
Monitoring Annual Urban Changes in a Rapidly Growing Portion of Northwest Arkansas with a 20-Year Landsat Record



Abstract
:1. Introduction
- Test our algorithm in a highly heterogeneous urban landscape to map the urban extent on a yearly basis;
- Quantify the patterns and trends of urban growth in NWA based on the generated urban extent maps.
2. Materials and Methods
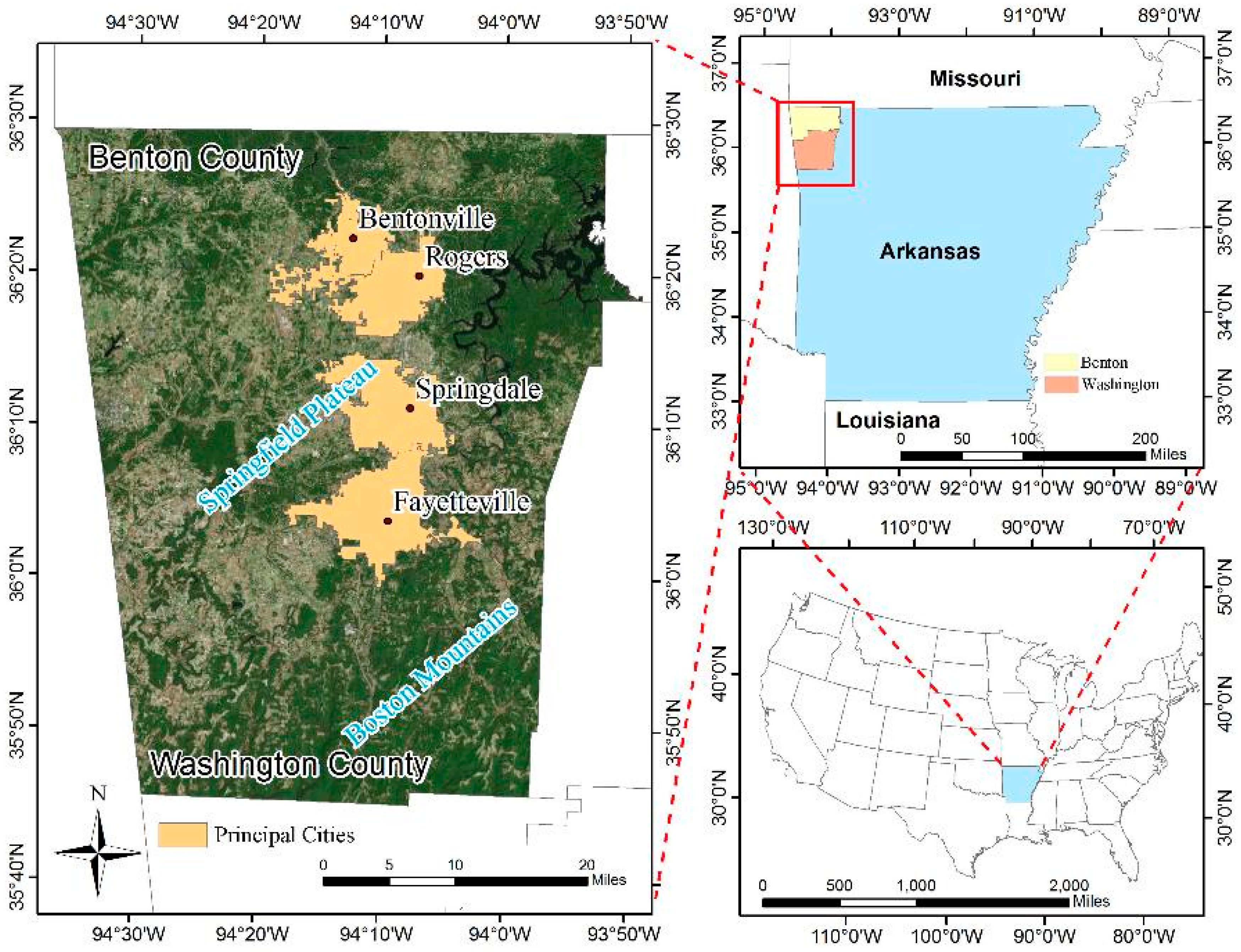
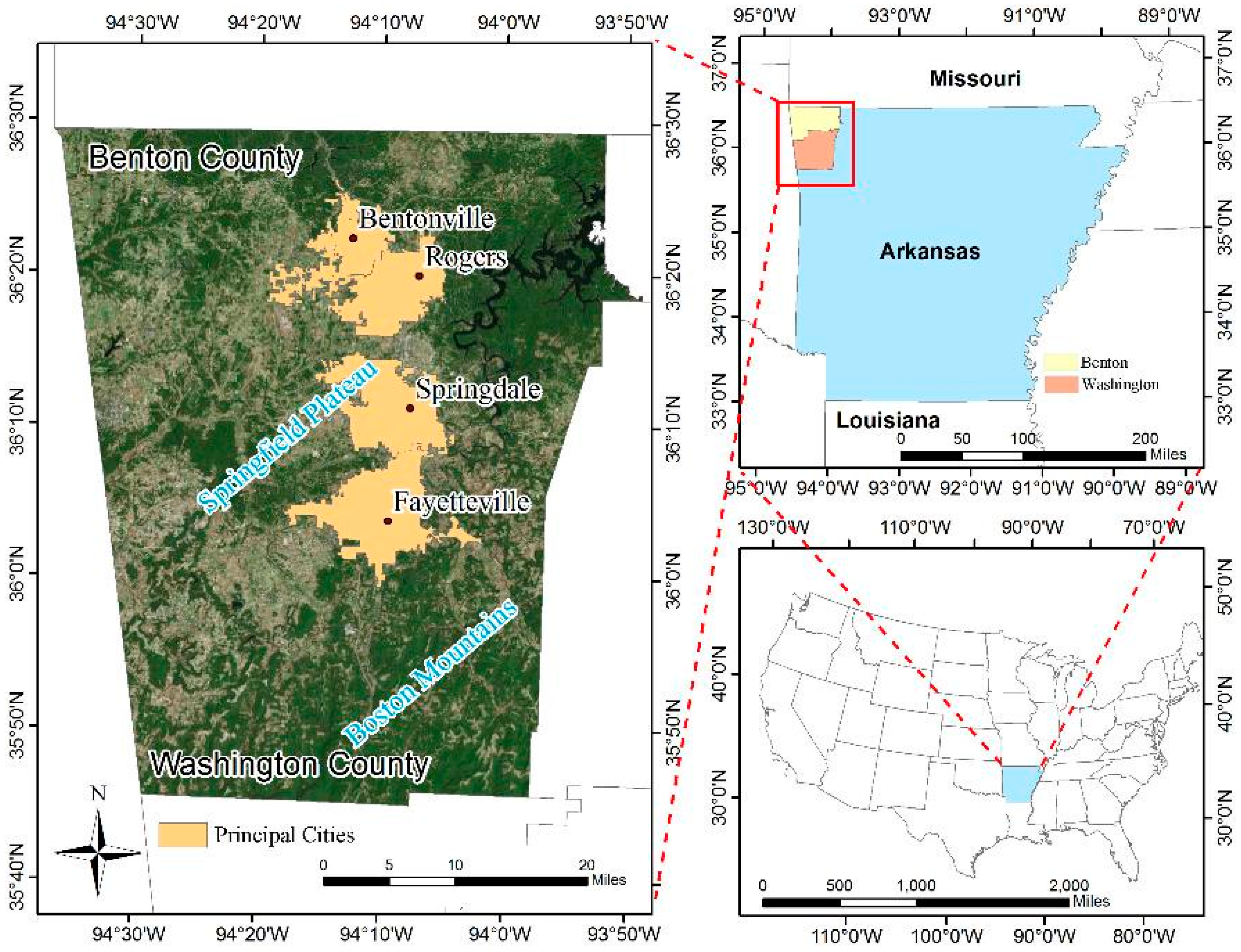
2.1. Study Area
2.2. Image Acquisition and Preprocessing
2.3. Classification System and Classification Sample Selection
- Low-intensity urban: a less developed area where impervious surfaces account for 50% to 80% of the total cover, mostly containing residential areas such as neighborhoods, apartments, and roadways [36,37]. Dirt and gravel roads were not included in either of the urban classes due to their spectral signatures being similar to bare soils, harvested croplands, and water coastlines. To minimize confusion, only paved roads were included in the classification scheme;
- Agriculture/Pasture/Bare Lands: open areas of crops planted by farmers, grass, or other short vegetative growth in fields and bare patches of lands that lack intense vegetation. In NWA, due to Tyson Foods Inc., there are many pasture lands that are dedicated to the cultivation and harvest of poultry and beef. Agriculture in NWA is not as common as it is in the rest of Arkansas, but is present in the region. Bare lands are areas that have not been used for agriculture or pasture for animals, and are usually land stocks for urban expansion;
- Forest: an area that is dominated mostly by dense tree cover. NWA contains a number of national forests and parks, including the Ozark National Forest. These forested areas are, for the most part, very homogeneous in nature, containing about 80% to 100% tree cover with very little gaps. These gaps would be classified into the Agriculture/Pasture/Bare lands classification;
- Water: includes lakes, ponds, rivers, streams, and creeks that are visually identifiable on the Landsat imagery.
- More than 30 samples required for each class, which is the standard number of minimum samples necessary for accurate classification based on the sample size formula as recommended by [39].
- Samples needed to be greater than four pixels in size.
- Samples needed to be homogeneous in nature.
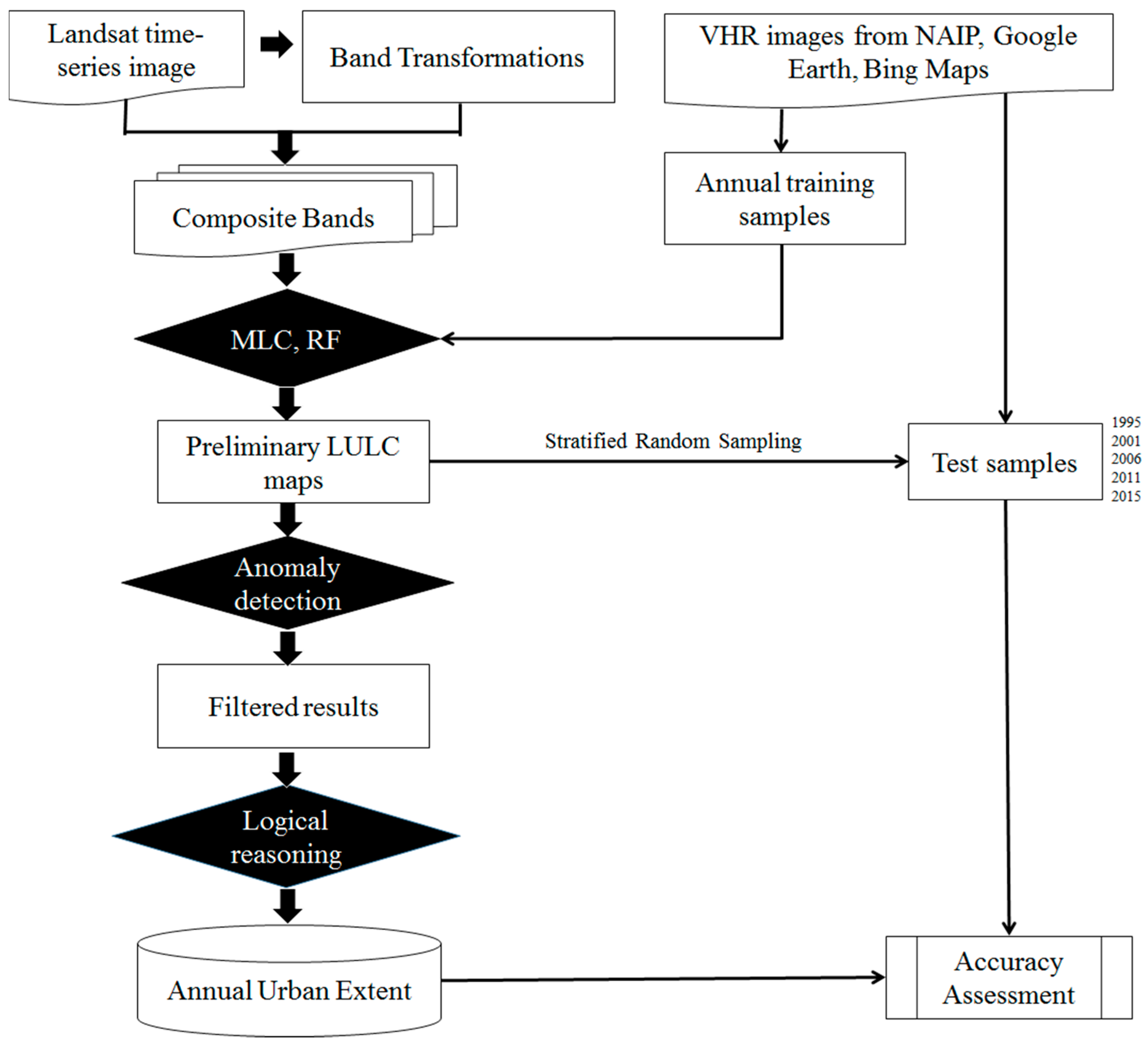
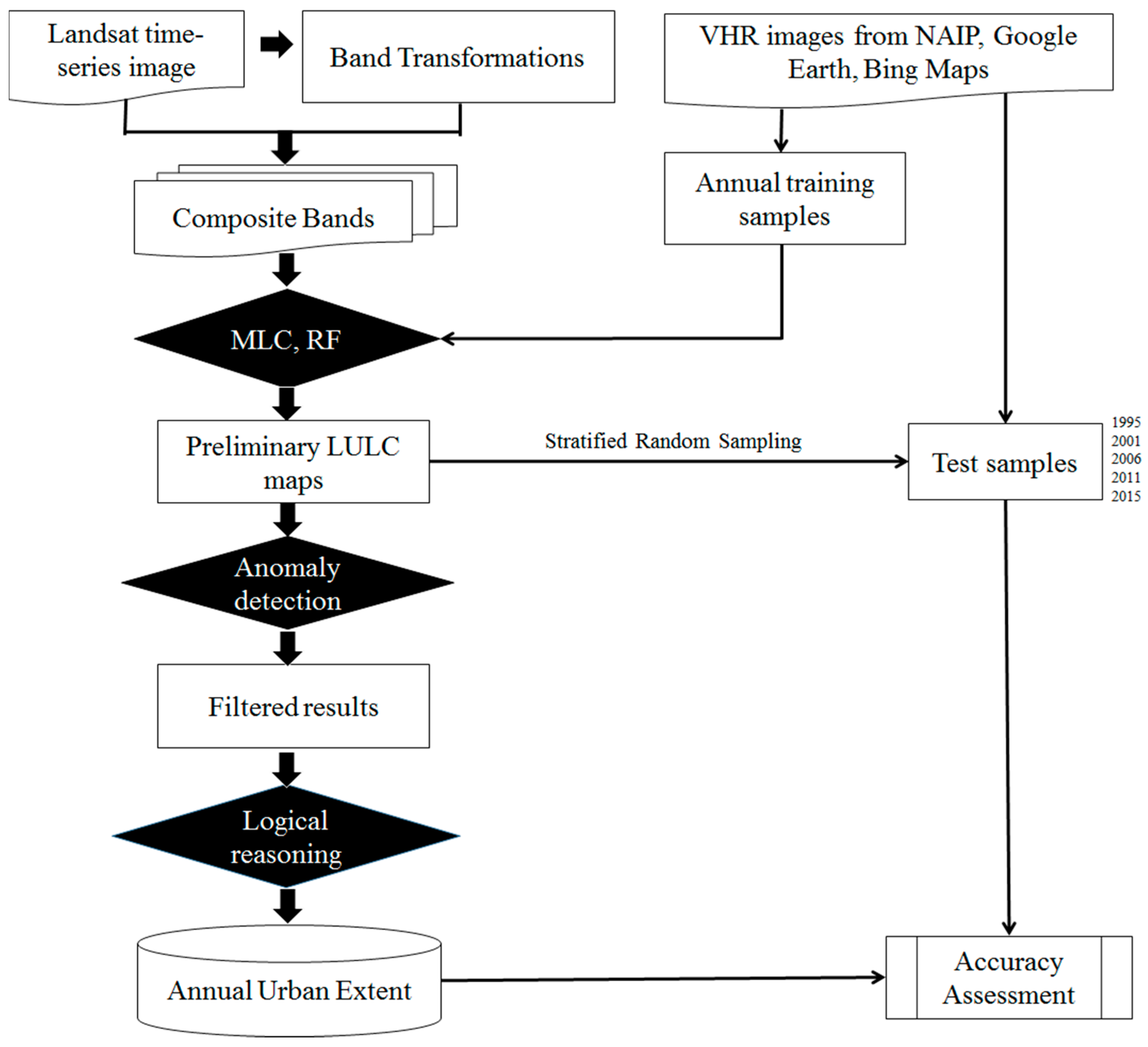
2.4. Classification Framework
2.4.1. Preliminary Classification
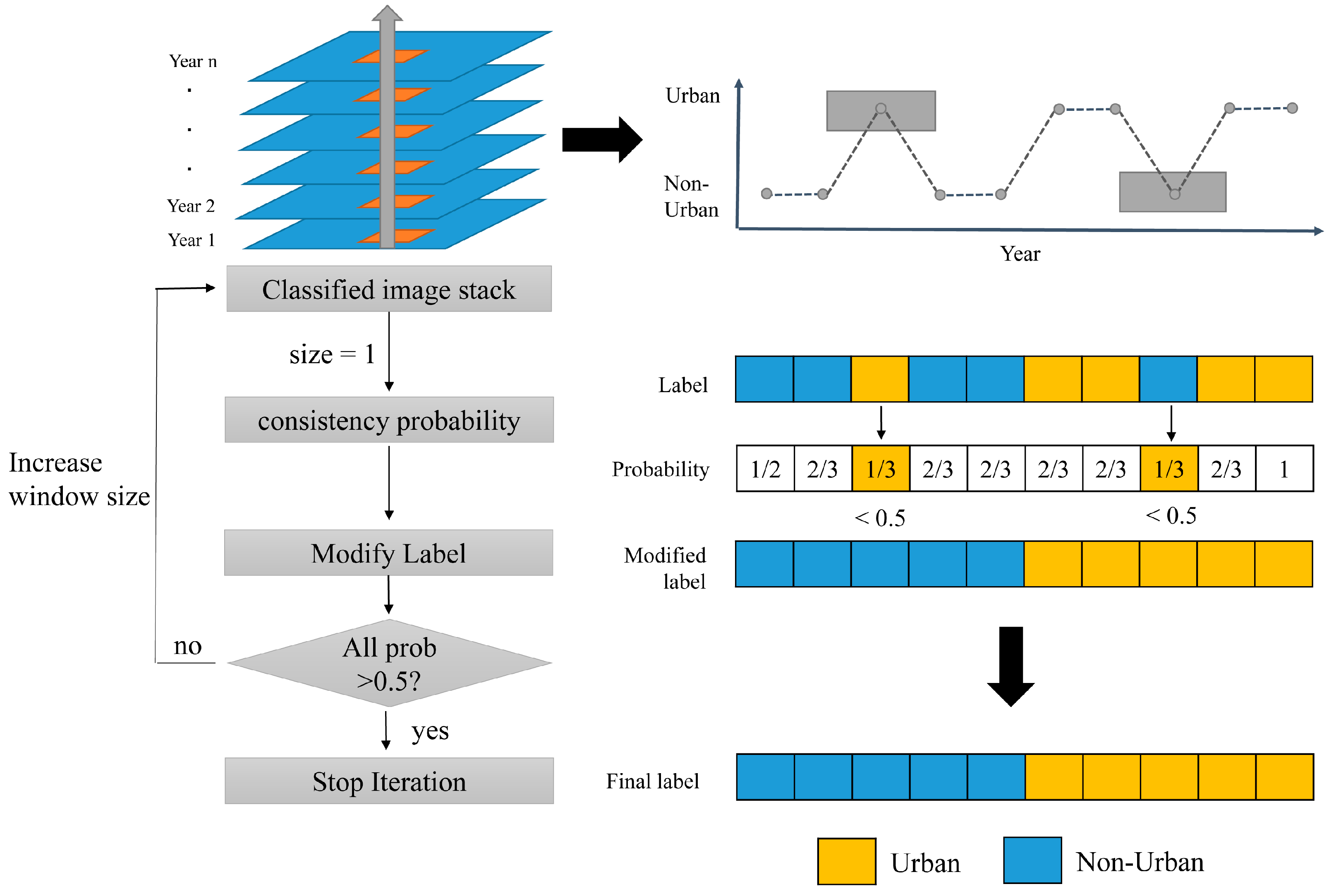
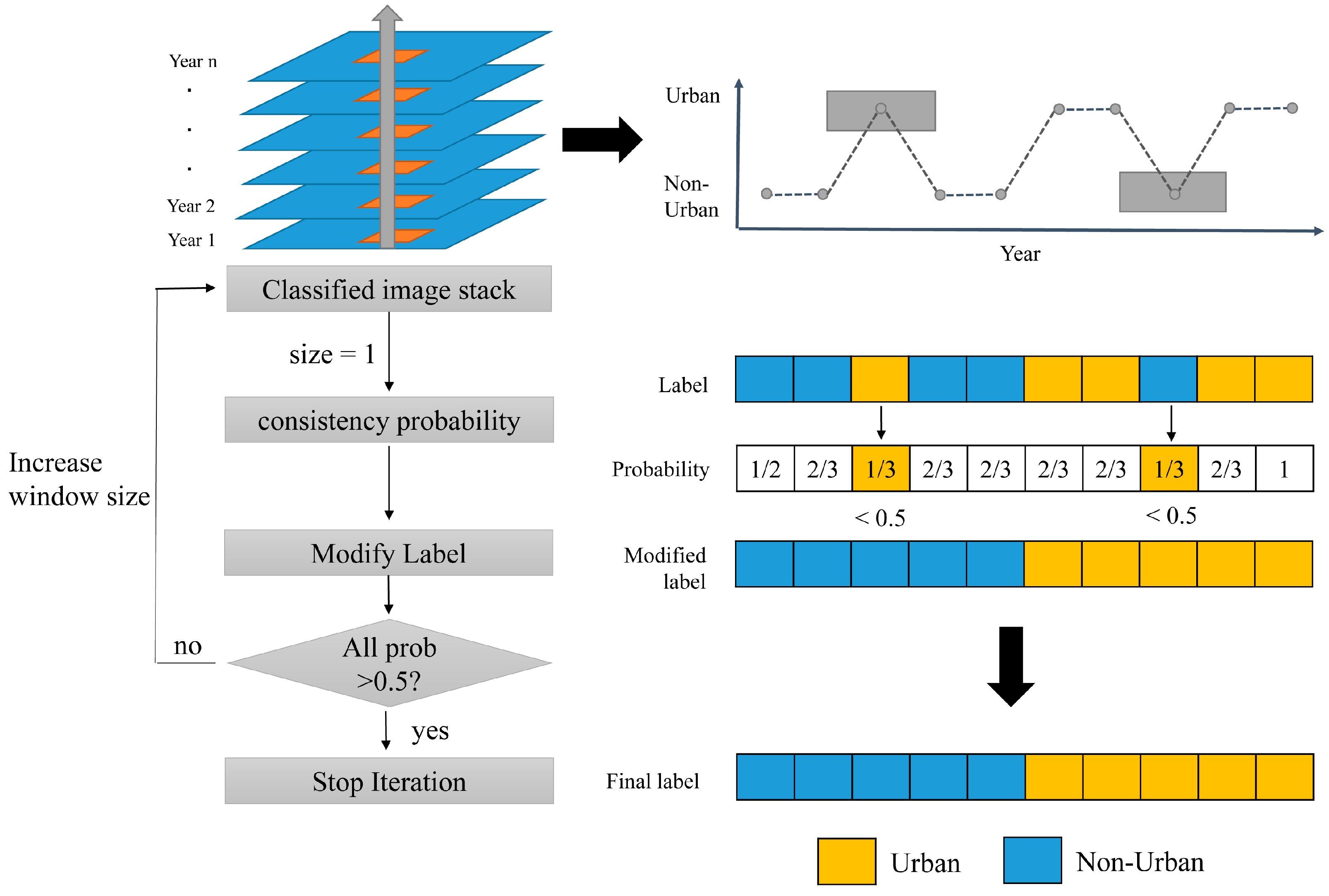
2.4.2. Anomaly Detection and Temporal Filtering
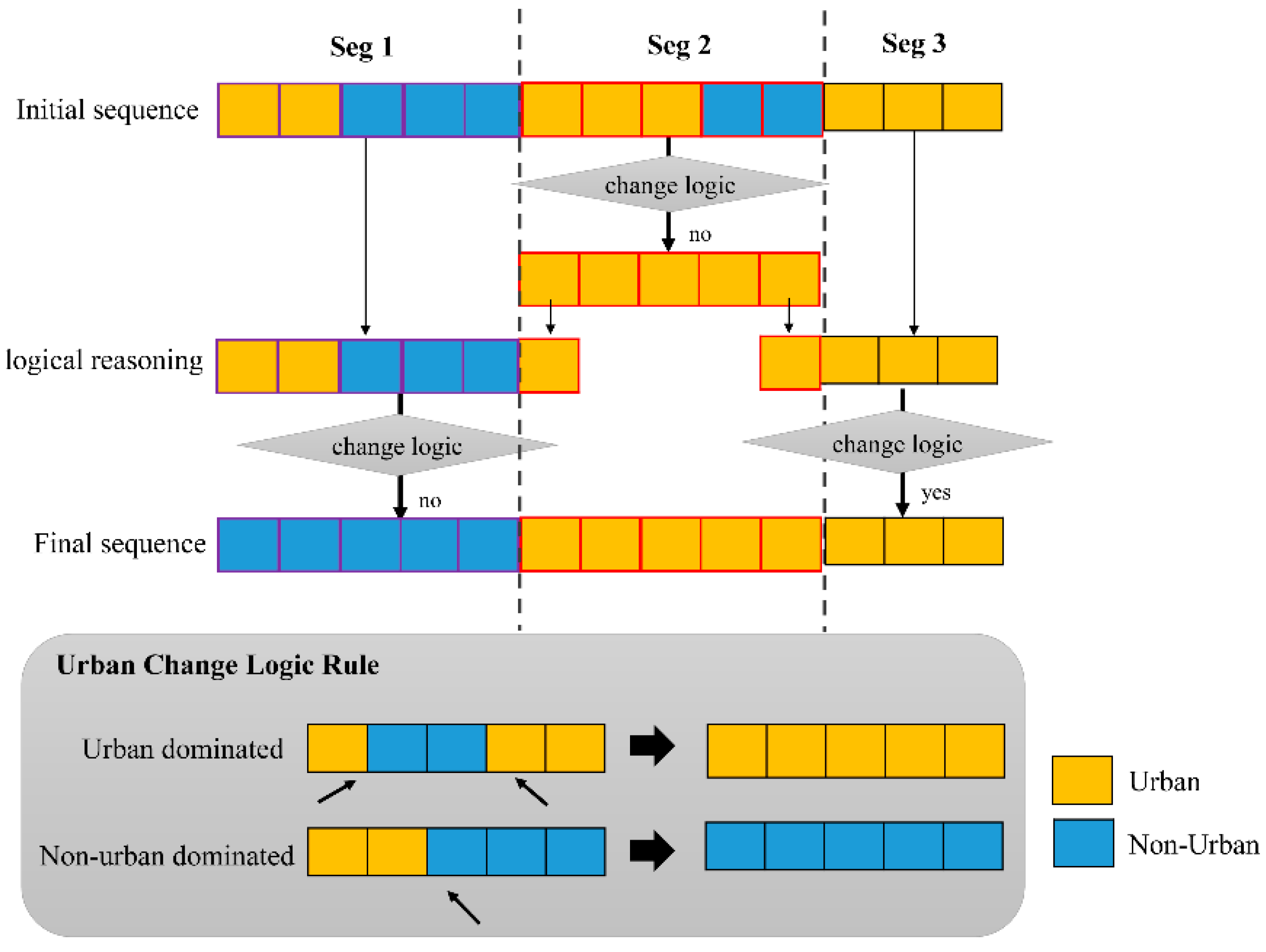
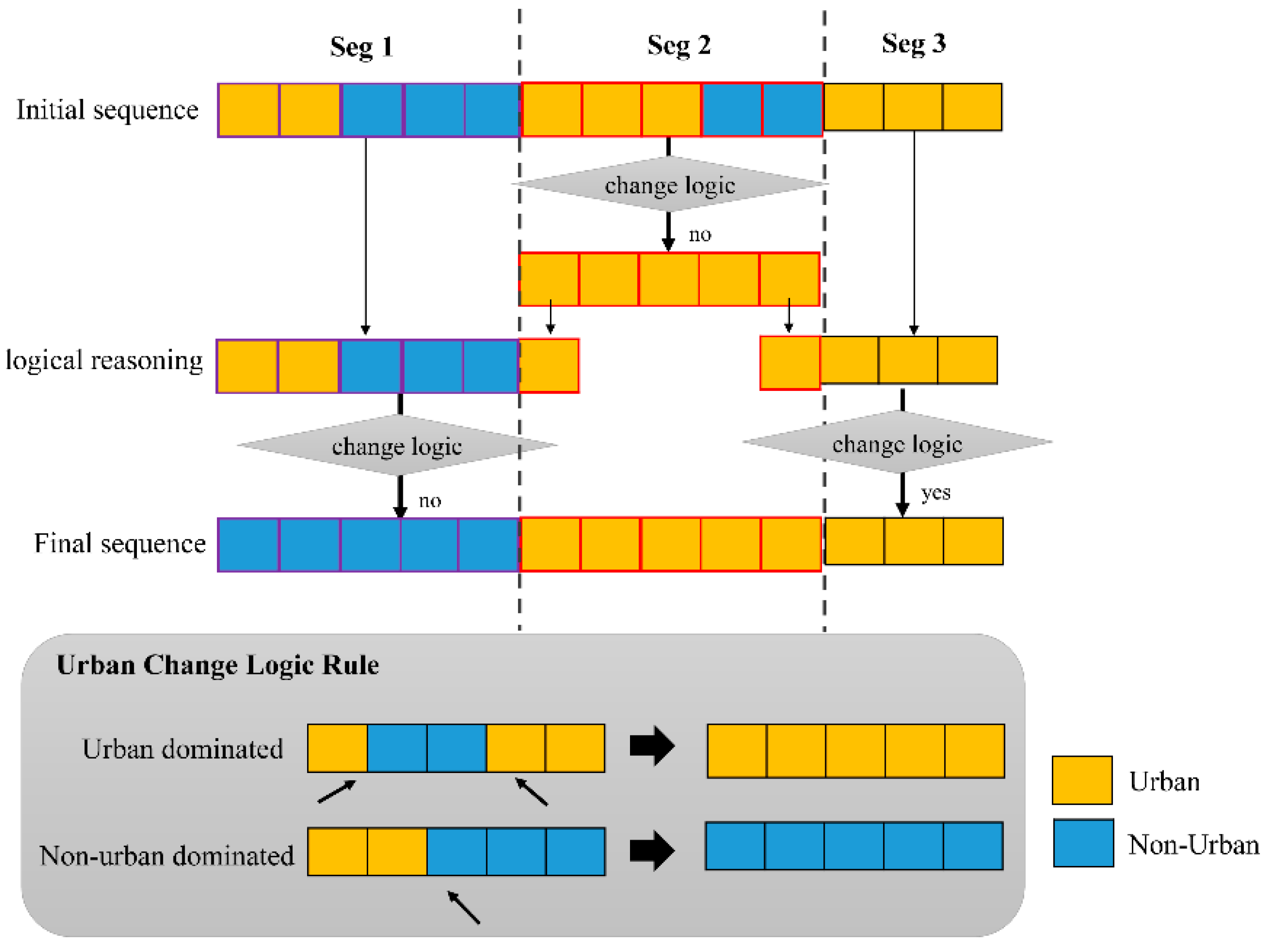
2.4.3. Urban Change Logic Rule
2.5. Accuracy Assessment
3. Results
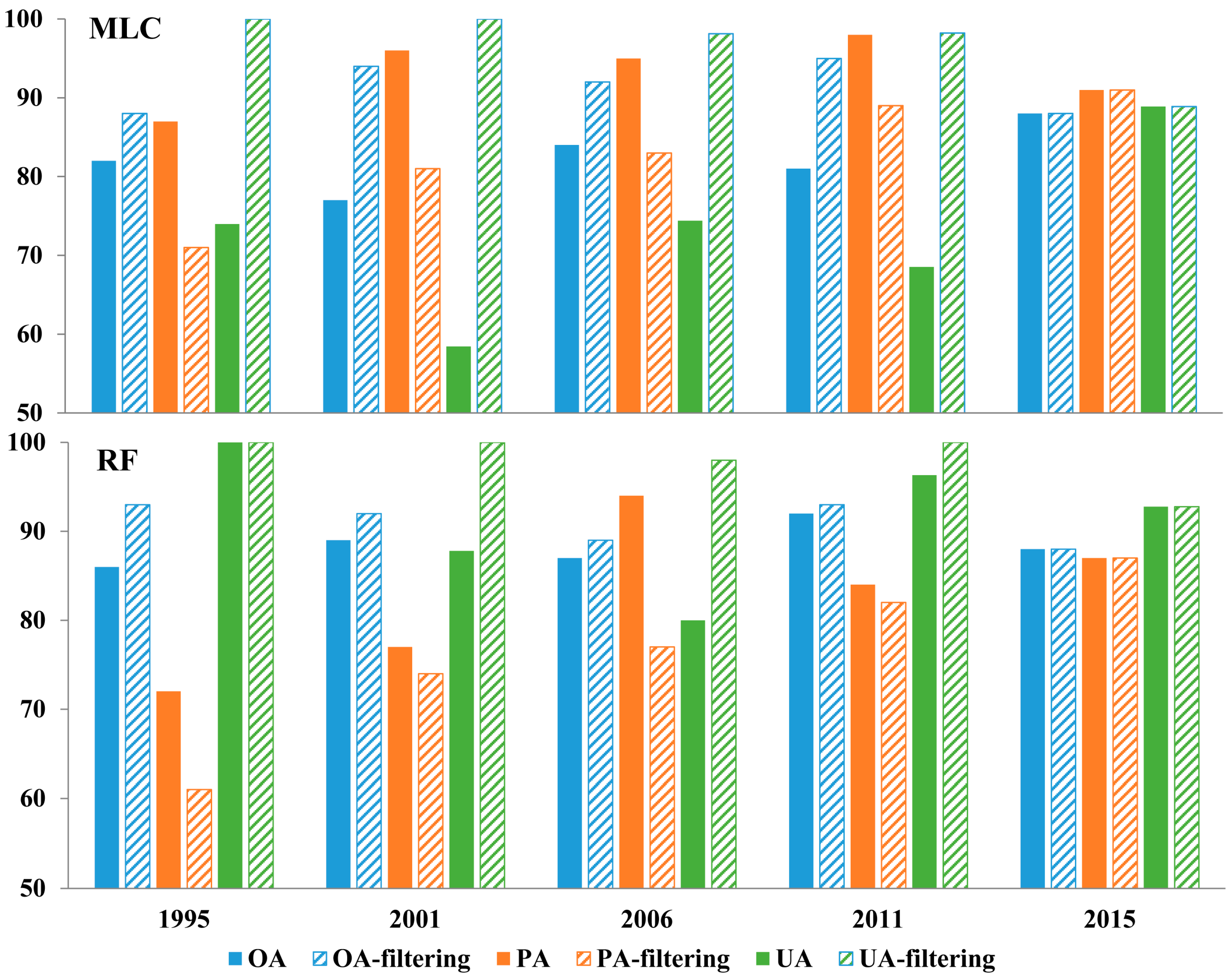
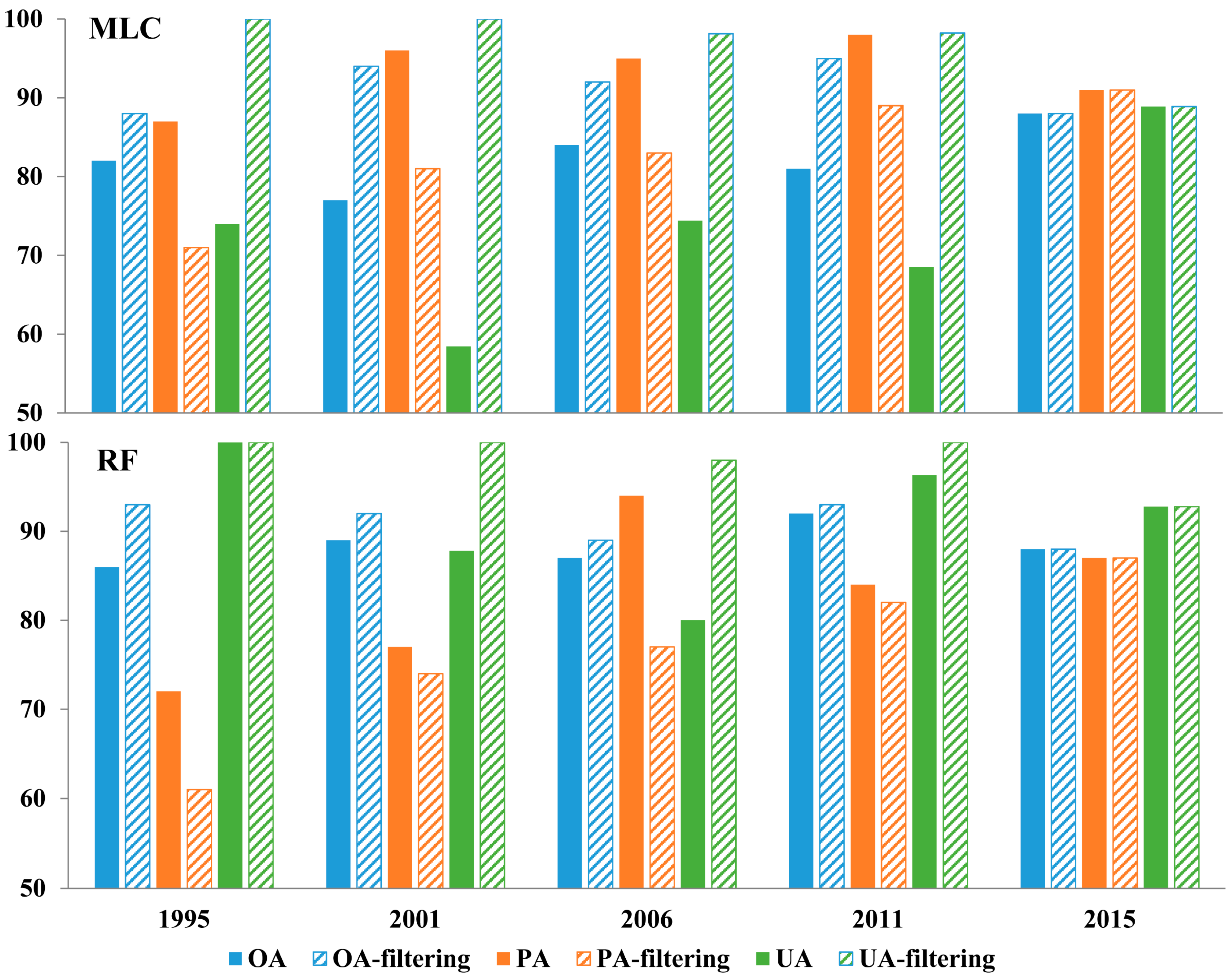
3.1. Accuracy Assessment
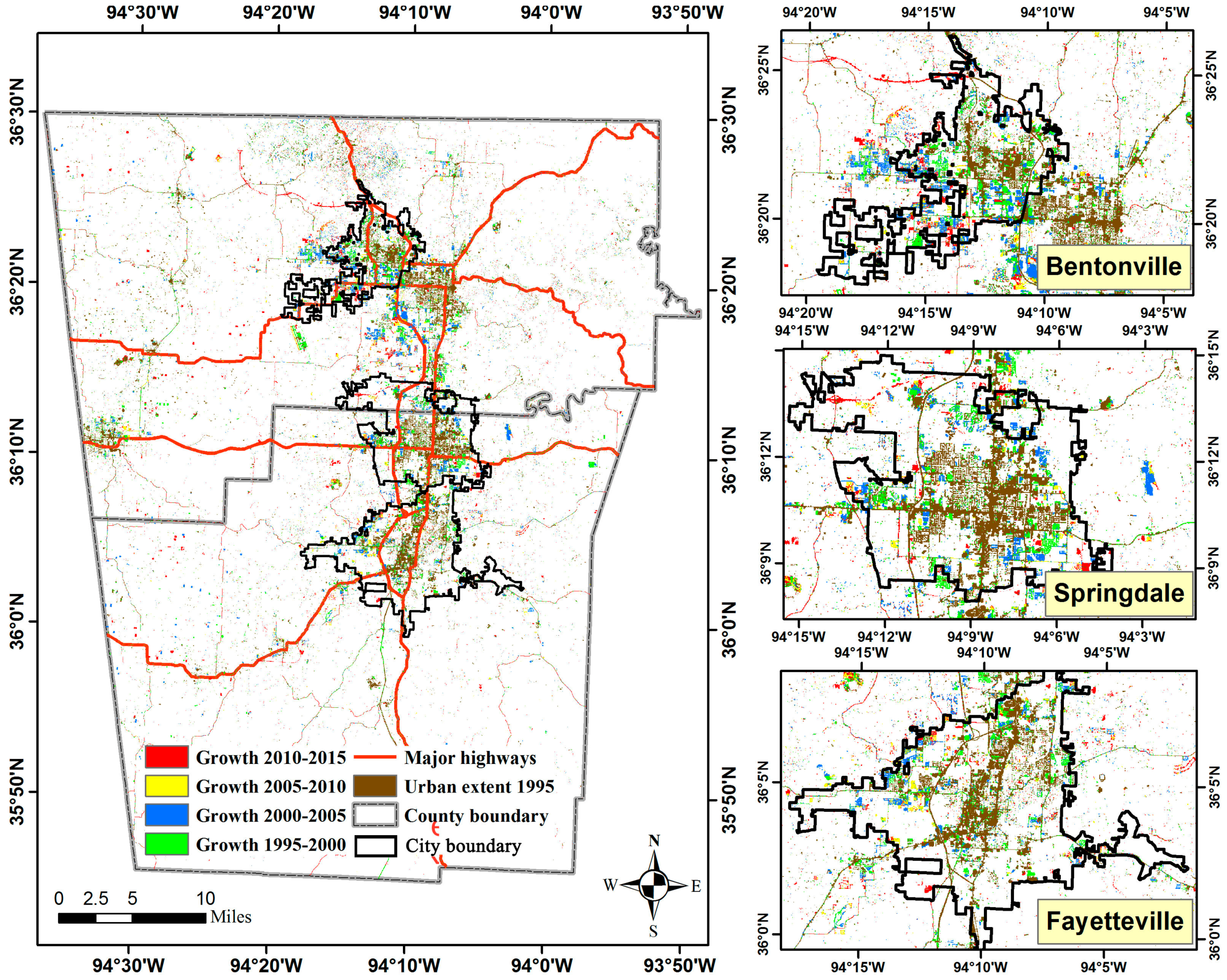
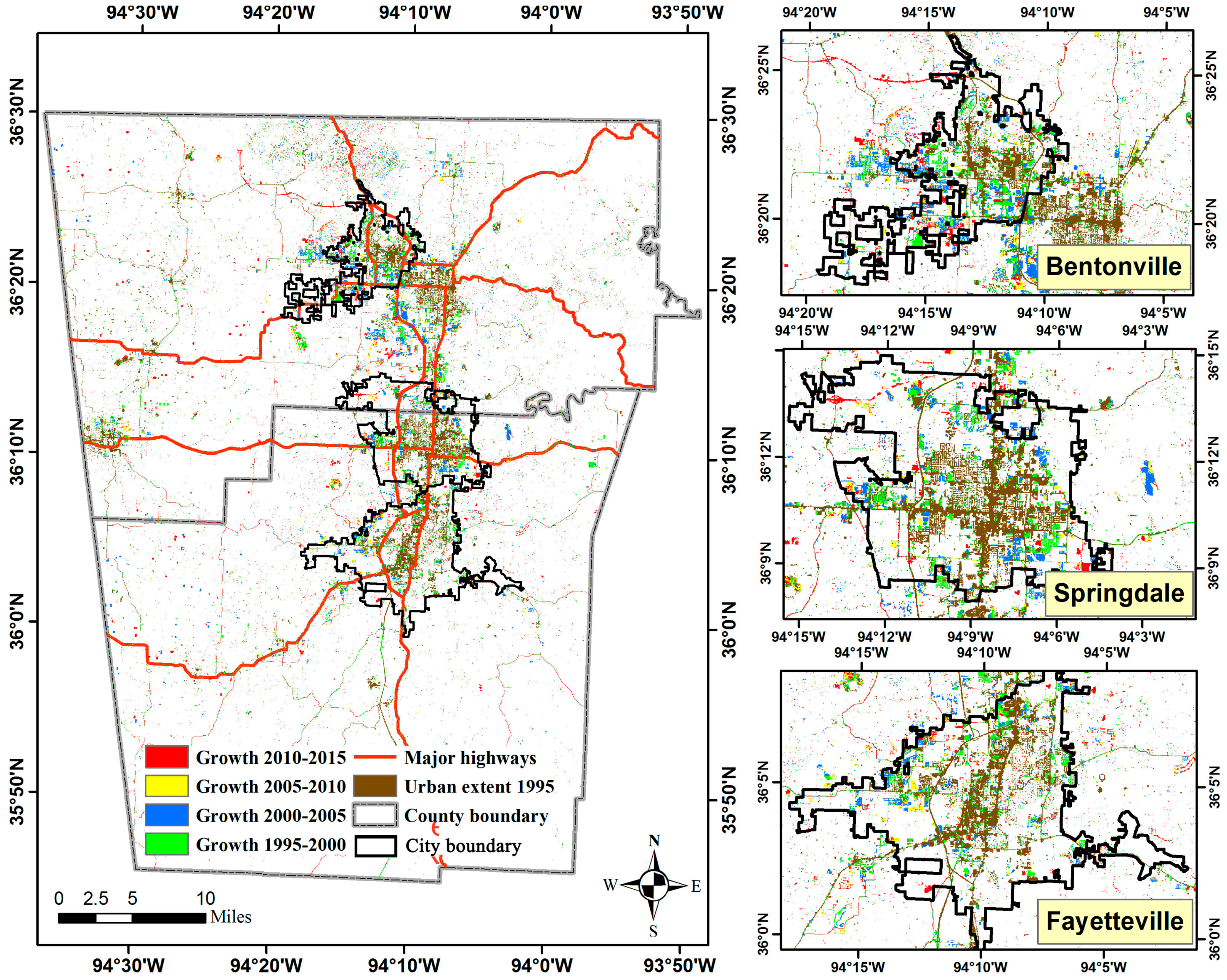
3.2. Urban Expansion in Northwestern Arkansas (NWA)
4. Discussion
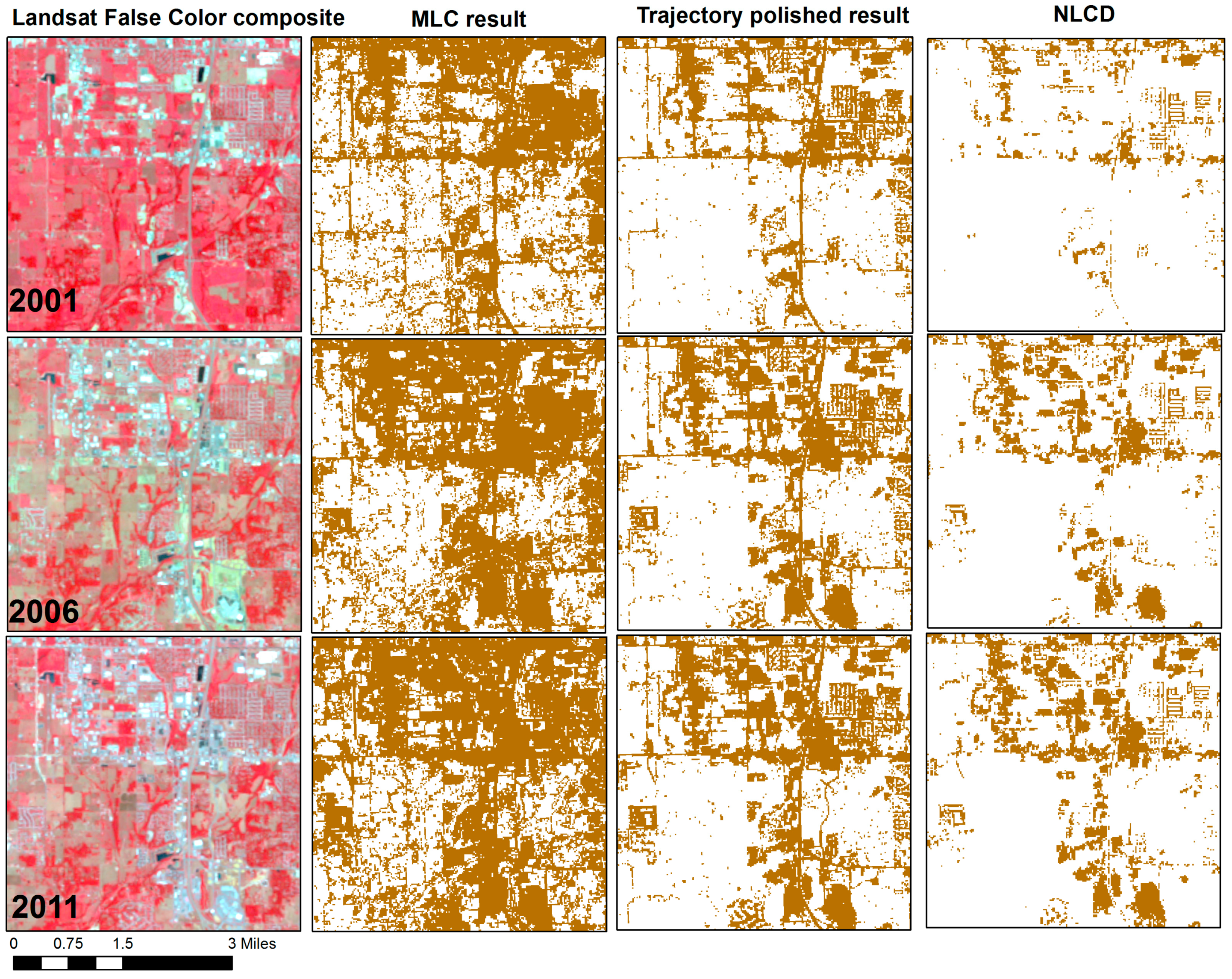
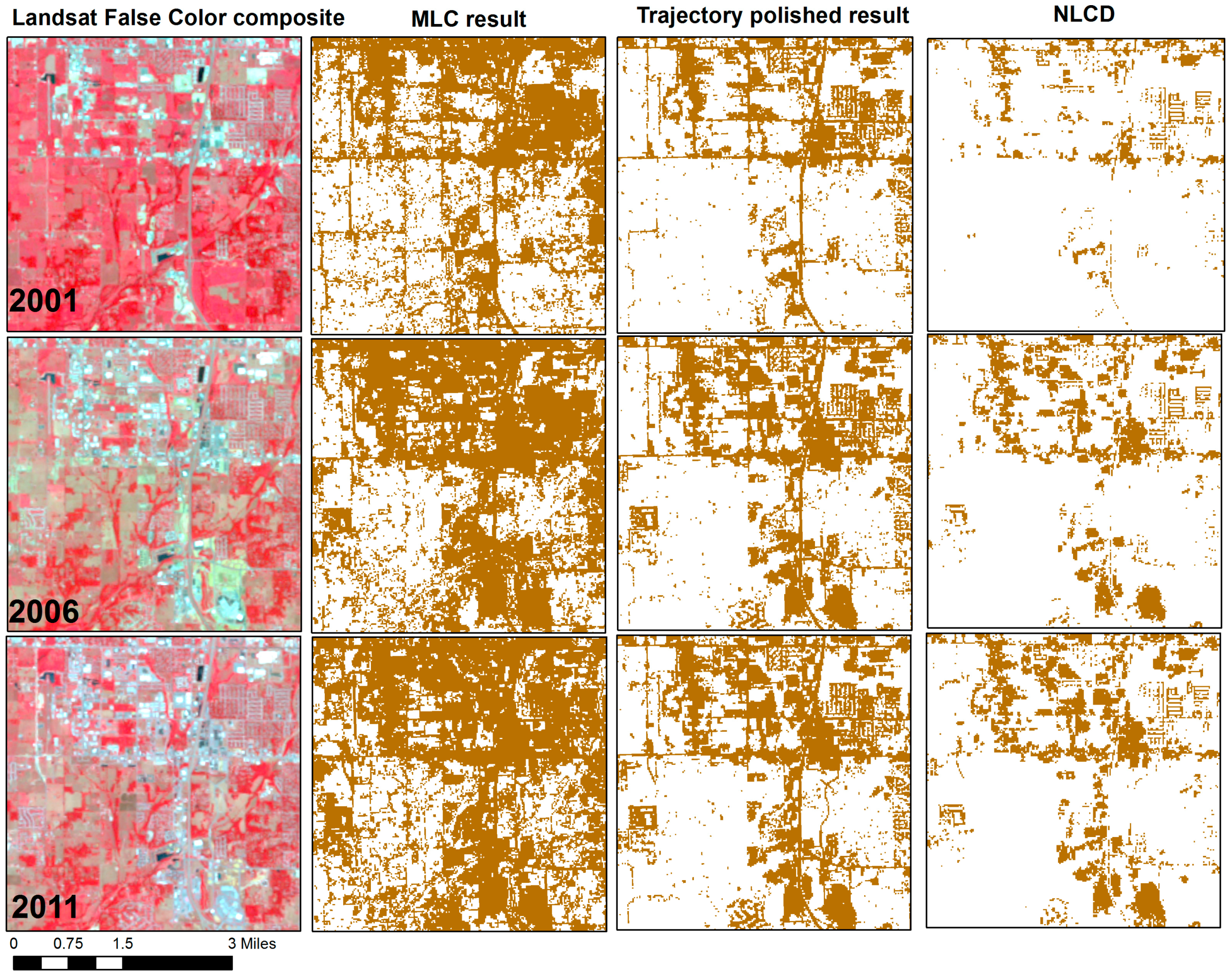
4.1. Pros and Cons of the Temporal Trajectory Polishing Algorithm
4.2. Socio-Economic and Environmental Explanations of the Urban Sprawling Patten in NWA
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- United Nations, Department of Economic and Social Affairs, Population Division. World Urbanization Prospects: The 2014 Revision; The United Nations: New York, NY, USA, 2014. [Google Scholar]
- Goudie, A. The Human Impact on the Natural Environment: Past, Present, and Future, 7th ed.; Wiley-Blackwell: New Jersey, NJ, USA, 2013. [Google Scholar]
- Liang, L.; Xu, B.; Chen, Y.; Liu, Y.; Cao, W.; Fang, L.; Goodchild, M.F.; Gong, P. Combining spatial-temporal and phylogenetic analysis approaches for improved understanding on global H5N1 transmission. PLoS ONE 2010, 5, e13575. [Google Scholar] [CrossRef] [PubMed]
- Schneider, A. Monitoring land cover change in urban and peri-urban areas using dense time stacks of Landsat satellite data and a data mining approach. Remote Sens. Environ. 2012, 124, 689–704. [Google Scholar] [CrossRef]
- Yeh, C.T.; Huang, S.L. Global urbanization and demand for natural resources. In Carbon Sequestration in Urban Ecosystems; Springer: Amsterdam, The Netherlands, 2011; pp. 355–371. [Google Scholar]
- Weng, Q. Remote sensing of impervious surfaces in the urban areas: Requirements, methods, and trends. Remote Sens. Environ. 2012, 117, 34–39. [Google Scholar] [CrossRef]
- Martinuzzi, S.; Withey, J.C.; Pidgeon, A.M.; Platinga, A.J.; McKerrow, A.A.; Williams, S.G.; Helmers, D.P.; Radeloff, V.C. Future land-use scenarios and the loss of wildlife habitat in the southeastern U.S. Ecol. Appl. 2015, 25, 160–171. [Google Scholar] [CrossRef] [PubMed]
- Mather, A.; Hancox, D.; Riginos, C. Urban development explains reduced genetic diversity in a narrow range endemic freshwater fish. Conserv. Genet. 2015, 16, 625–634. [Google Scholar] [CrossRef]
- Seto, K.C.; Satterthwaite, D. Interactions between urbanization and global environmental change. Curr. Opin. Environ. Sustain. 2010, 2, 127–128. [Google Scholar] [CrossRef]
- Lemonsu, A.; Viguie, V.; Daniel, M.; Masson, V. Vulnerability to heat waves: Impact of urban expansion scenarios on urban heat island and heat stress in Paris (France). Urban Clim. 2015, 14, 586–605. [Google Scholar] [CrossRef]
- Grimm, N.B.; Faeth, S.H.; Golubiewski, N.E.; Redman, C.L.; Wu, J.; Bai, X.; Briggs, J.M. Global Change and the Ecology of Cities. Science 2008, 319, 756–760. [Google Scholar] [CrossRef] [PubMed]
- Strano, E.; Nicosia, V.; Latora, V.; Porta, S.; Barthélemy, M. Elementary processes governing the evolution of road networks. Sci. Rep. 2012, 2, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Cai, S. A Spatial-Temporal Modeling Approach to Reconstructing Land-Cover Change Trajectories from Multi-temporal Satellite Imagery. Ann. Assoc. Am. Geogr. 2012, 102, 1329–1347. [Google Scholar] [CrossRef]
- Schneider, A.; Friedl, M.A.; Potere, D. A new map of global urban extent from MODIS satellite data. Environ. Res. Lett. 2009, 4, 044003. [Google Scholar] [CrossRef]
- Xian, G.; Homer, C.; Dewitz, J.; Fry, J.; Hossain, N.; Wickham, J. Change of impervious surface area between 2001 and 2006 in the conterminous United States. Photogramm. Eng. Remote Sens. 2011, 77, 758–762. [Google Scholar]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Niu, Z.; Huang, X.; Fu, H.; Liu, S.; et al. Finer resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef]
- Homer, C.H.; Fry, J.A.; Barnes, C.A. The National Land Cover Database. U.S. Geol. Surv. Fact Sheet 2012, 3020, 1–4. [Google Scholar]
- Kennedy, R.E.; Yang, Z.; Cohen, W.B. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. LandTrendr—Temporal segmentation algorithms. Remote Sens. Environ. 2010, 114, 2897–2910. [Google Scholar] [CrossRef]
- Sulla-Menashe, D.; Kennedy, R.E.; Yang, Z.; Braaten, J.; Krankina, O.N.; Friedl, M.A. Detecting forest disturbance in the Pacific Northwest from MODIS time series using temporal segmentation. Remote Sens. Environ. 2014, 151, 114–123. [Google Scholar] [CrossRef]
- Liang, L.; Hawbaker, T.J.; Zhu, Z.; Li, X.; Gong, P. Forest disturbance interactions and successional pathways in the Southern Rocky Mountains. For. Ecol. Manag. 2016, 375, 35–45. [Google Scholar] [CrossRef]
- Coppin, P.; Jonckheere, I.; Nackaerts, K.; Muys, B.; Lambin, E. Digital change detection methods in ecosystem monitoring: A review. Int. J. Remote Sens. 2004, 25, 1565–1596. [Google Scholar] [CrossRef]
- Gill, T. Fayetteville is the Fastest Growing City in Arkansas, Census Estimate Says. Available online: https://www.fayettevilleflyer.com/2015/05/28/fayetteville-is-the-fastest-growing-city-in-arkansas-census-estimate-says/ (accessed on 14 December 2016).
- Li, X.; Gong, P.; Liang, L. A 30-year (1984–2013) record of annual urban dynamics of Beijing City derived from Landsat data. Remote Sens. Environ. 2015, 166, 78–90. [Google Scholar] [CrossRef]
- IHS Global Insight USA Inc. U.S. Metro Economies. The Council on Metro Economies and the New American City; IHS Global Insight USA Inc.: Lexington, KY, USA, 2014; Available online: http://usmayors.org/metroeconomies/2014/06/report.pdf (accessed on 11 January 2017).
- Matlock, M.; Kruger, K.; Cummings, E.; Sandefur, H.; Foster, S.; Clayton-Niederman, Z. City of Fayetteville Urban Stream Assessment Final Report 2004–2007; Center for Agricultural and Rural Sustainability, University of Arkansas Division of Agriculture: Fayetteville, AR, USA, 2008; p. 97. [Google Scholar]
- Wal-mart Stores, Inc. Walmart 2014 Annual Report. Available online: http://cdn.corporate.walmart.com/66/e5/9ff9a87445949173fde56316ac5f/2014- annual-report.pdf (accessed on 11 January 2017).
- Tyson Foods, Inc. Tyson Completes Record Year as Fourth Quarter Earnings Increased 23% to $0.70; Poised for Strong Growth in 2014; Tyson Foods, Inc.: Springdale, AR, USA; Available online: http://s1.q4cdn.com/900108309/files/doc_news/TSN-Q413-Earnings_Final.pdf (accessed on 11 January 2017).
- Souza, K. 2014 Income Up Almost 10% for J.B. Hunt, Revenue Hits $6.16 Billion (Updated). Available online: http://talkbusiness.net/2015/01/2014-income-up-almost-10-for-j-b-hunt-revenuehits-6-16-billion-updated/ (accessed on 22 January 2015).
- Voorhies, S. U of A Ranked as Seventh-Fastest-Growing Public Research University; University of Arkansas News: Fayetteville, AR, USA, 2014. [Google Scholar]
- Masek, J.G.; Vermote, E.F.; Saleous, N.E.; Wolfe, R.; Hall, F.G.; Huemmrich, K.F.; Gao, F.; Kutler, J.; Lim, T.K. A Landsat surface reflectance dataset for North America, 1990–2000. IEEE Geosci. Remote Sens. Lett. 2006, 3, 68–72. [Google Scholar] [CrossRef]
- Adler-Golden, S.M.; Matthew, M.W.; Bernstein, L.S.; Levine, R.Y.; Berk, A.; Richtsmeier, S.C.; Acharya, P.K.; Anderson, G.P.; Felde, J.W.; Gardner, J.A.; et al. Atmospheric correction for shortwave spectral imagery based on MODTRAN4. In Proceeding of the SPIE’s International Symposium on Optical Science, Engineering, and Instrumentation, Denver, CO, USA, 27 October 1999.
- Rouse, J., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Zha, Y.; Gao, J.; Ni, S. Use of normalized difference built-up index in automatically mapping urban areas from TM imagery. Int. J. Remote Sens. 2003, 24, 583–594. [Google Scholar] [CrossRef]
- Crist, E.P.; Kauth, R.J. The Tasseled Cap De-Mystified. Photogramm. Eng. Remote Sens. 1986, 52, 81–86. [Google Scholar]
- Baig, M.H.A.; Zhang, L.; Shuai, T.; Tong, Q. Derivation of a tasseled cap transformation based on Landsat 8 at-satellite reflectance. Remote Sens. Lett. 2014, 5, 423–431. [Google Scholar] [CrossRef]
- Homer, C.; Dewitz, J.; Fry, J.; Wickham, J.D. Completion of the 2001 National LandCover Database for the Conterminous United States. Photogramm. Eng. Remote Sens. 2007, 73, 337–341. [Google Scholar]
- MRLC 2014. Multi-Resolution Land Characteristics National Land Cover Database. Available online: http://www.mrlc.gov/index.php (accessed on 14 December 2016).
- USDA Geospatial Data Gateway. Available online: https://gdg.sc.egov.usda.gov/ (accessed on 11 Jan 2017).
- Van Niel, T.G.; McVicar, T.R.; Datt, B. On the relationship between training sample size and data dimensionality: Monte Carlo analysis of broadband multi-temporal classification. Remote Sens. Environ. 2005, 98, 468–480. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Dietterich, T.G. An Experimental Comparison of Three Methods for Constructing Ensembles of Decision Trees: Bagging, Boosting and Randomization. Mach. Learn. 2000, 40, 139–157. [Google Scholar] [CrossRef]
- Mena, C.F. Trajectories of Land-use and Land-cover in the Northern Ecuadorian Amazon: Temporal Composition, Spatial Configuration, and Probability of Change. Photogramm. Eng. Remote Sens. 2008, 74, 737–751. [Google Scholar] [CrossRef]
- Fitzpatrick-Lins, K. Comparison of sampling procedures and data analysis for a land-use and land-cover map. Photogramm. Eng. Remote Sens. 1981, 47, 343–351. [Google Scholar]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; CRC Press: Florida, FL, USA, 2008. [Google Scholar]
- Stehman, S.V. Selecting and interpreting measures of thematic classification accuracy. Remote Sens. Environ. 1997, 62, 77–89. [Google Scholar] [CrossRef]
- Wickham, J.D.; Stehman, S.V.; Gass, L.; Dewitz, J.; Fry, J.; Wade, T.G. Accuracy assessment of NLCD 2006 land cover and impervious surface. Remote Sens. Environ. 2013, 130, 294–304. [Google Scholar] [CrossRef]
- Homer, C.; Dewitz, J.; Yang, L.; Jin, S.; Danielson, P.; Xian, G.; Coulston, J.; Herold, N.; Wickham, J.; Megown, K. Completion of the 2011 National Land Cover Database for the Conterminous United States—Representing a Decade of Land Cover Change Information. Photogramm. Eng. Remote Sens. 2015, 81, 345–354. [Google Scholar]
- Small, C.; Lu, J.W. Estimation and vicarious validation of urban vegetation abundance by spectral mixture analysis. Remote Sens. Environ. 2006, 100, 441–456. [Google Scholar] [CrossRef]
- Friedl, M.A.; Brodley, C.E. Decision tree classification of land cover from remotely sensed data. Remote Sens. Environ. 1997, 61, 399–409. [Google Scholar] [CrossRef]
- Ghimire, B.; Rogan, J.; Miller, J. Contextual land-cover classification: Incorporating spatial dependence in land-cover classification models using random forests and the getis statistic. Remote Sens. Lett. 2010, 1, 45–54. [Google Scholar] [CrossRef]
- Jia, K.; Wei, X.; Gu, X.; Yao, Y.; Xie, X.; Li, B. Land cover classification using Landsat 8 operational land imager data in Beijing, China. Geocarto Int. 2014, 29, 941–951. [Google Scholar] [CrossRef]
- Pahlevan, N.; Schott, J.R. Leveraging EO-1 to evaluate capability of new generation of Landsat sensors for coastal/inland water studies. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 360–374. [Google Scholar] [CrossRef]
- Irons, J.R.; Dwyer, J.L.; Barsi, J.A. The next Landsat satellite: The Landsat data continuity mission. Remote Sens. Environ. 2012, 122, 11–21. [Google Scholar] [CrossRef]
- Northwest Arkansas Regional Planning Commission. Northwest Arkansas 2040 Metropolitan Transportation Plan. Available online: http://nwarpc.org/transportation/metropolitan-transportation-plan/ (accessed on 14 December 2016).
- Gascon, C.S.; Varley, M.A. Metro Profile: A Tale of Four Cities: Widespread Growth in Northwest Arkansas. Available online: https://www.stlouisfed.org/publications/regional-economist/january-2015/metro-profile (accessed on 14 December 2016).
- Briggs, D.J.; de Hoogh, C.; Gulliver, J.; Wills, J.; Elliott, P.; Kingham, S.; Smallbone, K. A regression-based method for mapping traffic-related air pollution: Application and testing in four contrasting urban environments. Sci. Total Environ. 2000, 253, 151–167. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Date | Sensor | Cloud Cover | |
|---|---|---|---|---|
| 1 | 1995 | 23 August | L5-TM | 0.00% |
| 2 | 1996 | 2 March | L5-TM | 0.00% |
| 3 | 1997 | 28 August | L5-TM | 0.00% |
| 4 | 1998 | 24 March | L5-TM | 0.00% |
| 5 | 1999 | 18 August | L5-TM | 0.00% |
| 6 | 2000 | 4 August | L5-TM | 0.00% |
| 7 | 2001 | 22 July | L5-TM | 0.00% |
| 8 | 2002 | 11 September | L5-TM | 0.00% |
| 9 | 2003 | 16 October | L5-TM | 0.00% |
| 10 | 2004 | 2 October | L5-TM | 0.00% |
| 11 | 2005 | 19 September | L5-TM | 0.00% |
| 12 | 2006 | 5 August | L5-TM | 0.00% |
| 13 | 2007 | 20 May | L5-TM | 0.00% |
| 14 | 2008 | 27 September | L5-TM | 0.00% |
| 15 | 2009 | 7 April | L5-TM | 0.00% |
| 16 | 2010 | 31 July | L5-TM | 0.00% |
| 17 | 2011 | 3 August | L5-TM | 0.00% |
| 18 | 2013 | 9 September | L8-OLI | 0.03% |
| 19 | 2014 | 20 March | L8-OLI | 0.05% |
| 20 | 2015 | 14 August | L8-OLI | 0.25% |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reynolds, R.; Liang, L.; Li, X.; Dennis, J. Monitoring Annual Urban Changes in a Rapidly Growing Portion of Northwest Arkansas with a 20-Year Landsat Record. Remote Sens. 2017, 9, 71. https://doi.org/10.3390/rs9010071
Reynolds R, Liang L, Li X, Dennis J. Monitoring Annual Urban Changes in a Rapidly Growing Portion of Northwest Arkansas with a 20-Year Landsat Record. Remote Sensing. 2017; 9(1):71. https://doi.org/10.3390/rs9010071
Chicago/Turabian StyleReynolds, Ryan, Lu Liang, XueCao Li, and John Dennis. 2017. "Monitoring Annual Urban Changes in a Rapidly Growing Portion of Northwest Arkansas with a 20-Year Landsat Record" Remote Sensing 9, no. 1: 71. https://doi.org/10.3390/rs9010071
APA StyleReynolds, R., Liang, L., Li, X., & Dennis, J. (2017). Monitoring Annual Urban Changes in a Rapidly Growing Portion of Northwest Arkansas with a 20-Year Landsat Record. Remote Sensing, 9(1), 71. https://doi.org/10.3390/rs9010071