
Compact Polarimetric SAR Ship Detection with m-δ Decomposition Using Visual Attention Model


Abstract
:
1. Introduction
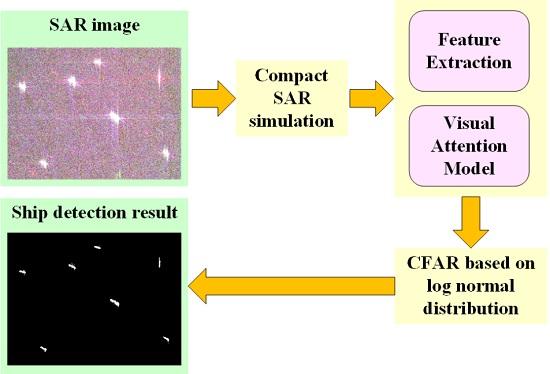
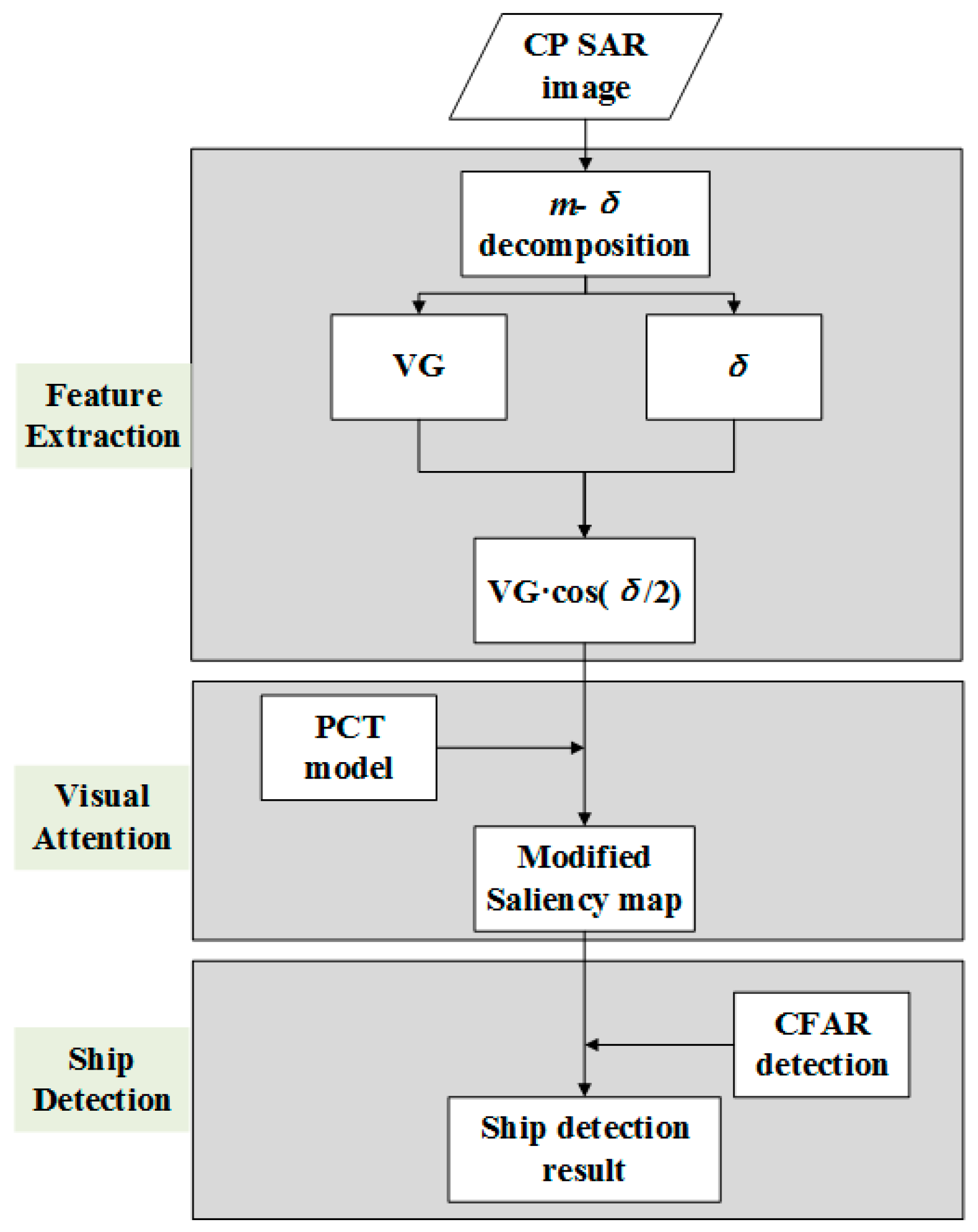
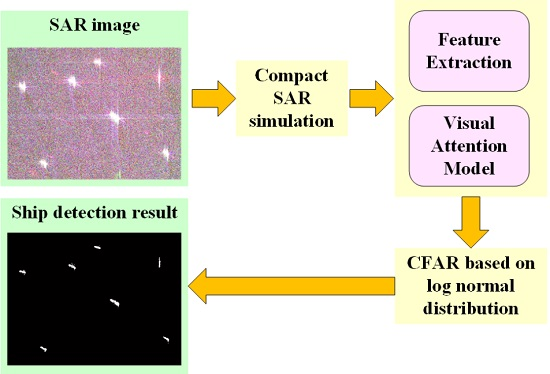
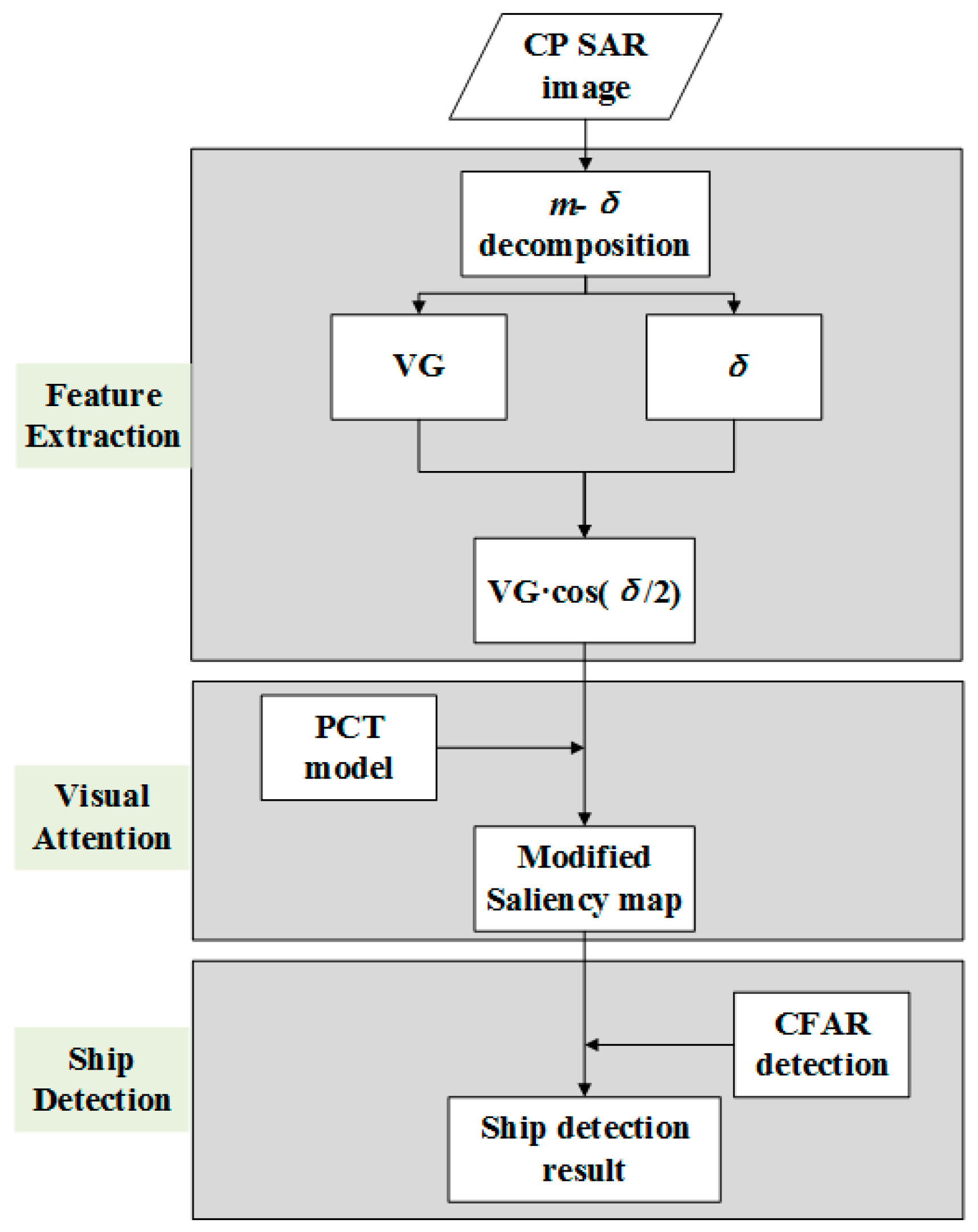
2. Methodology
2.1. Evaluation of Polarimetric Scattering Features for Ship Detection
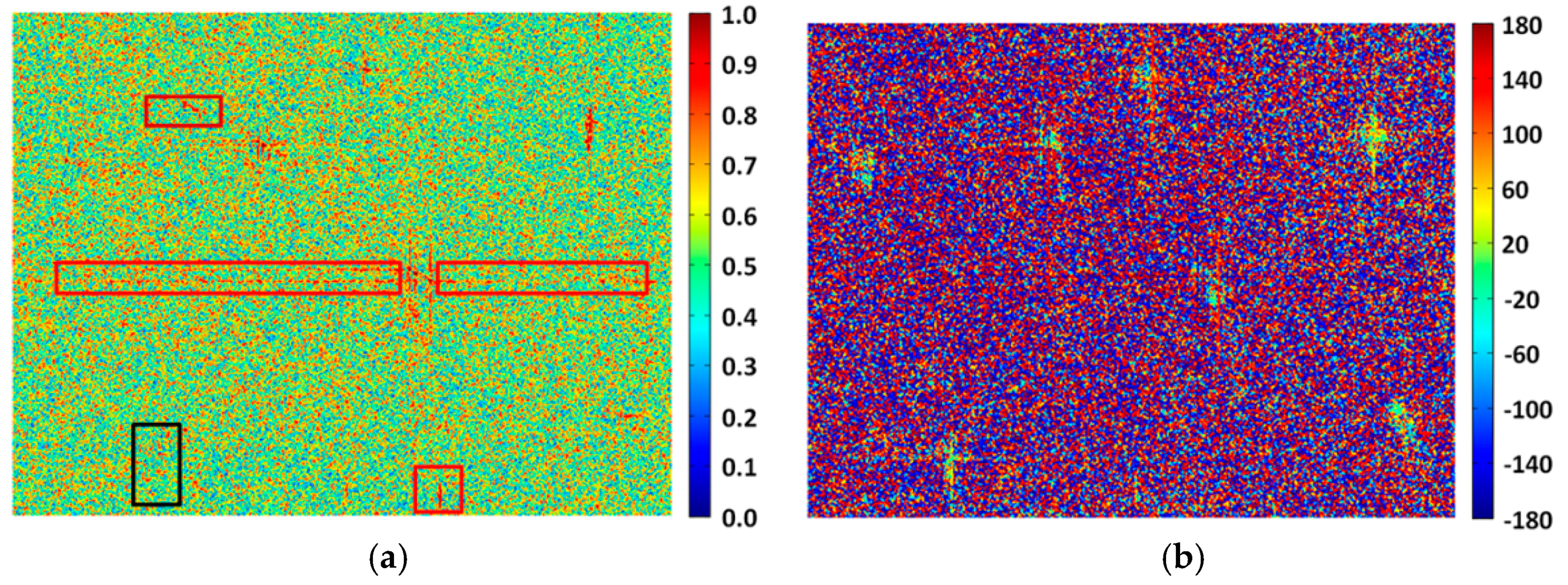
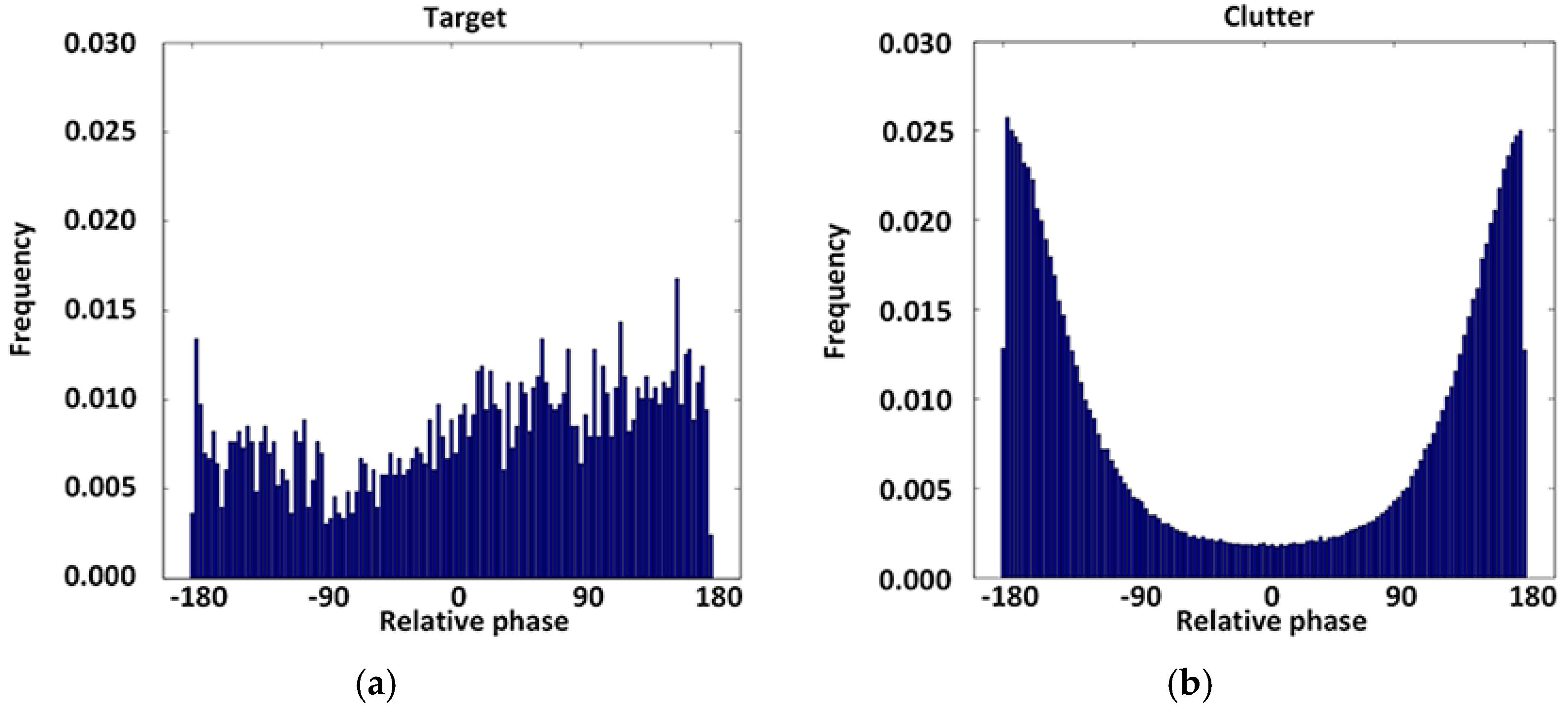
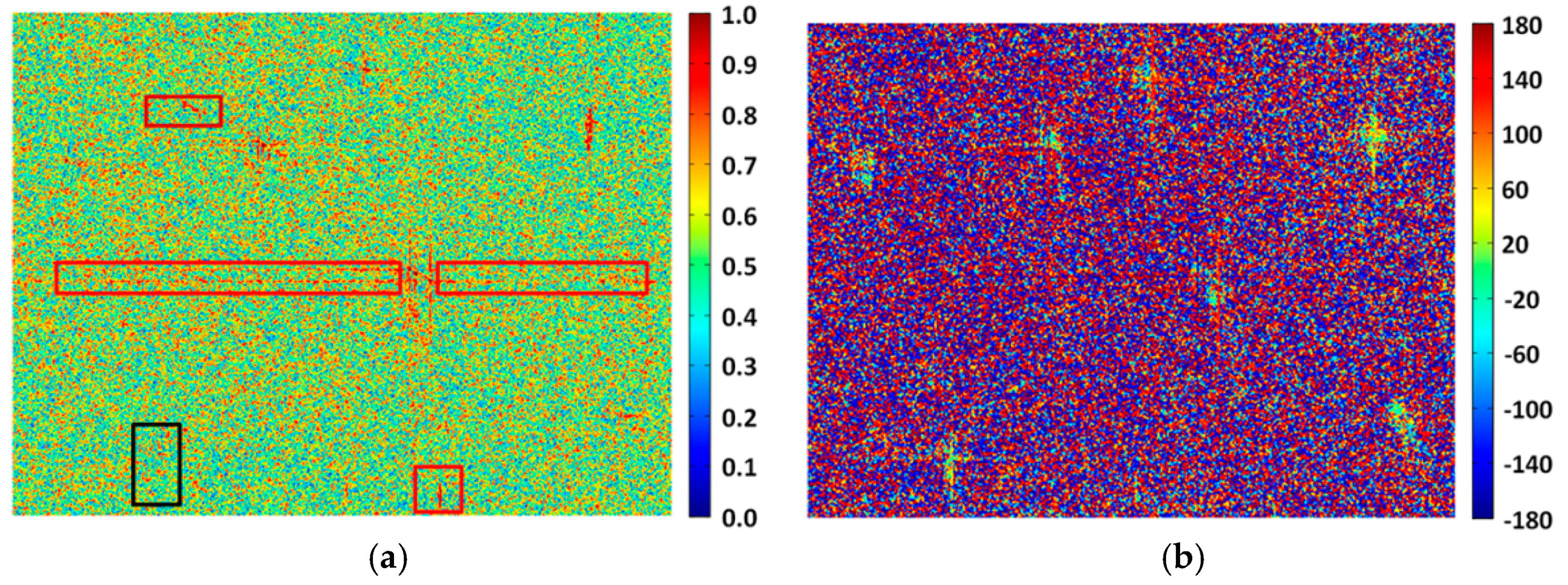
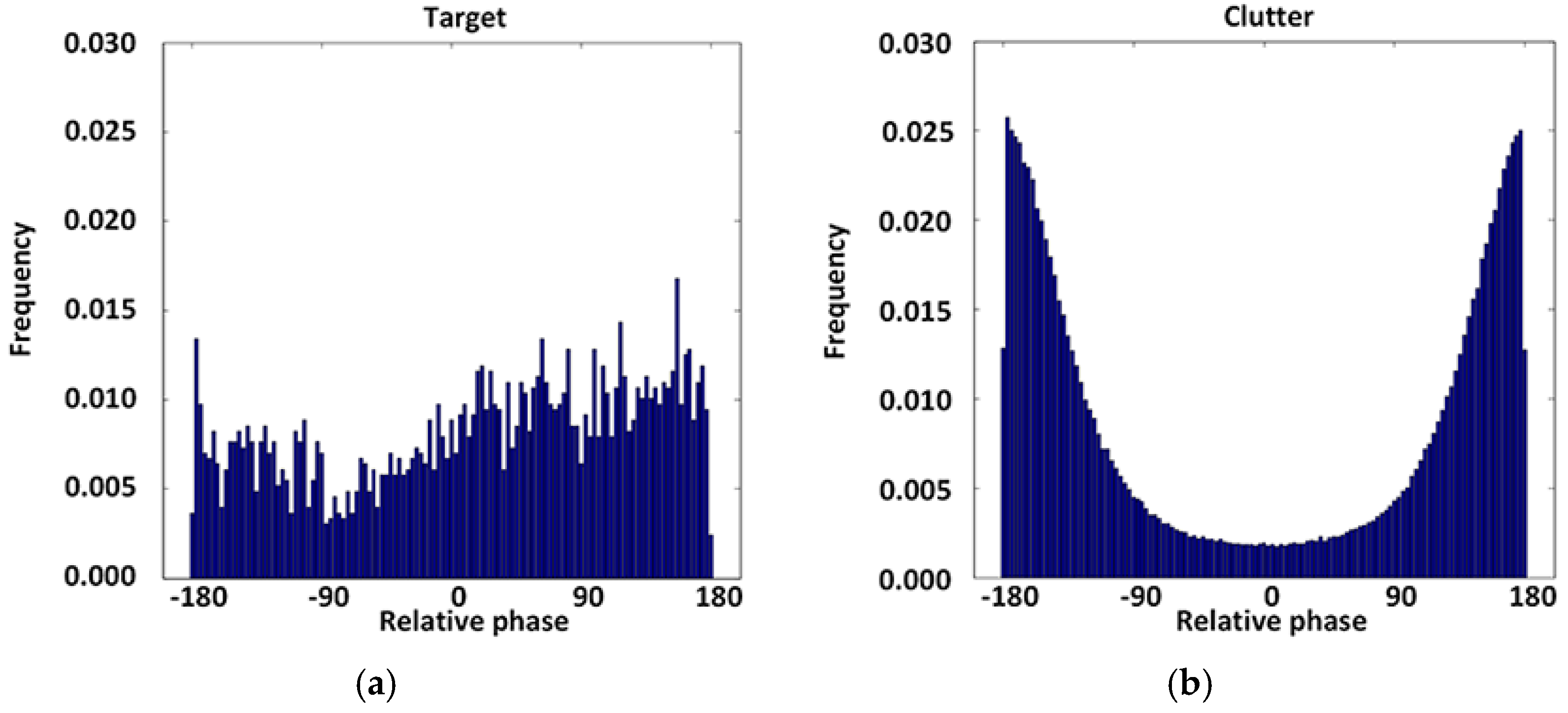
2.1.1. Degree of Polarization and Relative Phase
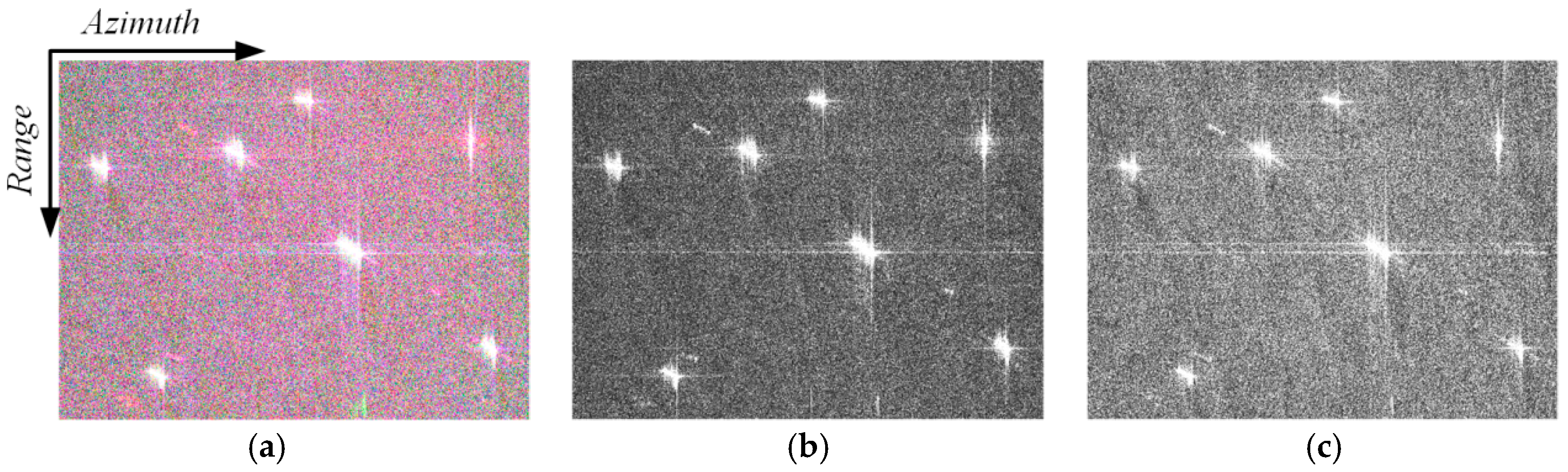
2.1.2. Three-Component Decomposition
2.2. The Calculation of the Saliency Map
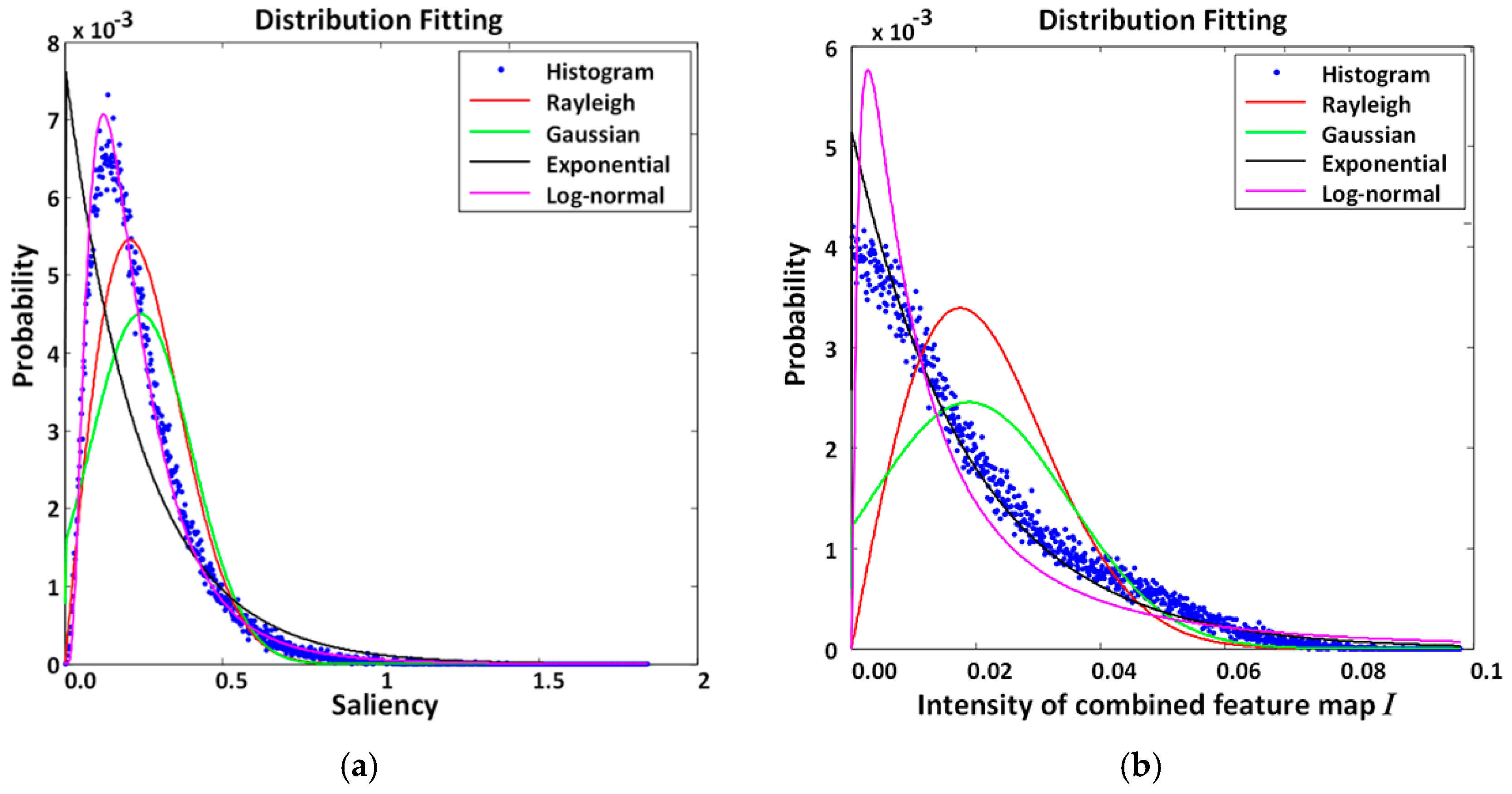
2.3. Distribution of MS Image
2.4. The Advantages of Applying Visual Attention Model
3. Experiment Results and Discussion
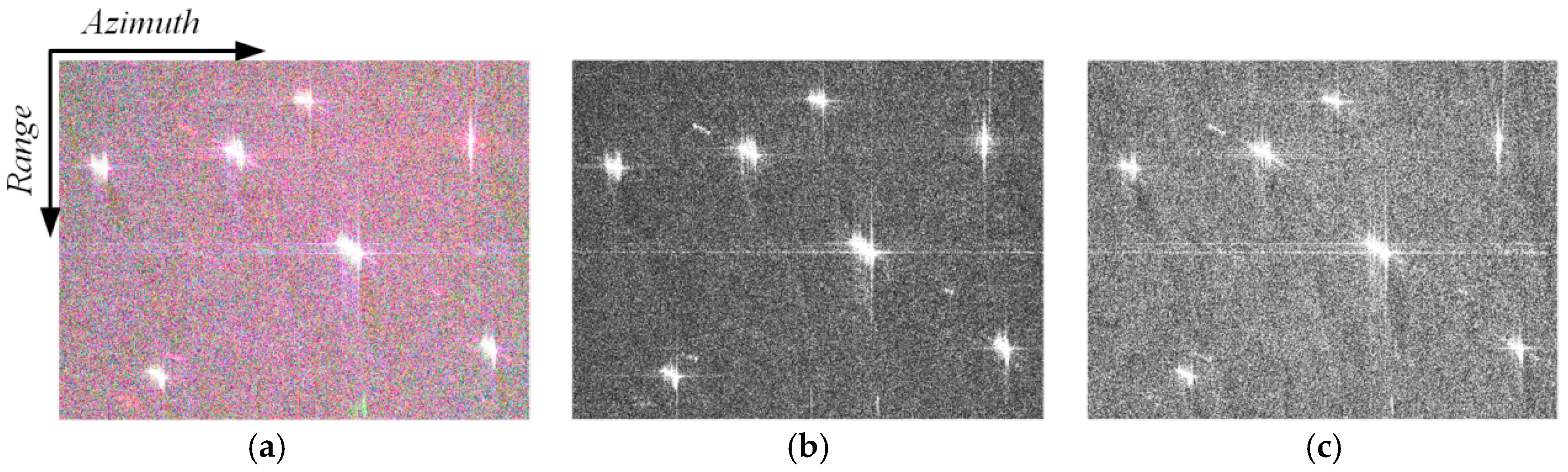
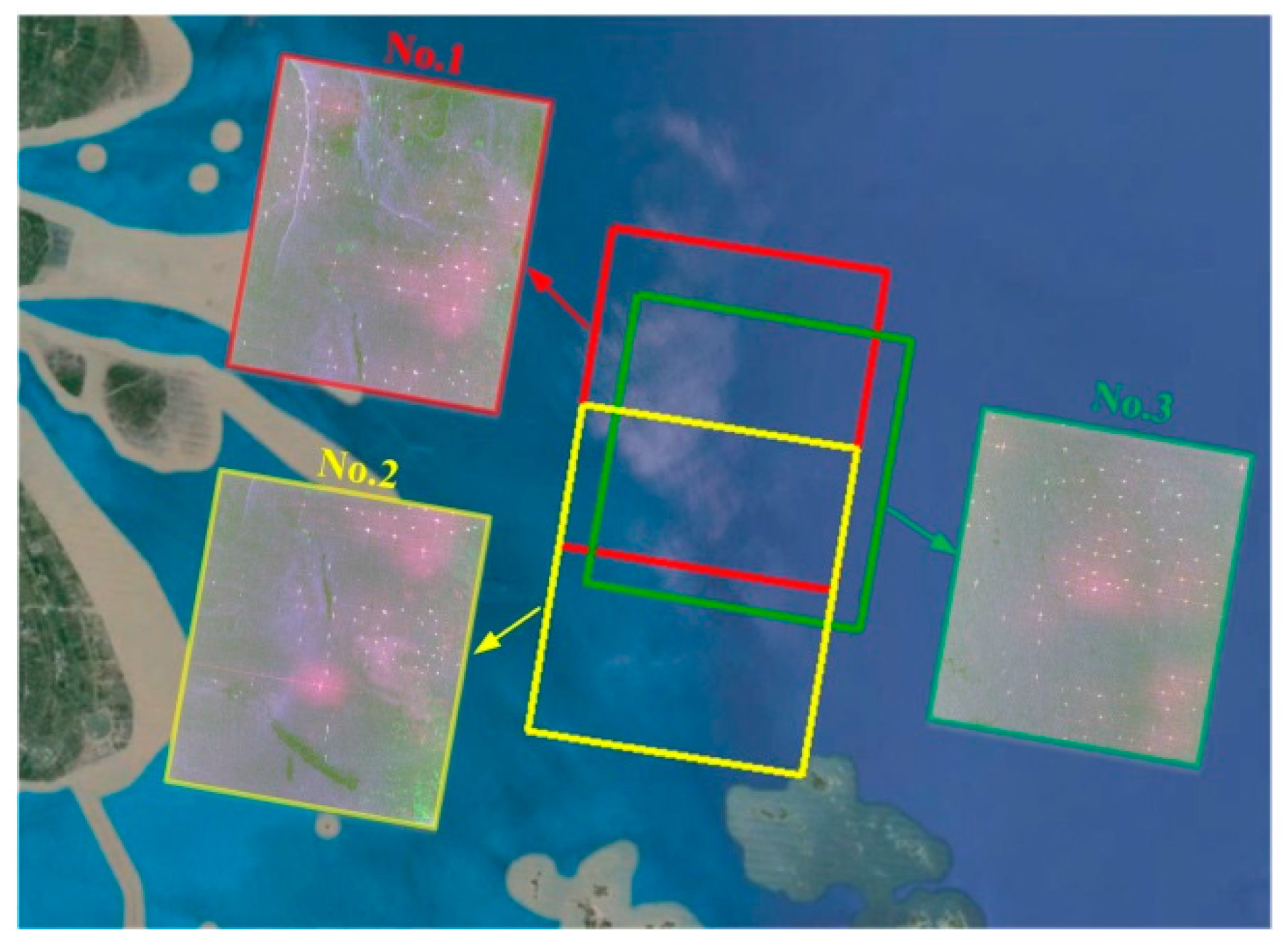
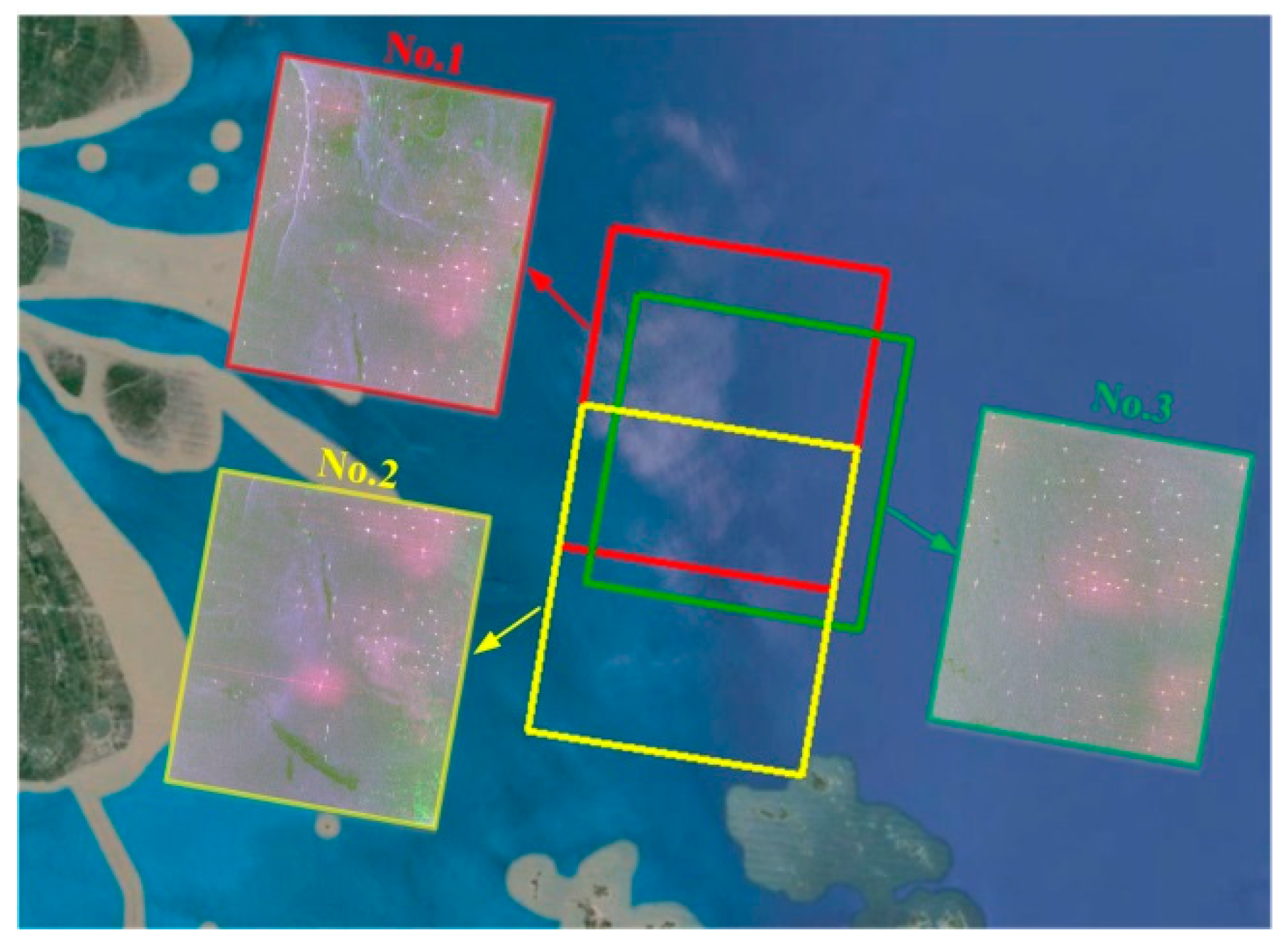
3.1. Data Introduction
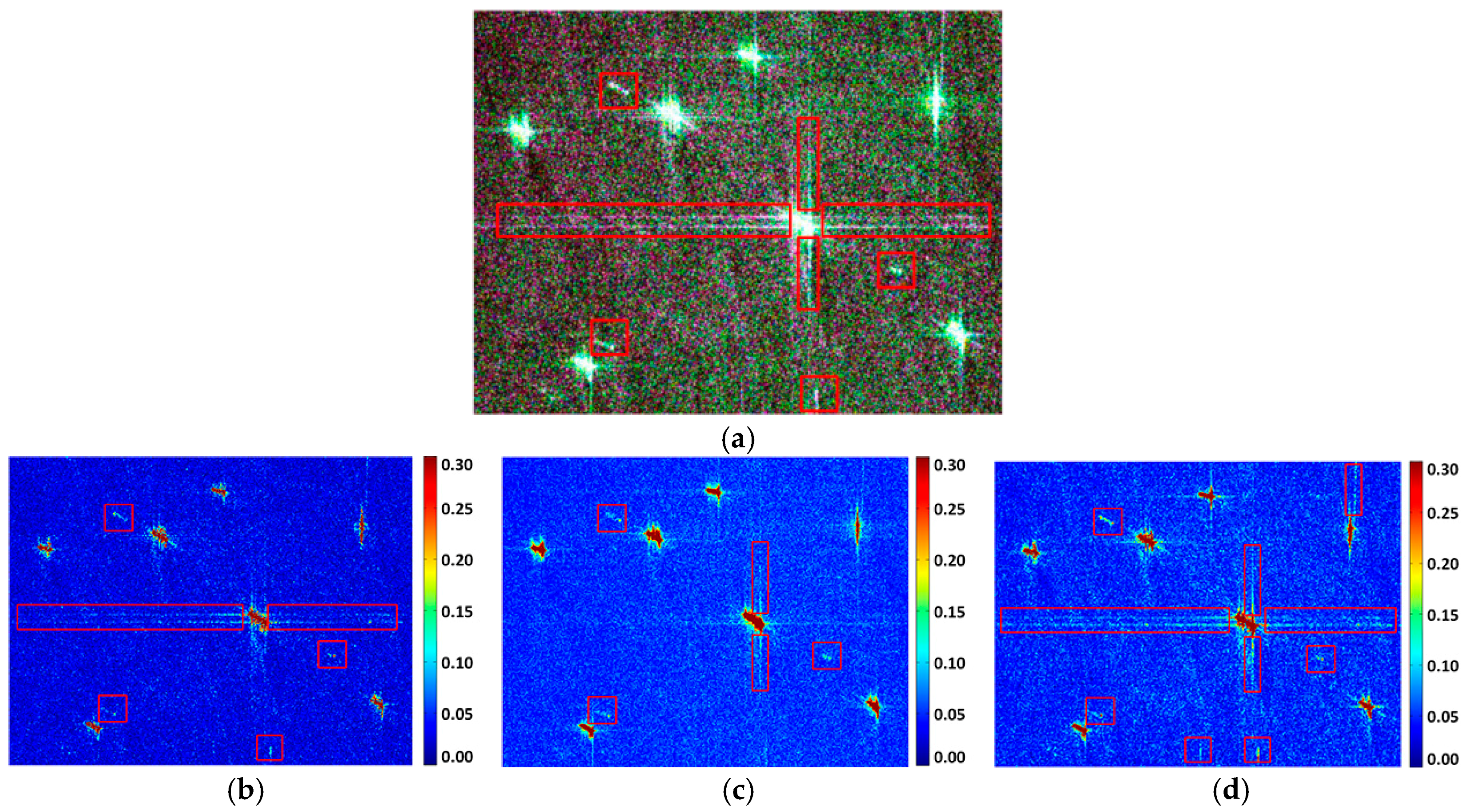
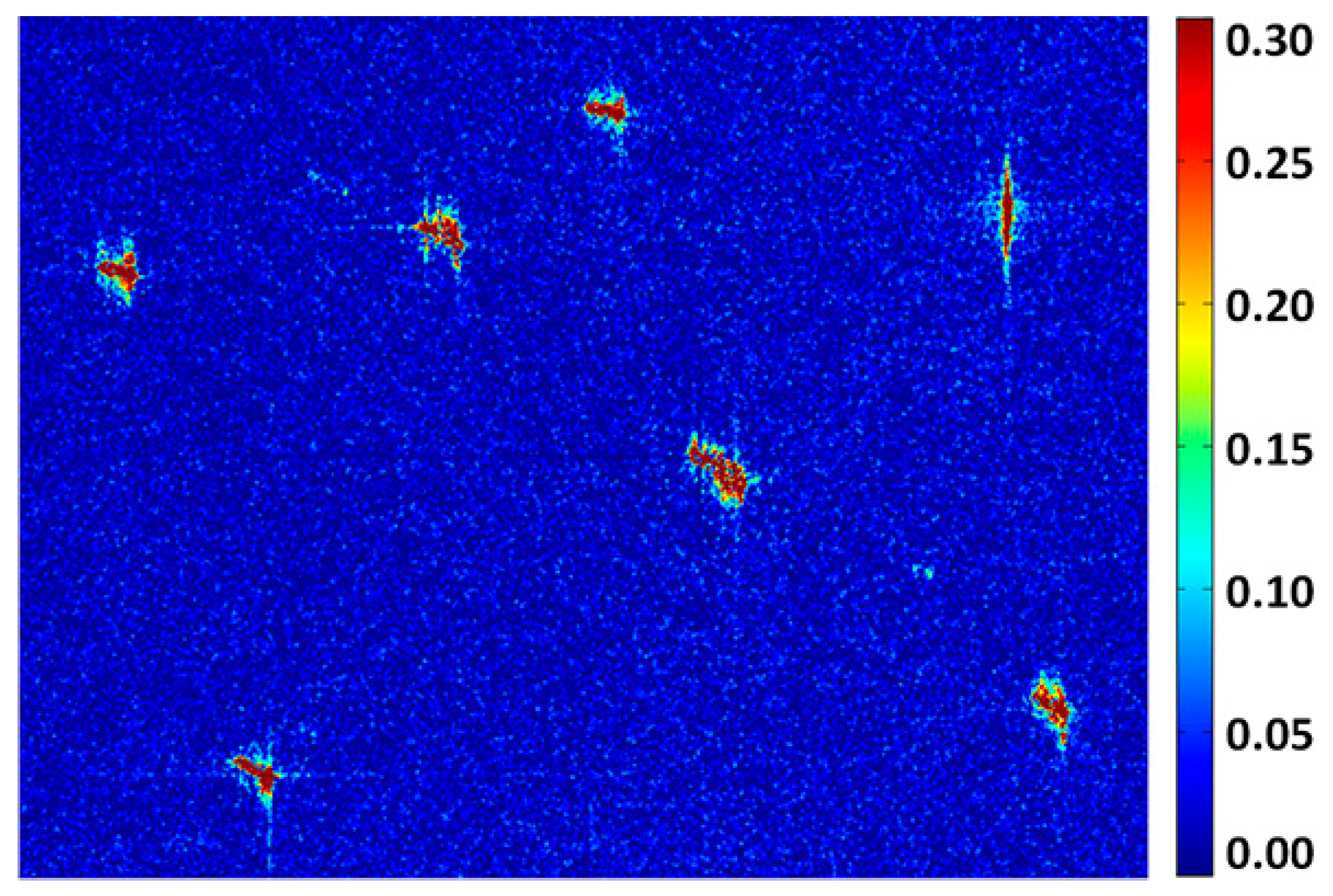
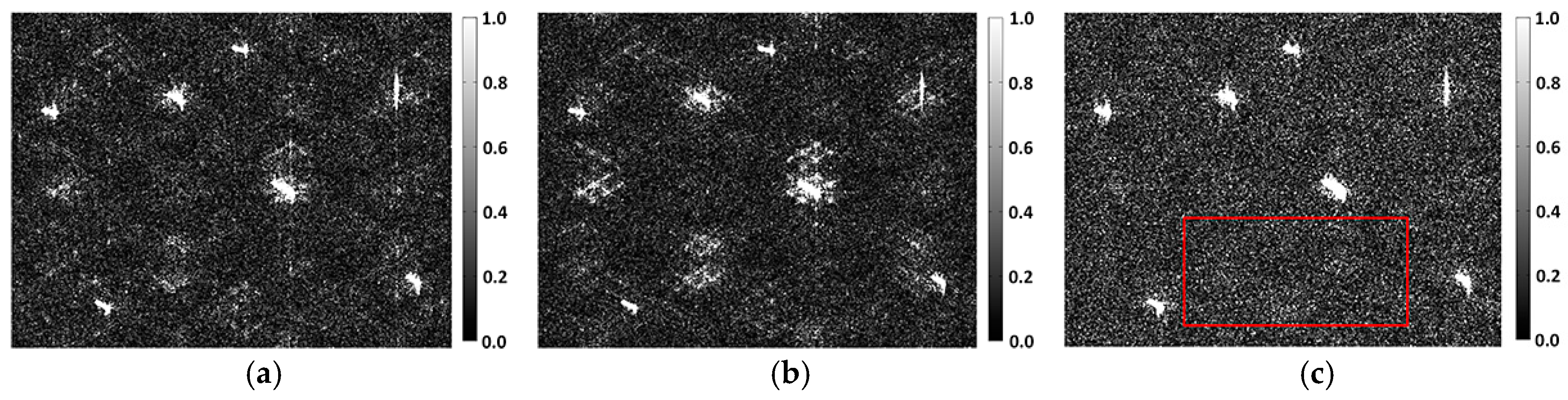
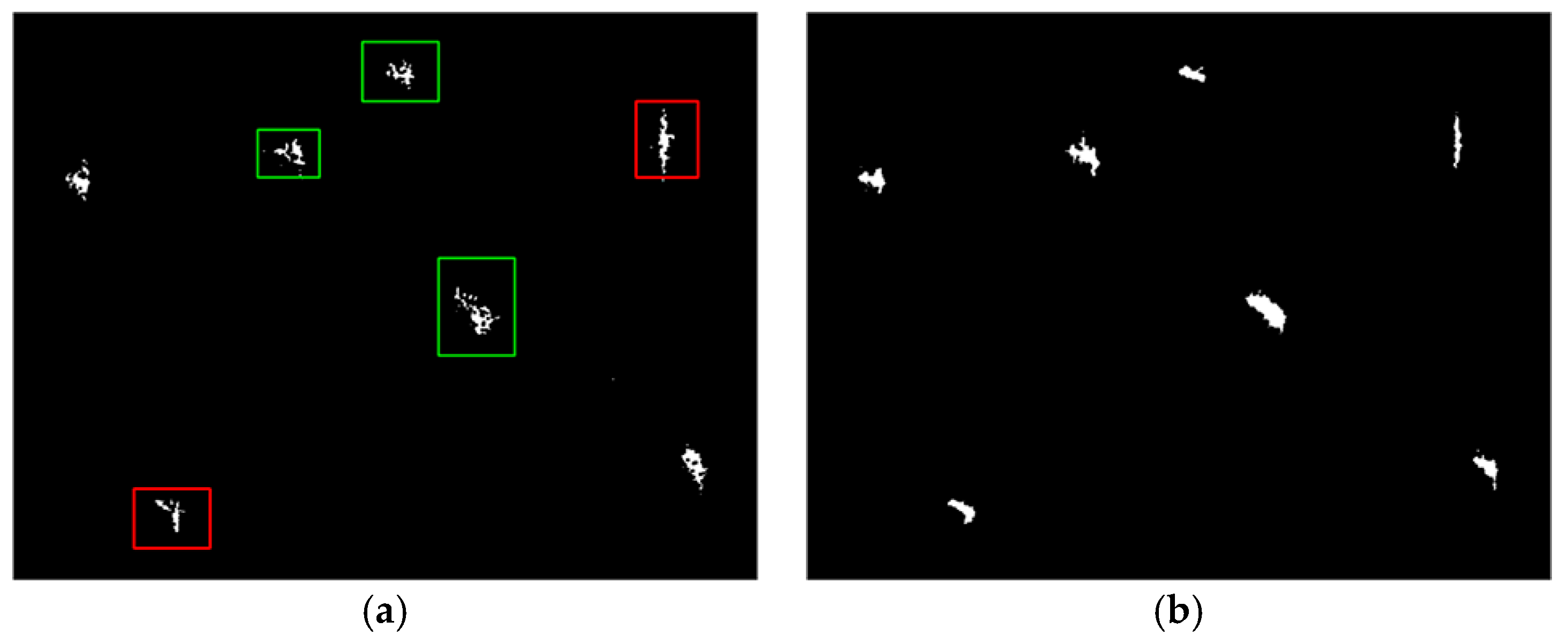
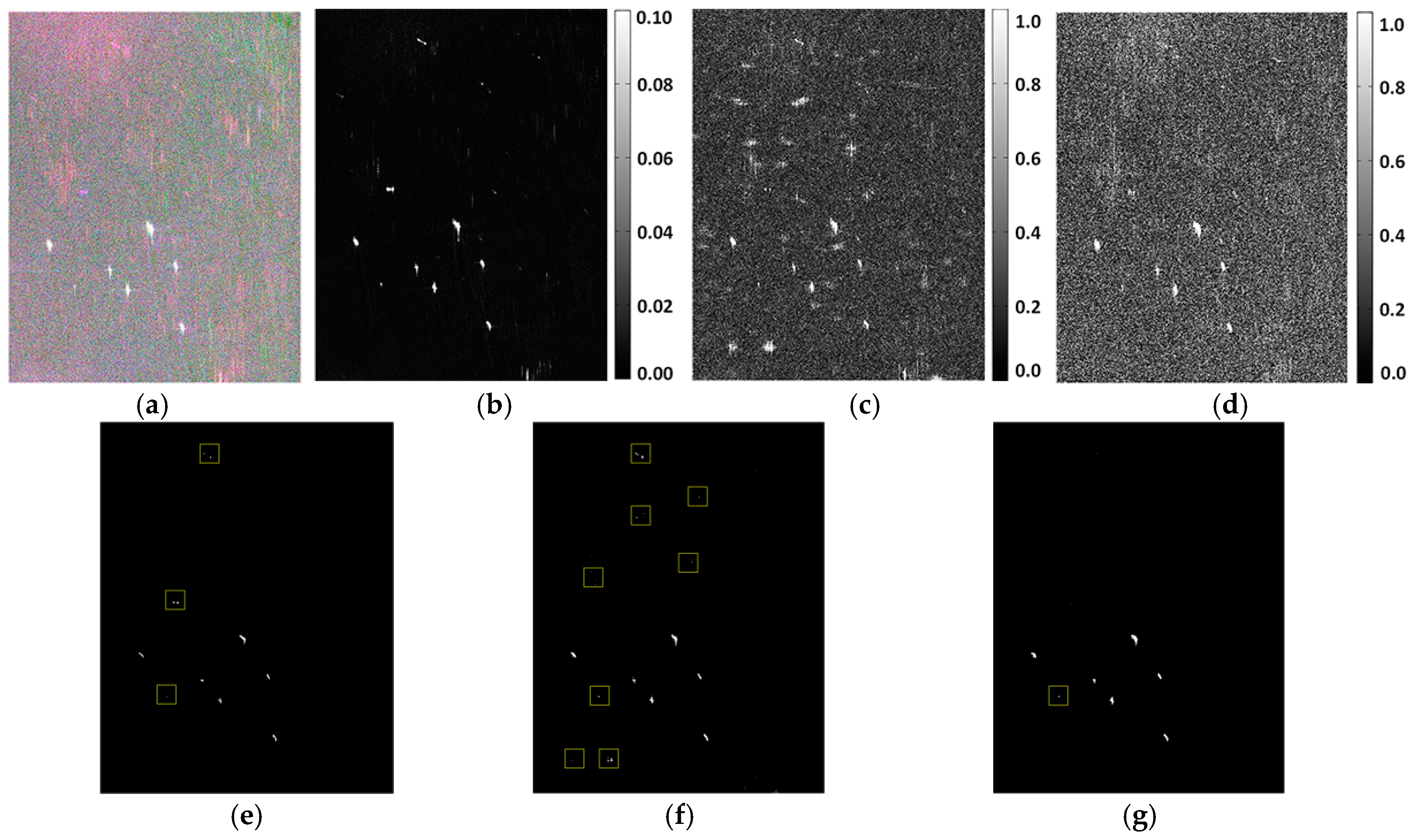
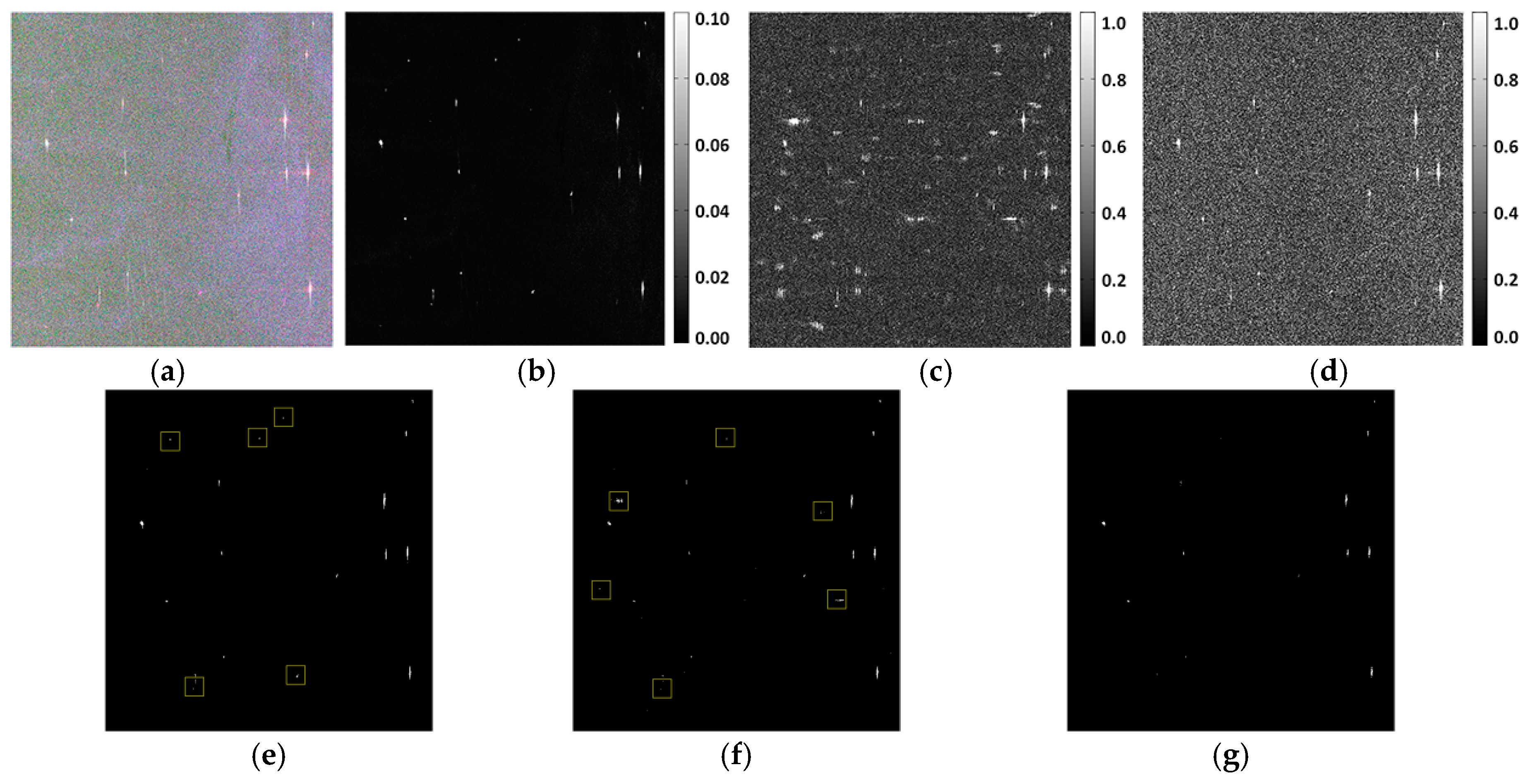
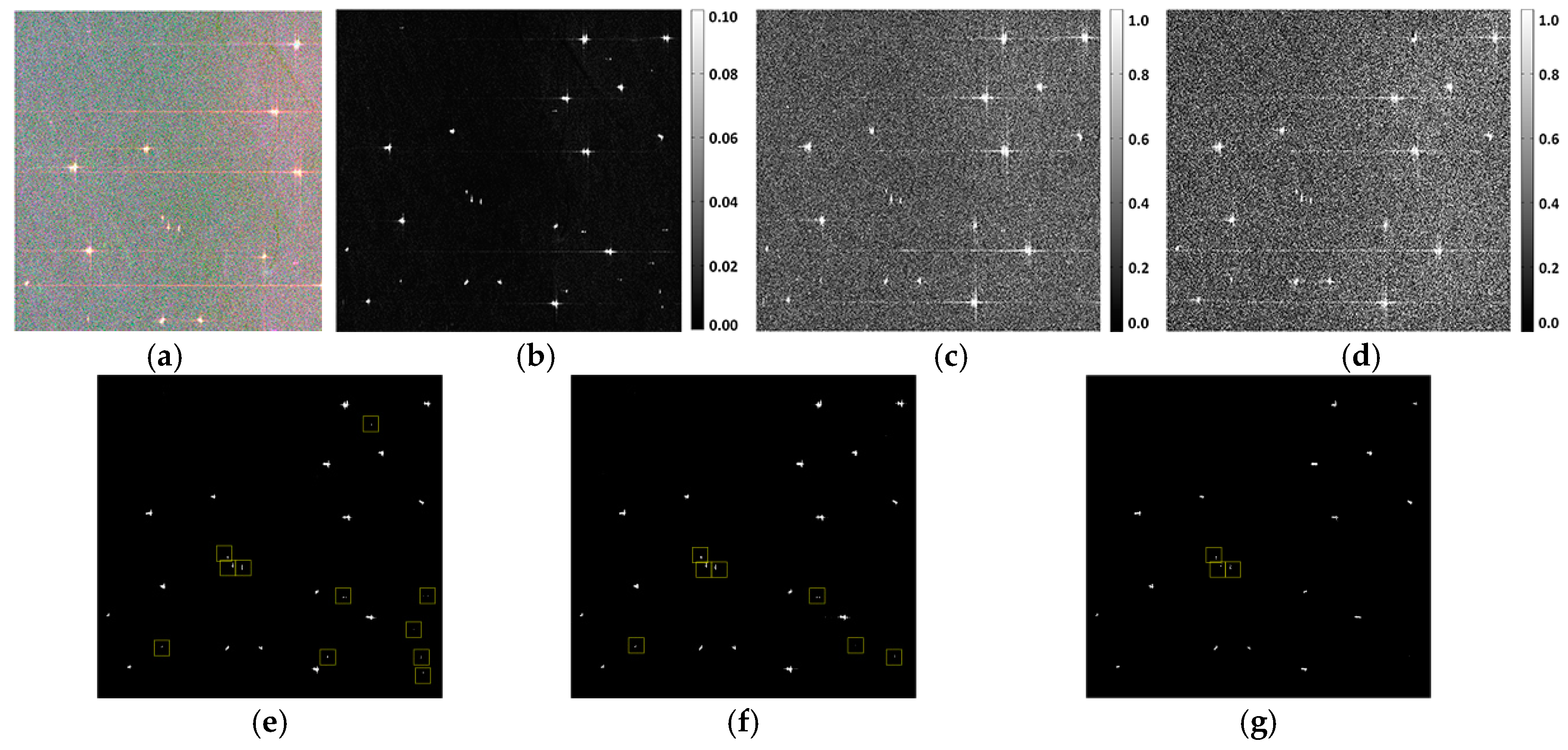
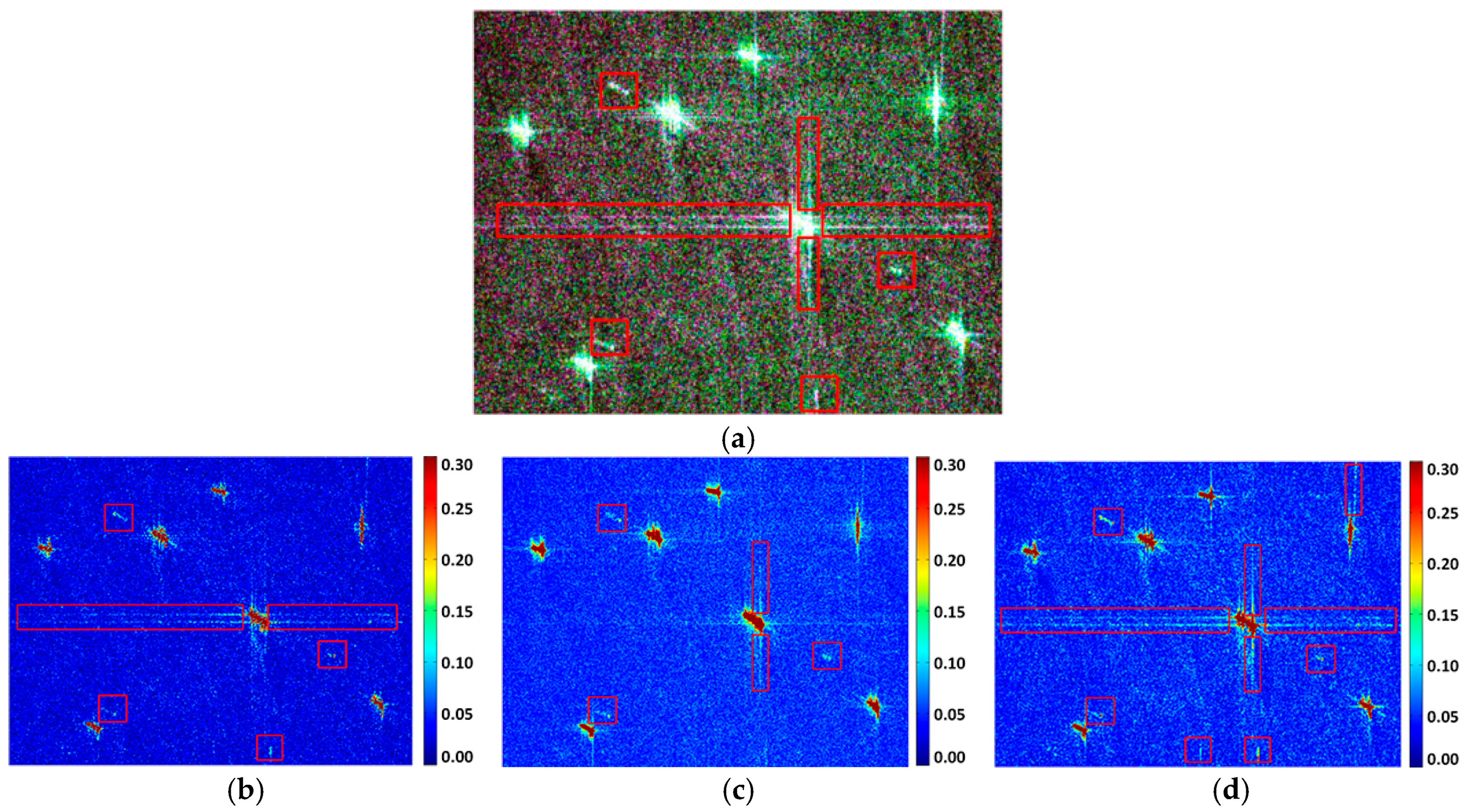
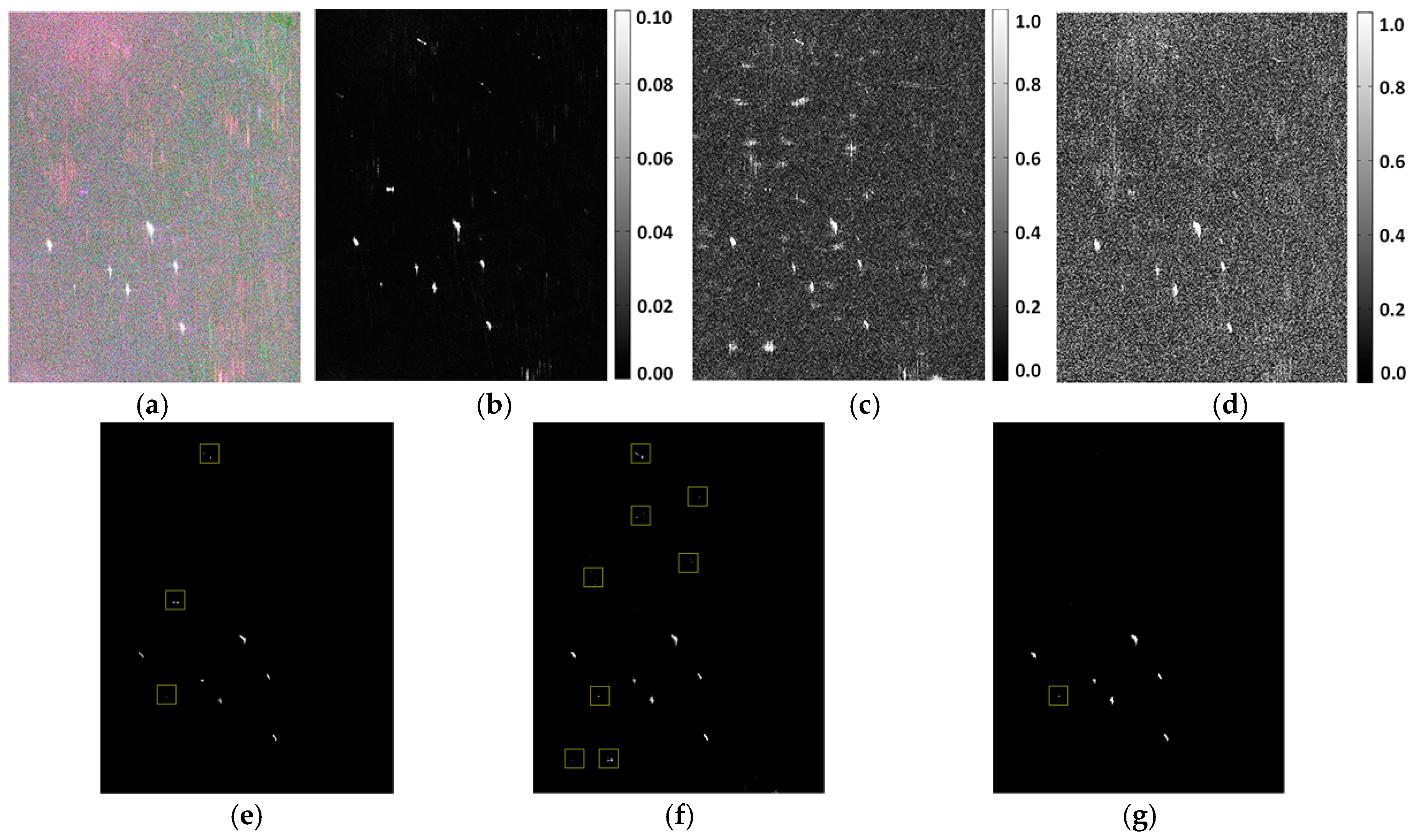
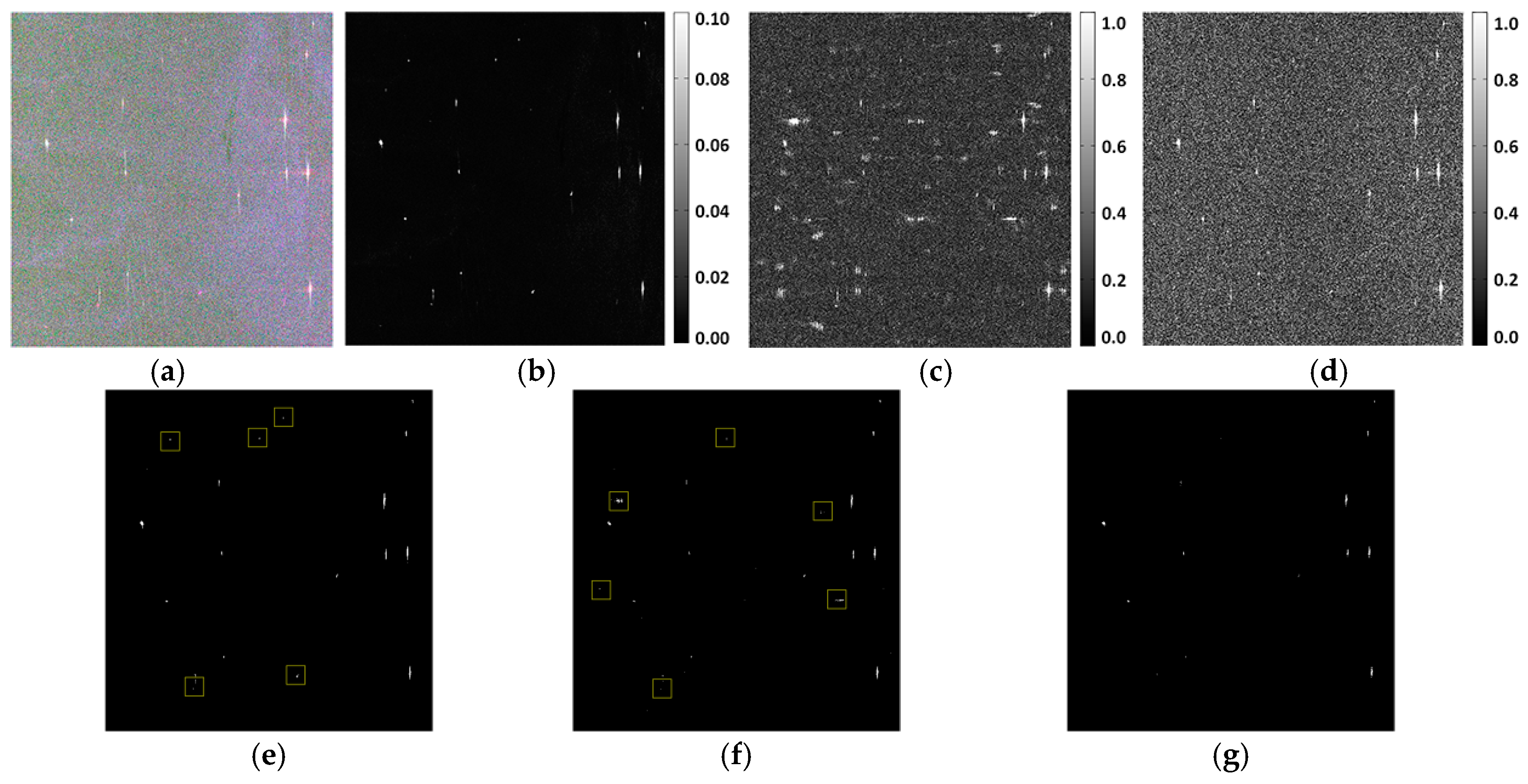
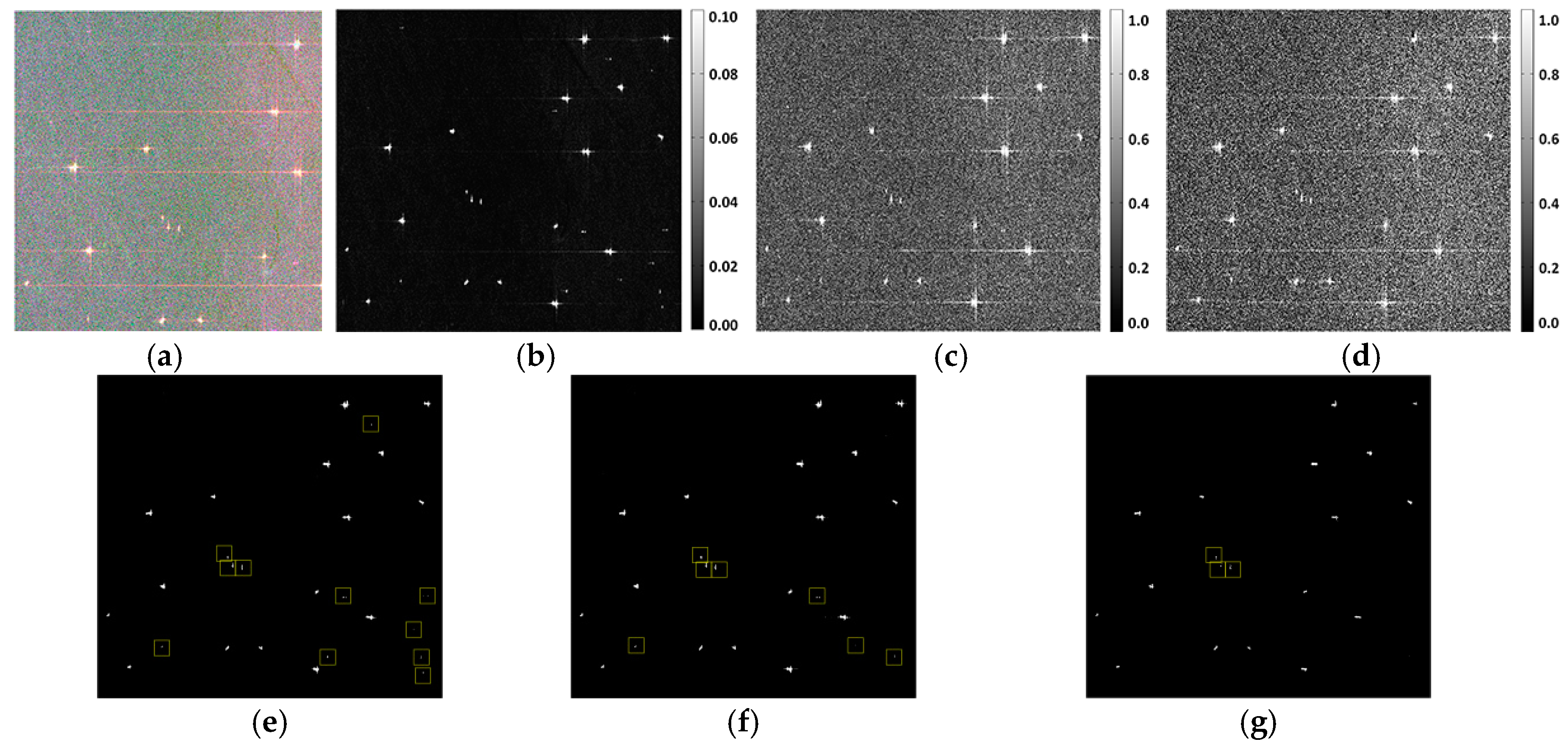
3.2. Discussions of Representative Areas
3.3. Detection Accuracy
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pottier, E.; Boerner, W.M.; Schuler, D.L. Polarimetric detection and estimation of ship wakes. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Hamburg, Germany, 28 June–2 July 1999; Volume 5, pp. 2458–2460.
- Sciotti, M.; Pastina, D.; Lombardo, P. Exploiting the polarimetric information for the detection of ship targets in non-homogeneous SAR images. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Toronto, ON, Canada, 24–28 June 2002; Volume 3, pp. 1911–1913.
- Han, Z.; Chong, J. A review of ship detection algorithms in polarimetric SAR images. In Proceedings of the 7th International Conference on Signal Processing (ICSP), Beijing, China, 31 Auguest–4 September 2004; Volume 3, pp. 2155–2158.
- Liu, C.; Meek, A. Likelihood Ratio Test Polarimetric SAR Ship Detection Application; DTIC Document: Los Angeles, CA, USA, 2005. [Google Scholar]
- Olsen, R.B.; Arnesen, T.N.; Eldhuset, K. Signatures of vessels in envisat ap-mode imagery. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Anchorage, AK, USA, 20–24 September 2004; Volume 6, pp. 3895–3897.
- Lei, X.; Hong, Z.; Chao, W.; Fan, W.; Bo, Z.; Yixian, T. Maritime application using h-a decomposition in compact and dual-pol SAR. In Proceedings of the Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Tsukuba, Japan, 23–27 September 2013; pp. 563–566.
- Ringrose, R.; Harris, H. Ship detection using Polarimetric SAR data. In Proceedings of the Committee on Earth Observation Satellites (CEOS) SAR workship, Toulouse, France, 26–29 October 1999; pp. 687–691.
- Touzi, R. On the use of polarimetric SAR data for ship detection. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Hamburg, Germany, 28 June–2 July 1999; Volume 2, pp. 812–814.
- Marino, A. A notch filter for ship detection with polarimetric SAR data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1219–1232. [Google Scholar] [CrossRef]
- Marino, A.; Hajnsek, I. Statistical tests for a ship detector based on the polarimetric notch filter. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4578–4595. [Google Scholar] [CrossRef]
- Hannevik, T.N.A. Multi-channel and multi-polarisation ship detection. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 5149–5152.
- Nunziata, F.; Migliaccio, M.; Brown, C.E. Reflection symmetry for polarimetric observation of man-made metallic targets at sea. IEEE J. Ocean. Eng. 2012, 37, 384–394. [Google Scholar] [CrossRef]
- Zhang, H.; Xie, L.; Wang, C.; Wu, F.; Zhang, B. Investigation of the capability of H\alpha decomposition of compact polarimetric SAR. IEEE Geosci. Remote Sens. Lett. 2014, 11, 868–872. [Google Scholar] [CrossRef]
- Souyris, J.-C.; Imbo, P.; Fjørtoft, R.; Mingot, S.; Lee, A.-S. Compact polarimetry based on symmetry properties of geophysical media: The π/4 mode. IEEE Trans. Geosci. Remote Sens. 2005, 43, 634–646. [Google Scholar] [CrossRef]
- Stacy, N.; Preiss, M. Compact Polarimetric Analysis of X-band SAR Data. In Proceedings of the European Conference on Synthetic Aperture Radar (EUSAR), Dresden, Germany, 16–18 May 2003.
- Raney, R.K. Hybrid-polarity SAR architecture. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3397–3404. [Google Scholar] [CrossRef]
- Collins, M.J.; Denbina, M.; Atteia, G. On the reconstruction of quad-pol SAR data from compact polarimetry data for ocean target detection. IEEE Trans. Geosci. Remote Sens. 2013, 51, 591–600. [Google Scholar] [CrossRef]
- Raney, R.K.; Spudis, P.D.; Bussey, B.; Crusan, J.; Jensen, J.R.; Marinelli, W.; McKerracher, P.; Neish, C.; Palsetia, M.; Schulze, R.; et al. The lunar mini-rf radars: Hybrid polarimetric architecture and initial results. Proc. IEEE 2011, 99, 808–823. [Google Scholar] [CrossRef]
- Chakraborty, M.; Panigrahy, S.; Rajawat, A.S.; Kumar, R.; Murthy, T.V.R.; Haldar, D.; Chakraborty, A.; Kumar, T.; Rode, S.; Kumar, H.; et al. Initial results using risat-1 c-band SAR data. Curr. Sci. 2013, 104, 490–501. [Google Scholar]
- Turkar, V.; De, S.; Rao, Y.S.; Shitole, S.; Bhattacharya, A.; Das, A. Comparative analysis of classification accuracy for risat-1 compact polarimetric data for various land-covers. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 3586–3589.
- Ainsworth, T.L.; Kelly, J.P.; Lee, J.S. Classification comparisons between dual-pol, compact polarimetric and quad-pol SAR imagery. ISPRS J. Photogramm. Remote Sens. 2009, 64, 464–471. [Google Scholar] [CrossRef]
- Truong-Loi, M.L.; Freeman, A.; Dubois-Fernandez, P.C.; Pottier, E. Estimation of soil moisture and faraday rotation from bare surfaces using compact polarimetry. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3608–3615. [Google Scholar] [CrossRef]
- Shirvany, R.; Chabert, M.; Tourneret, J.Y. Comparison of ship detection performance based on the degree of polarization in hybrid/compact and linear dual-pol SAR imagery. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 3550–3553.
- Yin, J.J.; Yang, J.; Zhang, X.Z. On the ship detection performance with compact polarimetry. In Proceedings of the IEEE CIE International Conference on Radar (RADAR), Chengdu, China, 24–27 October 2011; pp. 675–680.
- Nord, M.E.; Ainsworth, T.L.; Lee, J.S.; Stacy, N.J.S. Comparison of compact polarimetric synthetic aperture radar modes. IEEE Trans. Geosci. Remote Sens. 2009, 47, 174–188. [Google Scholar] [CrossRef]
- Atteia, G.E.; Collins, M.J. On the use of compact polarimetry SAR for ship detection. ISPRS J. Photogramm. Remote Sens. 2013, 80, 1–9. [Google Scholar] [CrossRef]
- Reigber, A.; Neumann, M.; Ferro-Famil, L.; Jager, M.; Prats, P. Multi-baseline coherence optimisation in partial and compact polarimetric modes. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 7–11 July 2008; pp. II-597–II-600.
- Shirvany, R.; Chabert, M.; Tourneret, J.Y. Ship and oil-spill detection using the degree of polarization in linear and hybrid/compact dual-pol SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 885–892. [Google Scholar] [CrossRef]
- Li, H.Y.; Perrie, W.; He, Y.J.; Lehner, S.; Brusch, S. Target detection on the ocean with the relative phase of compact polarimetry SAR. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3299–3305. [Google Scholar] [CrossRef]
- Yin, J.J.; Yang, J.; Zhou, Z.S.; Song, J.S. The extended bragg scattering model-based method for ship and oil-spill observation using compact polarimetric SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3760–3772. [Google Scholar] [CrossRef]
- Huang, S.; Liu, D.; Gao, G.; Guo, X. A novel method for speckle noise reduction and ship target detection in SAR images. Pattern Recognit. 2009, 42, 1533–1542. [Google Scholar] [CrossRef]
- Borji, A.; Itti, L. State-of-the-art in visual attention modeling. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 185–207. [Google Scholar] [CrossRef] [PubMed]
- Ying, Y.; Bin, W.; Liming, Z. Pulse discrete cosine transform for saliency-based visual attention. In Proceedings of the IEEE 8th International Conference on Development and Learning (ICDL), Shanghai, China, 5–7 June 2009; pp. 1–6.
- Yu, Y.; Ding, Z.; Wang, B.; Zhang, L. Visual attention-based ship detection in SAR images. In Advances in Neural Network Research and Applications; Zeng, Z., Wang, J., Eds.; Springer Berlin Heidelberg: Heidelberg, Germany, 2010; Volume 67, pp. 283–292. [Google Scholar]
- Yu, Y.; Wang, B.; Zhang, L. Hebbian-based neural networks for bottom-up visual attention and its applications to ship detection in SAR images. Neurocomputing 2011, 74, 2008–2017. [Google Scholar] [CrossRef]
- Amoon, M.; Bozorgi, A.; Rezai-rad, G. New method for ship detection in synthetic aperture radar imagery based on the human visual attention system. J. Appl. Remote Sens. 2013, 7, 071599. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Z.; Zhang, H.; Zhang, B.; Wu, F. A polsar ship detector based on a multi-polarimetric-feature combination using visual attention. Int. J. Remote Sens. 2014, 35, 7763–7774. [Google Scholar] [CrossRef]
- Charbonneau, F.; Brisco, B.; McNairn, H.; Vachon, P.; Raney, K. Compact polarimetry: Multi-thematic evaluation. In Proceedings of the 4th International Workshop on Science and Applications of SAR Polarimetry and Polarimetric Interferometry (POLinSAR), Frascati, Italy, 26–30 January 2009; pp. 26–30.
- Charbonneau, F.J.; Brisco, B.; Raney, R.K.; McNairn, H.; Liu, C.; Vachon, P.W.; Shang, J.; DeAbreu, R.; Champagne, C.; Merzouki, A.; et al. Compact polarimetry overview and applications assessment. Can. J. Remote Sens. 2010, 36, S298–S315. [Google Scholar] [CrossRef]
- Raney, R.K.; Cahill, J.T.S.; Patterson, G.W.; Bussey, D.B.J. The m-chi decomposition of hybrid dual-polarimetric radar data. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 5093–5096.
- Sivasankar, T.; Srivastava, H.S.; Sharma, P.K.; Kumar, D.; Patel, P. Study of hybrid polarimetric parameters generated from risat-1 SAR data for various land cover targets. Int. J. Adv. Remote Sens. GIS Grogr. 2015, 3, 32–42. [Google Scholar]
- Yin, J.; Yang, J. Ship detection by using the m-chi and m-delta decompositions. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 3–5 June 2014; pp. 2738–2741.
- Raney, R. A perspective on compact polarimetry. IEEE Geosci. Remote Sens. Newslett. 2011, 160, 12–18. [Google Scholar]
- Li, H.Y.; Perrie, W. Detection of wind farm using the relative phase of compact polarimetry SAR. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 7636–7639.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
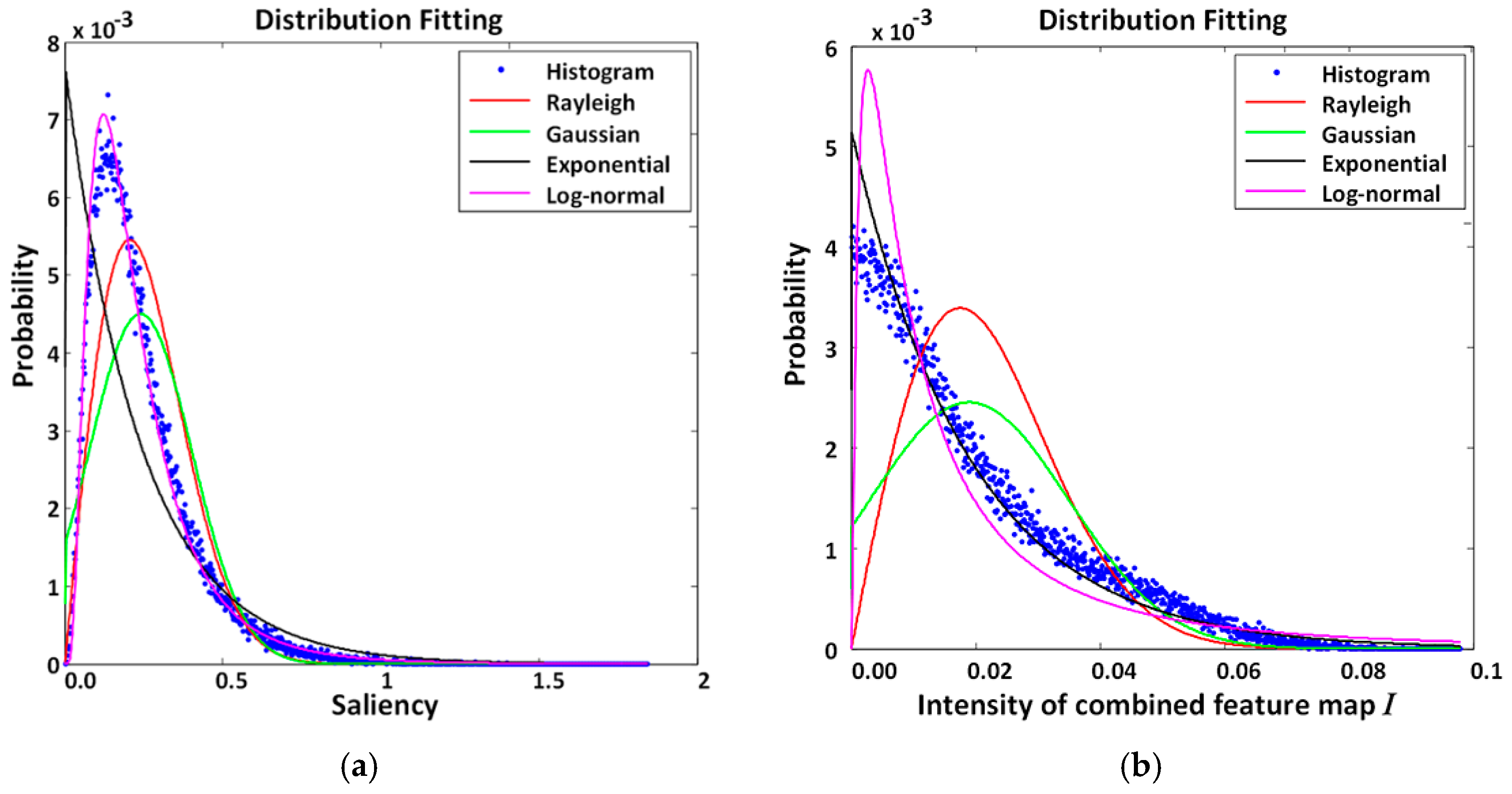
| Distribution | Rayleigh | Gaussian | Exponential | Lognormal | |
|---|---|---|---|---|---|
| MS | KL divergence | 0.2485 | 0.4113 | 0.9951 | 0.1303 |
| KS distance | 0.0028 | 0.0036 | 0.0076 | 0.0010 | |
| RMSE (×10−3) | 0.6245 | 0.8140 | 1.1755 | 0.1814 | |
| I | KL divergence | 0.8562 | 0.4137 | 0.2590 | 0.6436 |
| KS distance | 0.0041 | 0.0035 | 0.0015 | 0.0041 | |
| RMSE (×10−3) | 0.9638 | 0.7484 | 0.2226 | 0.5111 |
| No. | Acquisition Date | Image Size (Azimuth × Range) | Pixel Spacing (Azimuth/Range, m) | Incidence Angle (°) | AIS Data |
|---|---|---|---|---|---|
| 1 | 13 July 2010 | 4364 × 6323 | 4.73/5.12 | 48.32–49.47 | Yes |
| 2 | 13 July 2010 | 4364 × 6477 | 4.73/5.12 | 48.32–49.47 | Yes |
| 3 | 22 January 2014 | 4040 × 5816 | 5.73/5.06 | 43.65–44.95 | Yes |
| Distribution | Rayleigh | Gaussian | Exponential | Lognormal |
|---|---|---|---|---|
| KL divergence | 0.2678 | 0.4235 | 0.8102 | 0.0654 |
| KS distance | 0.0047 | 0.0063 | 0.0135 | 0.0015 |
| RMSE (×10−3) | 0.8540 | 1.1228 | 1.5521 | 0.2128 |
| Method | ND | NT | NFA | RMT (%) | RD (%) | FoM (%) | sig | Time (s) |
|---|---|---|---|---|---|---|---|---|
| Data 1 | ||||||||
| SPAN | 90 | 101 | 6 | 6.67 | 89.11 | 84.11 | 223.61 | 16.09 |
| RH amplitude saliency | 95 | 101 | 41 | 43.16 | 94.06 | 66.90 | 132.06 | 20.52 |
| Proposed method | 97 | 101 | 3 | 3.09 | 96.04 | 93.27 | 602.57 | 29.25 |
| Data 2 | ||||||||
| SPAN | 68 | 70 | 19 | 27.94 | 97.14 | 76.40 | 421.29 | 16.59 |
| RH amplitude saliency | 69 | 70 | 50 | 72.46 | 98.57 | 57.50 | 385.93 | 20.95 |
| Proposed method | 69 | 70 | 8 | 11.59 | 98.57 | 88.46 | 714.65 | 30.72 |
| Data 3 | ||||||||
| SPAN | 92 | 93 | 27 | 29.35 | 98.92 | 76.67 | 91.06 | 10.75 |
| RH amplitude saliency | 93 | 93 | 31 | 33.33 | 100 | 75.00 | 71.63 | 13.06 |
| Proposed method | 93 | 93 | 16 | 17.20 | 100 | 85.32 | 274.16 | 21.05 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Zhang, H.; Wang, C.; Zhang, B.; Tian, S. Compact Polarimetric SAR Ship Detection with m-δ Decomposition Using Visual Attention Model. Remote Sens. 2016, 8, 751. https://doi.org/10.3390/rs8090751
Xu L, Zhang H, Wang C, Zhang B, Tian S. Compact Polarimetric SAR Ship Detection with m-δ Decomposition Using Visual Attention Model. Remote Sensing. 2016; 8(9):751. https://doi.org/10.3390/rs8090751
Chicago/Turabian StyleXu, Lu, Hong Zhang, Chao Wang, Bo Zhang, and Sirui Tian. 2016. "Compact Polarimetric SAR Ship Detection with m-δ Decomposition Using Visual Attention Model" Remote Sensing 8, no. 9: 751. https://doi.org/10.3390/rs8090751
APA StyleXu, L., Zhang, H., Wang, C., Zhang, B., & Tian, S. (2016). Compact Polarimetric SAR Ship Detection with m-δ Decomposition Using Visual Attention Model. Remote Sensing, 8(9), 751. https://doi.org/10.3390/rs8090751