
MAPSM: A Spatio-Temporal Algorithm for Merging Soil Moisture from Active and Passive Microwave Remote Sensing


 ,
,  ,
, 
Simple Summary
- -
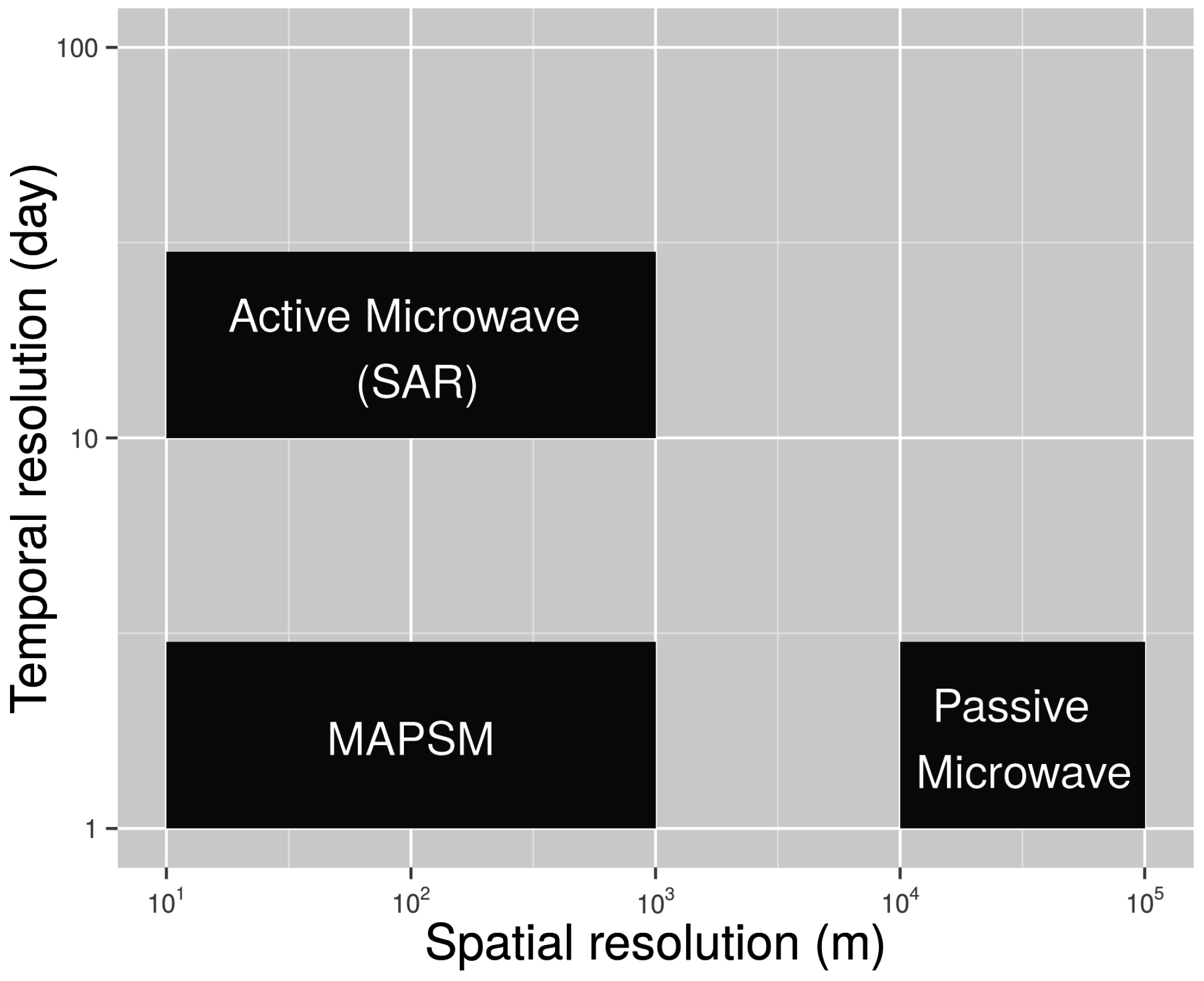
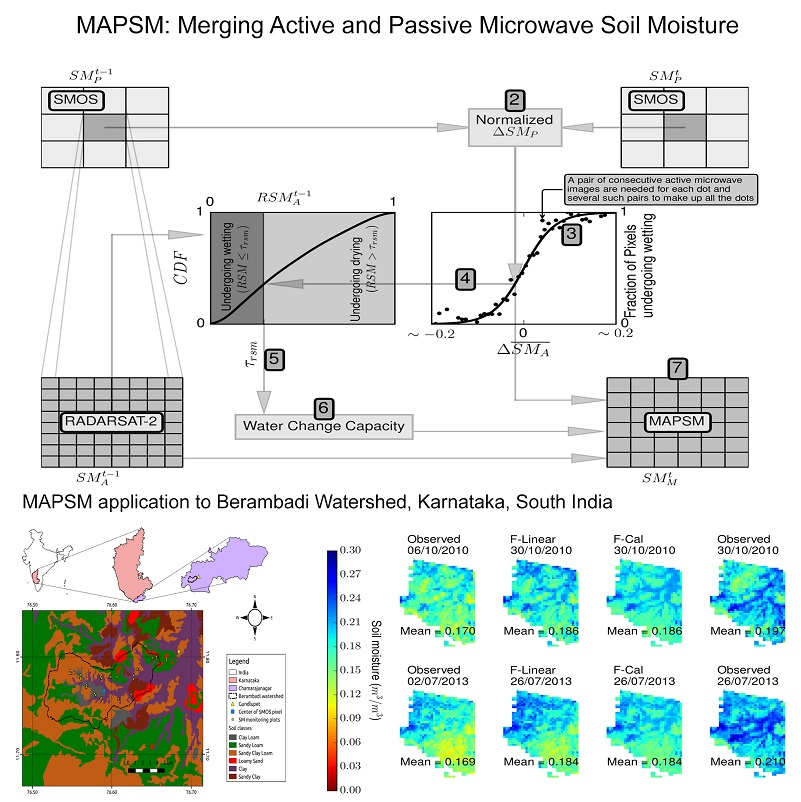
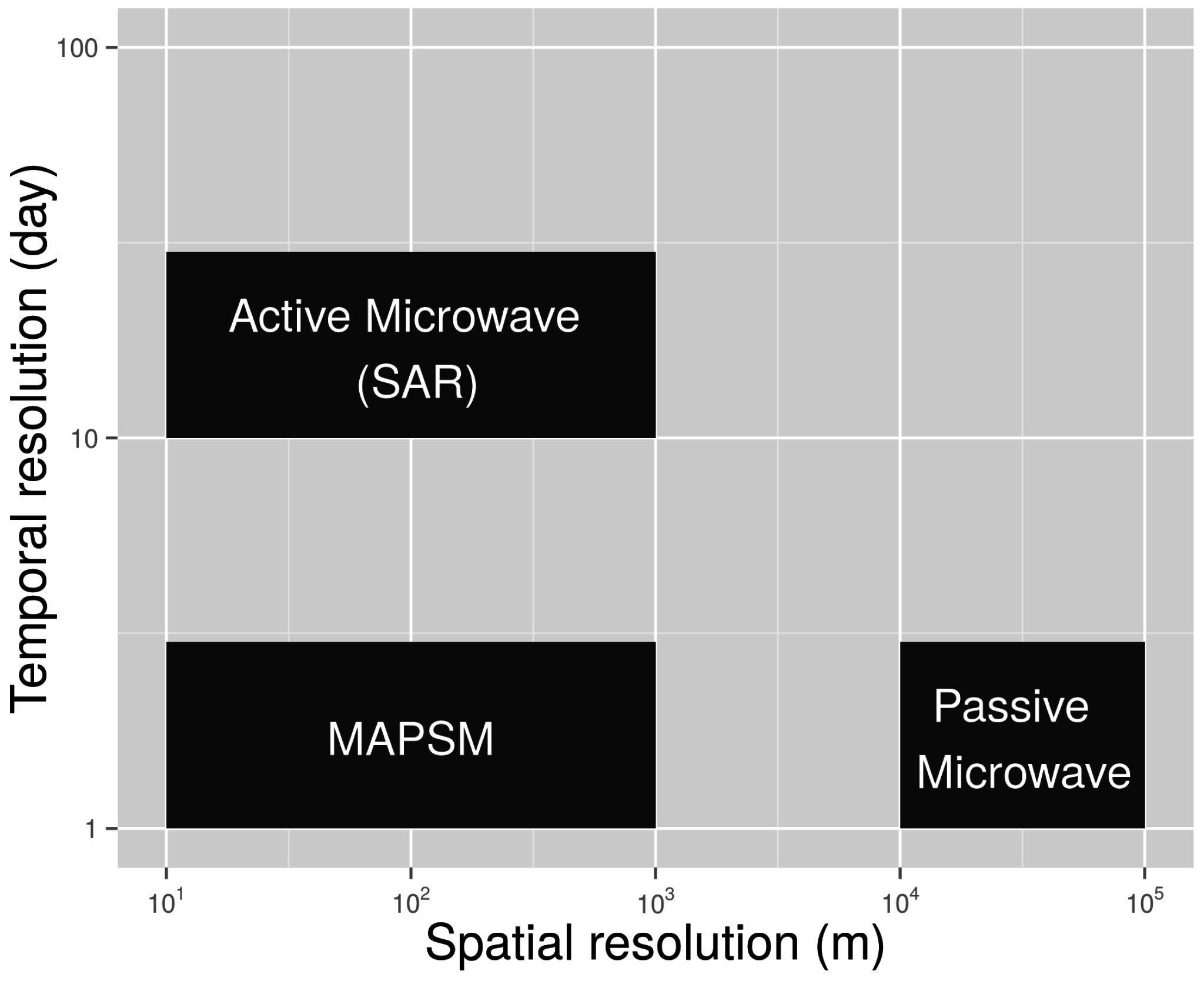
- A novel algorithm delivering high resolution soil moisture maps is developed by merging active (SAR) and passive microwave.
- -
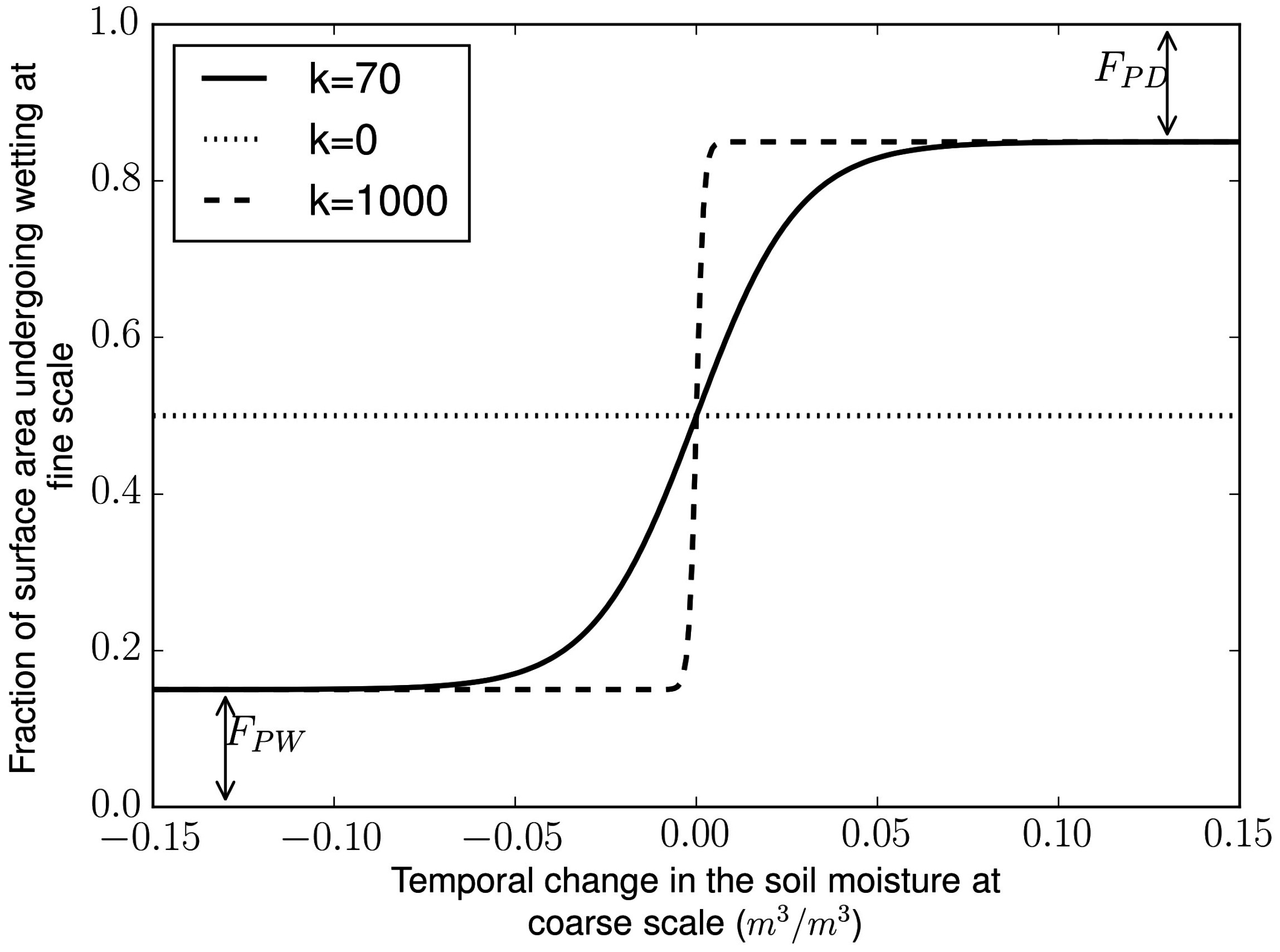
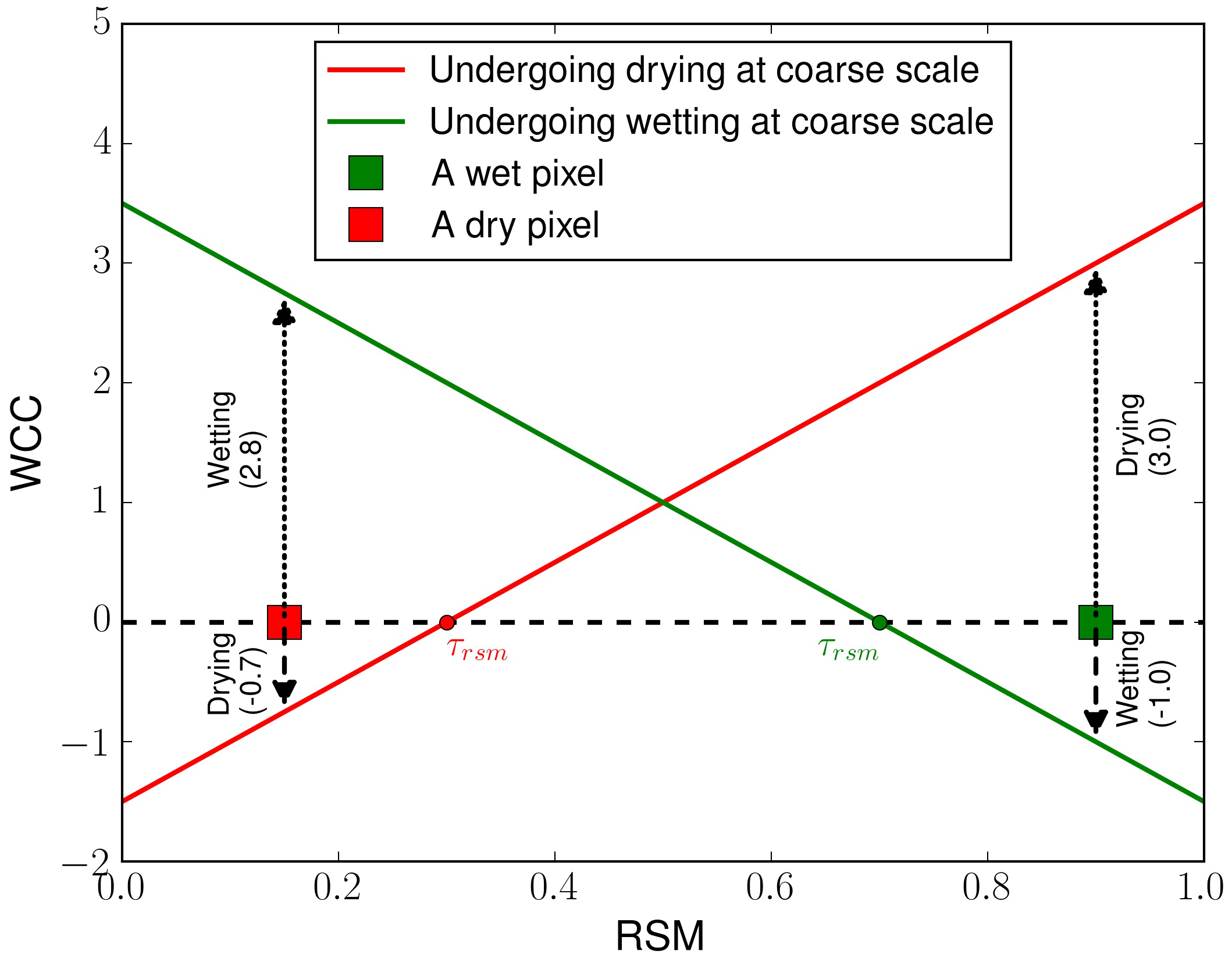
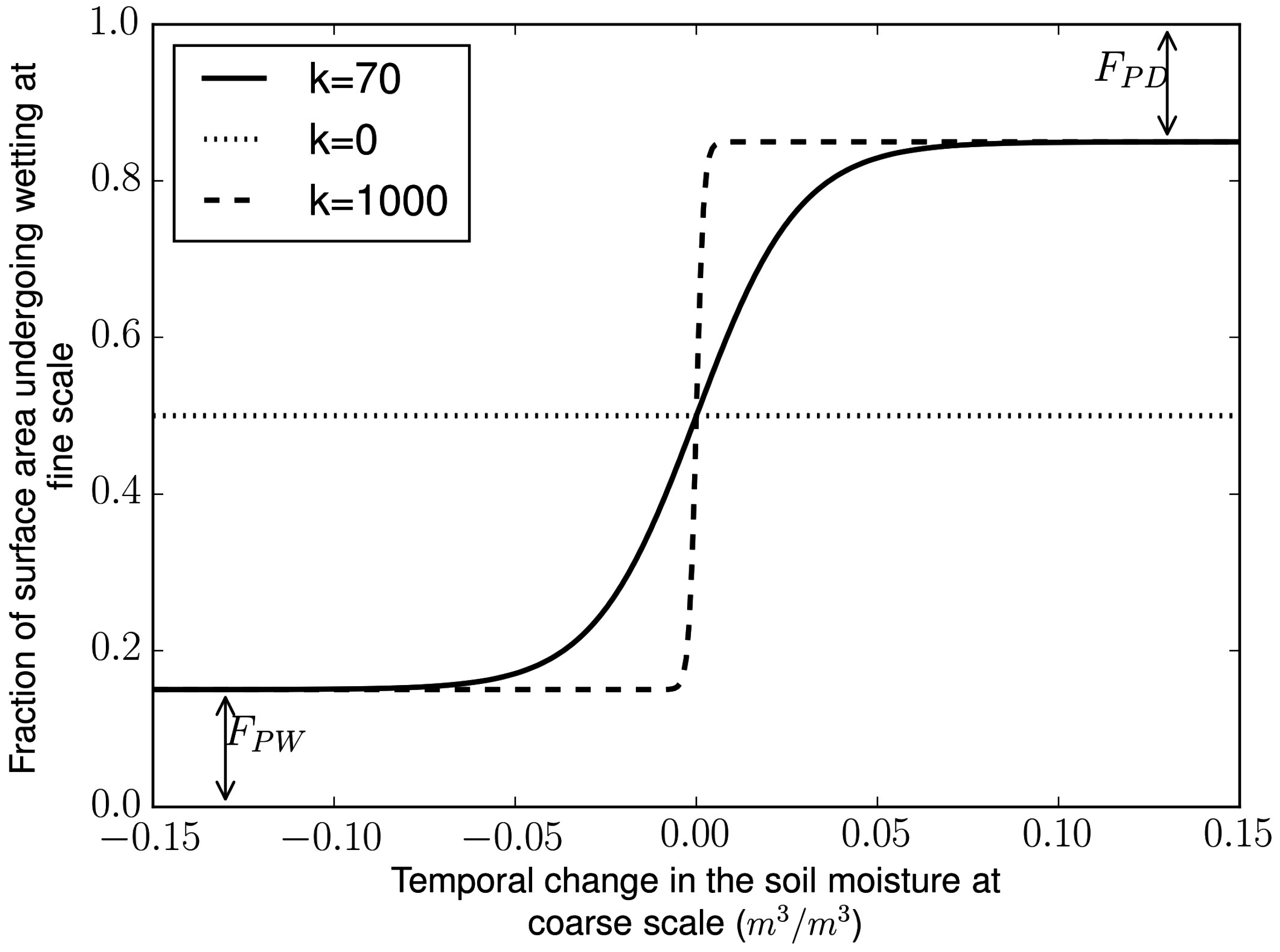
- MAPSM is based on the concept ofWater Change Capacity.
- -
- A case study using MAPSM is presented by using the RADARSAT-2 and SMOS retrieved soil moisture data products over Berambadi watershed, Karnataka, India.
- -
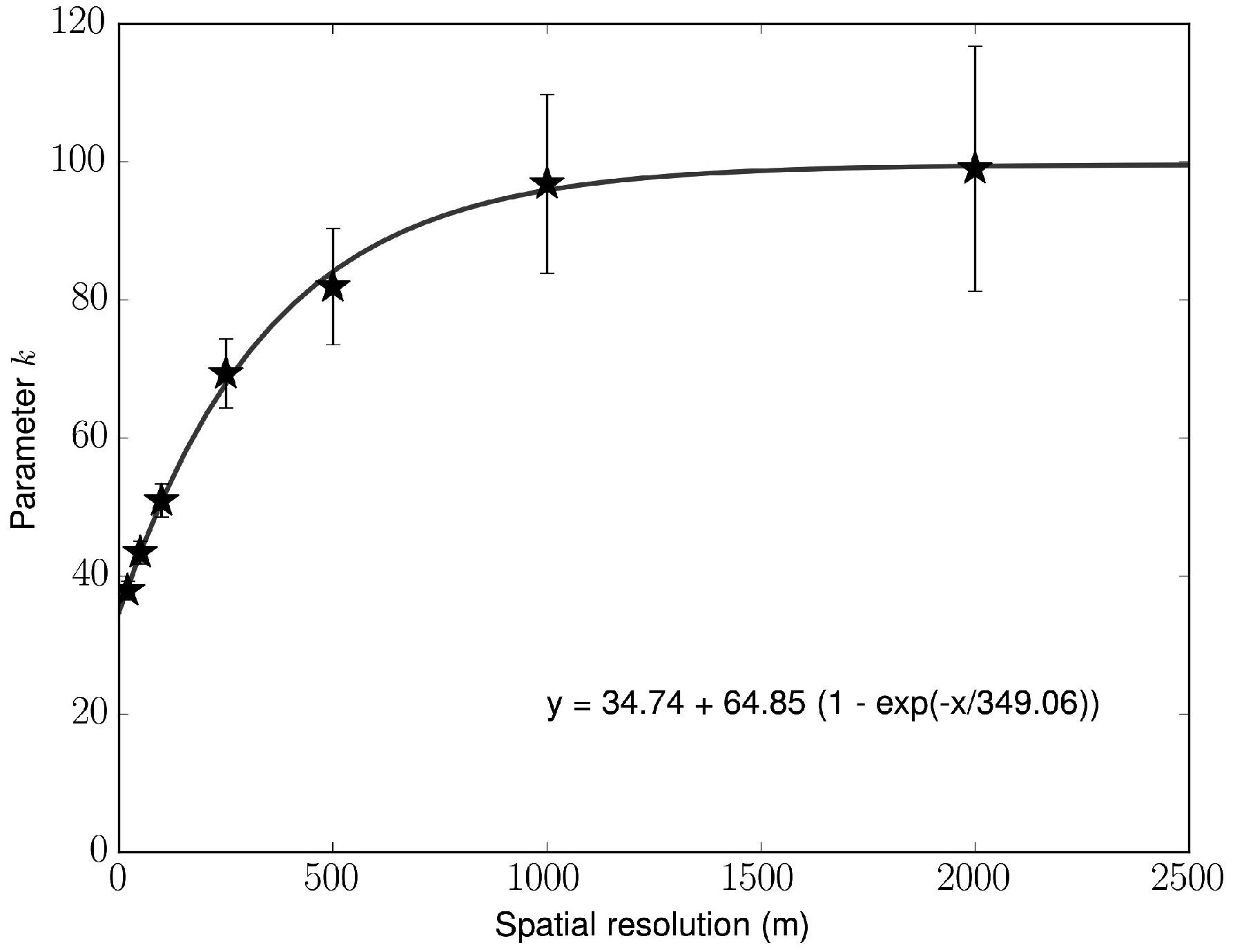
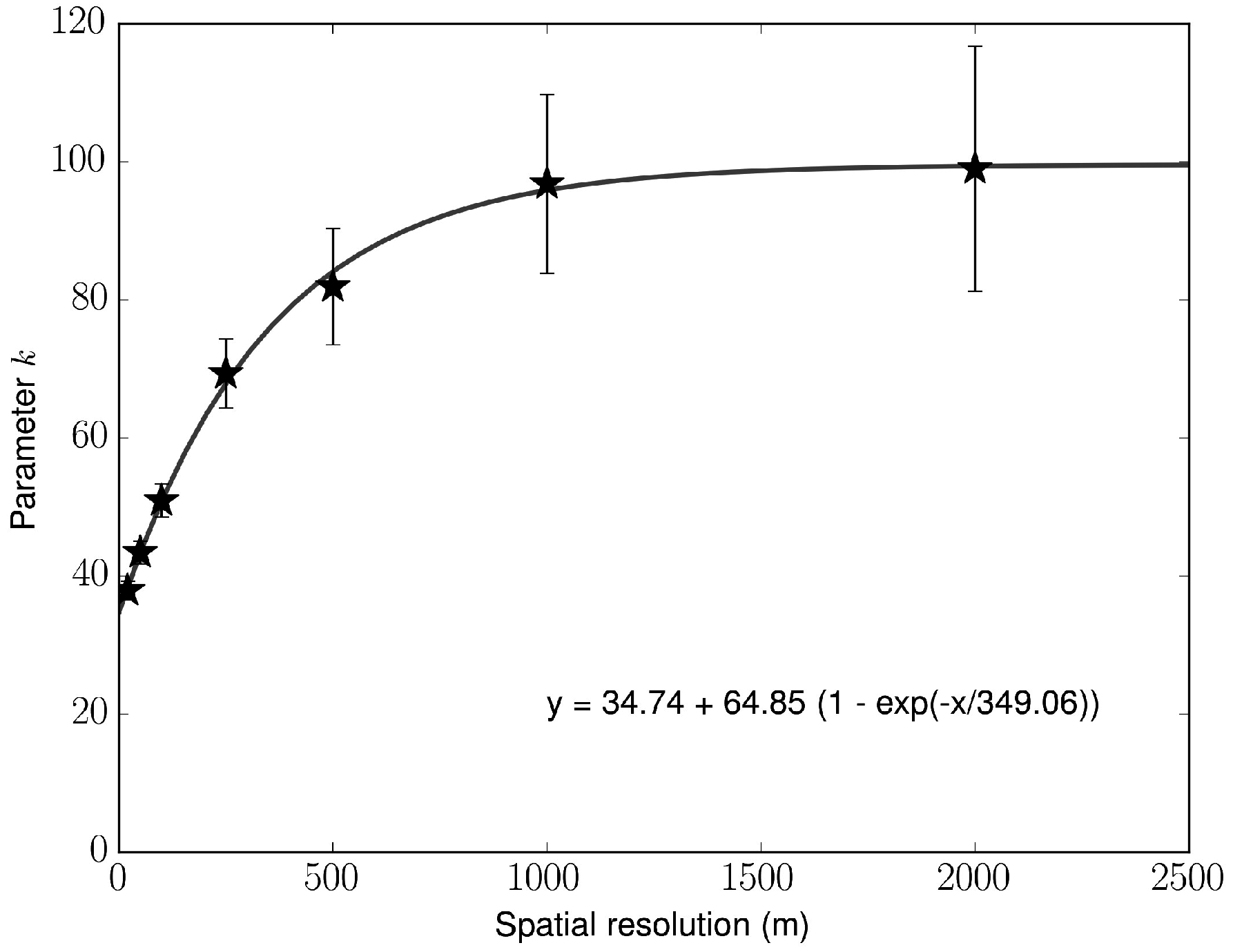
- The algorithm parameters show scalability from the spatial resolution of 20 m to 2000 m.
Abstract

1. Introduction
2. Study Area and Datasets
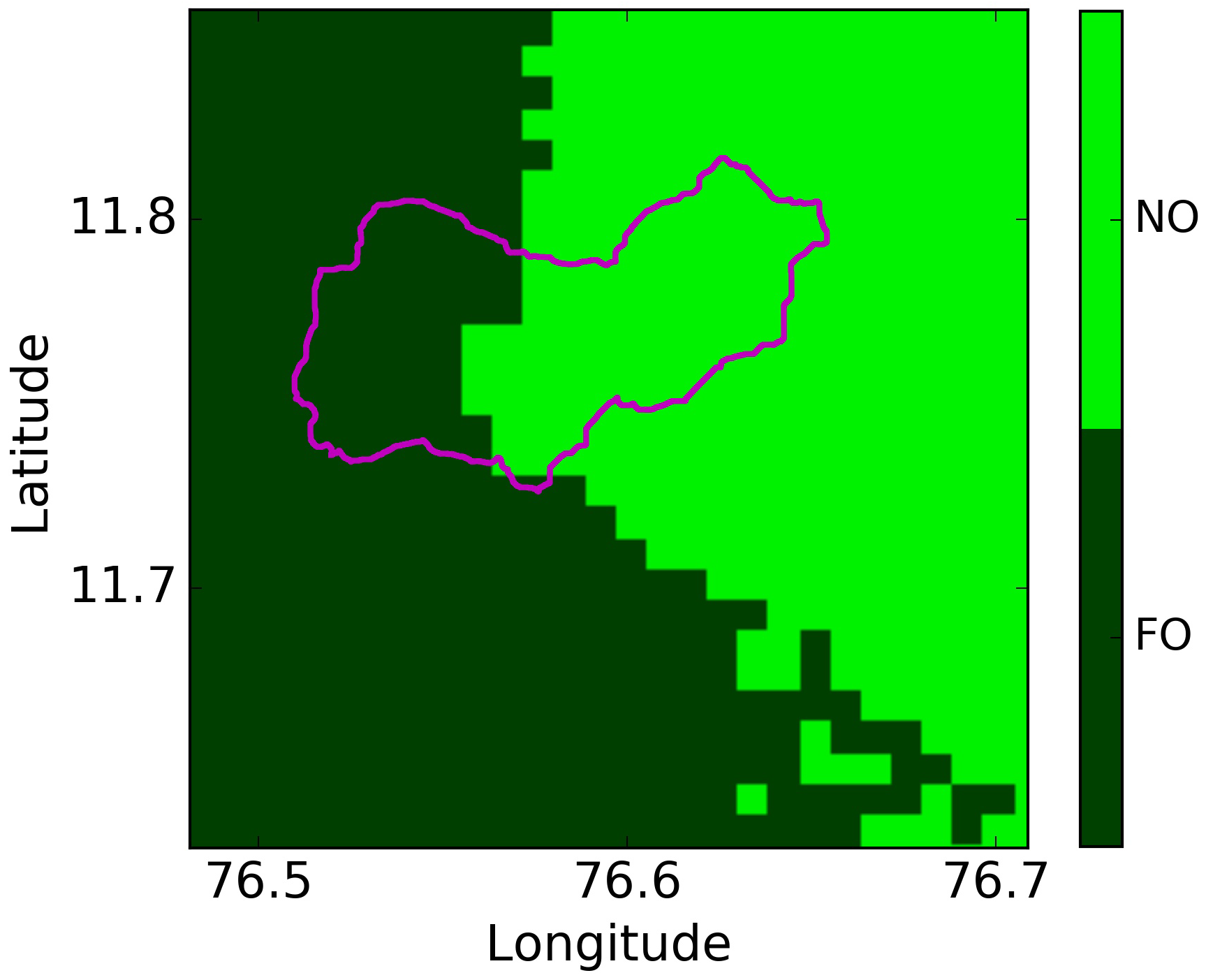
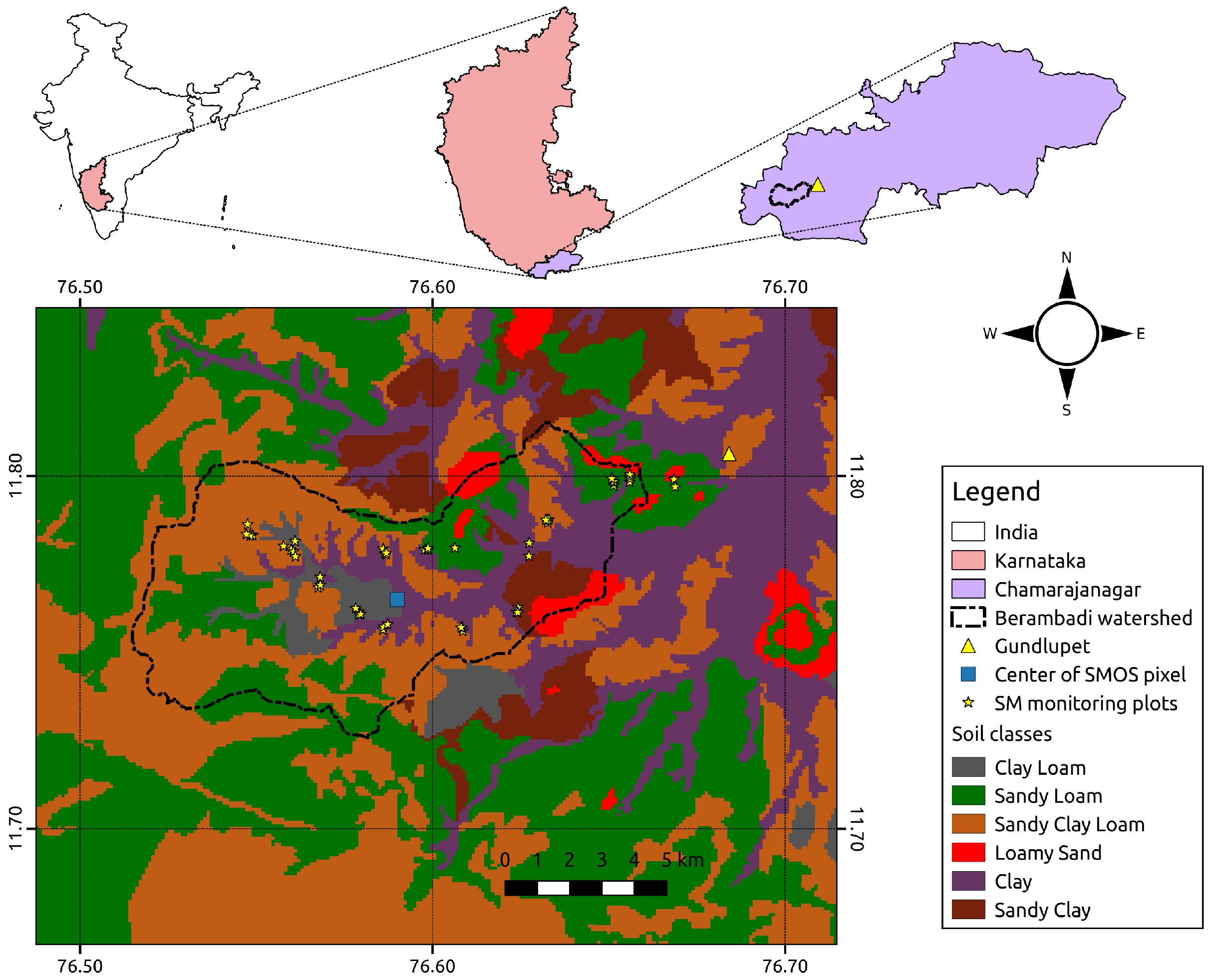
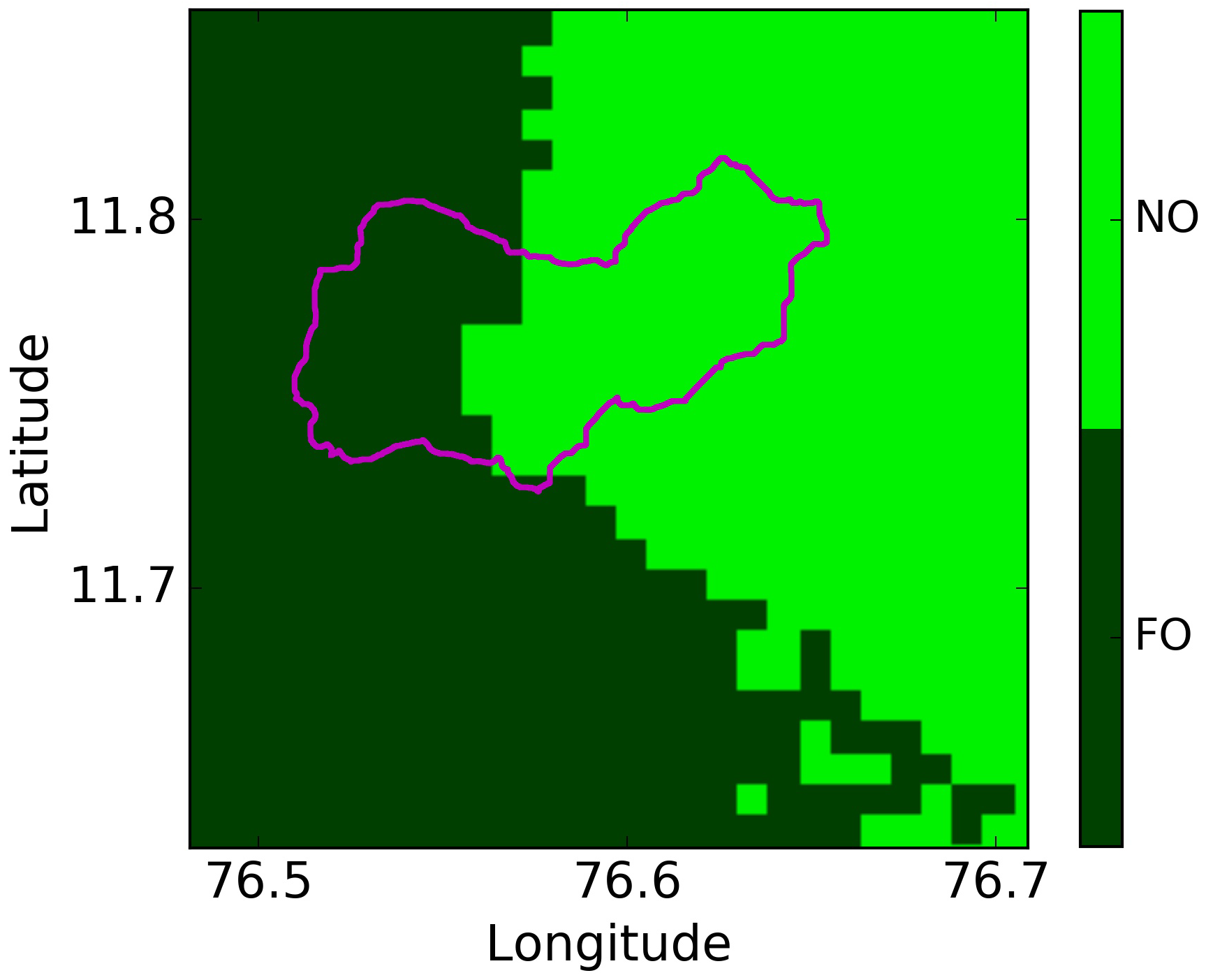
2.1. The Berambadi Watershed
2.2. Satellite Soil Moisture Datasets
3. Methodology
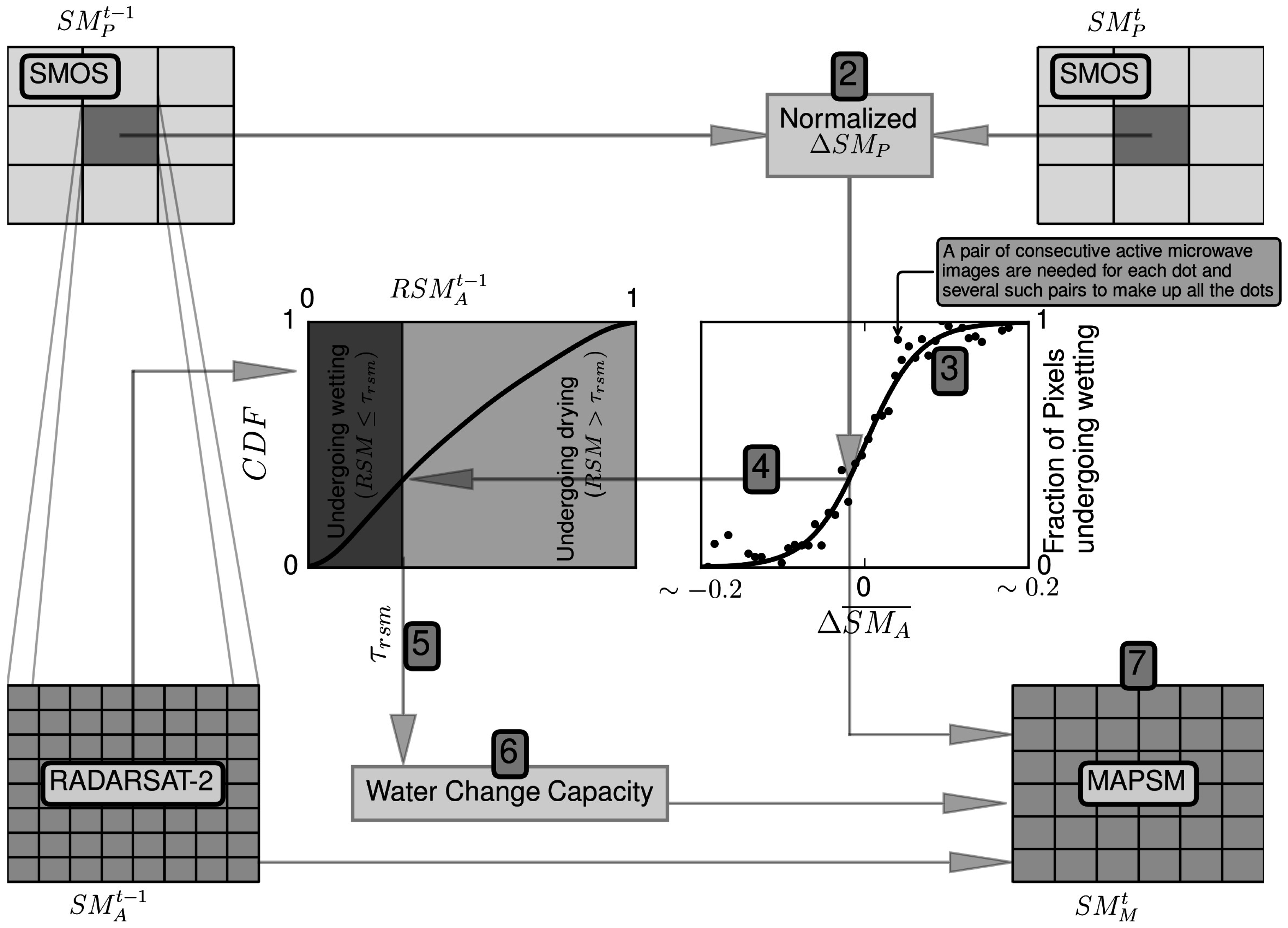
3.1. Merging Active and Passive Microwave Soil Moisture
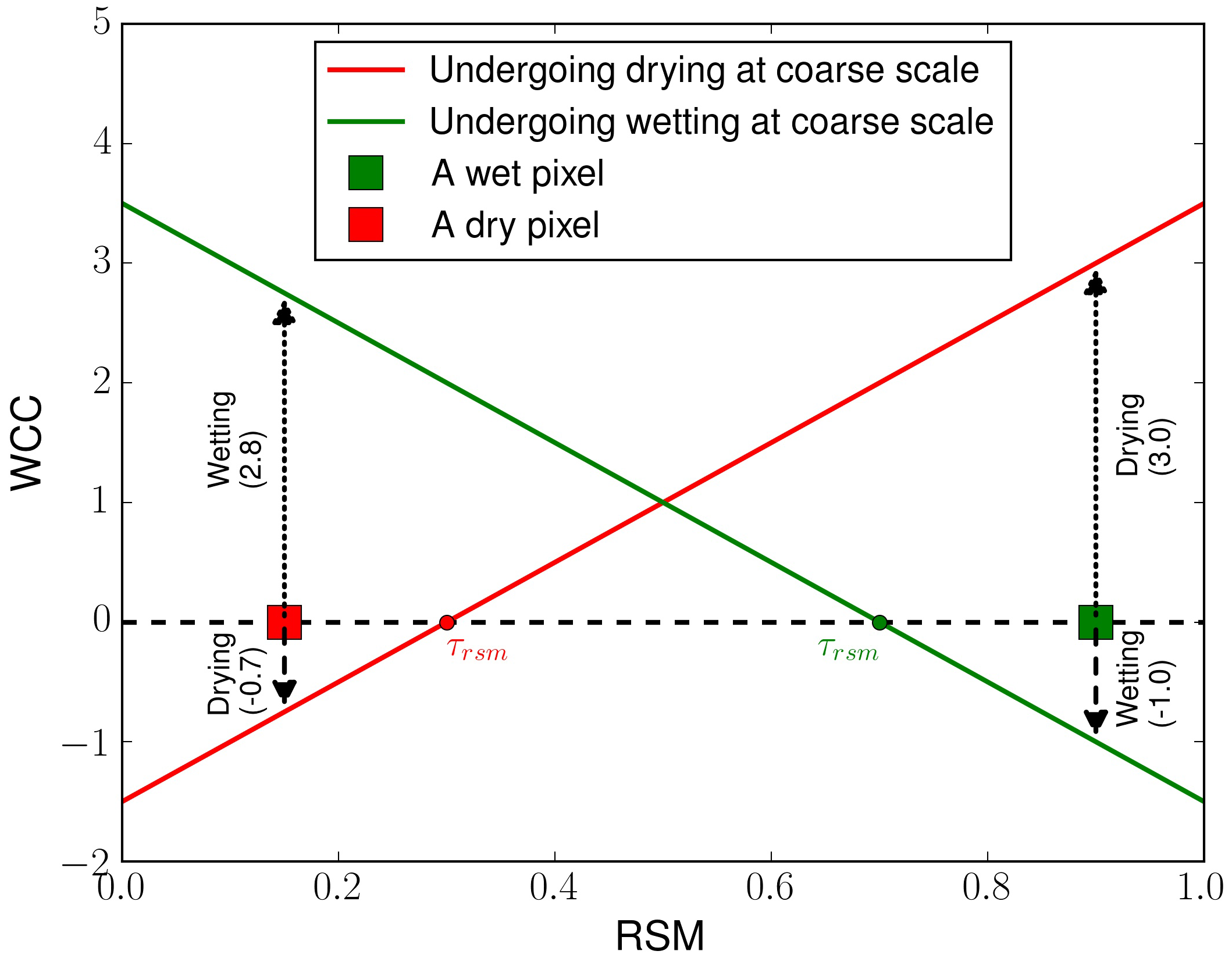
- Mean of the over space is equal to one
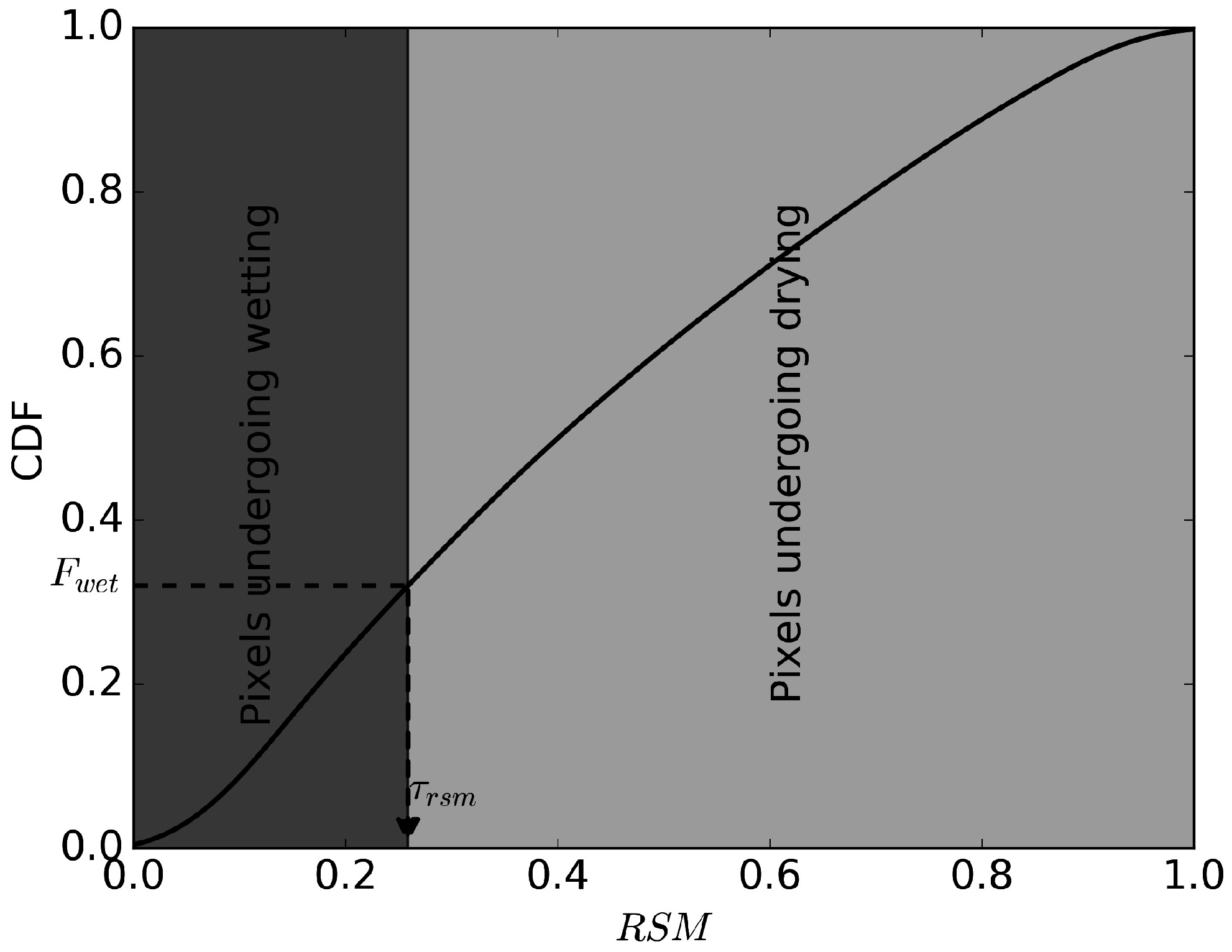
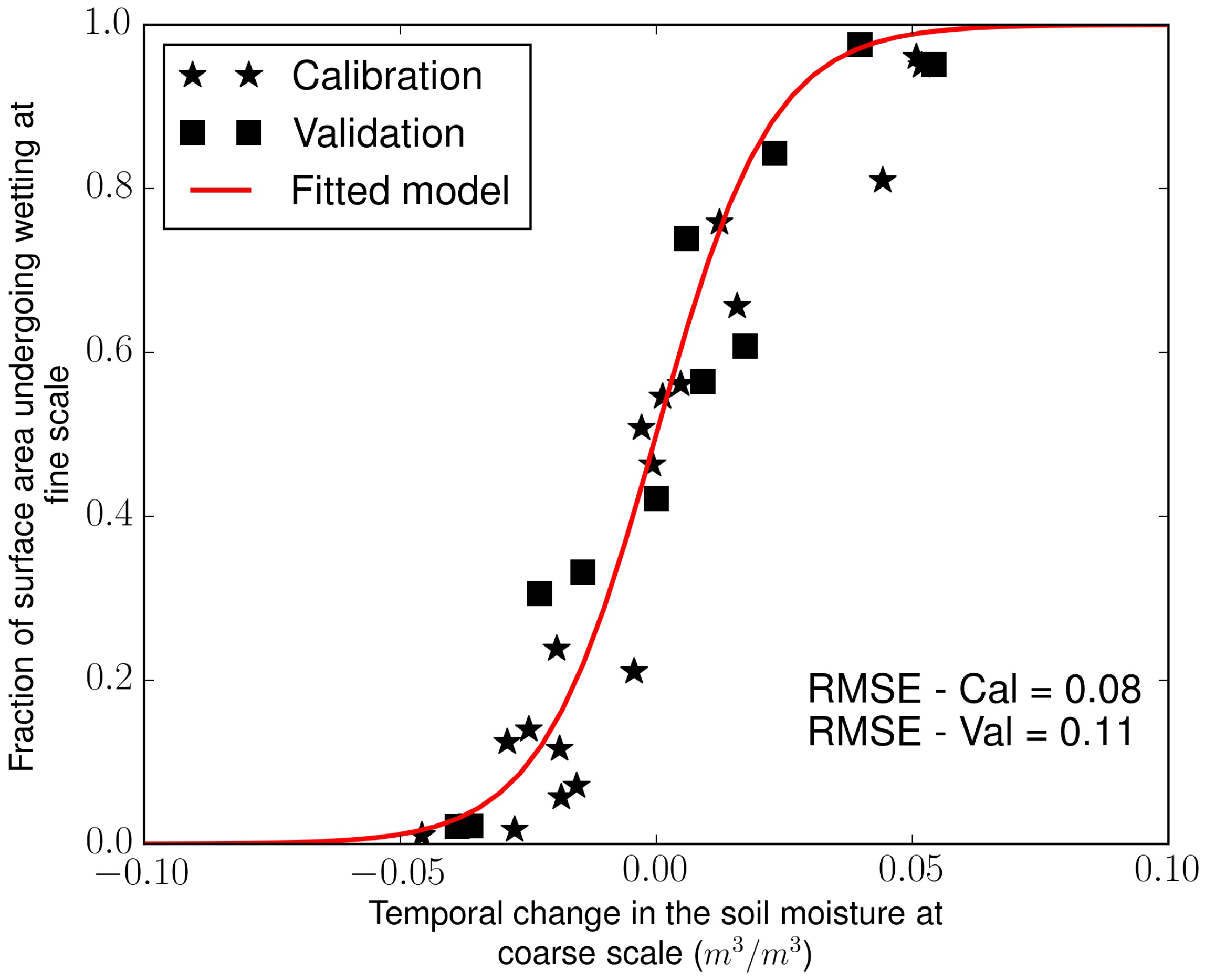
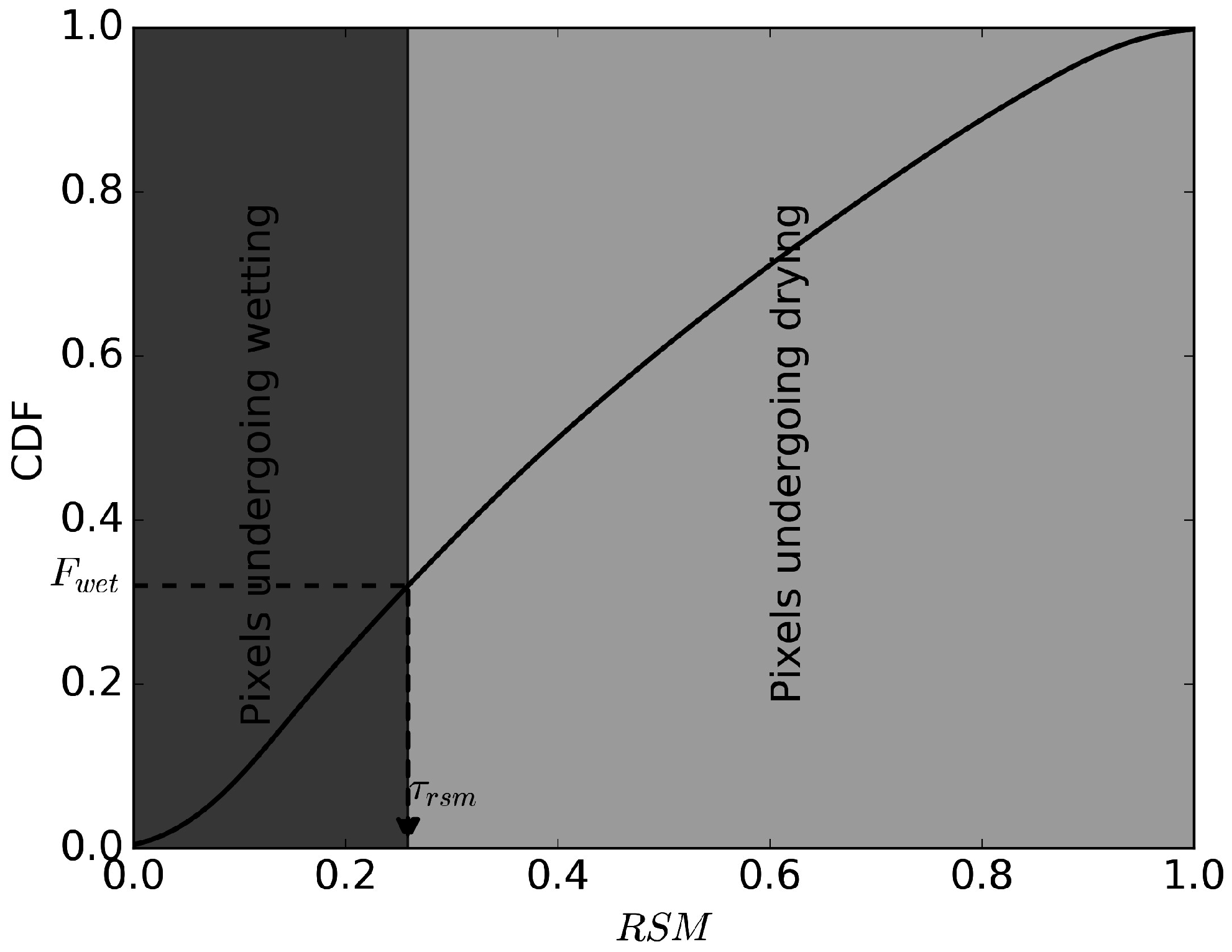
- is 0 when the soil moisture is equal to the threshold of the relative soil moisture for the pixels undergoing drying/wetting ()
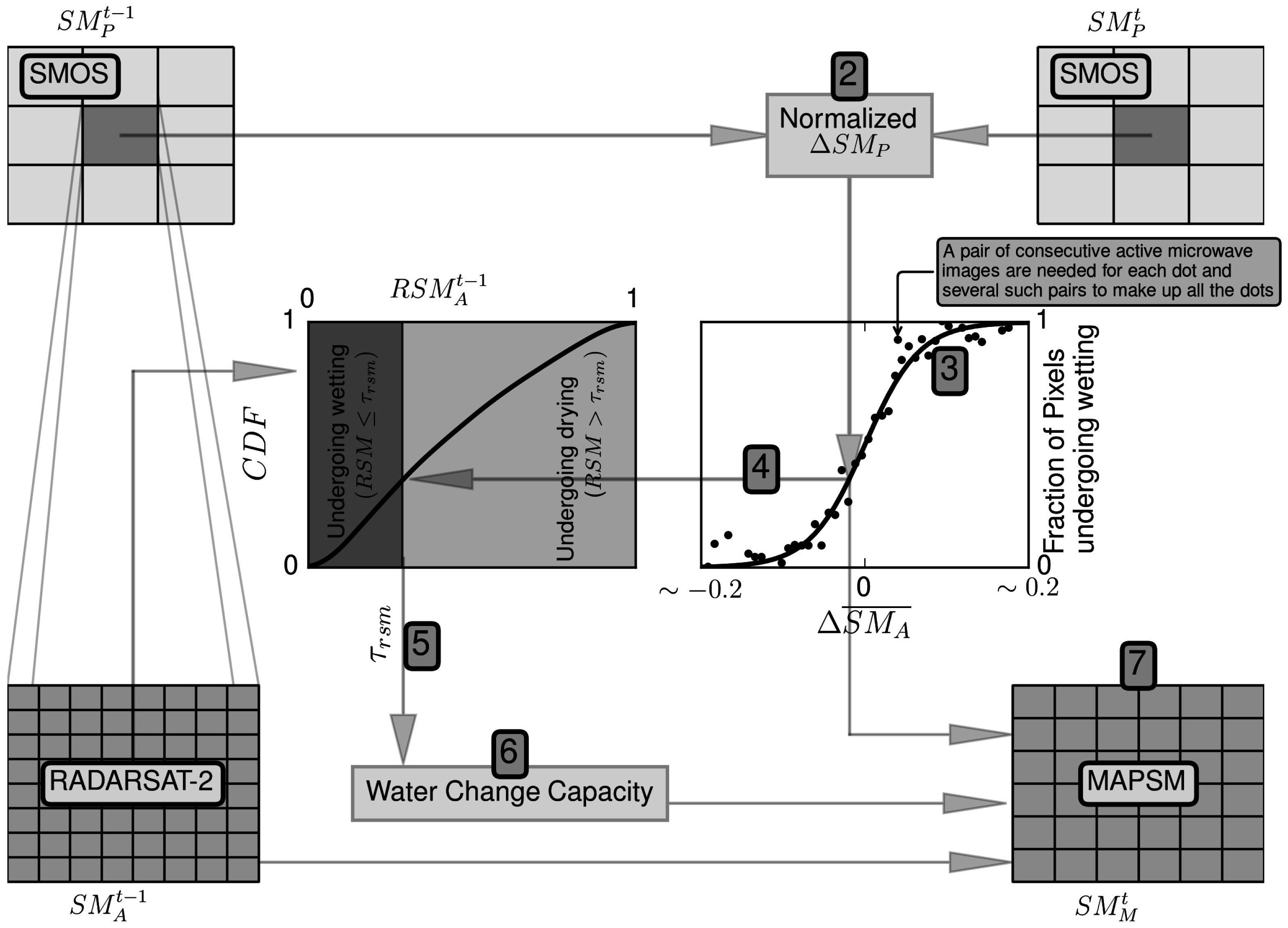
- correct the bias in SMOS soil moisture using the up-scaled RADARSAT-2 soil moisture,
- compute the bias corrected change in soil moisture at coarse scale ,
- calibrate the parameter k using the entire data,
- compute and from Equations (3) and (4) respectively,
- compute from Equation (6),
- compute from the Equation (10) for each RADARSAT-2 pixel and time t, and
- compute from the Equation (1) for each RADARSAT-2 pixel and time t.
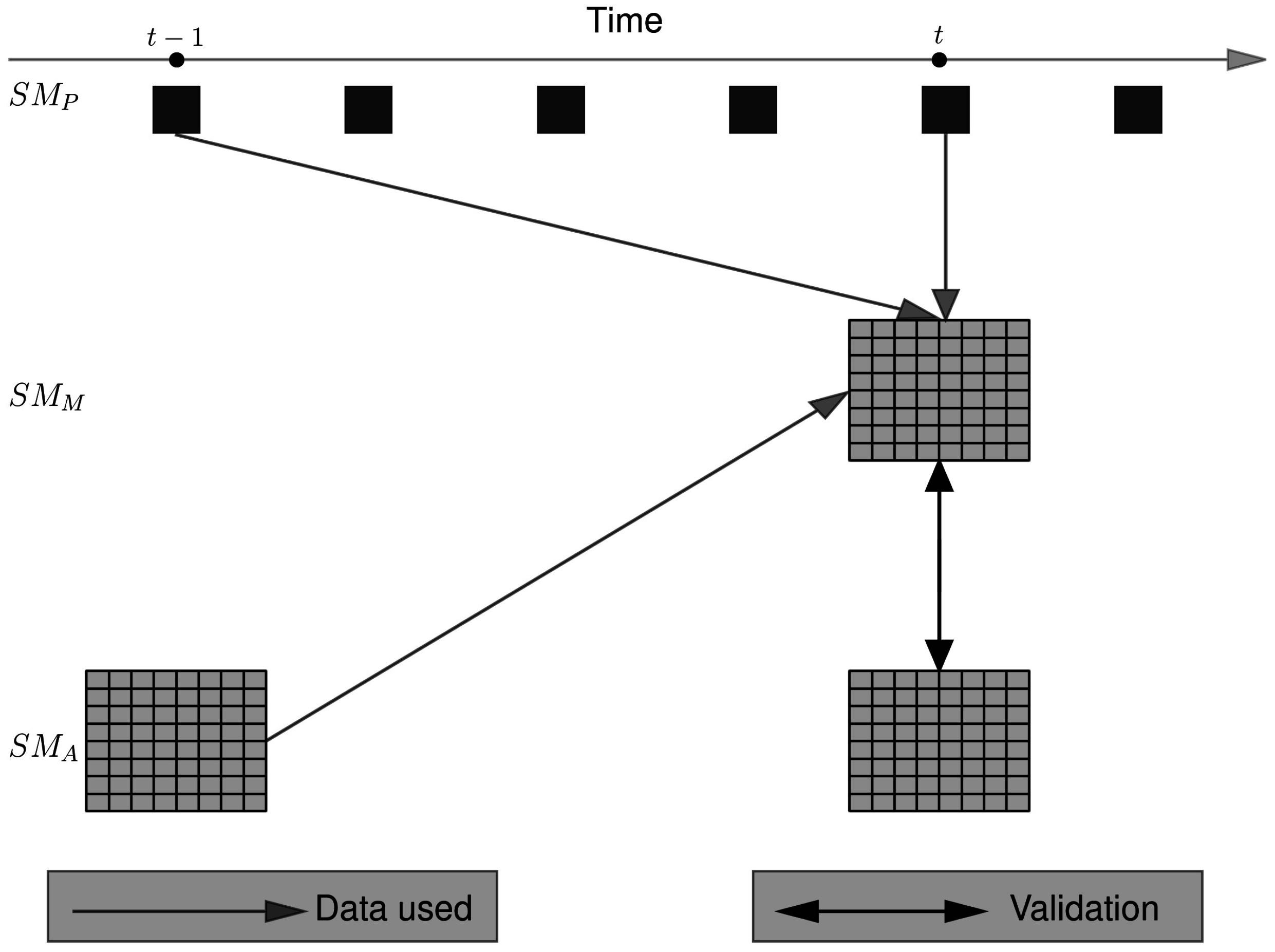
3.2. Design of the Experiments
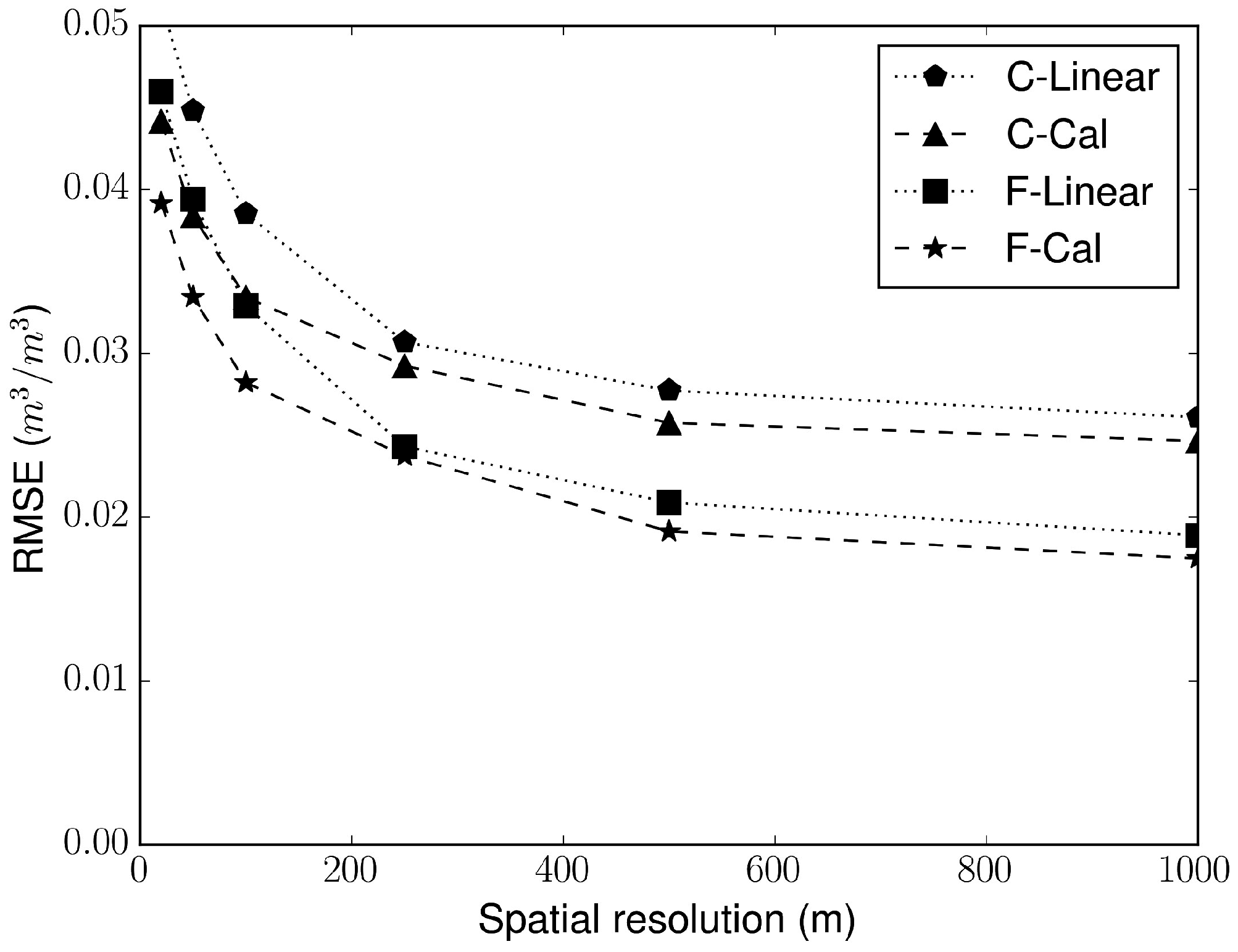
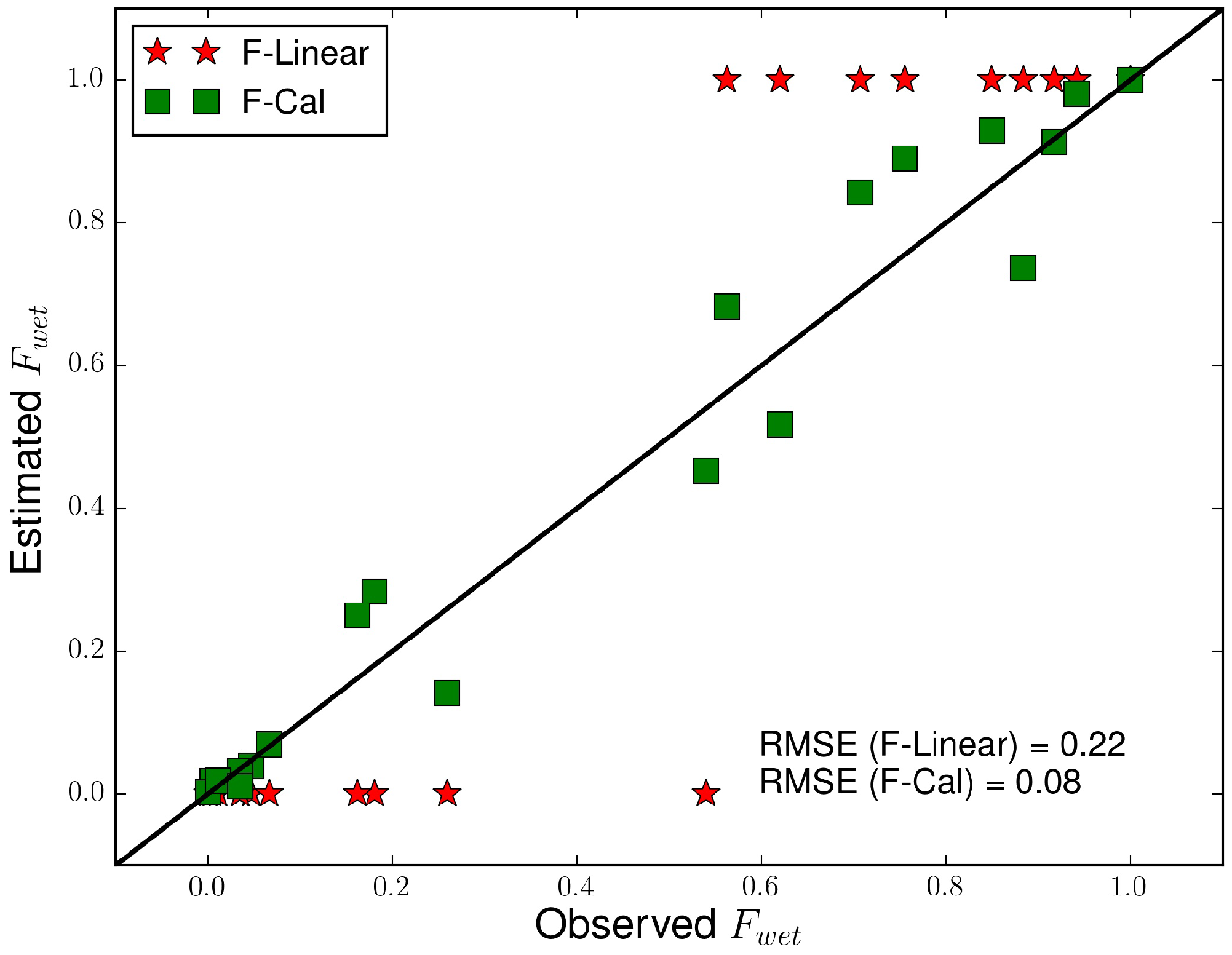
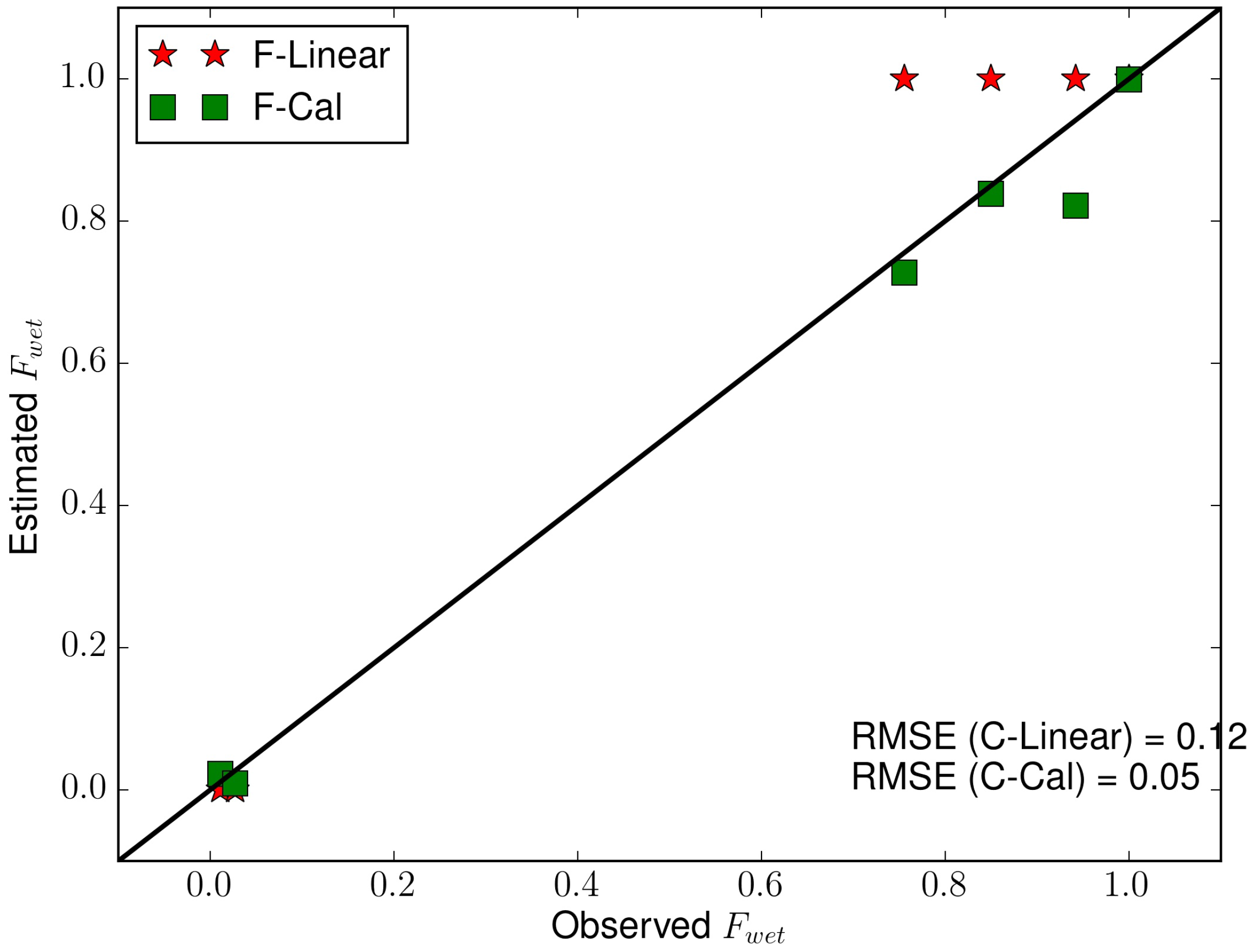
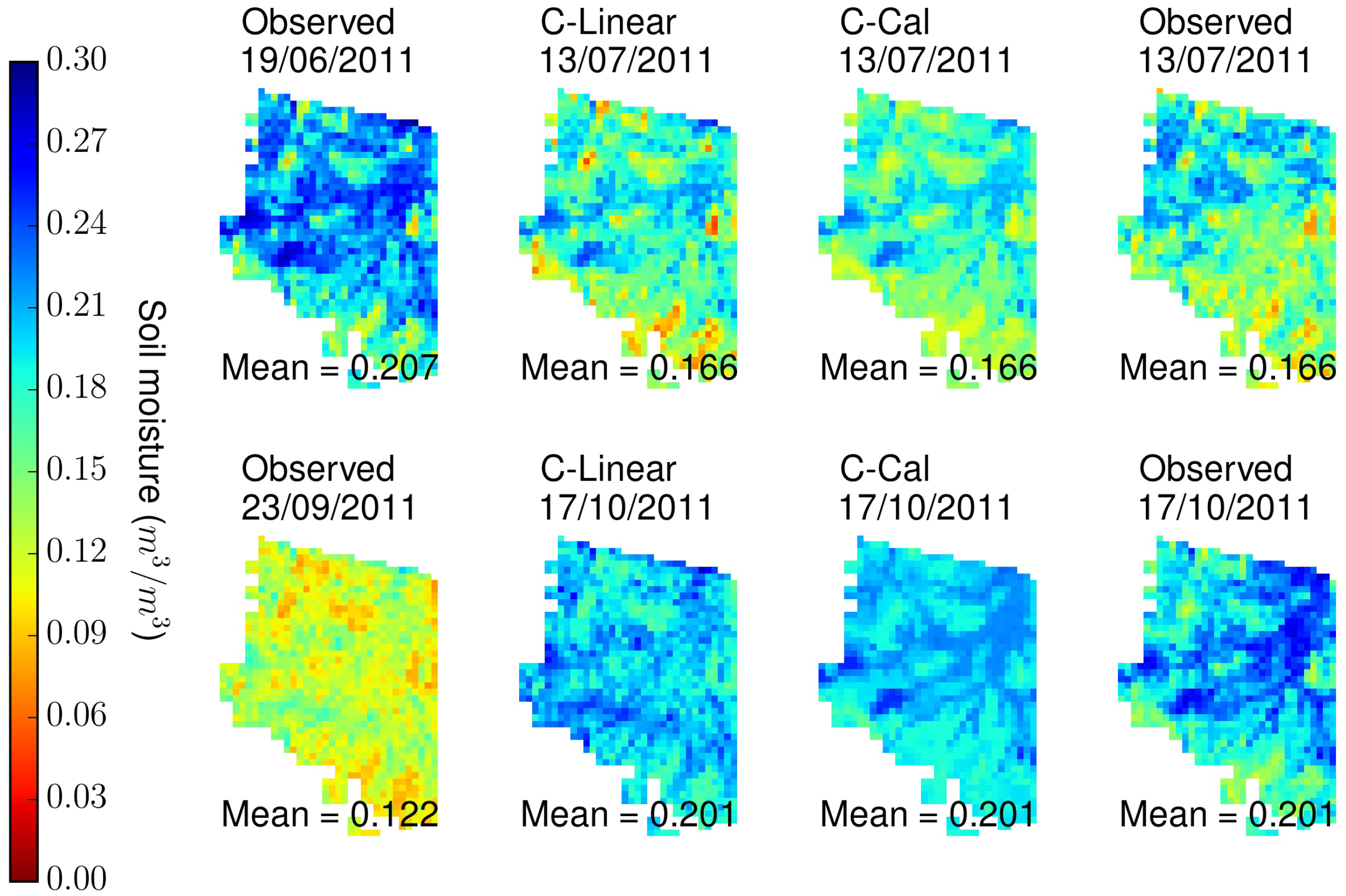
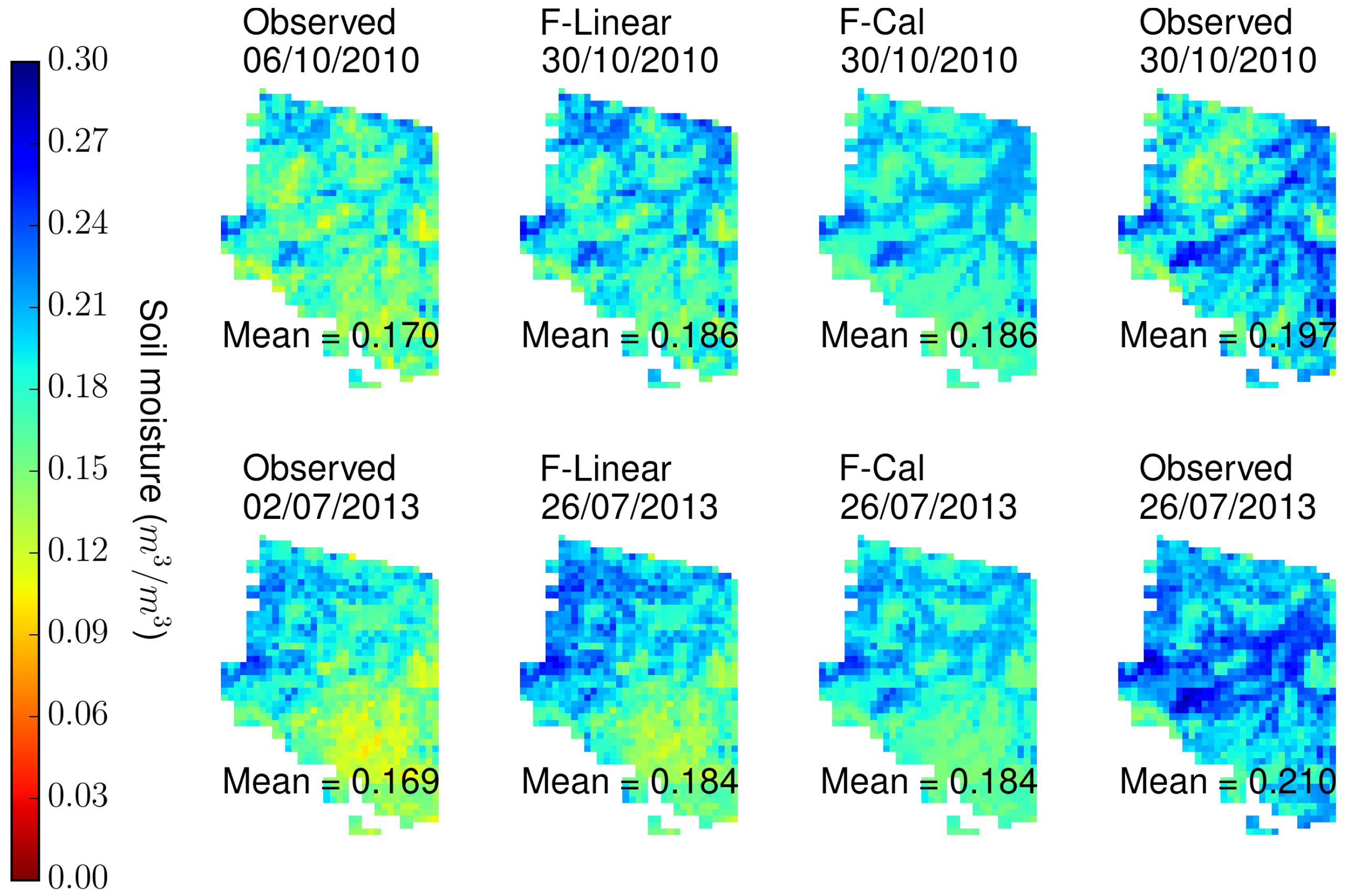
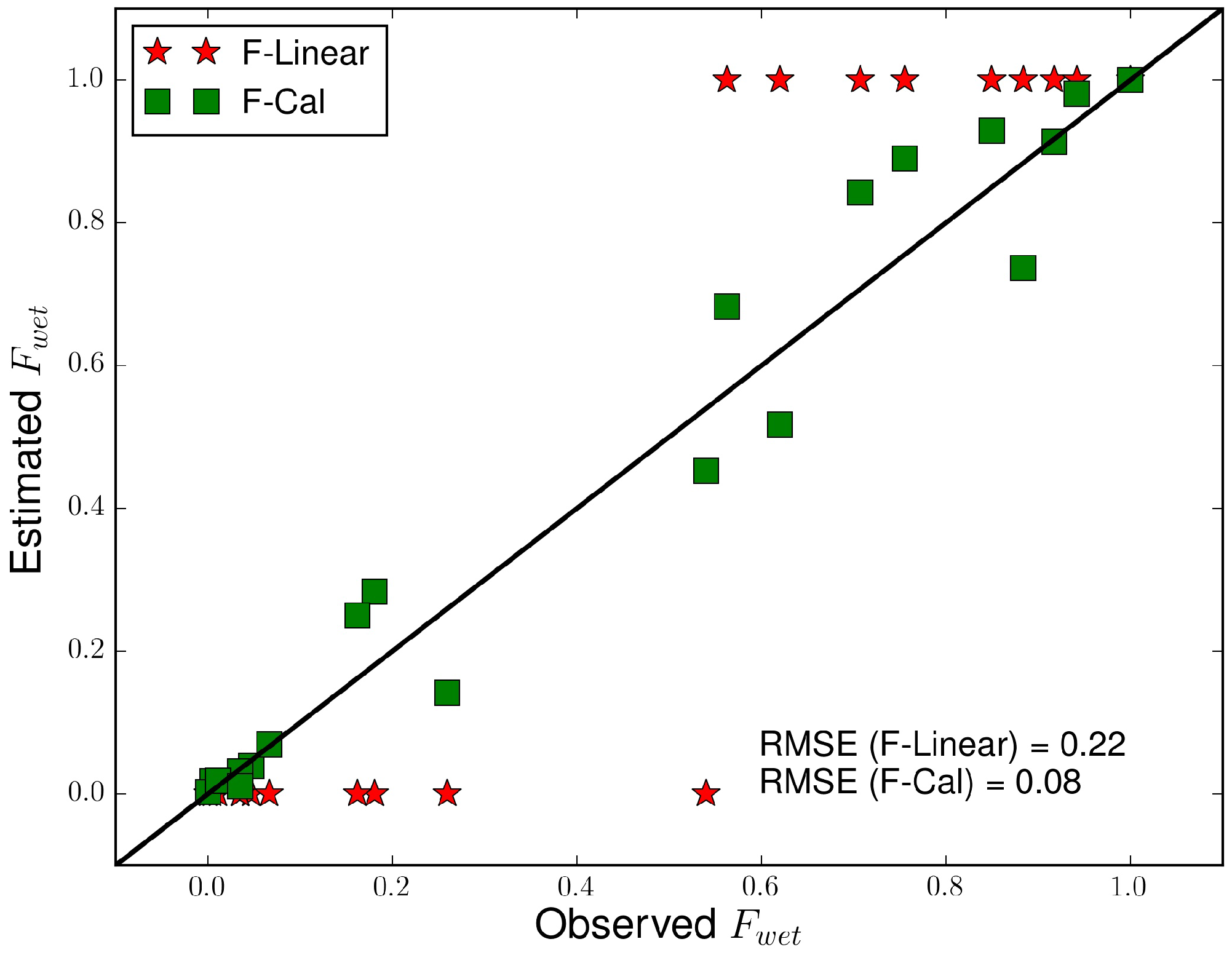
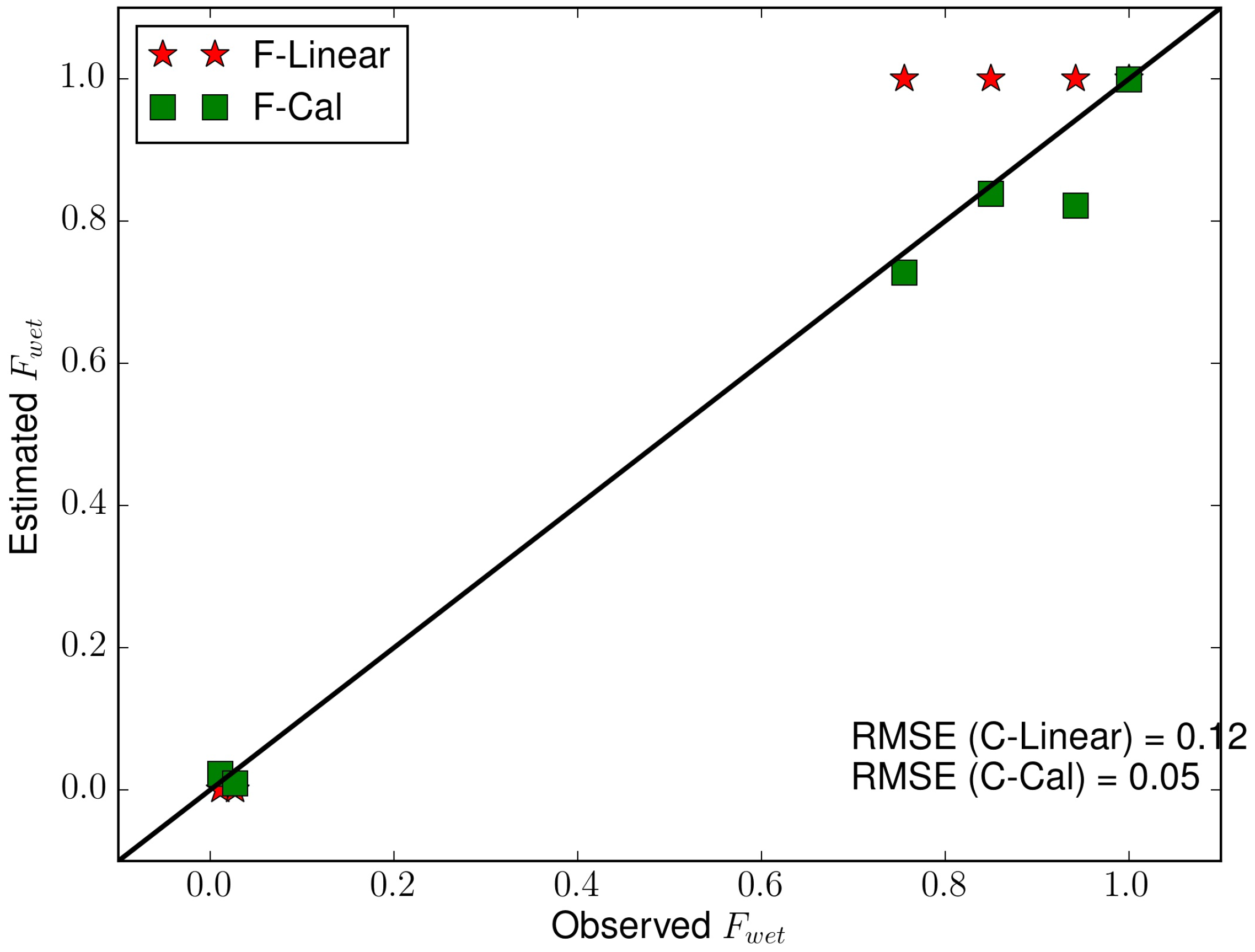
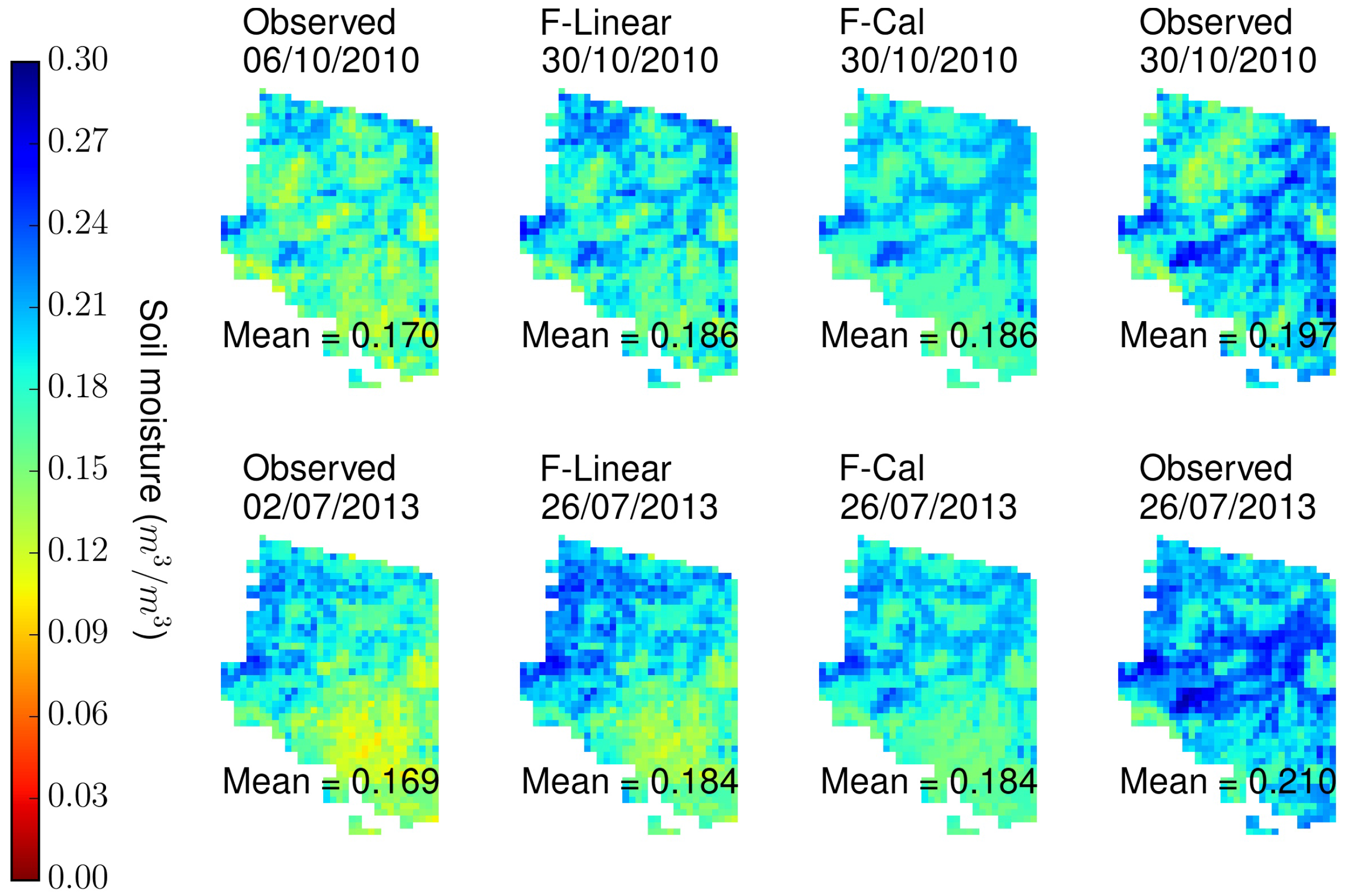
- equal to one. In this case the change in the coarse scale soil moisture is equally redistributed across the fine scale pixels (F-Linear and C-Linear).
- computed using the calibrated k parameter (F-Cal and C-Cal). The k is calibrated using the time series of soil moisture from active microwave at fine scale.
3.3. Validation Strategy
4. Results
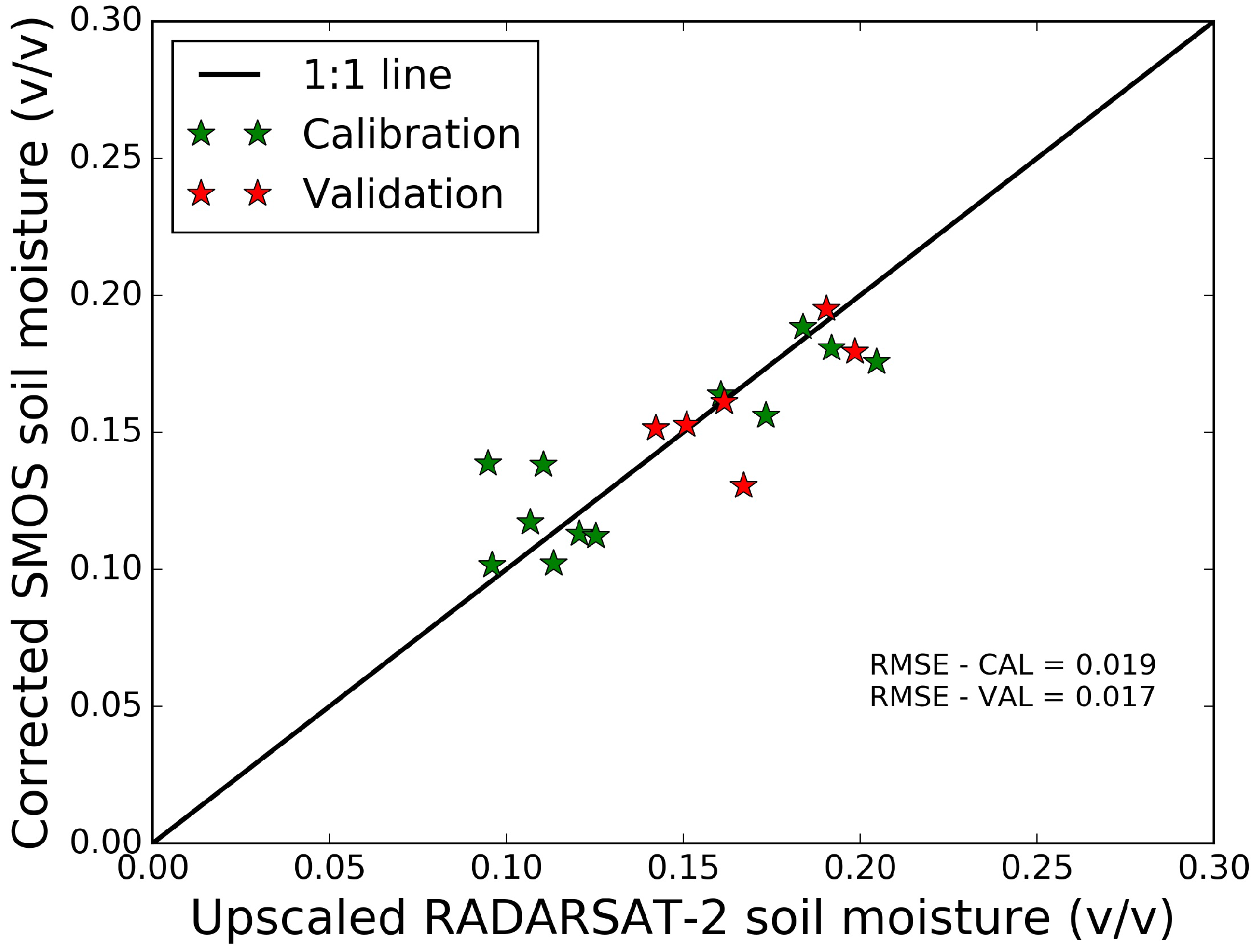
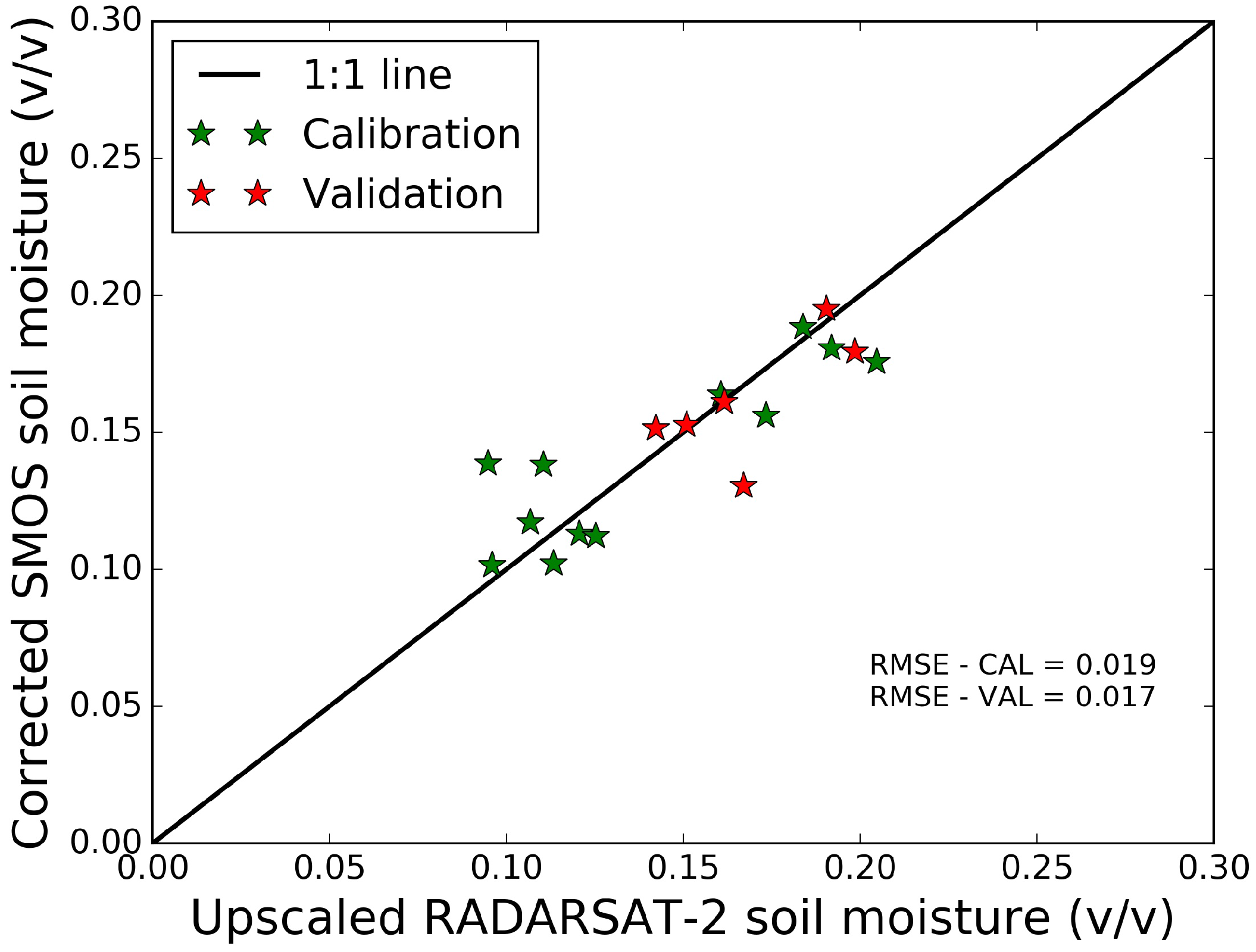
4.1. Bias Correction at Coarse Scale
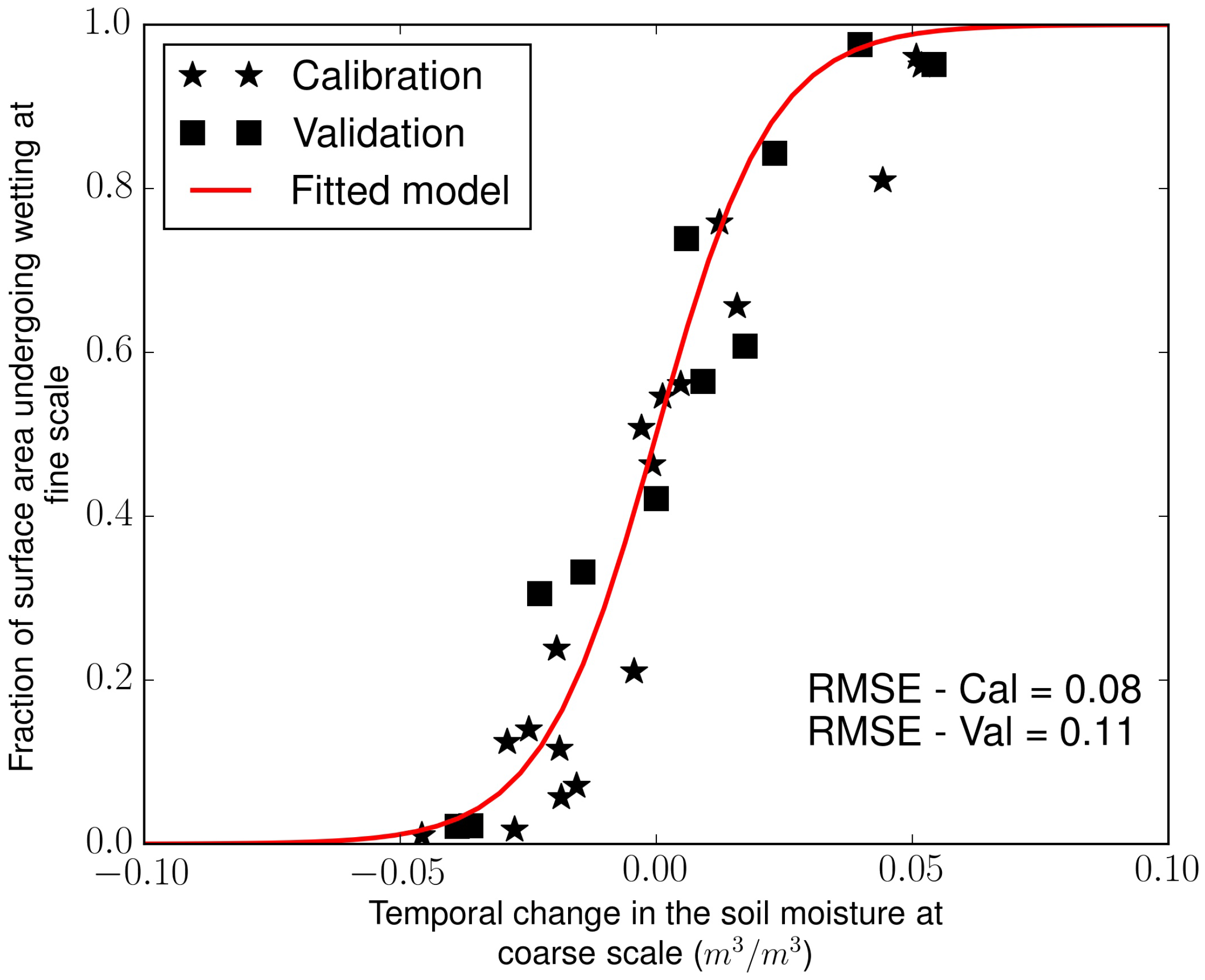
4.2. Estimation of Parameter k
5. Discussion
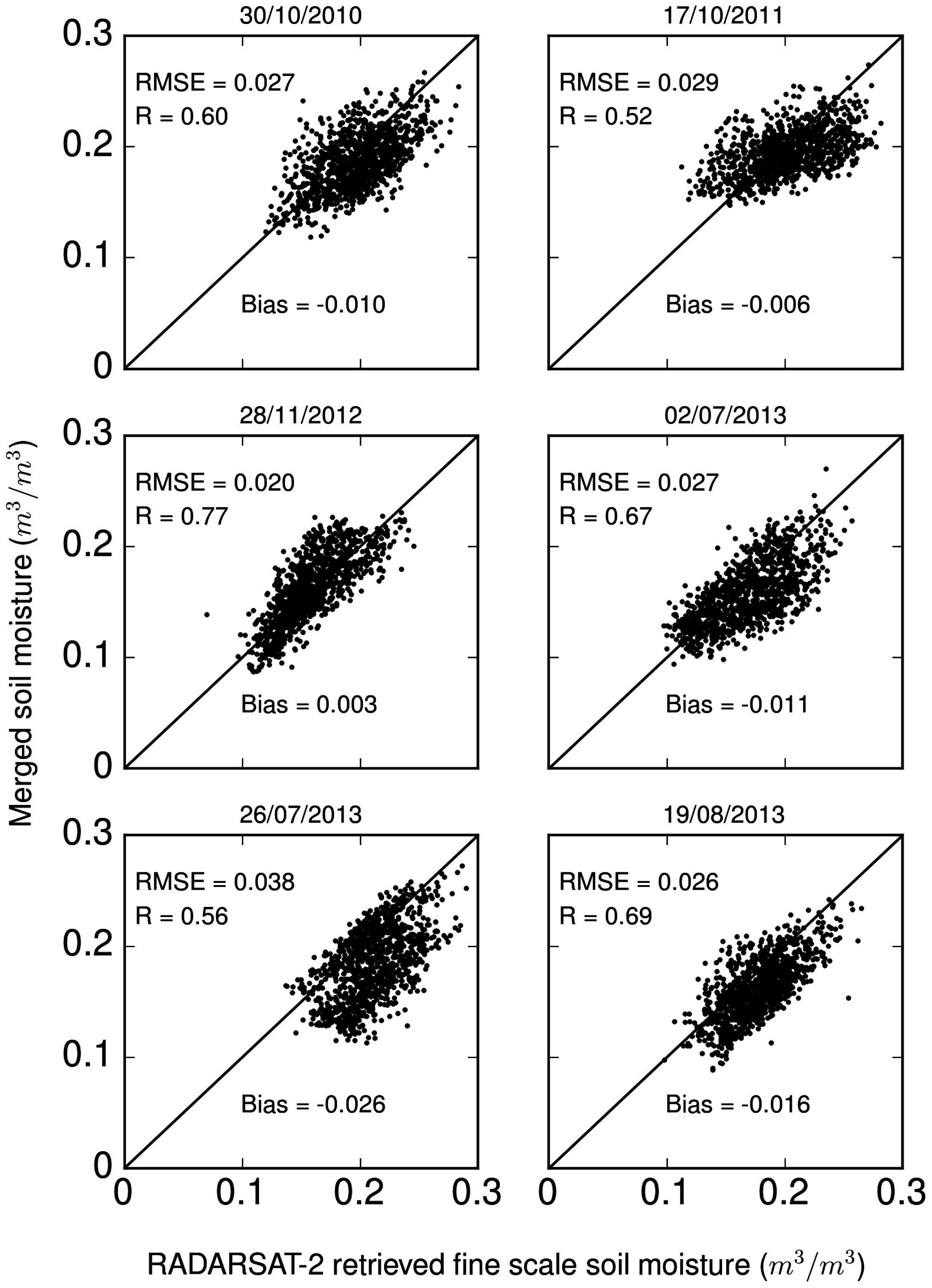
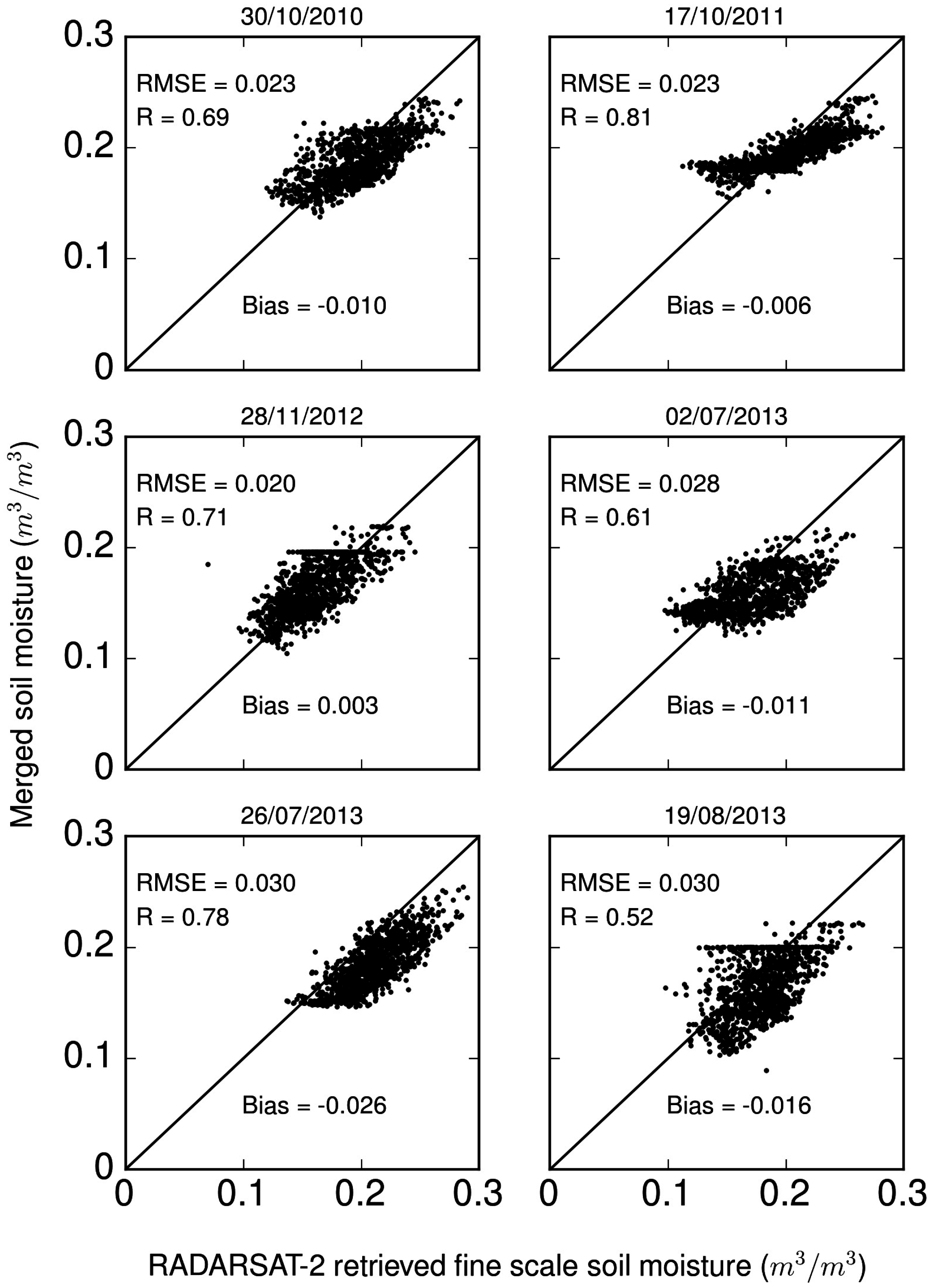
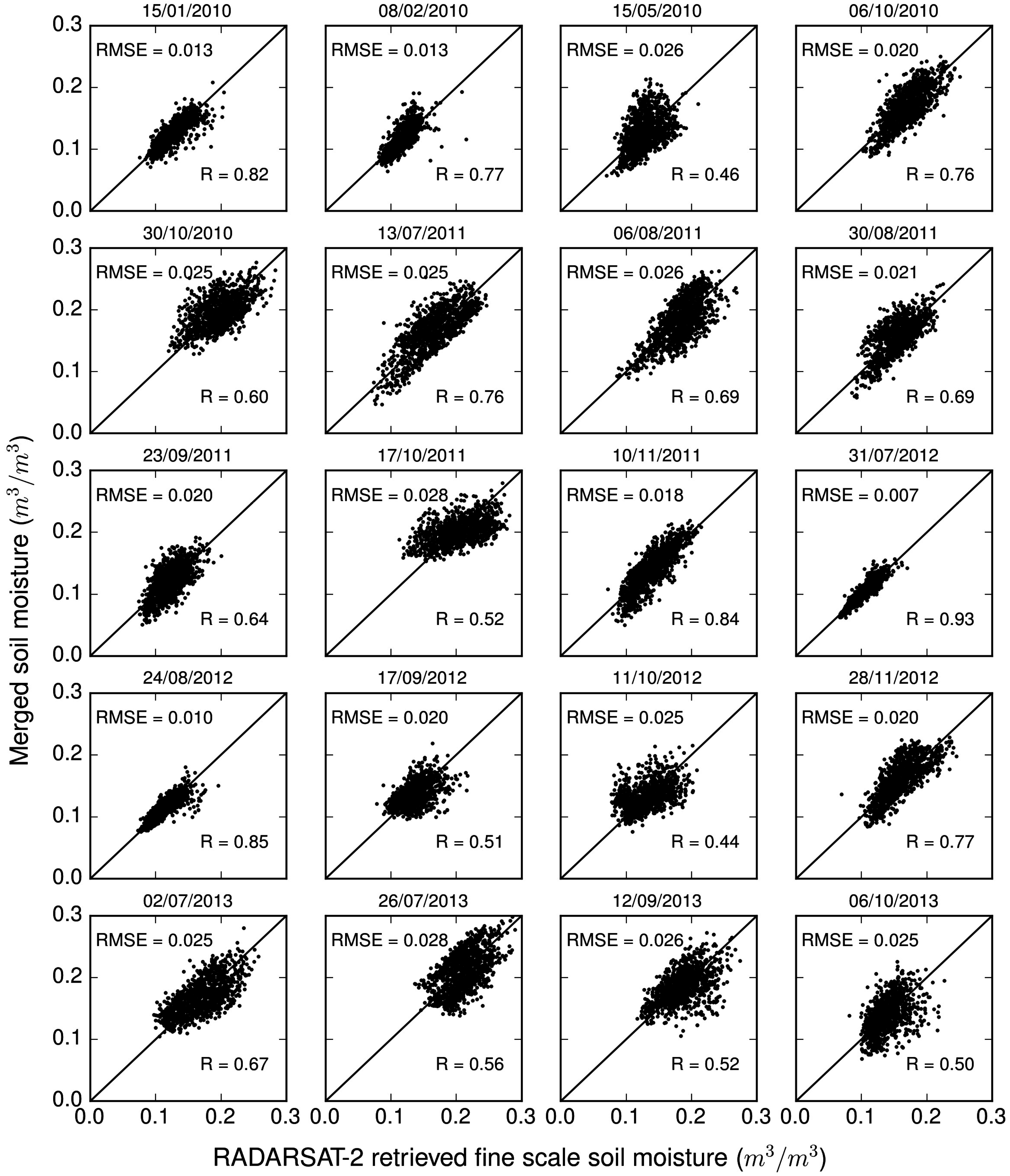
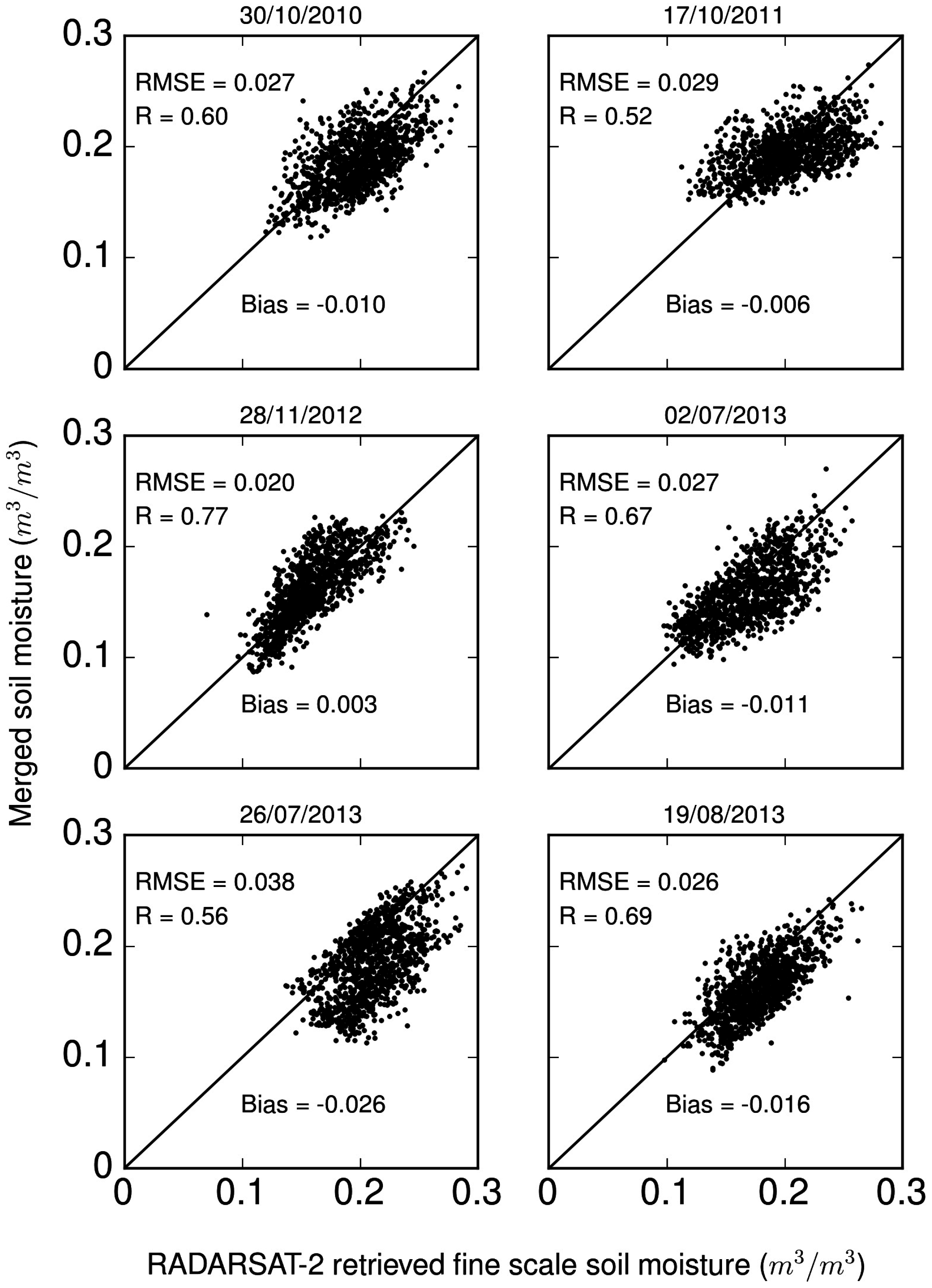
5.1. Validation Using RADARSAT-2 SM
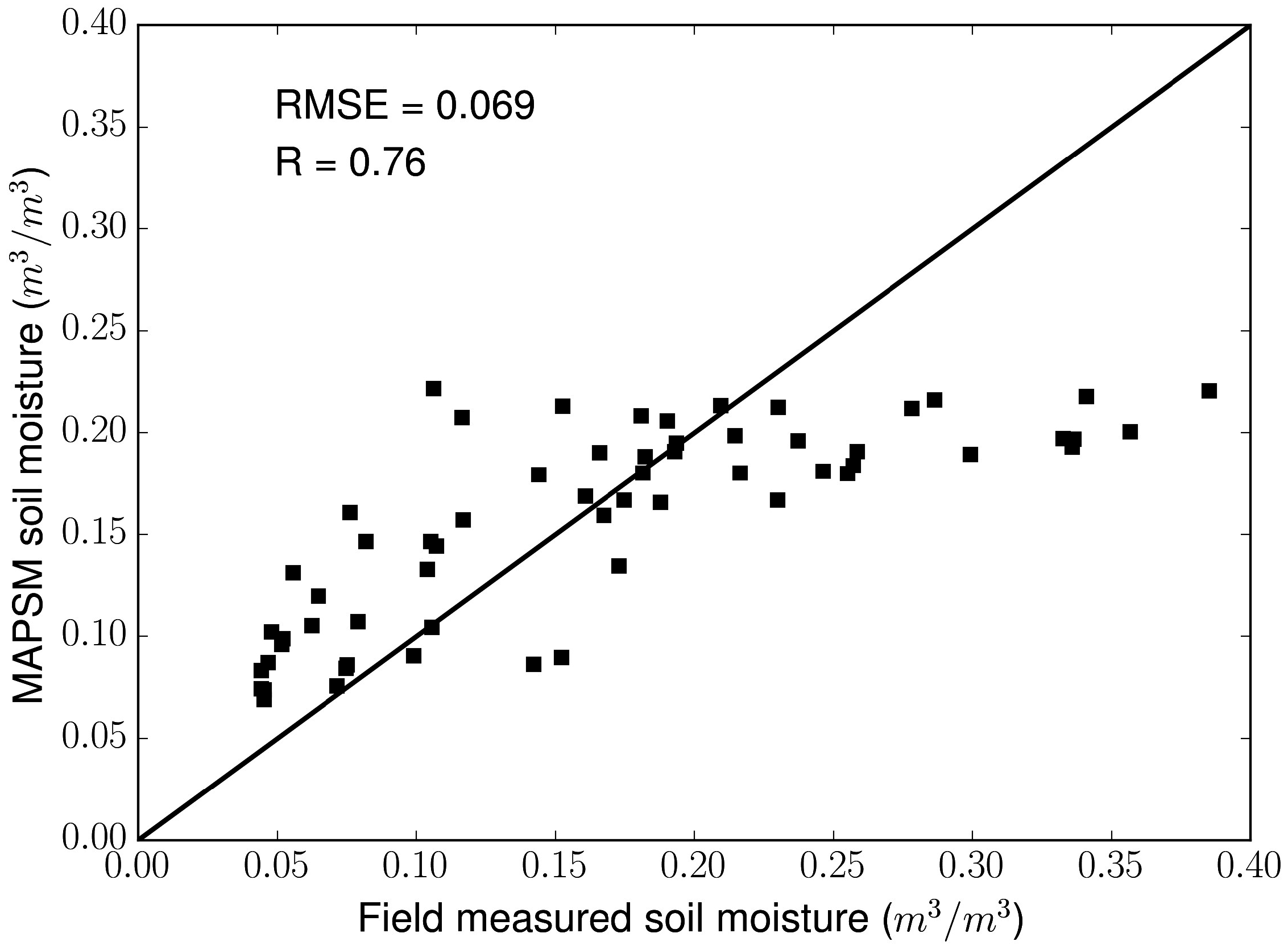
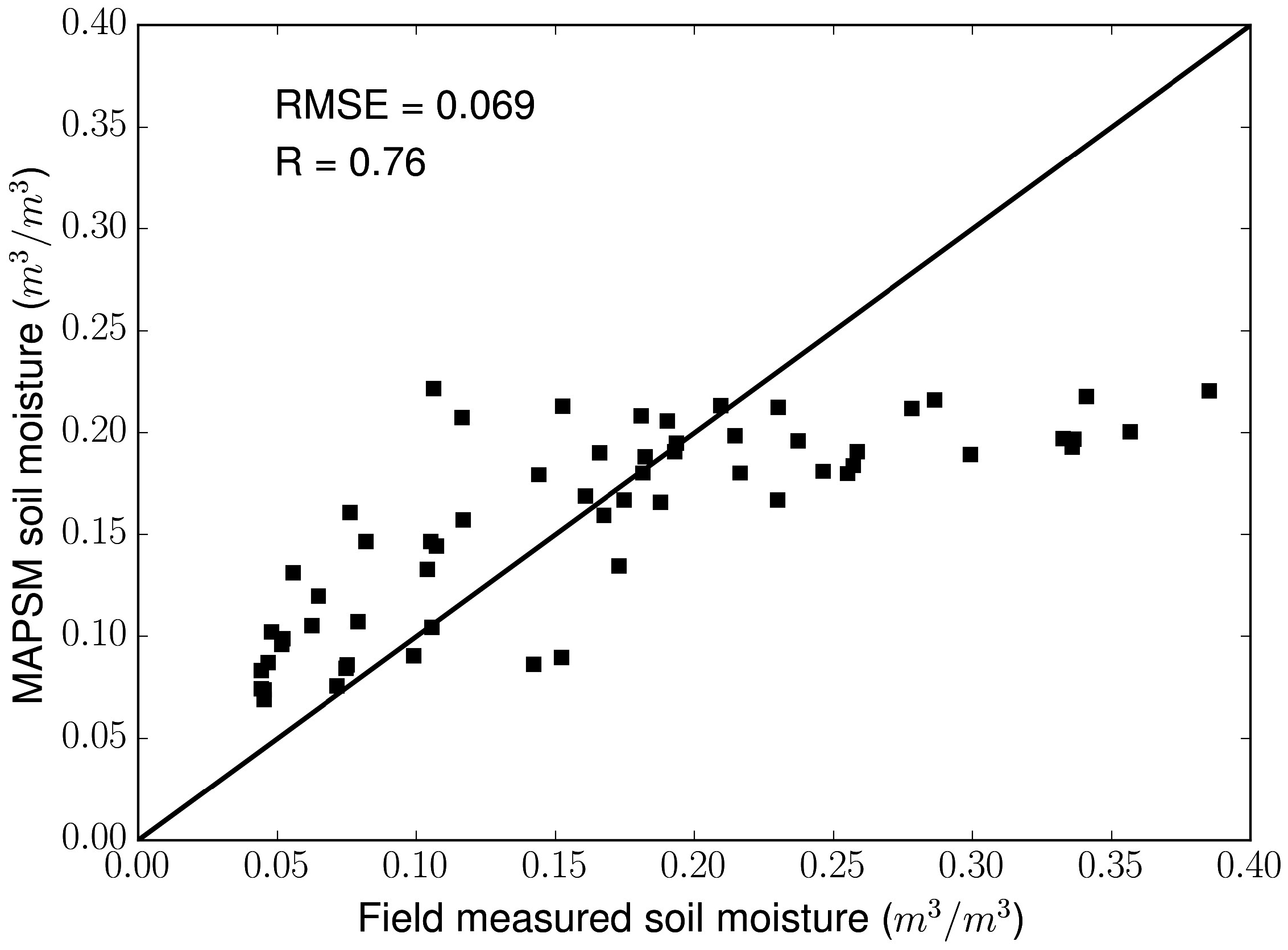
5.2. Validation Using Field Measured SM
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CDF | Cumulative Density Function |
| CF | Clay Fraction |
| CNES | Centre National d’Etudes Spatiales |
| DQX | data quality index |
| ESA | European Space Agency |
| LAI | Leaf Area Index |
| LC | Land Cover |
| LDAS | Land Data Assimilation System |
| LST | Land Surface Temperature |
| MAF | Mean antenna footprint |
| MAPSM | Merging Active and Passive microwave Soil Moisture |
| RADARSAT-2 | RADAR SATellite-2 |
| RFI | Radio Frequency Interference |
| RISAT | Radar Imaging SATellite |
| RMSE | Root Mean Squared Error |
| RSM | Relative Soil Moisture |
| SAR | Synthetic Aperture Radar |
| SH | Spatial heterogeneity index |
| SM | Soil Moisture |
| SMAP | Soil Moisture Active Passive |
| SMOS | Soil Moisture and Ocean Salinity |
| ST | Soil Texture |
| VWC | Vegetation Water Content |
| WCC | Water Change Capacity |
References
- Lakshmi, V. Remote Sensing of Soil Moisture. ISRN Soil Sci. 2013, 2013. [Google Scholar] [CrossRef]
- Al-Yaari, A.; Wigneron, J.P.; Ducharne, A.; Kerr, Y.; De Rosnay, P.; De Jeu, R.; Govind, A.; Al Bitar, A.; Albergel, C.; Munoz-Sabater, J.; et al. Global-scale evaluation of two satellite-based passive microwave soil moisture datasets (SMOS and AMSR-E) with respect to Land Data Assimilation System estimates. Remote Sens. Environ. 2014, 149, 181–195. [Google Scholar] [CrossRef]
- Chaurasia, S.; Tung, D.T.; Thapliyal, P.; Joshi, P. Assessment of the AMSR-E soil moisture product over India. Int. J. Remote Sens. 2011, 32, 7955–7970. [Google Scholar] [CrossRef]
- Liu, Y.; Dorigo, W.; Parinussa, R.; De Jeu, R.; Wagner, W.; McCabe, M.; Evans, J.; Van Dijk, A. Trend-preserving blending of passive and active microwave soil moisture retrievals. Remote Sens. Environ. 2012, 123, 280–297. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Richaume, P.; Wigneron, J.P.; Ferrazzoli, P.; Mahmoodi, A.; Al Bitar, A.; Cabot, F.; Gruhier, C.; Juglea, S.E.; et al. The SMOS soil moisture retrieval algorithm. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1384–1403. [Google Scholar] [CrossRef]
- Brocca, L.; Hasenauer, S.; Lacava, T.; Melone, F.; Moramarco, T.; Wagner, W.; Dorigo, W.; Matgen, P.; Martínez-Fernández, J.; Llorens, P.; et al. Soil moisture estimation through ASCAT and AMSR-E sensors: An intercomparison and validation study across Europe. Remote Sens. Environ. 2011, 115, 3390–3408. [Google Scholar] [CrossRef]
- Albergel, C.; de Rosnay, P.; Gruhier, C.; Muñoz-Sabater, J.; Hasenauer, S.; Isaksen, L.; Kerr, Y.; Wagner, W. Evaluation of remotely sensed and modelled soil moisture products using global ground-based in situ observations. Remote Sens. Environ. 2012, 118, 215–226. [Google Scholar] [CrossRef]
- Moran, S.; Hymer, D.; Qi, J.; Sano, E. Soil moisture evaluation using multi-temporal synthetic aperture radar (SAR) in semiarid rangeland. Agric. For. Meteorol. 2000, 105, 69–80. [Google Scholar] [CrossRef]
- Quesney, A.; Le Hégarat-Mascle, S.; Taconet, O.; Vidal-Madjar, D.; Wigneron, J.; Loumagne, C.; Normand, M. Estimation of watershed soil moisture index from ERS/SAR data. Remote Sens. Environ. 2000, 72, 290–303. [Google Scholar] [CrossRef]
- Oldak, A.; Jackson, T.; Starks, P.; Elliott, R. Mapping near-surface soil moisture on regional scale using ERS-2 SAR data. Int. J. Remote Sens. 2003, 24, 4579–4598. [Google Scholar] [CrossRef]
- Zribi, M.; Kotti, F.; Amri, R.; Wagner, W.; Shabou, M.; Lili-Chabaane, Z.; Baghdadi, N. Soil moisture mapping in a semiarid region, based on ASAR/Wide Swath satellite data. Water Resour. Res. 2014, 50, 823–835. [Google Scholar] [CrossRef]
- Merlin, O.; Walker, J.P.; Chehbouni, A.; Kerr, Y. Towards deterministic downscaling of SMOS soil moisture using MODIS derived soil evaporative efficiency. Remote Sens. Environ. 2008, 112, 3935–3946. [Google Scholar] [CrossRef]
- Blöschl, G.; Komma, J.; Hasenauer, S. Hydrological downscaling of soil moisture. In Final Report to H-Sat (Hydrology Satellite Application Facility) via the Austrian Central Institute for meteorology and Geodynamics (ZAMG); Vienna University of Technology: Vienna, Austria, 2009. [Google Scholar]
- Piles, M.; Camps, A.; Vall-Llossera, M.; Corbella, I.; Panciera, R.; Rudiger, C.; Kerr, Y.H.; Walker, J. Downscaling SMOS-derived soil moisture using MODIS visible/infrared data. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3156–3166. [Google Scholar] [CrossRef]
- Merlin, O.; Rüdiger, C.; Al Bitar, A.; Richaume, P.; Walker, J.P.; Kerr, Y.H. Disaggregation of SMOS soil moisture in Southeastern Australia. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1556–1571. [Google Scholar] [CrossRef]
- Nagarajan, K.; Judge, J. Spatial scaling and variability of soil moisture over heterogeneous land cover and dynamic vegetation conditions. IEEE Geosci. Remote Sens. Lett. 2013, 10, 880–884. [Google Scholar] [CrossRef]
- Molero, B.; Merlin, O.; Malbéteau, Y.; Al Bitar, A.; Cabot, F.; Stefan, V.; Kerr, Y.; Bacon, S.; Cosh, M.H.; Bindlish, R. SMOS disaggregated soil moisture product at 1km resolution: Processor overview and first validation results. Remote Sens. Environ. 2016, 180, 361–376. [Google Scholar] [CrossRef]
- Reichle, R.H.; Entekhabi, D.; McLaughlin, D.B. Downscaling of radio brightness measurements for soil moisture estimation: A four-dimensional variational data assimilation approach. Water Resour. Res. 2001, 37, 2353–2364. [Google Scholar] [CrossRef]
- Liu, Y.; Parinussa, R.; Dorigo, W.; De Jeu, R.; Wagner, W.; Van Dijk, A.; McCabe, M.; Evans, J. Developing an improved soil moisture dataset by blending passive and active microwave satellite-based retrievals. Hydrol. Earth Syst. Sci. 2011, 15, 425–436. [Google Scholar] [CrossRef]
- Kim, G.; Barros, A.P. Downscaling of remotely sensed soil moisture with a modified fractal interpolation method using contraction mapping and ancillary data. Remote Sens. Environ. 2002, 83, 400–413. [Google Scholar] [CrossRef]
- Balsamo, G.; Mahfouf, J.; Bélair, S.; Deblonde, G. A land data assimilation system for soil moisture and temperature: An information content study. J. Hydrometeorol. 2007, 8, 1225–1242. [Google Scholar] [CrossRef]
- Carrera, M.L.; Bélair, S.; Bilodeau, B. The Canadian Land Data Assimilation System (CaLDAS): Description and Synthetic Evaluation Study. J. Hydrometeorol. 2015. [Google Scholar] [CrossRef]
- Piles, M.; Entekhabi, D.; Camps, A. A change detection algorithm for retrieving high-resolution soil moisture from SMAP radar and radiometer observations. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4125–4131. [Google Scholar] [CrossRef]
- Das, N.N.; Entekhabi, D.; Njoku, E.G. An algorithm for merging SMAP radiometer and radar data for high-resolution soil-moisture retrieval. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1504–1512. [Google Scholar] [CrossRef]
- Das, N.N.; Entekhabi, D.; Njoku, E.G.; Shi, J.J.C.; Johnson, J.T.; Colliander, A. Tests of the SMAP combined radar and radiometer algorithm using airborne field campaign observations and simulated data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2018–2028. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Martinuzzi, J.; Font, J.; Berger, M. Soil moisture retrieval from space: The Soil Moisture and Ocean Salinity (SMOS) mission. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1729–1735. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Al-Yaari, A.; Rodriguez-Fernandez, N.; Parrens, M.; Molero, B.; Leroux, D.; Bircher, S.; Mahmoodi, A.; Mialon, A.; Richaume, P.; et al. Overview of SMOS performance in terms of global soil moisture monitoring after six years in operation. Remote Sens. Environ. 2016, 180, 40–63. [Google Scholar] [CrossRef]
- Al Bitar, A.; Leroux, D.; Kerr, Y.H.; Merlin, O.; Richaume, P.; Sahoo, A.; Wood, E.F. Evaluation of SMOS soil moisture products over continental US using the SCAN/SNOTEL network. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1572–1586. [Google Scholar] [CrossRef]
- Leroux, D.J.; Kerr, Y.H.; Al Bitar, A.; Bindlish, R.; Jackson, T.J.; Berthelot, B.; Portet, G. Comparison between SMOS, VUA, ASCAT, and ECMWF soil moisture products over four watersheds in US. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1562–1571. [Google Scholar] [CrossRef]
- Tomer, S.K.; Al Bitar, A.; Sekhar, M.; Zribi, M.; Bandyopadhyay, S.; Sreelash, K.; Sharma, A.; Corgne, S.; Kerr, Y. Retrieval and multi-scale validation of soil moisture from multi-temporal SAR data in a semi-arid tropical region. Remote Sens. 2015, 7, 8128–8153. [Google Scholar] [CrossRef]
- Morena, L.; James, K.; Beck, J. An introduction to the RADARSAT-2 mission. Can. J. Remote Sens. 2004, 30, 221–234. [Google Scholar] [CrossRef]
- Kottek, M.; Grieser, J.; Beck, C.; Rudolf, B.; Rubel, F. World map of the Köppen-Geiger climate classification updated. Meteorol. Z. 2006, 15, 259–263. [Google Scholar] [CrossRef]
- Karnataka State Remote Sensing Application Centre. Report on State Natural Resources Information System; Technical Report; Department of IT, BT and S & T, Government of Karnataka: Bangalore, India, 2007.
- Sreelash, K.; Sekhar, M.; Ruiz, L.; Tomer, S.; Guérif, M.; Buis, S.; Durand, P.; Gascuel-Odoux, C. Parameter estimation of a two-horizon soil profile by combining crop canopy and surface soil moisture observations using GLUE. J. Hydrol. 2012, 456, 57–67. [Google Scholar] [CrossRef]
- Sreelash, K.; Sekhar, M.; Ruiz, L.; Buis, S.; Bandyopadhyay, S. Improved modeling of groundwater recharge in agricultural watersheds using a combination of crop model and remote sensing. J. Indian Inst. Sci. 2013, 93, 189–207. [Google Scholar]
- Haines, W.B. Studies in the physical properties of soil. V. The hysteresis effect in capillary properties, and the modes of moisture distribution associated therewith. J. Agric. Sci. 1930, 20, 97–116. [Google Scholar] [CrossRef]
- Reichle, R.H.; Koster, R.D. Bias reduction in short records of satellite soil moisture. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Merlin, O.; Al Bitar, A.; Walker, J.P.; Kerr, Y. A sequential model for disaggregating near-surface soil moisture observations using multi-resolution thermal sensors. Remote Sens. Environ. 2009, 113, 2275–2284. [Google Scholar] [CrossRef]
- Baghdadi, N.; Cerdan, O.; Zribi, M.; Auzet, V.; Darboux, F.; El Hajj, M.; Bou Kheir, R. Operational performance of current synthetic aperture radar sensors in mapping soil surface characteristics in agricultural environments: Application to hydrological and erosion modelling. Hydrol. Process. 2008, 22, 9–20. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Date | Mean RADARSAT-2 SM (m/m) | SMOS SM (m/m) | No. | Date | Mean RADARSAT-2 SM (m/m) | SMOS SM (m/m) |
|---|---|---|---|---|---|---|---|
| 1 | 22 December 2009 | 0.127 | - | 16 | 17 October 2011 | 0.192 | 0.228 |
| 2 | 15 January 2010 | 0.119 | - | 17 | 10 November 2011 | 0.134 | - |
| 3 | 8 February 2010 | 0.107 | 0.067 | 18 | 7 July 2012 | 0.095 | 0.123 |
| 4 | 4 March 2010 | 0.111 | 0.125 | 19 | 31 July 2012 | 0.096 | 0.014 |
| 5 | 21 April 2010 | 0.138 | - | 20 | 24 August 2012 | 0.105 | - |
| 6 | 15 May 2010 | 0.121 | 0.049 | 21 | 17 September 2012 | 0.125 | 0.045 |
| 7 | 12 September 2010 | 0.192 | - | 22 | 11 October 2012 | 0.127 | - |
| 8 | 6 October 2010 | 0.161 | 0.183 | 23 | 4 November 2012 | 0.191 | 0.298 |
| 9 | 30 October 2010 | 0.184 | 0.245 | 24 | 28 November 2012 | 0.151 | 0.165 |
| 10 | 26 May 2011 | 0.205 | 0.205 | 25 | 8 June 2013 | 0.142 | 0.154 |
| 11 | 19 June 2011 | 0.198 | - | 26 | 2 July 2013 | 0.162 | 0.176 |
| 12 | 13 July 2011 | 0.159 | - | 27 | 26 July 2013 | 0.199 | 0.219 |
| 13 | 6 August 2011 | 0.173 | 0.169 | 28 | 19 August 2013 | 0.167 | 0.107 |
| 14 | 30 August 2011 | 0.147 | - | 29 | 12 September 2013 | 0.174 | - |
| 15 | 23 September 2011 | 0.113 | 0.028 | 30 | 6 October 2013 | 0.130 | - |
| No. | Experiment Name | k | |
|---|---|---|---|
| 1 | F-Linear | Mean of | – |
| 2 | F-Cal | Mean of | Calibrated |
| 3 | C-Linear | – | |
| 4 | C-Cal | Calibrated |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tomer, S.K.; Al Bitar, A.; Sekhar, M.; Zribi, M.; Bandyopadhyay, S.; Kerr, Y. MAPSM: A Spatio-Temporal Algorithm for Merging Soil Moisture from Active and Passive Microwave Remote Sensing. Remote Sens. 2016, 8, 990. https://doi.org/10.3390/rs8120990
Tomer SK, Al Bitar A, Sekhar M, Zribi M, Bandyopadhyay S, Kerr Y. MAPSM: A Spatio-Temporal Algorithm for Merging Soil Moisture from Active and Passive Microwave Remote Sensing. Remote Sensing. 2016; 8(12):990. https://doi.org/10.3390/rs8120990
Chicago/Turabian StyleTomer, Sat Kumar, Ahmad Al Bitar, Muddu Sekhar, Mehrez Zribi, Soumya Bandyopadhyay, and Yann Kerr. 2016. "MAPSM: A Spatio-Temporal Algorithm for Merging Soil Moisture from Active and Passive Microwave Remote Sensing" Remote Sensing 8, no. 12: 990. https://doi.org/10.3390/rs8120990
APA StyleTomer, S. K., Al Bitar, A., Sekhar, M., Zribi, M., Bandyopadhyay, S., & Kerr, Y. (2016). MAPSM: A Spatio-Temporal Algorithm for Merging Soil Moisture from Active and Passive Microwave Remote Sensing. Remote Sensing, 8(12), 990. https://doi.org/10.3390/rs8120990