1. Introduction
Shoreline location and its change in position are critical for understanding coastal structures [
1], safe navigation [
2,
3], sustainable coastal resource management [
4], and for flood protection and other risk management [
5,
6]. Furthermore, shoreline mapping and monitoring can help to understand the spatial distribution of coastal inundation including its trend over time.
In the literature, shoreline is defined as an intersection of coastal land and water surface indicating water edge movements as the tides rise and fall [
7,
8,
9]. Even though shoreline position can be defined as the waterline at various stages of the tides, e.g., high tide, mid tide, and low tide, the shoreline is largely associated with the sea level [
10]. Ideally, the shoreline is the physical interface of land and water with its position changing through time (Doland
et al. (1980) in Boak and Turner [
8]). Its change results from long-term, cyclic and random variation. Long-term variation includes variation due to sediment storing or due to the relative sea level rise. Cyclic variation is a combination of seasonality and tide, whereas waves, storms and floods cause random variation of a local character.
To properly extract trends from shoreline positions has been a subject of considerable interest. Due to the dynamic nature of the shoreline, shoreline indicators were used as a proxy to represent the “true” shoreline position. Boak and Turner [
8] and Gens [
11] distinguished: (1) a feature that can be distinguished in a coastal imagery; for example, the high water line (HWL) [
12,
13]; (2) the intersection of a tidal datum with a coastal profile, such as the mean high water (MHW); and (3) proxy shoreline features extracted from digital images at the coast, e.g.,
water and
non-water pixels following a binary classification [
14,
15].
Ground surveys and photogrammetry have been used widely to detect shoreline position [
3]. Both methods are relatively expensive and time consuming, hence data derived from remote sensing platforms are widely used nowadays [
8]. Wang [
16] and Dewan and Yamaguchi [
17] applied the optimal threshold values to separate
water and
non-water by giving different cut-off values for each dataset of Landsat TM images. Senthilnatha,
et al. [
18] used a genetic algorithm and particle swarm optimization to distinguish the
water from the
non-water region, based on time-series analysis of images. Martinis,
et al. [
19] applied spectral indices EVI (Enhanced Vegetation Index), LSWI (Land Surface Water Index) and DVEL (Difference Value between EVI and LSWI) to detect water on MODIS data. Ouma and Tateishi [
20] and Ghosh,
et al. [
15] generated a water index to produce a binary class of
water and
non-water, then manually digitized the result to produce a shoreline map. Other methods such as post-classification comparison [
21], binary slicing [
22], masking operation and visual interpretation [
23,
24] have been implemented to derive shoreline change maps.
Many studies on shoreline mapping used hard classifications, whereas few studies exist for fuzzy classification of shorelines [
25,
26]. A hard classification assigns a single label to a pixel, thus allocating each pixel to the class to which it has its highest membership. This could be misleading, because a shoreline is by definition the physical interface of coastal land and water surface with its position changing through time. There is a transition zone between water and land, and hence the boundary is imprecise. In addition, manual digitizing methods are time consuming, costly and labour intensive as they are associated with the large amount of image data required for shoreline mapping and monitoring. Because of these limitations, this study explores fuzzy classification in deriving proxy shoreline features from digital images. Moreover, to map the dynamic shoreline positions and to extract their changes requires the handling of uncertainty. Most studies regarding shoreline change detection explored uncertainty modelling with a focus on aerial imagery [
27,
28] and a statistical uncertainty analysis [
29,
30]. Our study focuses on: (1) inherent uncertainty due to continuous variation of a shoreline over time; and (2) uncertainty as it propagates from extraction and implementation of the shoreline change detection method.
To deal with these uncertainties, fuzzy c-means (FCM) classification developed by Bezdek,
et al. [
31] was applied. Unsupervised FCM for two classes (
water and
non-water) is expected to support a rapid mapping of shoreline changes and give an accurate shoreline position by allowing multiple memberships for a pixel. The current study extends that approach by including tide condition. Thus, a change detection method was implemented to distinguish abrupt and gradual changes at the object level and provide the change uncertainty at the pixel level.
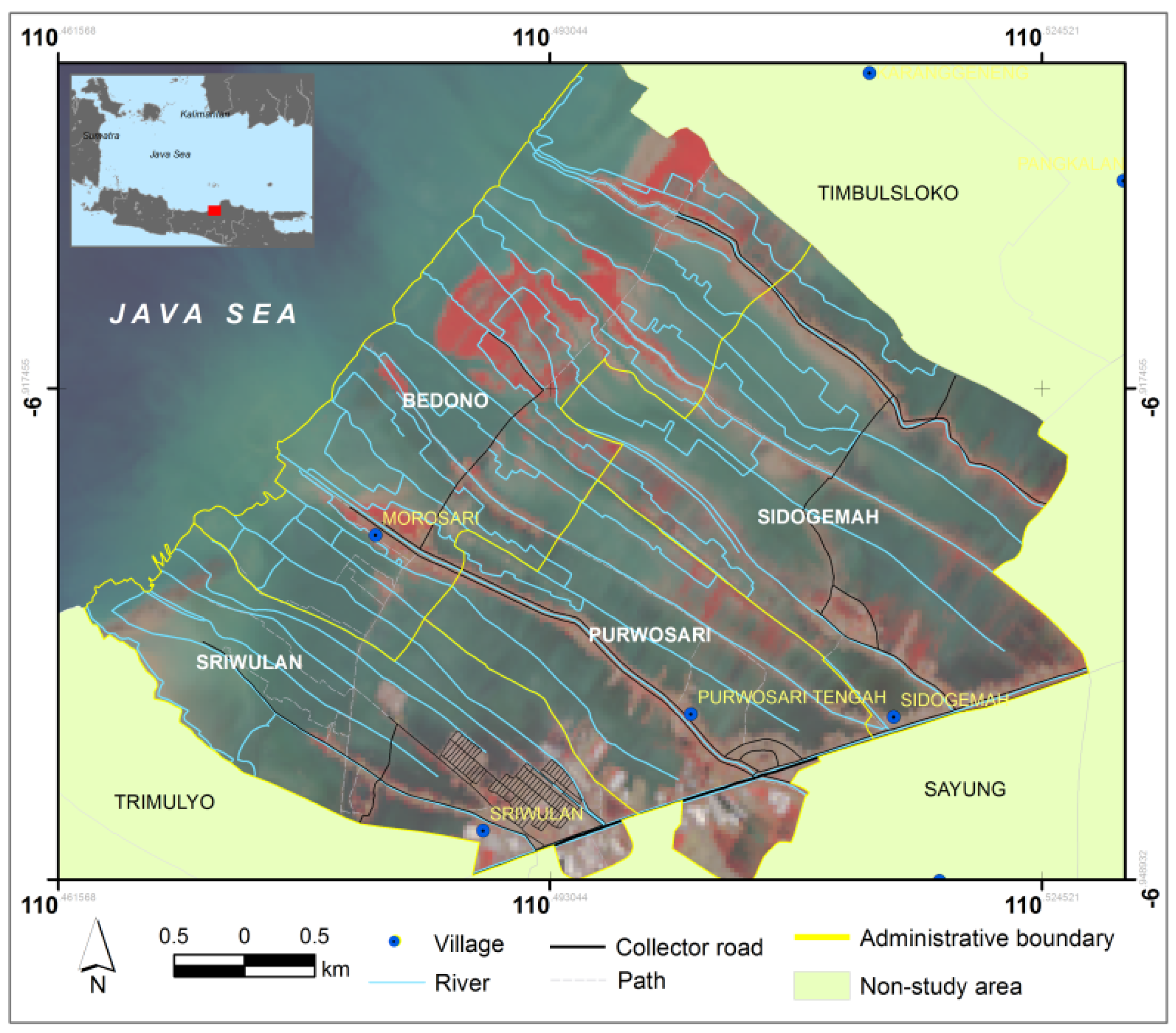
The objective of this study was to develop a fuzzy method that is useful for detecting shoreline changes from multi-temporal images by taking the gradual transition between water and land and the tides into account. The method, based on fuzzy classification and change uncertainty, will be described by means of possibility and necessity measures. The method is applied to an area in Java, where the northern coastal area of Sayung sub-district experienced a severe change of shoreline position.
4. Discussion
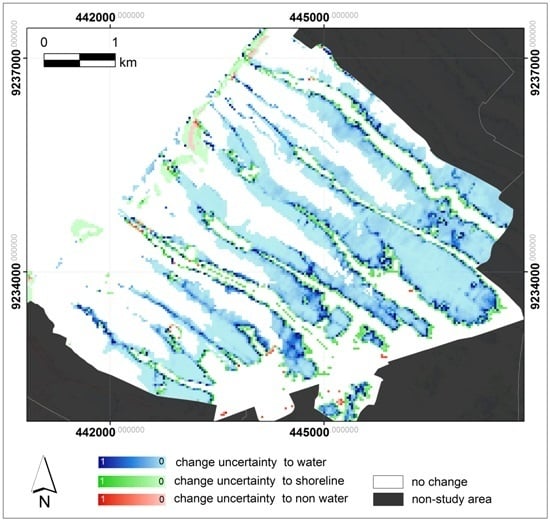
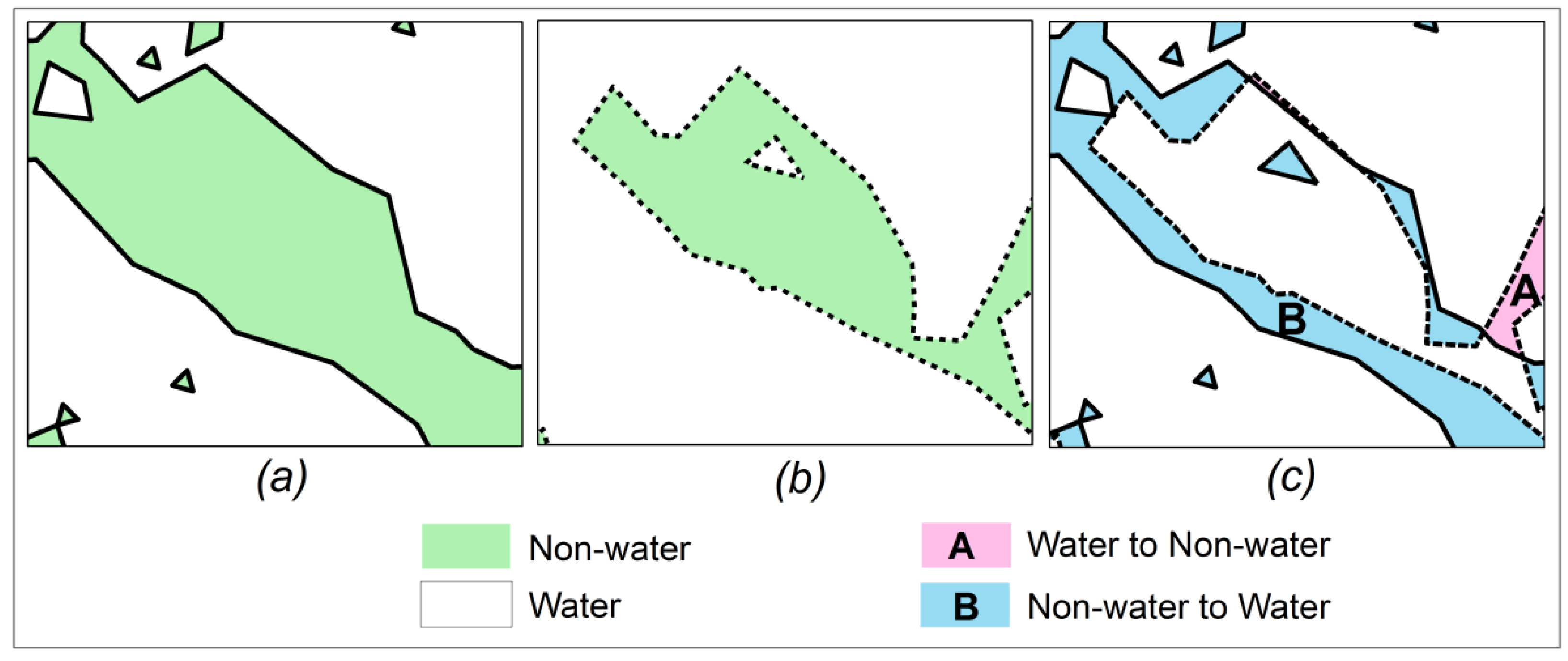
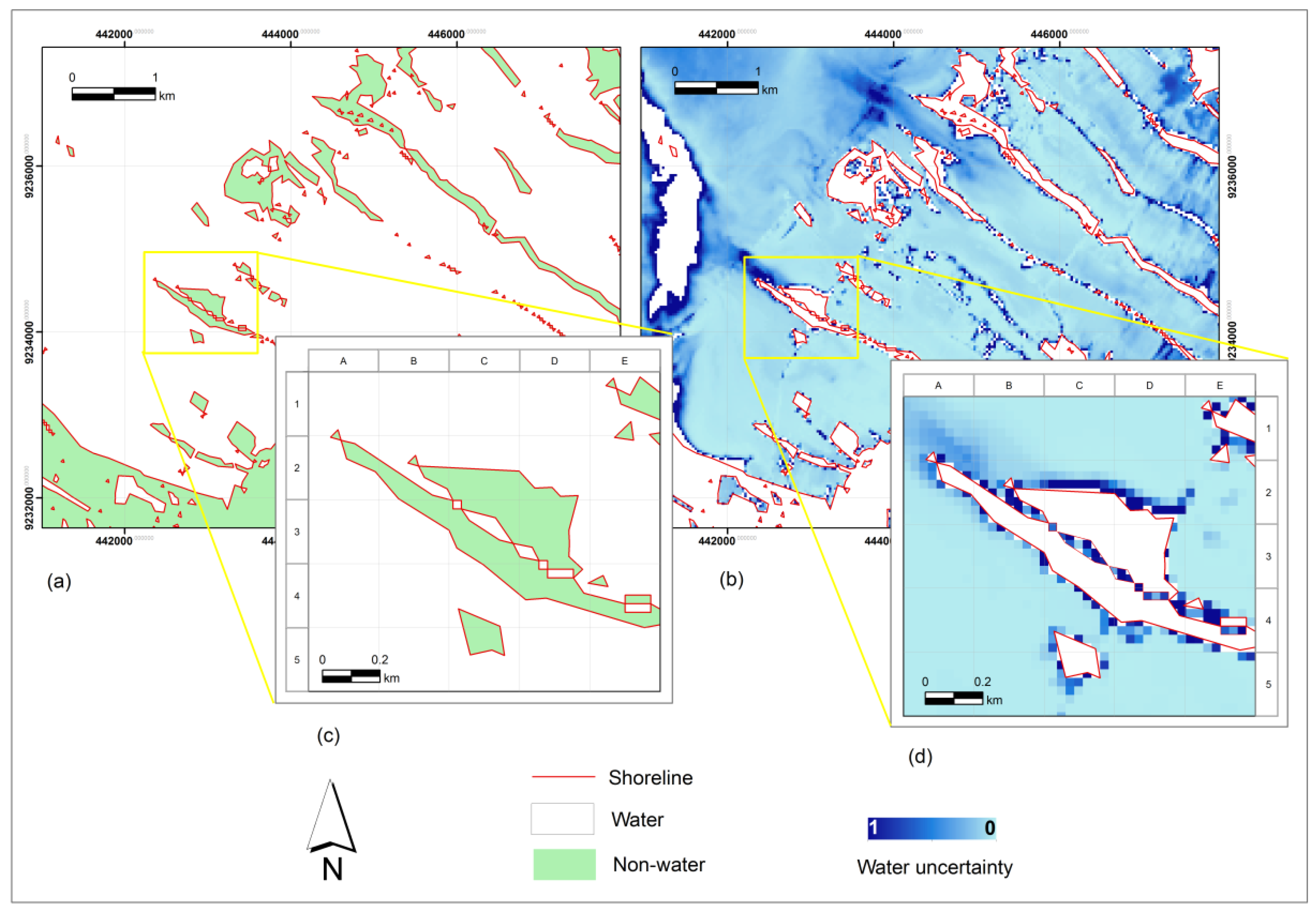
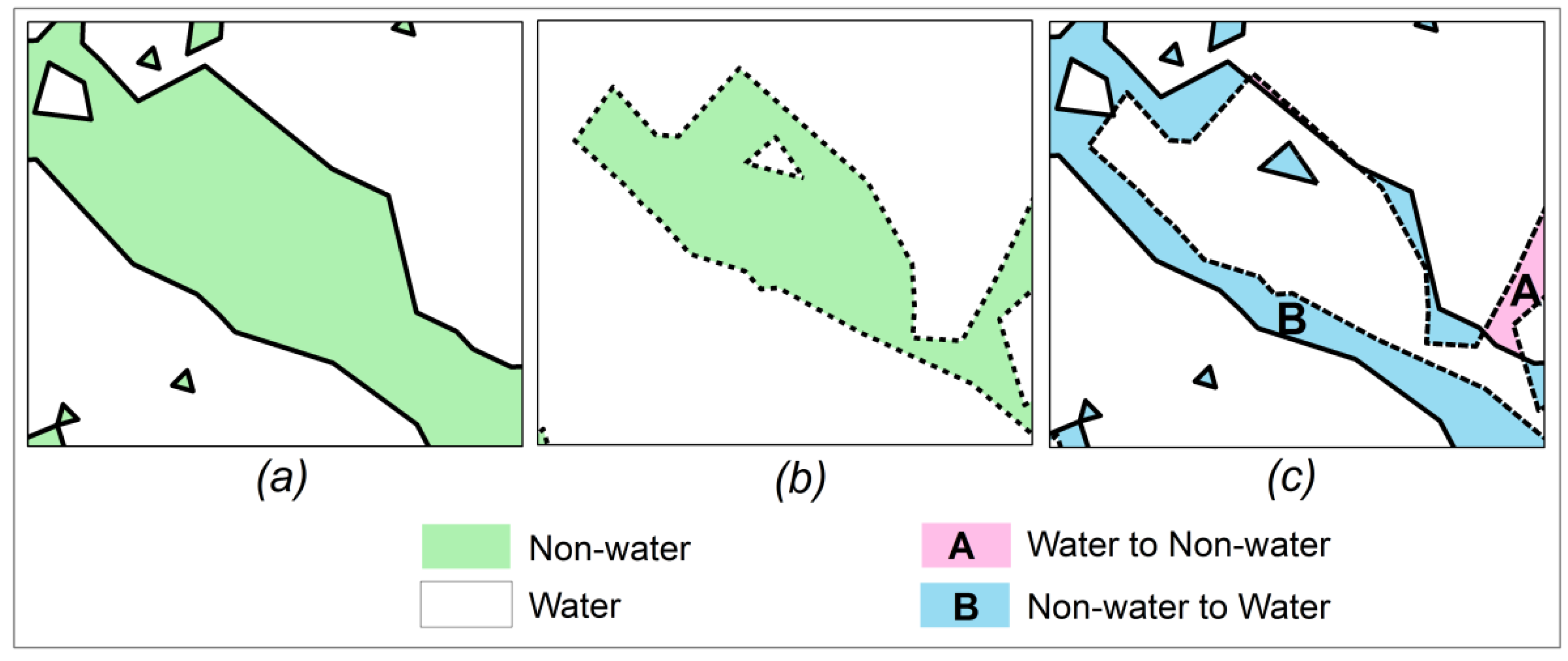
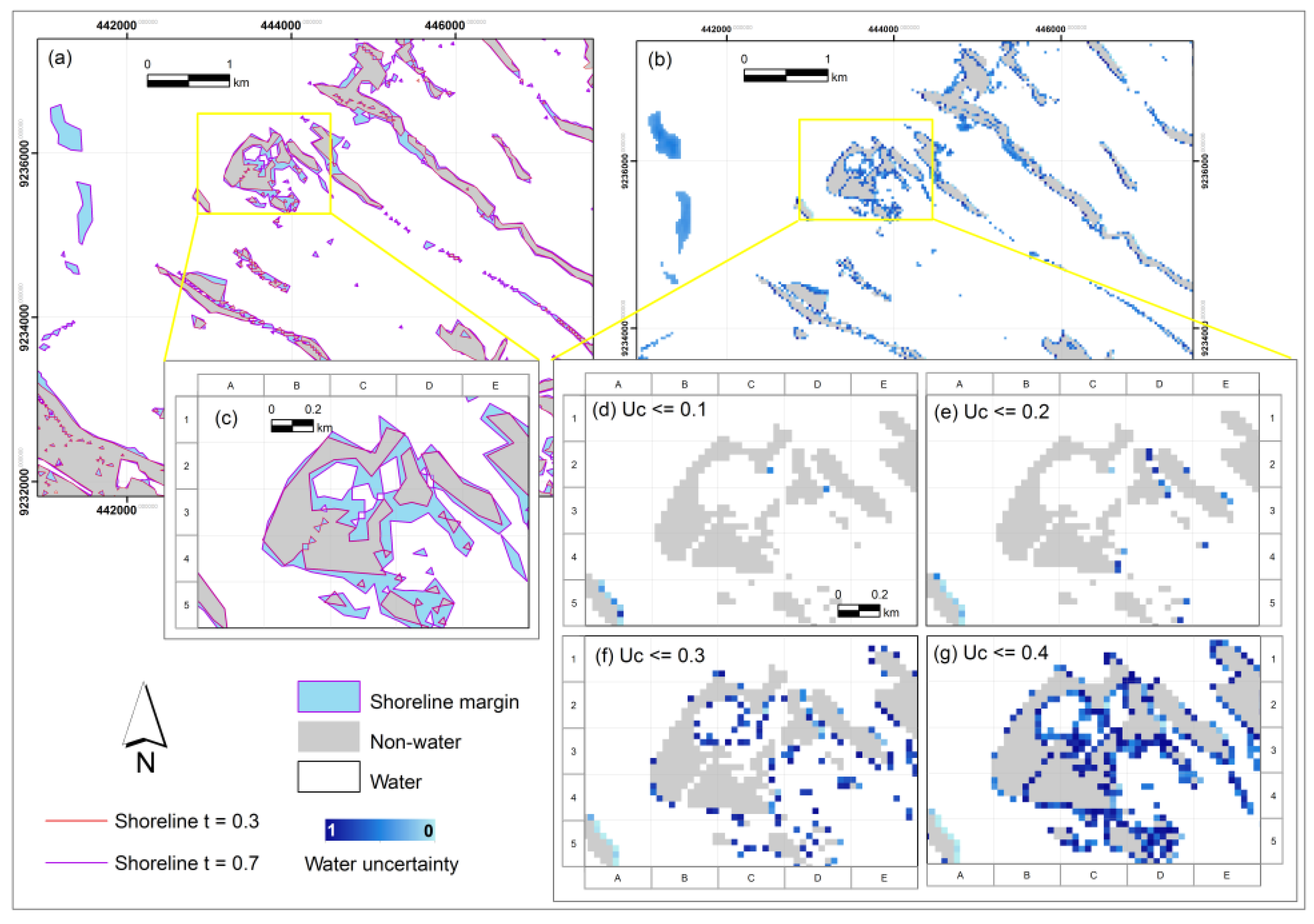
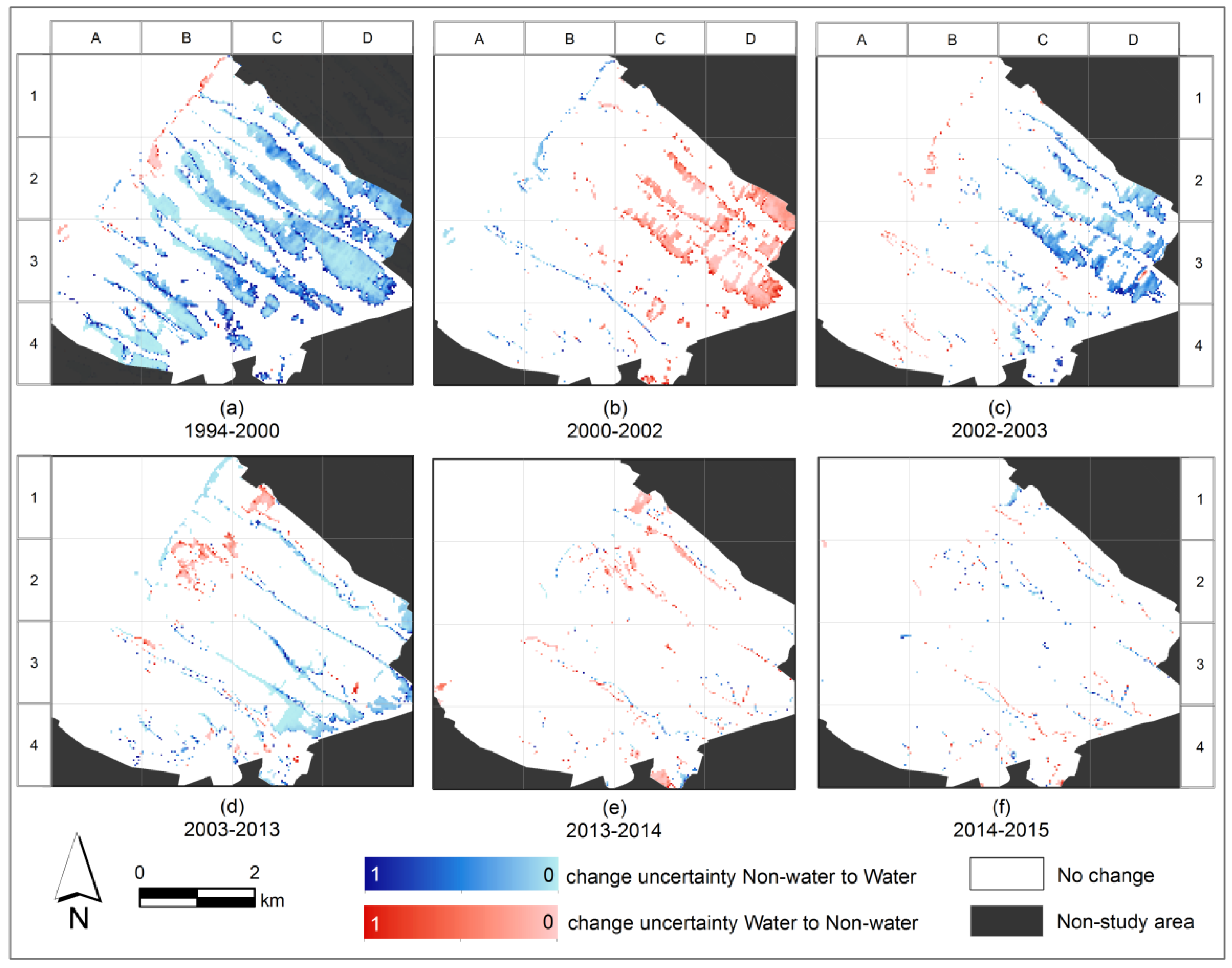
In this paper, we have demonstrated two change detection methods for shoreline considering its complex and fuzzy nature including its uncertainty. Both methods were successful in identifying abrupt and gradual changes of shoreline at an object level and in estimating the spatial distribution of uncertainty at the pixel level. The first method derived the shoreline by applying a threshold
t = 0.5 on the
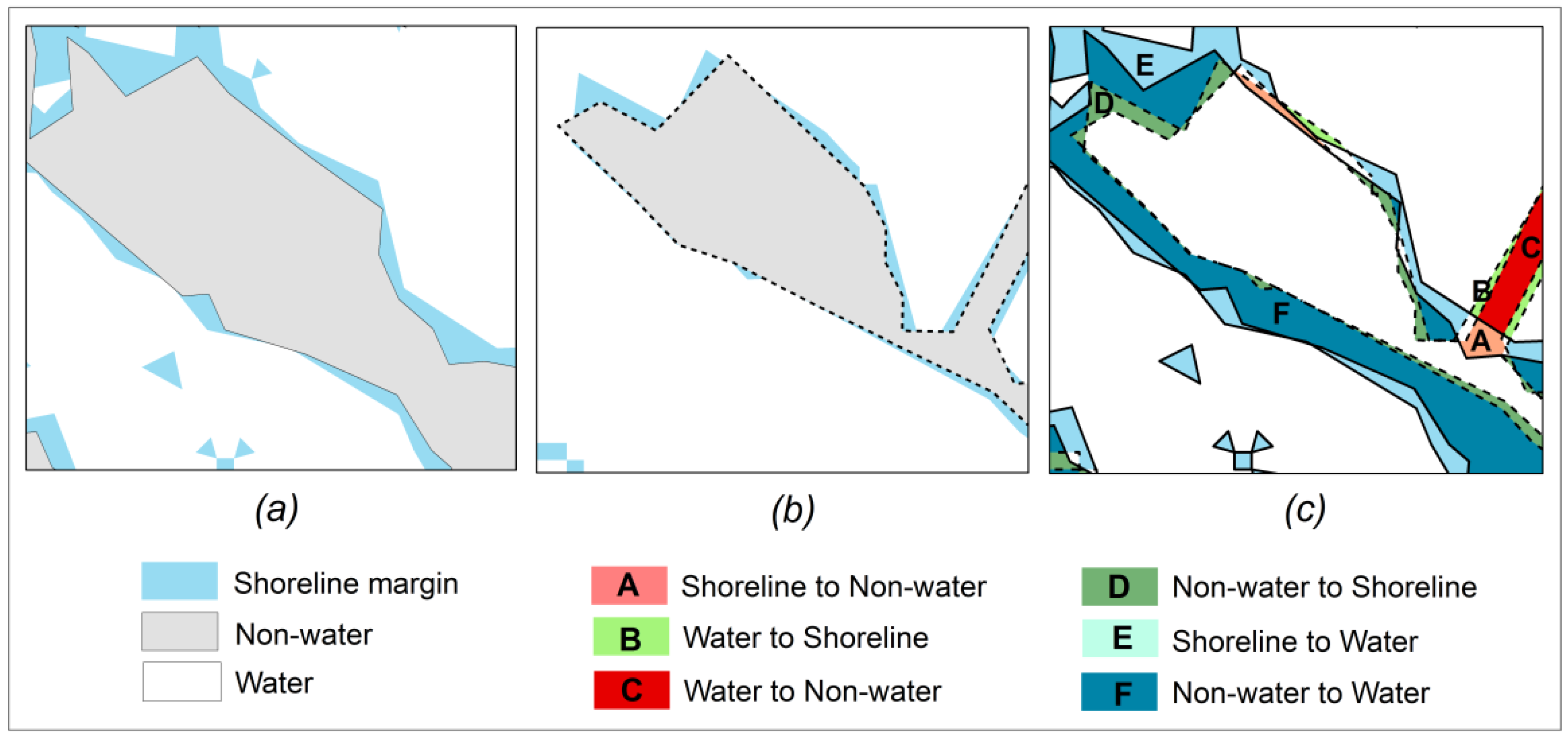
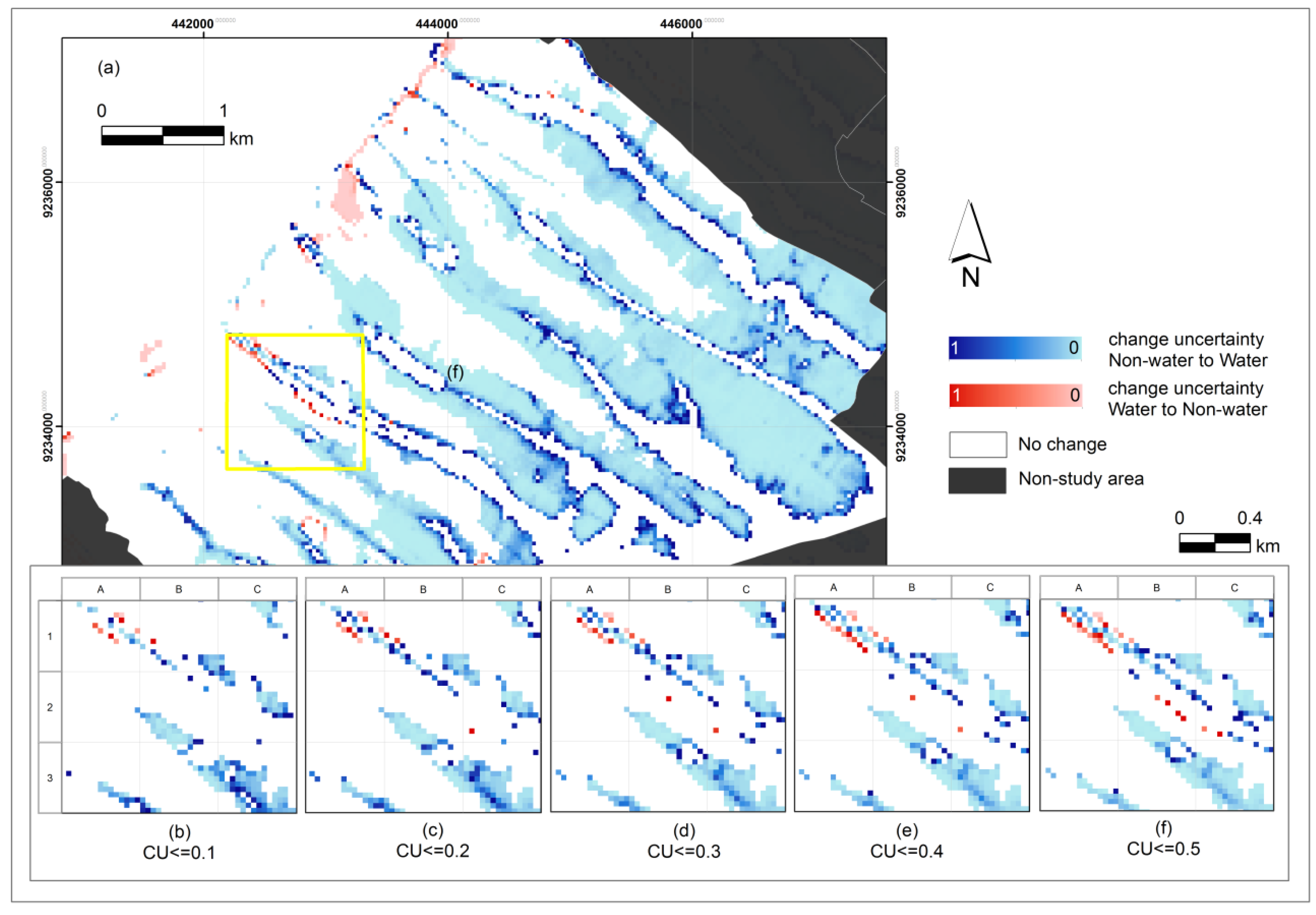
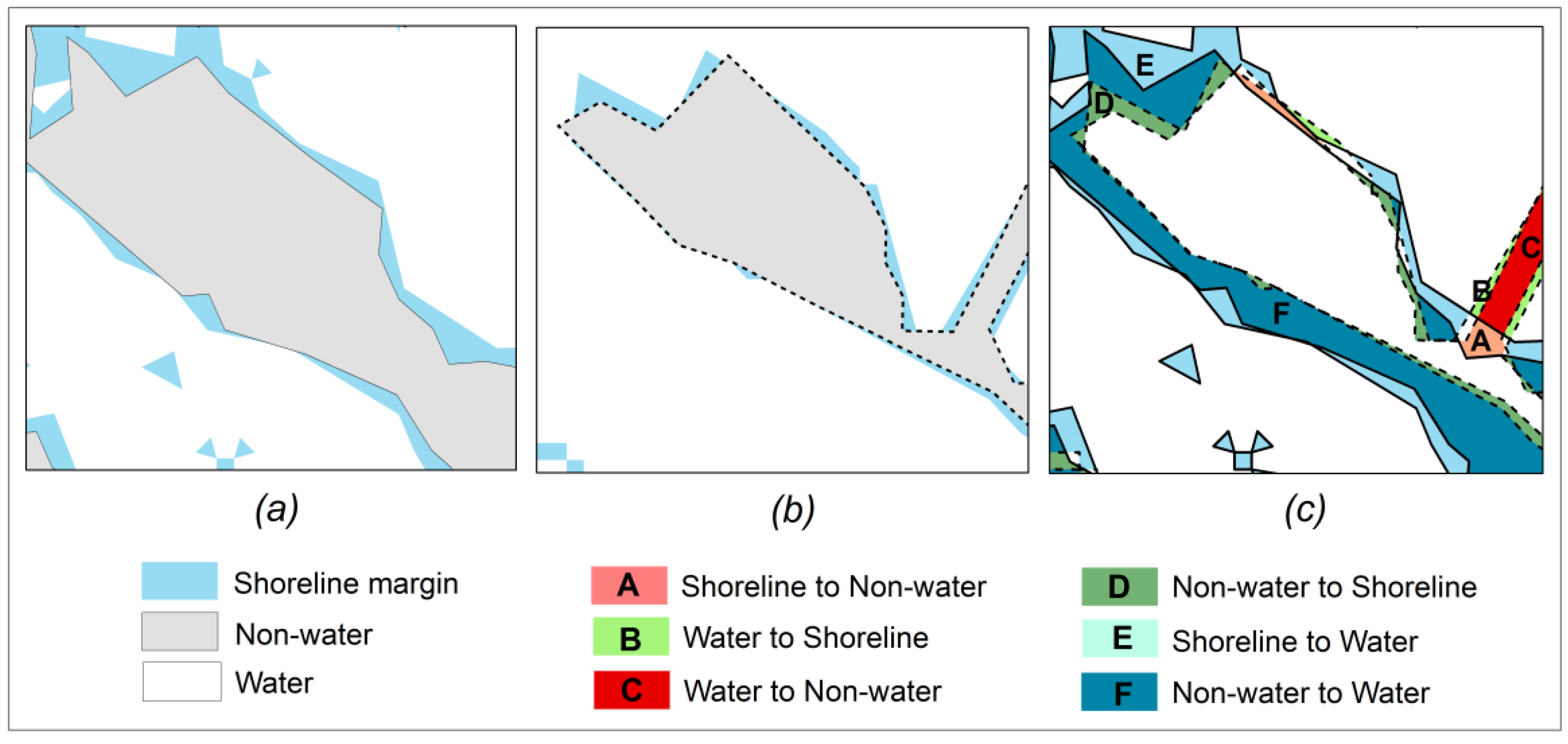
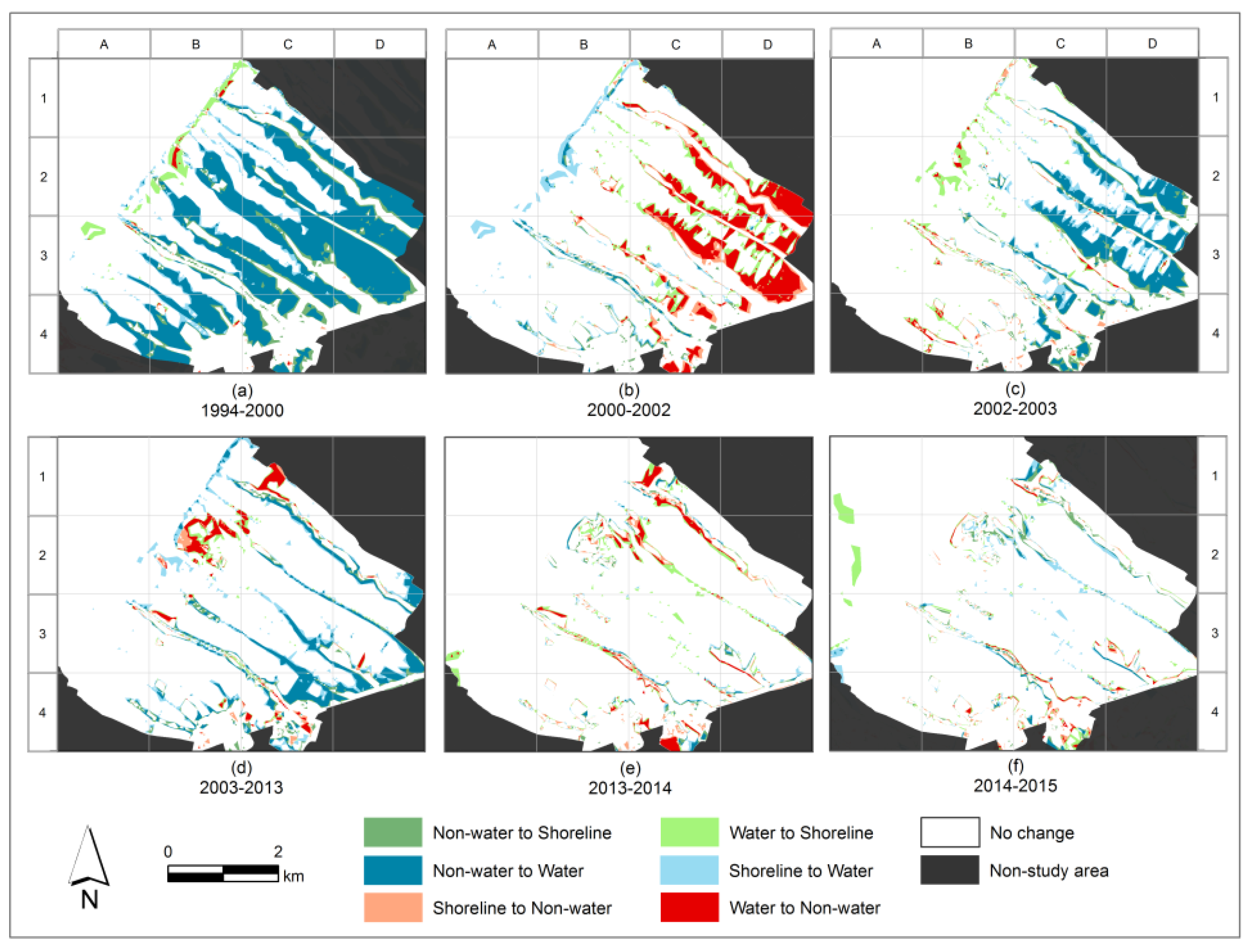
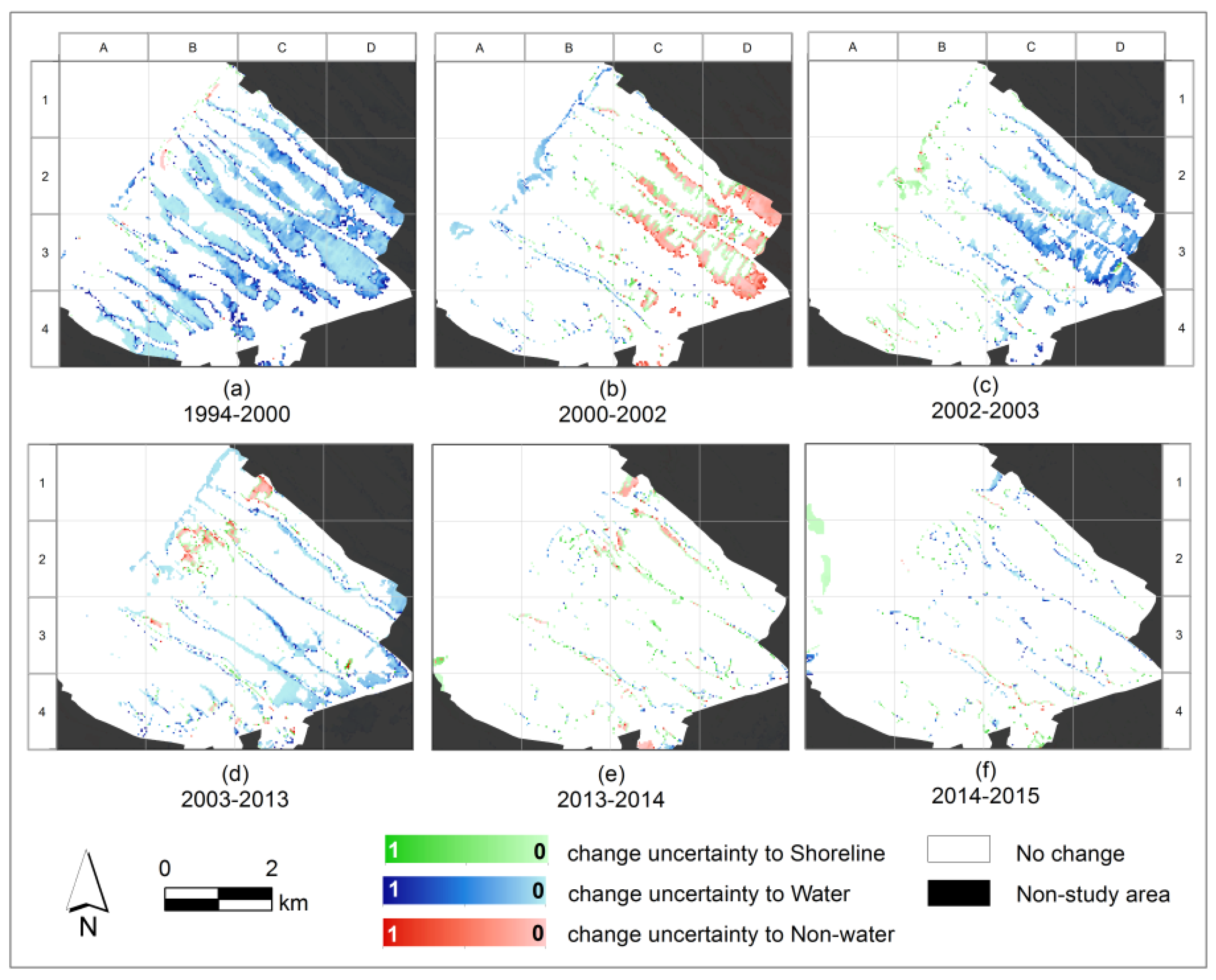
water membership images. Shoreline was then considered as a single line; its position was influenced by the spatial extent of its associated sub-areas. The uncertainty in the shoreline position could be assessed by means of the uncertainty of its associated sub-areas. The second method derived shoreline margin as an area in which water moves to and fro as tides rise and fall. This margin was presented as a crisp object with a boundary determined by
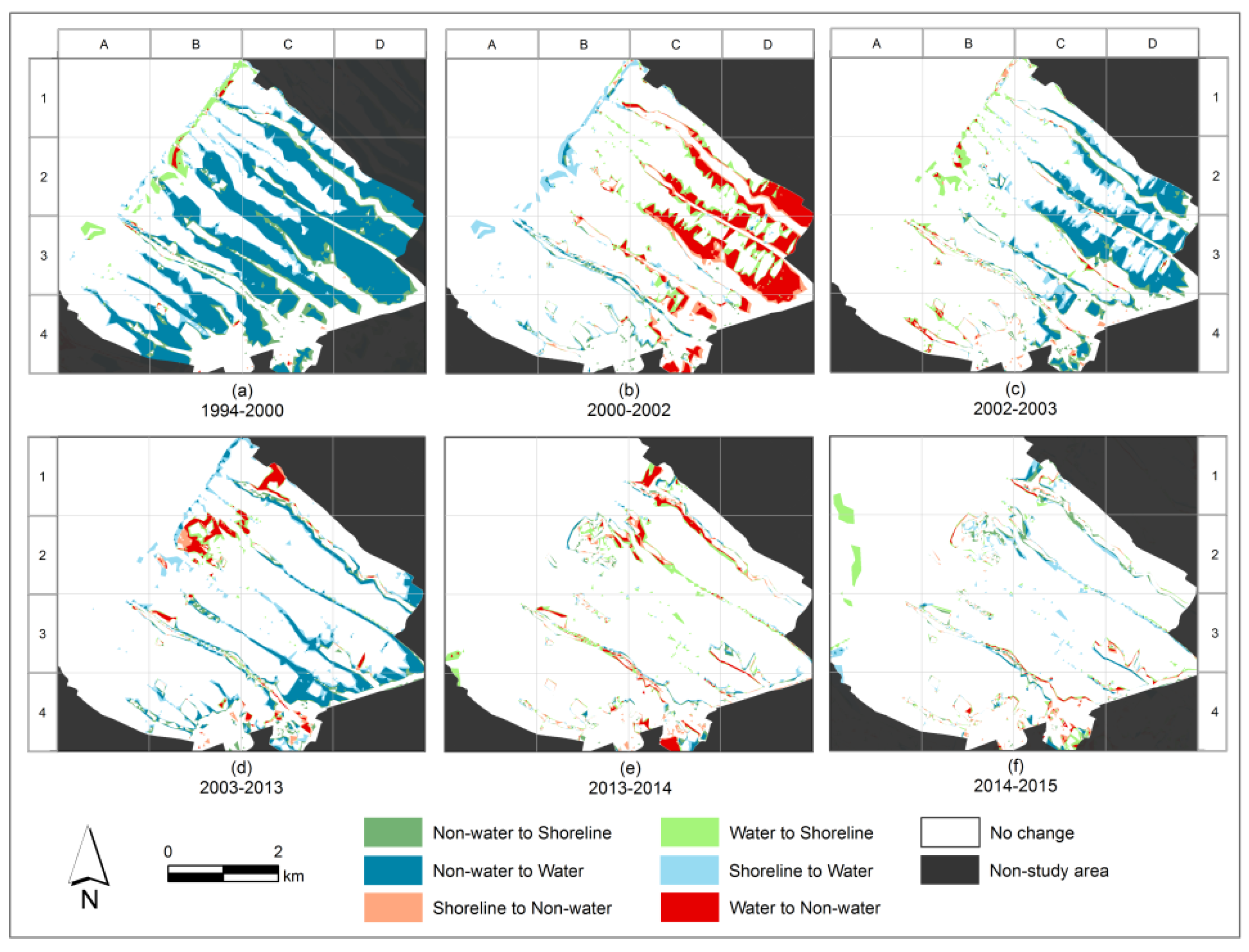
t values resulting from parameter estimation. Comparing these showed that the second method allowed us to assess the spatial extent of the shoreline and measure its change in uncertainty at different levels. This method provided more insight into the spatial distribution of changes and their uncertainty and more spatial detail of the process of change from
non-water via
shoreline margin to
water and
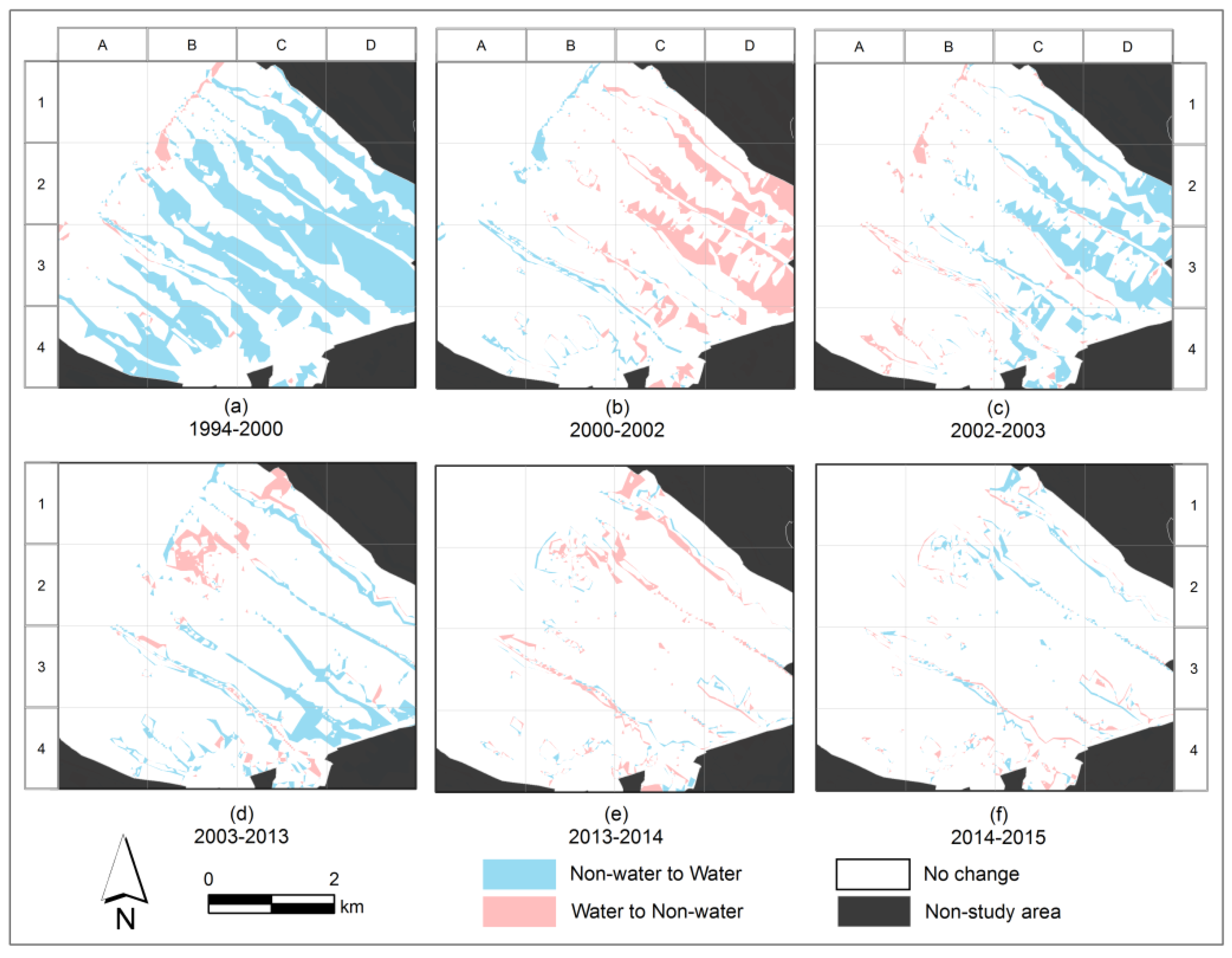
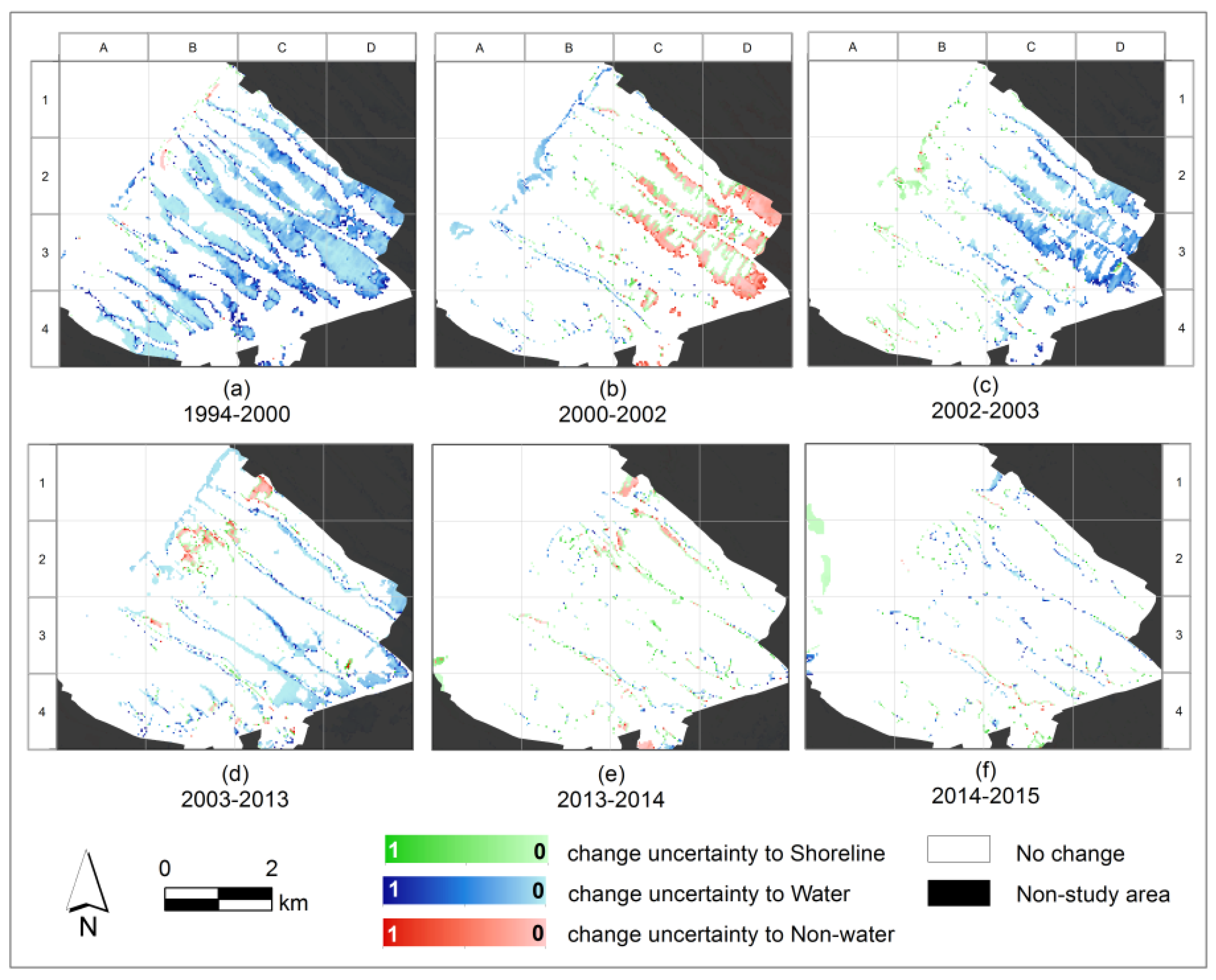
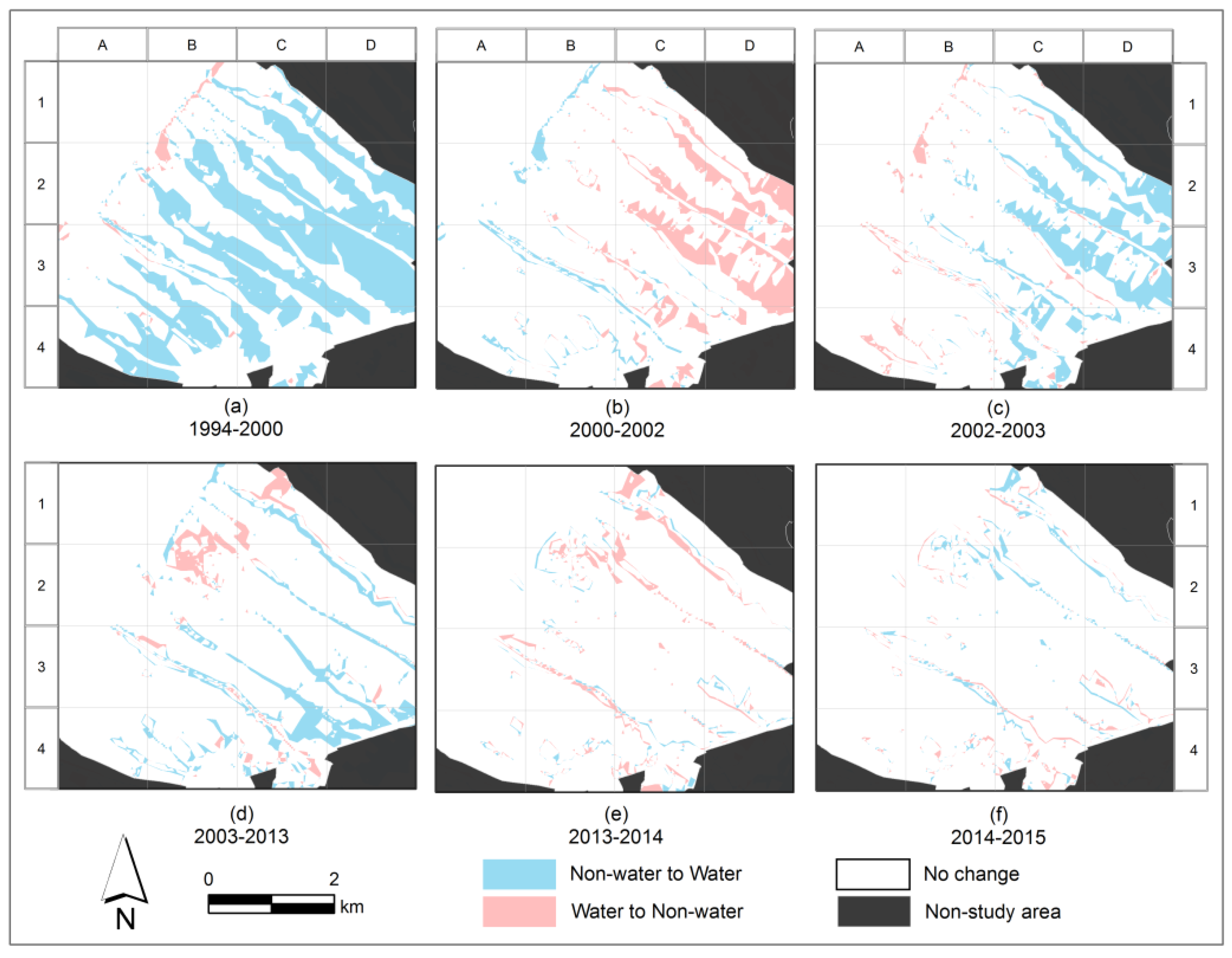
vice versa. In estimating the net change category, both methods gave similar results. Net changes identified by the second method covered a larger area both for negative changes (1994–2000, 2002–2003 and 2003–2013) as well as for positive changes (2000–2002 and 2013–2014), with the exception of 2014–2015 (see
Table 5 and
Table 7). The different results were mainly due to differences in threshold values when generating the shoreline. Shoreline and its changes have been presented as crisp sub-areas. The changed areas were thus associated with the distribution of change uncertainty.
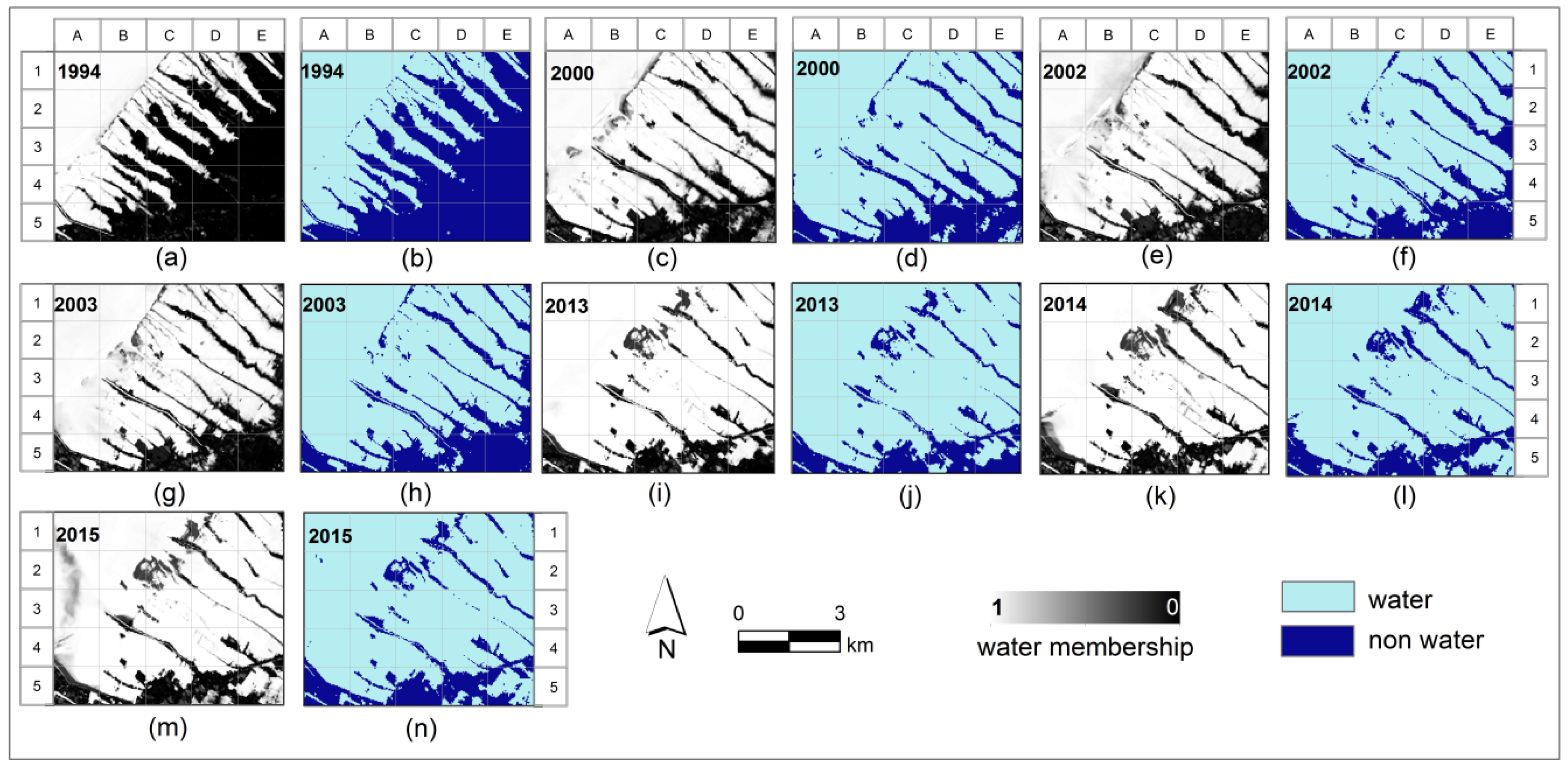
In deriving shorelines as a fuzzy object, we used FCM to calculate the membership. Membership values obtained by applying FCM were used to deal with uncertain information on the position of objects, such as the location of fuzzy shorelines. In this research, we implemented FCM for two classes, since shoreline is the set of locations where
water and
non-water have physical interactions. In addition, the difference between
water and
non-water provided the largest spectral differences in images, as was confirmed in [
52]. For similar situations, a suitable number of clusters need to be specified either by users based on their
a priori knowledge or estimated from the images. In the literature, several methods exist to measure the cluster validity index for finding a suitable number of clusters, as for example exponential cluster validity index, non-fuzziness index, fuzziness performance index, and entropy measure [
53,
54,
55,
56].
Reference data were collected in the field in 2015. In this research, images were selected based on the same low tide condition, and therefore, reference points were also selected under similar low tide conditions. Due to limited availability of high resolution images, however, the 2003 QuickBird image was used for accuracy assessment of images in 2000, 2002 and 2003, even though it was collected during rising tide. Differences in tides between images and these reference data have led to a low accuracy of classified images for 2000, 2002 and 2003, as compared to 2013 and 2015. Moreover, because of limited availability of Landsat images and severe cloud cover problems in the study area, other criteria such as availability of images with the same seasonal condition have not been applied yet. For images captured during rainy seasons, the rain increased the wetness of soil surfaces, which led to a false impression of more flooded conditions in the classified images, and increased the uncertainty in the shoreline position. Landsat images captured in 2000 and 2002 were recorded during the rainy seasons, while the 2003 QuickBird image, used as reference data, was captured during the dry season. Therefore, differences in seasons and tides could have contributed to the misclassification of water and non-water leading to lower classification accuracy. Considering the larger availability of new satellite images in the future, we recommend to select images recorded under similar, preferably dry, seasonal conditions to reduce the uncertainty due to seasonal influence.
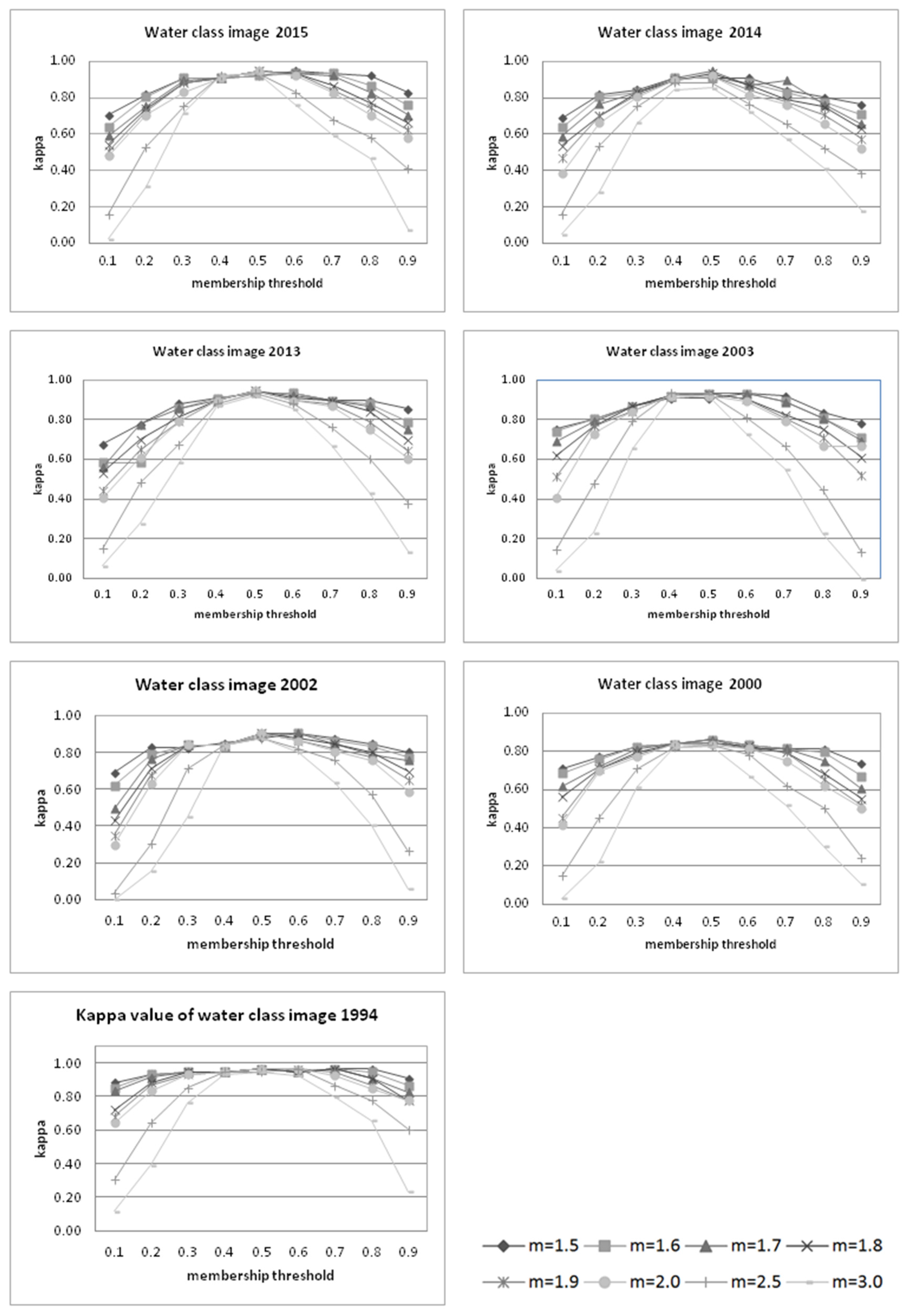
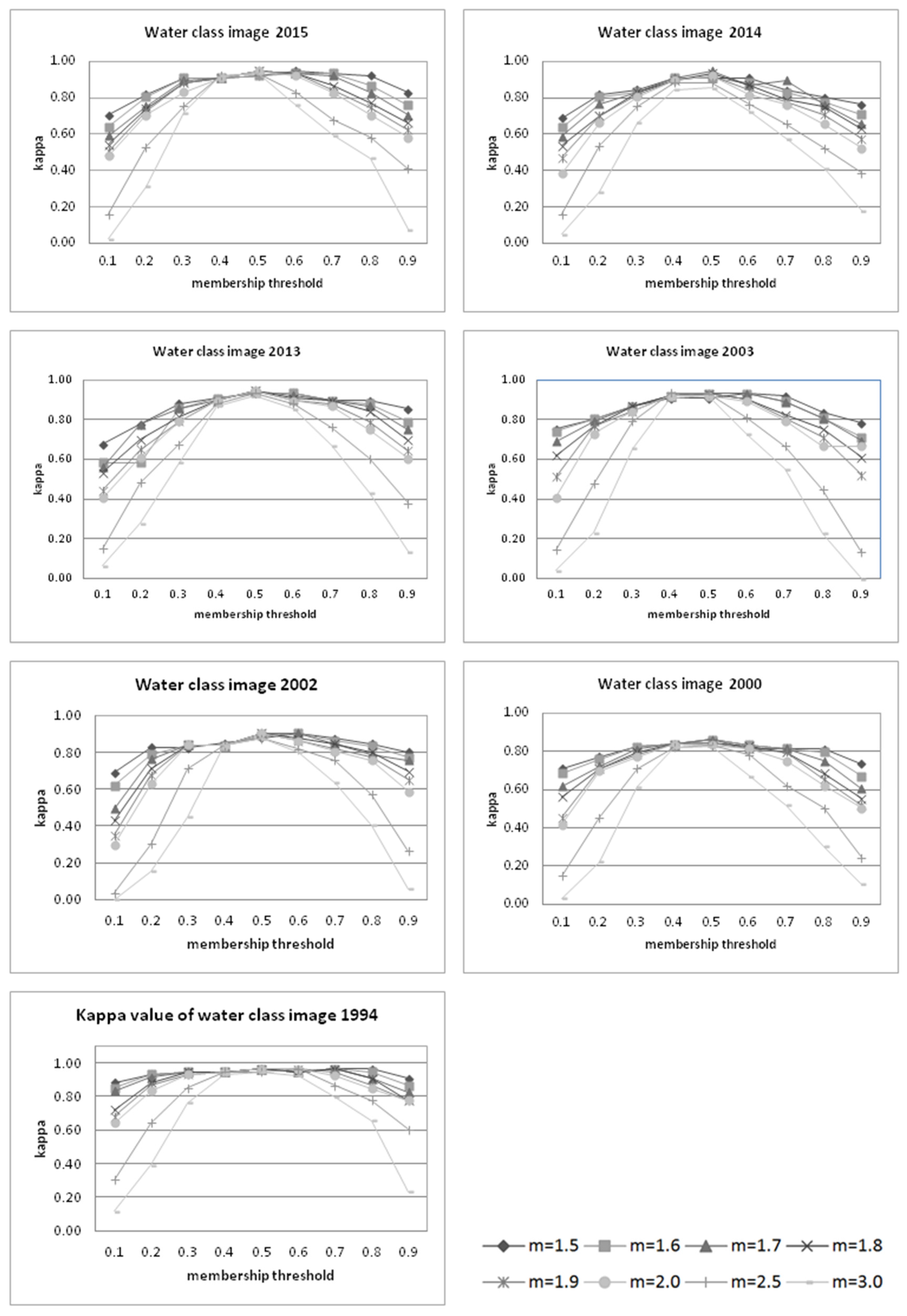
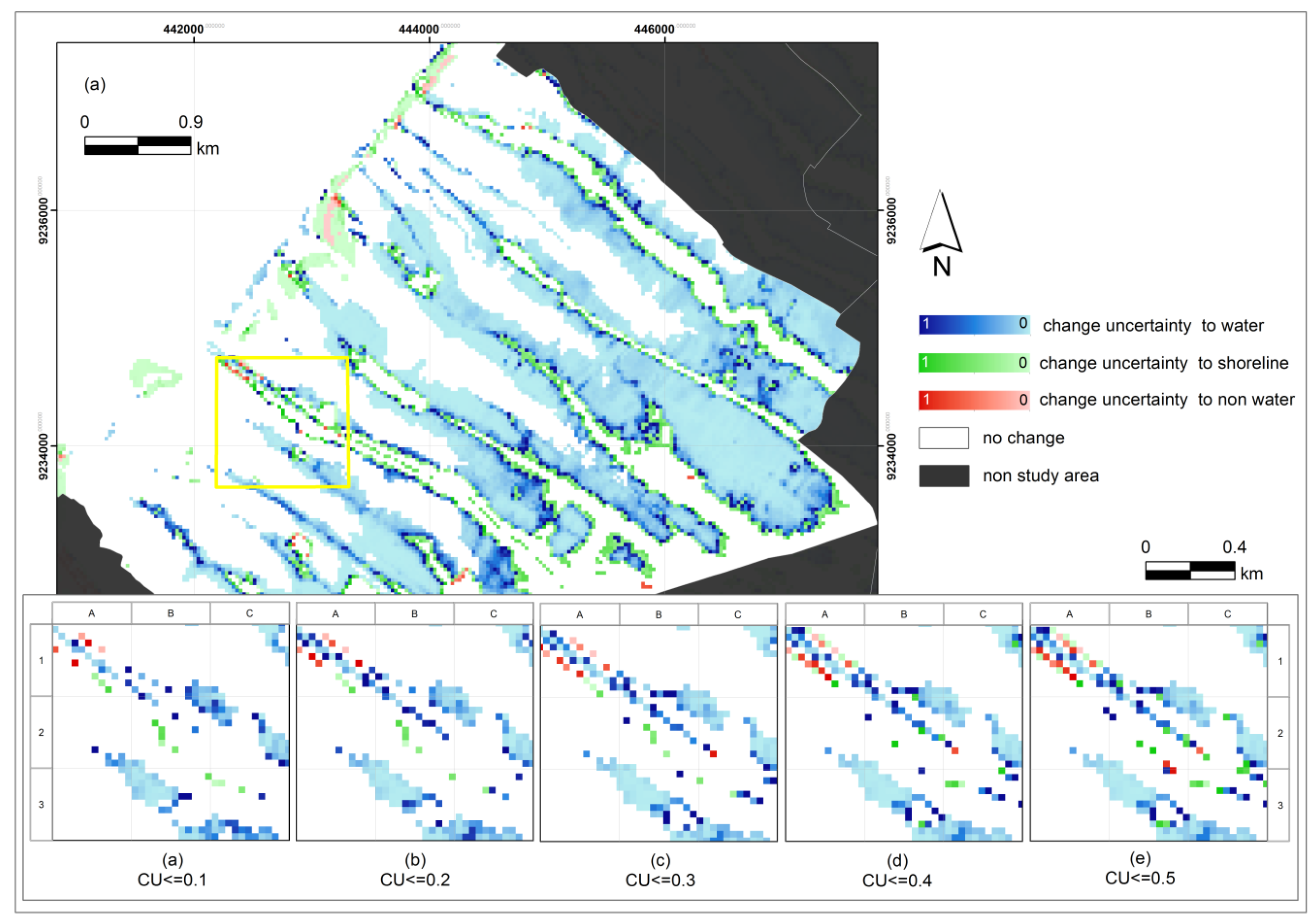
The shoreline change detection methods developed and applied in this research involved the generation of a shoreline and its uncertainty using selected m and t values, and produced a hard classification by means of thresholding. A variation in m values had little influence on the results of the classification. An important reason was the small changes in membership values obtained when m values were set between 1.5 and 3.0. Within that range, the change in membership value was generally less than 0.1. However, t variation strongly influenced the results. Small variations in t causing large variation in area indicate the presence of gradual boundaries, as for example in a muddy area. Meanwhile, sharp or sudden boundaries caused little change in area with varying t, such as at a steep coast or at the shoreline with embankment.
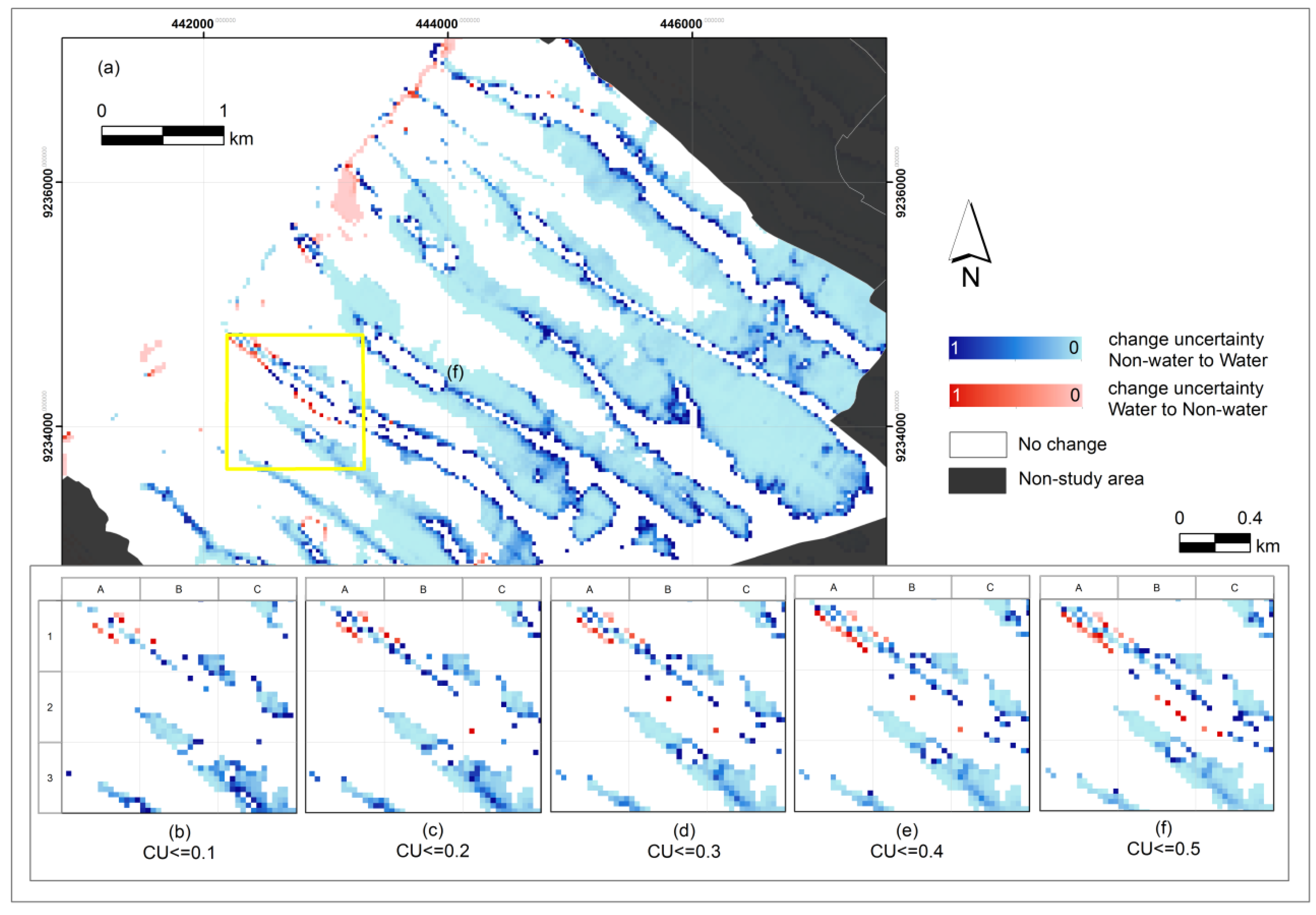
The change uncertainty value expresses how sure we are that a change really occurred. Therefore, the uncertainty addressed in this research corresponds to the existential uncertainty of the identified changes. A complete model of uncertainty, however, should also include an extensional uncertainty which considers the spatial extent of the change [
57]. This would involve modelling shoreline as a fuzzy object as proposed by Cheng [
51]. In fact, the membership and
t values of the
water class in this work may be used to represent
shoreline as a conditional boundary since spatial extents of
water (and
non-water) depend on the choice of
t value. In this case, points where
are the interior of fuzzy sub-areas (cores), whereas points with
would belong to transition zones and points with
belong to
non-water objects.
Analysis of shoreline changes in the study area in Sayung sub-district revealed an extensive change of shoreline with the largest change between 1994 and 2000. Land subsidence was indicated as one of the causes of this permanent submergence. Chaussard,
et al. [
58] mentioned that the rate of the land subsidence in this location reaches approximately 6.0 cm·year
−1. Subsidence was accelerated by an extreme ground water extraction for industrial purposes and as the consequence of a rapid population growth, classified as an anthropogenic subsidence. Putranto and Rüde [
59] cited the Directorate of Environmental Geology and Mining Regions of Indonesia, stating the number of registered deep wells in Semarang Demak in the early 1900s was only 16. The number of deep wells increased significantly up to 1194 in 2002. Besides, land subsidence was also triggered by a natural compaction of clayey sediment and settlement loading [
38,
58,
60]. Furthermore, the threat of flooding comes from sea level rise as well. As mentioned by Sofian [
61], the rise of sea level in Indonesia is approximately 0.2–1.0 cm·year
−1 with an average of 0.6 cm·year
−1.
Different planting periods in agricultural areas could be a major cause of the changes from
water and
shoreline to
non-water in the period 2000–2002 followed by a large reverse change in the period 2002–2003 (see
Table 5 and
Table 7). In addition, we identified coastal land reclamation activities to install an industrial area and a settlement in Sriwulan village. After the period 2003–2013, more agricultural areas were converted into fishponds as a result of expanding saltwater infiltration. On the other hand, some changes from
water to
non-water occurred as a result of a successful mangrove planting program which started in 2003.
The study area was located in a river delta formed from deposits carried by many rivers discharging into the Java Sea. The remarkable coastal inundation and erosion, which Sayung sub-district has faced for more than two decades, was probably also due to a change in sediment-carrying capacity of the longshore current [
62,
63]. This longshore current, generated by waves, exceeded the quantity of sediment supplied to the beach. Further, land use change in upstream areas resulted in an increase of erosion and water discharge in particular during rainy seasons, yielding more sediment to the downstream area. In fact, not all of this sediment could be discharged into the sea; some was deposited along the river bottom, irrigation canals, estuaries and other water bodies in its path. This led not only to the narrowing and to silting up of the canals and rivers, but also to the reduction of sediment supply to the littoral zone inducing coastal erosion. Moreover, massive coastal reclamation in a neighbouring area such as Terboyo industrial complex extended seaward after 1994, and Tanjung Emas Harbour first developed in 1985 could have changed currents and material transport along the coast in the study area as well. To prove that there were some influences of harbour development and beach reclamation to the severe inundation impact, however, is beyond the scope of this study.
5. Conclusions
This research presents two methods to identify shoreline positions: as a line and as a margin, including a measure of change uncertainty at different epochs. Both methods used FCM classification to determine partial membership of water and non-water. While shoreline changes can be detected by both methods, the shoreline as a margin provides a more detailed estimation of change area than the shoreline as a line. Moreover, by having shoreline as a margin, we can assess its spatial extent and measure its change uncertainty at different levels. Abrupt and gradual changes of shoreline were identified at an object level and the spatial distribution of uncertainty estimated at a pixel level.
Some challenges for the improvement of the method consist of: (1) including an extensional uncertainty and represent shoreline as a conditional boundary; (2) including seasonal condition in the selection of images; and (3) integrating the results with a digital elevation model. In addition, the integration with other datasets such as land use and land cover pattern, hydrological data and other information associated with the study area is important as well to have a better understanding of processes which influence the shoreline change.
Both methods have been successfully implemented in a coastal area in the Sayung sub-district in Java using a series of Landsat images. The change area estimation and its change uncertainty may support local government and other stakeholders in monitoring shoreline changes. Integrating the results with the distribution of elements at risk such as settlements and other important facilities can help to analyze which location needs to be prioritized in disaster response. For example, priority could be given to a change area from shoreline to water which has low change uncertainty value as it was obvious that shoreline has changed due to inundation or erosion. Priority could also be given, however, to the area with higher change uncertainty, for example if the location is a densely populated area. Continuous monitoring of shoreline changes in order to understand risks and to anticipate the potential impacts is highly important.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}