
Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture

 ,
,  ,
,  ,
,  ,
,  ,
, 
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Experimental Site
2.2. Remote Sensing Platforms
2.2.1. UAV Images

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | AIRCRAFT | SATELLITE | |
|---|---|---|---|
| Platform | Mikrokopter OktoXL | Sky Arrow 650 TC/P68 | RapidEye |
| Camera | Tetracam ADC Lite  | ASPIS  | REIS 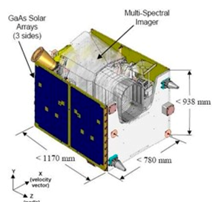 |
| Number of channels | 3 | 12 | 5 |
| Spectral wavebands | 520–600 nm 630–690 nm 760–900 nm | 415–425 nm 526–536 nm 545–555 nm 565–575 nm 695–705 nm 710–720 nm 745–755 nm 490–510 nm 670–690 nm 770–790 nm 790–810 nm 890–910 nm | 440–510 nm 520–590 nm 630–685 nm 690–730 nm 760–850 nm |
| Dimension | 114 × 77 × 22 mm | 270 × 250 × 200 mm | 656 × 361 × 824 mm |
| Weight | 0.2 kg | 10 kg | 62 kg |
| Resolution | 2048 × 1536 pixel | 2048 × 2048 pixel | 12000 pixel linear CCD per band |
| Pixel size | 3.2 μm | 7.4 μm | 6.5 µm |
| Focal length | 8.5 mm | 12 mm | 633 mm |
| FOV | 42.5° × 32.5° | 12.5° × 12.5° | 15.7° × 10.5° |
| Output data | 10 bit RAW | 8 bit RAW | 16 bit NITF |
| Image size | 6 MB | 4 MB | 462 MB/25 km along track for 5 bands. |
| Flight quote AGL | 150 m | 2300 m | 630 km |
| Flight speed | 4 m/s | 90 knot | - |
| Ground resolution | 0.05 m/pixel | 0.5 m/pixel | 5 m/pixel |
| Ground image dimension | 116.5 × 87.5 m | 1024 × 1024 m | 77 × 45 km |
| Total frames | 100 | 2 | 1 |
2.2.2. Aircraft Images
2.2.3. Satellite Images
2.3. Statistical Framework
2.4. Cost Analysis
- Acquisition costs (C) cover all the expenses to get the raw images. For the satellite this is the purchase price of the commercial image, for the aircraft it includes the cost of the flying vector and the expenses for the deployment of the sensor platform and payload, while for the UAV it includes also all the costs for organizing and conducting the acquisition campaign.
- Georeferencing and orthorectification (P1) includes the man-hour costs to obtain a georeferred and orthorectified image. The price for a single man-hour was considered at 50 Euros.
- Image processing (P2) covers all the correction and elaboration, priced in man-hour, needed to get the final results. The process is similar for each platform, the only difference is the different resolution (and hence computing time) of the three starting images, and the fact that satellite and usually aircraft images do not require soil filtering as their resolution do not permit distinguishing between vines and inter-row. Also for that phase 50 Euros per single man-hour was considered.
3. Results and Discussion
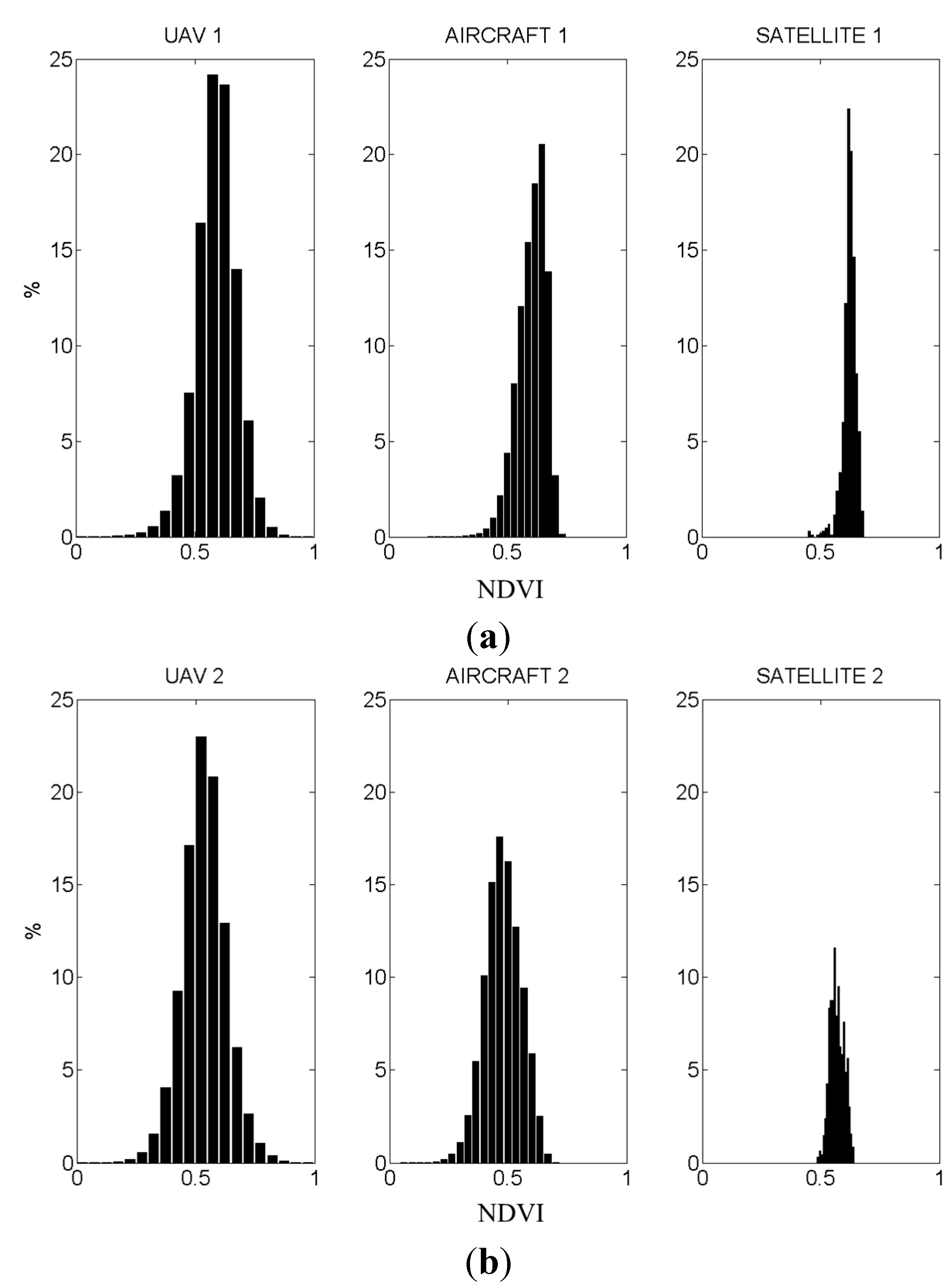
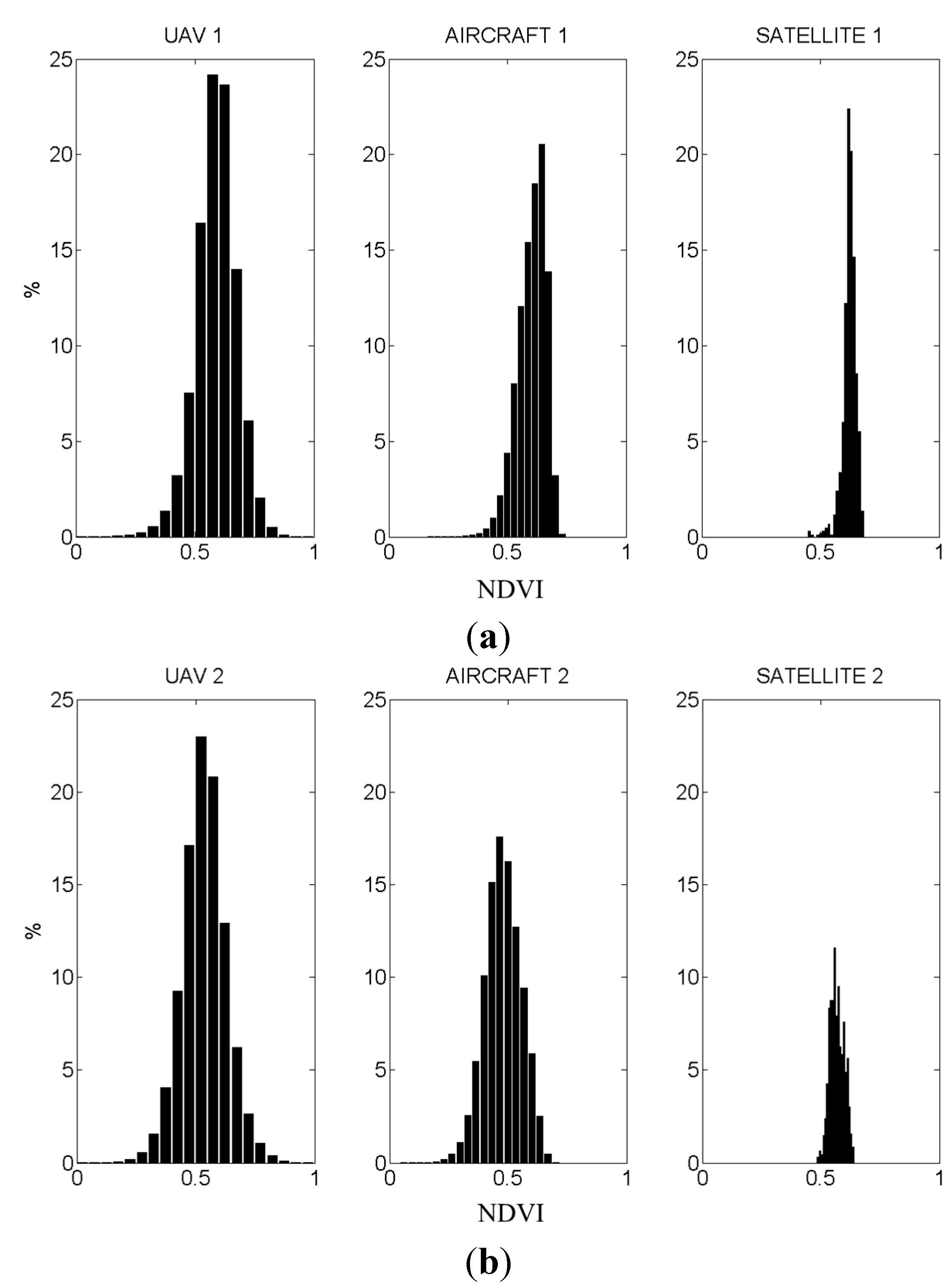
3.1. Histograms and Basic Statistics
| Platform | N. Values | Average | Standard Deviation | Skewness | CV (%) | Trend (NDVI) |
|---|---|---|---|---|---|---|
| V1–UAV | 4,956,789 | 0.589 | 0.08 | −0.38 | 14.61 | 0.00005 |
| V1–AIRCRAFT | 103,199 | 0.601 | 0.06 | −0.77 | 9.98 | 0.00054 |
| V1–SATELLITE | 1012 | 0.624 | 0.02 | −0.28 | 3.68 | 0.0014 |
| V2–UAV | 8,233,791 | 0.536 | 0.09 | −0.11 | 17.16 | 0.00037 |
| V2–AIRCRAFT | 96,588 | 0.477 | 0.07 | −0.77 | 15.93 | 0.00094 |
| V2-SATELLITE | 959 | 0.567 | 0.03 | 0.09 | 5.29 | 0.0044 |
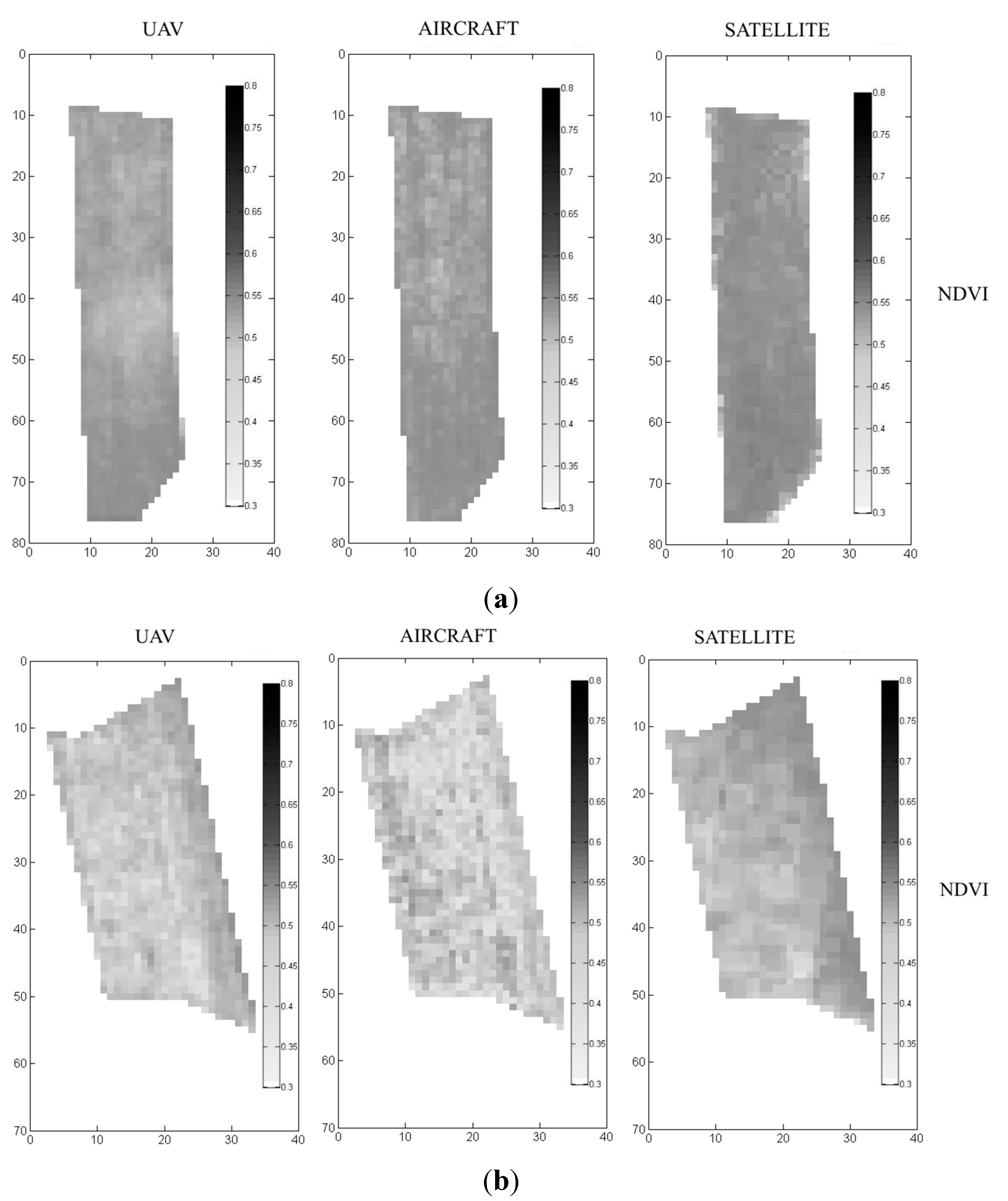
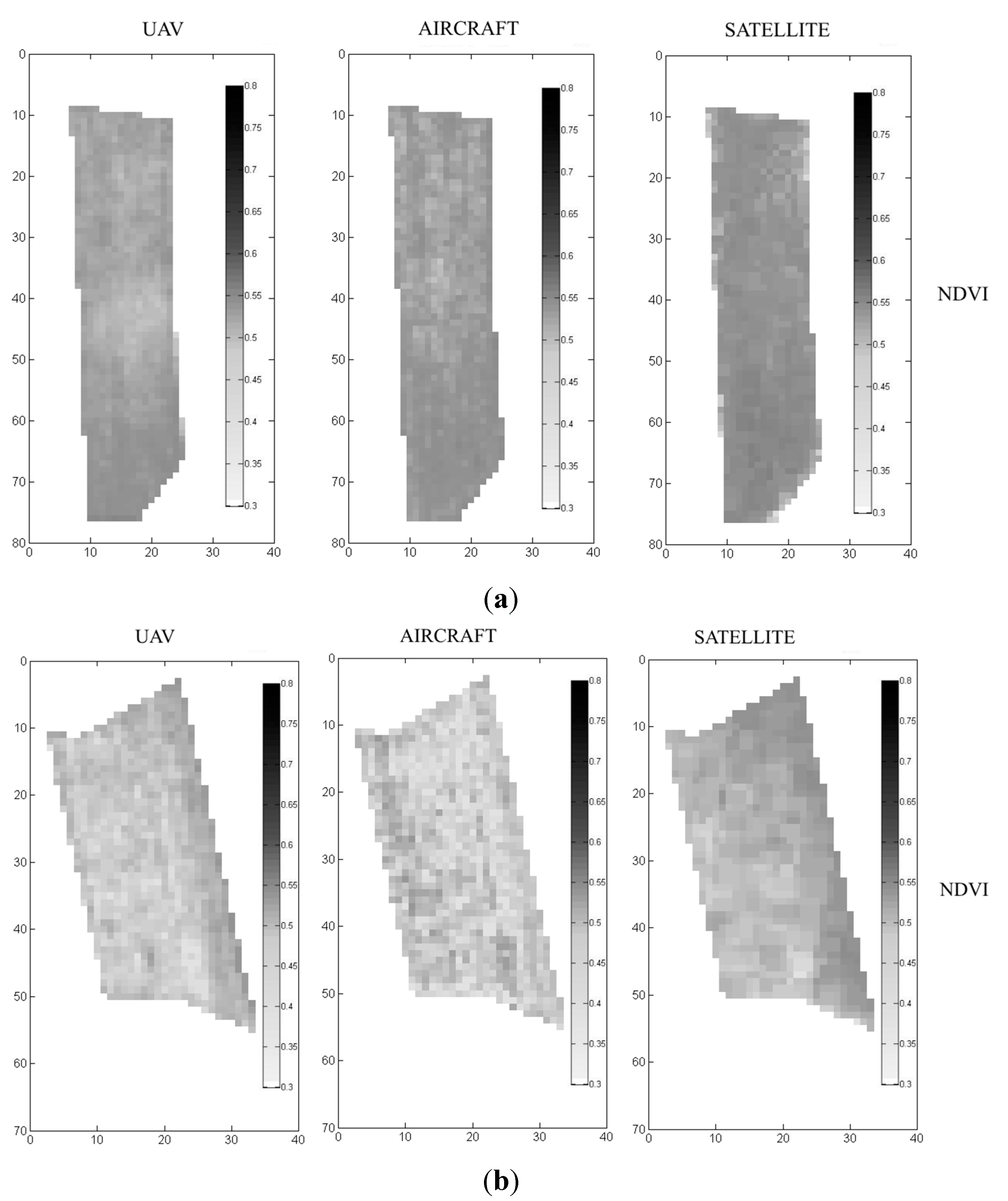
3.2. Coarse Resolution Inter-Comparison
| V1 | V2 | |||
|---|---|---|---|---|
| Pearson (R) | Lee (L) | Pearson (R) | Lee (L) | |
| SATELLITE vs. UAV | 0.286 | 0.246 | 0.799 | 0.701 |
| SATELLITE vs. AIRCRAFT | 0.426 | 0.346 | 0.776 | 0.689 |
| AIRCRAFT vs. UAV | 0.635 | 0.547 | 0.881 | 0.747 |
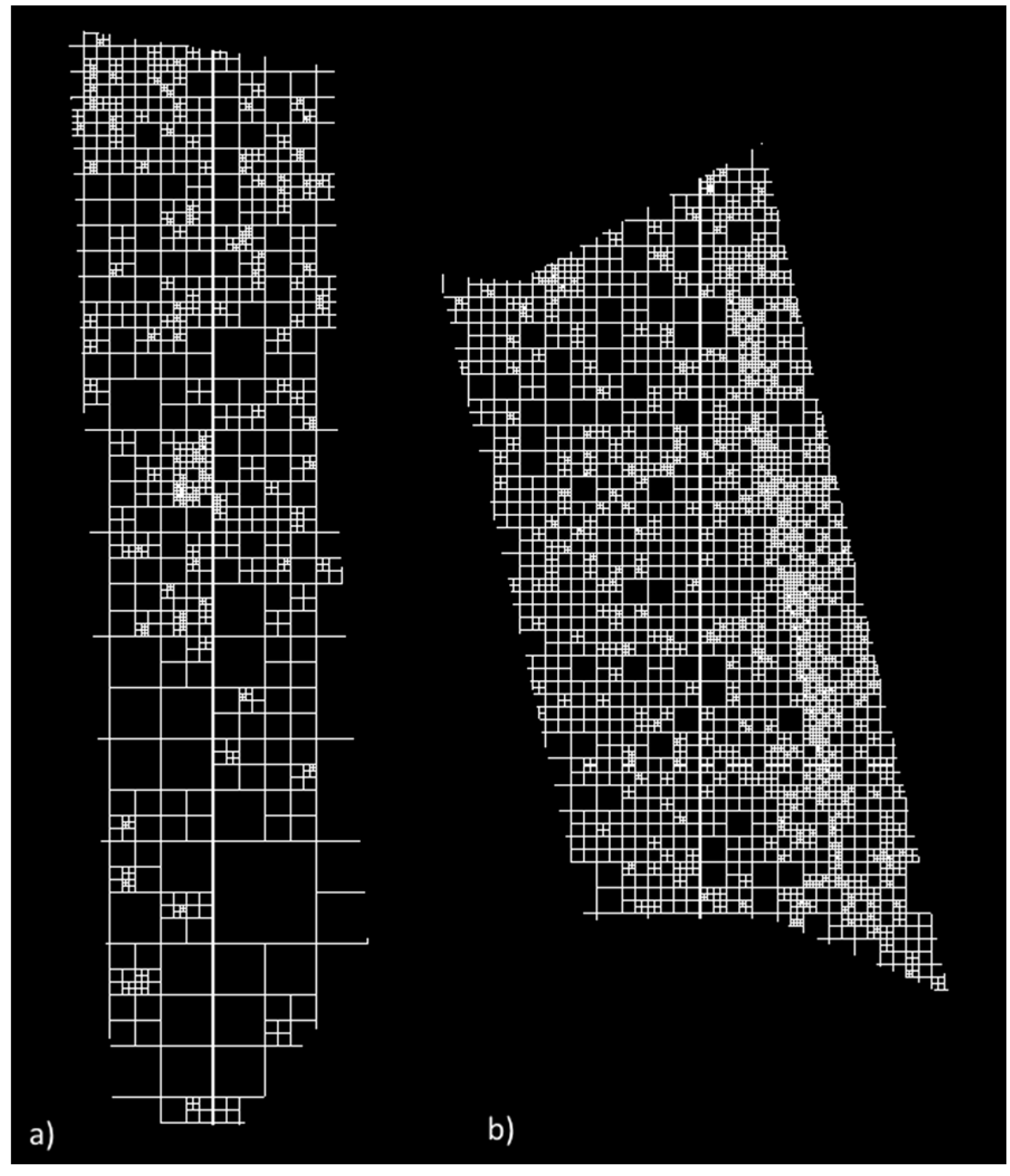
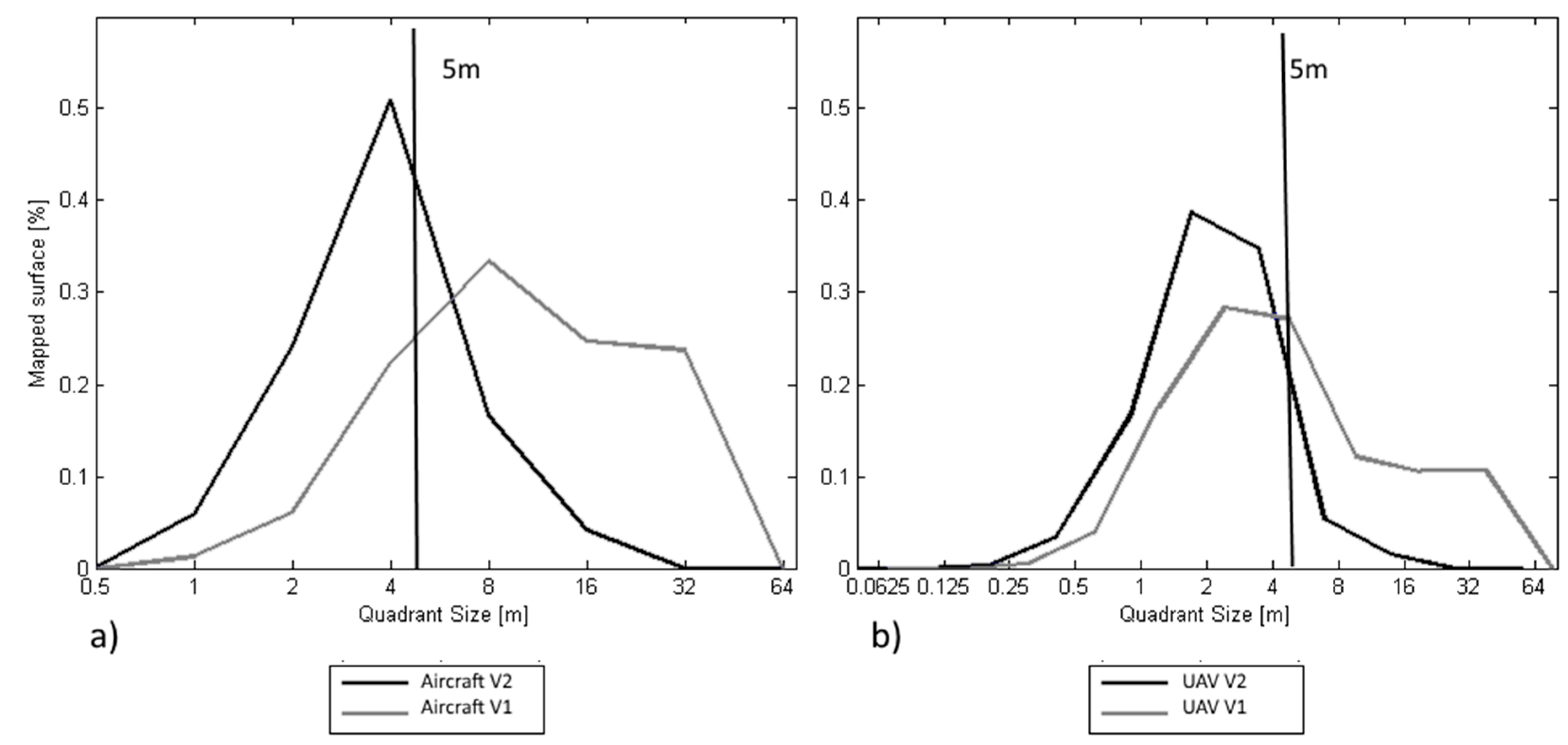
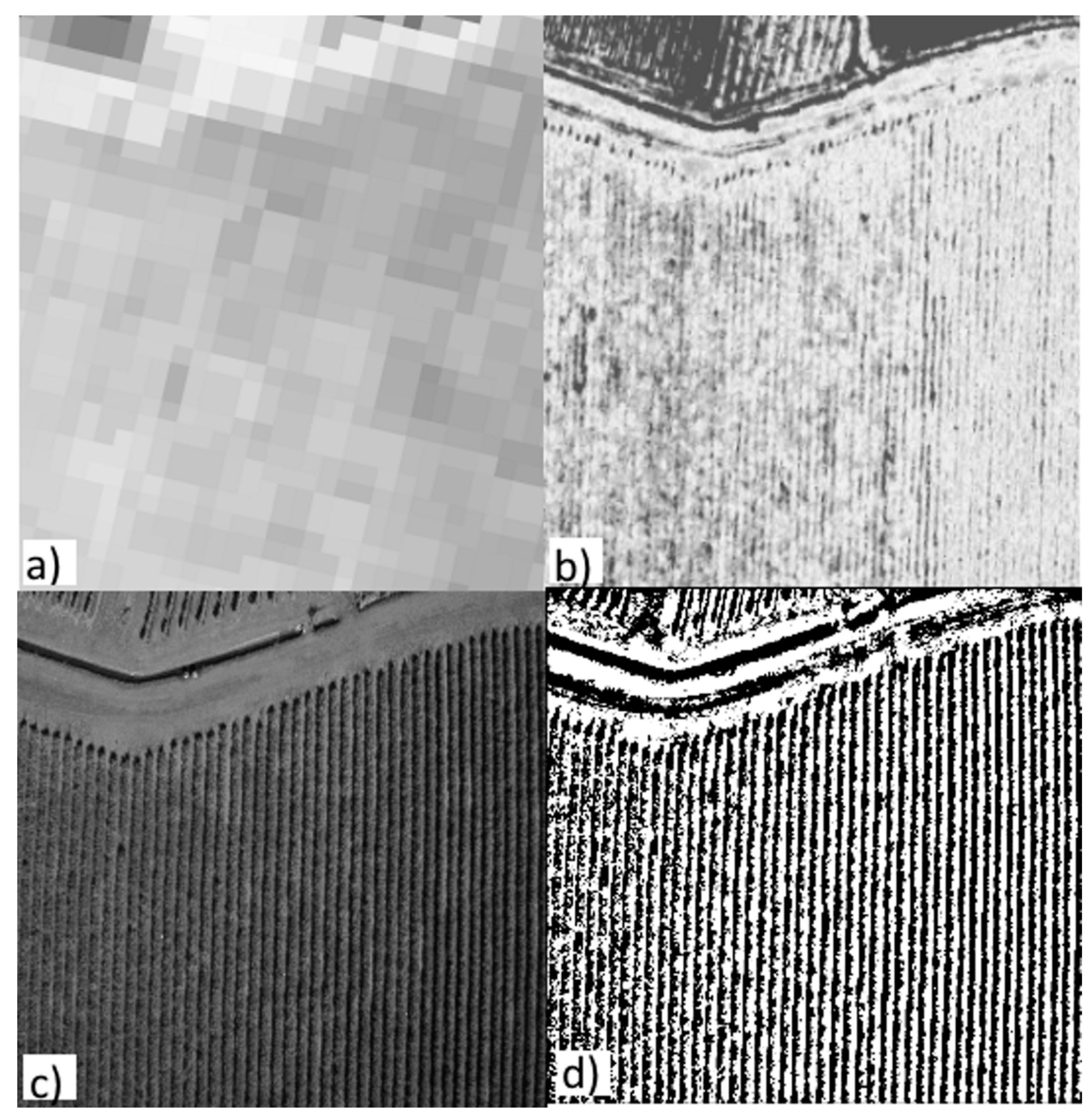
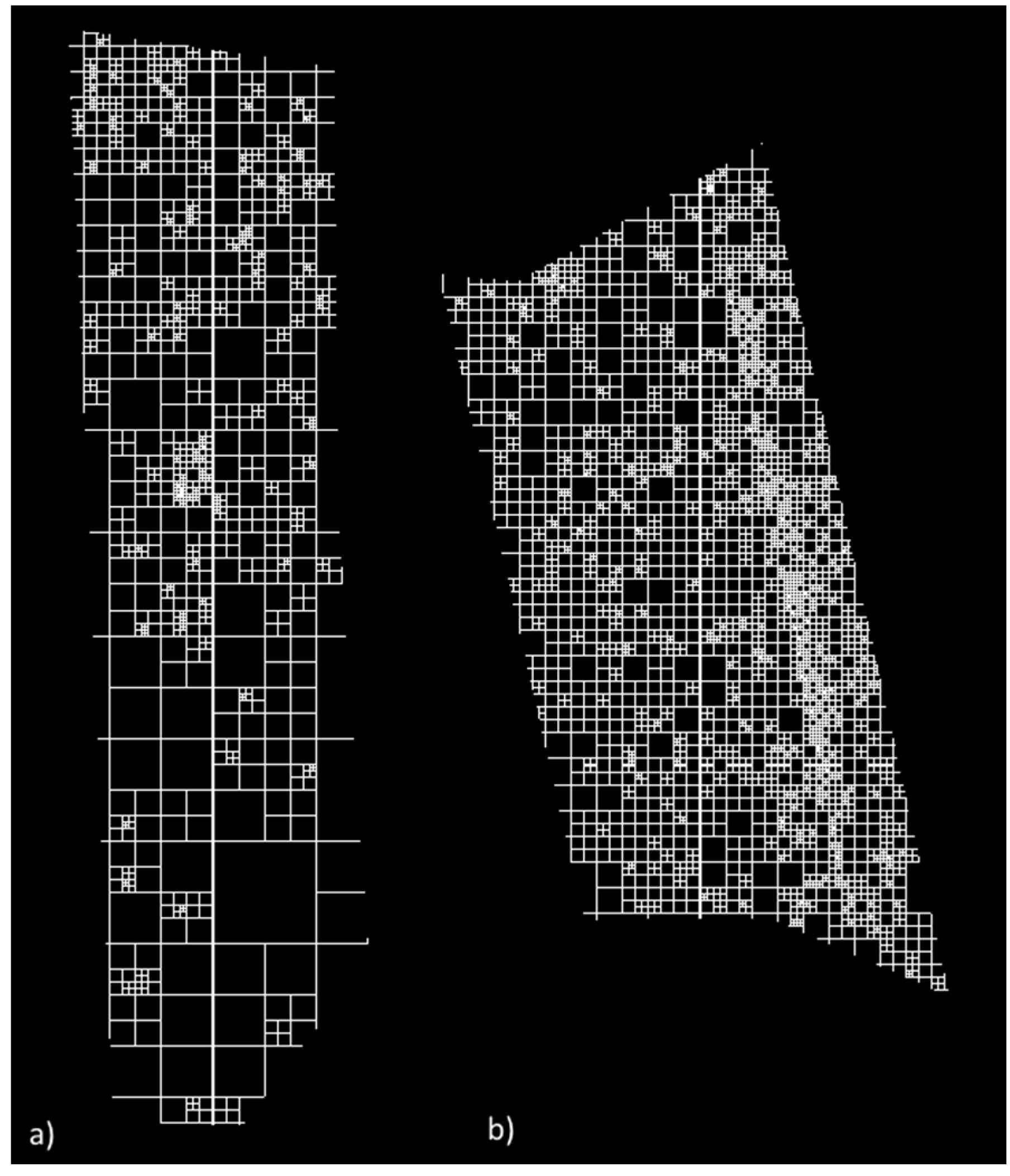
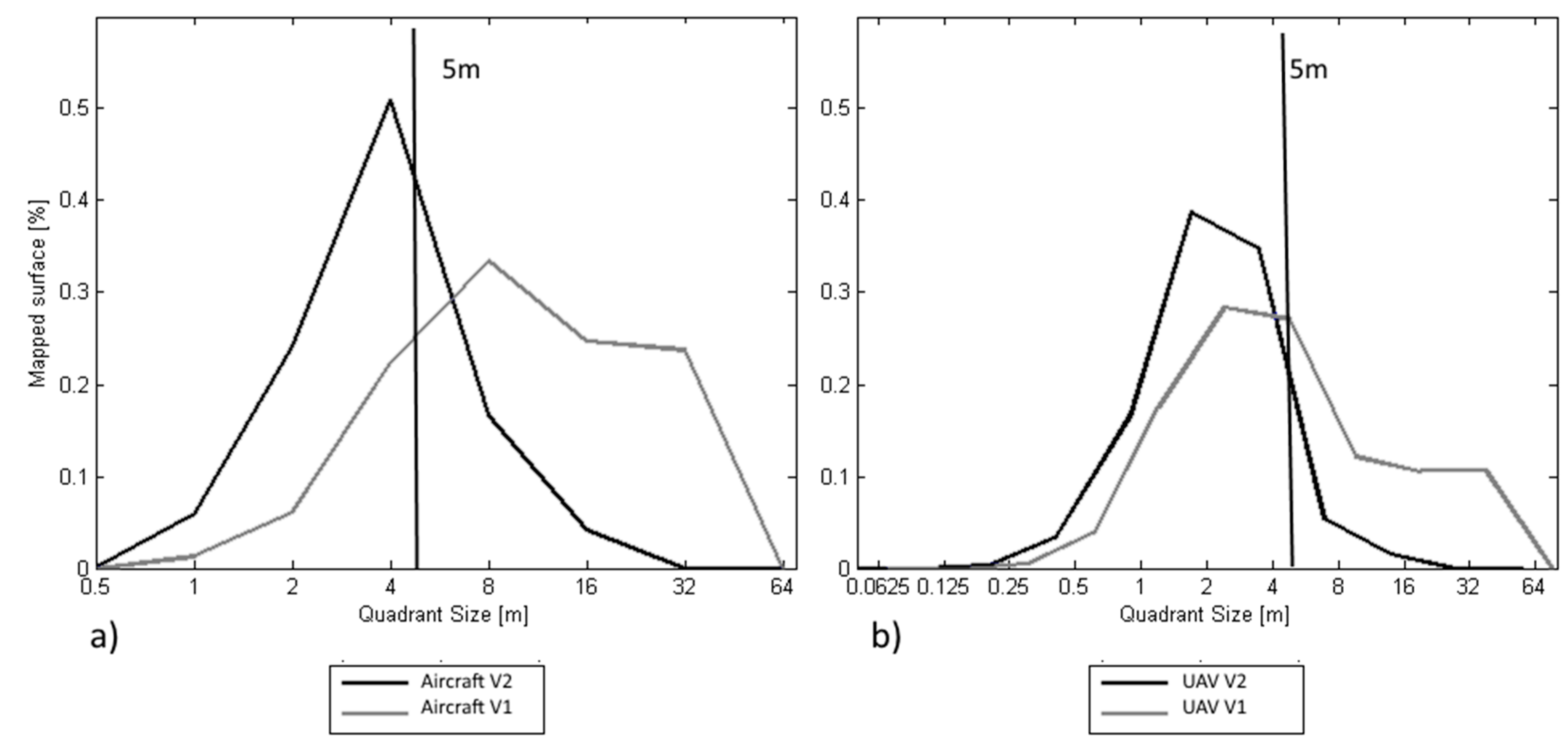
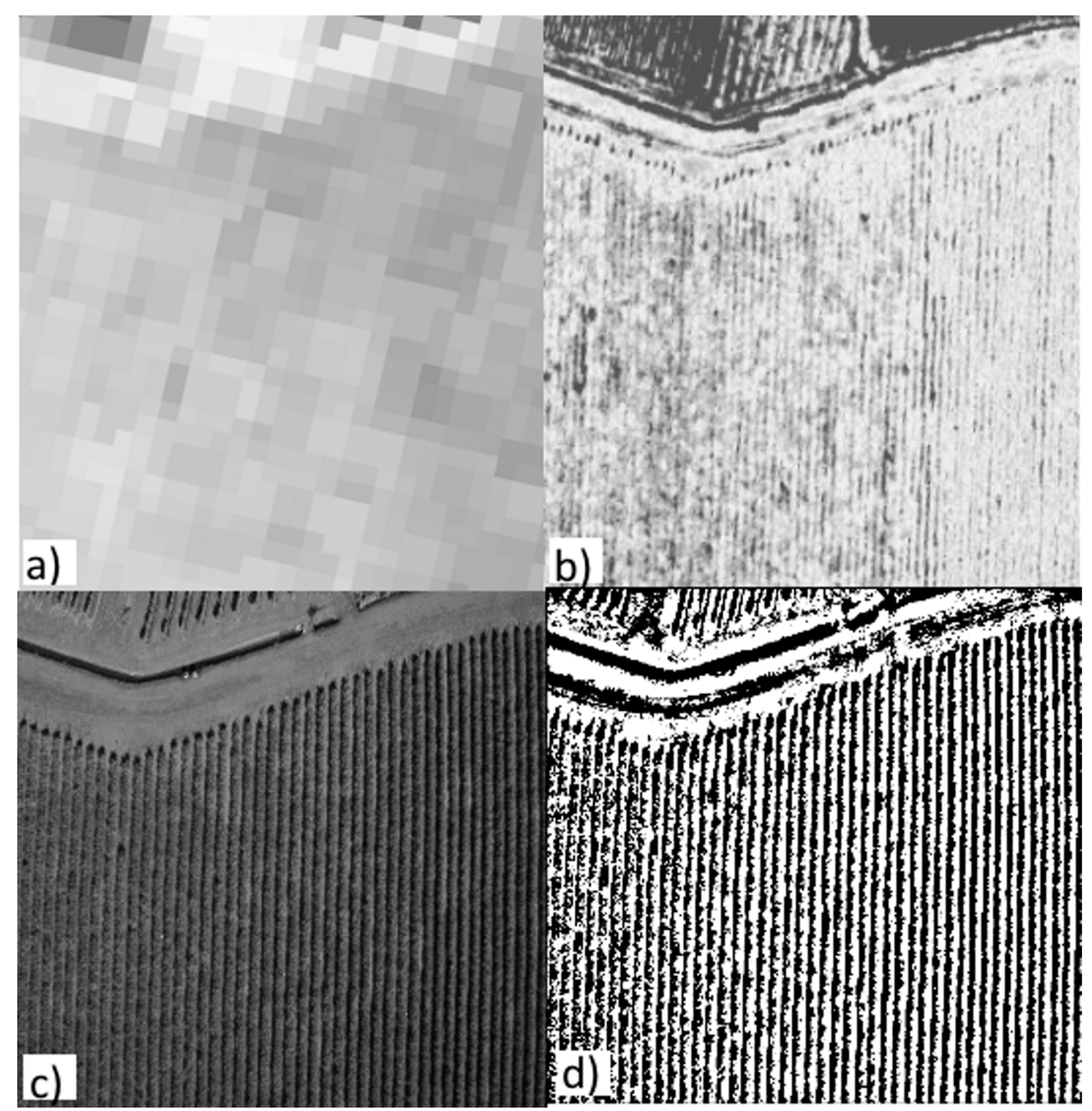
3.3. Image Decomposition
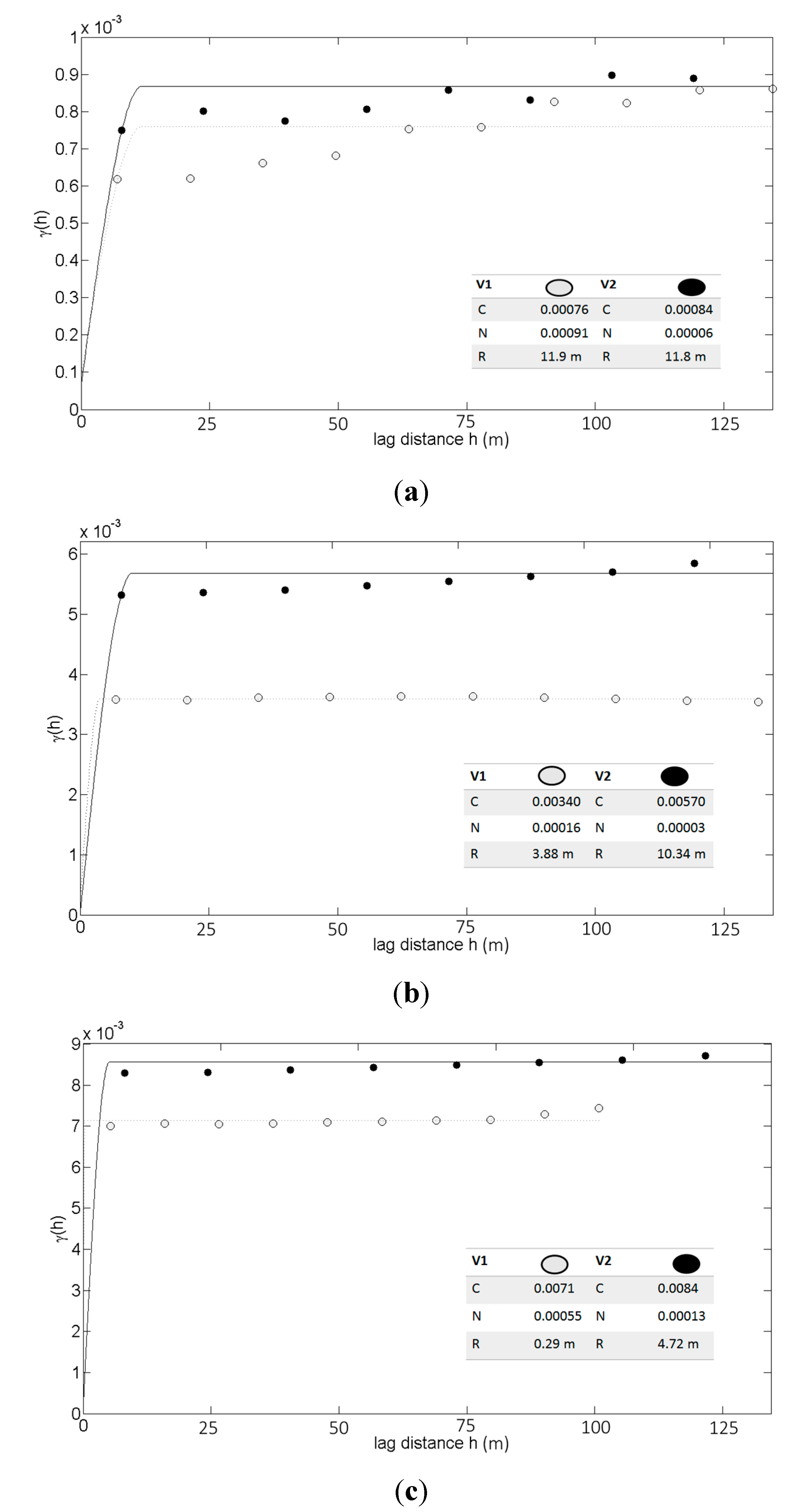
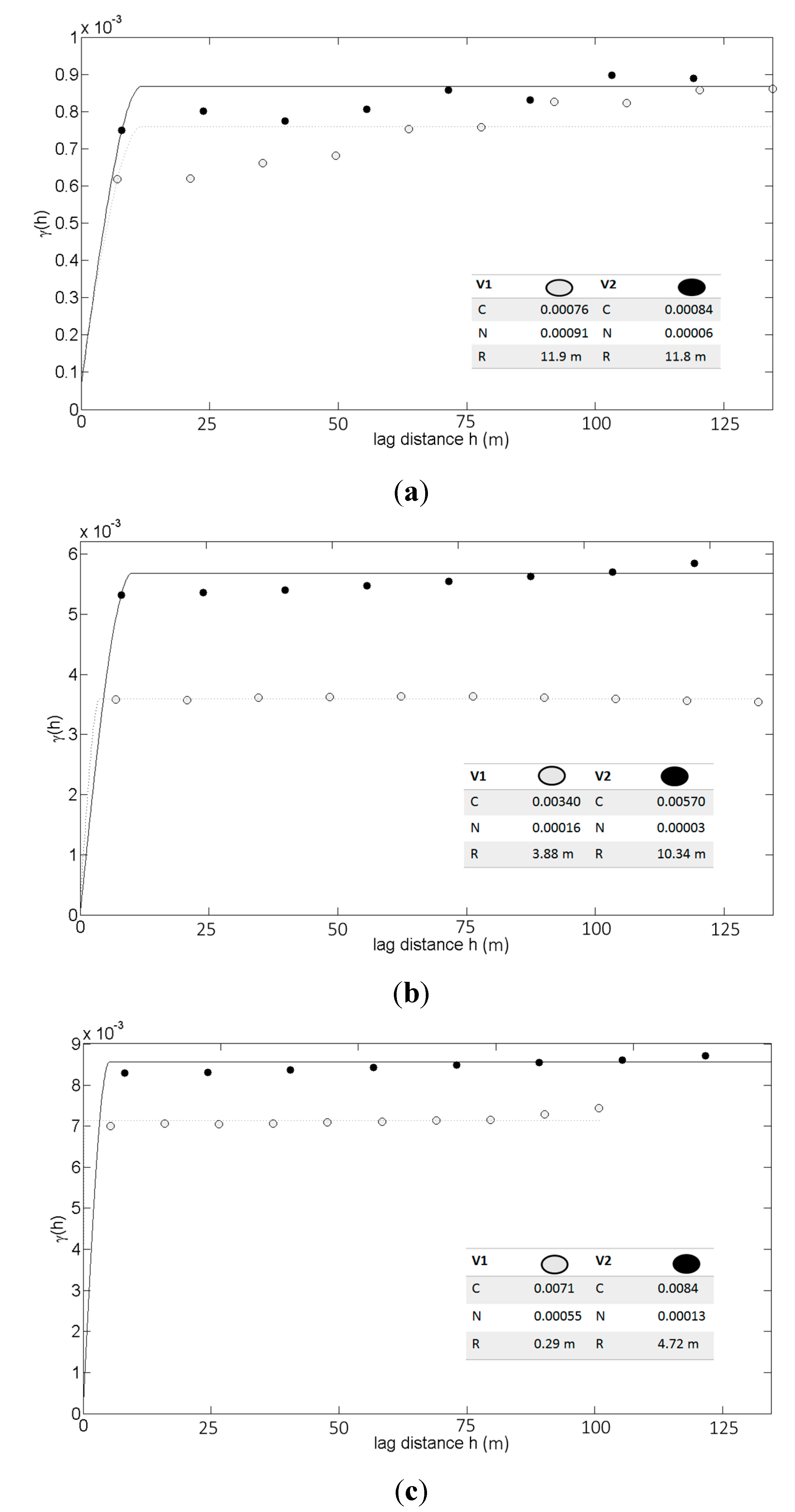
3.4. Variogram Analysis
3.5. Inter-Row Separation
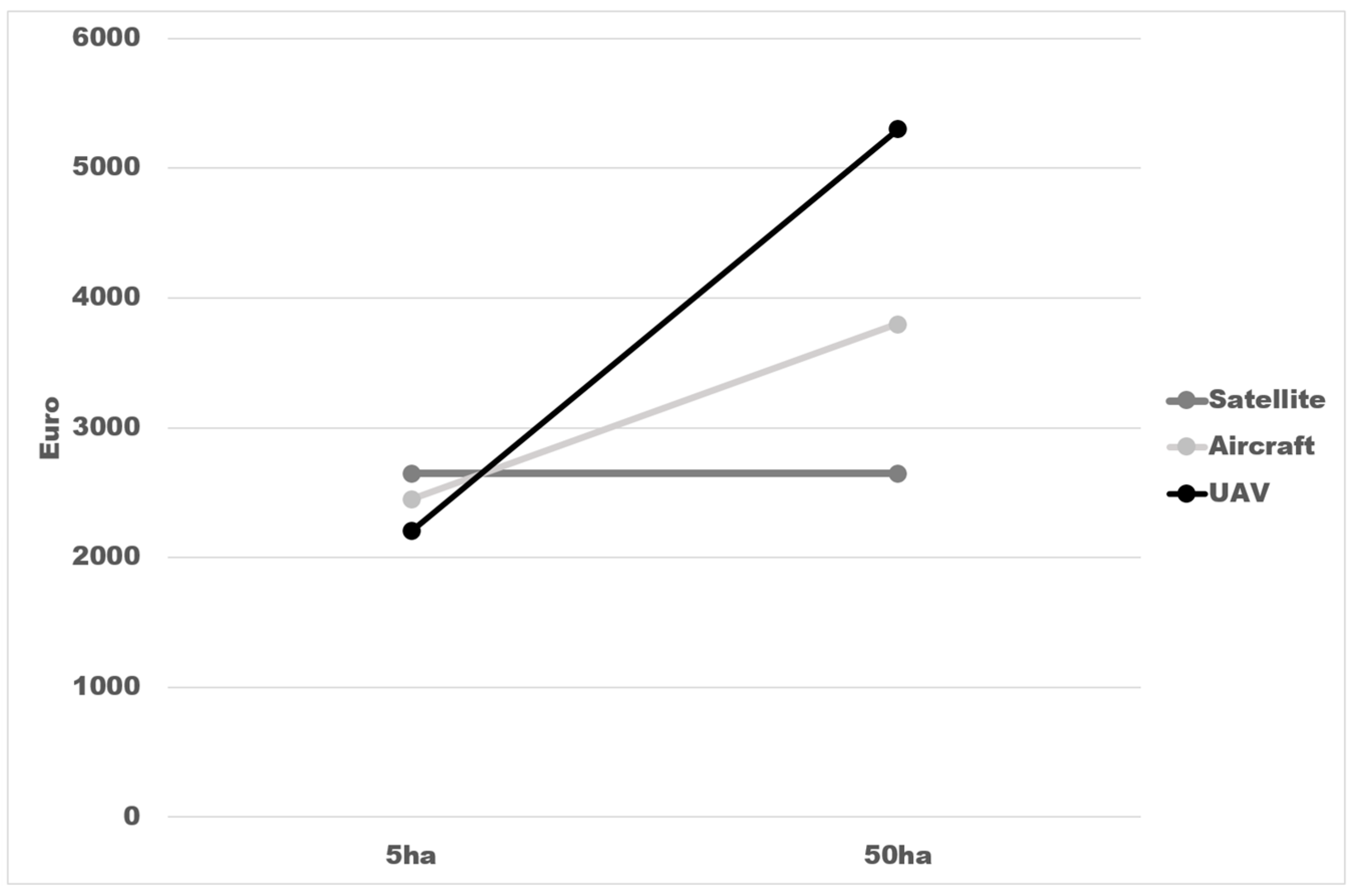
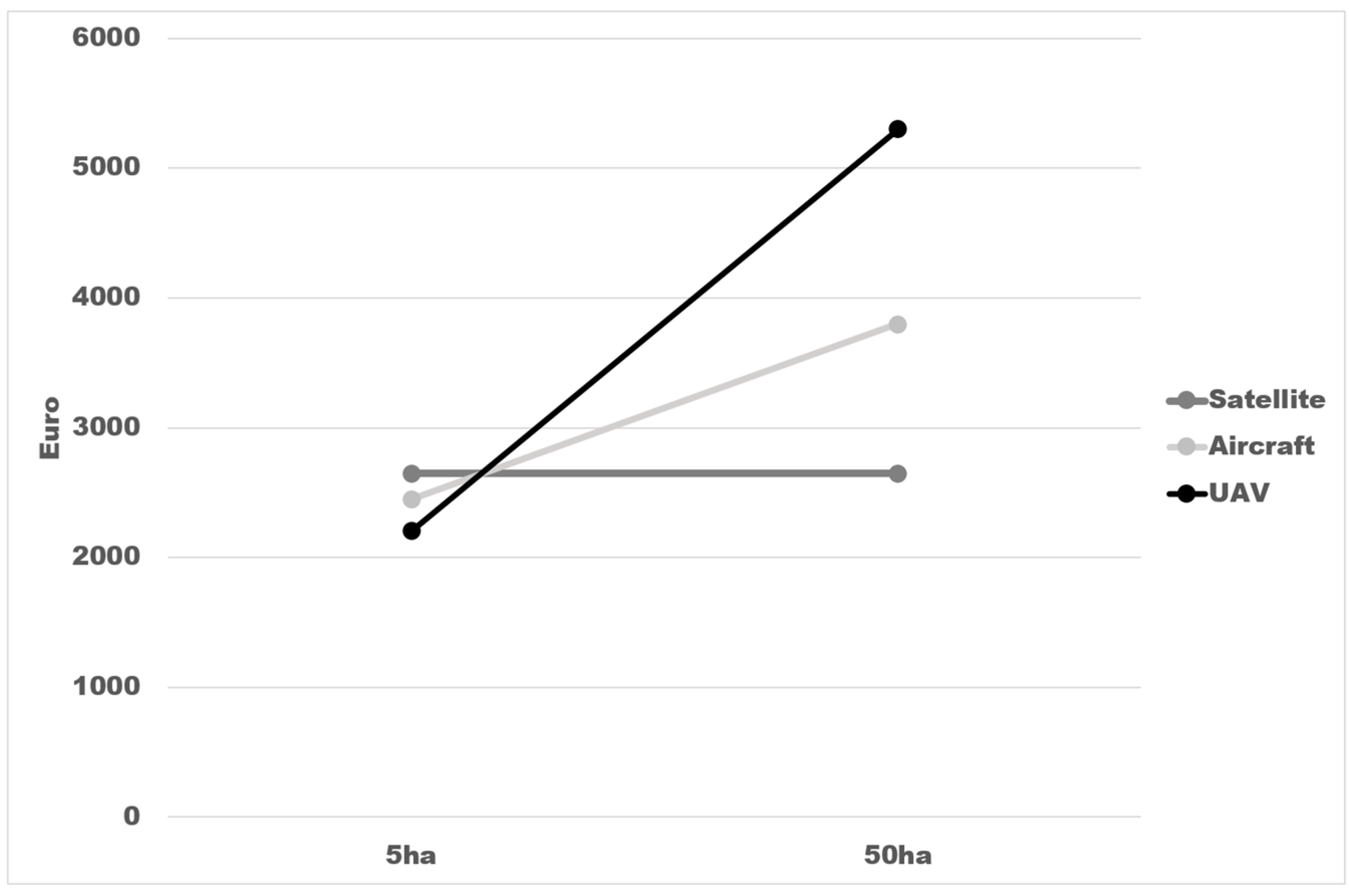
3.6. Acquisition and Processing Cost Analysis
| 5 ha | 50 ha | |||||||
|---|---|---|---|---|---|---|---|---|
| N | C | P1 | P2 | N | C | P1 | P2 | |
| Satellite | 1 | 2500 | 50 | 100 | 1 | 2500 | 50 | 100 |
| Aircraft | 1 | 2200 | 100 | 150 | 10 | 3000 | 500 | 300 |
| UAV | 100 | 1500 | 500 | 200 | 1000 | 4000 | 1000 | 300 |
| UAV | Aircraft | Satellite | ||
| Mission | Range | - | + | ++ |
| Flexibility | ++ | + | - | |
| Endurance | - | ++ | ++ | |
| Cloud cover dependency | ++ | + | - | |
| Reliability | o | + | ++ | |
| Processing | Payload | o | + | ++ |
| Resolution | ++ | + | o | |
| Precision | ++ | + | o | |
| Mosaicking and geocoding effort | - | o | ++ | |
| Processing time | o | + | + |
3.7. Operational Discussions
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Whelan, B.M.; McBratney, A.B. The “null hypothesis” of precision agriculture management. Precis. Agric. 2000, 2, 265–279. [Google Scholar] [CrossRef]
- Bramley, R.G.V.; Hamilton, R.P. Understanding variability in winegrape production systems. 1. Within vineyard variation in yield over several vintages. Aust. J. Grape Wine Res. 2004, 10, 32–45. [Google Scholar] [CrossRef]
- Salamí, E.; Barrado, C.; Pastor, E. UAV flight experiments applied to the remote sensing of vegetated areas. Remote Sens. 2014, 6, 11051–11081. [Google Scholar] [CrossRef]
- Kelcey, J.; Lucieer, A. Sensor correction of a 6-band multispectral imaging sensor for UAV. Remote Sens. 2012, 4, 1462–1493. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; González-Dugo, V.; Berni, J.A.J. Fluorescence, temperature and narrow-band indices acquired from a UAV platform for water stress detection using a micro-hyperspectral imager and a thermal camera. Remote Sens. Environ. 2012, 117, 322–337. [Google Scholar] [CrossRef]
- Primicerio, J.; Di Gennaro, S.F.; Fiorillo, E.; Genesio, L.; Lugato, E.; Matese, A.; Vaccari, F.P. A flexible unmanned aerial vehicle for precision agriculture. Precis. Agric. 2012, 13, 517–523. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Matese, A.; Capraro, F.; Primicerio, J.; Gualato, G.; Di Gennaro, S.F.; Agati, G. Mapping of vine vigor by UAV and anthocyanin content by a non-destructive fluorescence technique. In Proceedings of the 9th European Conference on Precision Agriculture (ECPA), Lleida, Spain, 7–11 July 2013.
- Hunt, E.R., Jr.; Hively, W.D.; Fujikawa, S.; Linden, D.; Daughtry, C.S.; McCarty, G. Acquisition of NIR-Green-Blue digital photographs from unmanned aircraft for crop monitoring. Remote Sens. 2010, 2, 290–305. [Google Scholar] [CrossRef]
- Berni, J.; Zarco-Tejada, P.; Suarez, L.; Fereres, E. Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef]
- Goward, S.N.; Markham, B.; Dye, D.G.; Dulaney, W.; Yang, J. Normalized difference vegetation index measurements from the advanced very high resolution radiometer. Remote Sens. Environ. 1991, 35, 257–277. [Google Scholar] [CrossRef]
- Gioli, B.; Miglietta, F.; Vaccari, F.P.; Zaldei, A.; de Martino, B. The sky arrow ERA, an innovative airborne platform to monitor mass, momentum and energy exchange of ecosystems. Ann. Geophys. 2006, 49, 109–116. [Google Scholar]
- Papale, D.; Belli, C.; Gioli, B.; Miglietta, F.; Ronchi, C.; Vaccari, F.P.; Valentini, R. ASPIS, A flexible multispectral system for airborne remote sensing environmental applications. Sensors 2008, 8, 3240–3256. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. In Proceedings of the Third ERTS Symposium, NASA SP-351, Washington, DC, USA, 10–14 December 1973.
- Pringle, M.J.; McBratney, A.B.; Whelan, B.M.; Taylor, J.A. A preliminary approach to assessing the opportunity for site-specific crop management in a field, using yield monitor data. Agric. Syst. 2003, 76, 273–292. [Google Scholar] [CrossRef]
- Matlab Central (Experimental (Semi-) Variogram function by Wolfgang Schwanghart). Available online: http://www.mathworks.com/matlabcentral/fileexchange/20355-experimental-semi-variogram (accessed on 1 September 2014).
- Matlab Central (variogramfit function by Wolfgang Schwanghart). Available online: Http://www.mathworks.com/matlabcentral/fileexchange/25948-variogramfit (accessed on 1 September 2014).
- Visser, H.; de Nijs, T. The map comparison kit. Environ. Modell. Softw. 2006, 21, 346–358. [Google Scholar] [CrossRef]
- Lee, S.I. Developing a bivariate spatial association measure: An integration of Pearson’s r and Moran’s I. J. Geogr. Syst. 2001, 3, 369–385. [Google Scholar] [CrossRef]
- Moran, P.A.P. The interpretation of statistical maps. J. R. Statist. Soc. 1948, 37, 243–251. [Google Scholar]
- Valerdi, R.; Merrill, J.; Maloney, P. Cost metrics for unmanned aerial vehicles. In Proceedings of the AIAA 16th Lighter-Than-Air Systems Technology Conference and Balloon Systems Conference, Arlington, VA, USA, 26–28 September 2005.
- Garrigues, S.; Allard, D.; Baret, F.; Weiss, M. Quantifying spatial heterogeneity at the landscape scale using variogram models. Remote Sens. Environ. 2006, 103, 81–96. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B.; Aït Hssaïne, A. Monitoring soil erosion in the Souss Basin, Morocco, with a multiscale object-based remote sensing approach using UAV and satellite data. In Proceedings of the 1st World Sustainability Forum, Sciforum Electronic Conference Series, 1–30 November 2011; Available online: http://www.sciforum.net/conference/wsf/paper/562 (accessed on 9 March 2015).
- Hall, A.; Lamb, D.W.; Holzapfel, B.; Louis, J. Optical remote sensing applications in viticulture–A review. Aust. J. Grape Wine Res. 2002, 8, 36–47. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; González-Dugo, V.; Williams, L.E.; Suárez, L.; Berni, J.A.J.; Goldhamer, D.; Fereres, E. A PRI-based water stress index combining structural and chlorophyll effects: Assessment using diurnal narrow-band airborne imagery and the CWSI thermal index. Remote Sens. Environ. 2013, 138, 38–50. [Google Scholar] [CrossRef]
- Llorens, J.; Gil, E.; Llop, J.; Escolà, A. Variable rate dosing in precision viticulture: Use of electronic devices to improve application efficiency. Crop Prot. 2010, 29, 239–248. [Google Scholar] [CrossRef]
- Bramley, R.G.V.; le Moigne, M.; Evain, S.; Ouzman, J.; Florin, L.; Fadaili, E.M. On-the-go sensing of grape berry anthocyanins during commercial harvest: Development and prospects. Aust. J. Grape Wine Res. 2011, 17, 316–326. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture. Remote Sens. 2015, 7, 2971-2990. https://doi.org/10.3390/rs70302971
Matese A, Toscano P, Di Gennaro SF, Genesio L, Vaccari FP, Primicerio J, Belli C, Zaldei A, Bianconi R, Gioli B. Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture. Remote Sensing. 2015; 7(3):2971-2990. https://doi.org/10.3390/rs70302971
Chicago/Turabian StyleMatese, Alessandro, Piero Toscano, Salvatore Filippo Di Gennaro, Lorenzo Genesio, Francesco Primo Vaccari, Jacopo Primicerio, Claudio Belli, Alessandro Zaldei, Roberto Bianconi, and Beniamino Gioli. 2015. "Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture" Remote Sensing 7, no. 3: 2971-2990. https://doi.org/10.3390/rs70302971
APA StyleMatese, A., Toscano, P., Di Gennaro, S. F., Genesio, L., Vaccari, F. P., Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., & Gioli, B. (2015). Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture. Remote Sensing, 7(3), 2971-2990. https://doi.org/10.3390/rs70302971