1. Introduction
Low-level wind shear, precisely defined as a rapid and substantial variation in wind direction or speed within an altitude range below 600 m, poses a notably significant threat to aircraft operations during the critical take-off and landing phases [
1]. This is primarily attributable to its inherently short temporal span, highly heterogeneous and variable manifestations, and formidable and potentially catastrophic destructive potential [
2]. When an aircraft encounters intense low-level wind shear, it tends to experience instantaneous and significant alterations in lift and altitude [
3]. Such abrupt changes can exert a profound and adverse impact on flight mechanics, thereby substantially increasing the likelihood and risk of a catastrophic accident [
4,
5,
6]. Consequently, this perilous meteorological phenomenon has been metaphorically referred to as the “invisible plane assassin” within the aviation field [
7]. A multitude of meteorological elements and factors, including fronts that demarcate the boundaries between disparate air masses with distinct characteristics, downbursts representing powerful and concentrated downdrafts of air, low-level rapids denoting rapid and frequently turbulent wind currents at lower altitudes, and turbulence characterized by disordered and erratic air motions, all actively contribute to the occurrence of low-level wind shear [
8,
9,
10].
Wind Lidar, a state-of-the-art wind measurement instrument, utilizes aerosol particles as tracers and employs the Doppler effect to retrieve the atmospheric wind field [
11]. Compared with traditional weather radars and wind profilers, it demonstrates superior accuracy and higher resolution in wind field detection [
12]. As Wind Lidar technology has been continuously evolving, its application in wind shear detection has been steadily advancing and approaching a stage of greater maturity. The prevalent scanning modalities of Lidar include the Plan Position Indicator (PPI), the Range Height Indicator (RHI), Doppler Beam Scanning (DBS), and Slide Path Scanning (SP) [
13,
14]. Each of these scanning modalities is accompanied by its own specific set of wind shear detection algorithms. For example, the slope detection, S-factor, F-factor, and modified F-factor algorithms are formulated based on the data acquired from the SP scanning mode [
15,
16,
17]. Meanwhile, least-squares fitting and eight-neighbor algorithms are designed in line with the data obtained from the PPI scanning mode. Numerous factors contribute to the complexity and difficulty of accurately determining the actual intensity, location, and impact of wind shear on aircraft flights solely based on the local wind field [
18]. The diversity of wind shear types, the significant differences and complex evolution processes among different wind shear phenomena, and the transient and dynamic characteristics of wind fields, all contribute to this complexity [
19,
20]. Consequently, it is of profound scientific significance for aviation safety to conduct a comprehensive evaluation and judgment of the influence of varying wind shear intensities on aircraft and to prudently select appropriate warning thresholds. This not only contributes to enhancing the safety and reliability of flight operations but also lays a critical foundation for the development and refinement of more effective wind shear prediction and mitigation strategies.
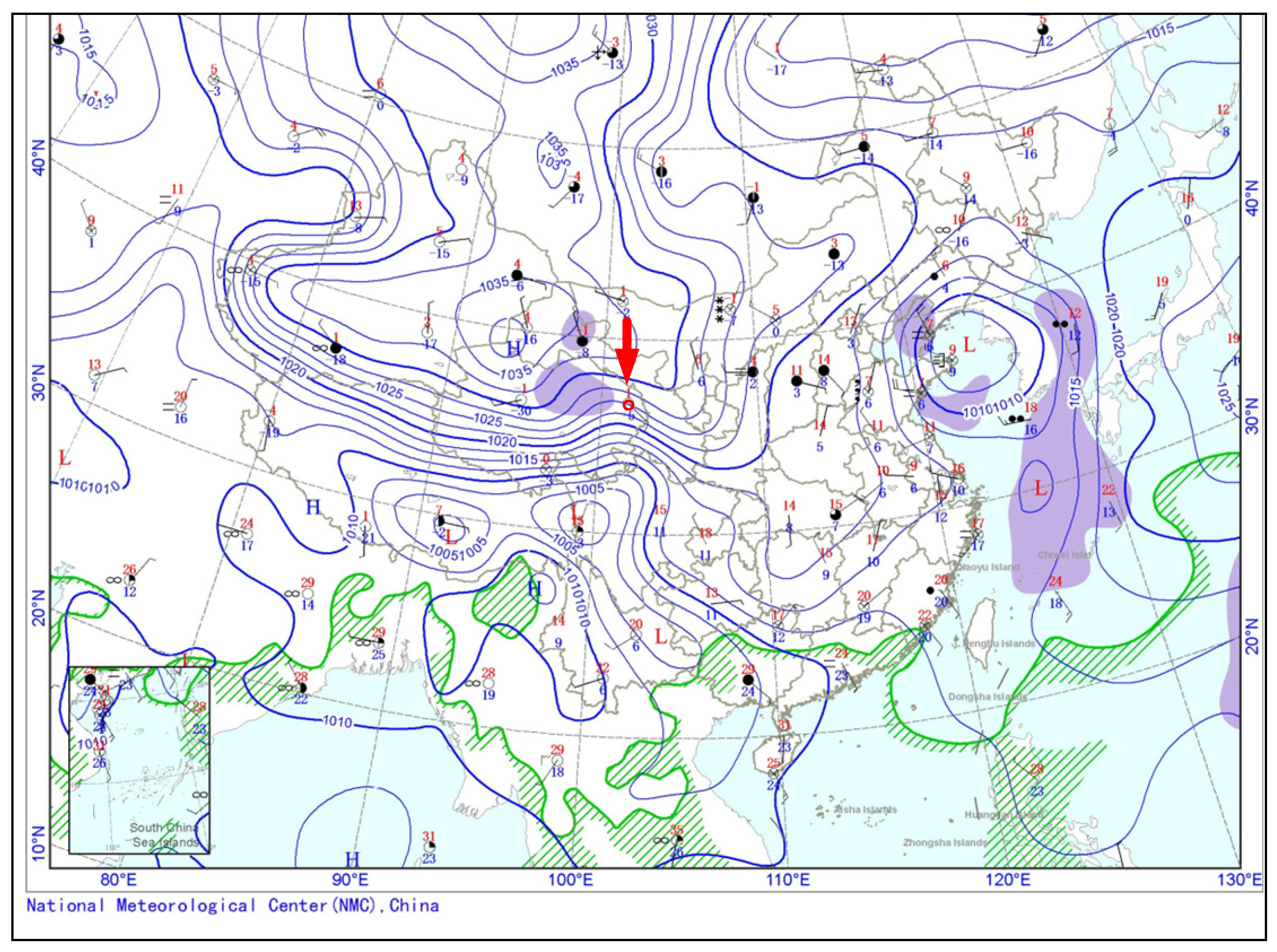
In several previous research studies, a limited number of scholars have utilized diverse algorithms and types of equipment to analyze the wind field data, resulting in disparate wind shear information [
21,
22,
23]. This makes it difficult to compare information, such as the strength of wind shear, captured by different instruments. Given this situation, the current study centers on the process of low-level wind shear induced by a frontal system at Xining International Airport (located at 36°31′42′′N, 102°02′49′′E and with an altitude of 2184 m) in Qinghai Province, China. Based on the wind shear data obtained from Lidar observations in the Slide Path Scanning (SP) mode, a comprehensive analysis combined with three detection algorithms is carried out. Specifically, the slope detection algorithm, which takes advantage of the gradient characteristics of the wind field parameters, is employed to identify potential wind shear regions. The S-factor algorithm, which is based on specific mathematical relationships and statistical measures within the wind field data, is used to assess the likelihood of wind shear occurrence. Moreover, the modified F-factor algorithm, which is designed to improve the sensitivity and precision of wind shear detection, particularly in complex meteorological conditions, is applied. Furthermore, an in-depth exploration is conducted to clarify the characteristics of the wind field and the evolutionary process of wind shear under the influence of the frontal system. This entails a meticulous examination of the temporal and spatial variations of wind speed, direction, and other relevant parameters.
The paper is structured as follows.
Section 2 is dedicated to the introduction of the utilized Lidar and its data processing method.
Section 3 presents the weather background and aircraft voice reports during the passage of the frontal system at Xining International Airport.
Section 4 is devoted to the analysis of wind fields and the results of wind shear detection using different algorithms. The final section (
Section 5) offers the conclusions and discussions.
3. Data Processing
3.1. Processing Flow
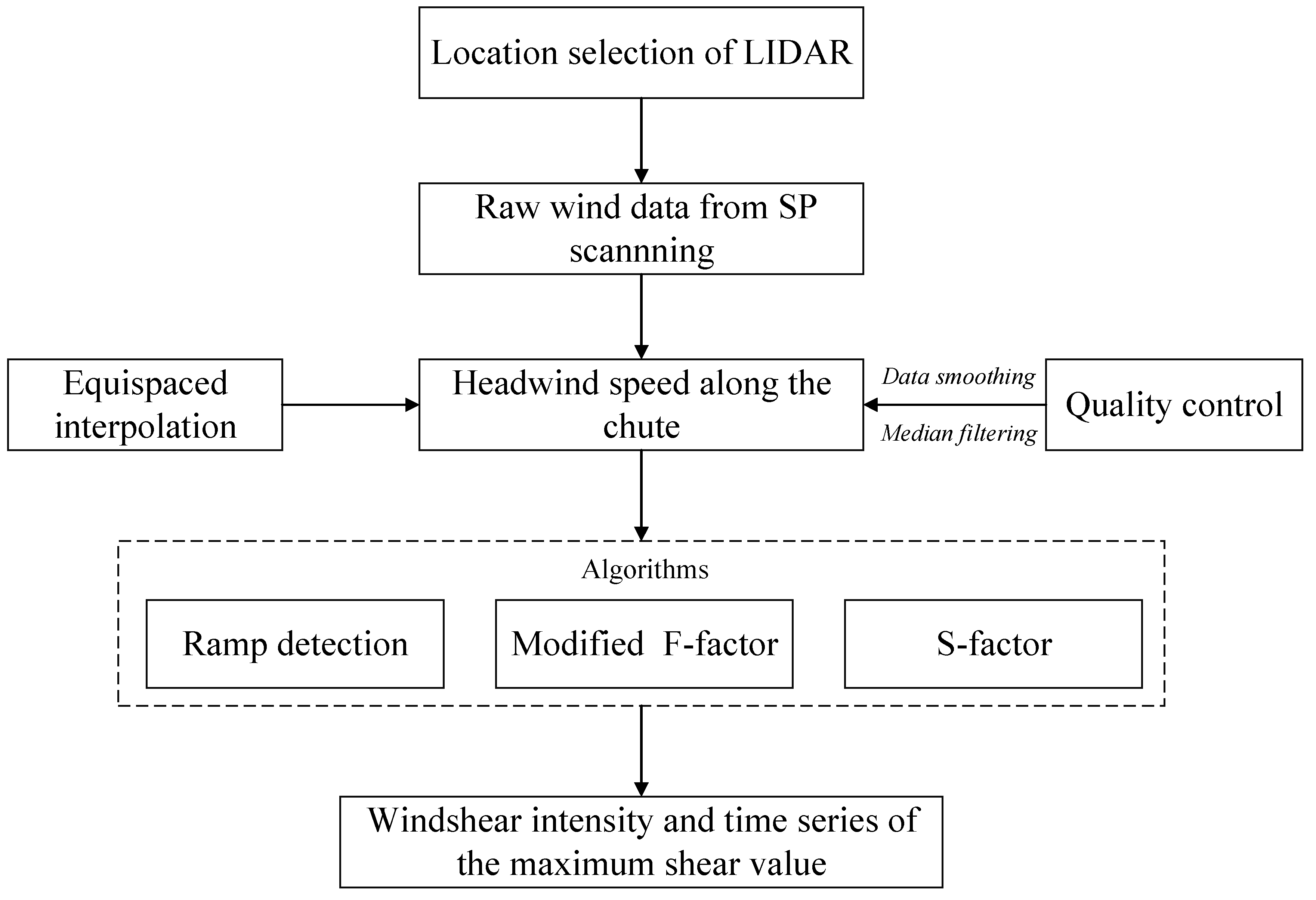
The headwind speed was extracted based on the data retrieved from SP scanning. Median filtering, data smoothing, and mean processing were all required to be implemented in order to obtain a high-quality headwind profile of the slope. Subsequently, the slope detection algorithm, the S-factor algorithm, and the modified F-factor algorithm were utilized to identify the wind shear intensity, and thereafter the maximum value was selected. The maximum value was extracted to construct a time series. The data processing flow is illustrated in
Figure 4.
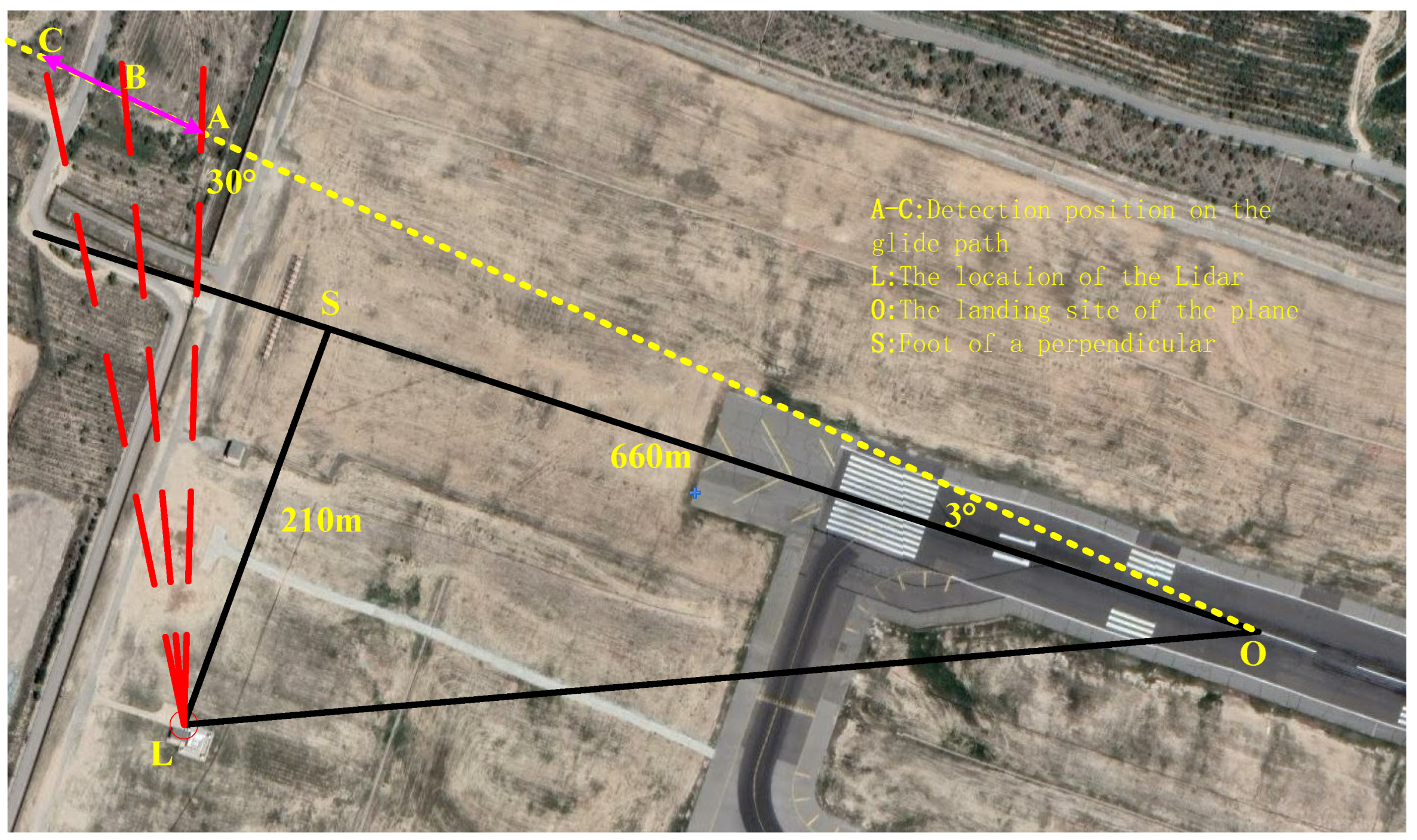
The specific data processing procedures are expounded as follows. At the outset, the headwind speed along the glide path was calculated. When the angle between the laser beam and the aircraft flight path was less than 30°, the radial wind speed nearest to the glide path position was ascertained as the glide path speed at that specific location. Moreover, individual isolated points at the distal end, which might be attributed to clouds, were excluded. Subsequently, the headwind speed of the glide path at diverse locations was obtained via interpolation at 100 m intervals (corresponding to an approximate height of 5 m at a 3° elevation) along the glide path direction, with the landing point designated as the origin. Subsequently, data quality control predicated on a 5-point median filter was carried out to smooth the interpolated data. Inasmuch as the wind field characteristically manifests pronounced gust features, and when an aircraft voice report is available, it is conventionally evaluated based on the deviation of the aircraft trajectory, which is temporally delayed. Thus, the time of the aircraft voice report was taken as the starting point, and the headwind profiles of the three previous consecutive SP scans were averaged (within a time interval of 13–20 min) to compute the current headwind wind profile.
Subsequently, the slope detection algorithm, the S-factor algorithm, and the modified F-factor algorithm were utilized to process the headwind profile and procure the wind shear intensity values at different locations and altitudes. Ultimately, the maximum values of the computed wind shear intensity were selected and employed as an alarm indicator. Moreover, all SP data from 09:00 to 19:00 on 5 April 2023 were processed to extract the maximum values for different algorithms, thereby facilitating the assessment of the validity and efficacy of these algorithms. This comprehensive data processing methodology is of utmost importance for guaranteeing the accuracy and reliability of the wind shear detection and analysis, as it takes into account diverse factors and uncertainties inherent in the wind field and data collection process. For example, the interpolation step contributes to generating a more continuous and representative headwind speed profile, while the median filter alleviates the influence of spurious data points. The averaging of the headwind profiles in accordance with the aircraft’s voice report time is designed to address the time-lagged nature of the aircraft’s trajectory-based wind shear detection and furnish a more accurate and timely evaluation of the wind shear conditions.
3.2. Wind Shear Identification Algorithm
3.2.1. The Slope Detection
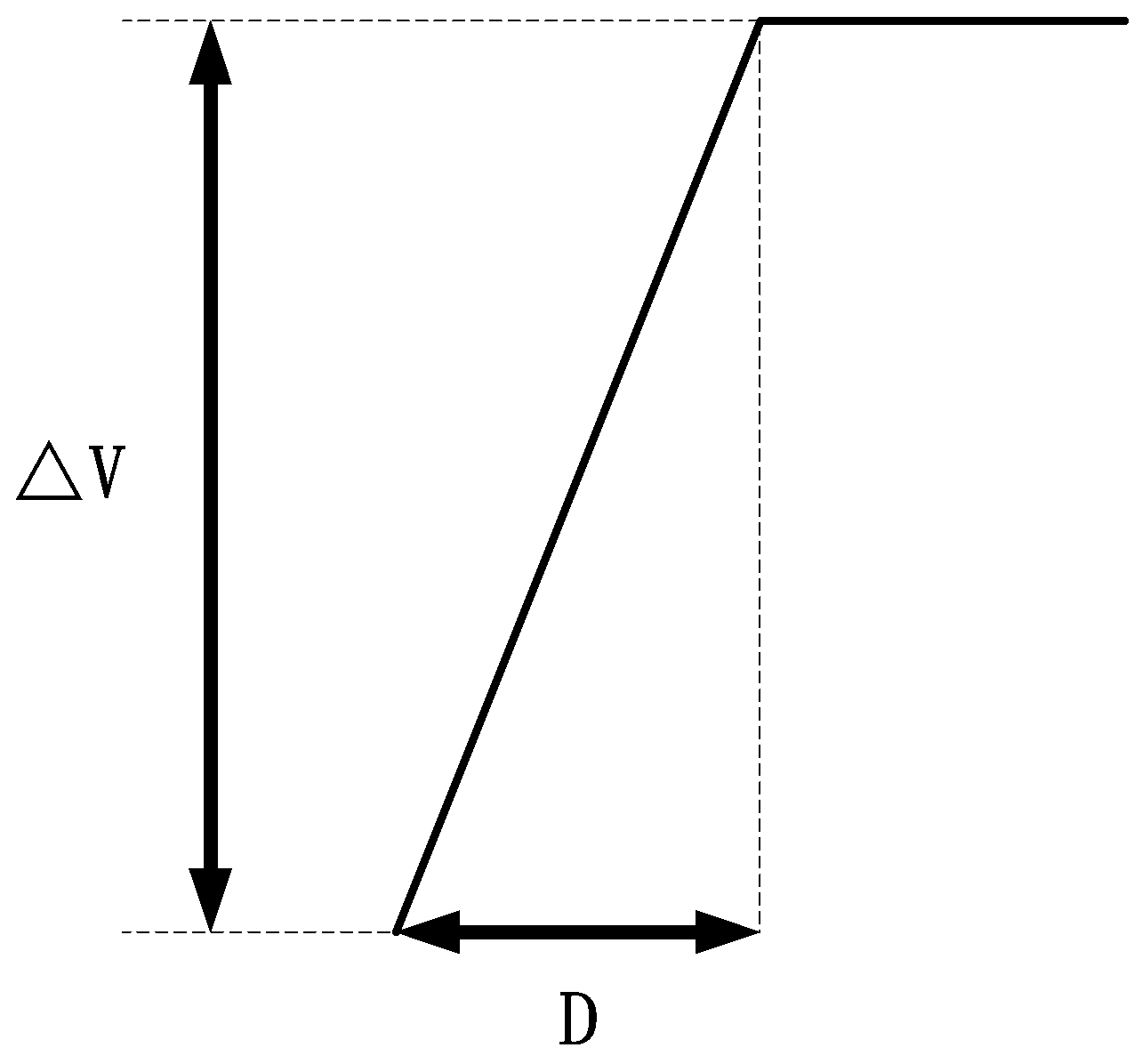
The principle of the slope detection algorithm is illustrated in
Figure 5. The slope herein pertains to the aircraft’s glide path. In the figure,
represents the length of the glide path over a specific distance, and
V is the variation in wind speed within the length of the glide path. The slope detection algorithm is based on the definition of wind shear. The crux of this method lies in calculating the change value of wind speed on the wind profile over a certain distance and further differentiating the intensity in accordance with the change value.
Owing to the presence of certain noise data within the original wind profile data, which can exert an impact on the ultimate wind shear detection outcomes, it is essential to conduct filtering on the original wind profile prior to implementing the slope detection algorithm. A sliding average method is frequently employed. The original wind profile is denoted by
, and the wind profile processed via the smoothing formula is represented by
. The smoothing formula is presented in Formula (1).
In Formula (1), the sampling distance is represented by
, and the Wind Data Point is represented by
. After smoothing the original wind profile, the slope can be detected, and the slope detection formula is shown in Formula (2).
The in Formula (2), equal to , represents the midpoint of the low-level wind shear, and represents the detection distance, that is, the length of the slope.
The intensity of low-level wind shear is expressed by the gradient of wind velocity change per unit distance. The International Civil Aviation Organization (ICAO) divides wind shear into four grades, mild, moderate, strong, and severe, as shown in
Table 2. In practical operation, it should be noted that the temporal and spatial resolution of the data needs to be considered, although this aspect is not directly related to the intensity grading. According to ICAO, the wind speeds corresponding to different levels of horizontal wind vertical shear are as follows. For the mild level, it is ≤2 m/s per 30 m vertical range; the moderate level ranges from 2.1 to 4.0 m/s per 30 m vertical range; the strong level is from 4.1 to 6.0 m/s per 30 m vertical range; and the severe level is greater than 6.0 m/s per 30 m vertical range. In this paper, the minimum severe wind shear strength of the ICAO standard is used as the warning threshold, because a level below it could lead to loss of control of the aircraft, and the aircraft must steer clear of them when the higher ones are encountered.
3.2.2. Shear Intensity Factor
The wind shear strength is determined by the total wind speed variation and the wind speed variation rate, so the wind shear strength factor formula is the product of these two terms, which is defined as
where
is the rate of change in wind speed,
is the magnitude of the change in wind speed, R is the corresponding length of detection, and
is the approach speed of the aircraft during landing.
is the total change in wind speed, which usually affects the aircraft more than the rate of change in wind speed; this is also the reason why the traditional slope algorithm only detects the change of wind speed for wind shear warning, so the term is quadratic.
In this paper, the slope length is 600 m (30 m height; the 3° elevation corresponding to height is 573 m, according to 600 m), and the S-factor intensity partition range corresponding to different strength grades can be calculated, so the minimum severe wind shear strength, 0.711, is used as the warning threshold.
3.2.3. Modified F-Factor
The force of the airplane in the wind field mainly includes the thrust
of the airplane engine, the resistance
of the air to the airplane, and the gravity
of the airplane itself. In a uniform wind field, the total energy of the aircraft per unit gravity can be expressed by Formula (4).
where
is the altitude of the aircraft,
is the airspeed of the aircraft, and
g is the gravitational acceleration. Then, the F-factor can be expressed as
The modified F-factor algorithm is proposed by the Civil Aviation University of China after discovering the relationship between the wind speed on the glide slope,
, and the vertical wind,
, through modeling, as shown in (6):
where
is the distance between two points on the glide slope. At present, there is no clear definition of the alarm threshold of the F-factor algorithm in the world. The F-factor warning threshold, ±0.105, proposed by Hinton in 1993 is used in this paper [
24]. When the F-factor exceeds the threshold, it is considered a danger to the aircraft.
5. Results
The three algorithms were utilized to calculate the wind shear intensity by leveraging the Lidar data procured from the SP scanning mode. The headwind speed constituted the foundation for computing wind shear information, and the incidence of wind shear was determined in compliance with the pre-defined thresholds. As illustrated in
Table 4, the threshold value for the slope detection and S-factor were ascertained by referring to the wind shear rating criteria stipulated by ICAO, which classifies the wind shear rating into four disparate groups. The minimum severe wind shear strength of the standard set by ICAO is used as the warning threshold, as described in
Section 3.2.1. Regarding the F-factor, in light of the lack of an international standardized warning threshold, empirical thresholds are prevalently employed in practical applications. Chan et al. employed aircraft voice reports as the wind shear reference values and experimentally ascertained that the negative F-factor exhibits superior performance in wind shear warnings in contrast to the positive F-factor. Additionally, the warning threshold applicable to the flight operations at Hong Kong International Airport was −0.05. In this study, the F-factor warning threshold proposed by Hinton in 1993 was chosen. It is deemed that exceeding this F-factor value presents a hazard, notwithstanding the absence of further classification. The congruence of the results of different algorithms was appraised by comparing the severity levels of the slope detection and the S-factor with the warning outcomes of the modified F-factor. This comprehensive evaluation methodology is of primordial importance for validating the dependability and precision of the different algorithms in detecting and appraising wind shear, as it accommodates the variegated characteristics and limitations of each algorithm. The calibration of the S-factor threshold and the selection of the F-factor threshold were effected to optimize the performance of the algorithms and ensure more accurate identification and quantification of wind shear events, which is of cardinal significance for augmenting aviation safety and furnishing more precise meteorological support for flight operations.
5.1. General Analysis of Local Winds
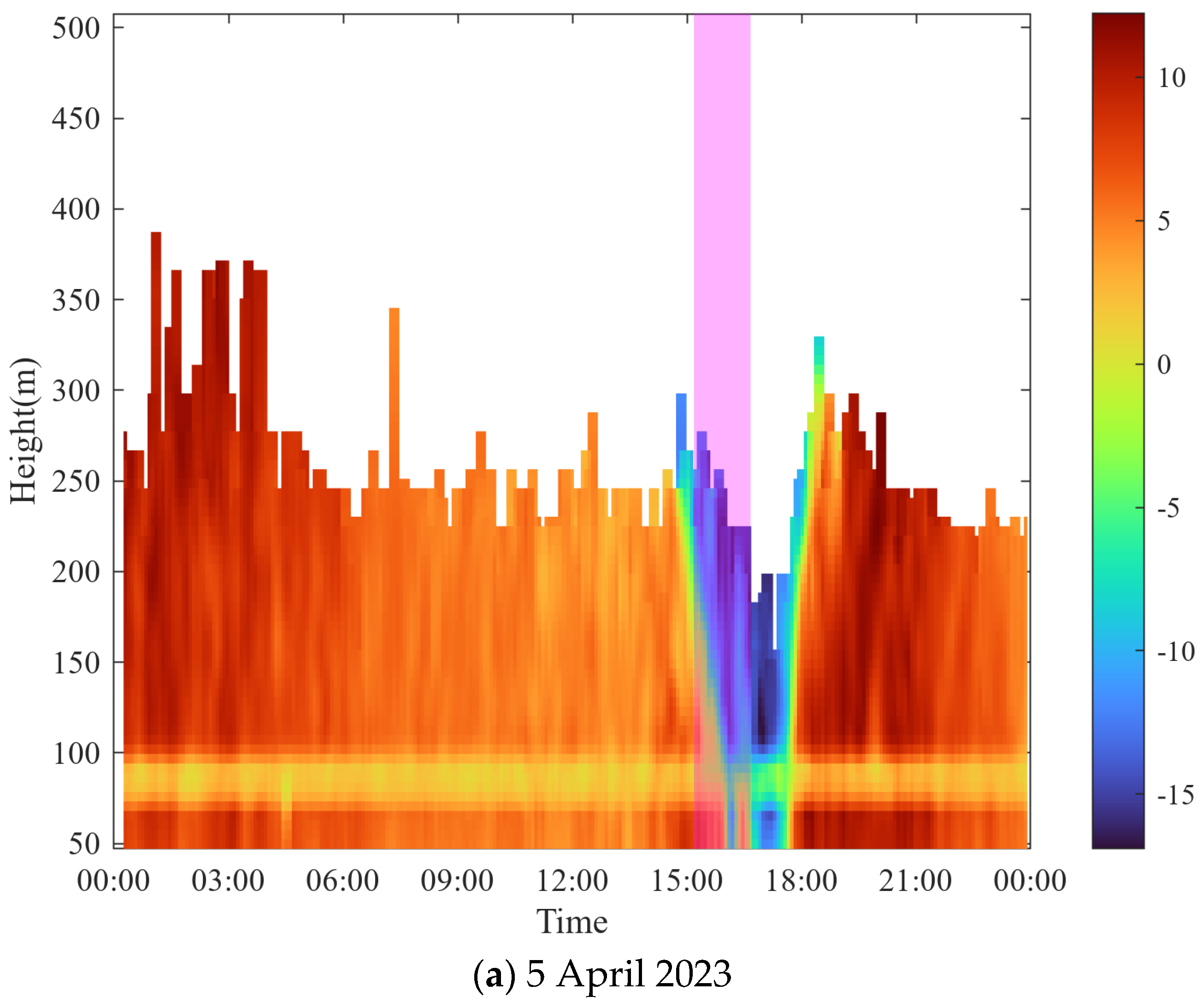
The flight arrival times during the day were within the range of 07:36 to 22:50, and all SP scans within the time interval from 09:00 to 19:00 were subjected to analysis. As illustrated in
Figure 8a, a conspicuous wind speed discontinuity layer was detected at altitudes ranging from 70 to 100 m over an extended period. This was potentially attributable to the existence of an inversion temperature at this altitude. From high to low altitudes, there is a progression from a downwind condition to an upwind condition. After the wind shear has elapsed, it returns to an upwind state. The wind shear event transpired at an altitude of 250 m from 14:42 to 18:13, with a duration of approximately 3.5 h (211 min). The first half of the wind shear event substantially corresponded with the aircraft flight reports (light purple shaded area in the figures), whereas no aircraft flight reports were transmitted in the second half.
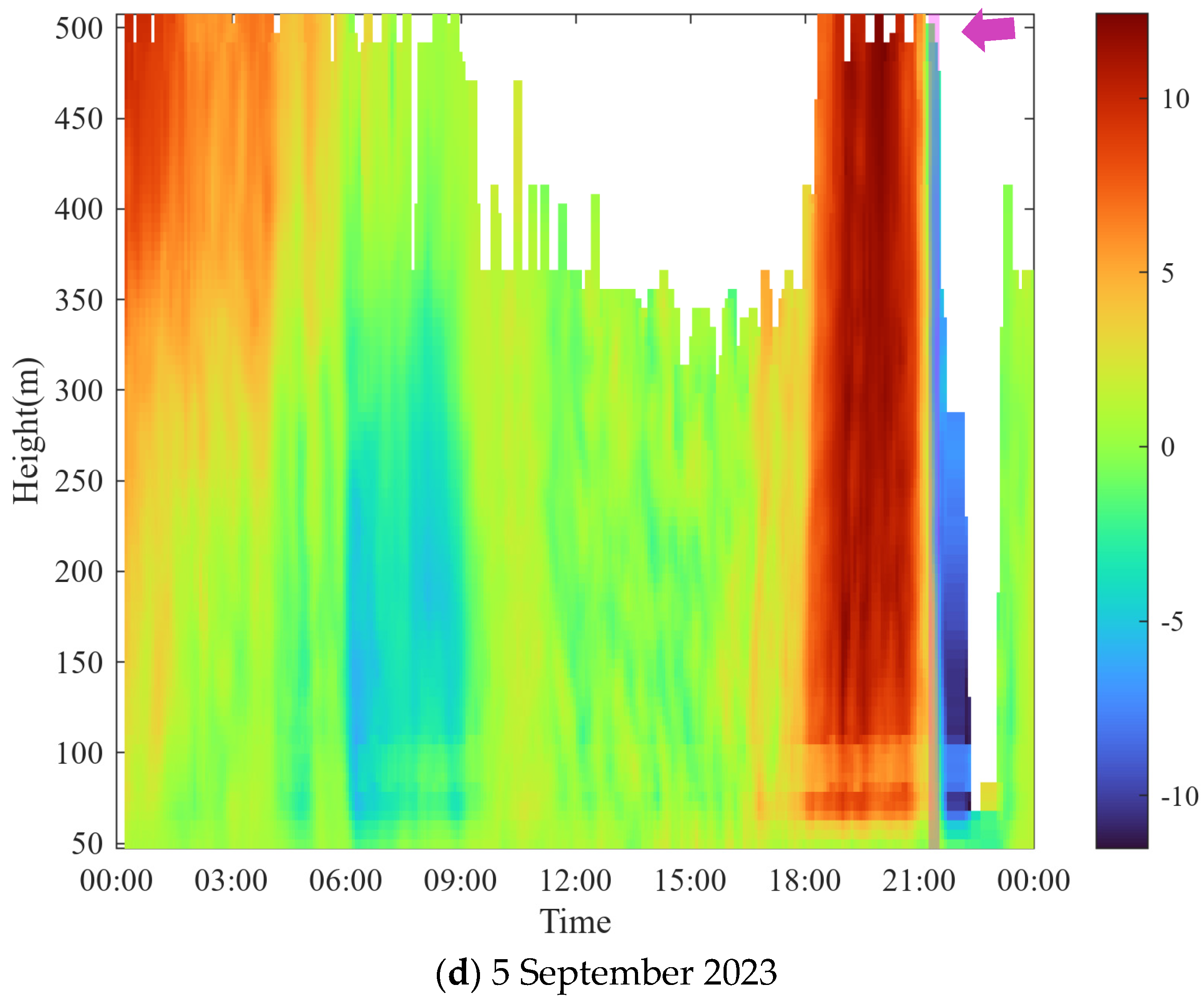
Similarly, this study processed headwind profile variations for three additional cases, as depicted in
Figure 8. On 10 April 2023, the vocal reports occurred prior to a sudden change in wind direction, whereas on 19 April 2023, they happened after such a change. In the case of 5 September 2023, the reports coincided with the wind direction shift. Analysis of the vocal reports, combined with the findings, suggests two reasons for these occurrences. First, the wind field is mobile; wind shear can enter and exit the detection range (this point is preliminarily confirmed in
Figure 8). Second, the location of the vocal reports does not necessarily fall within the detection range or even in the vicinity of the airport.
5.2. Headwinds from Different Algorithms
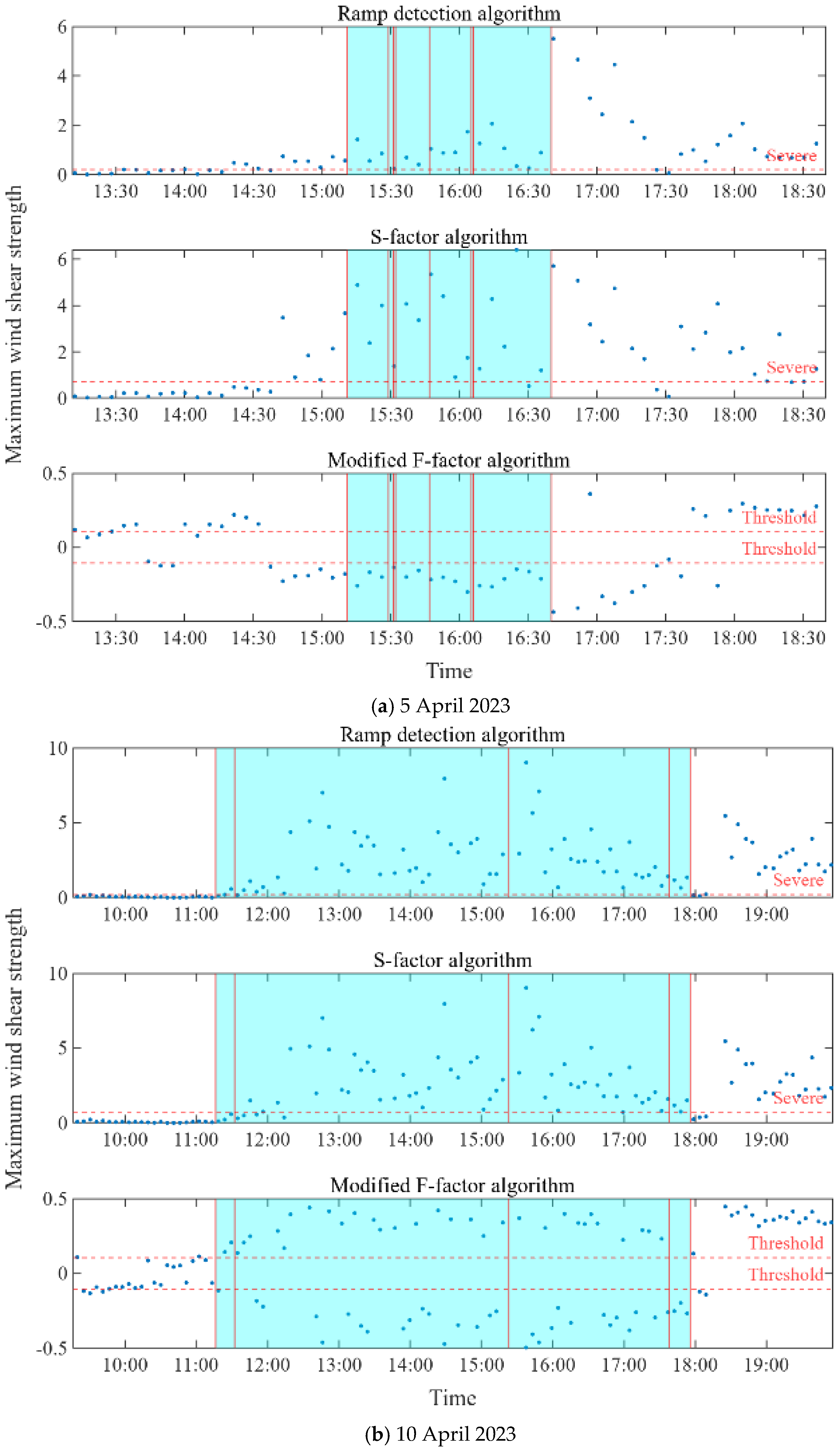
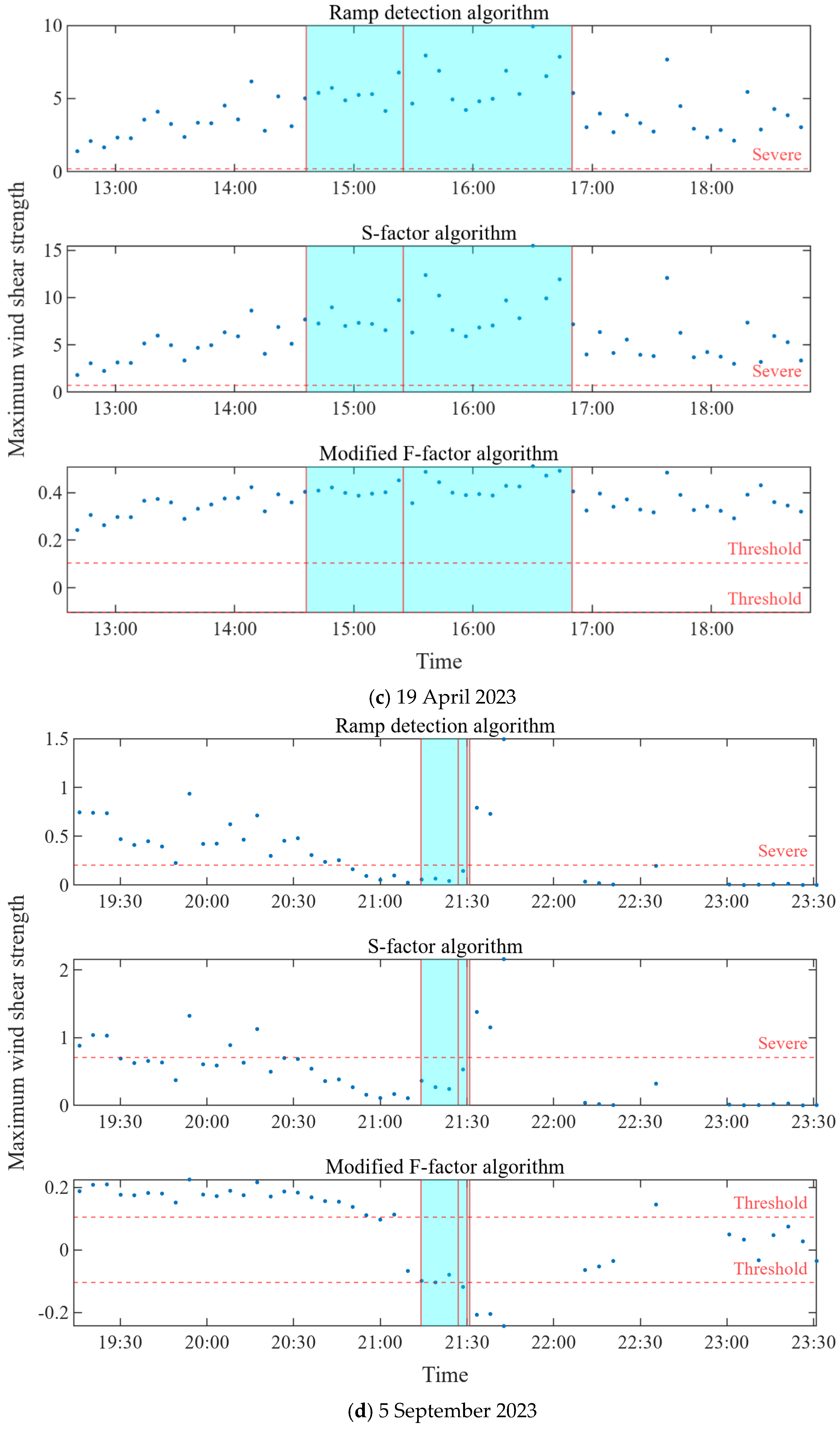
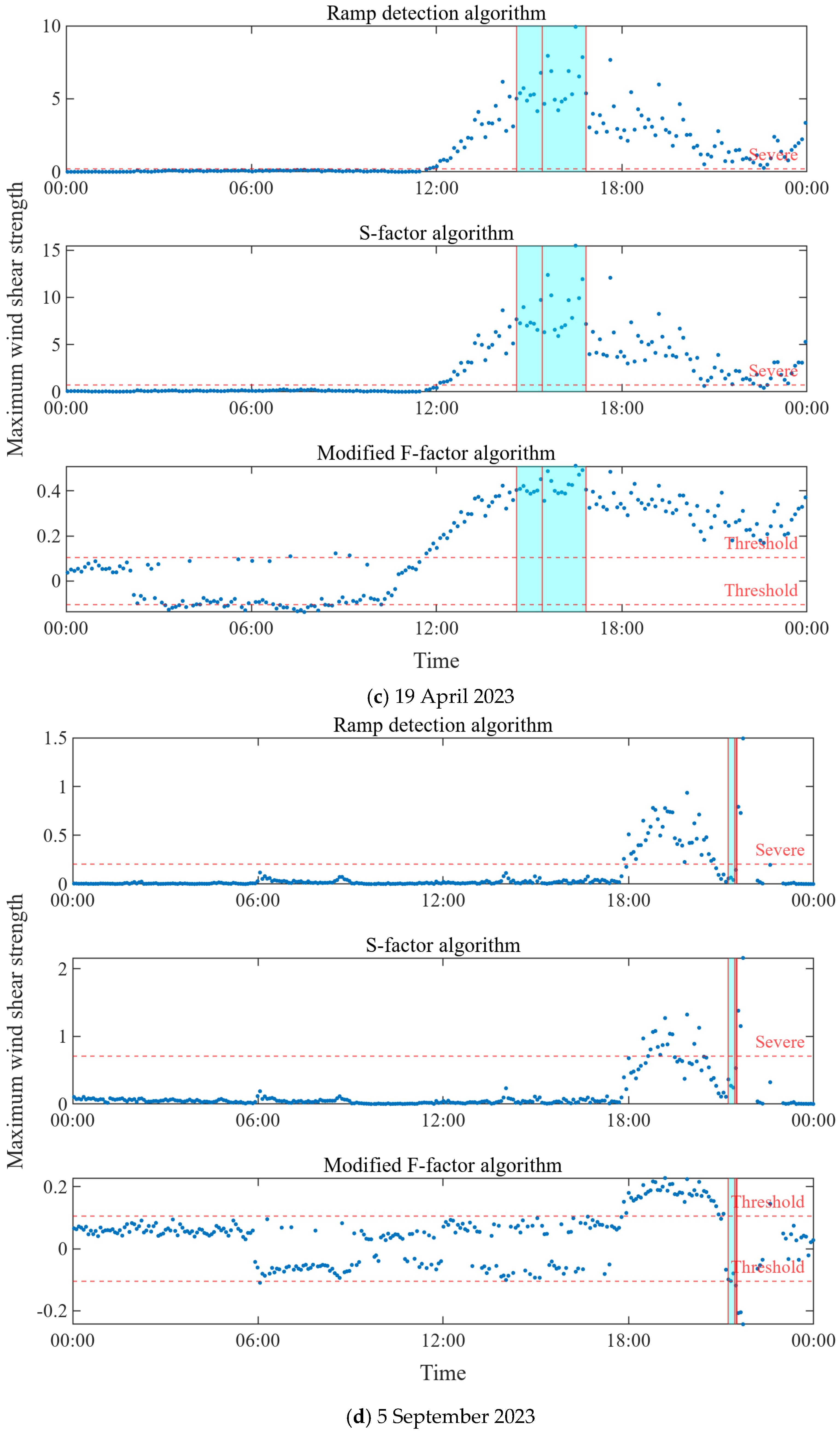
The headwind profile was comprehensively analyzed through the utilization of the three wind shear recognition algorithms, as illustrated in
Figure 9, and the blue-shaded segment represents the aircraft voice reports. In
Figure 9a, before 14:00, it was ascertained that the shear values computed by both the single slope algorithm and the S-factor algorithm principally resided below the predefined severity level. Concurrently, the values of the modified F-factor were mainly located in the positive direction and exceeded the established threshold. Significantly, when the aircraft voice reports were transmitted, the maximum shear values obtained from both the single slope algorithm and the S-factor algorithm surpassed the threshold, and these values were substantially higher than the maximum shear values documented in the preceding period. The performance in the other three cases is also similar. In contrast, within the same time interval, the modified F-factor was predominantly in the negative direction and exceeded the threshold. This discovery was in consonance with the experimental outcomes procured by P.W Chan, thereby further corroborating that the negative F-factor demonstrates enhanced performance in wind shear alerts in comparison to the positive F-factor. However, we observed that the aforementioned situation was not as evident in the case of 5 September 2023. By examining the algorithm detection results for the case on that day, as depicted in
Figure 10, the times of the reports for cases (a), (b), and (c) all fall within the periods when the detection results of the three algorithms exceeded the threshold, while case (d) occurred afterward. Nevertheless, both the vocal reports and the detection algorithms confirmed the presence of wind shear.
It was discerned that for a considerable period following the issuance of the aircraft voice report alert, the results produced by the three algorithms did not experience significant alterations. The potential cause for the lack of wind-shear-related aircraft voice reports during this phase could plausibly be ascribed to the modification of the landing runway, specifically, the employment of runway 29 for landing. This alteration of the landing runway might have instigated diverse wind conditions and interactions, which subsequently influenced the occurrence and reporting of wind shear events. A meticulous exploration of such factors and their ramifications is essential for a more in-depth comprehension of the nexus between wind shear detection algorithms, actual wind shear manifestations, and the corresponding reporting procedures in the context of aviation safety.
5.3. Wind Shear Strength from Different Algorithms
In consideration of the gusty characteristic of the wind, a sliding average of the three adjacent instantaneous winds was employed to compute the head-on wind profile of the glide path.
Figure 8 illustrates the variation of the maximum shear values over the time interval. The maximum shear values for both the slope detection algorithm and the S-factor algorithm were within the severe range, and the maximum shear values for the modified F-factor algorithm were within the negative threshold range. A slight variation was discerned in the results, and the three algorithms exhibited a high degree of consistency. Based on the outcomes of the analysis in
Figure 8,
Figure 9 and
Figure 10, the results generated by the three algorithms can be utilized to assess the occurrence of wind shear with a high level of reliability.
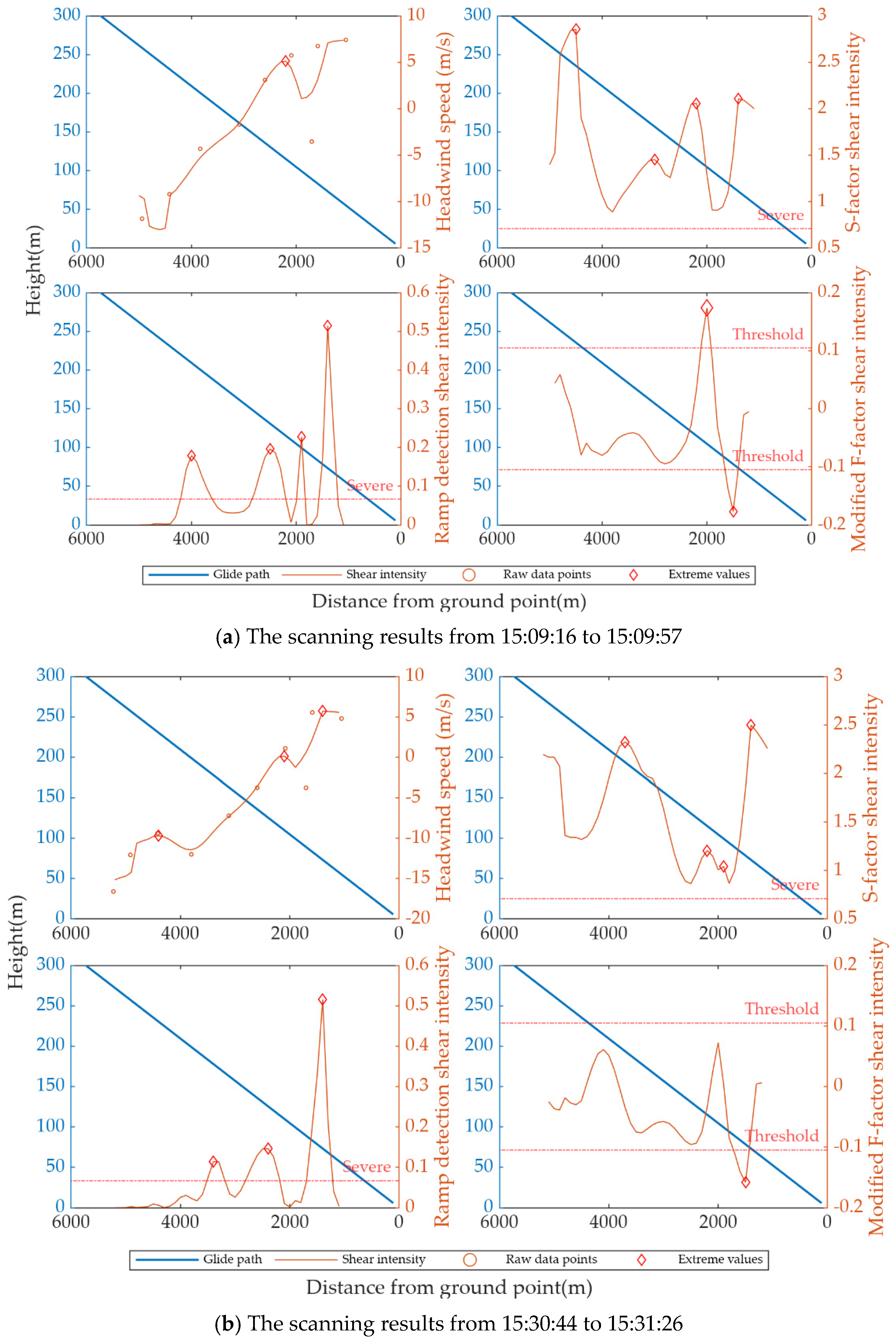
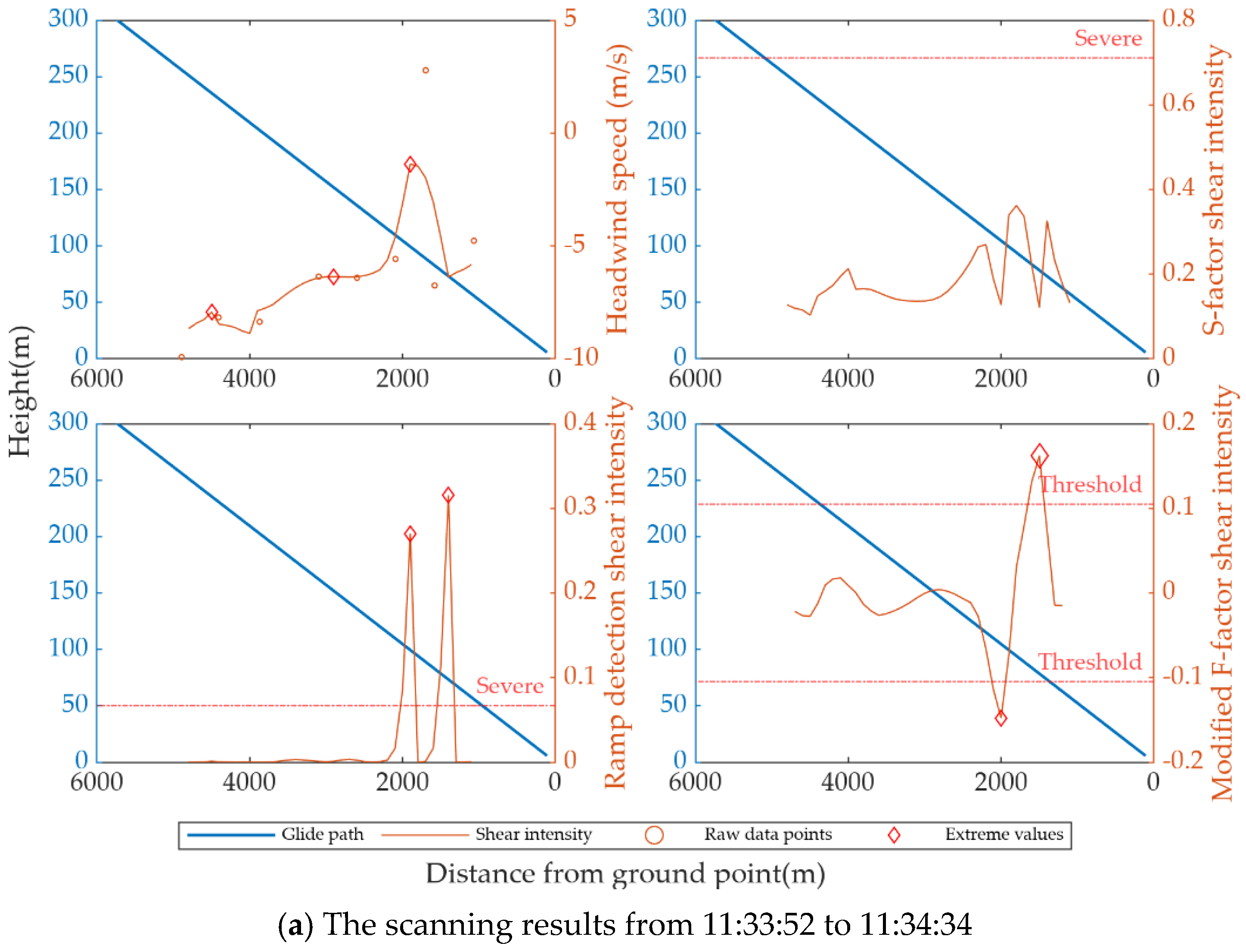
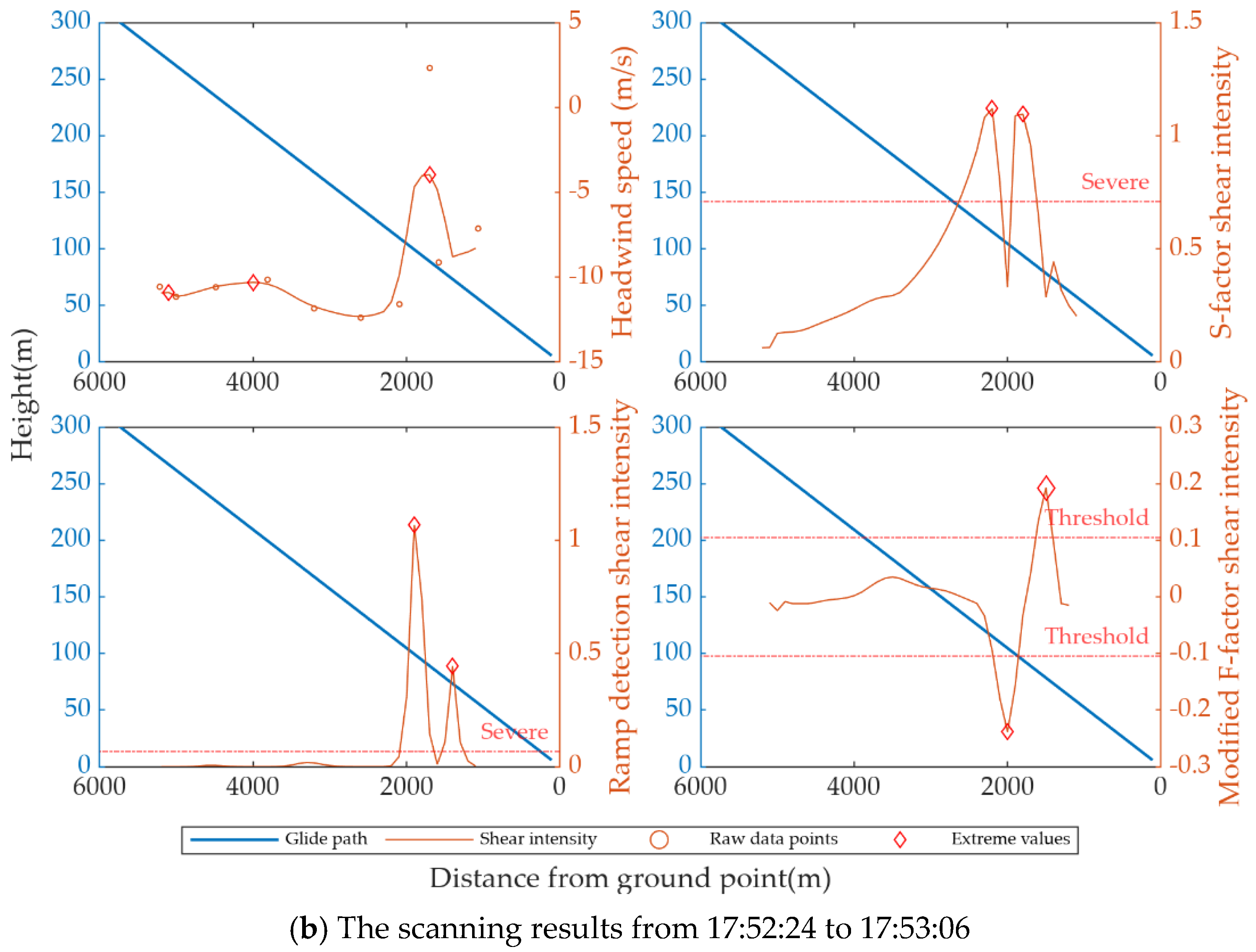
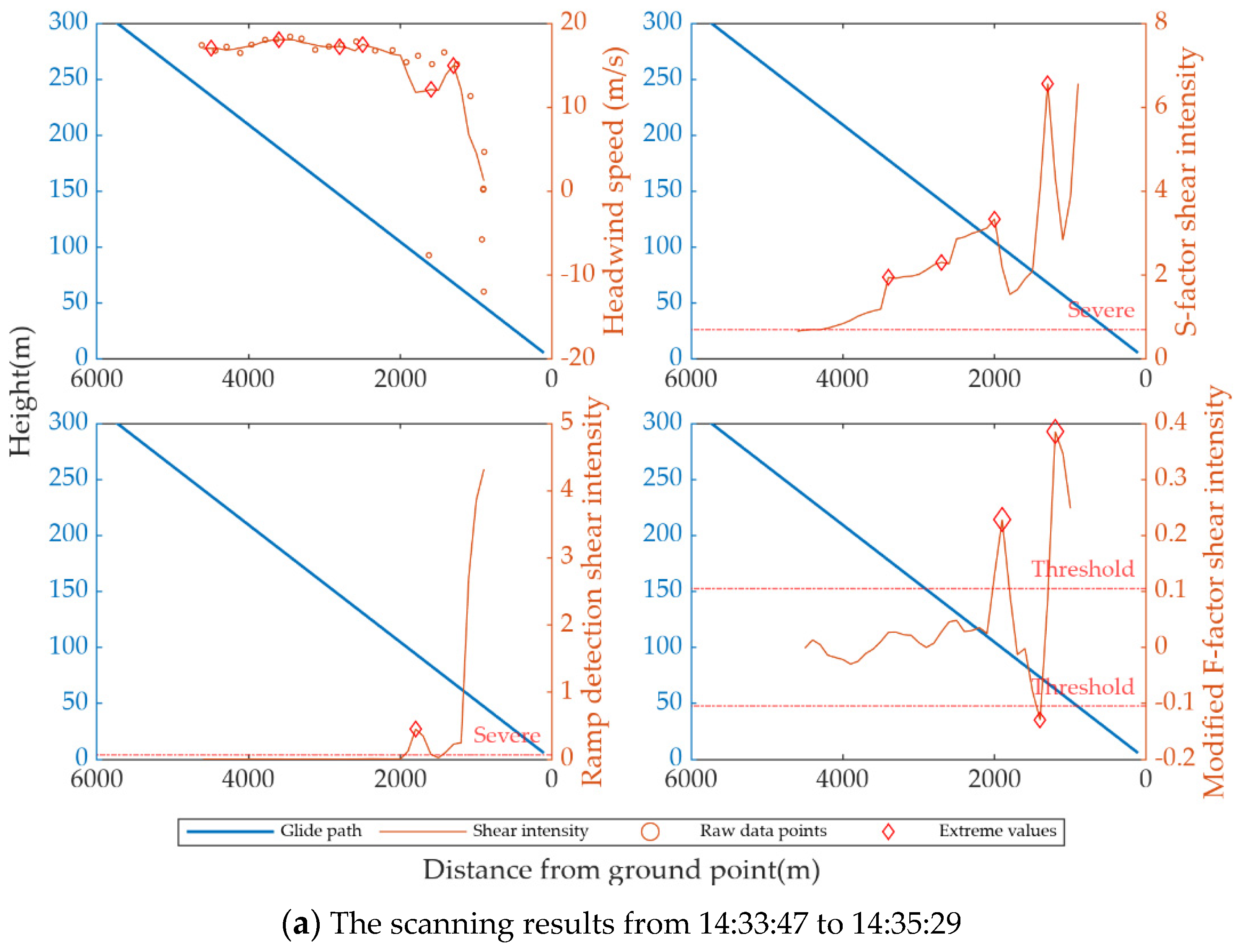
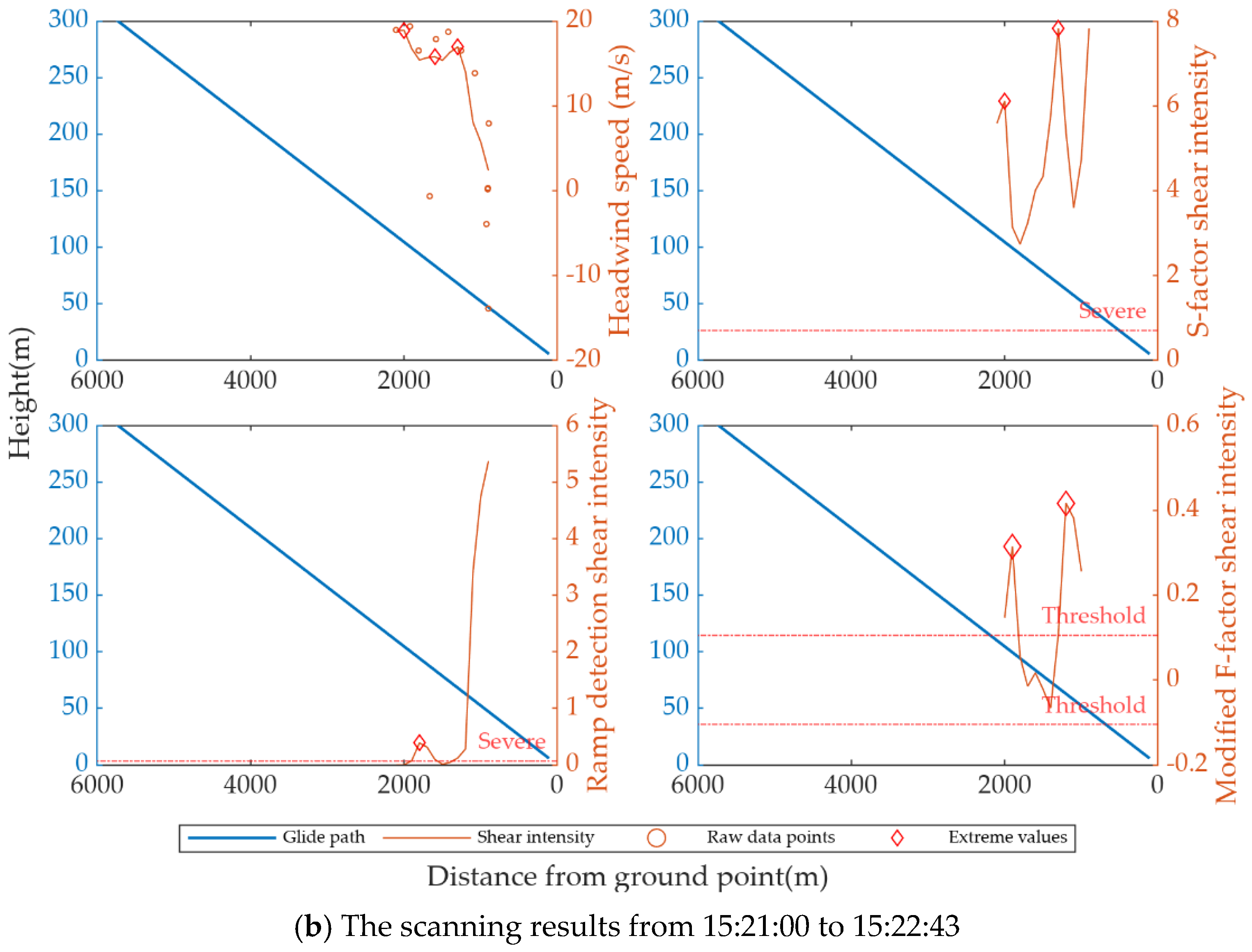
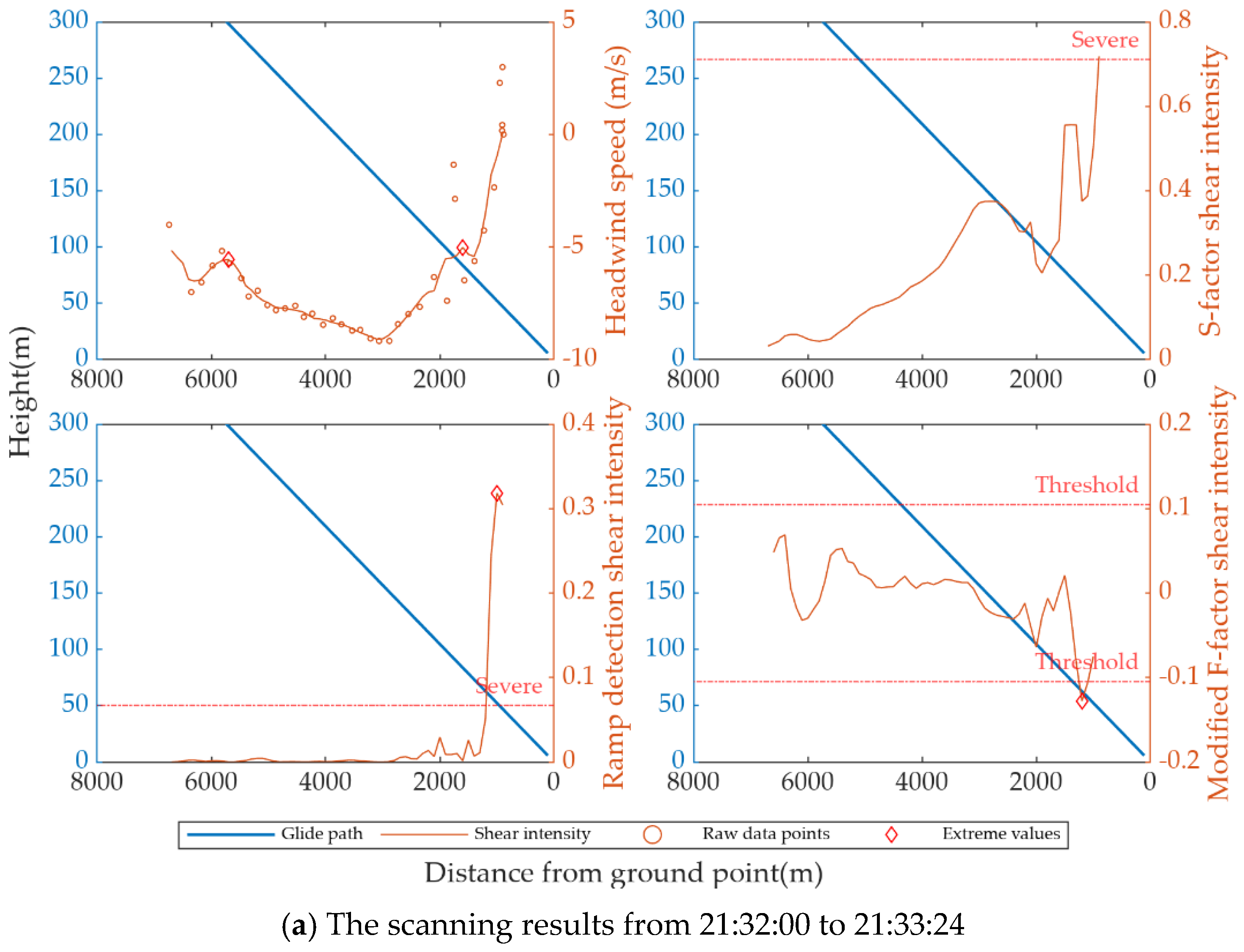
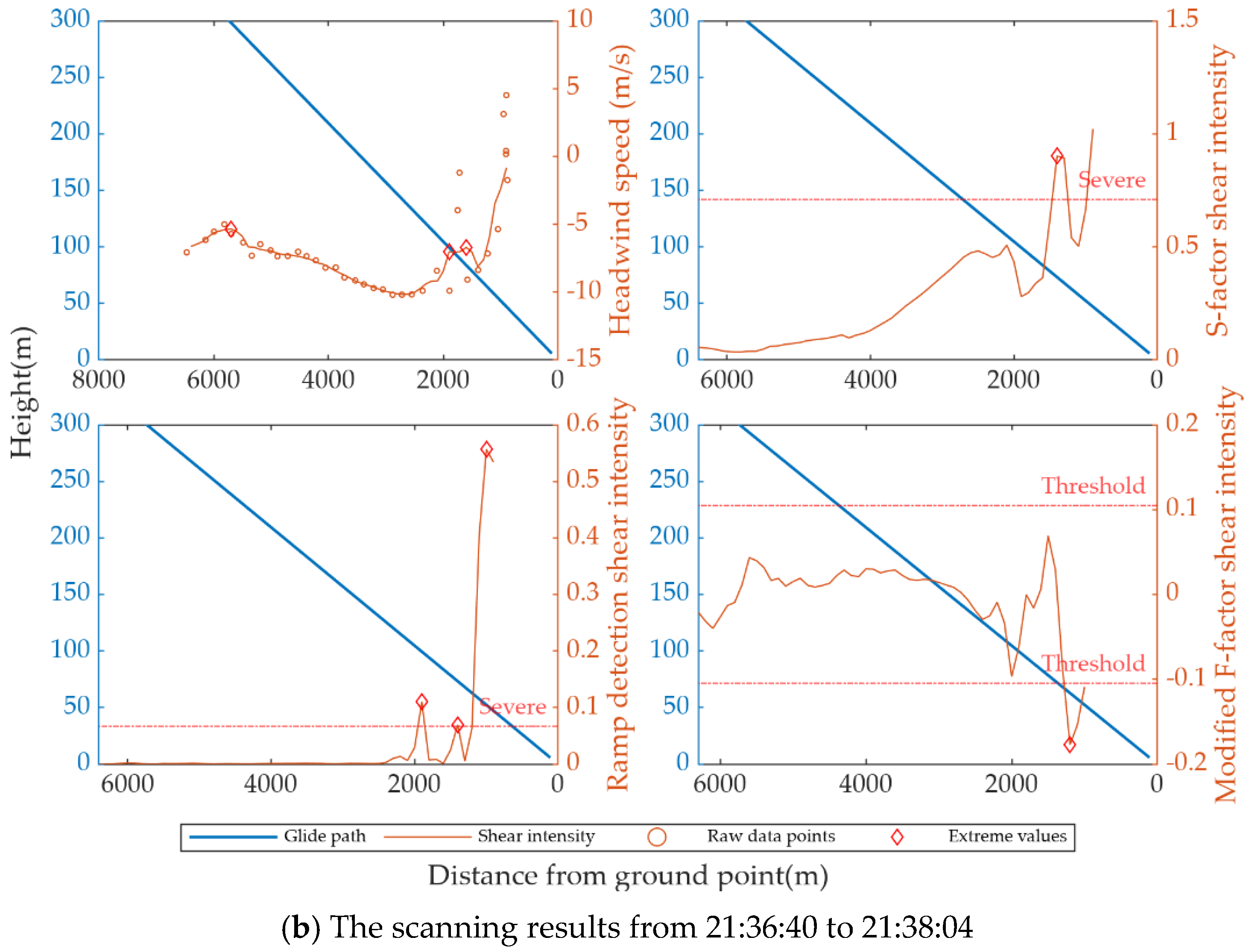
The three instances of wind shear, which were communicated via aircraft voice reports within the Lidar measurement range, were subjected to further analysis with the aim of clarifying the relationship between the head-on wind speed and the variation in the shear values yielded by each algorithm at diverse locations along the slope. In accordance with the data processing procedure detailed in
Section 3.1, the SP scan observations that were closest to the time when the aircraft voice report was issued were chosen for analysis. These observations were all conducted within 5 min of the voice report, as depicted in
Figure 11,
Figure 12,
Figure 13 and
Figure 14. The three wind shear algorithms were employed to conduct further analyses. Regional extreme points are denoted in each figure with the intention of facilitating a comparison of the results obtained from different algorithms, as illustrated in
Figure 11,
Figure 12,
Figure 13 and
Figure 14.
- (1)
When comparing the headwind profile of the glide path along the aircraft landing direction (ranging from high to low altitude), it was observed that the wind gradually transitioned from a downwind state to an upwind state. In these results, more than two algorithms consistently detected values exceeding the prescribed thresholds, thereby validating the effectiveness of considering the detection results from these algorithms as a basis for issuing alerts.
- (2)
The three wind shear algorithms did not exhibit complete consistency, as deviations were manifested in the locations of the extreme values. Consequently, the application of a single algorithm might lead to insufficient accuracy in detecting wind shear. Given that the atmosphere possesses a certain degree of continuity, a comprehensive assessment should be made based on the observation results to enhance the accuracy.
6. Conclusions
In this present study, an in-depth and comprehensive exploration was carried out regarding the low-level wind shear process instigated by frontal passage. Through the utilization of the headwind profile data of the glide path, which were obtained from the SP scanning mode, and the application of three wind shear recognition algorithms, with the aircraft voice reports being adopted as the reference true values, the effectiveness of the three algorithms is verified.
Firstly, the comparison between the results generated by the three algorithms and the aircraft voice reports substantiated the feasibility of these algorithms in detecting wind shear events that might potentially affect aircraft. This multi-algorithm strategy offers a more reliable and sturdier framework for wind shear identification, facilitating a more exhaustive and comprehensive evaluation from diverse algorithmic viewpoints. Secondly, it was ascertained through the utilization of the three disparate algorithms that wind shear events could assuredly be detected, notwithstanding the fact that the results procured from these algorithms were not completely congruent. Such variations underscore the intricacy and variability that are intrinsically associated with wind shear detection, thereby accentuating the necessity of comprehensive understanding and integration of multiple algorithmic outcomes. Furthermore, a significant characteristic of wind shear, namely, its persistence, was disclosed. As manifested by the scanning outcomes, wind shear events were determined to persist within the scanning range for a particular duration, either as spatial translocation or temporary vanishing in the temporal realm. This revelation augments our comprehension of the dynamic essence of wind shear and bears consequences for its precise surveillance and prognostication.
Nevertheless, it ought to be noted that the present study was circumscribed to a solitary sample of wind shear events within the context of frontal passage. Future research initiatives will be centered around incorporating a more extensive array of cases, amalgamating the detection capabilities of multiple scanning modalities, and augmenting wind shear prediction. It is anticipated that the combined outcomes of the three algorithms can function as a more advantageous and dependable criterion for wind shear warning. Weighting the alarm results of multiple algorithms as the basis for warning would be a good strategy, but further experimentation is needed to determine the effectiveness. In total, this study not only amplifies our understanding of wind shear processes but also establishes a bedrock for further research and practical applications in alleviating the risks correlated with wind shear within the context of aviation.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}