1. Introduction
Real-time kinematic (RTK) positioning technology has been developed to address both errors in the global navigation satellite system (GNSS) positioning process, such as those caused by ionospheric and tropospheric delays, as well as atomic clock synchronization issues [
1,
2]. This technology significantly enhances positioning accuracy by processing differential carrier phase observations between a reference station and a moving station in real time [
3]. For unmanned aerial vehicles (UAVs), RTK positioning technology is particularly critical for applications requiring high precision, such as aerial mapping, precision agriculture, and autonomous navigation. However, the GNSS signals received by RTK systems are extremely weak, typically below −130 dBm, making them highly susceptible to interference [
4]. This underscores the importance of robust anti-interference solutions to ensure reliable and precise positioning for UAV operations in challenging conditions.
In most cases, the noise power in GNSS signals is higher than the desired GNSS signal but lower than interference levels, posing a significant challenge for UAV operations that rely on precise positioning. Additionally, the direction of incoming satellite signals is often unknown to the GNSS receiver, further complicating the task of signal acquisition and interference mitigation [
5]. Therefore, the primary challenge for GNSS receiver anti-interference technology lies in suppressing interference signals while ensuring that the gain of the useful GNSS signal is not compromised. To address this optimization problem, researchers have proposed the power inversion (PI) criterion. This criterion requires minimizing the output signal power after processing by an anti-interference algorithm, effectively filtering out interference while preserving the integrity of the useful GNSS signals [
6]. Due to its straightforward implementation and proven effectiveness in interference suppression, the PI criterion has become the most widely adopted approach in UAV GNSS systems [
7]. Other advanced criteria, such as the minimum mean square error (MMSE) criterion, maximum signal-to-interference plus noise ratio (MSINR) criterion, and minimum variance distortionless response (MVDR) criterion, have also been developed to enhance antenna anti-interference capabilities [
8,
9,
10]. A comparative analysis of these anti-interference criteria is presented in
Table 1, highlighting their respective advantages and suitability for UAV applications in challenging environments.
To address interference challenges in UAV operations, space array processing (SAP) and space-time array processing (STAP) have been developed based on established anti-interference criteria [
11,
12]. These techniques utilize antenna arrays to generate adaptive weights through anti-interference algorithms, which are applied to incoming signals to reduce interference power. However, the inherent characteristics of phased-array antennas and the weighting effects of adaptive anti-interference algorithms can compromise signal integrity, introducing measurement biases that are particularly critical for high-precision positioning systems like RTK systems. These biases arise from factors such as mutual coupling between array elements [
13], amplitude and phase deviations among array units [
14], inconsistencies in array RF channels [
15], and phase biases directly or indirectly introduced by anti-interference algorithms [
16]. Unlike common errors, these biases cannot be easily eliminated, posing significant challenges for UAV applications requiring centimeter-level accuracy, such as precision agriculture, aerial surveying, and autonomous navigation. Addressing these biases is essential to ensure reliable and precise RTK positioning in interference-prone environments.
To compensate for the deviations introduced by the anti-interference of array antennas, Kim U. S. adjusted the frequency characteristics of the signal by adding a finite impulse response (FIR) filter after each antenna element and suppressed measurement errors in the antenna array by trying to adjust the filter coefficients [
17]. However, since the complexity of actual engineering implementation was not taken into account and real positioning performance tests needed to be conducted, the measurement bias system needed to be improved. Andrew O’Brien reduced the measurement bias introduced by the entire antenna array system by constraining the weights of the space-time array [
18]. The simulation results indicate that this method has a good compensation effect on the carrier phase bias and meets the requirements of high-precision applications. However, the computational load is too large, and the cost in terms of engineering implementation remains too high. Jia Qiongqiong improved carrier phase estimation accuracy based on reference signal steering vector estimation combined with PI and MVDR algorithms [
19]. The simulation experiments showed that a carrier phase bias of within 5 mm could be achieved. However, the hardware implementation was highly complex, significantly altered the existing receiver structure, and lacked real-time usability. Wang Yaoding proposed a distortion-less pseudo-code tracking space-time PI algorithm by keeping the coefficients of the temporal taps as real values and imposing constraints on the weights of the antenna array [
20]. In addition, this algorithm was only applicable to pseudo-code ranging systems and was not applicable to carrier phase measurements. Li Song adopted a robust phase compensation technique to reduce the phase distortion. The proposed technique operates in real time and causes no processing delay while requiring only a minor modification to existing GNSS receivers [
21]. Moreover, the method reduces the computational complexity. Nevertheless, the estimate uses an observation sequence with a window size of L, which will influence the estimation accuracy and the dynamic performance. In addition, the estimated phase bias is limited by the phase lock loop discriminator. If the phase bias is beyond the detection range of the discriminator, the phase bias cannot be accurately estimated [
22]. Wu adopted blind adaptive beamforming based on direction lock loop. These algorithms can achieve similar effects to the MVDR algorithm by using the direction of arrival (DOA) estimation method without prior information. However, their complex hardware implementation restricts their application [
23]. In conclusion, those methods require complex hardware implementation, which limits their application in low-cost general array receivers. The comparison of phase bias compensation algorithms is shown in
Table 2.
The paper proposes an adaptive zeroing algorithm to compensate for the phase bias caused by the anti-interference algorithm of RTK. The algorithm consists of two steps. First, we present a rough bias compensation method based on array weighted-coefficient conjugation. Second, we propose fine bias compensation for the anti-interference output signal. The rough phase compensation is designed based on the PI algorithm, thus eliminating the need to obtain the satellite signal direction and reducing algorithm complexity compared to traditional phase bias compensation algorithms. The second step processes the anti-interference output signal, which has low hardware complexity. Therefore, the proposed algorithm does not require the direction of the incident signal and has low hardware complexity.
The structure of paper is as follows. In
Section 2, the mathematical model of antenna array processing and RTK positioning are introduced. In
Section 3, the characteristics of carrier phase bias are analyzed. Moreover, we introduce the algorithm. In
Section 4, we simulate the anti-interference performance and discuss the phase bias compensation results.
2. Materials and Methods
This section begins by establishing the signal model for antenna array anti-interference algorithms. Following this, we analyze the impact of anti-interference effects on RTK positioning accuracy, a key consideration for UAV operations in environments prone to electromagnetic interference. In
Section 2.4 and
Section 2.5, we proposes the phase compensation method. First, we introduce the error analysis of the anti-interference algorithm in RTK positioning. Then, a bias compensation algorithm based on array weighted-coefficient conjugation for rough phase bias compensation. Finally, we propose a compensation algorithm based on the array anti-interference output signal for fine phase bias compensation.
2.1. Signal Model
The antenna array is considered as comprising M ideal omnidirectional elements, ignoring the mutual coupling effects between elements [
24,
25]. Moreover, the antenna unit and radio frequency (RF) channel also meet the amplitude and phase consistency. Since the distance from the satellite signal to the ground is far greater than the array element spacing of the antenna array, it can be assumed that both the satellite signal and the interference signal are incident with plane waves. Therefore, the signal delay is only caused by the difference in the distance between the array elements.
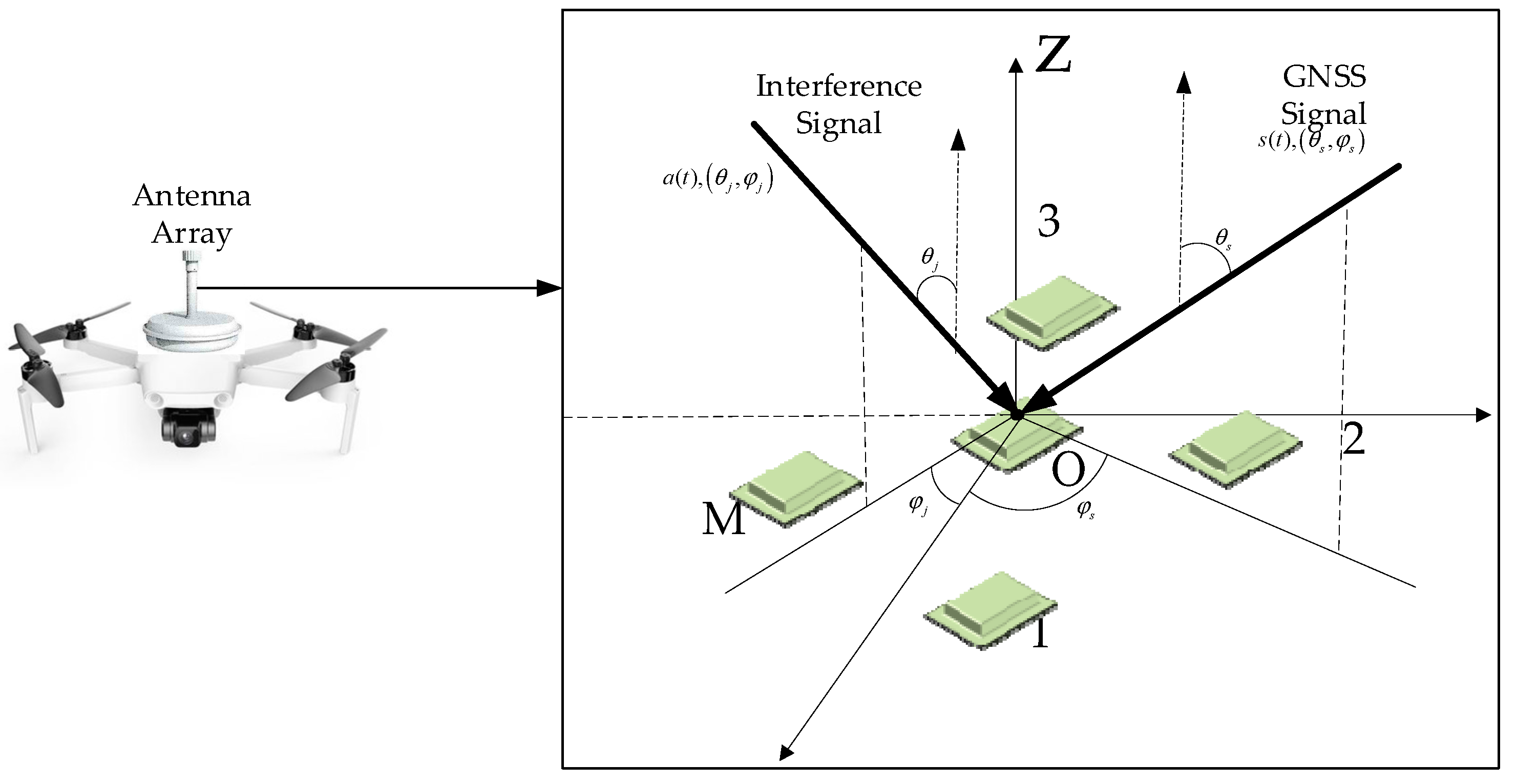
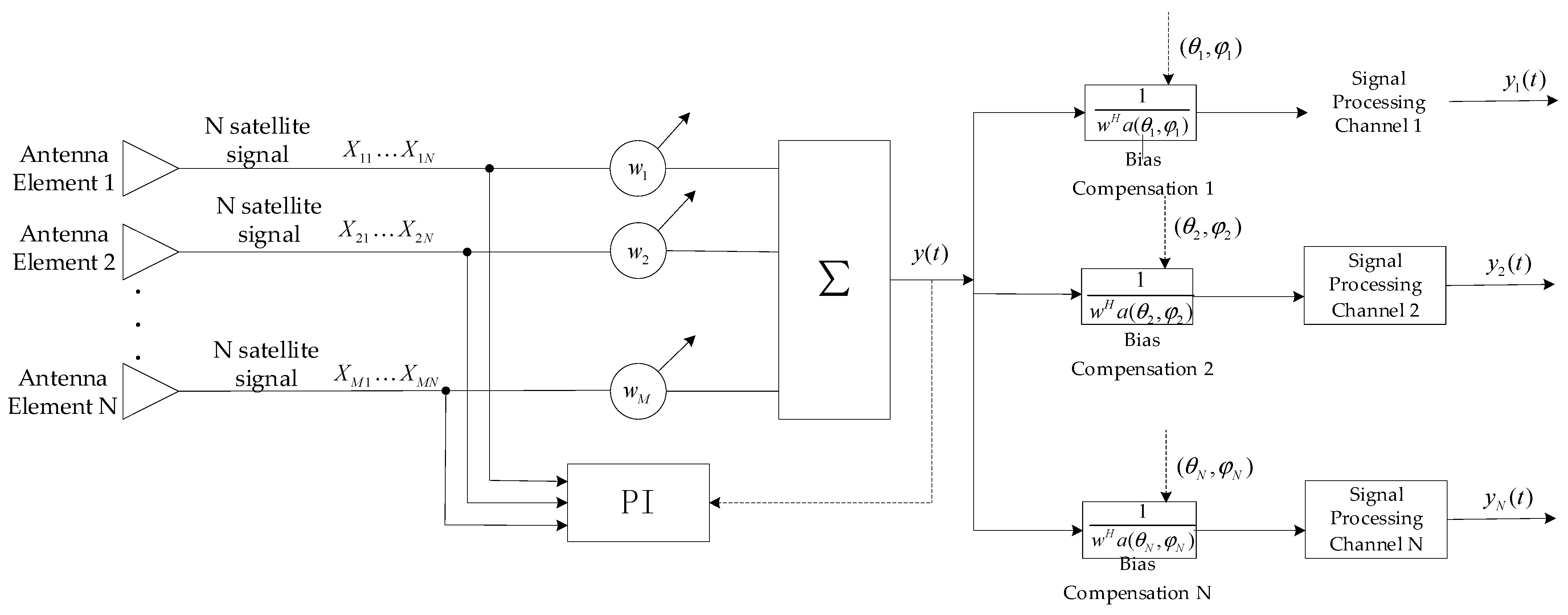
Figure 1 is the antenna array structure. The 1, 2, 3, …, M is the antenna array number. And the incident signal with each antenna is shown in (1).
Here, is the GNSS signal. . is the interference signal and is its number. is the noise that cannot be ignored.
The incident signal of the antenna array is as shown in (2).
Here, represents the steering vector of GNSS signal in each array element. represents the steering vector of the interference signal in each array element.
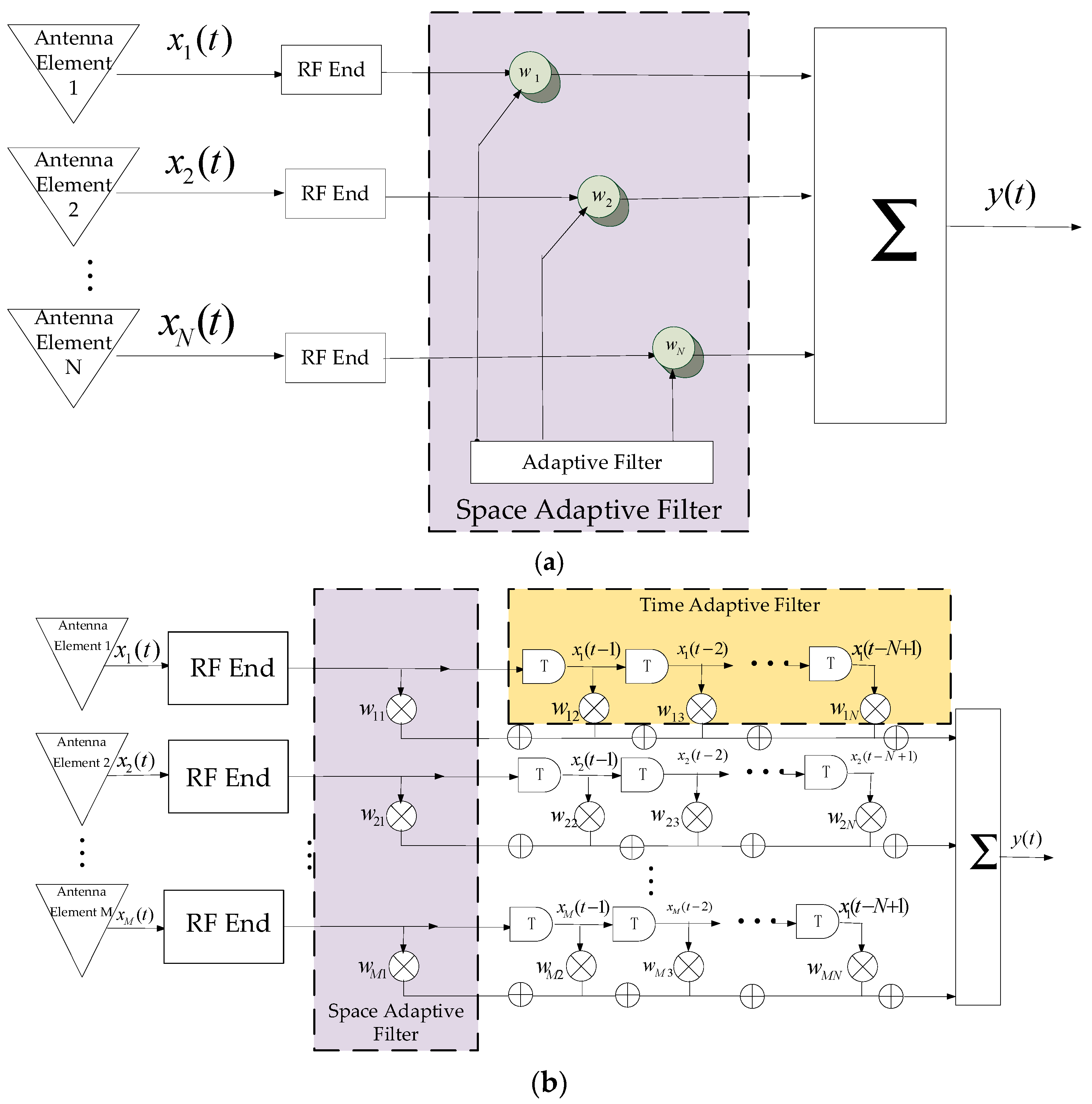
Figure 2a,b show the structures of SAP and STAP. The output signal of SAP is shown in (3).
Here,
is the antenna element weighting coefficient.
is the array antenna receiving signal after RF front-end processing [
26,
27].
For STAP, the anti-interference weight coefficient consists of a time domain coefficient and space domain coefficient. The output signal of STAP is shown in (4).
Here,
is the
-dimensional space-time weighted vector. And
is the
-dimensional receiving signal vector [
28].
2.2. Optimal Array Signal Weighting Criterion
In this section, we introduce the PI algorithm that does not need signal direction information and the MVDR algorithm that needs signal direction information.
The PI algorithm aims to minimize the output power of the array antenna and achieve the effect of filtering interference. The objective function and constraint function of the algorithm are as follows [
29].
Here, is the antenna array output signal power. is the input signal autocorrelation matrix. is the antenna element weighting coefficient. is the unit vector, which ensures that the weight response of the first reference element signal is constant to ensure that the weight value solved is effective.
The optimal weight coefficient
and antenna array output signal power
are as follows.
The MVDR algorithm forms the beam on the desired signal based on the minimum output power. However, the algorithm should obtain the satellite signal arrival information. The objective function and constraint function of the algorithm are as follows [
30].
Here, is the expected signal direction vector.
The optimal weight coefficient
and antenna array output signal power
are as follows.
2.3. Influence of Anti-Interference Algorithm on RTK Positioning
In RTK positioning, the motion station and the reference station receive two satellites signal at the same epoch. The receiver of the motion station makes a double difference in stations and satellites to eliminate clock difference, ionospheric delay, and tropospheric delay. And the double-difference carrier phase result
is shown in (9).
Here, is the wavelength of the carrier. represents the double-difference geometric distance. represents the double-difference integer ambiguity. denotes the double-difference observation noise. And the unknown parameters in (9) are .
Then, the Kalman filter is adopted to estimate the
. Its state equation and observation equation can be expressed as follows.
Here, k is the observation epoch time.
is the state vector at k. Assuming the satellite number is 4, the
.
is the motion station location.
is the double-difference integer ambiguity of satellites.
is the state transition matrix.
is the control-input model that is applied to the process noise
.
is the observation result at k.
is the observation model, which maps the true state space into the observed space.
is the observation noise, which is assumed to be zero-mean Gaussian white noise [
31,
32].
However, the phase bias introduced by the anti-interference algorithm itself will directly affect the carrier phase observations, thereby influencing the positioning distance. Therefore, the carrier phase observation is shown in (11).
In (11), is the phase bias that is introduced by the anti-interference algorithm.
According to the prediction and update process of the Kalman filter, the bias introduced in the carrier phase observation affects the observation matrix
; then, at the time of epoch k, the variable of state estimation can be shown as
And the predicted value of state at epoch k + 1 is
, where
. Therefore, the state estimation at k + 1 is as shown in (13):
The state estimation error at the time of k + 1 epoch is as shown in (14):
The observation matrix error of epoch k leads to the state estimation error of epoch k, and this error continues to be transmitted in the next epoch. And the impact on RTK positioning cannot be ignored, which will lead to a large RTK positioning bias or failure to obtain a position result. It is necessary to compensate for the bias introduced by the anti-interference algorithm to achieve the positioning of the RTK system.
2.4. Error Analysis
Assume the receiving signal of antenna element k is as shown in (15).
The satellite signal is . is the steering vector of the satellite signal in antenna element k. The interference signal is . is the steering vector of the interference signal in antenna element k. The noise is .
The antenna array steering vector
is shown in (16):
The coordinate of antenna element k is
. The unit vector of the incident signal direction is
. N is the element number of the antenna array. Therefore, the output signal of the antenna array is as shown in (17).
Here, , and .
For the SAP PI algorithm, the optimal weight coefficient
is a complex value that is only constrained by
. Therefore, based on (3) and (17), the output of the antenna array signal is
Therefore, the phase bias of SAP PI algorithm is
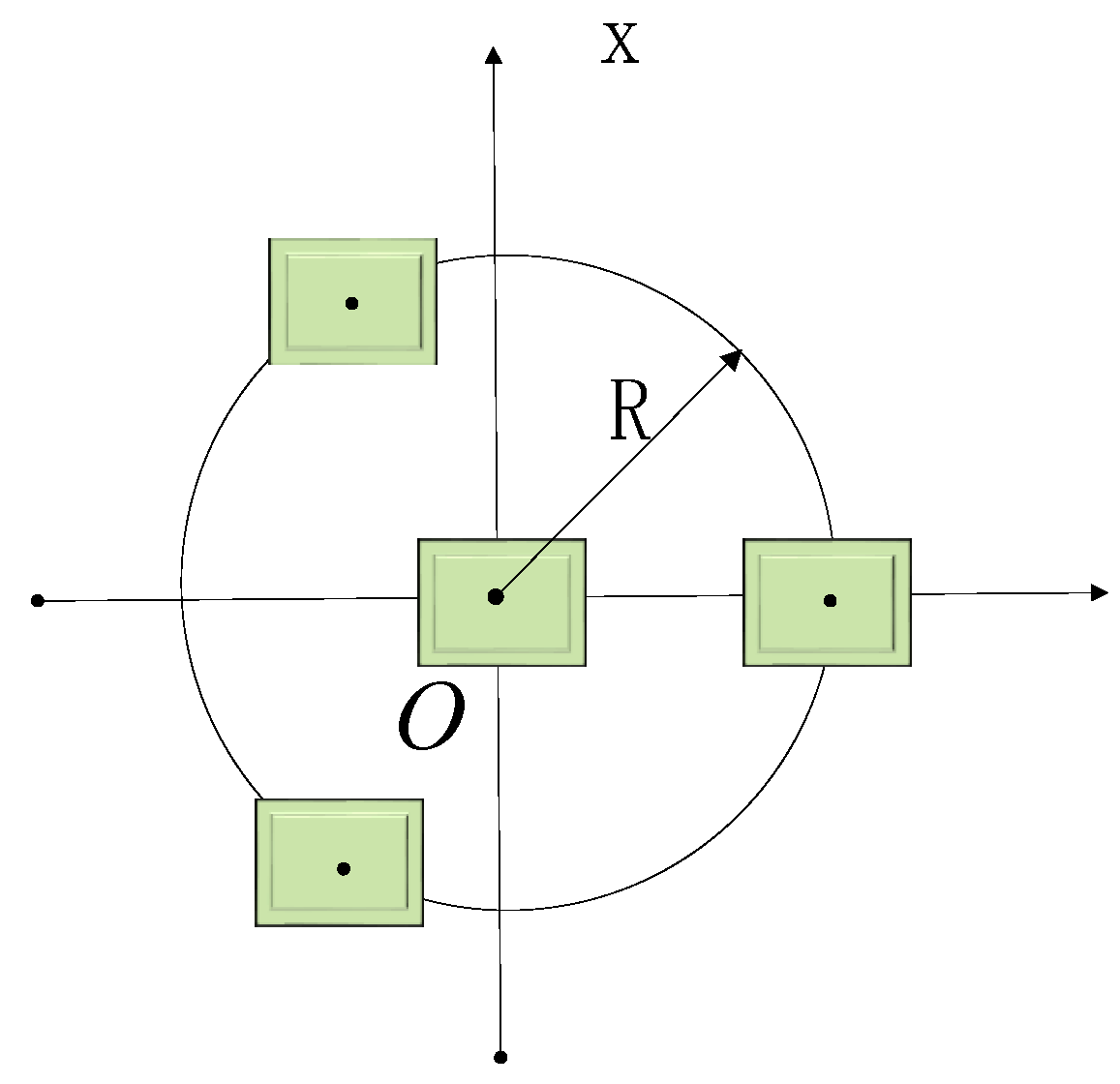
. Taking the four-element array as an example, the array distribution is shown in
Figure 3.
Assume that the reference element is at the origin point, the rest of the elements are evenly distributed on the circle, and the coordinates of the four elements are
. And the phase bias of SAP algorithm is as shown in (19).
Figure 4 shows the distribution of the phase bias.
For the STAP PI algorithm, the optimal weight coefficient is also a complex number, but the dimension adds the time domain parts compared with SAP. Therefore, the steering vector becomes the Kronecker product of the spatial domain steering vector and the time domain tap vector, which is the expansion of the dimension in the spatial domain, but also a complex number.
For the SAP MVDR algorithm and STAP MVDR algorithm, the optimal weight coefficient is a complex value constrained by . Therefore, the algorithms do not introduce phase bias.
2.5. The Bias Compensation Method for Anti-Interference Algorithm
In this section, we take a simple array element distribution as an example and provide the sufficient conditions for error compensation. First, we provide the rough bias compensation method based on array weighted-coefficient conjugation. Second, we propose the bias compensation at an anti-interference output signal.
2.5.1. Bias Compensation Method Based on Array Weighted-Coefficient Conjugation
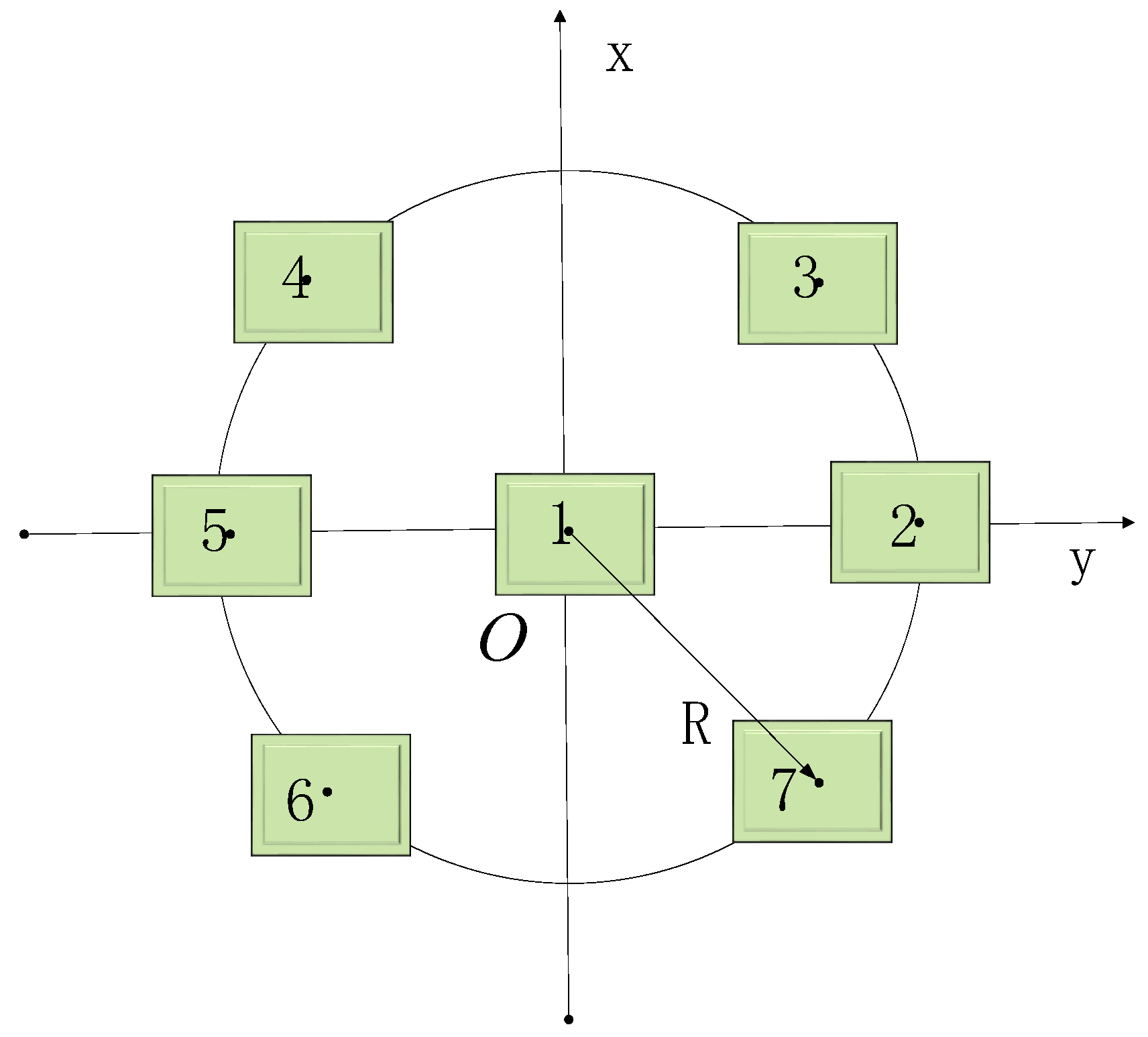
We take seven elements as an example to illustrate the bias compensation algorithm with an odd number of elements. The distribution of elements is as shown in
Figure 5.
In the antenna array, elements 2 and 5 are symmetrical, elements 3 and 6 are symmetrical, elements 4 and 7 are symmetrical, and the coordinates are
,
,
,
,
,
, and
. Therefore, the antenna element delay
and weight coefficients
have the following relationship.
The phase bias of the PI algorithm in the antenna array is shown in (21).
Therefore, the weight coefficient of the seven-element antenna array is a real value that does not introduce phase bias. Based on the analysis, we propose the seven-element zero-phase-bias PI criterion in SAP as shown in (22).
The terms in (22) can be expressed as (23) with a matrix.
Here,
, and
. And (23) can be simplified as (24).
The Lagrange derivation is used to obtain the optimal solution, and the Lagrange expression is shown in (25).
Here,
is an unknown constant vector and partial derivative with respect to
. The result is (26).
And (26) can be expressed as (27).
Substituting (27) into (23), we can obtain (28).
Combining (28), we obtain (29).
Simplifying (29), we obtain (30).
Substituting
into (28) and (29), we can obtain (31).
Here, is the weight coefficient.
2.5.2. Bias Compensation at Anti-Interference Output Signal
To improve the phase bias compensation accuracy, we adopt phase bias compensation after the anti-interference algorithm to achieve bias compensation. The steps are as follows.
Step 1. Obtaining the signal after the SAP algorithm based on (31);
Step 2. Multiplying the reciprocal of
as in (32).
is the output signal after the SAP algorithm.
Obviously, it is feasible in theory, and the method is simple. The structure is shown in
Figure 6. At the receiver end, each channel eliminates the bias for the specific direction signal.
3. Results
3.1. The Phase Bias Simulation
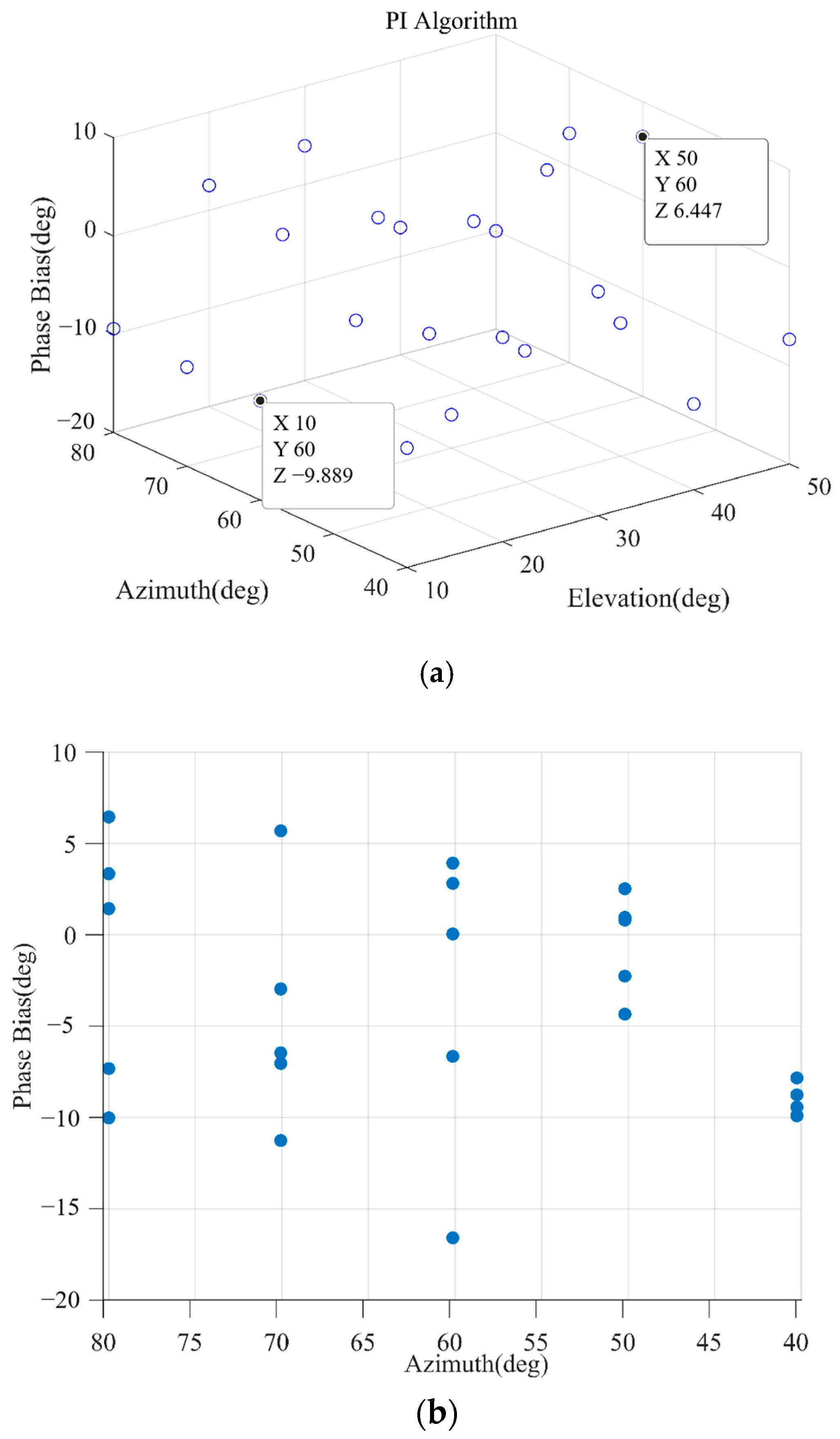
Assume the incident signal from . The RF is 1268.52 MHz, intermediate frequency (IF) is 46.52 MHz, and sampling frequency is 62 MHz. A broadband interference signal is taken from the nearby angular domain , . The phase biases that has introduced by the SAP PI algorithm, STAP PI algorithm, and SAP MVDR algorithm are as follows.
In the SAP PI algorithm, the phase biases of three-dimension distribution and two-dimension distribution are shown in
Figure 7a,b. The phase bias ranges from
to
. When the direction of the interference signal is the same as the satellite signal, the phase bias is
.
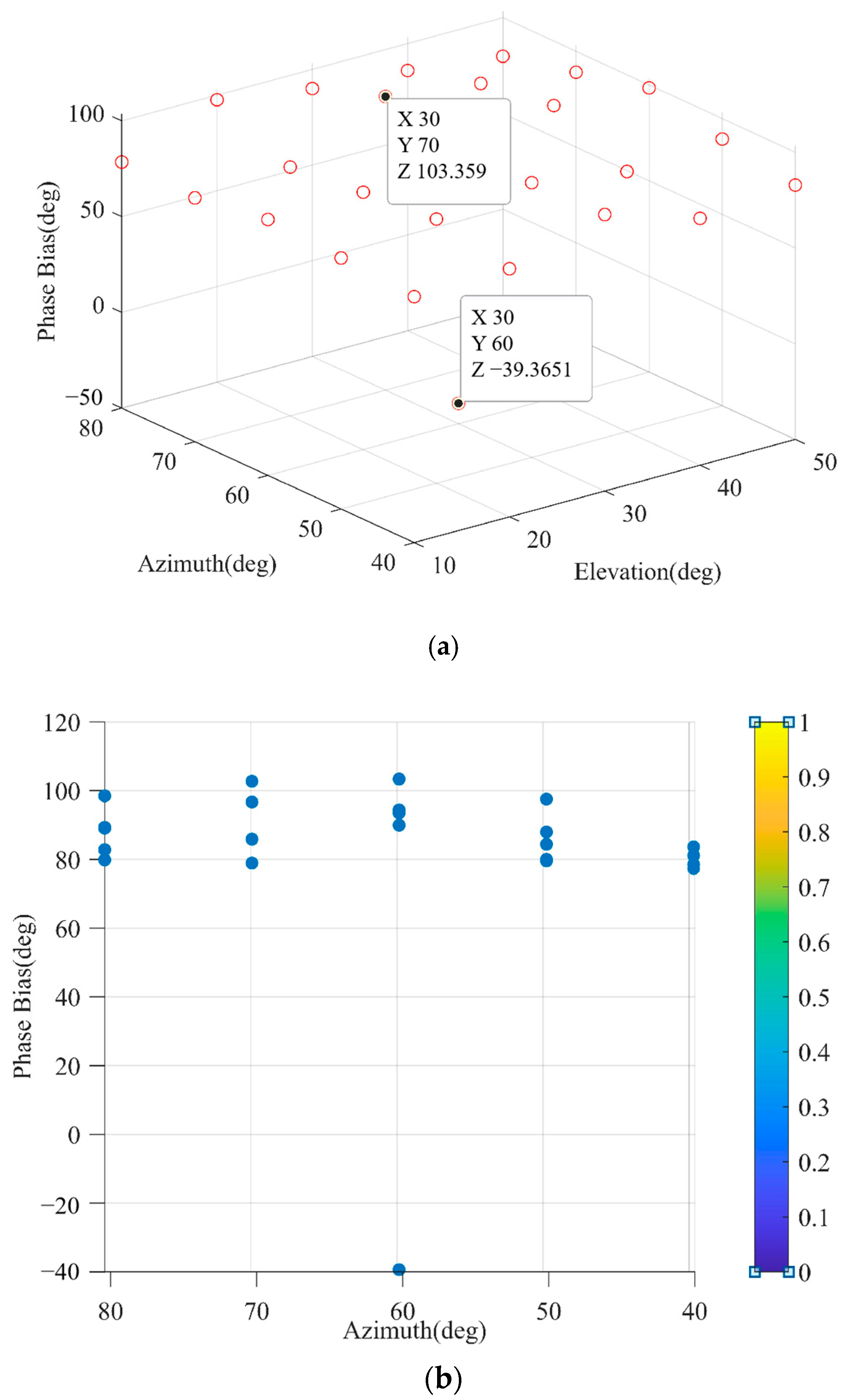
In the STAP PI algorithm, the phase biases of three-dimension distribution and two-dimension distribution are shown in
Figure 8a,b. The phase bias ranges from
to
. When the direction of the interference signal is the same as the satellite signal, the phase bias is
.
In the STAP MVDR algorithm, the phase biases of three-dimension distribution and two-dimension distribution are shown in
Figure 9a,b. Based on the analysis of
Section 2.5.1, the MVDR criterion will not introduce phase bias. Therefore, the phase bias in
Figure 9 is
.
3.2. The Performance of Anti-Interference Algorithm with Phase Bias Compensation
Assume the incident signal from . The RF is 1268.52 MHz, intermediate frequency (IF) is 46.52 MHz, and sampling frequency is 62 MHz. The carrier-to noise ratio (CNR) is 45 dB. A broadband interference signal is from , and the interference-to-noise ratio is 75 dB.
We take five- and seven-element antenna arrays as examples of odd-element arrays, and the weight coefficients are shown in
Table 3. In
Figure 10, the anti-interference performance of phase bias compensation is given.
The anti-interference algorithm with phase bias compensation creates a beam null in the direction of the interference, effectively suppressing the interference signals. However, it results in an approximately 10~12 dB attenuation of the useful signals, leading to a decrease in the output signal-to-noise ratio compared to the algorithm without bias compensation. Nevertheless, while the algorithm suppresses interference, it does so at the cost of signal-to-noise ratio loss without affecting the phase of the output signal, demonstrating the effectiveness of this algorithm.
4. Discussion
In this section, we discuss the phase compensation performance based on the tracking process of the GNSS receiver.
In
Figure 11, we provide the carrier phase of the original satellite signal and the carrier phase after anti-interference algorithm processing. It can be observed that within one cycle, the phase bias from the original satellite signal is approximately 179.5°.
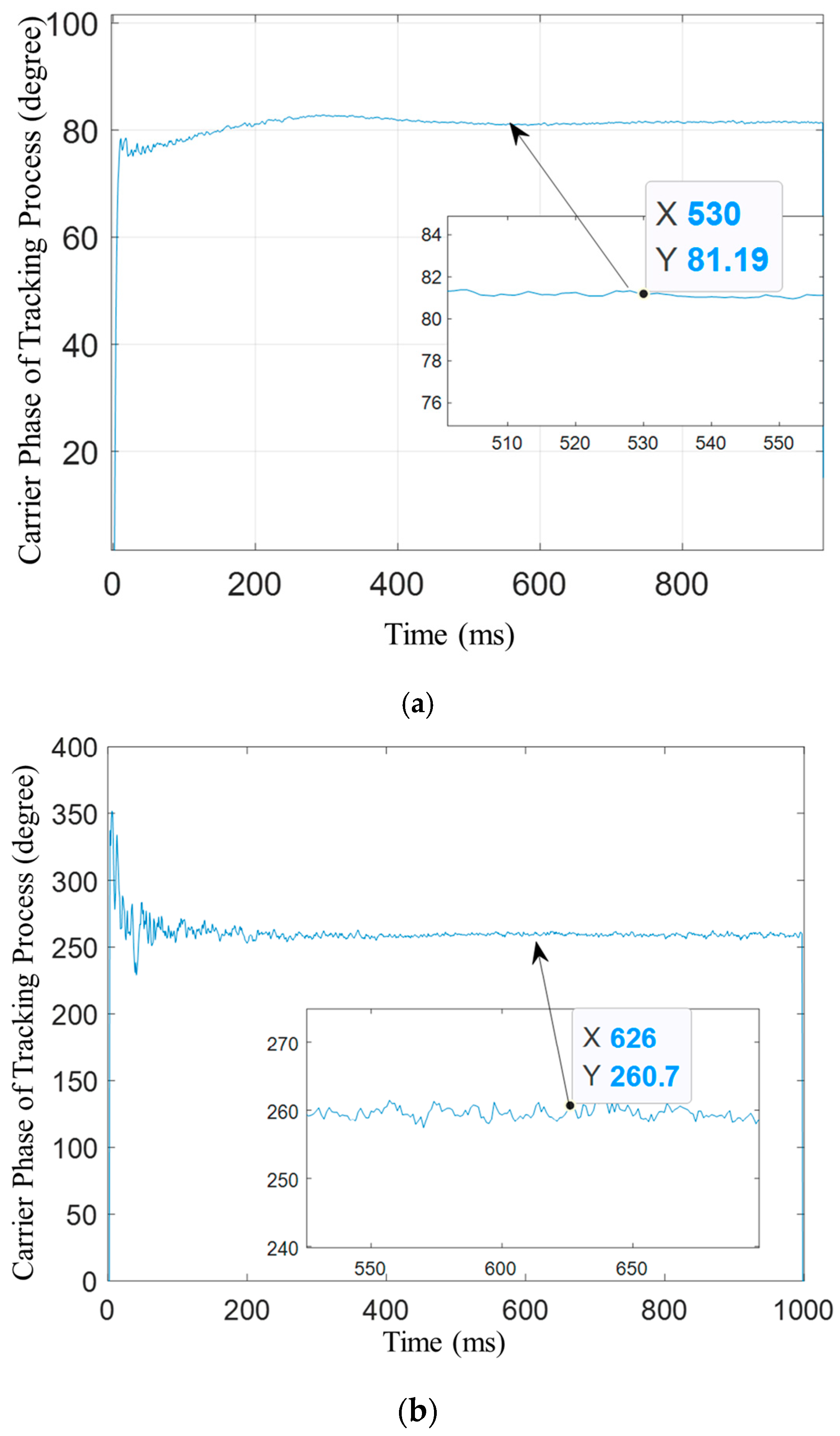
When the number of array elements is five or seven, the simulation results of the bias compensation method based on array weighted-coefficient conjugation are as follows.
Figure 12a indicates the phase of the bias compensation method based on array weighted-coefficient conjugation when the number of antenna elements is five and
Figure 12b indicates the phase bias compensation results when the number of antenna elements is seven. Only when the operating time is over 700 ms does the carrier phase approximate that of the original desired signal. When the rough compensation can meet the phase measurement accuracy requirements, the user can adopt the results. However, when users have higher requirements for phase measurement accuracy and stability, they need to use fine compensation to increase the accuracy.
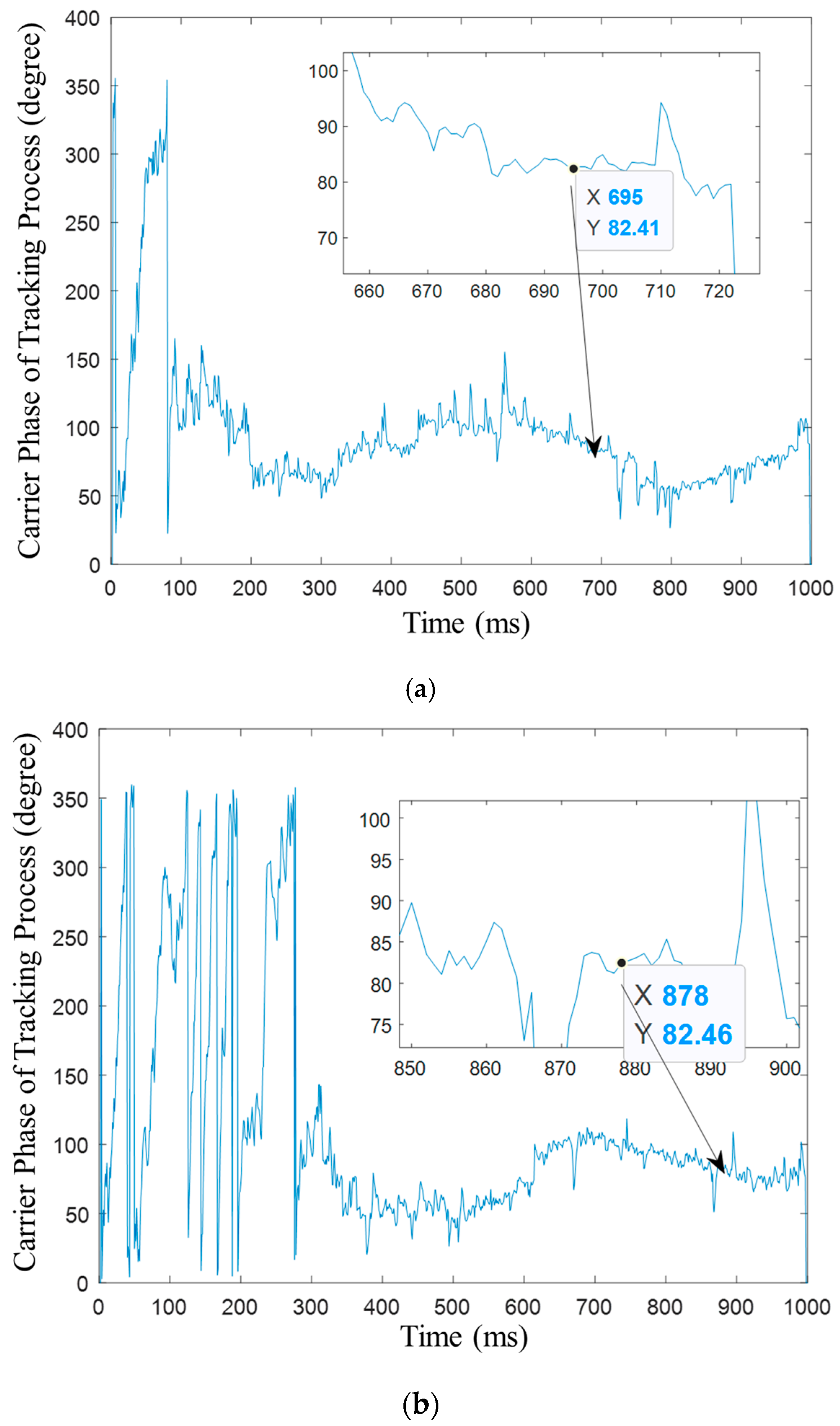
In
Figure 13, we provide the phase bias compensation results at the anti-interference output signal. The difference between the output signal and the original satellite signal is only 2°.
The simulation scenario of
Figure 13 is established with the jammer-to-signal ratio (JSR) of 48 dB. Therefore, we analyze the effectiveness of the compensation algorithm at different JSR values. Simulation experiments are conducted with JSRs set to 51 dB and 54 dB.
As shown in
Figure 14a, with a JSR of 51 dB and a carrier-to-noise ratio (CNR) of 72 dB, the carrier phase of the original satellite signal is around 82°, while the carrier phase of the output signal after anti-interference is approximately 91°, introducing a deviation of about 9°. After applying the compensation algorithm, the mean phase bias is reduced to 0.23°, and the variance phase bias is 2.77°.
In
Figure 14b, with a JSR of 54 dB, a CNR of 69 dB, and a jammer-to-noise ratio (JNR) of 50 dB, the situation is similar to that of a JSR of 51 dB. Anti-interference introduces a bias of 8.6°, but the compensation algorithm can keep the mean phase bias within 0.04° and the variance phase bias within 2.41°.
In
Figure 14c, with a JSR of 63 dB, CNR of 60 dB, and JNR of 50 dB, the compensation algorithm similarly achieves the desired compensation effect. After the phase bias compensation, the mean phase bias is reduced to 0.25°, and the variance phase bias is 4.62°.
In
Figure 14d, with a JSR of 73 dB, CNR of 50 dB, and JNR of 50 dB, it is impossible to achieve compensation with the anti-interference algorithm.
Table 4 shows that the phase bias compensation consistently reduces the mean phase bias to near-zero levels across all JSR and CNR conditions, indicating effective compensation. However, the variance of phase bias generally increases after compensation, suggesting some variability in the compensation process, which may need further investigation or optimization. Moreover, with JSR increases and CNR decreases, the mean phase bias in the anti-interference stage increases, indicating higher interference levels. The compensation stage remains effective in reducing the mean phase bias, but the variance remains a concern.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}