
High-Resolution Classification of South Patagonian Peat Bog Microforms Reveals Potential Gaps in Up-Scaled CH4 Fluxes by use of Unmanned Aerial System (UAS) and CIR Imagery

Abstract
:
1. Introduction
2. Material and Methods
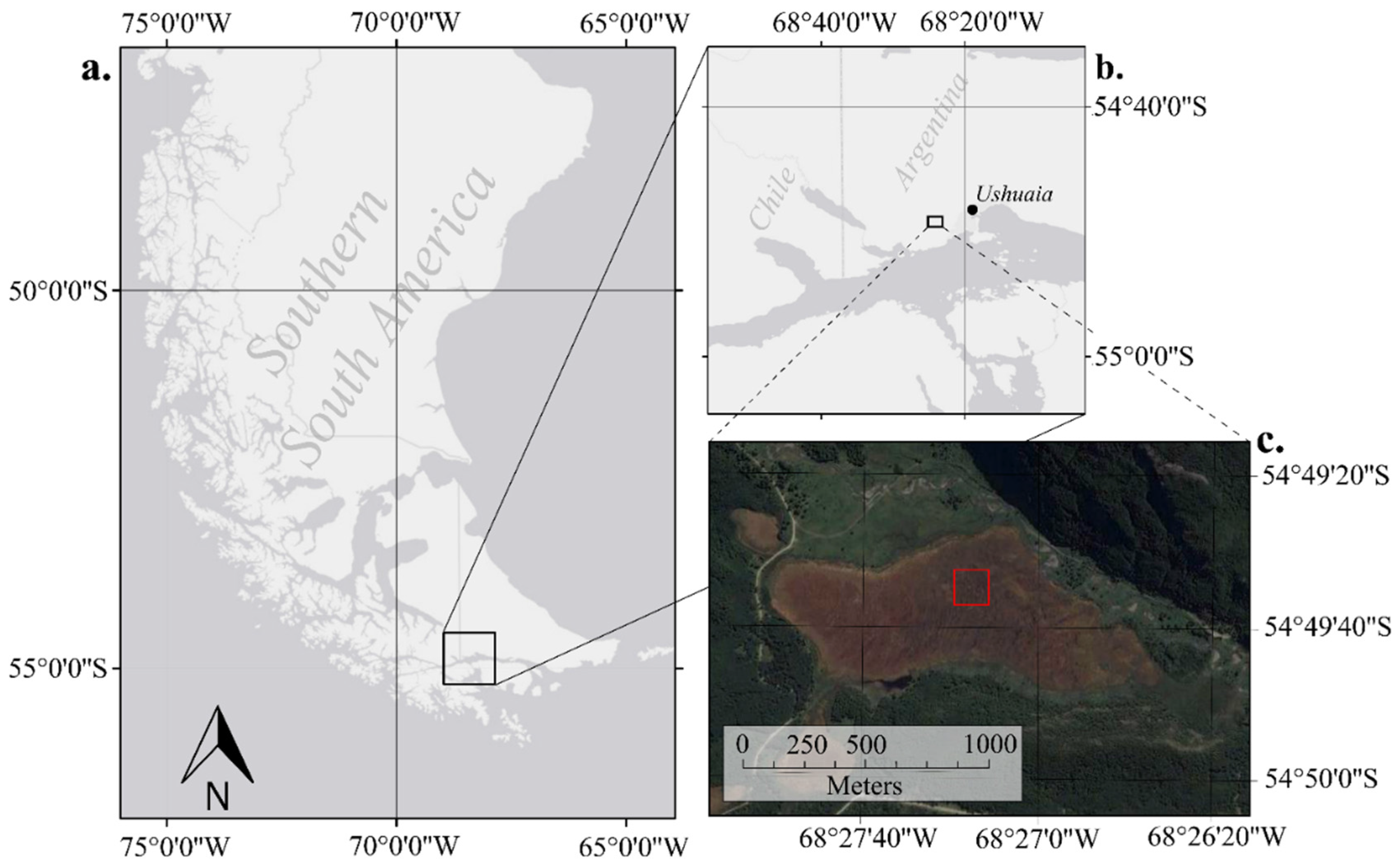
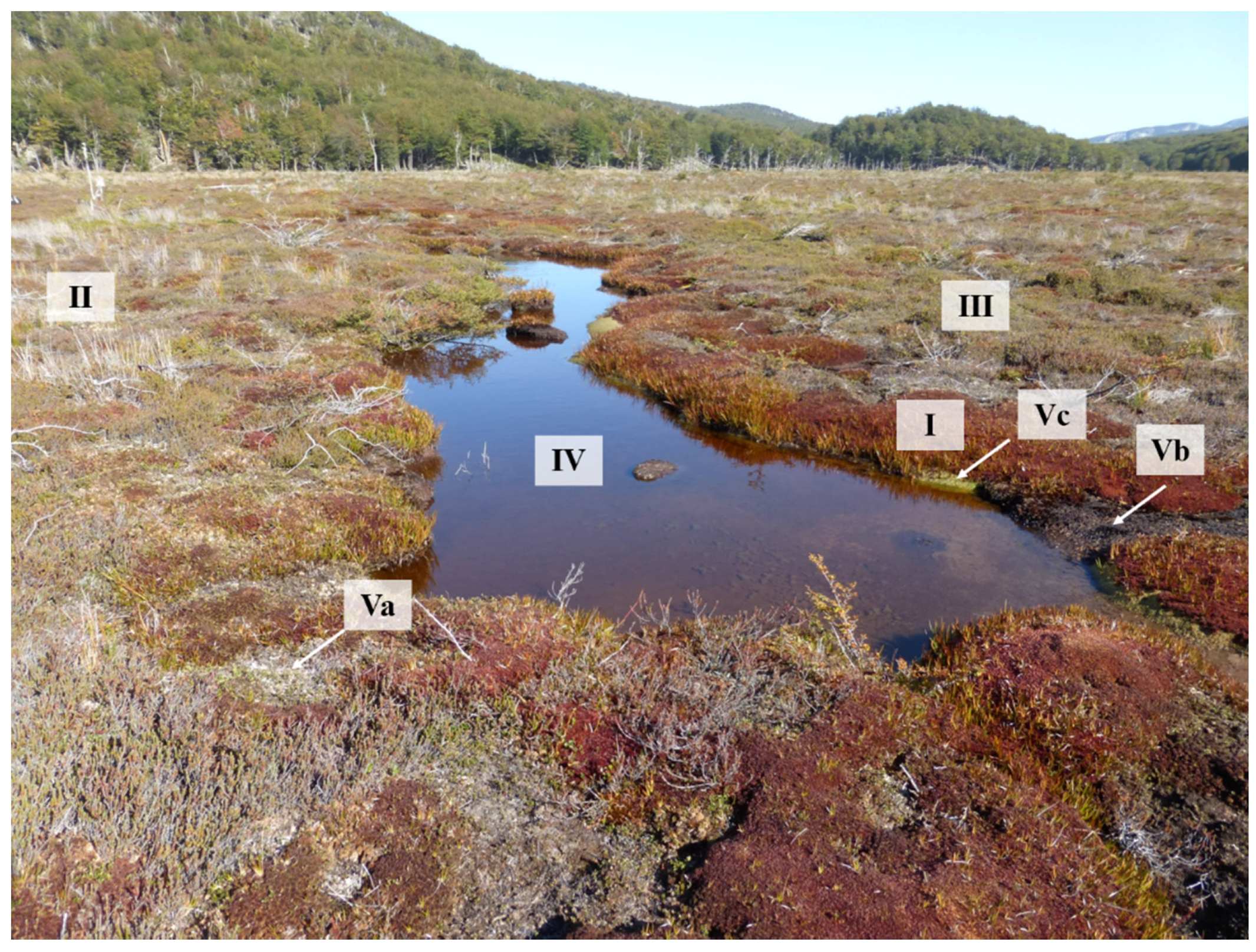
2.1. Site Description
2.2. Remote Sensing
2.2.1. UAS Platform and Sensor Technique
2.2.2. Image Acquisition
2.2.3. Data Processing and Object-Based Classification
2.3. Methane (CH4) Flux Measurements
3. Results
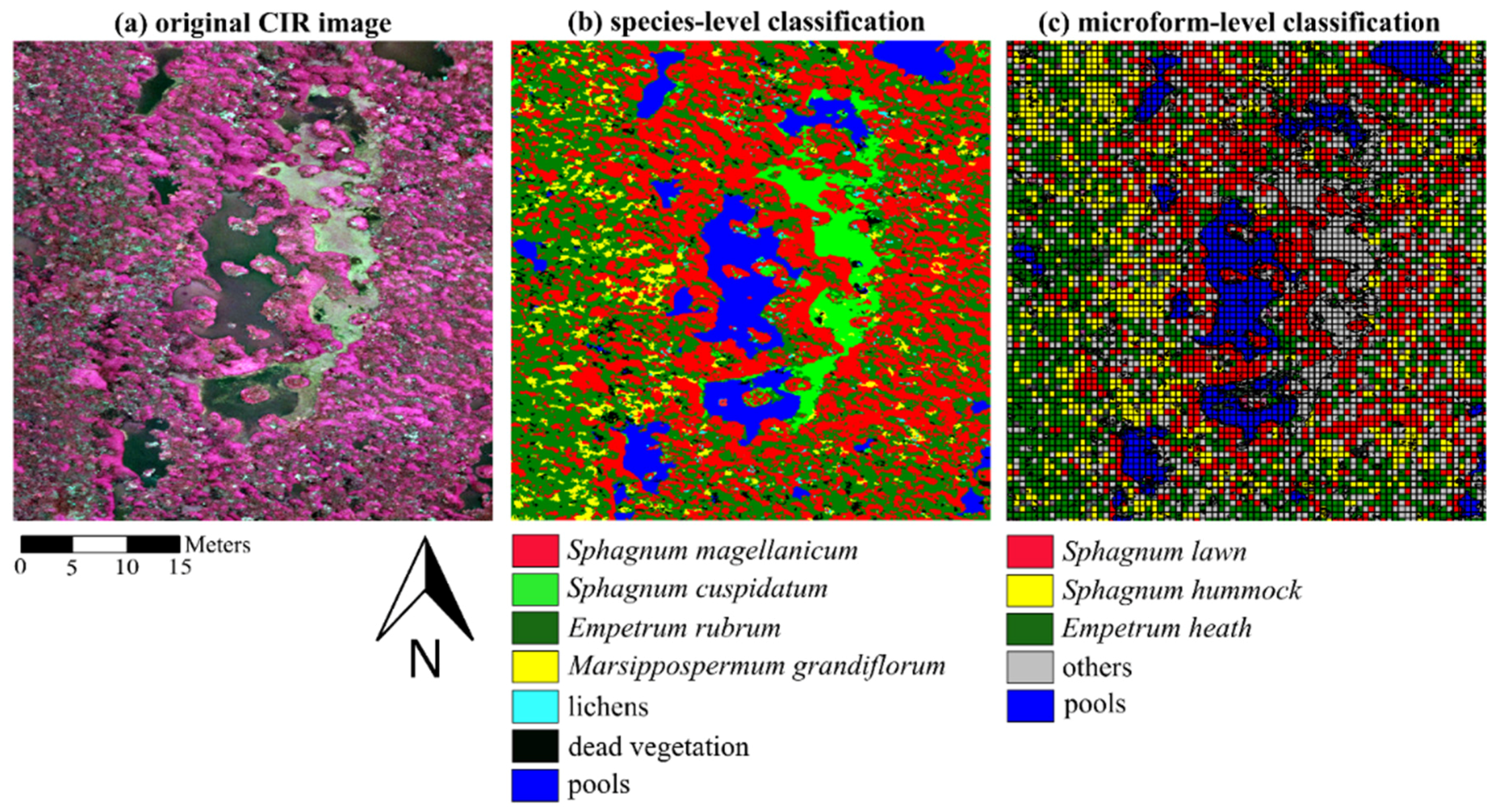
3.1. Object-Based Classification
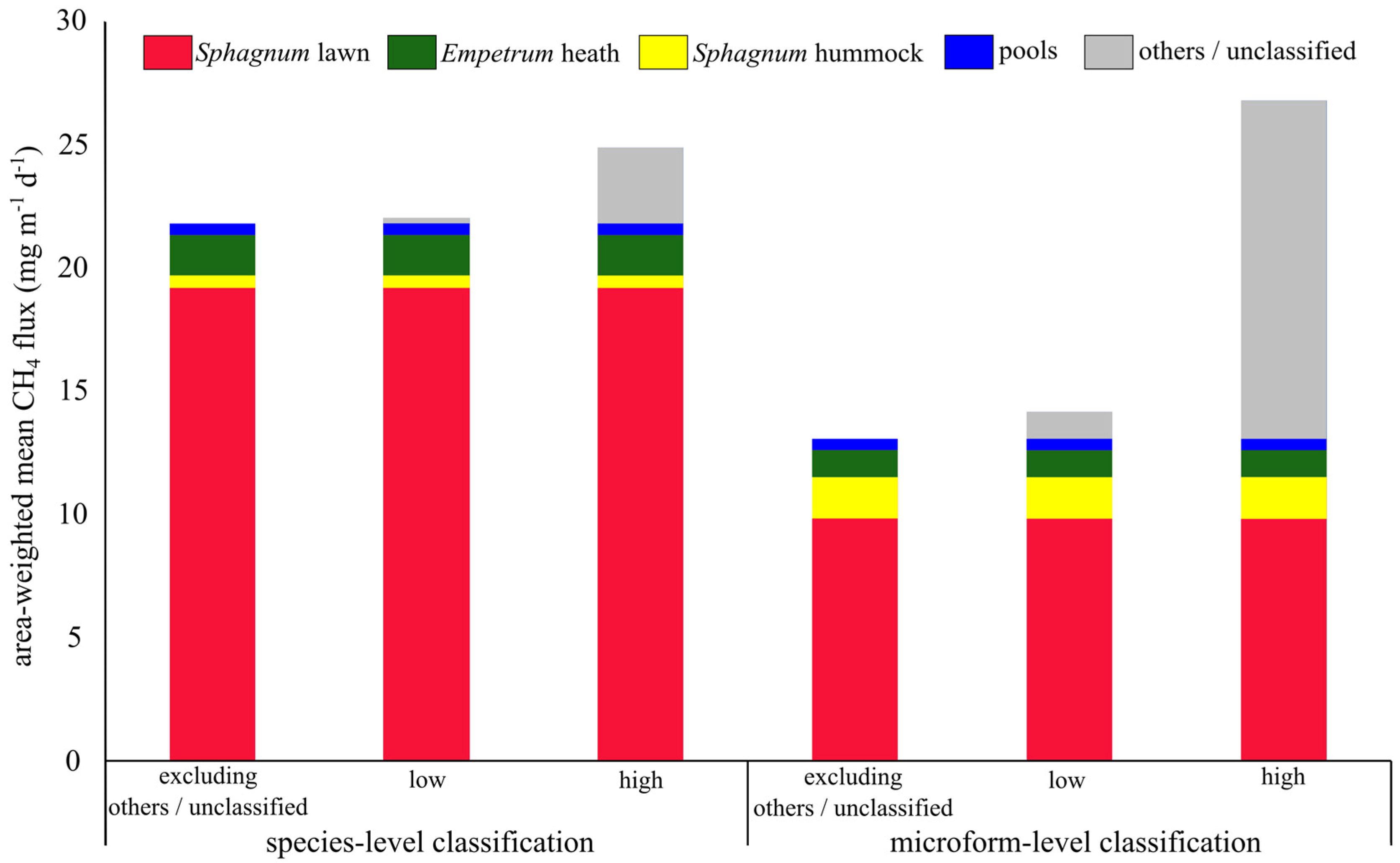
3.2. CH4 Fluxes
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gorham, E. Northern peatlands: Role in the carbon cycle and probable responses to climatic warming. Ecol. Appl. 1991, 1, 182–195. [Google Scholar] [CrossRef]
- Yu, Z.C. Northern peatland carbon stocks and dynamics: A review. Biogeosciences 2012, 9, 4071–4085. [Google Scholar] [CrossRef]
- Bridgham, S.D.; Cadillo-Quiroz, H.; Keller, J.K.; Zhuang, Q. Methane emissions from wetlands: Biogeochemical, microbial, and modeling perspectives from local to global scales. Glob. Chang. Biol. 2013, 19, 1325–1346. [Google Scholar] [CrossRef] [PubMed]
- Turetsky, M.R.; Kotowska, A.; Bubier, J.; Dise, N.B.; Crill, P.; Hornibrook, E.R.; Minkkinen, K.; Moore, T.R.; Myers-Smith, I.H.; Nykanen, H.; et al. A synthesis of methane emissions from 71 northern, temperate, and subtropical wetlands. Glob. Chang. Biol. 2014, 20, 2183–2197. [Google Scholar] [CrossRef] [PubMed]
- Blodau, C. Carbon cycling in peatlands—A review of processes and controls. Environ. Rev. 2002, 10, 111–134. [Google Scholar] [CrossRef]
- Limpens, J.; Berendse, F.; Blodau, C.; Canadell, J.G.; Freeman, C.; Holden, J.; Roulet, N.; Rydin, H.; Schaepman-Strub, G. Peatlands and the carbon cycle: From local processes to global implications—A synthesis. Biogeosciences 2008, 5, 1475–1491. [Google Scholar] [CrossRef]
- Lai, D.Y.F. Methane dynamics in Northern Peatlands: A Review. Pedosphere 2009, 19, 409–421. [Google Scholar] [CrossRef]
- Grootjans, J.; Iturraspe, R.; Fritz, C.; Moen, A.; Joosten, H. Mires and mire types of Peninsula Mitre, Tierra del Fuego, Argentina. Mires Peat 2014, 14, 1–20. [Google Scholar]
- Goodrich, J.P.; Campbell, D.I.; Roulet, N.T.; Clearwater, M.J.; Schipper, L.A. Overriding control of methane flux temporal variability by water table dynamics in a Southern Hemisphere, raised bog. J. Geophys. Res. Biogeosci. 2015, 120, 819–831. [Google Scholar] [CrossRef]
- Kleinebecker, T.; Hölzel, N.; Vogel, A. South Patagonian ombrotrophic bog vegetation reflects biogeochemical gradients at the landscape level. J. Veg. Sci. 2008, 19, 151–160. [Google Scholar] [CrossRef]
- Fritz, C.; Pancotto, V.A.; Elzenga, J.T.M.; Visser, E.J.W.; Grootjans, A.P.; Pol, A.; Iturraspe, R.; Roelofs, J.G.M.; Smolders, A.J.P. Zero methane emission bogs: Extreme rhizosphere oxygenation by cushion plants in Patagonia. New Phytol. 2011, 190, 398–408. [Google Scholar] [CrossRef] [PubMed]
- Kleinebecker, T.; HöLzel, N.; Vogel, A. Patterns and gradients of diversity in South Patagonian ombrotrophic peat bogs. Austral. Ecol. 2010, 35, 1–12. [Google Scholar] [CrossRef]
- Couwenberg, J.; Joosten, H. Self-organization in raised bog patterning: The origin of microtope zonation and mesotope diversity. J. Ecol. 2005, 93, 1238–1248. [Google Scholar] [CrossRef]
- Pihlatie, M.K.; Christiansen, J.R.; Aaltonen, H.; Korhonen, J.F.J.; Nordbo, A.; Rasilo, T.; Benanti, G.; Giebels, M.; Helmy, M.; Sheehy, J.; et al. Comparison of static chambers to measure CH4 emissions from soils. Agric. For. Meteorol. 2013, 171–172, 124–136. [Google Scholar] [CrossRef]
- Adam, E.; Mutanga, O.; Rugege, D. Multispectral and hyperspectral remote sensing for identification and mapping of wetland vegetation: A Review. Wetl. Ecol. Manag. 2010, 18, 281–296. [Google Scholar] [CrossRef]
- Thomas, V.; Treitz, P.; Jelinski, D.; Miller, J.; Lafleur, P.; McCaughey, J.H. Image classification of a northern peatland complex using spectral and plant community data. Remote Sens. Environ. 2003, 84, 83–99. [Google Scholar] [CrossRef]
- Mcmorrow, J.M.; Cutler, M.E.J.; Evans, M.G.; Al-Roichdi, A. Hyperspectral indices for characterizing upland peat composition. Int. J. Remote Sens. 2004, 25, 313–325. [Google Scholar] [CrossRef]
- Anderson, K.; Bennie, J.J.; Milton, E.J.; Hughes, P.D.M.; Lindsay, R.; Meade, R. Combining LiDAR and IKONOS data for eco-hydrological classification of an ombrotrophic peatland. J. Environ. Qual. 2010, 39, 260–273. [Google Scholar] [CrossRef] [PubMed]
- Bartsch, A.; Trofaier, A.M.; Hayman, G.; Sabel, D.; Schlaffer, S.; Clark, D.B.; Blyth, E. Detection of open water dynamics with ENVISAT ASAR in support of land surface modelling at high latitudes. Biogeosciences 2012, 9, 703–714. [Google Scholar] [CrossRef]
- Middleton, M.; Närhi, P.; Arkimaa, H.; Hyvönen, E.; Kuosmanen, V.; Treitz, P.; Sutinen, R. Ordination and hyperspectral remote sensing approach to classify peatland biotopes along soil moisture and fertility gradients. Remote Sens. Environ. 2012, 124, 596–609. [Google Scholar] [CrossRef]
- Gallant, A.L. The challenges of remote monitoring of wetlands. Remote Sens. 2015, 7, 10938–10950. [Google Scholar] [CrossRef]
- Crichton, K.A.; Anderson, K.; Bennie, J.J.; Milton, E.J. Characterizing peatland carbon balance estimates using freely available Landsat ETM+ data. Ecohydrology 2015, 8, 493–503. [Google Scholar] [CrossRef]
- Sirin, A.A.; Maslov, A.A.; Valyaeva, N.A.; Tsyganova, O.P.; Glukhova, T.V. Mapping of peatlands in the Moscow oblast based on high-resolution remote sensing data. Contemp. Probl. Ecol. 2015, 7, 808–814. [Google Scholar] [CrossRef]
- Becker, T.; Kutzbach, L.; Forbrich, I.; Schneider, J.; Jager, D.; Thees, B.; Wilmking, M. Do we miss the hot spots?—The use of very high resolution aerial photographs to quantify carbon fluxes in peatlands. Biogeosciences 2008, 5, 1387–1393. [Google Scholar] [CrossRef]
- Cole, B.; McMorrow, J.; Evans, M. Empirical modelling of vegetation abundance from airborne hyperspectral data for upland peatland restoration monitoring. Remote Sens. 2014, 6, 716–739. [Google Scholar] [CrossRef]
- Knoth, C.; Klein, B.; Prinz, T.; Kleinebecker, T. Unmanned aerial vehicles as innovative remote sensing platforms for high-resolution infrared imagery to support restoration monitoring in cut-over bogs. Appl. Veg. Sci. 2013, 16, 509–517. [Google Scholar] [CrossRef]
- Lucieer, A.; Turner, D.; King, D.H.; Robinson, S.A. Using an Unmanned Aerial Vehicle (UAV) to capture micro-topography of Antarctic moss beds. Int. J. Appl. Earth Obs. Geoinf. 2014, 27, 53–62. [Google Scholar] [CrossRef]
- Kalacska, M.; Arroyo-Mora, J.P.; de Gea, J.; Snirer, E.; Herzog, C.; Moore, T.R. Videographic analysis of eriophorum vaginatum spatial coverage in an ombotrophic bog. Remote Sens. 2013, 5, 6501–6512. [Google Scholar] [CrossRef]
- Getzin, S.; Nuske, R.S.; Wiegand, K. Using Unmanned Aerial Vehicles (UAV) to quantify spatial gap patterns in forests. Remote Sens. 2014, 6, 6988–7004. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. Development of an Unmanned Aerial Vehicle (UAV) for hyper resolution vineyard mapping based on visible, multispectral, and thermal imagery. In Proceedings of the 34th International Symposium on Remote Sensing of Environment, Sydney, Australia, 10–15 April 2011.
- Turner, D.; Lucieer, A.; de Jong, S.M. Time series analysis of landslide dynamics using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Von Bueren, S.K.; Burkart, A.; Hueni, A.; Rascher, U.; Tuohy, M.P.; Yule, I.J. Deploying four optical UAV-based sensors over grassland: Challenges and Limitations. Biogeosciences 2015, 12, 163–175. [Google Scholar] [CrossRef]
- Rango, A.; Laliberte, A.; Havstad, K.; Winters, C.; Steele, C.; Browning, D. Rangeland Resource Assessment, Monitoring, and Management Using Unmanned Aerial Vehicle-Based Remote Sensing. In Proceedings of the 2010 IEEE International, Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 608–611.
- Lehmann, J.R.K.; Nieberding, F.; Prinz, T.; Knoth, C. Analysis of unmanned aerial system-based CIR images in forestry—A new perspective to monitor pest infestation levels. Forests 2015, 6, 594–612. [Google Scholar] [CrossRef]
- Ihse, M. Colour infrared aerial photography as a tool for vegetation mapping and change detection in environmental studies of Nordic ecosystems: A Review. Nor. Geogr. Tidsskr. 2007, 61, 170–191. [Google Scholar] [CrossRef]
- Kleinebecker, T.; Holzel, N.; Vogel, A. Gradients of continentality and moisture in South Patagonian ombrotrophic peatland vegetation. Folia Geobot. 2007, 42, 363–382. [Google Scholar] [CrossRef]
- Aber, J.S.; Marzolff, I.; Ries, J.B. Small-Format Aerial Photography: Principles, Techniques and Geoscience Applications; Elsevier Science: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Laliberte, A.; Rango, A. Image processing and classification procedures for analysis of sub-decimeter imagery acquired with an unmanned aircraft over arid rangelands. GISci. Remote Sens. 2011, 48, 4–23. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Ozdemir Ibrahim, D.A.N. Estimation of tree size diversity using object oriented texture analysis and aster imagery. Sensors 2008, 8, 4709–4724. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data—Principles and Practices, 2nd ed.; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2009. [Google Scholar]
- Landis, J.R.; Koch, G.G. The measurement of observer agreement for categorical data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [PubMed]
- Kutzbach, L.; Schneider, J.; Sachs, T.; Giebels, M.; Nykanen, H.; Shurpali, N.J.; Martikainen, P.J.; Alm, J.; Wilmking, M. CO2 flux determination by closed-chamber methods can be seriously biased by inappropriate application of linear regression. Biogeosciences 2007, 4, 1005–1025. [Google Scholar] [CrossRef]
- Broder, T.; Blodau, C.; Biester, H.; Knorr, K.H. Sea spray, trace elements, and decomposition patterns as possible constraints on the evolution of CH4 and CO2 concentrations and isotopic signatures in oceanic ombrotrophic bogs. Biogeochemistry 2014, 122, 327–342. [Google Scholar] [CrossRef]
- Segers, R. Methane production and methane consumption: A review of processes underlying wetland methane fluxes. Biogeochemistry 1998, 41, 23–51. [Google Scholar] [CrossRef]
- Korpela, I.; Koskinen, M.; Vasander, H.; Holopainen, M.; Minkkinen, K. Airborne small-footprint discrete-return LiDAR data in the assessment of boreal mire surface patterns, vegetation, and habitats. For. Ecol. Manag. 2009, 258, 1549–1566. [Google Scholar] [CrossRef]
- Grayson, R.; Holden, J.; Jones, R.R.; Carle, J.A.; Lloyd, A.R. Improving particulate carbon loss estimates in eroding peatlands through the use of terrestrial laser scanning. Geomorphology 2012, 179, 240–248. [Google Scholar] [CrossRef]
- Millard, K.; Richardson, M. Wetland mapping with LiDAR derivatives, SAR polarimetric decompositions, and LiDAR-SAR fusion using a random forest classifier. Can. J. Remote Sens. 2013, 39, 290–307. [Google Scholar] [CrossRef]
- Al-Rawabdeh, A.; He, F.; Mousaa, A.; El-Sheimy, N.; Habib, A. Using an unmanned aerial vehicle-based digital imaging system to derive a 3D point cloud for landslide scarp recognition. Remote Sens. 2016, 8, 95. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A Review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision UAV estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef]
- Skarlatos, D.P.; Vlachos, M.; Vamvakousis, V. Investigating influence of UAV flight patterns in multi-stereo view DSM accuracy. Proc. SPIE 2015, 9528. [Google Scholar] [CrossRef]
- Ruzgiene, B.; Berteška, T.; Gečyte, S.; Jakubauskiene, E.; Aksamitauskas, V.Č. The surface modelling based on UAV Photogrammetry and qualitative estimation. Meas. J. Int. Meas. Confed. 2015, 73, 619–627. [Google Scholar] [CrossRef]
- Pavelka, K.; Šedina, J. Creating of DSM based on RPAS measurement and accuracy testing. In Surface Models for Geoscience, 1st ed.; Růžičková, K., Inspektor, T., Eds.; Springer International Publishing: New York, NY, USA, 2015; Volume 211, pp. 173–188. [Google Scholar]
- Ai, M.; Hu, Q.; Li, J.; Wang, M.; Yuan, H.; Wang, S. A robust photogrammetric processing method of low-altitude UAV images. Remote Sens. 2015, 7, 2302–2333. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppa, J.; Jaakkola, A. Mini-UAV-borne LIDAR for fine-scale mapping. IEEE Geosci. Remote Sens. Lett. 2011, 8, 426–430. [Google Scholar] [CrossRef]
- Chang, C.-I. Hyperspectral Data Exploitation: Theory and Applications; John Wiley & Sons: New York, NY, USA, 2007. [Google Scholar]
- Trias-Sanz, R.; Stamon, G.; Louchet, J. Using colour, texture, and hierarchial segmentation for high-resolution remote sensing. ISPRS J. Photogramm. Remote Sens. 2008, 63, 156–168. [Google Scholar]
- Drăguţ, L.; Tiede, D.; Levick, S.R. ESP: A tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]
- Drăguţ, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated parameterisation for multi-scale image segmentation on multiple layers. ISPRS J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [PubMed]
- Martha, T.R.; Kerle, N.; van Westen, C.J.; Jetten, V.; Kumar, K.V. Segment optimization and data-driven thresholding for knowledge-based landslide detection by object-based image analysis. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4928–4943. [Google Scholar] [CrossRef]
- Stumpf, A.; Kerle, N. Object-oriented mapping of landslides using random forests. Remote Sens. Environ. 2011, 115, 2564–2577. [Google Scholar] [CrossRef]
- Peña, J.M.; Torres-Sánchez, J.; de Castro, A.I.; Kelly, M.; López-Granados, F. Weed mapping in early-season maize fields using object-based analysis of Unmanned Aerial Vehicle (UAV) images. PLoS ONE 2013, 8, e77151. [Google Scholar]
- Laliberte, A.S.; Browning, D.M.; Herrick, J.E.; Gronemeyer, P. Hierarchical object-based classification of ultra-high-resolution Digital Mapping Camera (DMC) imagery for rangeland mapping and assessment. J. Spat. Sci. 2010, 55, 101–115. [Google Scholar] [CrossRef]
- Hartley, I.P.; Hill, T.C.; Wade, T.J.; Clement, R.J.; Moncrieff, J.B.; Prieto-Blanco, A.; Disney, M.I.; Huntley, B.; Williams, M.; Howden, N.J.K.; et al. Quantifying landscape-level methane fluxes in subarctic Finland using a multiscale approach. Glob. Chang. Biol. 2015, 21, 3712–3725. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | Microform | ||||
|---|---|---|---|---|---|
| Sphagnum Lawn | Sphagnum Hummock | Empetrum Heath | Intermediate Hummock | Pools | |
| Sphagnum magellanicum | 95 | 40 | <5 | 80 | 0 |
| Sphagnum cuspidatum | 0 | 0 | 0 | 0 | (80) |
| Empetrum rubrum | <5 | 45 | 90 | 20 | 0 |
| Marsippospermum grandiflorum | 0 | 5 | 0 | <5 | 0 |
| litter Marsippospermum grandiflorum | 0 | 10 | 0 | <5 | 0 |
| lichens | 0 | <5 | 5 | <5 | 0 |
| Microdrone MD 4–200 | Manufacturer: Microdrones GmbH, Siegen, Germany |
|---|---|
| Type | Four-propeller powered multicopter |
| Dimension | 540 mm from rotor-hub to rotor-hub |
| Weight | 800 g (depending on configuration) |
| Engine power | 4× flat core motors |
| Payload | max. 250 g |
| Flight mode | Automatic with waypoint navigation or radio control |
| Endurance | up to 30 min (depending on load/wind/battery) |
| Customized |
| NDVImod: |
| TVI: |
| Layer Values |
| HSI Transformation Intensity (R = nir, G = green, B = blue) |
| HSI Transformation Hue (R = nir, G = green, B = blue) |
| HSI Transformation Saturation (R = nir, G = green, B = blue) |
| Mean NIR |
| Mean Green |
| Mean Blue |
| Mean Brightness |
| Standard Deviation NIR |
| Standard Deviation Green |
| Standard Deviation Blue |
| Texture |
| GLCM Homogeneity |
| GLCM Entropy |
| GLCM Mean |
| GLDV Entropy |
| Class Related Features |
| Relative border to neighbor objects |
| Relative area of sub-objects |
| Class | Image Example | Key Features and Thresholds |
|---|---|---|
| Pools |  | HSI Transformation Intensity (R = nir, G = green, B = blue) ≤ 0.57 GLCM Homogeneity (quick 8\11) (all dir.) ≥ 0.37 GLCM Entropy (quick 8\11) (all dir.) ≥ 4.3 |
| Sphagnum magellanicum |  | HSI Transformation Intensity (R = nir, G = green, B = blue) > 0.5 |
| Sphagnum cuspidatum |  | TVI > 5000 |
| Lichens (white) |  | GLDV Entropy (quick 8\11) (all dir.) ≥ 2.3 |
| Dead vegetation |  | GLCM Mean (quick8\11) (all dir.) ≤ 50 |
| Marsippospermum grandiflorum (shoots) |  | NDVImod ≤ 0.46 Mean green < 36 |
| Empetrum rubrum |  | Mean nir ≥ 85 |
| Species-Level | Pools | Sphagnum magellanicum | Sphagnum cuspidatum | Lichens | Dead Vegetation | Empetrum rubrum | Marsippospermum grandiflorum |
|---|---|---|---|---|---|---|---|
| pools | 217 | 0 | 7 | 0 | 2 | 0 | 0 |
| Sphagnum magellanicum | 1 | 304 | 0 | 6 | 0 | 2 | 43 |
| Sphagnum cuspidatum | 0 | 0 | 225 | 32 | 0 | 0 | 0 |
| lichens | 0 | 0 | 0 | 188 | 0 | 0 | 3 |
| dead vegetation | 4 | 0 | 0 | 0 | 211 | 0 | 0 |
| Empetrum rubrum | 2 | 2 | 7 | 0 | 4 | 240 | 18 |
| Marsippospermum grandiflorum | 0 | 0 | 0 | 3 | 0 | 4 | 206 |
| unclassified | 1 | 0 | 2 | 0 | 4 | 0 | 0 |
| Sum | 225 | 306 | 241 | 229 | 221 | 246 | 270 |
| Producer’s accuracy | 96.4 | 99.3 | 93.3 | 82.1 | 95.4 | 97.5 | 76.3 |
| User’s accuracy | 96.0 | 85.4 | 87.5 | 98.4 | 98.1 | 87.9 | 96.7 |
| Overall accuracy | 91.5 | ||||||
| KIA Per Class | 0.96 | 0.99 | 0.92 | 0.80 | 0.95 | 0.97 | 0.73 |
| KIA | 0.90 |
| Microform-Level | Pools | Sphagnum Hummock | Empetrum Heath | Sphagnum Lawn | Others |
|---|---|---|---|---|---|
| pools | 225 | 0 | 0 | 0 | 2 |
| Sphagnum hummock | 0 | 175 | 26 | 6 | 2 |
| Empetrum heath | 1 | 23 | 205 | 5 | 11 |
| Sphagnum lawn | 4 | 5 | 0 | 272 | 1 |
| others | 6 | 12 | 1 | 7 | 254 |
| unclassified | 1 | 32 | 24 | 0 | 12 |
| Sum | 237 | 247 | 256 | 290 | 282 |
| Producer’s accuracy | 94.9 | 70.8 | 80.0 | 93.8 | 90.0 |
| User’s accuracy | 99.1 | 83.7 | 83.6 | 96.4 | 90.7 |
| Overall accuracy | 86.2 | ||||
| KIA per Class | 0.94 | 0.65 | 0.76 | 0.92 | 0.87 |
| KIA | 0.83 |
| Surface Microform | N | Mean CH4 Flux (mg·m−2·d−1) |
|---|---|---|
| Sphagnum lawn | 21 | 49.04 ± 25.67 |
| Sphagnum hummock | 21 | 10.49 ± 6.02 |
| Empetrum heath | 21 | 3.97 ± 2.99 |
| pools | 7 | 5.41 ± 5.98 |
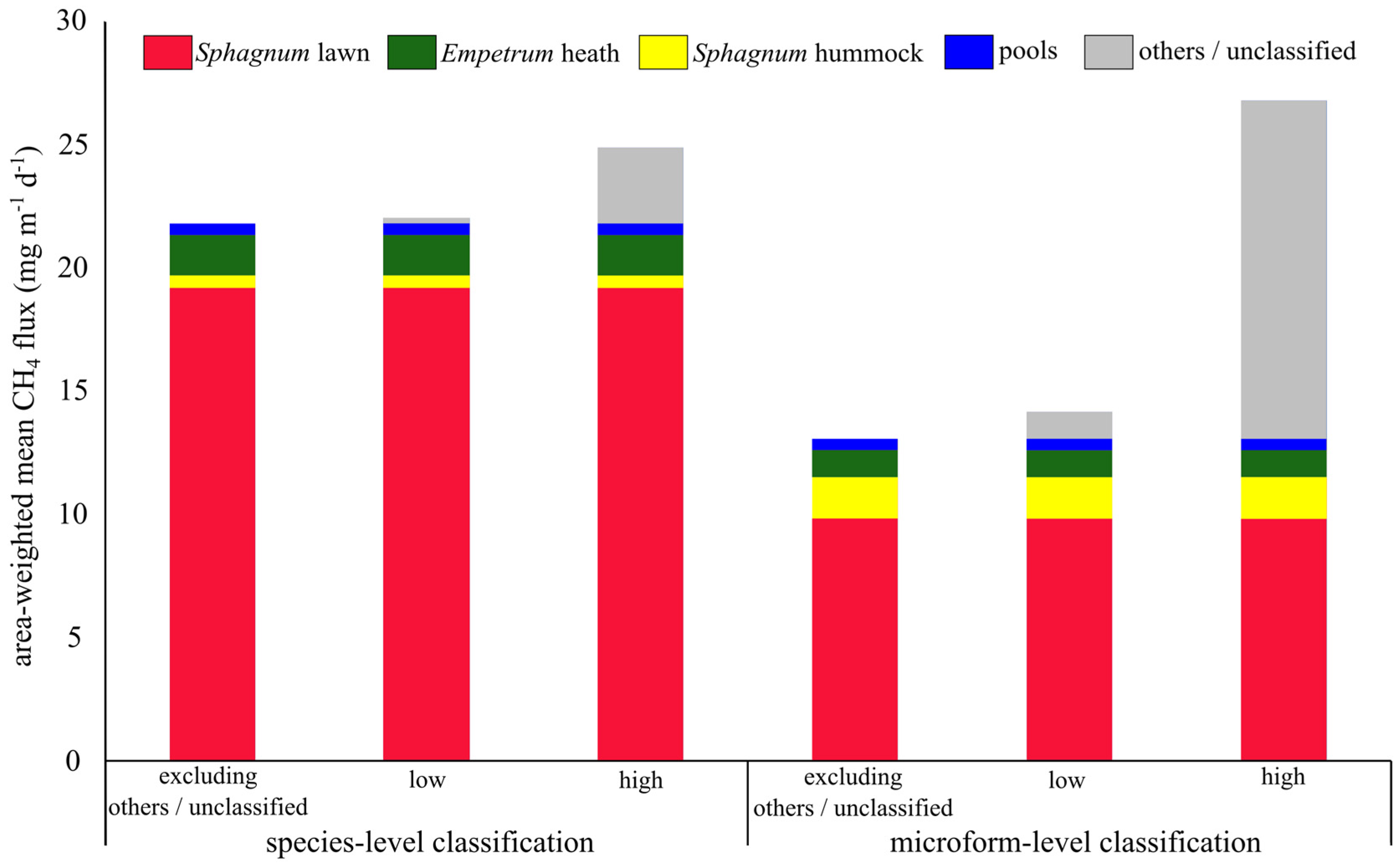
| Surface Microform | Species-Level Classification | Microform-Level Classification | ||
|---|---|---|---|---|
| Area (%) | Area-Weighted Mean CH4 Flux (mg·m−2·day−1) | Area (%) | Area-Weighted Mean CH4 Flux (mg·m−2·day−1) | |
| Sphagnum lawn | 39 | 19.2 ± 10.0 | 20 | 9.8 ± 5.1 |
| Sphagnum hummock | 5 | 0.5 ± 0.3 | 16 | 1.7 ± 1.0 |
| Empetrum heath | 41 | 1.6 ± 1.2 | 27 | 1.1 ± 0.8 |
| pools | 9 | 0.5 ± 0.5 | 9 | 0.5 ± 0.5 |
| unclassified/others | 6 | x | 28 | x |
| Sum | 100 | 21.8 ± 12.1 | 100 | 13.1 ± 7.4 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lehmann, J.R.K.; Münchberger, W.; Knoth, C.; Blodau, C.; Nieberding, F.; Prinz, T.; Pancotto, V.A.; Kleinebecker, T. High-Resolution Classification of South Patagonian Peat Bog Microforms Reveals Potential Gaps in Up-Scaled CH4 Fluxes by use of Unmanned Aerial System (UAS) and CIR Imagery. Remote Sens. 2016, 8, 173. https://doi.org/10.3390/rs8030173
Lehmann JRK, Münchberger W, Knoth C, Blodau C, Nieberding F, Prinz T, Pancotto VA, Kleinebecker T. High-Resolution Classification of South Patagonian Peat Bog Microforms Reveals Potential Gaps in Up-Scaled CH4 Fluxes by use of Unmanned Aerial System (UAS) and CIR Imagery. Remote Sensing. 2016; 8(3):173. https://doi.org/10.3390/rs8030173
Chicago/Turabian StyleLehmann, Jan R. K., Wiebke Münchberger, Christian Knoth, Christian Blodau, Felix Nieberding, Torsten Prinz, Verónica A. Pancotto, and Till Kleinebecker. 2016. "High-Resolution Classification of South Patagonian Peat Bog Microforms Reveals Potential Gaps in Up-Scaled CH4 Fluxes by use of Unmanned Aerial System (UAS) and CIR Imagery" Remote Sensing 8, no. 3: 173. https://doi.org/10.3390/rs8030173
APA StyleLehmann, J. R. K., Münchberger, W., Knoth, C., Blodau, C., Nieberding, F., Prinz, T., Pancotto, V. A., & Kleinebecker, T. (2016). High-Resolution Classification of South Patagonian Peat Bog Microforms Reveals Potential Gaps in Up-Scaled CH4 Fluxes by use of Unmanned Aerial System (UAS) and CIR Imagery. Remote Sensing, 8(3), 173. https://doi.org/10.3390/rs8030173