


Detecting Lunar Subsurface Water Ice Using FMCW Ground Penetrating Radar: Numerical Analysis with Realistic Permittivity Variations



Abstract
1. Introduction
2. Materials and Methods
2.1. Assumptions of Subsurface Structure on the Moon
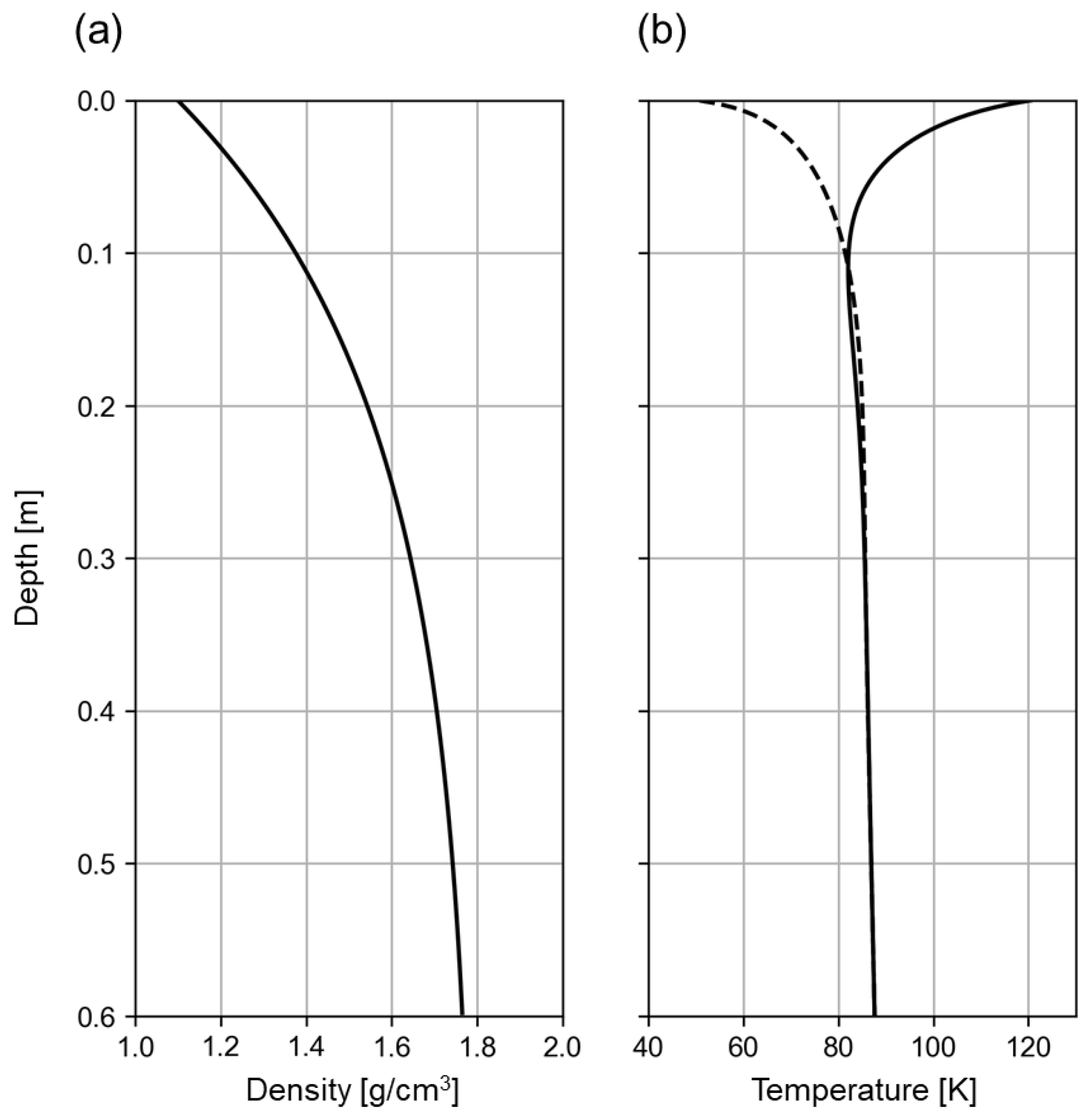
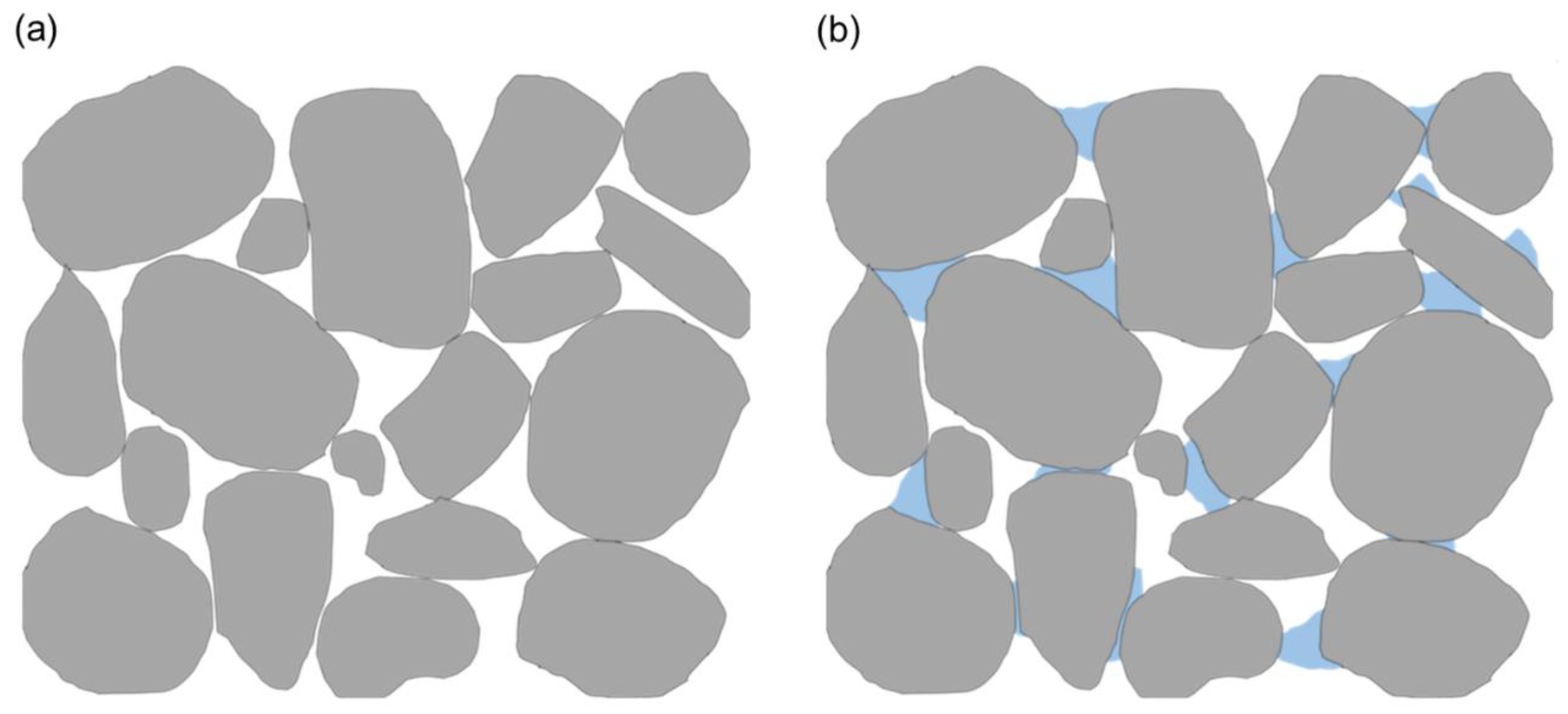
2.1.1. Possible Conditions of Regolith and Water Ice
2.1.2. Electromagnetic Properties of Subsurface Materials
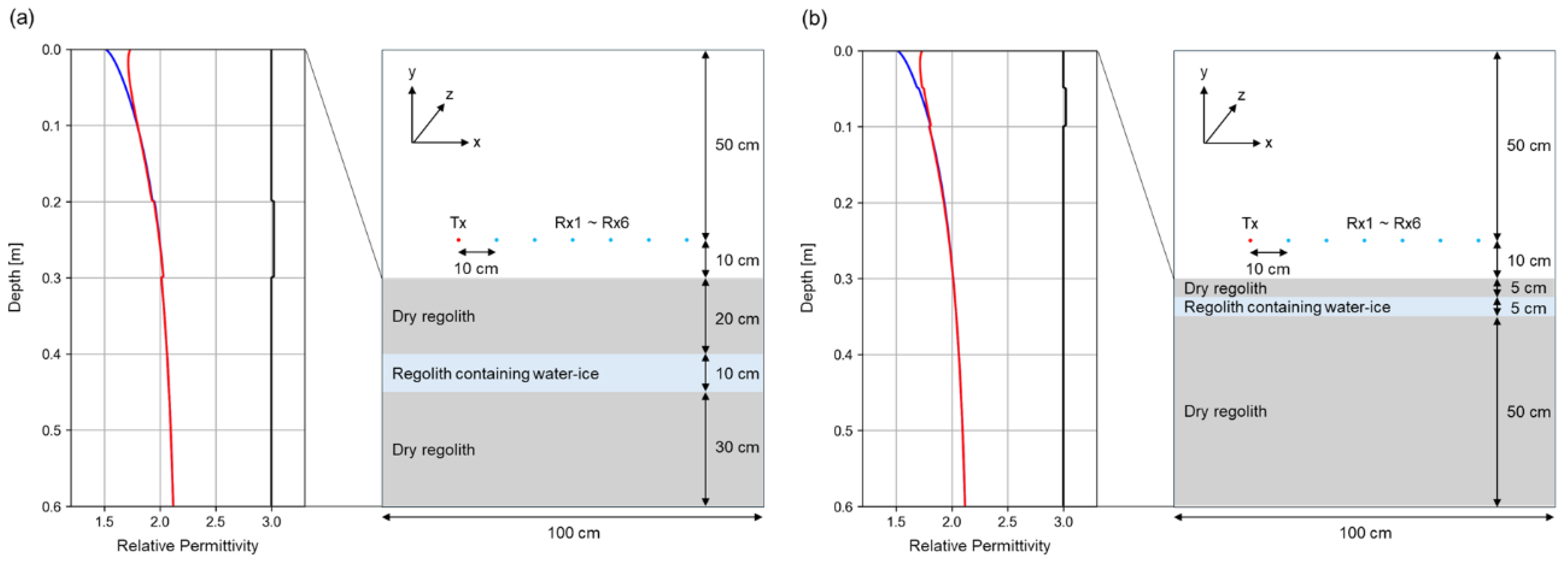
2.2. Simulation Setup and Geometry
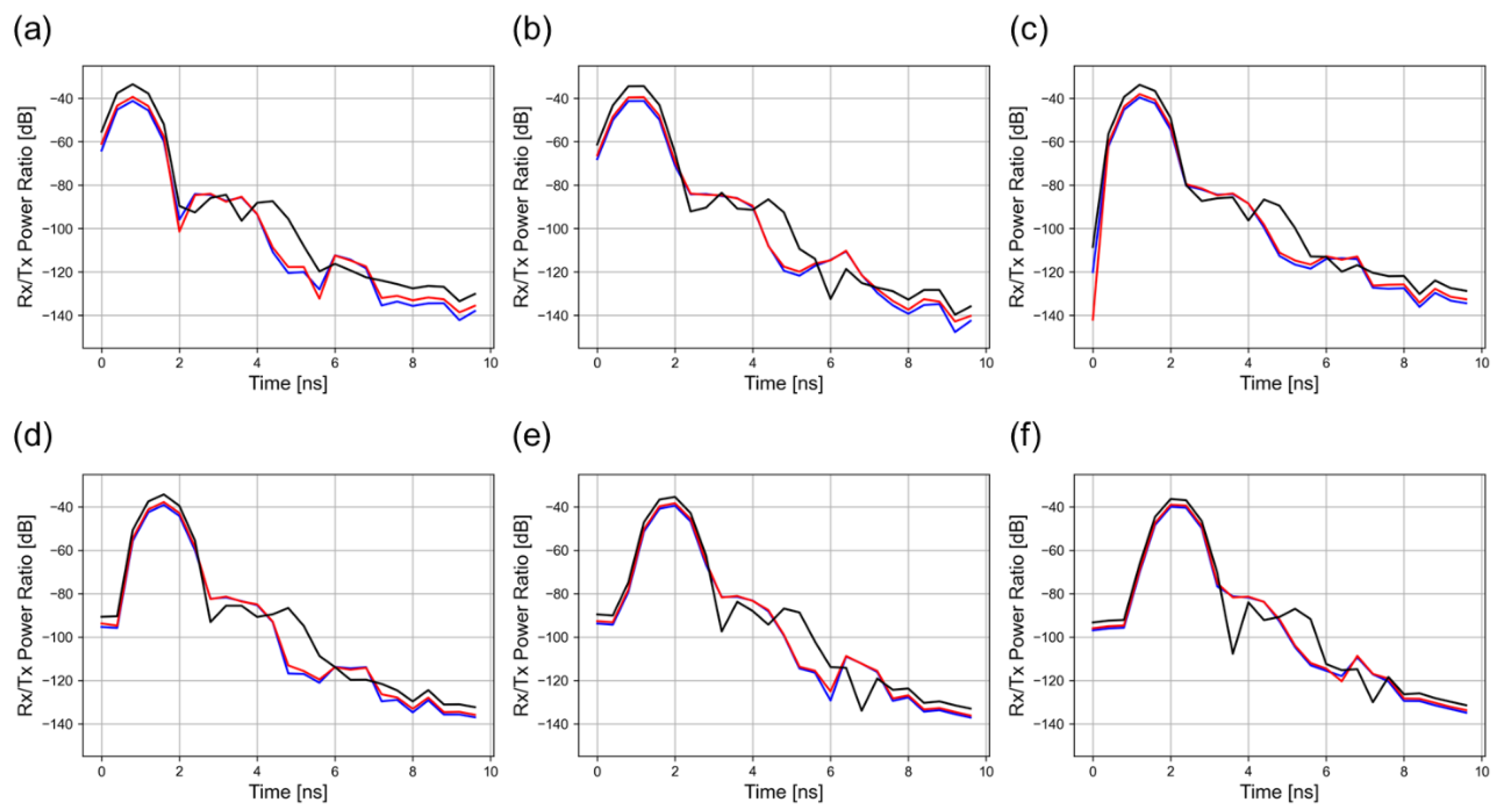
2.3. Signal Processing
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pieters, C.M.; Goswami, J.N.; Clark, R.N.; Annadurai, M.; Boardman, J.; Buratti, B.; Combe, J.-P.; Dyar, M.D.; Green, R.; Head, J.W.; et al. Character and spatial distribution of OH/H2O on the surface of the Moon seen by M3 on Chandrayaan-1. Science 2009, 326, 568–572. [Google Scholar] [CrossRef] [PubMed]
- Miller, R.S.; Nerurkar, G.; Lawrence, D.J. Enhanced hydrogen at the lunar poles: New insights from the detection of epithermal and fast neutron signatures. J. Geophys. Res. Planets 2012, 117, E11007. [Google Scholar] [CrossRef]
- Sanin, A.B.; Mitrofanov, I.G.; Litvak, M.L.; Bakhtin, B.N.; Bodnarik, J.G.; Boynton, W.V.; Chin, G.; Evans, L.; Harshman, K.; Fedosov, F.; et al. Hydrogen distribution in the lunar polar regions. Icarus 2017, 283, 20–30. [Google Scholar] [CrossRef]
- Li, S.; Lucey, P.G.; Milliken, R.E.; Hayne, P.O.; Fisher, E.; Williams, J.P.; Hurley, D.M.; Elphic, R.C. Direct evidence of surface exposed water ice in the lunar polar regions. Proc. Natl. Acad. Sci. USA 2018, 115, 8907–8912. [Google Scholar] [CrossRef]
- Reiss, P.; Warren, T.; Sefton-Nash, E.; Trautner, R. Dynamics of subsurface migration of water on the Moon. J. Geophys. Res. Planets 2021, 126, e2020JE006742. [Google Scholar] [CrossRef]
- Schorghofer, N. Gradual sequestration of water at lunar polar conditions due to temperature cycles. Astrophys. J. Lett. 2022, 927, L34. [Google Scholar] [CrossRef]
- Lai, J.; Xu, Y.; Bugiolacchi, R.; Meng, X.; Xiao, L.; Xie, M.; Liu, B.; Di, K.; Zhang, X.; Zhou, B.; et al. First look by the Yutu-2 rover at the deep sub-surface structure at the lunar farside. Nat. Commun. 2020, 11, 3426. [Google Scholar] [CrossRef] [PubMed]
- Su, Y.; Fang, G.Y.; Feng, J.Q.; Xing, S.G.; Ji, Y.C.; Zhou, B.; Gao, Y.-Z.; Li, H.; Dai, S.; Xiao, Y.; et al. Data processing and initial results of Chang’e-3 lunar penetrating radar. Res. Astron. Astrophys. 2014, 14, 1623–1632. [Google Scholar] [CrossRef]
- Prajapati, V.; Kumar, B.S.; Kumar, P.; Agrawal, R.A.; Rao, C.V.N. Design and Implementation of Equivalent Time Sampling Scheme on FPGA for Impulse GPR. In Proceedings of the 2024 IEEE Space, Aerospace and Defence Conference (SPACE), Bangalore, India, 22–23 July 2024; pp. 207–210. [Google Scholar] [CrossRef]
- Hamran, S.E.; Paige, D.A.; Amundsen, H.E.; Berger, T.; Brovoll, S.; Carter, L.; Damsgård, L.; Dypvik, H.; Eide, J.; Eide, S.; et al. Radar imager for Mars’ subsurface experiment—RIMFAX. Space Sci. Rev. 2020, 216, 128. [Google Scholar] [CrossRef]
- Ciarletti, V.; Corbel, C.; Plettemeier, D.; Cais, P.; Clifford, S.M.; Hamran, S.E. WISDOM GPR designed for shallow and high-resolution sounding of the Martian subsurface. Proc. IEEE 2011, 99, 824–836. [Google Scholar] [CrossRef]
- Kobayashi, M.; Miyamoto, H.; Pál, B.D.; Niihara, T.; Takemura, T. Laboratory measurements show temperature-dependent permittivity of lunar regolith simulants. Earth Planets Space 2023, 75, 8. [Google Scholar] [CrossRef]
- Dai, S.; Su, Y.; Xiao, Y.; Feng, J.Q.; Xing, S.G.; Ding, C.Y. Echo simulation of lunar penetrating radar: Based on a model of inhomogeneous multilayer lunar regolith structure. Res. Astron. Astrophys. 2014, 14, 1642–1653. [Google Scholar] [CrossRef]
- Xiao, Y.; Su, Y.; Dai, S.; Feng, J.; Xing, S.; Ding, C.; Li, C. Ground experiments of Chang’e-5 lunar regolith penetrating radar. Adv. Space Res. 2019, 63, 3404–3419. [Google Scholar] [CrossRef]
- Putrevu, P.; Pandey, D.K.; Chakraborty, T. GPR Sensitivity Analysis for Detection of Subsurface Layers in Lunar Scenario. In Proceedings of the 2021 IEEE MTT-S International Microwave and RF Conference (IMARC), Kanpur, India, 17–19 December 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Fa, W. Modeling and simulation for ground penetrating radar study of the subsurface structure of the moon. In Proceedings of the 2012 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012; pp. 922–926. [Google Scholar] [CrossRef]
- Fa, W. Simulation for ground penetrating radar (GPR) study of the subsurface structure of the Moon. J. Appl. Geophys. 2013, 99, 98–108. [Google Scholar] [CrossRef]
- Zhang, L.; Zeng, Z.F.; Li, J.; Lin, J.Y. Study on regolith modeling and lunar penetrating radar simulation. In Proceedings of the 2016 16th International Conference on Ground Penetrating Radar (GPR), Hong Kong, China, 13–16 June 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, L.; Zeng, Z.; Li, J.; Lin, J.; Hu, Y.; Wang, X.; Sun, X. Simulation of the lunar regolith and lunar-penetrating radar data processing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 655–663. [Google Scholar] [CrossRef]
- Lv, W.; Li, C.; Song, H.; Zhang, J.; Lin, Y. Comparative analysis of reflection characteristics of lunar penetrating radar data using numerical simulations. Icarus 2020, 350, 113896. [Google Scholar] [CrossRef]
- Heiken, G.; Vaniman, D.; French, B.M. Lunar Sourcebook: A User’s Guide to the Moon; Cambridge University Press: Cambridge, UK, 1991. [Google Scholar]
- Lemelin, M.; Lucey, P.G.; Camon, A. Compositional maps of the lunar polar regions derived from the Kaguya spectral profiler and the lunar orbiter laser altimeter data. Planet. Sci. J. 2022, 3, 63. [Google Scholar] [CrossRef]
- Yamamoto, S.; Nakamura, R.; Matsunaga, T.; Ogawa, Y.; Ishihara, Y.; Morota, T.; Hirata, N.; Ohtake, M.; Hiroi, T.; Yokota, Y.; et al. Massive layer of pure anorthosite on the Moon. Geophys. Res. Lett. 2012, 39, L13201. [Google Scholar] [CrossRef]
- Hayne, P.O.; Bandfield, J.L.; Siegler, M.A.; Vasavada, A.R.; Ghent, R.R.; Williams, J.P.; Greenhagen, B.T.; Aharonson, O.; Elder, C.M.; Lucey, P.G.; et al. Global regolith thermophysical properties of the Moon from the Diviner Lunar Radiometer Experiment. J. Geophys. Res. Planets 2017, 122, 2371–2400. [Google Scholar] [CrossRef]
- Feng, J.; Siegler, M.A. Reconciling the infrared and microwave observations of the lunar south pole: A study on subsurface temperature and regolith density. J. Geophys. Res. Planets 2021, 126, e2020JE006623. [Google Scholar] [CrossRef]
- Martinez, A.; Siegler, M.A. A global thermal conductivity model for lunar regolith at low temperatures. J. Geophys. Res. Planets 2021, 126, e2021JE006829. [Google Scholar] [CrossRef]
- Carrier, W.D., III; Olhoeft, G.R.; Mendell, W. Physical properties of the lunar surface. In Lunar Sourcebook: A User’s Guide to the Moon; Heiken, G., Vaniman, D., French, B.M., Eds.; Cambridge University Press: Cambridge, UK, 1991; pp. 475–594. [Google Scholar]
- Dong, Z.; Fang, G.; Ji, Y.; Gao, Y.; Wu, C.; Zhang, X. Parameters and structure of lunar regolith in Chang’E-3 landing area from lunar penetrating radar (LPR) data. Icarus 2017, 282, 40–46. [Google Scholar] [CrossRef]
- Looyenga, H. Dielectric constants of heterogeneous mixtures. Physica 1965, 31, 401–406. [Google Scholar] [CrossRef]
- Matsuoka, T.; Fujita, S.; Mae, S. Effect of temperature on dielectric properties of ice in the range 5–39 GHz. J. Appl. Phys. 1996, 80, 5884–5890. [Google Scholar] [CrossRef]
- Fujita, S.; Matsuoka, T.; Ishida, T.; Matsuoka, K.; Mae, S. A summary of the complex dielectric permittivity of ice in the megahertz range and its applications for radar sounding of polar ice sheets. In Physics of Ice Core Records; Hondoh, T., Ed.; Hokkaido University Press: Sapporo, Japan, 2000; pp. 185–212. [Google Scholar]
- Ghormley, J.A.; Hochanadel, C.J. Amorphous ice: Density and reflectivity. Science 1971, 171, 62–64. [Google Scholar] [CrossRef] [PubMed]
- Yee, K. Numerical solution of initial boundary value problems involving Maxwell’s equations in isotropic media. IEEE Trans. Antennas Propag. 1966, 14, 302–307. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A.; Giannakis, I. gprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar. Comput. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef]
- Sun, C.; Miyamoto, H.; Kobayashi, M. Temperature Dependence of the Dielectric Constant on the Lunar Surface Based on Mini-RF and Diviner Observations. Geosciences 2024, 14, 101. [Google Scholar] [CrossRef]
- Su, Y.; Wang, R.; Deng, X.; Zhang, Z.; Zhou, J.; Xiao, Z.; Ding, C.; Li, Y.; Dai, S.; Ren, X.; et al. Hyperfine structure of regolith unveiled by Chang’E-5 lunar regolith penetrating radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Feng, J.; Su, Y.; Li, C.; Dai, S.; Xing, S.; Xiao, Y. An imaging method for Chang’e−5 Lunar Regolith Penetrating Radar. Planet. Space Sci. 2019, 167, 9–16. [Google Scholar] [CrossRef]
- Hoshino, T.; Wakabayashi, S.; Ohtake, M.; Karouji, Y.; Hayashi, T.; Morimoto, H.; Shiraishi, H.; Shimada, T.; Hashimoto, T.; Inoue, H.; et al. Lunar polar exploration mission for water prospection—JAXA’s current status of joint study with ISRO. Acta Astronaut. 2020, 176, 52–58. [Google Scholar] [CrossRef]
- Kawashima, O.; Morota, T.; Ohtake, M.; Kasahara, S. Size-frequency measurements of meter-sized craters and boulders in the lunar polar regions for landing-site selections of future lunar polar missions. Icarus 2022, 378, 114938. [Google Scholar] [CrossRef]
- Talkington, C.L.; Hirabayashi, M.; Montalvo, P.E.; Deutsch, A.N.; Fassett, C.I.; Siegler, M.A.; Shepherd, S.L.; King, D.T. Survival of ancient lunar water affected by topographic degradation of old, large complex craters. Geophys. Res. Lett. 2022, 49, e2022GL099241. [Google Scholar] [CrossRef]
- Krasilnikov, A.S.; Krasilnikov, S.S.; Ivanov, M.A.; Head, J.W. Estimation of ejecta thickness from impact craters in the South polar region of the Moon. Sol. Syst. Res. 2023, 57, 122–132. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Setting |
|---|---|
| Total simulation space | 1.0 × 1.2 × 1.0 m3 |
| Spatial discretization ∆x, ∆y, and ∆z | 2 mm |
| Temporal discretization ∆t | 3.85167 ps 1 |
| Absorbing boundary conditions | Perfectly matched layer (PML) 2 |
| Antenna | Hertzian dipole antenna |
| Antenna offset from the ground | 10 cm |
| Offsets between Tx and Rxs | 10–60 cm (10 cm interval) |
| Frequency band | 0.5–3.0 GHz 3 |
| Pulse duration | 50 µs |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takekura, S.; Miyamoto, H.; Kobayashi, M. Detecting Lunar Subsurface Water Ice Using FMCW Ground Penetrating Radar: Numerical Analysis with Realistic Permittivity Variations. Remote Sens. 2025, 17, 1050. https://doi.org/10.3390/rs17061050
Takekura S, Miyamoto H, Kobayashi M. Detecting Lunar Subsurface Water Ice Using FMCW Ground Penetrating Radar: Numerical Analysis with Realistic Permittivity Variations. Remote Sensing. 2025; 17(6):1050. https://doi.org/10.3390/rs17061050
Chicago/Turabian StyleTakekura, Shunya, Hideaki Miyamoto, and Makito Kobayashi. 2025. "Detecting Lunar Subsurface Water Ice Using FMCW Ground Penetrating Radar: Numerical Analysis with Realistic Permittivity Variations" Remote Sensing 17, no. 6: 1050. https://doi.org/10.3390/rs17061050
APA StyleTakekura, S., Miyamoto, H., & Kobayashi, M. (2025). Detecting Lunar Subsurface Water Ice Using FMCW Ground Penetrating Radar: Numerical Analysis with Realistic Permittivity Variations. Remote Sensing, 17(6), 1050. https://doi.org/10.3390/rs17061050