
Comparison of UAV-Based LiDAR and Photogrammetric Point Cloud for Individual Tree Species Classification of Urban Areas

 , ,
, , 
Abstract
1. Introduction
2. Study Area and Data Source
2.1. Study Area
2.2. Data Source
2.2.1. UAV LiDAR Data
2.2.2. UAV-Based Photogrammetry Data
2.2.3. UAV Hyperspectral Data
2.2.4. Field Data
2.2.5. The Point Cloud Characteristic of UAV-DAP and UAV-Based LiDAR Data
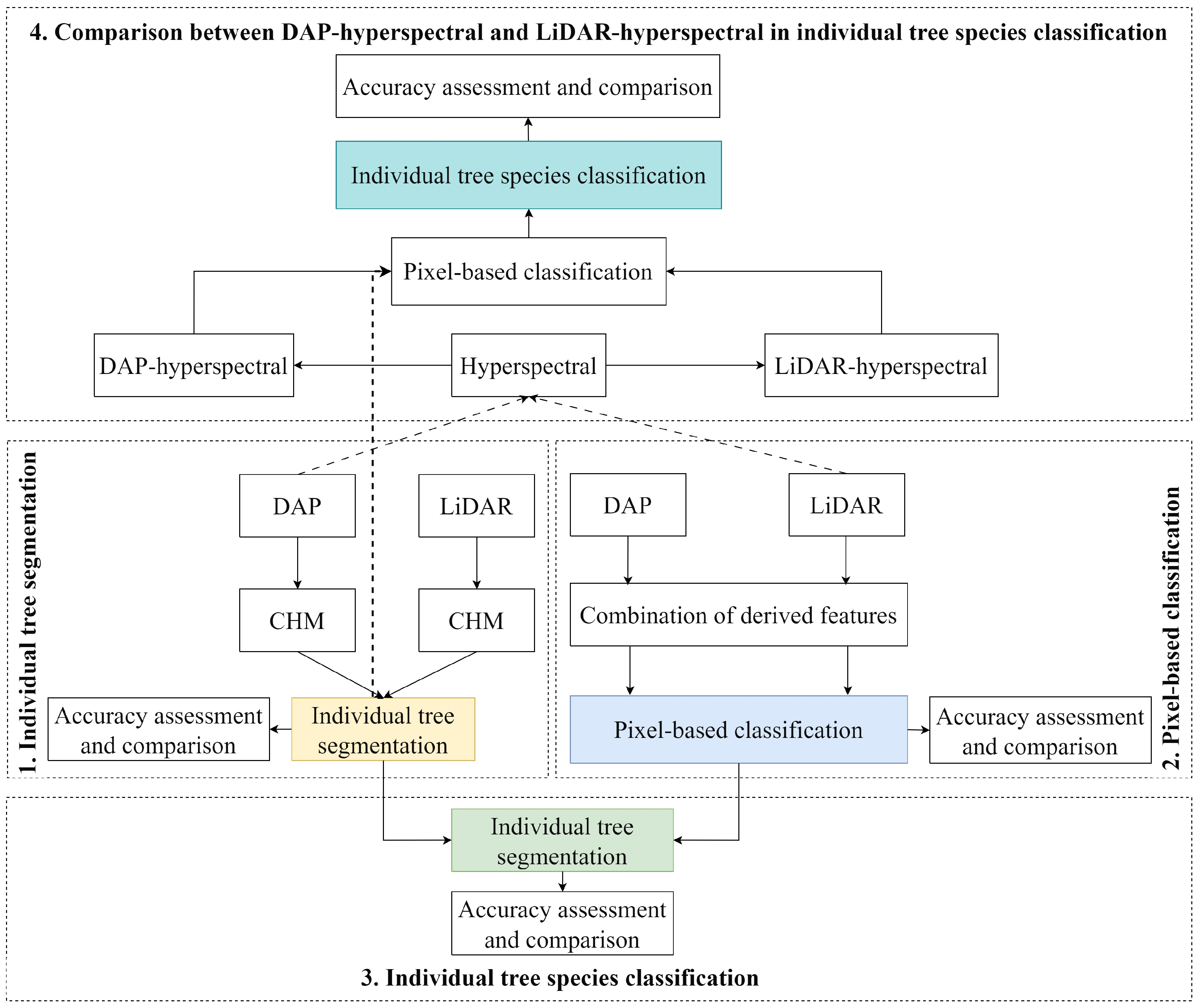
3. Methodology
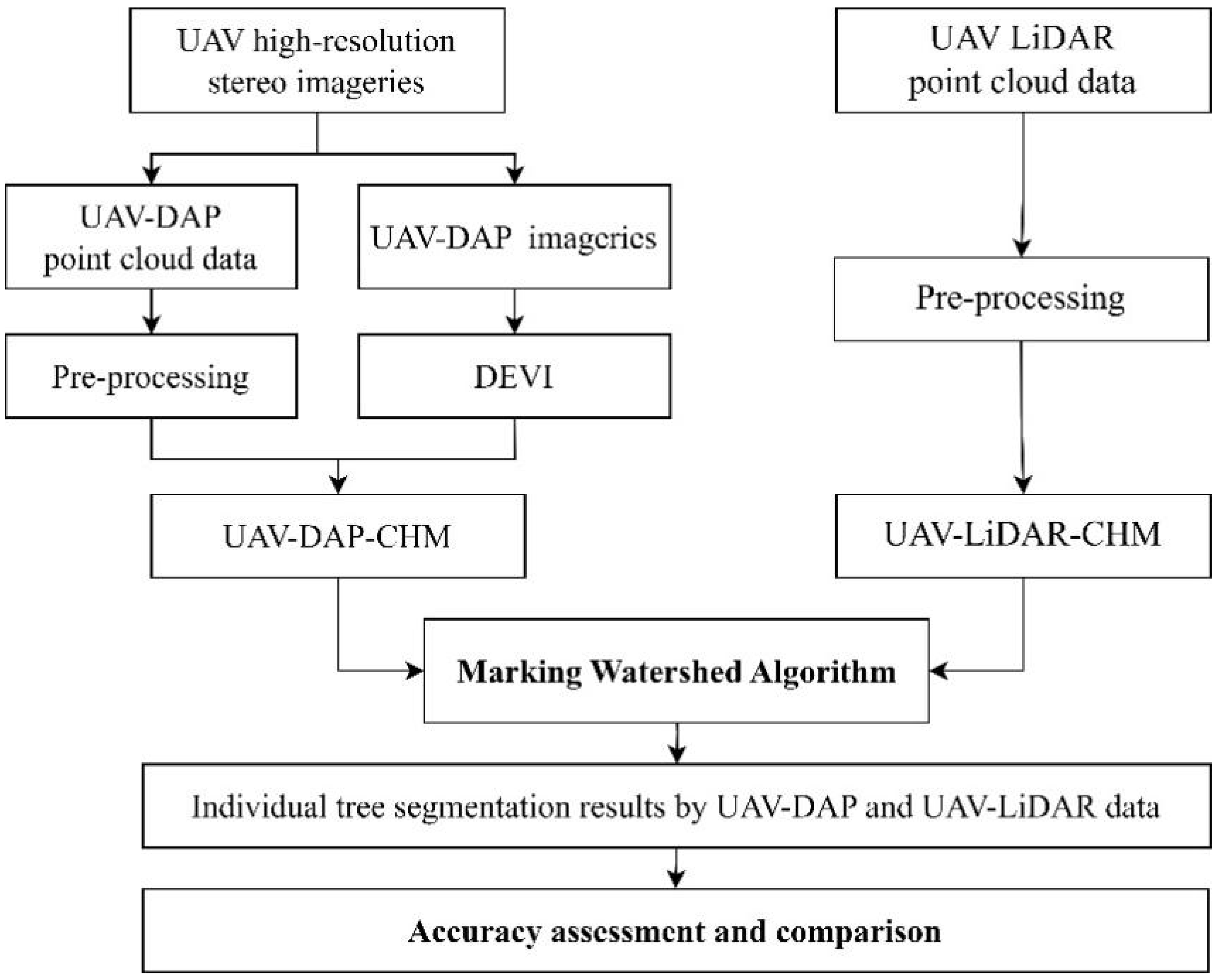
3.1. Two-Dimensional Boundary of Urban Trees Extraction
3.2. Individual Tree Segmentation and Accuracy Assessment
3.3. Random Forest Classification Method
3.4. Individual Tree Species Classification
3.5. Accuracy Assessment
4. Results
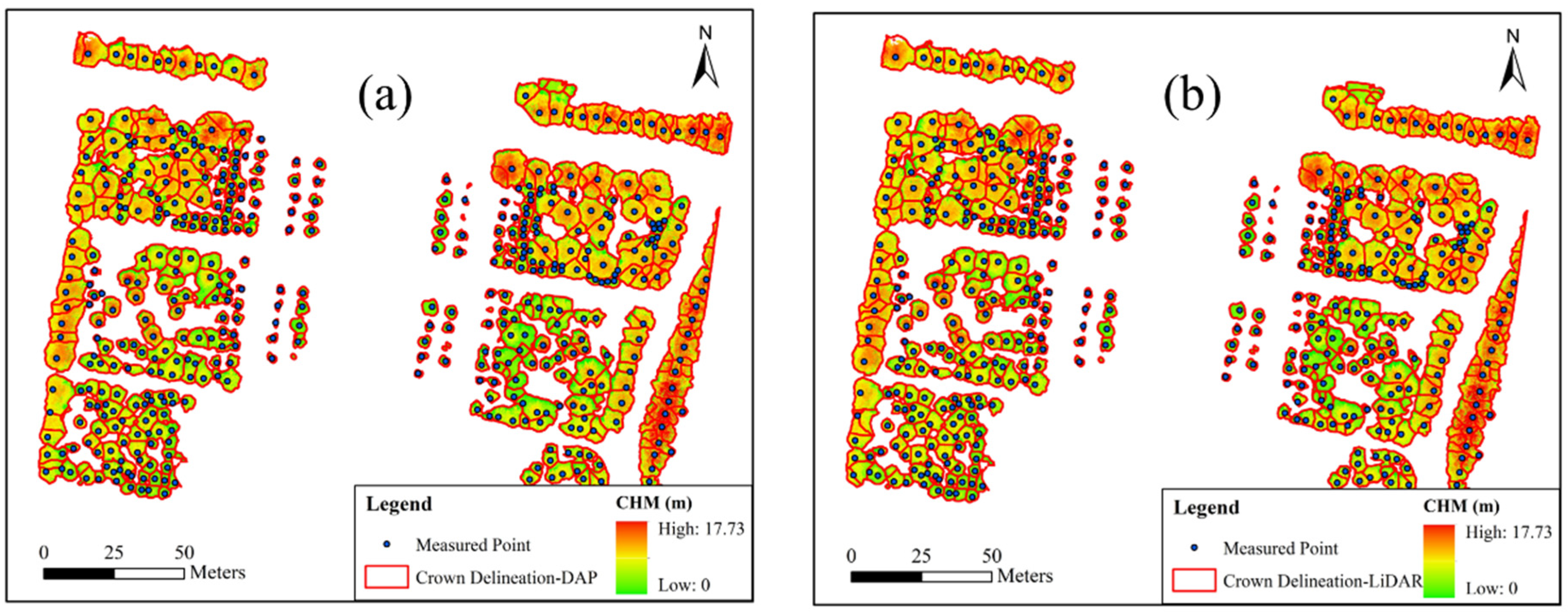
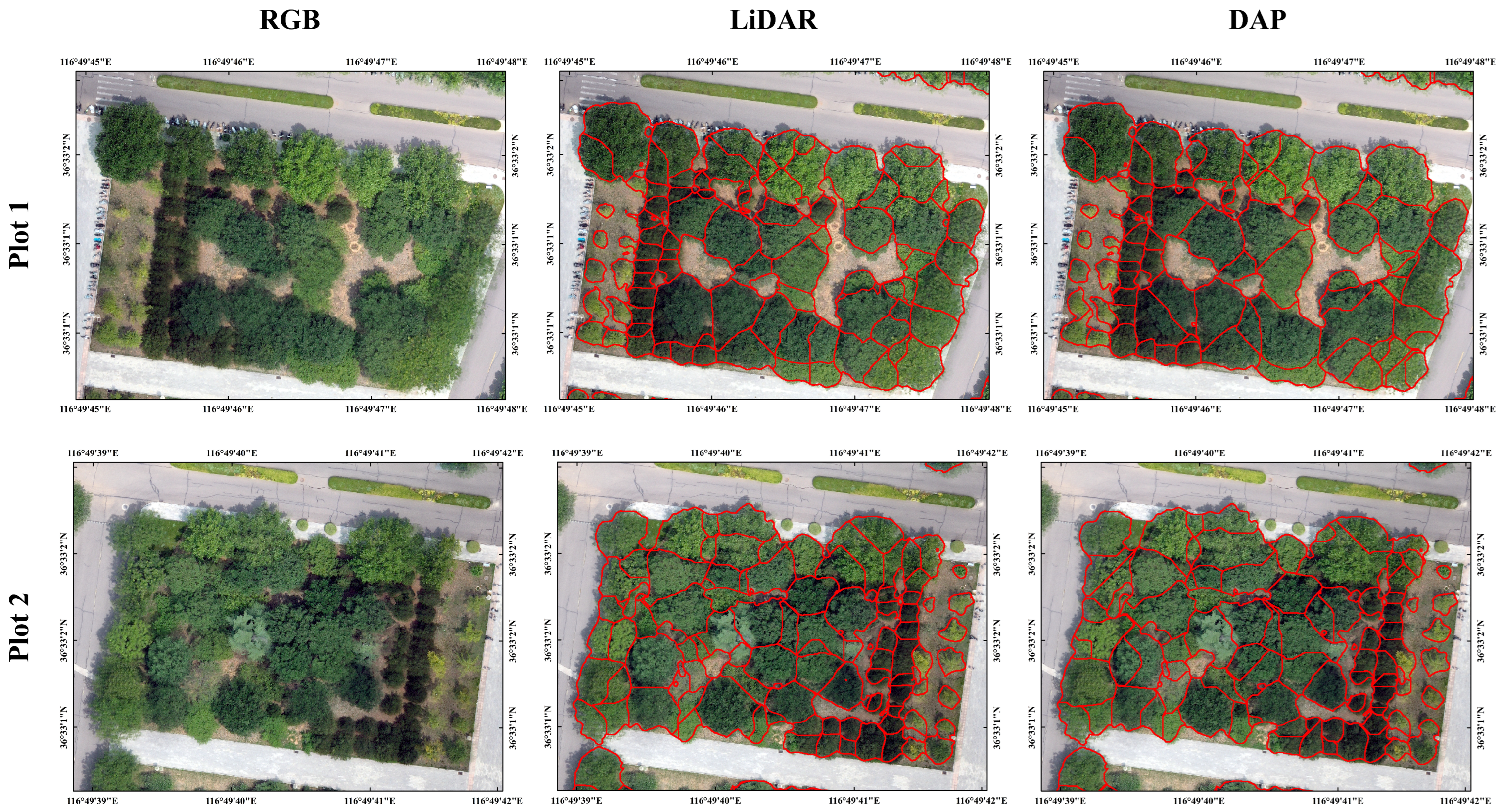
4.1. Accuracy Assessment of UAV-DAP-Based and UAV-Based LiDAR-Based Individual Tree Segmentation
4.2. Accuracy Assessment of Urban Tree Species Classification in Different Conditions
4.2.1. Feature Importance
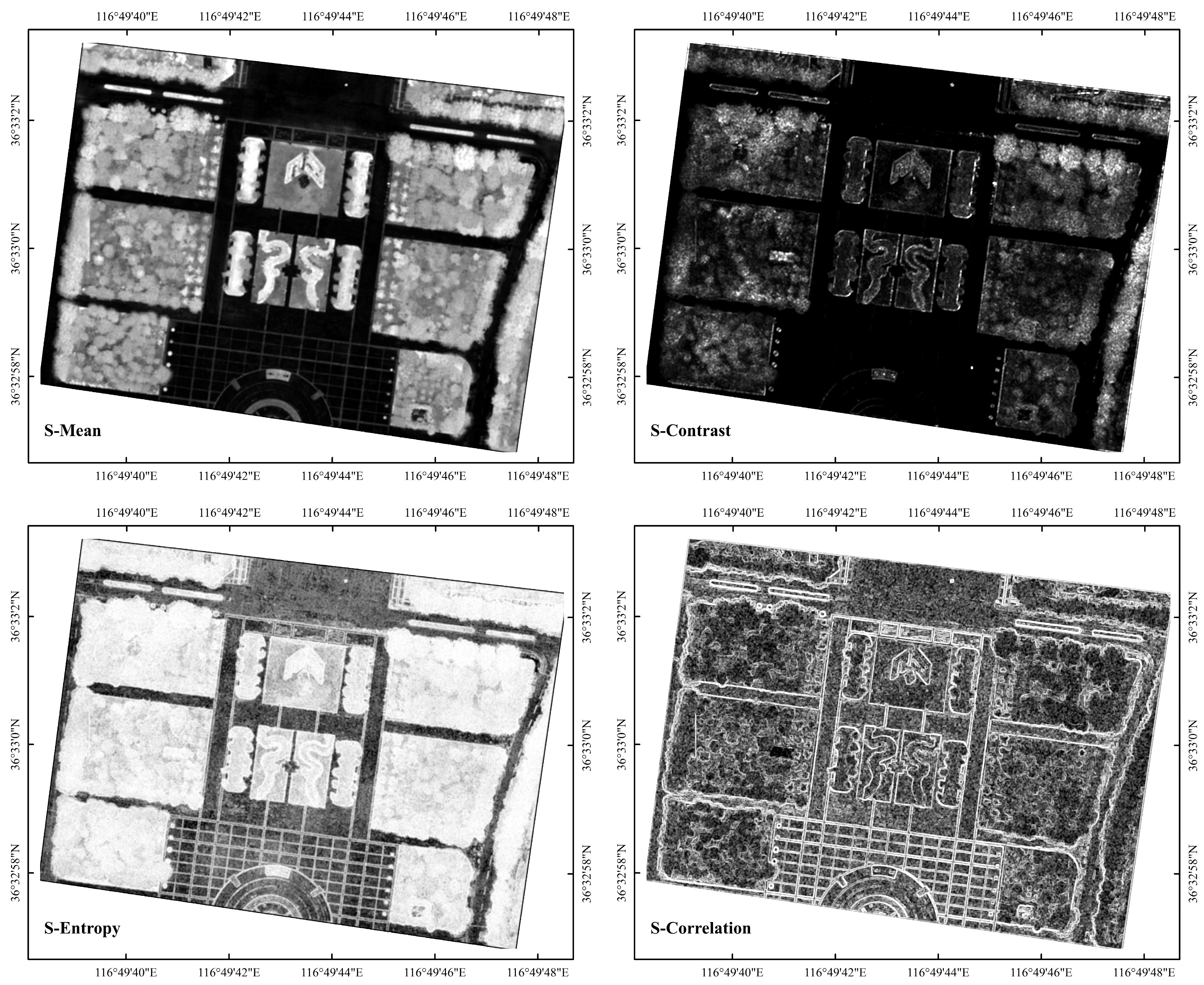
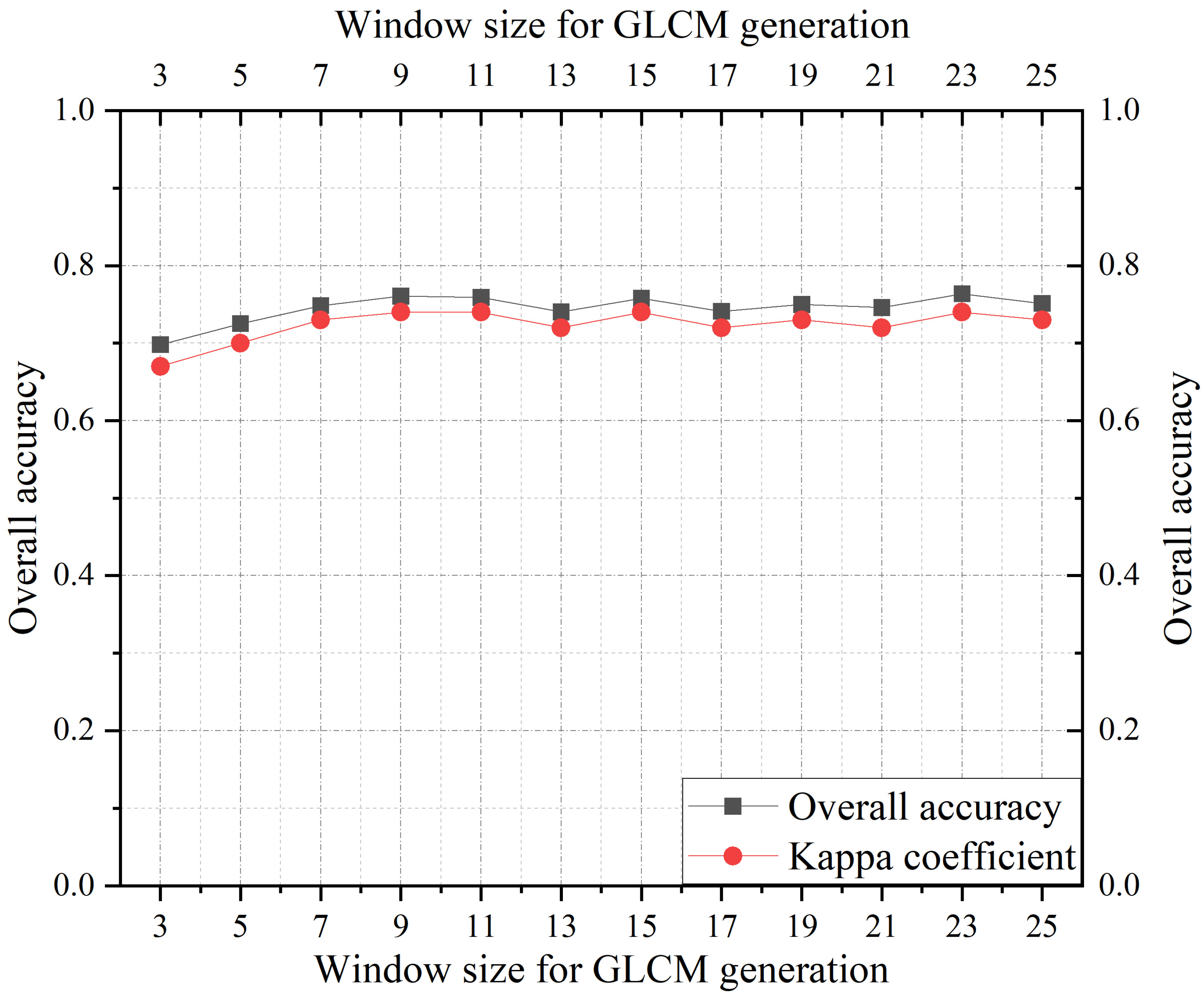
4.2.2. Effects of Texture Extraction Window Size
4.2.3. Effects of LiDAR Feature Cell Size
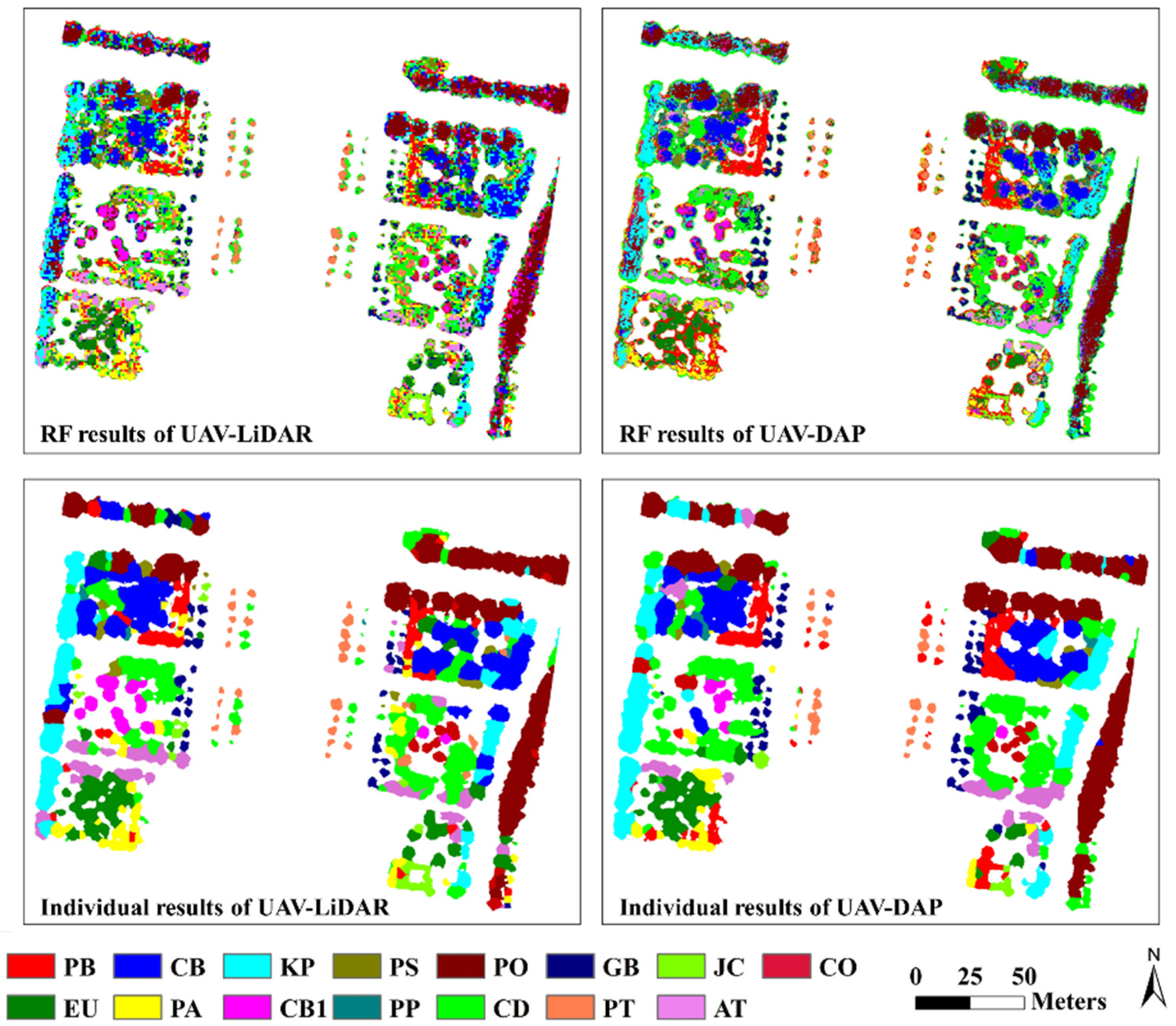
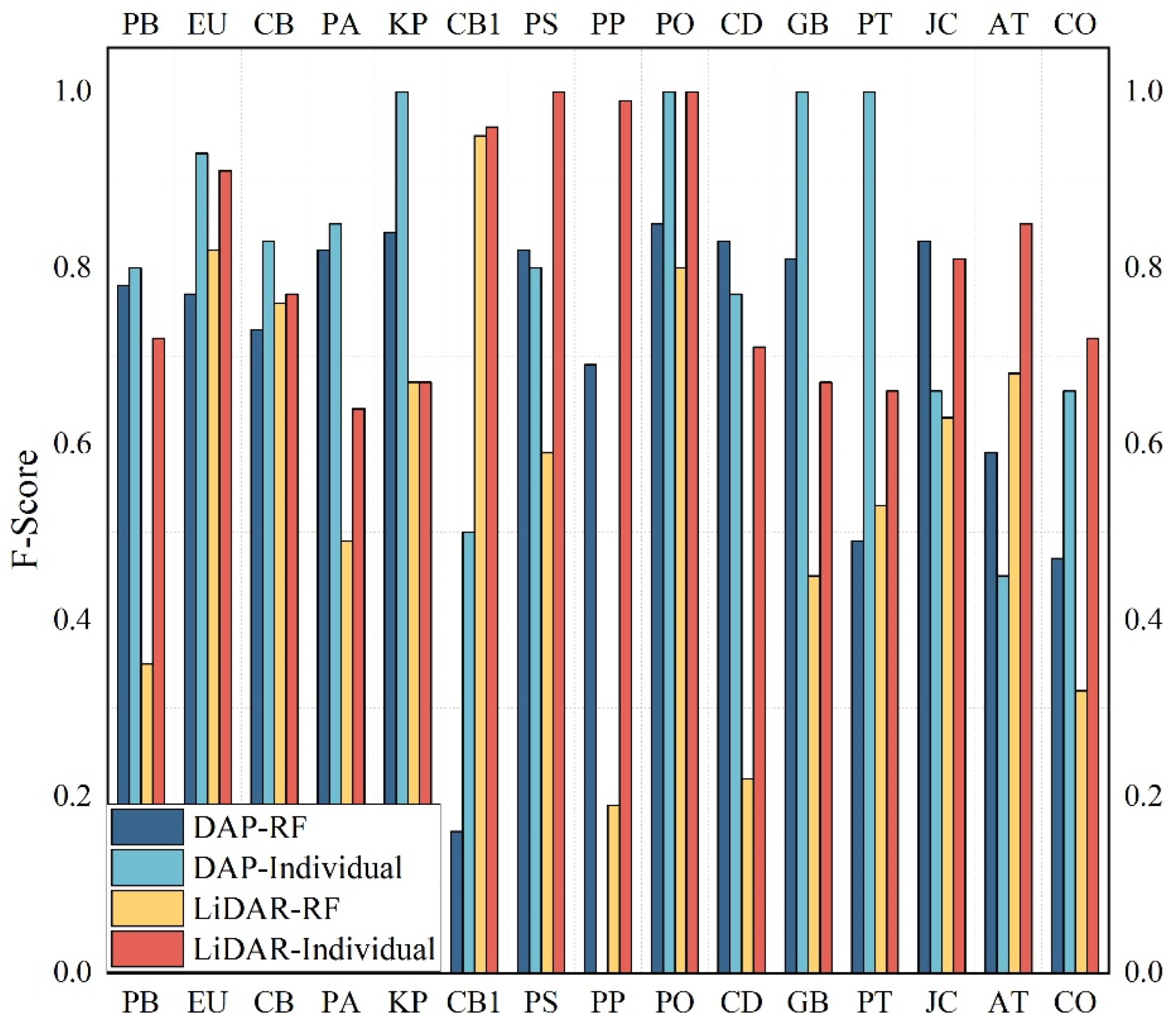
4.2.4. Accuracy Assessment of Individual Tree Species Classification
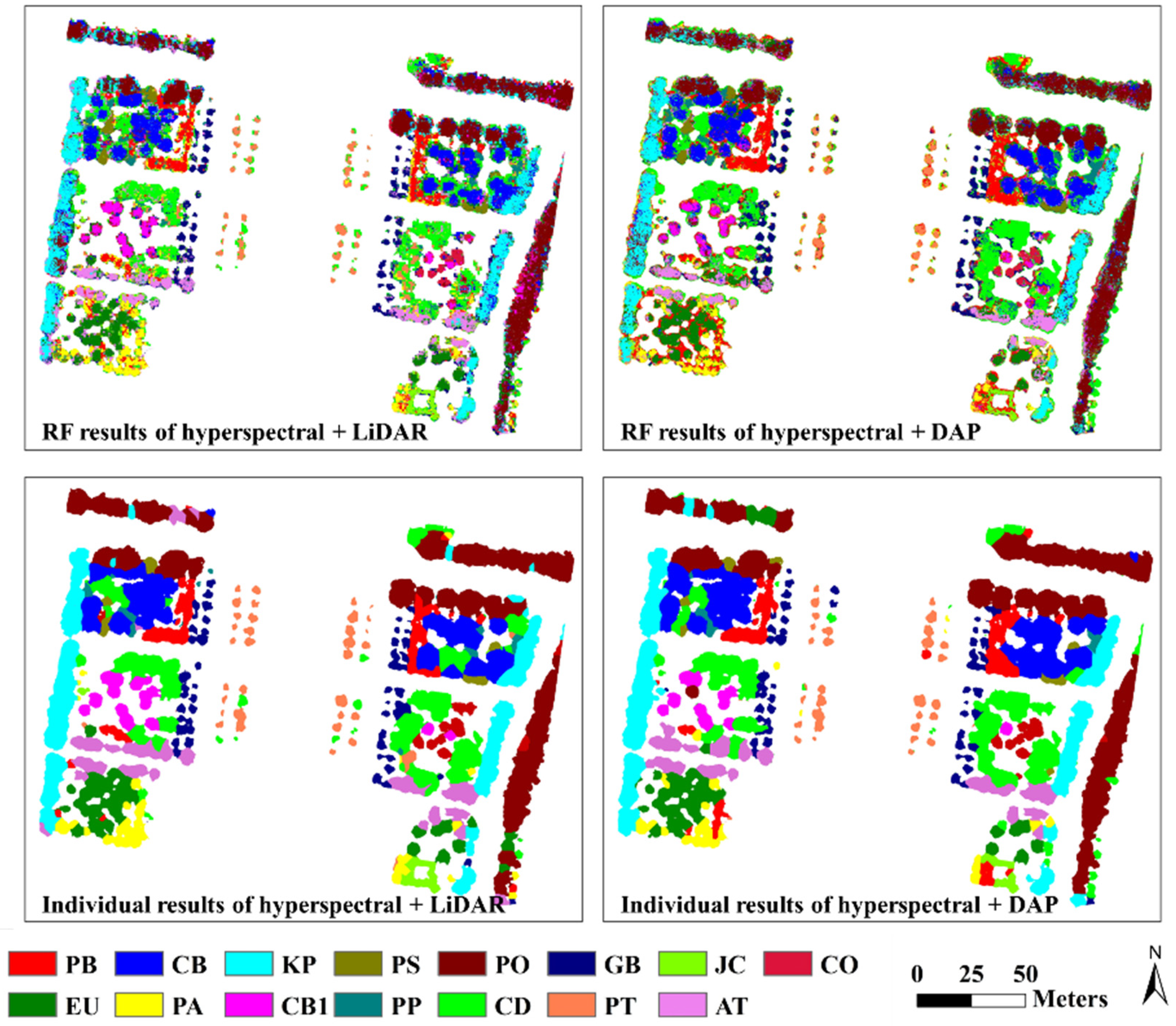
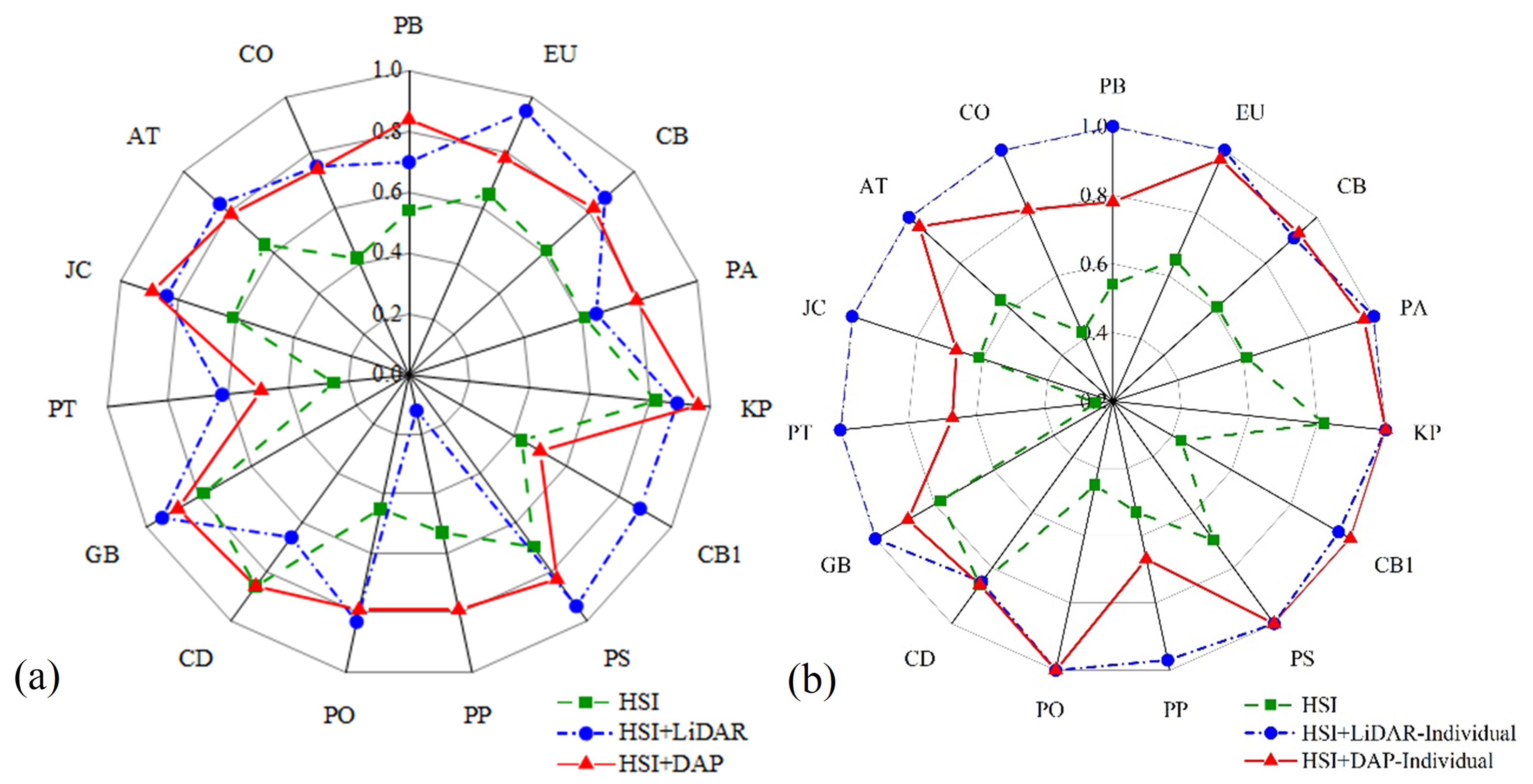
4.3. Improvement of UAV-DAP and UAV-Based LiDAR Data in Individual Tree Species Classification Fused with Hyperspectral Data
5. Discussion
5.1. Performance Comparison Between UAV-DAP and UAV-Based LiDAR Data in Individual Tree Segmentation
5.2. Performance Comparison Between UAV-DAP and UAV-Based LiDAR in Individual Tree Species Classification
5.3. The Improvement of UAV-DAP and UAV-Based LiDAR Data in Individual Tree Species Classification Fused with UAV Hyperspectral Data
5.4. Limitations and Future Work
6. Conclusions
- (1)
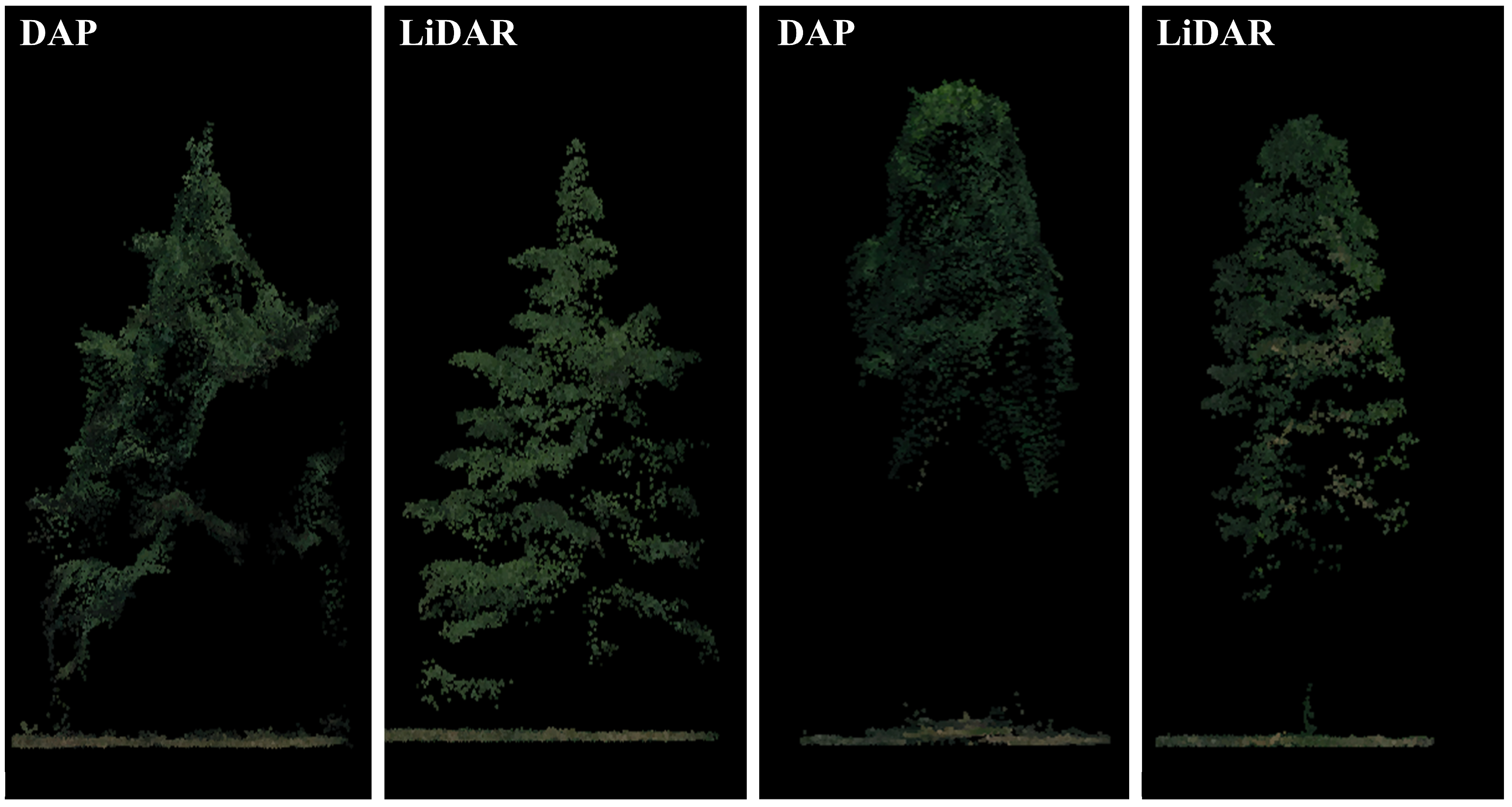
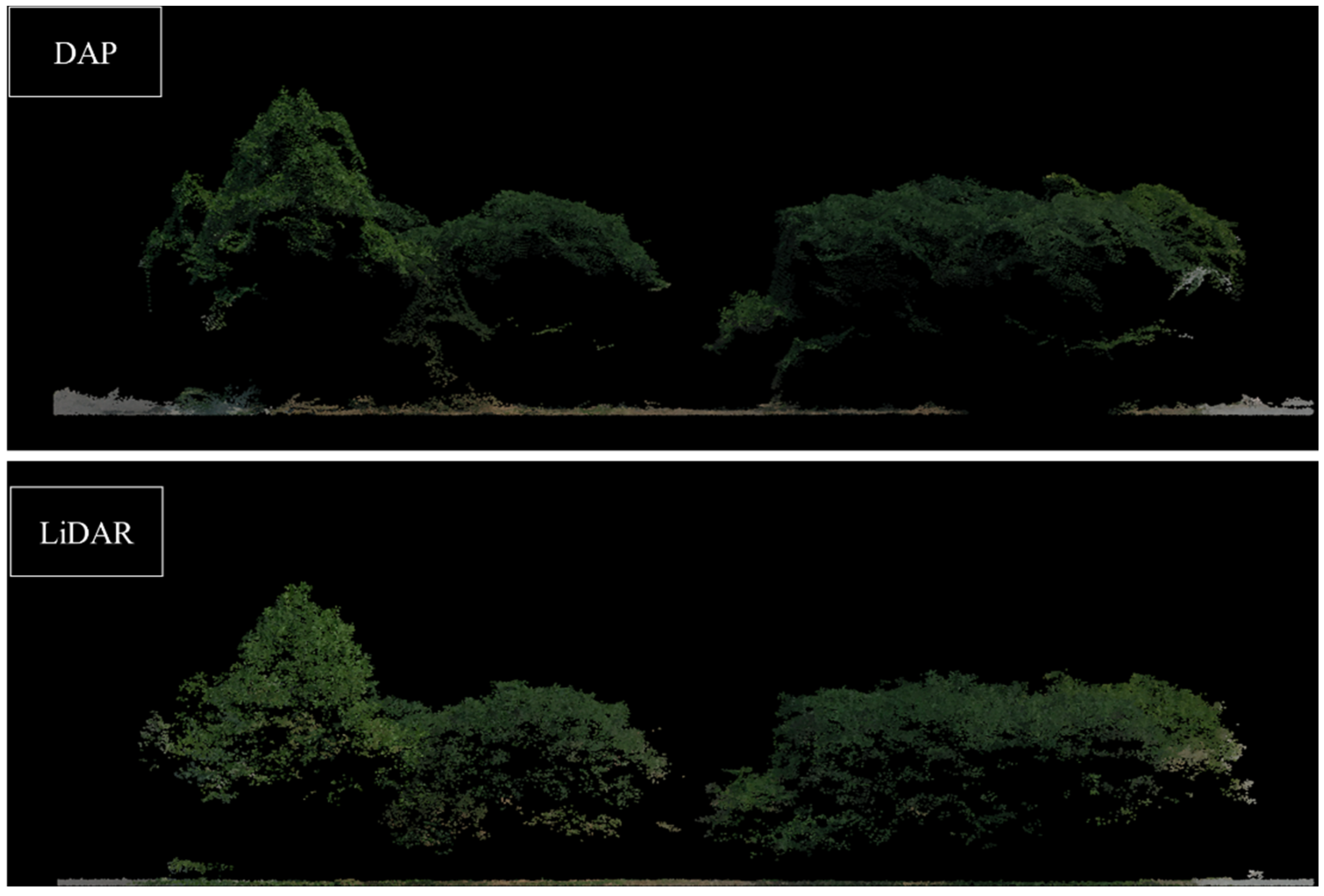
- Structural Superiority of UAV-based LiDAR: UAV-based LiDAR data outperformed UAV-based photogrammetry in individual tree segmentation (F-score 0.83 vs. 0.79) due to its ability to penetrate dense canopies and reconstruct understory morphology (e.g., low trees growing adjacent to taller trees). This demonstrates LiDAR’s unique advantage in capturing three-dimensional architectural details within complex urban forest environments.
- (2)
- Spectral-Textural Advantage of UAV-based Photogrammetry: The overall accuracy of DAP in pixel-level tree species classification is 16.5% higher than that of LiDAR by integrating RGB-derived spectral indices (e.g., DEVI) and optimized texture features (9×9 GLCM window). This highlights its cost-effectiveness for spectral-driven tasks in urban forest inventory.
- (3)
- Multi-Sensor Fusion Breakthrough: Hyperspectral-LiDAR fusion achieved superior individual tree classification accuracy (95.98%) compared to hyperspectral DAP (90.53%), demonstrating the synergistic value of combining LiDAR’s structural precision with hyperspectral richness. This approach is particularly effective for species with subtle spectral variations but distinct three-dimensional morphology.
- (4)
- Suggestions: LiDAR should prioritize applications requiring vertical structural fidelity (e.g., carbon stock estimation), while DAP suits large-scale spectral-textural mapping tasks (e.g., biodiversity surveys). DAP should also be adopted as a cost-effective alternative in budget-constrained programs, balancing its high precision with operational affordability. As for budget-constrained urban forestry programs, UAV-DAP can be a cost-effective alternative by balancing its high precision with operational affordability.
- (5)
- Future Directions: Expanded validation finds should be conducted in urban areas with higher species diversity and complex understory conditions to assess the generality of these conclusions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Piiroinen, R.; Fassnacht, F.E.; Heiskanen, J.; Maeda, E.; Mack, B.; Pellikka, P. Invasive tree species detection in the eastern arc mountains biodiversity hotspot using one class classification. Remote Sens. Environ. 2018, 218, 119–131. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Stereńczak, K.; Modzelewska, A.; Lefsky, M.; Waser, L.T.; Straub, C.; Ghosh, A. Review of studies on tree species classification from remotely sensed data. Remote Sens. Environ. 2016, 186, 64–87. [Google Scholar] [CrossRef]
- Axelsson, A.; Lindberg, E.; Olsson, H. Exploring multispectral ALS data for tree species classification. Remote Sens. 2018, 10, 183. [Google Scholar] [CrossRef]
- Gini, R.; Sona, G.; Ronchetti, G.; Passoni, D.; Pinto, L. Improving tree species classification using UAS multispectral images and texture measures. ISPRS Int. J. Geo-Inf. 2018, 7, 315. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating tree detection and segmentation routines on very high resolution UAV LiDAR data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; Cosenza, D.N.; Rodriguez, L.C.E.; Silva, M.; Tomé, M.; Díaz-Varela, R.A.; González-Ferreiro, E. Comparison of ALS- and UAV(SfM)-derived high-density point clouds for individual tree detection in Eucalyptus plantations. Int. J. Remote Sens. 2018, 39, 5211–5235. [Google Scholar] [CrossRef]
- Chen, Q.; Gao, T.; Zhu, J.; Wu, F.; Li, X.; Lu, D.; Yu, F. Individual tree segmentation and tree height estimation using leaf-off and leaf-on UAV-LiDAR data in dense deciduous forests. Remote Sens. 2022, 14, 2787. [Google Scholar] [CrossRef]
- Simonson, W.D.; Allen, H.D.; Coomes, D.A. Use of an airborne Lidar system to model plant species composition and diversity of mediterranean oak forests. Conserv. Biol. 2012, 26, 840–850. [Google Scholar] [CrossRef]
- Vaglio Laurin, G.; Puletti, N.; Chen, Q.; Corona, P.; Papale, D.; Valentini, R. Above ground biomass and tree species richness estimation with airborne lidar in tropical Ghana forests. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 371–379. [Google Scholar] [CrossRef]
- Mao, L.; Dennett, J.; Bater, C.W.; Tompalski, P.; Coops, N.C.; Farr, D.; Kohler, M.; White, B.; Stadt, J.J.; Nielsen, S.E. Using airborne laser scanning to predict plant species richness and assess conservation threats in the oil sands region of Alberta’s boreal forest. For. Ecol. Manag. 2018, 409, 29–37. [Google Scholar] [CrossRef]
- Korpela, I.; Ørka, H.; Maltamo, M.; Tokola, T.; Hyyppä, J. Tree species classification using airborne LiDAR—Effects of stand and tree parameters, downsizing of training set, intensity normalization, and sensor type. Silva Fenn. 2010, 44, 319–339. [Google Scholar]
- Hovi, A.; Korhonen, L.; Vauhkonen, J.; Korpela, I. LiDAR waveform features for tree species classification and their sensitivity to tree- and acquisition related parameters. Remote Sens. Environ. 2016, 173, 224–237. [Google Scholar]
- Holmgren, J.; Persson, Å.; Soderman, U. Species identification of individual trees by combining high resolution LiDAR data with multi-spectral images. Int. J. Remote Sens. 2008, 29, 1537–1552. [Google Scholar]
- Heinzel, J.; Koch, B. Investigating multiple data sources for tree species classification in temperate forest and use for single tree delineation. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 101–110. [Google Scholar]
- Cho, M.A.; Mathieu, R.; Asner, G.P.; Naidoo, L.; van Aardt, J.; Ramoelo, A.; Debba, P.; Wessels, K.; Main, R.; Smit, I.P.J.; et al. Mapping tree species composition in South African savannas using an integrated airborne spectral and LiDAR system. Remote Sens. Environ. 2012, 125, 214–226. [Google Scholar]
- Sedliak, M.; Sačkov, I.; Kulla, L. Classification of tree species composition using a combination of multispectral imagery and airborne laser scanning data. Cent. Eur. For. J. 2017, 63, 1–9. [Google Scholar]
- Wang, B.; Liu, J.; Li, J.; Li, M. UAV LiDAR and hyperspectral data synergy for tree species classification in the maoershan forest farm region. Remote Sens. 2023, 15, 1000. [Google Scholar] [CrossRef]
- Isibue, E.W.; Pingel, T.J. Unmanned aerial vehicle based measurement of urban forests. Urban For. Urban Green. 2020, 48, 126574. [Google Scholar]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.; et al. Individual tree detection and classification with UAV-Based photogrammetric point clouds and hyperspectral imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef]
- Fawcett, D.; Azlan, B.; Hill, T.C.; Kho, L.K.; Bennie, J.; Anderson, K. Unmanned aerial vehicle (UAV) derived structure-from-motion photogrammetry point clouds for oil palm (Elaeis guineensis) canopy segmentation and height estimation. Int. J. Remote Sens. 2019, 40, 7538–7560. [Google Scholar]
- Nuijten, R.J.G.; Coops, N.C.; Goodbody, T.R.H.; Pelletier, G. Examining the multi-seasonal consistency of individual tree segmentation on deciduous stands using digital aerial photogrammetry (DAP) and unmanned aerial systems (UAS). Remote Sens. 2019, 11, 739. [Google Scholar] [CrossRef]
- Karpina, M.; Jarząbek-Rychard, M.; Tymków, P.; Borkowski, A. UAV-Based automatic tree growth measurement for biomass estimation. ISPRS Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2016, 41, 685–688. [Google Scholar]
- Xu, Z.; Shen, X.; Cao, L.; Coops, N.C.; Goodbody, T.R.H.; Zhong, T.; Zhao, W.; Sun, Q.; Ba, S.; Zhang, Z.; et al. Tree species classification using UAS-based digital aerial photogrammetry point clouds and multispectral imageries in subtropical natural forests. Int. J. Appl. Earth Obs. Geoinf. 2020, 92, 102173. [Google Scholar] [CrossRef]
- Sothe, C.; Dalponte, M.; Almeida, C.M.D.; Schimalski, M.B.; Lima, C.L.; Liesenberg, V.; Miyoshi, G.T.; Tommaselli, A.M.G. Tree species classification in a highly diverse subtropical forest integrating UAV-Based photogrammetric point cloud and hyperspectral data. Remote Sens. 2019, 11, 1338. [Google Scholar] [CrossRef]
- Sothe, C.; De Almeida, C.M.; Schimalski, M.B.; La Rosa, L.E.C.; Castro, J.D.B.; Feitosa, R.Q.; Dalponte, M.; Lima, C.L.; Liesenberg, V.; Miyoshi, G.T.; et al. Comparative performance of convolutional neural network, weighted and conventional support vector machine and random forest for classifying tree species using hyperspectral and photogrammetric data. GISci. Remote Sens. 2020, 57, 369–394. [Google Scholar] [CrossRef]
- Tuominen, S.; Näsi, R.; Honkavaara, E.; Balazs, A.; Hakala, T.; Viljanen, N.; Pölönen, I.; Saari, H.; Ojanen, H. Assessment of classifiers and remote sensing features of hyperspectral imagery and stereo-photogrammetric point clouds for recognition of tree species in a forest area of high species diversity. Remote Sens. 2018, 10, 714. [Google Scholar] [CrossRef]
- Ganz, S.; Käber, Y.; Adler, P. Measuring tree height with remote sensing—A comparison of photogrammetric and LiDAR data with different field measurements. Forests 2019, 10, 694. [Google Scholar] [CrossRef]
- Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Shen, X.; Ruan, H. Comparison of UAV LiDAR and digital aerial photogrammetry point clouds for estimating forest structural attributes in subtropical planted forests. Forests 2019, 10, 145. [Google Scholar] [CrossRef]
- Li, M.; Li, Z.; Liu, Q.; Chen, E. Comparison of coniferous plantation heights using unmanned aerial vehicle (UAV) laser scanning and stereo photogrammetry. Remote Sens. 2021, 13, 2885. [Google Scholar] [CrossRef]
- You, H.; Tang, X.; You, Q.; Liu, Y.; Chen, J.; Wang, F. Study on the differences between the extraction results of the structural parameters of individual trees for different tree species based on UAV LiDAR and high-resolution RGB images. Drones 2023, 7, 317. [Google Scholar] [CrossRef]
- Liu, Y.; You, H.; Tang, X.; You, Q.; Huang, Y.; Chen, J. Study on individual tree segmentation of different tree species using different segmentation algorithms based on 3D UAV data. Forests 2023, 14, 1327. [Google Scholar] [CrossRef]
- Gan, Y.; Wang, Q.; Song, G. Non-destructive estimation of deciduous forest metrics: Comparisons between UAV-LiDAR, UAV-DAP, and terrestrial LiDAR leaf-off point clouds using two QSMs. Remote Sens. 2024, 16, 697. [Google Scholar] [CrossRef]
- Iqbal, I.A.; Osborn, J.; Stone, C.; Lucieer, A. A comparison of ALS and dense photogrammetric point clouds for individual tree detection in radiata pine plantations. Remote Sens. 2021, 13, 3536. [Google Scholar] [CrossRef]
- Järnstedt, J.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Holopainen, M.; Viitala, R. Forest variable estimation using a high-resolution digital surface model. ISPRS-J. Photogramm. Remote Sens. 2012, 74, 78–84. [Google Scholar] [CrossRef]
- Surový, P.; Almeida Ribeiro, N.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar]
- Næsset, E.; Gobakken, T.; Jutras-Perreault, M.; Ramtvedt, E.N. Comparing 3D point cloud data from laser scanning and digital aerial photogrammetry for height estimation of small trees and other vegetation in a boreal–alpine ecotone. Remote Sens. 2021, 13, 2469. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Mielcarek, M.; Kamińska, A.; Stereńczak, K. Digital aerial photogrammetry (DAP) and airborne laser scanning (ALS) as sources of information about tree height: Comparisons of the accuracy of remote sensing methods for tree height estimation. Remote Sens. 2020, 12, 1808. [Google Scholar] [CrossRef]
- Moe, K.T.; Owari, T.; Furuya, N.; Hiroshima, T.; Morimoto, J. Application of UAV photogrammetry with LiDAR data to facilitate the estimation of tree locations and DBH values for high-value timber species in northern japanese mixed-wood forests. Remote Sens. 2020, 12, 2865. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; Cosenza, D.N.; Cardil, A.; Silva, C.A.; Botequim, B.; Soares, P.; Silva, M.; González-Ferreiro, E.; Díaz-Varela, R.A. Predicting growing stock volume of eucalyptus plantations using 3-D point clouds derived from UAV imagery and ALS data. Forests 2019, 10, 905. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar]
- Smith, A.R. Color gamut transform pairs. ACM SIGGRAPH Comput. Graph. 1978, 12, 12–19. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar]
- Gao, Y.; Lin, Y.; Wen, X.; Jian, W.; Gong, Y. Vegetation information recognition in visible band based on UAV images. Trans. Chin. Soc. Agric. Eng. 2020, 36, 178–189. [Google Scholar]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially Located Platform and Aerial Photography for Documentation of Grazing Impacts on Wheat. Geocarto Int. 2008, 16, 65–70. [Google Scholar]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color indices for weed identification under various soil, residue, and lighting conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar]
- Meyer, G.E.; Hindman, T.W.; Koppolu, L. Machine vision detection parameters for plant species identification. Proc. SPIE Int. Soc. Opt. Eng. 1999, 3543, 327–335. [Google Scholar]
- Gitelson, A.A.; Stark, R.; Grits, U.; Rundquist, D.; Kaufman, Y.; Derry, D. Vegetation and soil lines in visible spectral space: A concept and technique for remote estimation of vegetation fraction. Int. J. Remote Sens. 2010, 23, 2537–2562. [Google Scholar]
- Merton, R. Monitoring community hysteresis using spectral shift analysis and the red-edge vegetation stress index. In Proceedings of the Seventh Annual JPL Airborne Geoscience Workshop. NASA, Jet Propulsion Laboratory, Pasadena, CA, USA., 12–16 January 1998.
- Huang, J.; Wang, Y.; Wang, F.; Liu, Z. Red edge characteristics and leaf area index estimation model using hyperspectral data for rape. Trans. CSAE 2006, 22, 22–26. [Google Scholar]
- Vogelmann, J.E.; Rock, B.N.; Moss, D.M. Red edge spectral measurements from sugar maple leaves. Int. J. Remote Sens. 2007, 14, 1563–1575. [Google Scholar]
- Wang, Z.J.; Wang, J.H.; Liu, L.Y.; Huang, W.J.; Zhao, C.J.; Wang, C.Z. Prediction of grain protein content in winter wheat (Triticum aestivum L.) using plant pigment ratio (PPR). Field Crops Res. 2004, 90, 311–321. [Google Scholar] [CrossRef]
- Dawson, T.P.; Curran, P.J. A new technique for interpolating the reflectance red edge position. Int. J. Remote Sens. 2010, 19, 2133–2139. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the great plains with ERTS. Environ. Sci. 1974, 48–62. [Google Scholar]
- Gamon, J.A.; Surfus, J.S. Assessing leaf pigment content and activity with a reflectometer. New Phytol. 1999, 143, 105–117. [Google Scholar] [CrossRef]
- Richardson, A.J.; Wiegand, C.L. Distinguishing Vegetation from Soil Background Information. Photogramm. Eng. Remote Sens. 1977, 43, 1541–1552. [Google Scholar]
- Alonzo, M.; Andersen, H.; Morton, D.; Cook, B. Quantifying boreal forest structure and composition using UAV structure from motion. Forests 2018, 9, 119. [Google Scholar] [CrossRef]
- White, J.C.; Tompalski, P.; Coops, N.C.; Wulder, M.A. Comparison of airborne laser scanning and digital stereo imagery for characterizing forest canopy gaps in coastal temperate rainforests. Remote Sens. Environ. 2018, 208, 1–14. [Google Scholar] [CrossRef]
- Wu, X.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Assessment of individual tree detection and canopy cover estimation using unmanned aerial vehicle based light detection and ranging (UAV-LiDAR) data in planted forests. Remote Sens. 2019, 11, 908. [Google Scholar] [CrossRef]
- Man, Q.; Dong, P.; Yang, X.; Wu, Q.; Han, R. Automatic extraction of grasses and individual trees in urban areas based on airborne hyperspectral and LiDAR data. Remote Sens. 2020, 12, 2725. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A Probabilistic interpretation of precision, recall and F-score, with implication for evaluation. In European Conference on Information Retrieval; Springer: Berlin/Heidelberg, Germany, 2005; pp. 345–359. [Google Scholar]
- Sokolova, M.; Japkowicz, N.; Szpakowicz, S. Beyond accuracy, F-Score and ROC: A family of discriminant measures for performance evaluation. In AI 2006: Advances in Artificial Intelligence; Sattar, A., Kang, B., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4304, pp. 1015–1021. ISBN 978-3-540-49787-5. [Google Scholar]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating forest structural attributes using UAV-LiDAR data in Ginkgo plantations. ISPRS-J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Yun, T.; Jiang, K.; Li, G.; Eichhorn, M.P.; Fan, J.; Liu, F.; Chen, B.; An, F.; Cao, L. Individual tree crown segmentation from airborne LiDAR data using a novel Gaussian filter and energy function minimization-based approach. Remote Sens. Environ. 2021, 256, 112307. [Google Scholar]
- Shih, H.; Stow, D.A.; Chang, K.; Roberts, D.A.; Goulias, K.G. From land cover to land use: Applying random forest classifier to Landsat imagery for urban land-use change mapping. Geocarto Int. 2022, 37, 5523–5546. [Google Scholar] [CrossRef]
- Puertas, O.L.; Brenning, A.; Meza, F.J. Balancing misclassification errors of land cover classification maps using support vector machines and Landsat imagery in the Maipo river basin (Central Chile, 1975–2010). Remote Sens. Environ. 2013, 137, 112–123. [Google Scholar]
- Goodbody, T.R.H.; Coops, N.C.; Marshall, P.L.; Tompalski, P.; Crawford, P. Unmanned aerial systems for precision forest inventory purposes: A review and case study. For. Chron. 2017, 93, 71–81. [Google Scholar] [CrossRef]
- Qin, H.; Zhou, W.; Yao, Y.; Wang, W. Individual tree segmentation and tree species classification in subtropical broadleaf forests using UAV-based LiDAR, hyperspectral, and ultrahigh-resolution RGB data. Remote Sens. Environ. 2022, 280, 113143. [Google Scholar] [CrossRef]
- Liu, H. Classification of urban tree species using multi-features derived from four-season RedEdge-MX data. Comput. Electron. Agric. 2022, 194, 106794. [Google Scholar]
- Carbonell-Rivera, J.P.; Torralba, J.; Estornell, J.; Ruiz, L.Á.; Crespo-Peremarch, P. Classification of mediterranean shrub species from UAV point clouds. Remote Sens. 2022, 14, 199. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. UAV remote sensing for urban vegetation mapping using random forest and texture analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef]
- Rösch, M.; Sonnenschein, R.; Buchelt, S.; Ullmann, T. Comparing planet scope and sentinel-2 imagery for mapping mountain pines in the Sarntal Alps, Italy. Remote Sens. 2022, 14, 3190. [Google Scholar] [CrossRef]
- Michałowska, M.; Rapiński, J. A review of tree species classification based on airborne LiDAR data and applied classifiers. Remote Sens. 2021, 13, 353. [Google Scholar] [CrossRef]
- Chen, J.; Chen, Y.; Liu, Z. Classification of typical tree species in laser point cloud based on deep learning. Remote Sens. 2021, 13, 4750. [Google Scholar] [CrossRef]
- Liu, M.; Han, Z.; Chen, Y.; Liu, Z.; Han, Y. Tree species classification of LiDAR data based on 3D deep learning. Measurement 2021, 177, 109301. [Google Scholar]
- Moe, K.; Owari, T.; Furuya, N.; Hiroshima, T. Comparing individual tree height information derived from field surveys, LiDAR and UAV-DAP for high-value timber species in northern Japan. Forests 2020, 11, 223. [Google Scholar] [CrossRef]
- Ma, Y.; Zhao, Y.; Im, J.; Zhao, Y.; Zhen, Z. A deep-learning-based tree species classification for natural secondary forests using unmanned aerial vehicle hyperspectral images and LiDAR. Ecol. Indic. 2024, 159, 111608. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
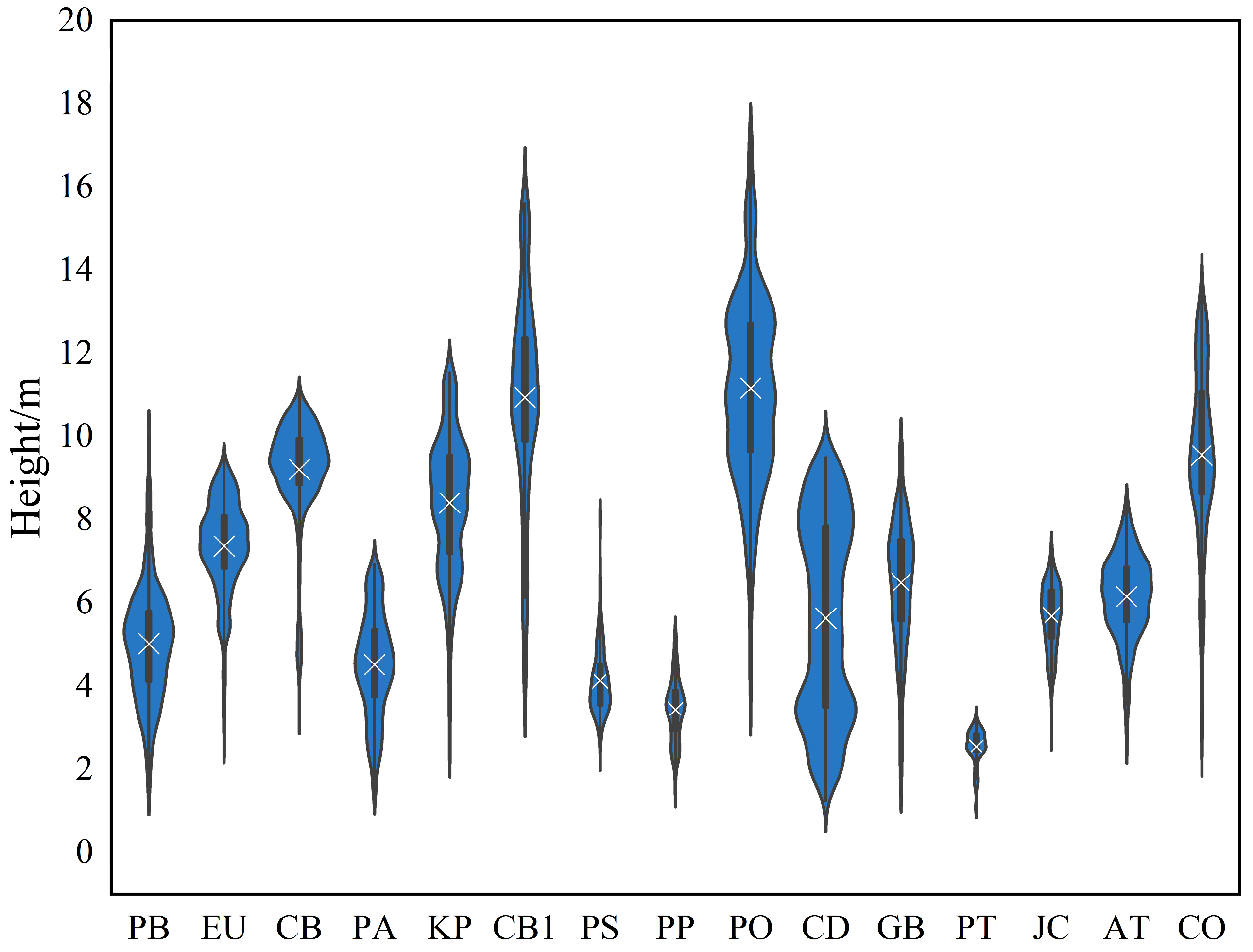
| Tree Species | Abbreviation | Number of Sample Trees |
|---|---|---|
| Pinus bungeana | PB | 25 |
| Eucommia ulmoides | EU | 25 |
| Celtis bungeana | CB | 30 |
| Pinus armandi | PA | 20 |
| Koelreuteria paniculata | KP | 20 |
| Catalpa bungei | CB1 | 15 |
| Prunus serrulata var. lannesiana | PS | 10 |
| Prunus persica | PP | 10 |
| Platanus orientalis | PO | 25 |
| Cedrus deodara | CD | 30 |
| Ginkgo biloba | GB | 15 |
| Pinus tabuliformis | PT | 10 |
| Juniperus chinensis | JC | 10 |
| Acer truncatum | AT | 25 |
| Catalpa ovata | CO | 15 |
| Vegetation Indices | Formulation |
|---|---|
| Difference Enhanced Vegetation Index (DEVI) [42] | |
| Red-Green-Blue Vegetation Index (RGBVI) [43] | |
| Excess Green-Red-Blue Difference Index (EGRBDI) [44] | |
| Green Leaf Index (GLI) [45] | |
| Excess Green Index (EXG) [46] | EXG = 2G − R − B |
| Excess Red Index (EXR) [47] | EXR = 1.4R − G |
| Visible Atmospherically Resistant Index (VARI) [48] |
| Vegetation Indices | Formulation |
|---|---|
| Vogelman Red edge Index 1 (Vog1) [49] | |
| Modified Red Edge Simple Ratio Index (MRENDVI) [50] | |
| Vogelman Red Edge Index (Vog) [51] | |
| Plant pigment ratio (PPR) [52] | |
| Slope of red edge (SL) [53] | |
| Normalized Difference Red Edge (NDRE) [54] | |
| Modified Red Edge Simple Ratio Index (mSR705) [55] | |
| Normalized Vegetation Index (NDVI) [54] | |
| Difference Vegetation Index (DVI) [56] |
| Data | Features | Description | Type |
|---|---|---|---|
| UAV-DAP | RGB (3) | RGB imagery | Spectral |
| HSV (3) | Hue, Saturation, Value | Spectral | |
| DEVI (1) | Difference Enhanced Vegetation Index derived from UAV-based photogrammetry | Spectral | |
| VIs | VIs derived from RGB imagery (Table 2) | Spectral | |
| GLCM (8); | Gray-level Co-occurrence Matrix | Texture | |
| HSVGLCM (24) | GLCM features derived from HSV | Texture | |
| DAP-CHM (1) | Canopy height model derived from UAV-based photogrammetry | Structure | |
| UAV Hyperspectral | MNF20; | The first 20 bands of hyperspectral data after minimum noise fraction rotation | Spectral |
| VOG1; MRESRIVOG; PPR; SL; NDRE; mSR705; NDVI;DVI | VIs derived from hyperspectral data (Table 3) | Spectral | |
| UAV-based LiDAR | CHM-LiDAR; | Canopy height model derived from UAV-based LiDAR data | Structure |
| H1%; H25%; H50%; H75%; H99%; | Cumulative height at 1%, 25%, 50%, 75%, and 99% | Structure | |
| Imean; | Intensity derived from UAV-based LiDAR data | Spectral | |
| I1%; I25%; I50%; I75%; I99%; | Cumulative intensity at 1%, 25%, 50%, 75%, and 99% | Spectral |
| Data | Features | Combination of Different Parameters |
|---|---|---|
| UAV-DAP | Spectral | RGB + VIs + HSV |
| Texture | GLCM + HSVGLCM | |
| Spectral + Texture | RGB + DEVI + GLCM + HSV + HSVGLCM | |
| Spectral + Texture + Structure | RGB + DEVI + GLCM + HSV + HSVGLCM + CHM-DAP | |
| Spectral + Texture + Structure | RGB + VIs + GLCM + HSV + HSVGLCM + CHM-DAP | |
| UAV-based LiDAR | Height and intensity at cumulative percentage | CHM + LI + INT + ELEV |
| Height and intensity at interval percentage | CHM + LI + INT + ELEV |
| Data Type | recall | precision | F-Score |
|---|---|---|---|
| UAV-DAP | 0.77 | 0.82 | 0.79 |
| UAV-based LiDAR | 0.86 | 0.81 | 0.83 |
| Experiment No. | Feature Combination | Overall Accuracy |
|---|---|---|
| 1 | RGB + DEVI + GLCM + HSV + HSVGLCM + CHM-DAP | 69.80% |
| 2 | RGB + VIs + GLCM + HSV + HSVGLCM + CHM-DAP | 63.17% |
| 3 | RGB + DEVI + GLCM + HSV + HSVGLCM | 49.42% |
| 4 | GLCM + HSVGLCM | 48.12% |
| 5 | RGB + VIs + HSV | 26.78% |
| 6 | CHM + LI + INT + ELEV (at cumulative percentage) | 57.32% |
| 7 | CHM + LI + INT + ELEV (at interval percentage) | 50.44% |
| Cell Sizes | Overall Accuracy | Kappa |
|---|---|---|
| 0.3 m | 39.40% | 0.34 |
| 0.5 m | 42.51% | 0.38 |
| 0.7 m | 49.22% | 0.45 |
| 1.0 m | 57.32% | 0.54 |
| Classification Results | UAV-Based Photogrammetry | UAV-Based LiDAR Data | ||
|---|---|---|---|---|
| Overall Accuracy | Kappa Coefficient | Overall Accuracy | Kappa Coefficient | |
| RF classification | 73.83% | 0.72 | 57.32% | 0.54 |
| Individual tree species classification | 80.35% | 0.79 | 79.84% | 0.78 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Man, Q.; Yang, X.; Liu, H.; Zhang, B.; Dong, P.; Wu, J.; Liu, C.; Han, C.; Zhou, C.; Tan, Z.; et al. Comparison of UAV-Based LiDAR and Photogrammetric Point Cloud for Individual Tree Species Classification of Urban Areas. Remote Sens. 2025, 17, 1212. https://doi.org/10.3390/rs17071212
Man Q, Yang X, Liu H, Zhang B, Dong P, Wu J, Liu C, Han C, Zhou C, Tan Z, et al. Comparison of UAV-Based LiDAR and Photogrammetric Point Cloud for Individual Tree Species Classification of Urban Areas. Remote Sensing. 2025; 17(7):1212. https://doi.org/10.3390/rs17071212
Chicago/Turabian StyleMan, Qixia, Xinming Yang, Haijian Liu, Baolei Zhang, Pinliang Dong, Jingru Wu, Chunhui Liu, Changyin Han, Cong Zhou, Zhuang Tan, and et al. 2025. "Comparison of UAV-Based LiDAR and Photogrammetric Point Cloud for Individual Tree Species Classification of Urban Areas" Remote Sensing 17, no. 7: 1212. https://doi.org/10.3390/rs17071212
APA StyleMan, Q., Yang, X., Liu, H., Zhang, B., Dong, P., Wu, J., Liu, C., Han, C., Zhou, C., Tan, Z., & Yu, Q. (2025). Comparison of UAV-Based LiDAR and Photogrammetric Point Cloud for Individual Tree Species Classification of Urban Areas. Remote Sensing, 17(7), 1212. https://doi.org/10.3390/rs17071212