
Hyperspectral Data Can Classify Plant Functional Groups Within New Zealand Hill Farm Pasture



Abstract

1. Introduction
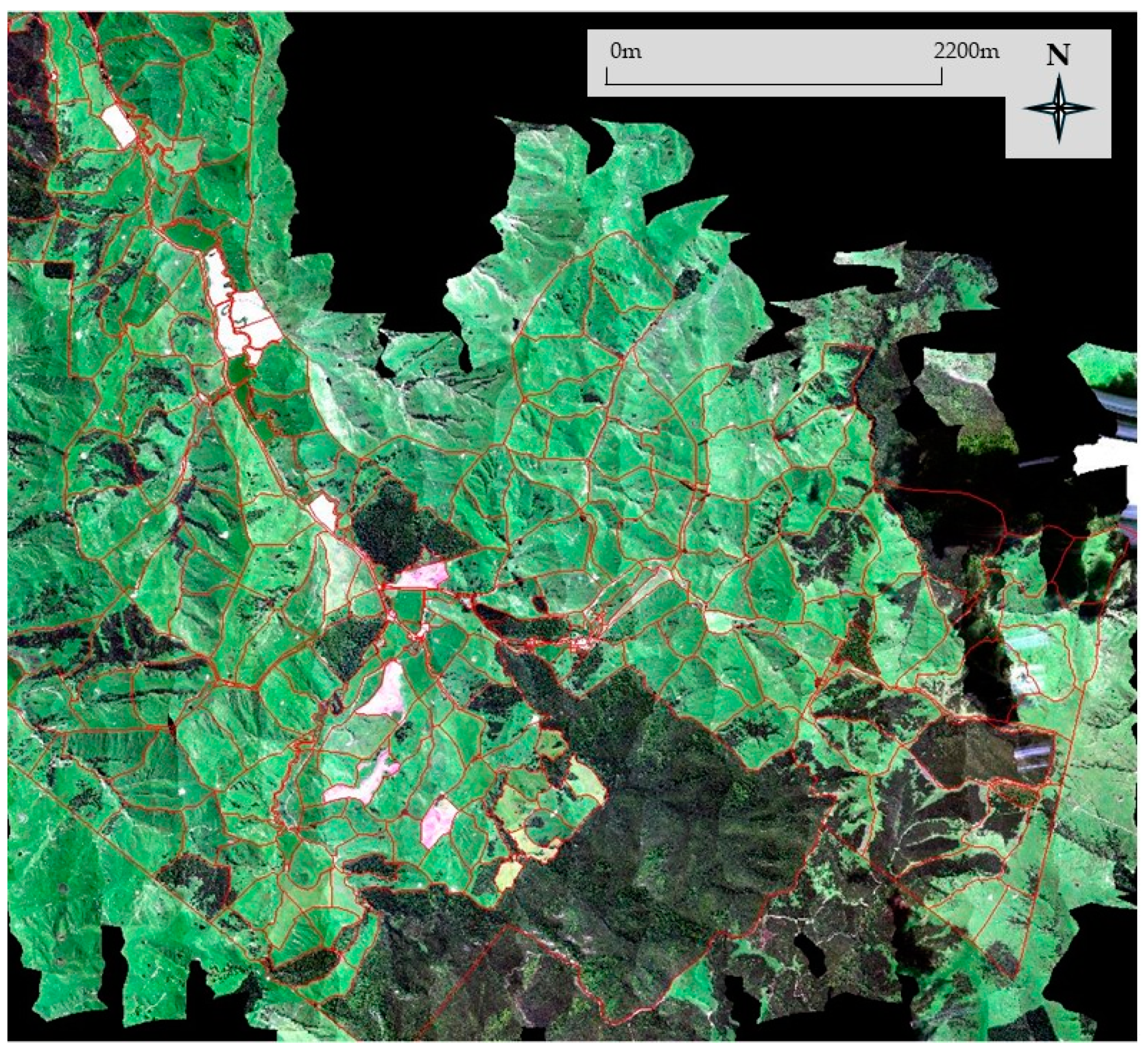
- This study used off-the-shelf software and methods to map pasture PFGs to a 1 m2 spatial resolution across a 2600 ha farm landscape, showing that complicated methods are not necessary to gain utility from these data.
- The resulting map was validated across 76 ha to provide farming and extension practitioners confidence in results and to encourage its adoption in farming extension endeavours.
2. Materials and Methods
2.1. Site Location
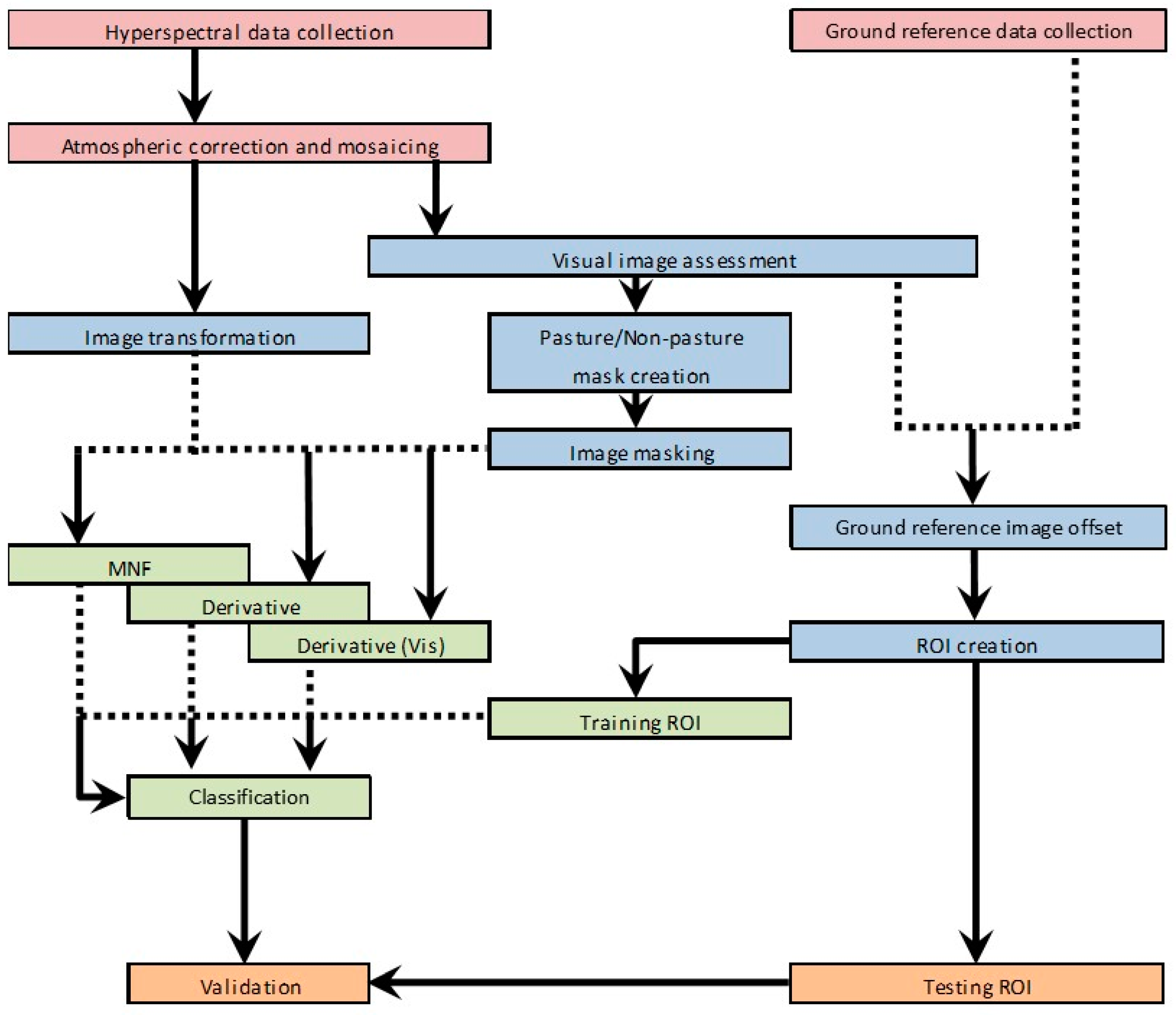
2.2. Method Overview
- A combination of hyperspectral imagery and surveyed ground data is used to classify the pasture into three classes representing HFR (ryegrass), LFT (browntop), and legumes (clover) in a method similar to that used by Lambert et al. [27].
- Information was collected on homogeneous paddocks to expand the validation of the original classification and provide greater confidence in the results.
- Another site visit was made to identify specific features visible in the classification results; the features were cross-checked and discussed with the farm manager and owner to obtain their perspective.
2.2.1. Hyperspectral Aerial Survey
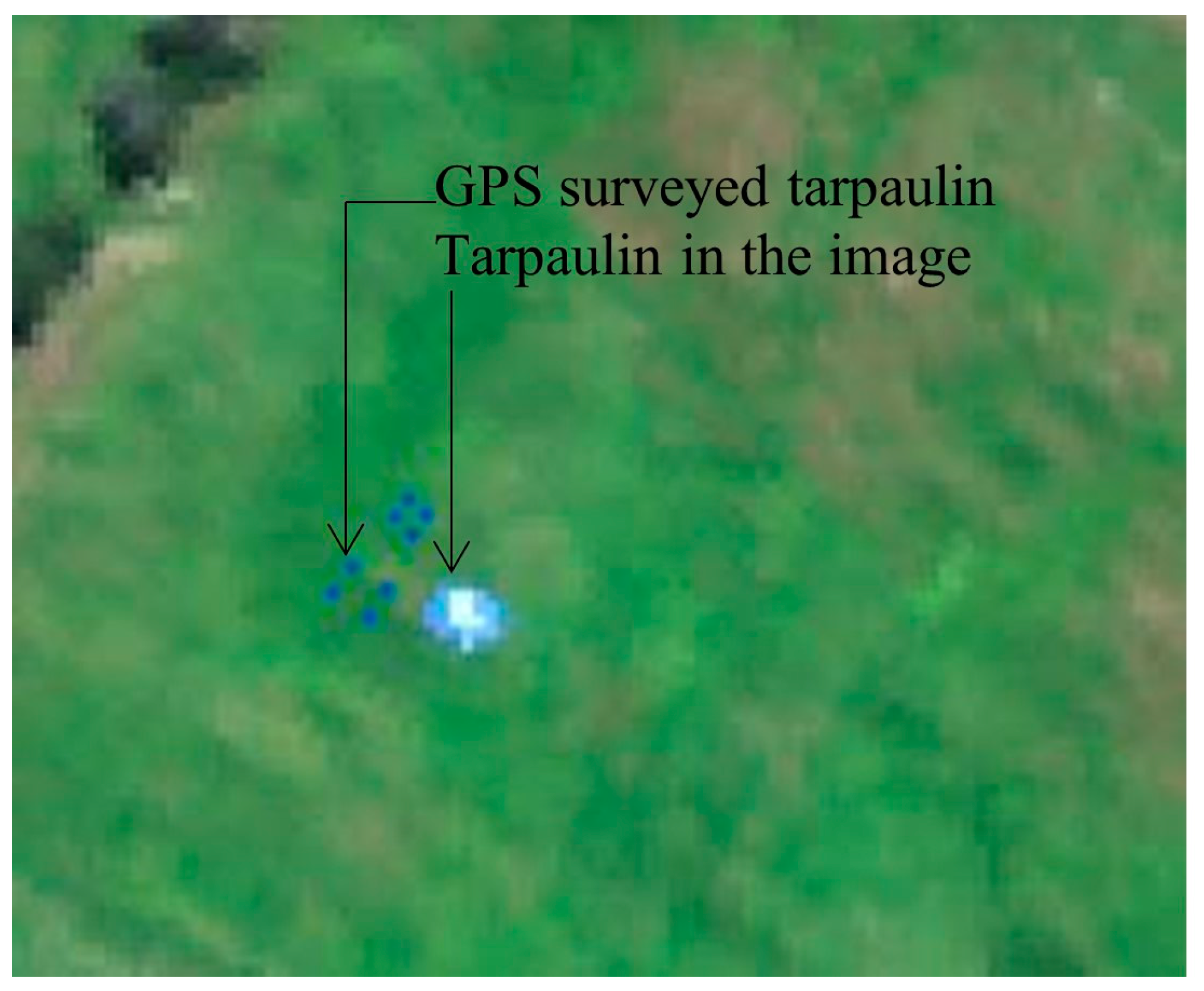
2.2.2. Ground Data Collection (Tarpaulin Sites) Class Assignment
2.2.3. Ground Data Collection (Paddock Sites)
2.2.4. Non-Pasture Masking
2.2.5. Image Transformation
2.3. SVM Classification
2.3.1. SVM Region of Interest Collection
2.3.2. Farm Pasture Regions of Interest
2.4. On-Farm Validation Visit
3. Results
3.1. Positional Accuracy
3.2. Tarpaulin Site Classification
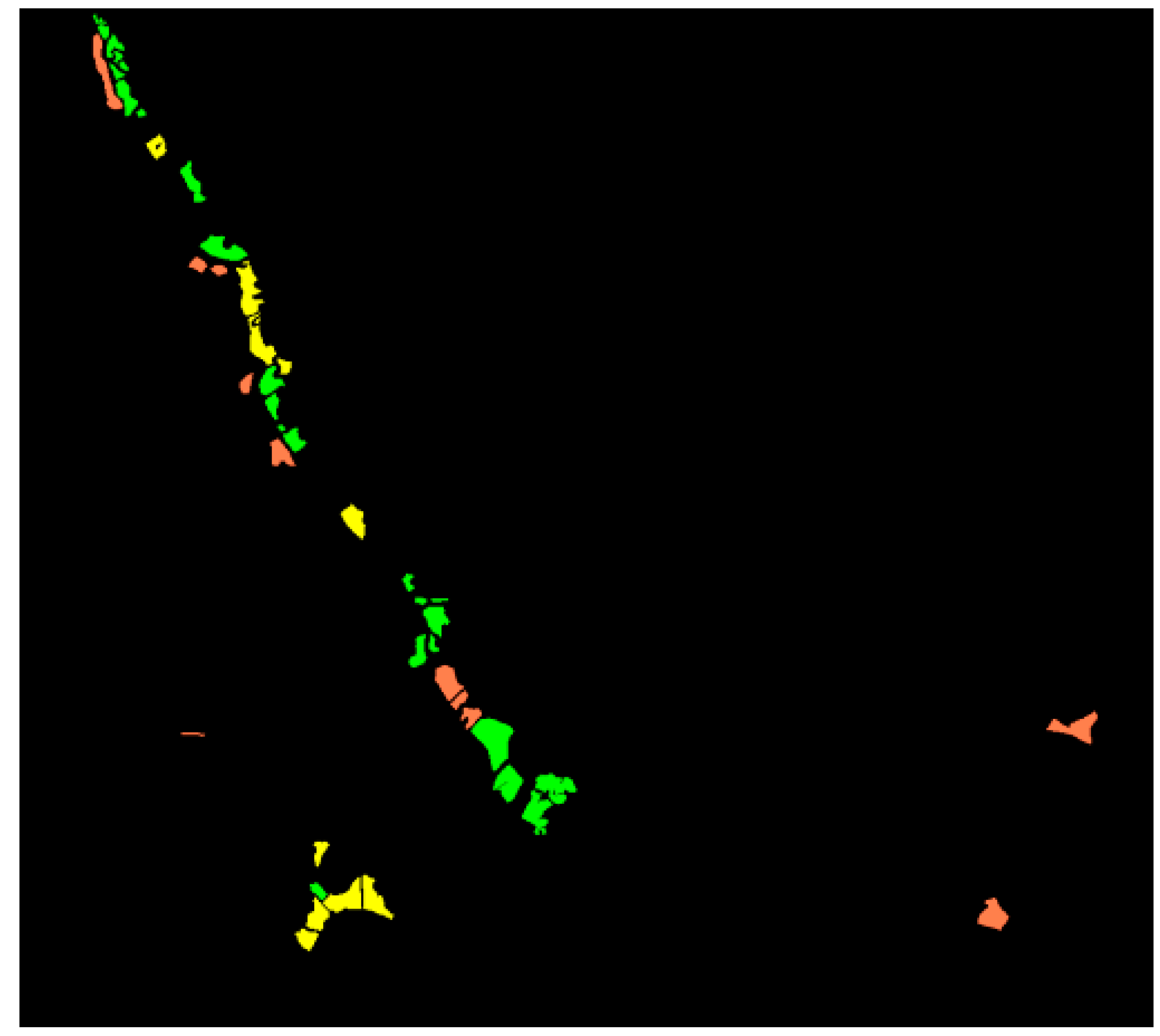
3.3. Classification Validation (Paddock Sites)
3.3.1. On-Farm Validation
3.3.2. Classification Feature, On-Farm Validation 1
3.3.3. Classification Feature, On-Farm Validation 2
3.3.4. Classification Feature, On-Farm Validation 3
4. Discussion
4.1. Remote Sensing
4.2. Classifier Performance Assessment
4.3. On-Farm Validation Features
4.4. Management Support
4.5. Pasture Growth Model Building
4.6. Implications for Fertility Management
4.7. Accessibility of Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sanches, I.D.A. Hyperspectral Proximal Sensing of the Botanical Composition and Nutrient Content of New Zealand Pastures. Ph.D. Thesis, Massey University, Palmerston North, New Zealand, 2009. [Google Scholar]
- Sobhan, M.I. Species Discrimination from a Hyperspectral Perspective; Wageningen University and Research: Wageningen, The Netherlands, 2007. [Google Scholar]
- Thulin, S. Hyperspectral Remote Sensing of Temperate Pasture Quality. Ph.D. Thesis, RMIT University, Melbourne, VIC, Australia, 2008. [Google Scholar]
- Park, B.; Lu, R. Hyperspectral Imaging Technology in Food and Agriculture; Food engineering series; Springer: New York, NY, USA, 2015. [Google Scholar]
- Möckel, T. Hyperspectral and Multispectral Remote Sensing for Mapping Grassland Vegetation; Department of Physical Geography and Ecosystem Science, Lund University: Lund, Sweden, 2015. [Google Scholar]
- Möckel, T.; Dalmayne, J.; Schmid, B.; Prentice, H.; Hall, K. Airborne Hyperspectral Data Predict Fine-Scale Plant Species Diversity in Grazed Dry Grasslands. Remote Sens. 2016, 8, 133. [Google Scholar] [CrossRef]
- Peng, Y.; Fan, M.; Bai, L.; Sang, W.; Feng, J.; Zhao, Z.; Tao, Z. Identification of the best hyperspectral indices in estimating plant species richness in sandy grasslands. Remote Sens. 2019, 11, 588. [Google Scholar] [CrossRef]
- Zhu, X.; Bi, Y.; Du, J.; Gao, X.; Zhang, T.; Pi, W.; Zhang, Y.; Wang, Y.; Zhang, H. Research on deep learning method recognition and a classification model of grassland grass species based on unmanned aerial vehicle hyperspectral remote sensing. Grassl. Sci. 2023, 69, 3–11. [Google Scholar] [CrossRef]
- Marcinkowska-Ochtyra, A.; Jarocińska, A.; Bzdȩga, K.; Tokarska-Guzik, B. Classification of expansive grassland species in different growth stages based on hyperspectral and LiDAR data. Remote Sens. 2018, 10, 2019. [Google Scholar] [CrossRef]
- White, M.D.; Metherell, A.K.; Roberts, A.H.C.; Meyer, R.E.; Cushnahan, T.A. Economics of a variable rate fertiliser strategy on a Whanganui hill country station. J. N. Z. Grassl. 2017, 79, 125–129. [Google Scholar] [CrossRef]
- Sanderson, K.; Webster, M. Economic Analysis of the Value of Pasture to the New Zealand Economy; Report to Pasture Renewal Charitable Trust; BERL: Wellington, New Zealand, 2009; p. 42. [Google Scholar]
- Barenbrug NZ Ltd.; Pasture Renewal Charitable Trust (PRCT). Encouraging Farmers to Renew 10% of Pasture Annually. Barenbrug NZ Ltd. Available online: https://www.barenbrug.co.nz/news/pasture-renewal-charitable-trust-(prct)-encouraging-farmers-to-renew-10-of-pasture-annually.htm (accessed on 15 November 2024).
- Lambert, M.G.; Clark, D.; Litherland, A. Advances in pasture management for animal productivity and health. N. Z. Vet. J. 2004, 52, 311–319. [Google Scholar] [CrossRef]
- Lambert, M.G.; Barker, D.J.; Mackay, A.D.; Springett, J. Biophysical indicators of sustainabillty of North Island hill pasture systems. In Proceedings of the Conference-New Zealand Grassland Association, Waitangi, New Zealand, 4–7 March 1996. [Google Scholar]
- López, I.F.; Valentine, I.; Lambert, M.G.; Hedderley, D.I.; Kemp, P.D. Plant functional groups in a heterogeneous environment. N. Z. J. Agric. Res. 2006, 49, 439–450. [Google Scholar] [CrossRef]
- Kemp, P. (Massey University, Palmerston North, New Zealand). Personal Communication, 2017.
- Jackman, R.; Mouat, M. Browntop and pasture nutrition. In Proceedings of the Conference New Zealand Grassland Association, Oamaru, New Zealand, 17–20 October 1994. [Google Scholar]
- Hill, M.; Carey, P. Prediction of yield in the Rothamsted Park Grass Experiment by Ellenberg indicator values. J. Veg. Sci. 1997, 8, 579–586. [Google Scholar] [CrossRef]
- Zhang, B.; Valentine, I.; Kemp, P. Modelling the productivity of naturalised pasture in the North Island, New Zealand: A decision tree approach. Ecol. Model. 2005, 186, 299–311. [Google Scholar] [CrossRef]
- Grime, J.P. Plant Strategies and Vegetation Processes; John Wiley and Sons: Hoboken, NJ, USA, 1979. [Google Scholar]
- Ellenberg, H. Vegetation Ecology of Central Europe; Cambridge University Press: Cambridge, UK, 1988. [Google Scholar]
- Grime, J.P. Vegetation classification by reference to strategies. Nature 1974, 250, 26–31. [Google Scholar] [CrossRef]
- Calbi, M.; Boenisch, G.; Boulangeat, I.; Bunker, D.; Catford, J.A.; Changenet, A.; Culshaw, V.; Dias, A.S.; Hauck, T.; Joschinski, J.; et al. A novel framework to generate plant functional groups for ecological modelling. Ecol. Indic. 2024, 166, 112370. [Google Scholar]
- Roberts, C.P.; Naugle, D.E.; Allred, B.W.; Donovan, V.M.; Fogarty, D.T.; Jones, M.O.; Maestas, J.D.; Olsen, A.C.; Twidwell, D. Next-generation technologies unlock new possibilities to track rangeland productivity and quantify multi-scale conservation outcomes. J. Environ. Manag. 2022, 324, 116359. [Google Scholar]
- Shoko, C.; Mutanga, O.; Dube, T. Progress in the remote sensing of C3 and C4 grass species aboveground biomass over time and space. ISPRS J. Photogramm. Remote Sens. 2016, 120, 13–24. [Google Scholar]
- Boer, M.; Stafford Smith, M.; Lepš, J. A plant functional approach to the prediction of changes in Australian rangeland vegetation under grazing and fire. J. Veg. Sci. 2003, 14, 333–344. [Google Scholar]
- Lambert, M.G.; Clark, D.A.; Grant, D.A.; Costall, D.A. Influence of fertiliser and grazing management on North Island moist hill country 2. Pasture botanical composition. N. Z. J. Agric. Res. 1986, 29, 1–10. [Google Scholar]
- López, I.F. Ecology of Pastoral Communities in a Heterogeneous Environment. Ph.D. Thesis, Massey University, Palmerston North, New Zealand, 2000. [Google Scholar]
- Wan, L.; Zhang, B.; Kemp, P.; Li, X. Modelling the abundance of three key plant species in New Zealand hill-pasture using a decision tree approach. Ecol. Model. 2009, 220, 1819–1825. [Google Scholar]
- Lambrechtsen, N.C. What Grass Is That? A Guide to Identification of Some Introduced Grasses in New Zealand by Vegetative Characters. Available online: https://natlib.govt.nz/records/21992996 (accessed on 15 November 2024).
- Hodgson, J.; Wilson, P.; Hunt, R.; Grime, J.; Thompson, K. Allocating CSR plant functional types: A soft approach to a hard problem. Oikos 1999, 85, 282–294. [Google Scholar] [CrossRef]
- Ministry of Primary Industries. Pioneering to Precision: Application of fertiliser in Hill Country. Available online: https://www.mpi.govt.nz/funding-rural-support/primary-growth-partnerships-pgps/completed-pgp-programmes/pioneering-to-precision-application-of-fertiliser-in-hill-country/ (accessed on 15 November 2024).
- Jackman, P.; Lee, T.; French, M.; Sasikumar, J.; O’Byrne, P.; Berry, D.; Lacey, A.; Ross, R. Predicting Key Grassland Characteristics from Hyperspectral Data. AgriEngineering 2021, 3, 313–322. [Google Scholar] [CrossRef]
- Rapinel, S.; Rossignol, N.; Hubert-Moy, L.; Bouzillé, J.B.; Bonis, A. Mapping grassland plant communities using a fuzzy approach to address floristic and spectral uncertainty. Appl. Veg. Sci. 2018, 21, 678–693. [Google Scholar]
- Seyler, F.; Chaplot, V.; Muller, F.; Cerri, C.E.P.; Bernoux, M.; Ballester, V.; Feller, C.; Cerri, C.C.C. Pasture mapping by classification of Landsat TM images. Analysis of the spectral behaviour of the pasture class in a real medium-scale environment: The case of the Piracicaba Catchment (12400 km2, Brazil). Int. J. Remote Sens. 2002, 23, 4985–5004. [Google Scholar] [CrossRef]
- Nicholas, P.K. Environmental and Management Factors as Determinants of Pasture Diversity and Production of North Island, New Zealand Hill Pasture Systems. Ph.D. Thesis, Pastures and Crops Group, Institute of Natural Resources, Massey University, Palmerston North, New Zealand, 1999. [Google Scholar]
- Kemp, P.; Lopez, I. Hill country pastures in the southern North Island of New Zealand: An overview. Hill Country Symposium. Grassland Research and Practice. Thom, R., Ed.; 2016, pp. 289–297. Available online: https://www.nzgajournal.org.nz/index.php/rps/article/view/3241 (accessed on 15 November 2024).
- Schmidtlein, S.; Tichý, L.; Feilhauer, H.; Faude, U. A brute-force approach to vegetation classification. J. Veg. Sci. 2010, 21, 1162–1171. [Google Scholar]
- Pullanagari, R.R.; Kereszturi, G.; Yule, I.J. Mapping of macro and micro nutrients of mixed pastures using airborne AisaFENIX hyperspectral imagery. ISPRS J. Photogramm. Remote Sens. 2016, 117, 1–10. [Google Scholar]
- Bacaro, G.; Baragatti, E.; Chiarucci, A. Using taxonomic data to assess and monitor biodiversity: Are the tribes still fighting? J. Environ. Monit. 2009, 11, 798–801. [Google Scholar] [PubMed]
- Gienko, G.; Govorov, M. Improving the efficiency of image interpretation using ground truth terrestrial photographs. In Remote Sensing Techniques and GIS Applications in Earth and Environmental Studies; Santra, A., Mitra, S.S., Eds.; IGI Global: Hershey, PA, USA, 2017; p. 39. [Google Scholar]
- Boardman, J.W.; Kruse, F.A.; Green, R.O. Mapping Target Signatures via Partial Unmixing of AVIRIS Data, N95-33737. 1995. Available online: https://ntrs.nasa.gov/api/citations/19950027316/downloads/19950027316.pdf (accessed on 15 November 2024).
- Green, A.A.; Berman, M.; Switzer, P.; Craig, M.D. A transformation for ordering multispectral data in terms of image quality with implications for noise removal. IEEE Trans. Geosci. Remote Sens. 1988, 26, 65–74. [Google Scholar]
- Demetriades-Shah, T.H.; Steven, M.D.; Clark, J.A. High resolution derivative spectra in remote sensing. Remote Sens. Environ. 1990, 33, 55–64. [Google Scholar]
- SPECIM. AsiaFENIX VNIR/SWIR Hyperspectral Imager User Manual Ver. 1.7; SPECIM, S.I.L.: Oulu, Finland, 2013. [Google Scholar]
- Ben-Hur, A.; Weston, J. A user’s guide to support vector machines. In Data Mining Techniques for the Life Sciences; Carugo, O., Eisenhaber, F., Eds.; Humana: Totowa, NJ, USA, 2010; pp. 223–239. [Google Scholar] [CrossRef]
- Hsu, C.-W.; Chang, C.-C.; Lin, C.-J. A Practical Guide to Support Vector Classification; National Taiwan University. 2003. Available online: https://www.datascienceassn.org/sites/default/files/Practical%20Guide%20to%20Support%20Vector%20Classification.pdf (accessed on 15 November 2024).
- Foody, G.M.; Arora, M. An evaluation of some factors affecting the accuracy of classification by an artificial neural network. Int. J. Remote Sens. 1997, 18, 799–810. [Google Scholar]
- Foody, G.M.; Mathur, A. Toward intelligent training of supervised image classifications: Directing training data acquisition for SVM classification. Remote Sens. Environ. 2004, 93, 107–117. [Google Scholar]
- Foody, G.M.; Mathur, A. The use of small training sets containing mixed pixels for accurate hard image classification: Training on mixed spectral responses for classification by a SVM. Remote Sens. Environ. 2006, 103, 179–189. [Google Scholar]
- Foody, G.M.; Mathur, A.; Sanchez-Hernandez, C.; Boyd, D.S. Training set size requirements for the classification of a specific class. Remote Sens. Environ. 2006, 104, 1–14. [Google Scholar]
- Stehman, S.V. Sampling designs for accuracy assessment of land cover. Int. J. Remote Sens. 2009, 30, 5243–5272. [Google Scholar]
- Reinke, K.; Jones, S. Integrating vegetation field surveys with remotely sensed data. Ecol. Manag. Restor. 2006, 7, S18–S23. [Google Scholar]
- Stehman, S.; Wickham, J.; Smith, J.; Yang, L. Thematic accuracy of the 1992 National Land-Cover Data for the eastern United States: Statistical methodology and regional results. Remote Sens. Environ. 2003, 86, 500–516. [Google Scholar]
- Asner, G.P.; Jones, M.O.; Martin, R.E.; Knapp, D.E.; Hughes, R.F. Remote sensing of native and invasive species in Hawaiian forests. Remote Sens. Environ. 2008, 112, 1912–1926. [Google Scholar]
- Monserud, R.A.; Leemans, R. Comparing global vegetation maps with the Kappa statistic. Ecol. Model. 1992, 62, 275–293. [Google Scholar]
- Foody, G.M. Harshness in image classification accuracy assessment. Int. J. Remote Sens. 2008, 29, 3137–3158. [Google Scholar]
- Matthew, C.; Tillman, R.W.; Hedley, M.J.; Thompson, M.C. Observations on the relationship betweensoil fertility, botanical composition and pasture growth rate; for a north island lowland pasture. Proc. N. Z. Grassl. Assoc. 1988, 49, 4. [Google Scholar]
- Josh, E.; Caughlin, T.T.; Hamid, D.; Nancy, F.G. Applied soft classes and fuzzy confusion in a patchwork semi-arid ecosystem: Stitching together classification techniques to preserve ecologically-meaningful information. Remote Sens. Environ. 2023, 300, 113853. [Google Scholar]
- Anna, K.S.; Anna, K.S.; Martin, S.; Martin, S.; Anita, C.R.; Anita, C.R.; Mathias, K.; Mathias, K.; Rudolf, H.; Rudolf, H.; et al. How to predict plant functional types using imaging spectroscopy: Linking vegetation community traits, plant functional types and spectral response. Methods Ecol. Evol. 2017, 8, 86–95. [Google Scholar]
- Suvarna, P.; Survarna, P.; Anne, V.; Anne, V.; Irina, T.; Irina, V.T.; Christiaan van der, T.; Christiaan van der, T.; David, M.; David, M.; et al. Characterization of a Highly Biodiverse Floodplain Meadow Using Hyperspectral Remote Sensing within a Plant Functional Trait Framework. Remote Sens. 2016, 8, 112. [Google Scholar] [CrossRef]
- Foody, G.M. Assessing the accuracy of land cover change with imperfect ground reference data. Remote Sens. Environ. 2010, 114, 2271–2285. [Google Scholar]
- Fernández-Habas, J.; Carriere Cañada, M.; García Moreno, A.M.; Leal-Murillo, J.R.; González-Dugo, M.P.; Abellanas Oar, B.; Gómez-Giráldez, P.J.; Fernández-Rebollo, P. Estimating pasture quality of Mediterranean grasslands using hyperspectral narrow bands from field spectroscopy by Random Forest and PLS regressions. Comput. Electron. Agric. 2022, 192, 106614. [Google Scholar]
- Oldeland, J.; Dorigo, W.; Lieckfeld, L.; Lucieer, A.; Jürgens, N. Combining vegetation indices, constrained ordination and fuzzy classification for mapping semi-natural vegetation units from hyperspectral imagery. Remote Sens. Environ. 2010, 114, 1155–1166. [Google Scholar]
- Brogaard, S.; Ólafsdóttir, R. Ground-truths or Ground-lies?: Environmental sampling for remote sensing application exemplified by vegetation cover data. In Lund Electronic Reports in Physical Geography; Department of Physical Geography, Lund University: Lund, Sweden, 1997; Volume 1. [Google Scholar]
- During, C.; Mountier, N. Sources of error in advisory soil tests: III. Spatial variance. N. Z. J. Agric. Res. 1967, 10, 134–138. [Google Scholar]
- Morton, J.; Baird, D.; Manning, M. A soil sampling protocol to minimise the spatial variability in soil test values in New Zealand hill country. N. Z. J. Agric. Res. 2000, 43, 367–375. [Google Scholar]
- Murray, R.I. Variable Rate Application Technology in the New Zealand Aerial Topdressing Industry. Ph.D. Thesis, Massey University, Palmerston North, New Zealand, 2007. [Google Scholar]
- Qian, S.E. Hyperspectral Satellites, Evolution, and Development History. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7032–7056. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inclusion in Classification Training Group | Point ID | Browntop % | Ryegrass % | Clover % | Dead Material % | Other Pasture % | Offset Direction | Offset Distance (m) | User Defined Class |
|---|---|---|---|---|---|---|---|---|---|
| V1 | 80 | 0 | 10 | 1 | 9 | 65° | 3.0 | LFT | |
| V2 | 77.5 | T | 2.5 | 10 | 10 | 130° | 3.9 | LFT | |
| V3 | 65 | 5 | 20 | T | 10 | 110° | 8.4 | LFT | |
| Y | V4 | 85 | 0 | T | 5 | 10 | 110° | 8.4 | LFT |
| Y | V5 | T | 70 | 25 | 0 | 5 | 110° | 6.5 | HFR |
| Y | V6 | 50 | 5 | 0 | 2 | 43 | 135° | 3.1 | LFT |
| Y | V7 | 90 | 0 | T | 5 | 5 | 130° | 4.0 | LFT |
| V8 | 35 | 35 | 20 | 5 | 5 | 270° | 1.0 | HFR * | |
| Y | V9 | 80 | 0 | 15 | 5 | 0 | 60° | 0.8 | LFT |
| V10 | 75 | 5 | 10 | 5 | 5 | 110° | 5.9 | LFT | |
| V11 | 20 | 55 | 20 | 2 | 3 | 50° | 3.6 | HFR | |
| V12 | 20 | 40 | 20 | 2 | 18 | 80° | 4.8 | HFR | |
| V13 | 25 | 15 | 25 | T | 35 | 105° | 11.1 | LFT * | |
| V14 | 25 | 0 | 60 | T | 35 | 295° | 3.5 | L | |
| V15 | 10 | 10 | 50 | T | 30 | 110° | 6.7 | L | |
| Y | V16 | 10 | 5 | 60 | T | 25 | 120° | 1.6 | L |
| V17 | 20 | 0 | 50 | T | 30 | 90° | 4.3 | L | |
| Y | V18 | 10 | 5 | 60 | T | 25 | 105° | 2.9 | L |
| Y | V19 | 40 | 5 | 10 | 2 | 33 | 130° | 5.5 | LFT |
| Y | V20 | 58 | 5 | 25 | 2 | 10 | 140° | 4.1 | LFT |
| V21 | 20 | 20 | 20 | 2 | 38 | 135° | 5.7 | LFT * | |
| Y | V22 | 0 | 99 | T | 0 | 1 | 205° | 2.3 | HFR |
| V23 | 5 | 5 | 50 | T | 40 | 90° | 3.5 | L | |
| Y | V25 | 3 | 5 | 65 | 2 | 25 | 90° | 2.9 | L |
| V28 | 10 | 80 | 10 | 0 | 0 | 110° | 7.0 | HFR | |
| Y | V29 | 0 | 50 | 50 | T | 0 | 110° | 3.7 | HFR * |
| V30 | 0 | 80 | 15 | 0 | 5 | 100° | 0.6 | HFR | |
| V31 | 5 | 15 | 5 | T | 75 | 80° | 1.7 | LFT * | |
| V32 | 10 | 0 | 0 | T | 90 | 110° | 6.7 | LFT | |
| Y | V33 | 0 | 75 | 25 | T | 0.1 | 130° | 7.1 | HFR |
| Y | V34 | 0 | 0 | 100 | 0 | 0 | 110° | 5.8 | L |
| Y | V35 | 0 | 0 | 95 | 0 | 5 | 90° | 2.8 | L |
| Y | V36 | 0 | 75 | 5 | 1 | 19 | 105° | 5.6 | HFR |
| Y | V37 | 0 | 30 | 40 | T | 30 | 50° | 3.8 | HFR * |
| Y | V38 | 50 | 30 | 10 | 1 | 9 | 310° | 1.0 | LFT |
| V39 | 40 | 40 | 5 | 1 | 14 | 110° | 3.7 | LFT * | |
| Y | V40 | 40 | T | T | 15 | 45 | 350° | 2.3 | LFT |
| V42 | 15 | 20 | 40 | 1 | 24 | 100° | 5.6 | HFR | |
| Y | V43 | 85 | 5 | 0 | 5 | 5 | 70° | 6.7 | LFT |
| Y | V44 | 10 | 50 | 5 | 5 | 30 | 120° | 5.8 | HFR |
| Y | V46 | 10 | 85 | 0.1 | T | 5 | 140° | 4.0 | HFR |
| V47 | 0 | 60 | 35 | 0 | 5 | 130° | 4.8 | HFR | |
| Y | V48 | 0 | 90 | 5 | 0 | 5 | 130° | 4.9 | HFR |
| V49 | 5 | 39 | 40 | 1 | 15 | 110° | 6.0 | HFR | |
| V50 | 5 | 40 | 40 | T | 15 | 110° | 6.5 | HFR * | |
| V52 | 10 | 30 | 2 | 2 | 56 | 135° | 3.9 | LFT * | |
| vt2 | 60 | 0 | 5 | 3 | 32 | 140° | 2.4 | LFT | |
| Y | vt27 | T | 70 | 30 | T | 0 | 130° | 3.8 | HFR |
| vt3 | 20 | 10 | 10 | 60 | 0 | 45° | 4.1 | LFT |
| Data Transformation | Tarpaulin Sites | Paddocks | |
|---|---|---|---|
| 1st Derivative | OA | 57.44% | 88.75% |
| kappa | 24.48% | 82.72% | |
| MNF | OA | 56.02% | 86.03% |
| Kappa | 27.28% | 78.11% | |
| 1st Derivative | OA | 56.02% | 84.46% |
| (No SWIR) | Kappa | 14.66% | 75.65% |
| Class | Commission | Omission | Commission | Omission |
|---|---|---|---|---|
| (%) | (%) | (Pixels) | (Pixels) | |
| LFT | 30.49 | 28.75 | 25/82 | 23/80 |
| HFR | 59.26 | 40.54 | 32/54 | 15/37 |
| Legume | 60 | 91.67 | 3/5 | 22/24 |
| Tarpaulin Sites | Paddock Sites | |||||
|---|---|---|---|---|---|---|
| 1st Der. | MNF | 1st Der. (No SWIR) | 1st Der | MNF | 1st Der. (No SWIR) | |
| LFT | 71.25 | 62.5 | 80 | 89.81 | 64.63 | 77.7 |
| HFR | 59.46 | 67.57 | 29.73 | 84.09 | 89.06 | 88.54 |
| Legumes | 8.33 | 16.67 | 16.67 | 94.99 | 99.81 | 83.71 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cushnahan, T.A.; Grafton, M.C.E.; Pearson, D.; Ramilan, T. Hyperspectral Data Can Classify Plant Functional Groups Within New Zealand Hill Farm Pasture. Remote Sens. 2025, 17, 1120. https://doi.org/10.3390/rs17071120
Cushnahan TA, Grafton MCE, Pearson D, Ramilan T. Hyperspectral Data Can Classify Plant Functional Groups Within New Zealand Hill Farm Pasture. Remote Sensing. 2025; 17(7):1120. https://doi.org/10.3390/rs17071120
Chicago/Turabian StyleCushnahan, Thomas A., Miles C. E. Grafton, Diane Pearson, and Thiagarajah Ramilan. 2025. "Hyperspectral Data Can Classify Plant Functional Groups Within New Zealand Hill Farm Pasture" Remote Sensing 17, no. 7: 1120. https://doi.org/10.3390/rs17071120
APA StyleCushnahan, T. A., Grafton, M. C. E., Pearson, D., & Ramilan, T. (2025). Hyperspectral Data Can Classify Plant Functional Groups Within New Zealand Hill Farm Pasture. Remote Sensing, 17(7), 1120. https://doi.org/10.3390/rs17071120