
A Fusion Method Based on Physical Modes and Satellite Remote Sensing for 3D Ocean State Reconstruction


Abstract
1. Introduction
- (1)
- An enhanced lightweight MEOF framework was developed, integrating multivariate data (satellite sea surface observations, historical reanalysis products, and Argo profile observations) in the sparsely observed in situ South China Sea region to achieve high-temporal-resolution (daily) three-dimensional multivariate fields (containing temperature, salinity, and current).
- (2)
- On the basis of ensuring high computational efficiency, our framework obtained better reconstruction accuracy than the traditional baseline method (MODAS), which can be further generalized to the application of operational ocean forecasting.
2. Materials and Methods
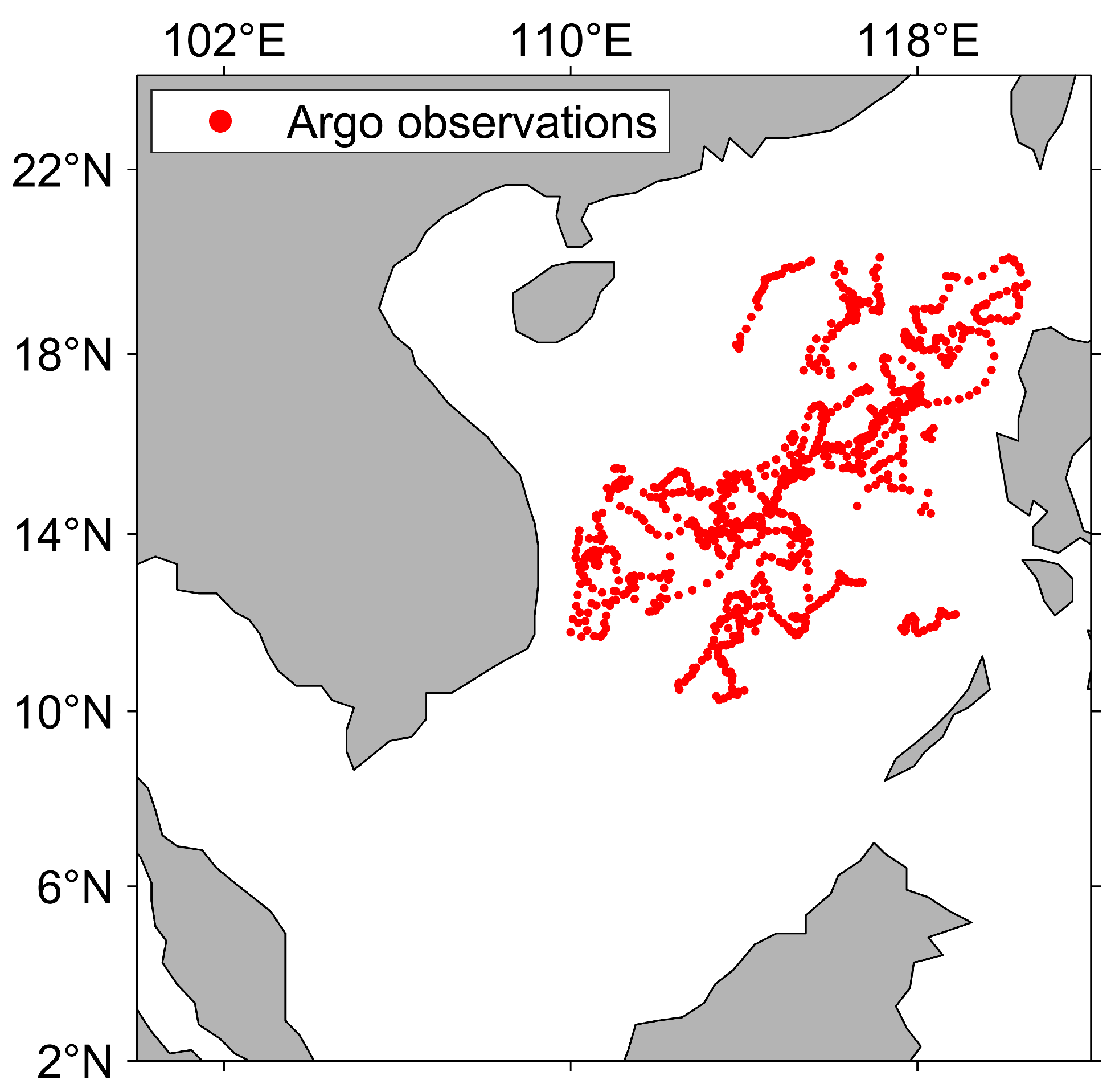
2.1. Study Area
2.2. Data: HYCOM Data
2.3. Data: Satallite Data
2.4. Data: In Situ Vertical Profiles
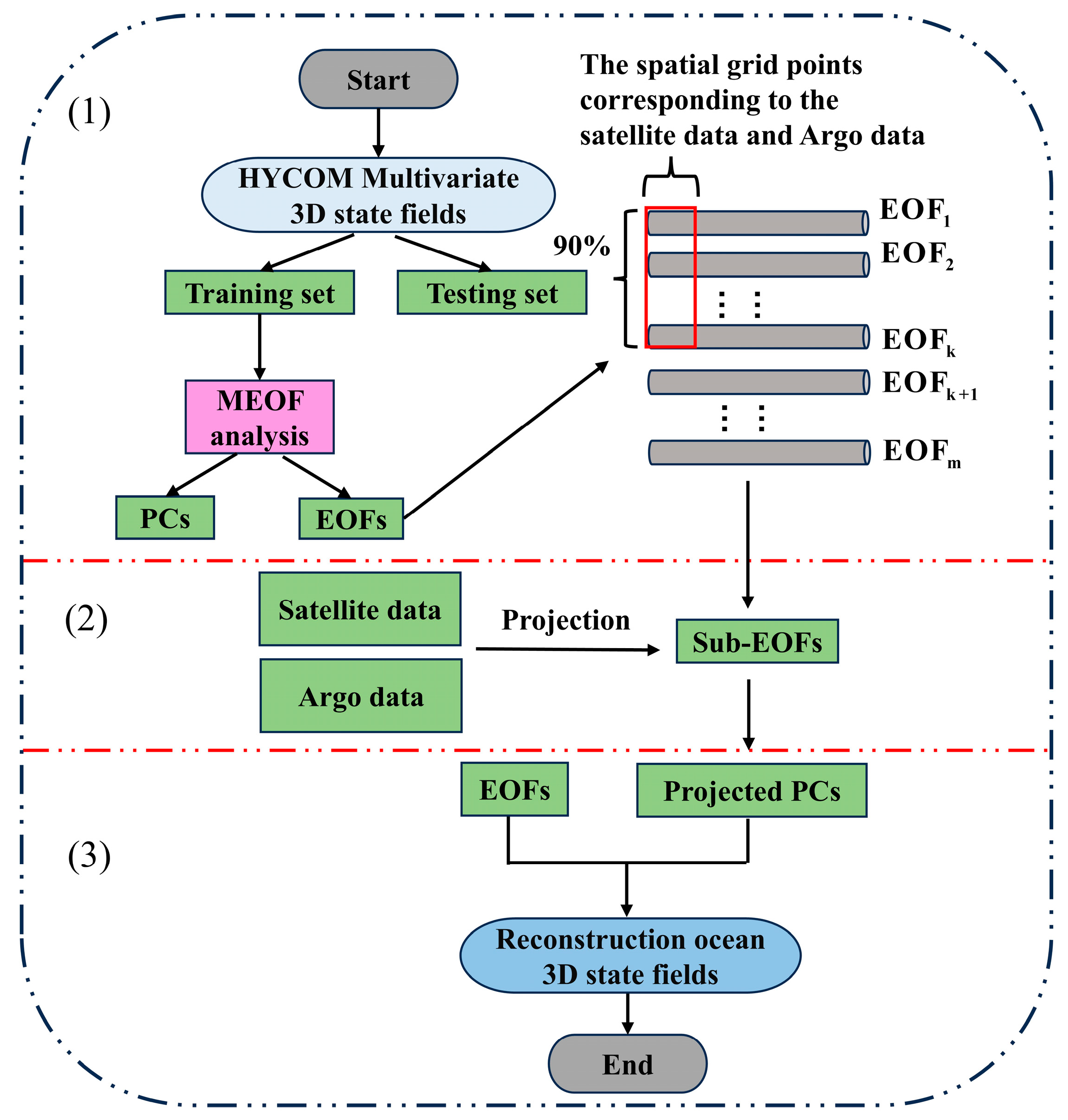
2.5. MEOF Reconstruction Framework
- (1)
- Multivariate joint decomposition: the MEOF method is applied to decompose multivariate ocean fields into EOFs, from which sub-EOFs explaining 90% of the variance and corresponding to satellite and Argo data are selected.
- (2)
- Satellite and Argo data projection: satellite and Argo data are projected onto the selected sub-EOFs to derive the projected PCs.
- (3)
- Reconstruction integration: the complete EOFs are combined with the projected PCs to generate 3D reconstructed ocean fields.
2.6. Design of Experiments
3. Results
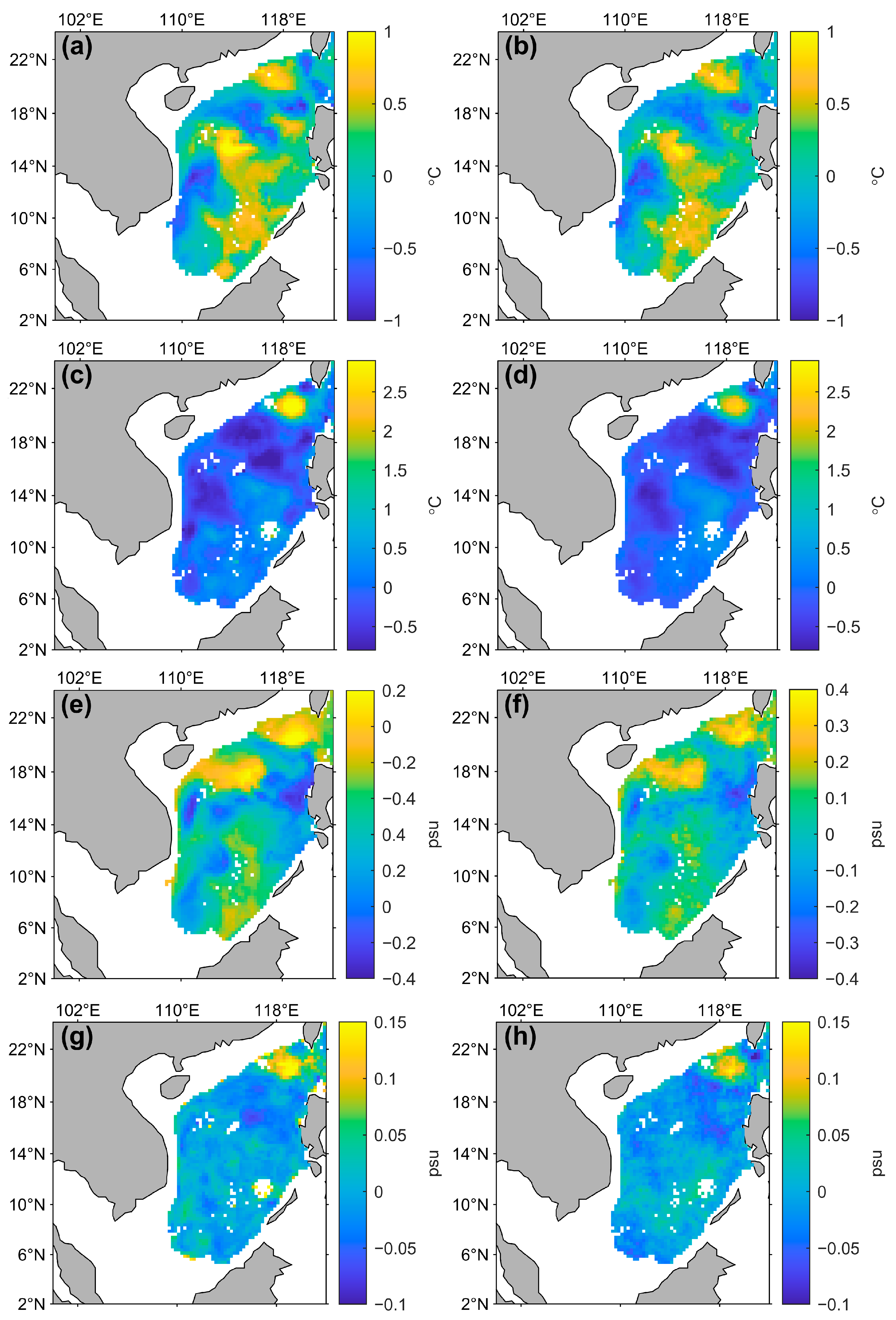
3.1. Testing Experiment
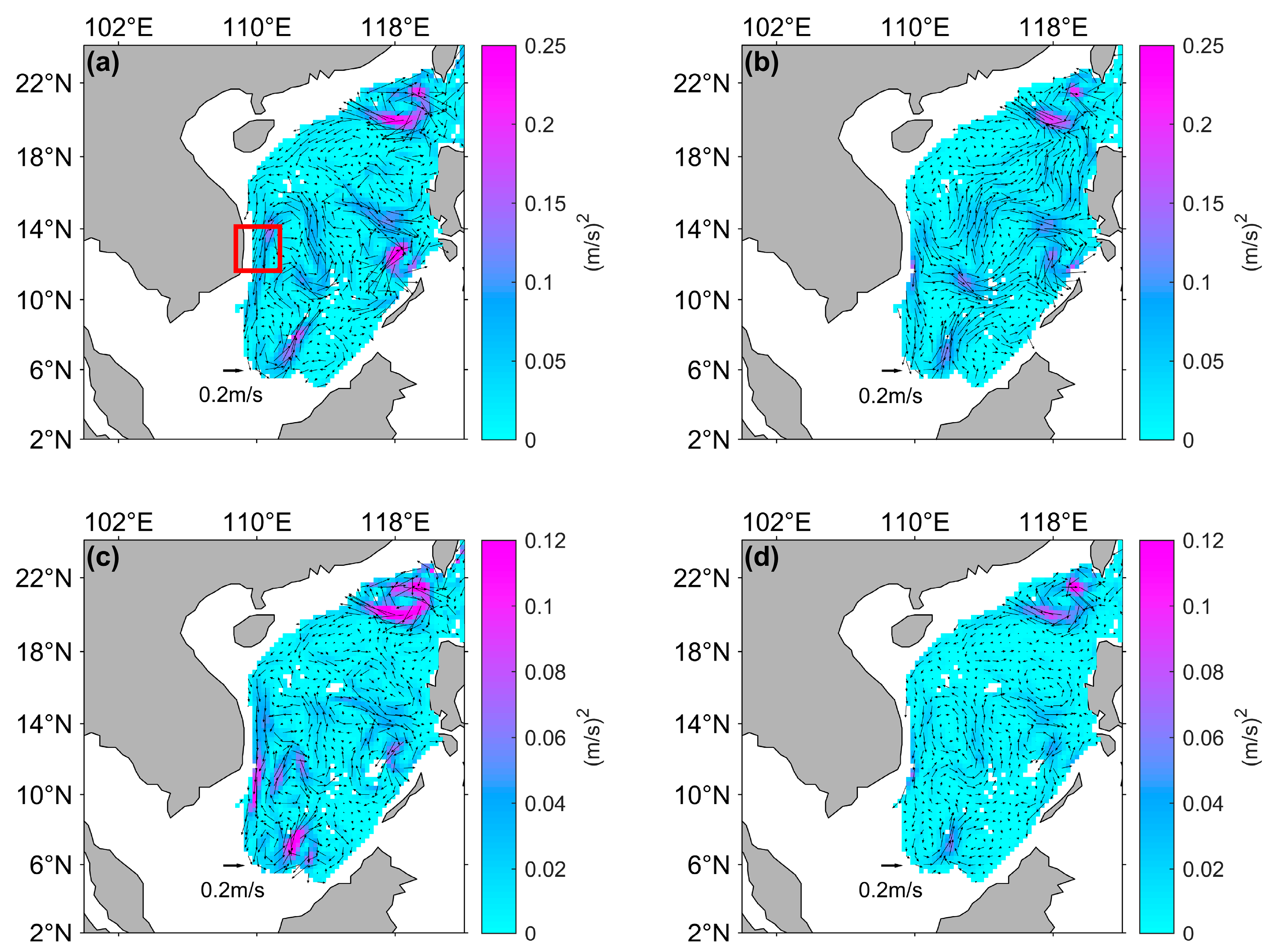
3.2. Practical Experiments
3.2.1. Reconstruction Based on Satellite Observation Dataset
3.2.2. Integration of Argo Observation Profiles in Projections
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, Q.Y.; Sun, L.; Liu, S.S.; Xian, T.; Yan, Y.F. A new mononuclear eddy identification method with simple splitting strategies. Remote Sens. Lett. 2014, 5, 65–72. [Google Scholar] [CrossRef]
- Li, Q.Y.; Sun, L.; Lin, S.F. GEM: A dynamic tracking model for mesoscale eddies in the ocean. Ocean Sci. 2016, 12, 1249–1267. [Google Scholar] [CrossRef]
- Chelton, D.B.; Schlax, M.G.; Samelson, R.M. Global observations of nonlinear mesoscale eddies. Prog. Oceanogr. 2011, 91, 167–216. [Google Scholar] [CrossRef]
- Chen, G.; Gan, J.; Xie, Q.; Chu, X.Q.; Wang, D.X.; Hou, Y.J. Eddy heat and salt transports in the South China Sea and their seasonal modulations. J. Geophys. Res. Oceans 2012, 117, C05021. [Google Scholar] [CrossRef]
- Shao, Q.; Li, W.; Hou, G.C.; Han, G.J.; Wu, X.B. Mid-Term simultaneous spatiotemporal prediction of sea surface height anomaly and sea surface temperature using satellite data in the south China sea. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1–5. [Google Scholar] [CrossRef]
- Shao, Q.; Li, W.; Han, G.J.; Hou, G.C.; Liu, S.Y.; Gong, Y.T.; Qu, P. A deep learning model for forecasting sea surface height anomalies and temperatures in the south China sea. J. Geophys. Res. Oceans 2021, 126, e2021JC017515. [Google Scholar] [CrossRef]
- Hu, S.; Shao, Q.; Li, W.; Han, G.J.; Zheng, Q.Y.; Wang, R.; Liu, H.Y. Multivariate sea surface prediction in the Bohai sea using a data-driven model. J. Mar. Sci. Eng. 2023, 11, 2096. [Google Scholar] [CrossRef]
- Hurlburt, H.E. The potential for ocean prediction and role of altimeter data. Mar. Geod. 1984, 8, 17–66. [Google Scholar] [CrossRef]
- Hurlburt, H.E. Dynamic transfer of simulated altimeter data into subsurface information by a numerical ocean model. J. Geophys. Res. Oceans 1986, 91, 2372–2400. [Google Scholar] [CrossRef]
- Zhu, Y.H.; Cao, G.J.; Wang, Y.G.; Li, S.J.; Xu, T.F.; Wang, D.Q.; Teng, F.; Wei, Z.X. Variability of the deep South China Sea circulation derived from HYCOM reanalysis data. Acta Oceanol. Sin. 2022, 41, 54–64. [Google Scholar] [CrossRef]
- Wang, M.; Liu, Z.J.; Zhu, X.H.; Yan, X.M.; Zhang, Z.Z.; Zhao, R.X. Origin and formation of the Ryukyu Current revealed by HYCOM reanalysis. Acta Oceanol. Sin. 2019, 38, 1–10. [Google Scholar] [CrossRef]
- Chang, Y.C.; Chen, G.Y.; Chu, P.C.; Centurioni, L.R.; Liu, C.C. Wave and current in extratropical versus tropical cyclones. J. Oceanogr. 2023, 79, 537–546. [Google Scholar] [CrossRef]
- Shao, Q.; Hou, G.C.; Li, W.; Han, G.J.; Liang, K.Z.; Bai, Y. Ocean reanalysis data-driven deep learning forecast for sea surface multivariate in the South China Sea. Earth Space Sci. 2021, 8, e2020EA001558. [Google Scholar] [CrossRef]
- Yu, Z.T.; Fan, Y.L.; Metzger, E.J. An empirical method for predicting the South China Sea Warm Current from wind stress using Ekman dynamics. Ocean Model. 2022, 174, 102030. [Google Scholar] [CrossRef]
- Chassignet, E.P.; Hurlburt, H.E.; Smedstad, O.M.; Halliwell, G.R.; Hogan, P.J.; Wallcraft, A.J.; Baraille, R.; Bleck, R. The HYCOM (HYbrid Coordinate Ocean Model) Data Assimilative System. J. Mar. Syst. 2007, 65, 60–83. [Google Scholar] [CrossRef]
- Carrier, M.J.; Ngodock, H.E.; Smith, S.R.; D’Addezio, J.M.; Osborne, J. Impact of Spatially-Dense In-Situ Observations on Ocean Forecasts of Mixed Layer and Thermocline Depth. J. Oper. Oceanogr. 2023, 17, 103–123. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, W.; Wang, H.; Cao, Y. Data Assimilation System for the Finite-Volume Community Ocean Model Based on a Localized Weighted Ensemble Kalman Filter. J. Appl. Remote Sens. 2023, 17, 024508. [Google Scholar] [CrossRef]
- Fox, D.N.; Teague, W.J.; Barron, C.N.; Carnes, M.R.; Lee, C.M. The Modular Ocean Data Assimilation System (MODAS). J. Atmos. Ocean. Technol. 2002, 19, 240–252. [Google Scholar] [CrossRef]
- Buongiorno Nardelli, B.; Guinehut, S.; Pascual, A.; Drillet, Y.; Mulet, S.; Ruiz, S. Towards high resolution mapping of 3-D mesoscale dynamics from observations. Ocean Sci. 2012, 8, 885–901. [Google Scholar] [CrossRef]
- Guinehut, S.; Dhomps, A.L.; Larnicol, G.; Le Traon, P.Y. High resolution 3-D temperature and salinity fields derived from in situ and satellite observations. Ocean Sci. 2012, 8, 845–857. [Google Scholar] [CrossRef]
- Buongiorno Nardelli, B.; Santoleri, R. Reconstructing synthetic profiles from surface data. J. Atmos. Ocean. Technol. 2004, 21, 693–703. [Google Scholar] [CrossRef]
- Carnes, M.R.; Mitchell, J.L.; Dewitt, P.W. Synthetic temperature profiles derived from Geosat altimetry: Comparison with air-dropped expendable bathythermograph profiles. J. Geophys. Res. Oceans 1990, 95, 17979–17992. [Google Scholar] [CrossRef]
- Carnes, M.R.; Teague, W.J.; Mitchell, J.L. Inference of subsurface thermohaline structure from fields measurable by satellite. J. Atmos. Ocean. Technol. 1994, 11, 551–566. [Google Scholar] [CrossRef]
- Wang, H.; Wang, G.; Chen, D.; Zhang, R. Reconstruction of three-dimensional pacific temperature with Argo and satellite observations. Atmos. Ocean. 2012, 50, 116–128. [Google Scholar] [CrossRef]
- Buongiorno Nardelli, B.; Santoleri, R. Methods for the reconstruction of vertical profiles from surface data: Multivariate analyses, residual GEM, and variable temporal signals in the North Pacific Ocean. J. Atmos. Ocean. Technol. 2005, 22, 1762–1781. [Google Scholar] [CrossRef]
- Buongiorno Nardelli, B.; Guinehut, S.; Verbrugge, N.; Cotroneo, Y.; Zambianchi, E.; Iudicone, D. Southern Ocean mixed layer seasonal and interannual variations from combined satellite and in situ data. J. Geophys. Res. Oceans 2017, 122, 10042–10060. [Google Scholar] [CrossRef]
- Zhuang, Z.; Zhang, Y.; Zhang, L.; Ruan, W.; Lyu, D.; Yu, J. Reconstructing the three-dimensional thermohaline structure of mesoscale eddies in the South China Sea using in situ measurements and multi-sensor satellites. Remote Sens. 2025, 17, 22. [Google Scholar] [CrossRef]
- Yu, F.J.; Wang, Z.Y.; Liu, S.; Chen, G. Inversion of the three-dimensional temperature structure of mesoscale eddies in the Northwest Pacific based on deep learning. Acta Oceanol. Sin. 2021, 40, 176–186. [Google Scholar] [CrossRef]
- Su, H.; Wang, A.; Zhang, T.Y.; Qin, T.; Du, X.P.; Yan, X.H. Super-resolution of subsurface temperature field from remote sensing observations based on machine learning. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102440. [Google Scholar] [CrossRef]
- Su, H.; Zhang, T.Y.; Lin, M.J.; Lu, W.F.; Yan, X.H. Predicting subsurface thermohaline structure from remote sensing data based on long short-term memory neural networks. Remote Sens. Environ. 2021, 260, 112465. [Google Scholar] [CrossRef]
- Su, H.; Jiang, J.W.; Wang, A.; Zhuang, W.; Yan, X.H. Subsurface temperature reconstruction for the global ocean from 1993 to 2020 using satellite observations and deep learning. Remote Sens. 2022, 14, 3198. [Google Scholar] [CrossRef]
- Smith, P.A.H.; Sørensen, K.A.; Buongiorno Nardelli, B.; Chauhan, A.; Christensen, A.; St. John, M.; Rodrigues, F.; Mariani, P. Reconstruction of Subsurface Ocean State Variables Using Convolutional Neural Networks with Combined Satellite and In Situ Data. Front. Mar. Sci. 2023, 10, 1218514. [Google Scholar] [CrossRef]
- Xie, H.; Xu, Q.; Cheng, Y.; Yin, X.; Fan, K. Reconstructing Three-Dimensional Salinity Field of the South China Sea from Satellite Observations. Front. Mar. Sci. 2023, 10, 1168486. [Google Scholar] [CrossRef]
- Lorenz, E.N. Empirical orthogonal functions and statistical weather prediction. In Statistical Forecasting Project Report; Department of Meteorology, Massachusetts Institute of Technology: Cambridge, MA, USA, 1956; Volume 1, pp. 1–49. [Google Scholar] [CrossRef]
- Guinehut, S.; Le Traon, P.Y.; Larnicol, G.; Philipps, S. Combining Argo and remote-sensing data to estimate the ocean three-dimensional temperature fields-a first approach based on simulated observations. J. Mar. Syst. 2004, 46, 85–98. [Google Scholar] [CrossRef]
- Boutin, J.; Chao, Y.; Asher, W.E.; Delcroix, T.; Drucker, R.; Drushka, K.; Kolodziejczyk, N.; Lee, T.; Reul, N.; Reverdin, G.; et al. Satellite and In Situ Salinity: Understanding Near-Surface Stratification and Subfootprint Variability. Bull. Am. Meteorol. Soc. 2016, 97, 1391–1407. [Google Scholar] [CrossRef]
- Tang, W.Q.; Yueh, S.H.; Fore, A.G.; Hayashi, A. Validation of Aquarius sea surface salinity with in situ measurements from Argo floats and moored buoys. J. Geophys. Res. Oceans 2014, 119, 6171–6189. [Google Scholar] [CrossRef]
- Chu, X.; Chen, G.; Qi, Y. Periodic Mesoscale Eddies in the South China Sea. J. Geophys. Res. Oceans 2020, 125, e2019JC015139. [Google Scholar] [CrossRef]
- Locarnini, R.A.; Mishonov, A.V.; Antonov, J.I.; Boyer, T.P.; Garcia, H.E.; Baranova, O.K.; Baranova, M.M.; Zweng, C.R.; Paver, J.R.; Reagan, D.R.; et al. World Ocean Atlas 2013, Volume 1: Temperature; Levitus, S., Mishonov, A., Eds.; NOAA Atlas NESDIS 73; National Oceanic and Atmospheric Administration: Washington, DC, USA, 2013; p. 40.
- Belson, B.A.; Tu, J.H.; Rowley, C.W. Algorithm 945: Modred—A parallelized model reduction library. ACM Trans. Math. Softw. 2014, 40, 1–23. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Spatial Modes | Projection Matrix | Validation Data |
|---|---|---|---|
| Exp. 1 1 | HYCOM data for 2017, including T, S, u, and v | ||
| Exp. 2 | ] | ] | |
| Exp. 3 | ] | ] | |
| Exp. 4 | The optimal scheme | : satellite data | Argo data for 2017, including T and S |
| Exp. 5 | The optimal scheme | : satellite data and Argo data |
| Elements | Spatial Modes | Projection Matrix |
|---|---|---|
| T | [, ] | [SSH, SST] |
| S | [, , ] | [SSH, SST, SSS] |
| u and v | SSH |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, Y.; Wang, X.; Wang, B.; Li, W.; Han, G. A Fusion Method Based on Physical Modes and Satellite Remote Sensing for 3D Ocean State Reconstruction. Remote Sens. 2025, 17, 1468. https://doi.org/10.3390/rs17081468
Hong Y, Wang X, Wang B, Li W, Han G. A Fusion Method Based on Physical Modes and Satellite Remote Sensing for 3D Ocean State Reconstruction. Remote Sensing. 2025; 17(8):1468. https://doi.org/10.3390/rs17081468
Chicago/Turabian StyleHong, Yingxiang, Xuan Wang, Bin Wang, Wei Li, and Guijun Han. 2025. "A Fusion Method Based on Physical Modes and Satellite Remote Sensing for 3D Ocean State Reconstruction" Remote Sensing 17, no. 8: 1468. https://doi.org/10.3390/rs17081468
APA StyleHong, Y., Wang, X., Wang, B., Li, W., & Han, G. (2025). A Fusion Method Based on Physical Modes and Satellite Remote Sensing for 3D Ocean State Reconstruction. Remote Sensing, 17(8), 1468. https://doi.org/10.3390/rs17081468