



Deep Learning and Hydrological Feature Constraint Strategies for Dam Detection: Global Application to Sentinel-2 Remote Sensing Imagery



Abstract
1. Introduction
2. DL-HFCS
2.1. Deep Learning
2.1.1. Deep Learning Model
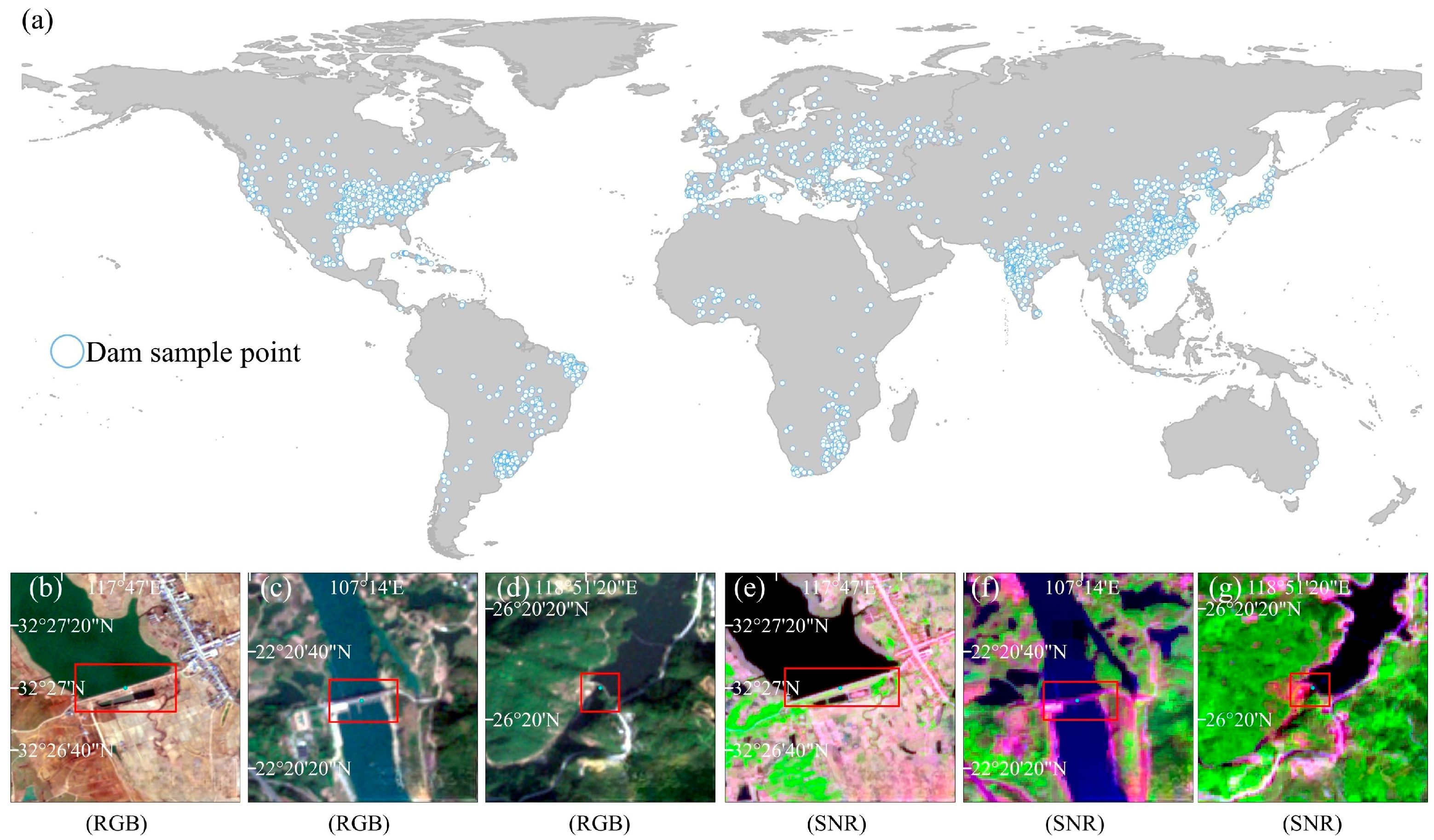
2.1.2. Band Combinations of Dam Samples
2.1.3. Models Training and Detection
2.2. Hydrological Feature Constraint Strategies
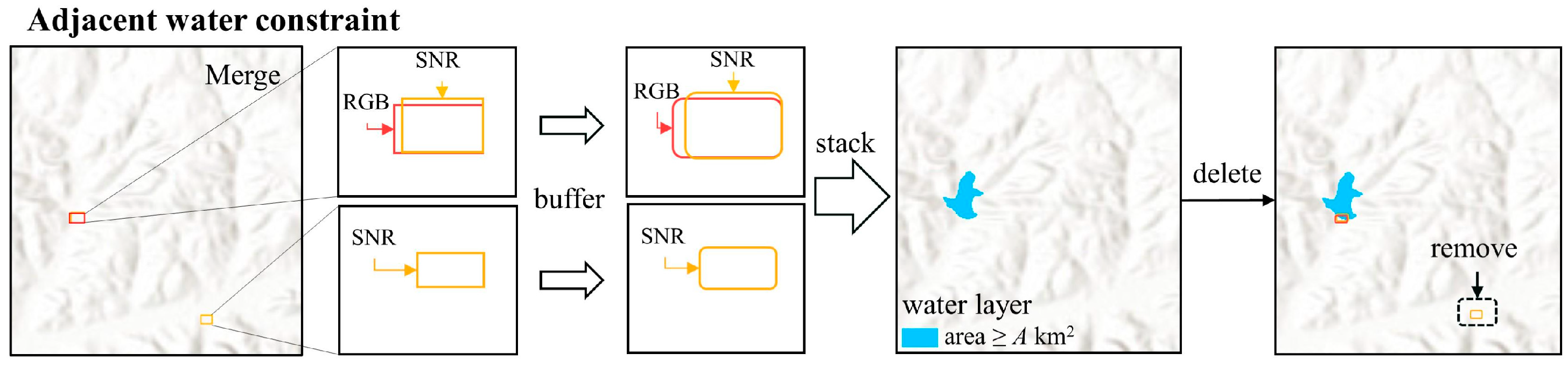
2.2.1. Adjacent Water Body Constraint
2.2.2. Single Reservoir-Based Dam Number Constraint
2.2.3. Watershed River Network Constraint
2.2.4. Detection Box-Based River Network Elevation Difference Constraint
3. Global Experiments
3.1. Test Area
3.2. Data Used
3.2.1. Sentinel-2 MSI Imagery
3.2.2. Google Earth High-Resolution Imagery
3.2.3. AW3D30 DSM
3.2.4. ESRI Land Use and Land Cover (LULC)
3.2.5. Global Dam Datasets
3.3. Methods
3.3.1. Construction of Dam Sample Datasets
3.3.2. Dam Detection Using DL-HFCS
3.3.3. Dam Detection Accuracy Evaluation
4. Results
4.1. Dam Detection Accuracy Using Deep Learning
4.1.1. Validation Set
4.1.2. Prediction Set
4.2. Dam Detection Accuracy Using DL-HFCS
4.3. Stratified Accuracy Assessment
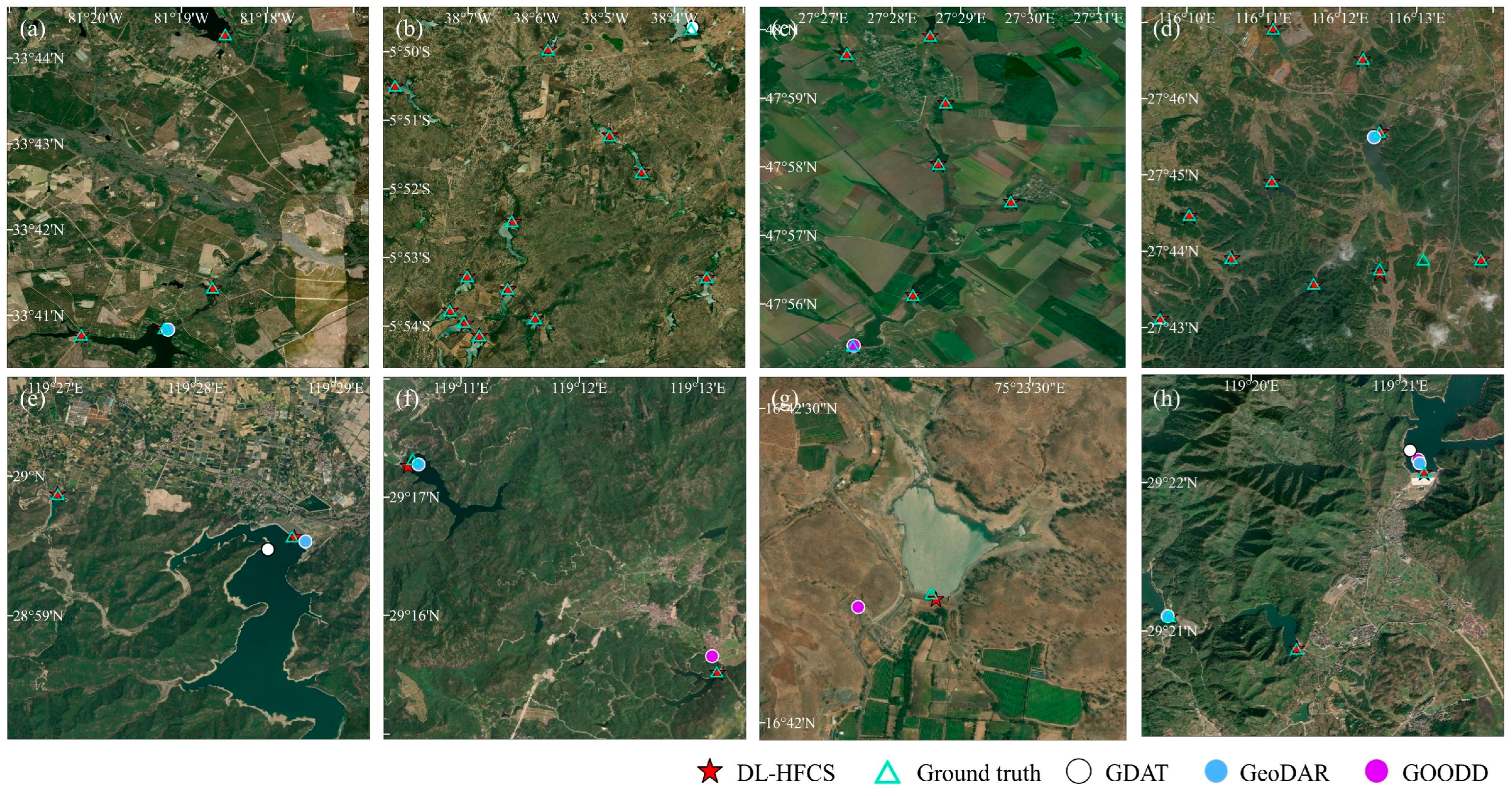
4.4. Comparison with Existing Global Dam Datasets
5. Discussion
5.1. Impact of HFCS on Dam Detection Performance
5.2. Analysis of False Detections
5.3. Strengths and Limitations of DL-HFCS
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zarfl, C.; Lumsdon, A.E.; Berlekamp, J.; Tydecks, L.; Tockner, K. A Global Boom in Hydropower Dam Construction. Aquat. Sci. 2015, 77, 161–170. [Google Scholar]
- Grill, G.; Lehner, B.; Thieme, M.; Geenen, B.; Tickner, D.; Antonelli, F.; Babu, S.; Borrelli, P.; Cheng, L.; Crochetiere, H.; et al. Mapping the World’s Free-Flowing Rivers. Nature 2019, 569, 215–221. [Google Scholar] [CrossRef] [PubMed]
- Belletti, B.; Garcia de Leaniz, C.; Jones, J.; Bizzi, S.; Börger, L.; Segura, G.; Castelletti, A.; van de Bund, W.; Aarestrup, K.; Barry, J.; et al. More than One Million Barriers Fragment Europe’s Rivers. Nature 2020, 588, 436–441. [Google Scholar] [PubMed]
- Boulange, J.; Hanasaki, N.; Yamazaki, D.; Pokhrel, Y. Role of Dams in Reducing Global Flood Exposure under Climate Change. Nat. Commun. 2021, 12, 417. [Google Scholar]
- Januchowski-Hartley, S.R.; McIntyre, P.B.; Diebel, M.; Doran, P.J.; Infante, D.M.; Joseph, C.; Allan, J.D. Restoring Aquatic Ecosystem Connectivity Requires Expanding Inventories of Both Dams and Road Crossings. Front. Ecol. Environ. 2013, 11, 211–217. [Google Scholar]
- Mantel, S.K.; Rivers-Moore, N.; Ramulifho, P. Small Dams Need Consideration in Riverscape Conservation Assessments. Aquat. Conserv. Mar. Freshw. Ecosyst. 2017, 27, 748–754. [Google Scholar] [CrossRef]
- Grinham, A.; Albert, S.; Deering, N.; Dunbabin, M.; Bastviken, D.; Sherman, B.; Lovelock, C.E.; Evans, C.D. The Importance of Small Artificial Water Bodies as Sources of Methane Emissions in Queensland, Australia. Hydrol. Earth Syst. Sci. 2018, 22, 5281–5298. [Google Scholar] [CrossRef]
- Carolli, M.; Garcia de Leaniz, C.; Jones, J.; Belletti, B.; Huđek, H.; Pusch, M.; Pandakov, P.; Börger, L.; van de Bund, W. Impacts of Existing and Planned Hydropower Dams on River Fragmentation in the Balkan Region. Sci. Total Environ. 2023, 871, 161940. [Google Scholar] [CrossRef]
- Lehner, B.; Beames, P.; Mulligan, M.; Zarfl, C.; De Felice, L.; van Soesbergen, A.; Thieme, M.; Garcia de Leaniz, C.; Anand, M.; Belletti, B.; et al. The Global Dam Watch Database of River Barrier and Reservoir Information for Large-Scale Applications. Sci. Data 2024, 11, 1069. [Google Scholar]
- Cracknell, A.P. The Development of Remote Sensing in the Last 40 Years. Int. J. Remote Sens. 2018, 39, 8387–8427. [Google Scholar] [CrossRef]
- Chang, L.; Cheng, L.; Chen, J.; Han, D.; Zhang, L.; Liu, P.; Chang, J. Comparison and Application of Georeferenced Reservoir and Dam Data Sets. China Rural Water Hydropower. 2023, 6, 1–11. [Google Scholar]
- Zhang, Z.; Liu, Q.; Wang, Y. Road Extraction by Deep Residual U-Net. IEEE Geosci. Remote Sens. Lett. 2018, 15, 749–753. [Google Scholar]
- Zuo, J.; Xu, G.; Fu, K.; Sun, X.; Sun, H. Aircraft Type Recognition Based on Segmentation with Deep Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 282–286. [Google Scholar]
- Bentes, C.; Velotto, D.; Tings, B. Ship Classification in TerraSAR-X Images With Convolutional Neural Networks. IEEE J. Ocean. Eng. 2018, 43, 258–266. [Google Scholar]
- Audebert, N.; Le Saux, B.; Lefèvre, S. Beyond RGB: Very High Resolution Urban Remote Sensing with Multimodal Deep Networks. ISPRS J. Photogramm. Remote Sens. 2018, 140, 20–32. [Google Scholar]
- Shen, Y.; Xu, S. Effective method for dam recognition from visible images. Comput. Appl. 2006, 08, 1972–1974. [Google Scholar]
- Fang, W.; Sun, Y.; Ji, R.; Wan, W.; Ma, L. Recognizing Global Dams from High-Resolution Remotely Sensed Images Using Convolutional Neural Networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6363–6371. [Google Scholar] [CrossRef]
- Lehner, B.; Liermann, C.R.; Revenga, C.; Vörösmarty, C.; Fekete, B.; Crouzet, P.; Döll, P.; Endejan, M.; Frenken, K.; Magome, J.; et al. High-resolution Mapping of the World’s Reservoirs and Dams for Sustainable River-flow Management. Front. Ecol. Environ. 2011, 9, 494–502. [Google Scholar]
- Wang, J.; Walter, B.A.; Yao, F.; Song, C.; Ding, M.; Maroof, A.S.; Zhu, J.; Fan, C.; McAlister, J.M.; Sikder, S.; et al. GeoDAR: Georeferenced Global Dams and Reservoirs Dataset for Bridging Attributes and Geolocations. Earth Syst. Sci. Data 2022, 14, 1869–1899. [Google Scholar]
- Mulligan, M.; Van Soesbergen, A.; Sáenz, L. GOODD, a Global Dataset of More than 38,000 Georeferenced Dams. Sci. Data 2020, 7, 31. [Google Scholar]
- Zhang, A.T.; Gu, V.X. Global Dam Tracker: A Database of More than 35,000 Dams with Location, Catchment, and Attribute Information. Sci. Data 2023, 10, 111. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Xiao, X.; Qin, Y.; Dong, J.; Wu, J.; Li, B. Improved Maps of Surface Water Bodies, Large Dams, Reservoirs, and Lakes in China. Earth Syst. Sci. Data 2022, 14, 3757–3771. [Google Scholar] [CrossRef]
- Paredes-Beltran, B.; Sordo-Ward, A.; Garrote, L. Dataset of Georeferenced Dams in South America (DDSA). Earth Syst. Sci. Data 2021, 13, 213–229. [Google Scholar] [CrossRef]
- Speckhann, G.A.; Kreibich, H.; Merz, B. Inventory of Dams in Germany. Earth Syst. Sci. Data 2021, 13, 731–740. [Google Scholar] [CrossRef]
- Song, C.; Fan, C.; Zhu, J.; Wang, J.; Sheng, Y.; Liu, K.; Chen, T.; Zhan, P.; Luo, S.; Yuan, C.; et al. A Comprehensive Geospatial Database of Nearly 100 000 Reservoirs in China. Earth Syst. Sci. Data 2022, 14, 4017–4034. [Google Scholar] [CrossRef]
- Fan, C.; Song, C.; Wang, J.; Sheng, Y.; Lin, Y.; Yuan, C.; Safat Sikder, M.; Crétaux, J.-F.; Liu, K.; Chen, T.; et al. Emerging Global Reservoirs in the New Millennium: Abundance, Hotspots, and Total Water Storage. Sci. Bull. 2024, 69, 2179–2182. [Google Scholar] [CrossRef]
- Mao, J.; Cheng, L.; Ji, C.; Jing, M.; Duan, Z.; Li, N.; Gesang, Z.; Li, M. Verification of Dam Spatial Location in Open Datasets Based on Geographic Knowledge and Deep Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 7277–7287. [Google Scholar] [CrossRef]
- Jing, M.; Cheng, L.; Ji, C.; Mao, J.; Li, N.; Duan, Z.; Li, Z.; Li, M. Detecting Unknown Dams from High-Resolution Remote Sensing Images: A Deep Learning and Spatial Analysis Approach. Int. J. Appl. Earth Obs. Geoinformation 2021, 104, 102576. [Google Scholar] [CrossRef]
- Jing, Y.; Ren, Y.; Liu, Y.; Wang, D.; Yu, L. Dam Extraction from High-Resolution Satellite Images Combined with Location Based on Deep Transfer Learning and Post-Segmentation with an Improved MBI. Remote Sens. 2022, 14, 4049. [Google Scholar] [CrossRef]
- Wang, L.; Xu, Y.; Chen, Q.; Wu, J.; Luo, J.; Li, X.; Peng, R.; Li, J. Research on Remote-Sensing Identification Method of Typical Disaster-Bearing Body Based on Deep Learning and Spatial Constraint Strategy. Remote Sens. 2024, 16, 1161. [Google Scholar] [CrossRef]
- Zhao, G.; Yao, P.; Fu, L.; Zhang, Z.; Lu, S.; Long, T. A Deep Learning Method Based on Two-Stage CNN Framework for Recognition of Chinese Reservoirs with Sentinel-2 Images. Water 2022, 14, 3755. [Google Scholar] [CrossRef]
- Cao, Y.; Weng, Q. A Deep Learning-Based Super-Resolution Method for Building Height Estimation at 2.5 m Spatial Resolution in the Northern Hemisphere. Remote Sens. Environ. 2024, 310, 114241. [Google Scholar]
- Zeng, F.; Cheng, L.; Li, N.; Xia, N.; Ma, L.; Zhou, X.; Li, M. A Hierarchical Airport Detection Method Using Spatial Analysis and Deep Learning. Remote Sens. 2019, 11, 2204. [Google Scholar] [CrossRef]
- Li, N.; Cheng, L.; Huang, L.; Ji, C.; Jing, M.; Duan, Z.; Li, J.; Li, M. Framework for Unknown Airport Detection in Broad Areas Supported by Deep Learning and Geographic Analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6328–6338. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Proceedings of the Computer Vision—ECCV 2016, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar]
- DETRs Beat YOLOs on Real-Time Object Detection|IEEE Conference Publication|IEEE Xplore. Available online: https://ieeexplore.ieee.org/document/10657220 (accessed on 4 March 2025).
- Jocher, G.; Chaurasia, A.; Stoken, A.; Borovec, J.; NanoCode012; Kwon, Y.; Michael, K.; TaoXie; Fang, J.; imyhxy; et al. Ultralytics/Yolov5. Available online: https://github.com/ultralytics/yolov5 (accessed on 10 December 2024).
- Wang, C.-Y.; Mark Liao, H.-Y.; Wu, Y.-H.; Chen, P.-Y.; Hsieh, J.-W.; Yeh, I.-H. CSPNet: A New Backbone That Can Enhance Learning Capability of CNN. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020; pp. 1571–1580. [Google Scholar]
- Fang, W.; Wang, C.; Chen, X.; Wan, W.; Li, H.; Zhu, S.; Fang, Y.; Liu, B.; Hong, Y. Recognizing Global Reservoirs from Landsat 8 Images: A Deep Learning Approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3168–3177. [Google Scholar]
- Chen, Q.; Mudd, S.M.; Attal, M.; Hancock, S. Extracting an Accurate River Network: Stream Burning Re-Revisited. Remote Sens. Environ. 2024, 312, 114333. [Google Scholar]
- He, C.; Yang, C.-J.; Turowski, J.M.; Ott, R.F.; Braun, J.; Tang, H.; Ghantous, S.; Yuan, X.; Stucky de Quay, G. A Global Dataset of the Shape of Drainage Systems. Earth Syst. Sci. Data 2024, 16, 1151–1166. [Google Scholar]
- Frantz, D.; Haß, E.; Uhl, A.; Stoffels, J.; Hill, J. Improvement of the Fmask Algorithm for Sentinel-2 Images: Separating Clouds from Bright Surfaces Based on Parallax Effects. Remote Sens. Environ. 2018, 215, 471–481. [Google Scholar]
- Brown, C.F.; Brumby, S.P.; Guzder-Williams, B.; Birch, T.; Hyde, S.B.; Mazzariello, J.; Czerwinski, W.; Pasquarella, V.J.; Haertel, R.; Ilyushchenko, S.; et al. Dynamic World, Near Real-Time Global 10 m Land Use Land Cover Mapping. Sci. Data 2022, 9, 251. [Google Scholar]
- Lesiv, M.; See, L.; Laso Bayas, J.C.; Sturn, T.; Schepaschenko, D.; Karner, M.; Moorthy, I.; McCallum, I.; Fritz, S. Characterizing the Spatial and Temporal Availability of Very High Resolution Satellite Imagery in Google Earth and Microsoft Bing Maps as a Source of Reference Data. Land 2018, 7, 118. [Google Scholar] [CrossRef]
- Liang, J.; Gong, J.; Li, W. Applications and Impacts of Google Earth: A Decadal Review (2006–2016). ISPRS J. Photogramm. Remote Sens. 2018, 146, 91–107. [Google Scholar]
- Tadono, T.; Nagai, H.; Ishida, H.; Oda, F.; Naito, S.; Minakawa, K.; Iwamoto, H. GENERATION OF THE 30 M-MESH GLOBAL DIGITAL SURFACE MODEL BY ALOS PRISM. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B4, 157–162. [Google Scholar]
- Takaku, J.; Tadono, T.; Tsutsui, K.; Ichikawa, M. VALIDATION OF “AW3D” GLOBAL DSM GENERATED FROM ALOS PRISM. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III–4, 25–31. [Google Scholar]
- Karra, K.; Kontgis, C.; Statman-Weil, Z.; Mazzariello, J.C.; Mathis, M.; Brumby, S.P. Global Land Use/Land Cover with Sentinel 2 and Deep Learning. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 4704–4707. [Google Scholar]
- Venter, Z.S.; Barton, D.N.; Chakraborty, T.; Simensen, T.; Singh, G. Global 10 m Land Use Land Cover Datasets: A Comparison of Dynamic World, World Cover and Esri Land Cover. Remote Sens. 2022, 14, 4101. [Google Scholar] [CrossRef]
- Xia, G.-S.; Bai, X.; Ding, J.; Zhu, Z.; Belongie, S.; Luo, J.; Datcu, M.; Pelillo, M.; Zhang, L. DOTA: A Large-Scale Dataset for Object Detection in Aerial Images. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 3974–3983. [Google Scholar]
- Li, K.; Wan, G.; Cheng, G.; Meng, L.; Han, J. Object Detection in Optical Remote Sensing Images: A Survey and a New Benchmark. ISPRS J. Photogramm. Remote Sens. 2020, 159, 296–307. [Google Scholar]
- Chen, Y.; Wang, B.; Guo, X.; Zhu, W.; He, J.; Liu, X.; Yuan, J. DEYOLO: Dual-Feature-Enhancement YOLO for Cross-Modality Object Detection. In Proceedings of the Pattern Recognition—ICPR 2024, Kolkata, India, 1–5 December 2024; pp. 236–252. [Google Scholar]
- Geraldes, A.M.; Boavida, M.-J. Seasonal Water Level Fluctuations: Implications for Reservoir Limnology and Management. Lakes Reserv. Sci. Policy Manag. Sustain. Use 2005, 10, 59–69. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Optimizer | Learning Rate | Momentum | Weight Decay | Epochs | Batch Size |
| YOLOv5s (RGB) | SGD | 0.01 | 0.937 | 0.0005 | 200 | 8 |
| YOLOv5s (SNR) | SGD | 0.01 | 0.937 | 0.0005 | 200 | 8 |
| Model | Precision (%) | Recall (%) | F1 (%) | mAP@0.5 (%) |
|---|---|---|---|---|
| YOLOv5s (RGB) | 81.0 | 73.4 | 77.0 | 69.9 |
| YOLOv5s (SNR) | 81.9 | 71.1 | 76.1 | 76.1 |
| YOLOv11n (RGB) | 66.4 | 63.3 | 64.8 | 60.8 |
| YOLOv11n (SNR) | 73.8 | 60.9 | 66.7 | 71.9 |
| RT-DETR (RGB) | 73.6 | 66.2 | 69.7 | 60.3 |
| RT-DETR (SNR) | 80.7 | 77.3 | 79.0 | 77.3 |
| DEYOLO | 72.8 | 59.6 | 65.5 | 64.6 |
| YOLOv5s (SNRGB) | 81.8 | 55.6 | 66.2 | 71.0 |
| Model | Precision (%) | Recall (%) | F1 (%) |
|---|---|---|---|
| YOLOv5s (RGB) | 42.78 | 73.19 | 53.60 |
| YOLOv5s (SNR) | 35.78 | 84.14 | 50.21 |
| Merge | 38.71 | 89.08 | 53.97 |
| Constraints | Precision (%) | Recall (%) | F1 (%) |
|---|---|---|---|
| adjacent water body | 77.12 | 89.08 | 82.67 |
| single reservoir-based dam number | 81.43 | 87.39 | 84.30 |
| watershed river network | 84.14 | 83.48 | 83.81 |
| detection box-based river network elevation difference | 86.29 | 82.26 | 84.23 |
| Density | Precision (%) | Recall (%) | F1 (%) |
|---|---|---|---|
| High | 90.45 | 83.98 | 87.10 |
| Medium | 71.17 | 75.69 | 73.36 |
| Low | 76.45 | 77.10 | 76.77 |
| Dataset | Count | 0 m (%) | (0, 50] m (%) | (50, 100] m (%) | >100 m (%) |
|---|---|---|---|---|---|
| GeoDAR | 1043 | 69.42 | 15.92 | 6.62 | 8.05 |
| GDAT | 983 | 73.65 | 12.41 | 7.43 | 9.56 |
| GOODD | 926 | 58.53 | 12.53 | 10.37 | 18.57 |
| DL-HFCS | 9903 | 98.08 | 0.68 | 0.78 | 0.46 |
| Constraints | Qualified | Unqualified | Proportion (%) |
|---|---|---|---|
| single reservoir-based dam number | 11,890 | 148 | 98.77 |
| watershed river network | 11,458 | 580 | 95.18 |
| elevation difference (multi-branches) | 5638 | 9 | 99.84 |
| elevation difference (one branch) | 5520 | 291 | 94.99 |
| All | 11,056 | 982 | 91.84 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, H.; Gao, Y.; Fei, Y.; Sun, Y.; Tian, Y. Deep Learning and Hydrological Feature Constraint Strategies for Dam Detection: Global Application to Sentinel-2 Remote Sensing Imagery. Remote Sens. 2025, 17, 1194. https://doi.org/10.3390/rs17071194
Gu H, Gao Y, Fei Y, Sun Y, Tian Y. Deep Learning and Hydrological Feature Constraint Strategies for Dam Detection: Global Application to Sentinel-2 Remote Sensing Imagery. Remote Sensing. 2025; 17(7):1194. https://doi.org/10.3390/rs17071194
Chicago/Turabian StyleGu, Hongyuan, Yongnian Gao, Yasen Fei, Yongqi Sun, and Yanjun Tian. 2025. "Deep Learning and Hydrological Feature Constraint Strategies for Dam Detection: Global Application to Sentinel-2 Remote Sensing Imagery" Remote Sensing 17, no. 7: 1194. https://doi.org/10.3390/rs17071194
APA StyleGu, H., Gao, Y., Fei, Y., Sun, Y., & Tian, Y. (2025). Deep Learning and Hydrological Feature Constraint Strategies for Dam Detection: Global Application to Sentinel-2 Remote Sensing Imagery. Remote Sensing, 17(7), 1194. https://doi.org/10.3390/rs17071194