yes | ||||
| Tonzi Ranch | TR | 25010911 | California | temperate | woody savannas | no |
| TxSON | TX1 | 48010902 | Texas | temperate | grasslands | yes |
| TX2 | 48010911 | yes |
| Type | std dev | Temporal Correlation | Spatial Correlation | Cross Correlation with | |||
|---|---|---|---|---|---|---|---|
| P | DSW | DLW | |||||
| P | M | 0.5 | 24 h | 0.5 deg | - | −0.8 | 0.5 |
| DSW | M | 0.3 | 24 h | 0.5 deg | −0.8 | - | −0.5 |
| DLW | A | 20 W m | 24 h | 0.5 deg | 0.5 | −0.5 | - |
| srfexc | A | 0.24 kg m h | 3 h | 0.3 deg | |||
| catdef | A | 0.16 kg m h | 3 h | 0.3 deg | |||
| Experiment Name | Observations Assimilated | Bias Correction | Model Configuration |
|---|---|---|---|
| OL | none | n/a | Nature Run v5 |
| DA-NN | SMAP NN SM | n/a * | Nature Run v5 |
| DA-NN-lCDF | SMAP NN SM | local CDF-matching | Nature Run v5 |
| DA-L2P-gCDF | SMAP L2P SM | global CDF-matching | Nature Run v5 |
| OL-L4 | none | n/a | Nature Run v4 |
| DA-L4 | SMAP Tb | seasonal climatology matching | Nature Run v4 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolassa, J.; Reichle, R.H.; Liu, Q.; Cosh, M.; Bosch, D.D.; Caldwell, T.G.; Colliander, A.; Holifield Collins, C.; Jackson, T.J.; Livingston, S.J.; et al. Data Assimilation to Extract Soil Moisture Information from SMAP Observations. Remote Sens. 2017, 9, 1179. https://doi.org/10.3390/rs9111179
Kolassa J, Reichle RH, Liu Q, Cosh M, Bosch DD, Caldwell TG, Colliander A, Holifield Collins C, Jackson TJ, Livingston SJ, et al. Data Assimilation to Extract Soil Moisture Information from SMAP Observations. Remote Sensing. 2017; 9(11):1179. https://doi.org/10.3390/rs9111179
Chicago/Turabian StyleKolassa, Jana, Rolf H. Reichle, Qing Liu, Michael Cosh, David D. Bosch, Todd G. Caldwell, Andreas Colliander, Chandra Holifield Collins, Thomas J. Jackson, Stan J. Livingston, and et al. 2017. "Data Assimilation to Extract Soil Moisture Information from SMAP Observations" Remote Sensing 9, no. 11: 1179. https://doi.org/10.3390/rs9111179
APA StyleKolassa, J., Reichle, R. H., Liu, Q., Cosh, M., Bosch, D. D., Caldwell, T. G., Colliander, A., Holifield Collins, C., Jackson, T. J., Livingston, S. J., Moghaddam, M., & Starks, P. J. (2017). Data Assimilation to Extract Soil Moisture Information from SMAP Observations. Remote Sensing, 9(11), 1179. https://doi.org/10.3390/rs9111179