
Multipath Effects Mitigation in Offshore Construction Platform GNSS-RTK Displacement Monitoring Using Parametric Temporal Convolution Network


Abstract
1. Introduction
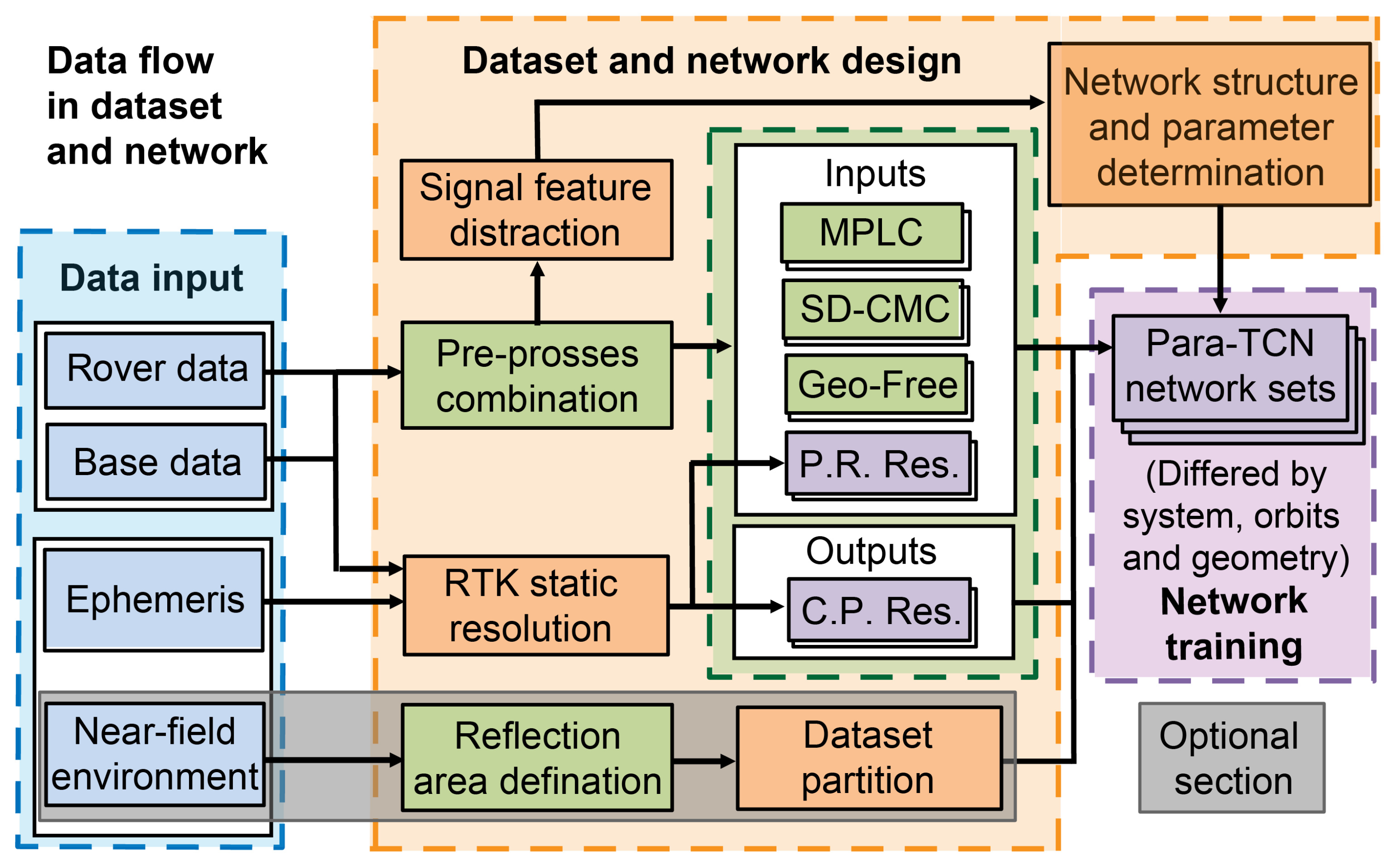
- Section 2 conducts a systematic analysis of the generation mechanism of multipath signals within offshore construction platform environments, linking multipath signatures to structural geometries present in near-field environments. By systematically processing pseudorange and carrier phase signals collected from GNSS receivers, one could derive analytical expressions for the network inputs parameters under constrained dual-frequency/dual-station configurations. After formulating those observations into dataset, based on rigorous characterization of multipath propagation, we presented the neural network employed for multipath prediction, accompanied by detailing the architectural selections for network layer configurations and hyperparameters.
- Section 3 quantitatively evaluates the effectiveness of our neural network predictions, demonstrating the multipath mitigation performance across test subsets with signal-domain metrics including temporal distribution analysis and spectral power quantification, yielding a holistic validation framework.
- Section 4 systematically examines dataset preprocessing/normalization strategies, explainable of network parameter settings, andreflection-source-informed skymap segmentation.
2. Materials and Methods
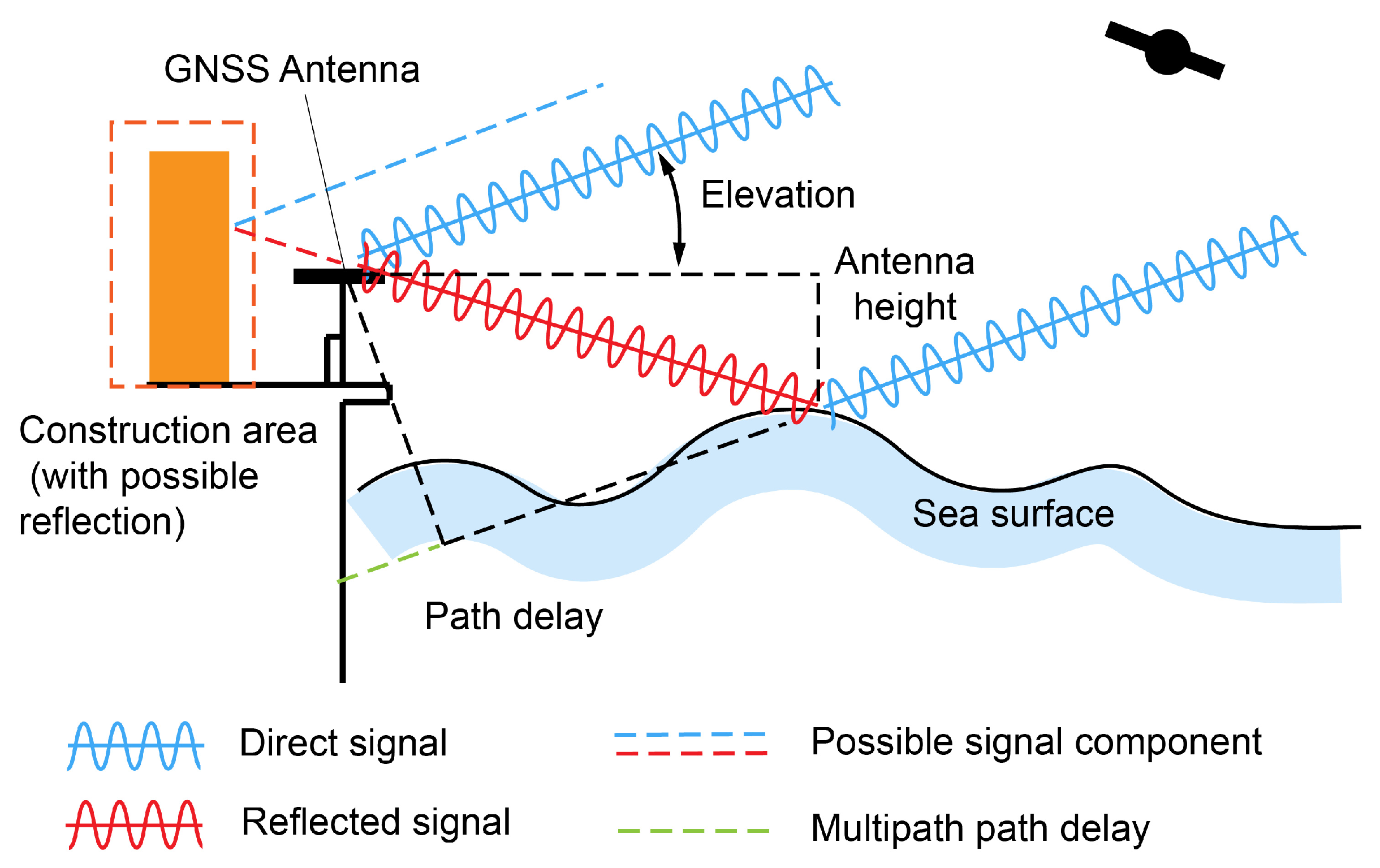
2.1. Geometry of GNSS Multipath Effect
2.2. GNSS Observation and Multipath Dataset
2.2.1. GNSS Observation
2.2.2. Multipath Observation Dataset
2.2.3. Real-Time Code-Aided Multipath Mitigation
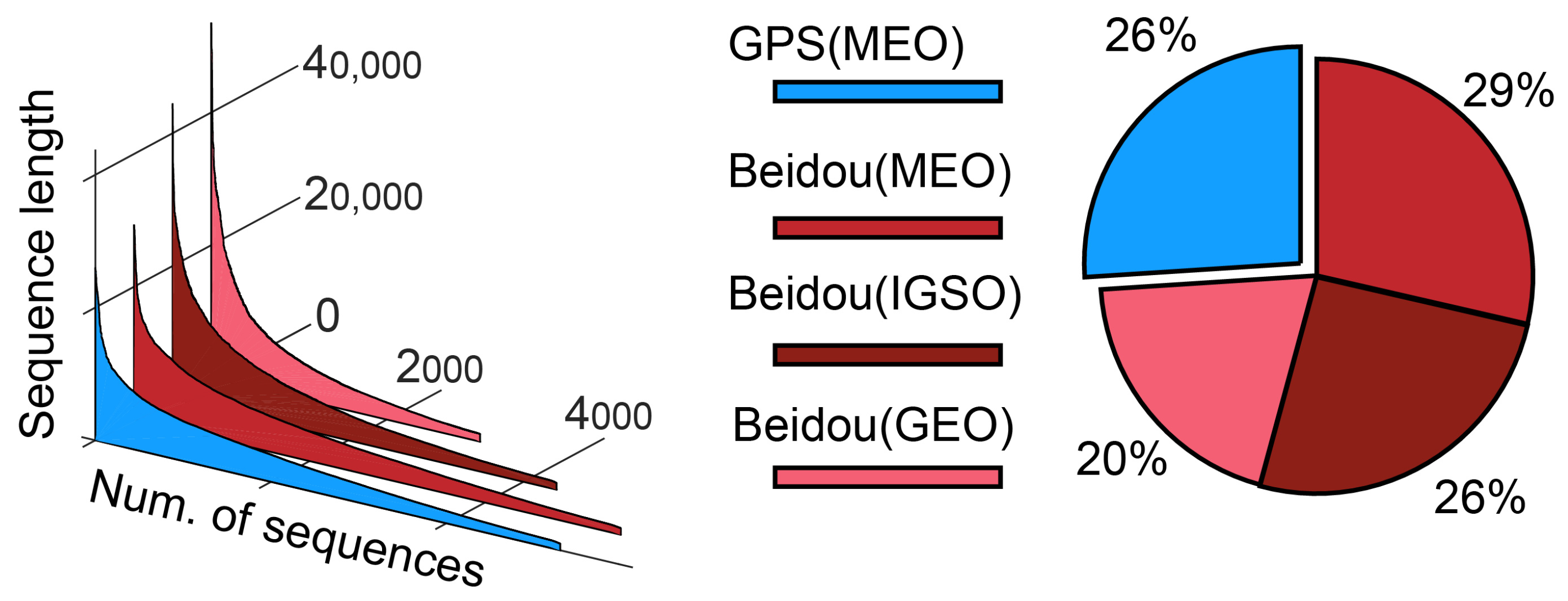
2.3. Dataset Acquisition and Data Property Driven Partition
2.4. Data Sources and Reliability
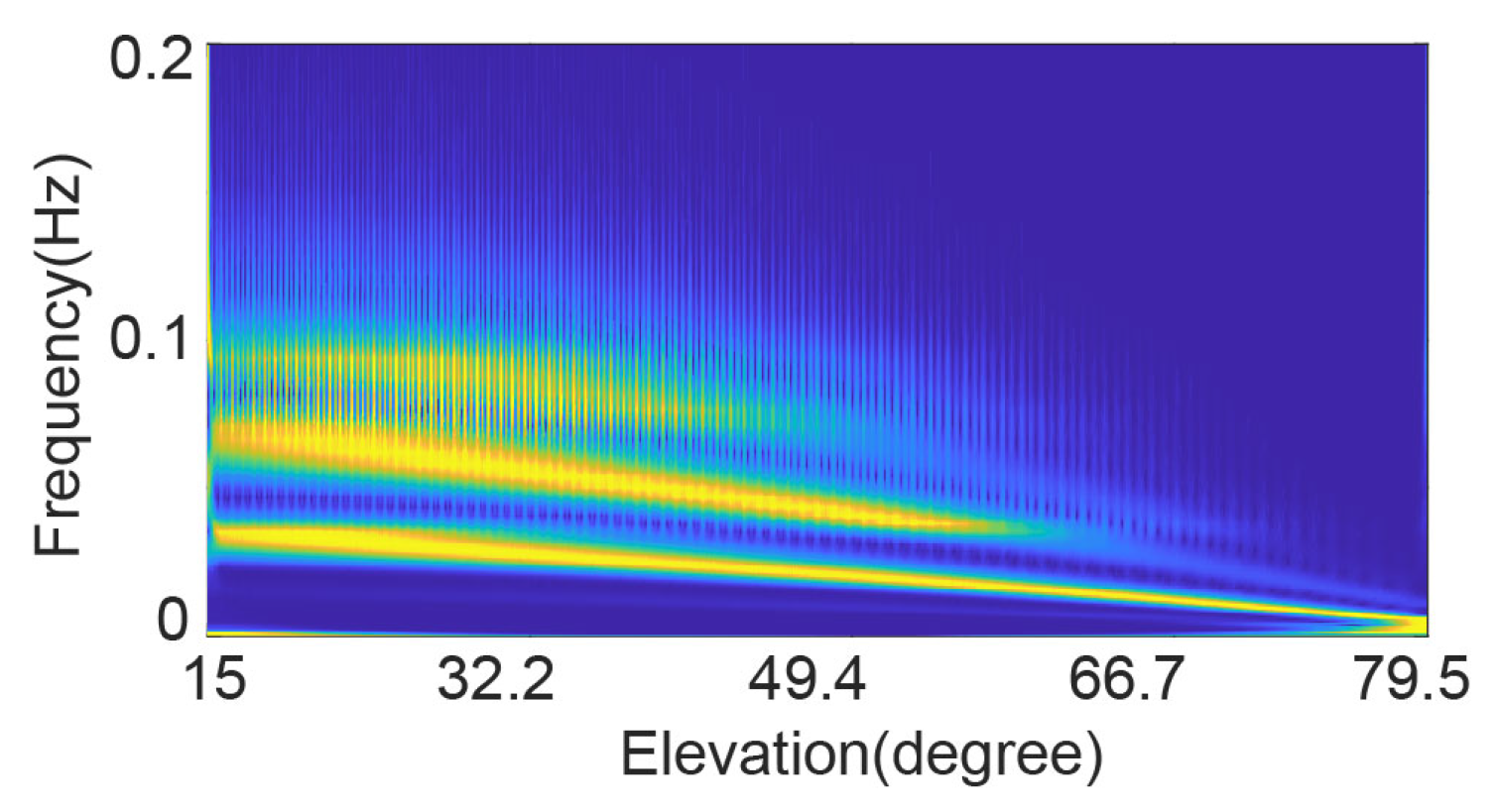
2.5. Characteristics of GNSS Multipath
2.6. Parallel Temporal Convolution Network
- Causal convolution, where the output at a given time step can only be calculated using information from previous time steps.
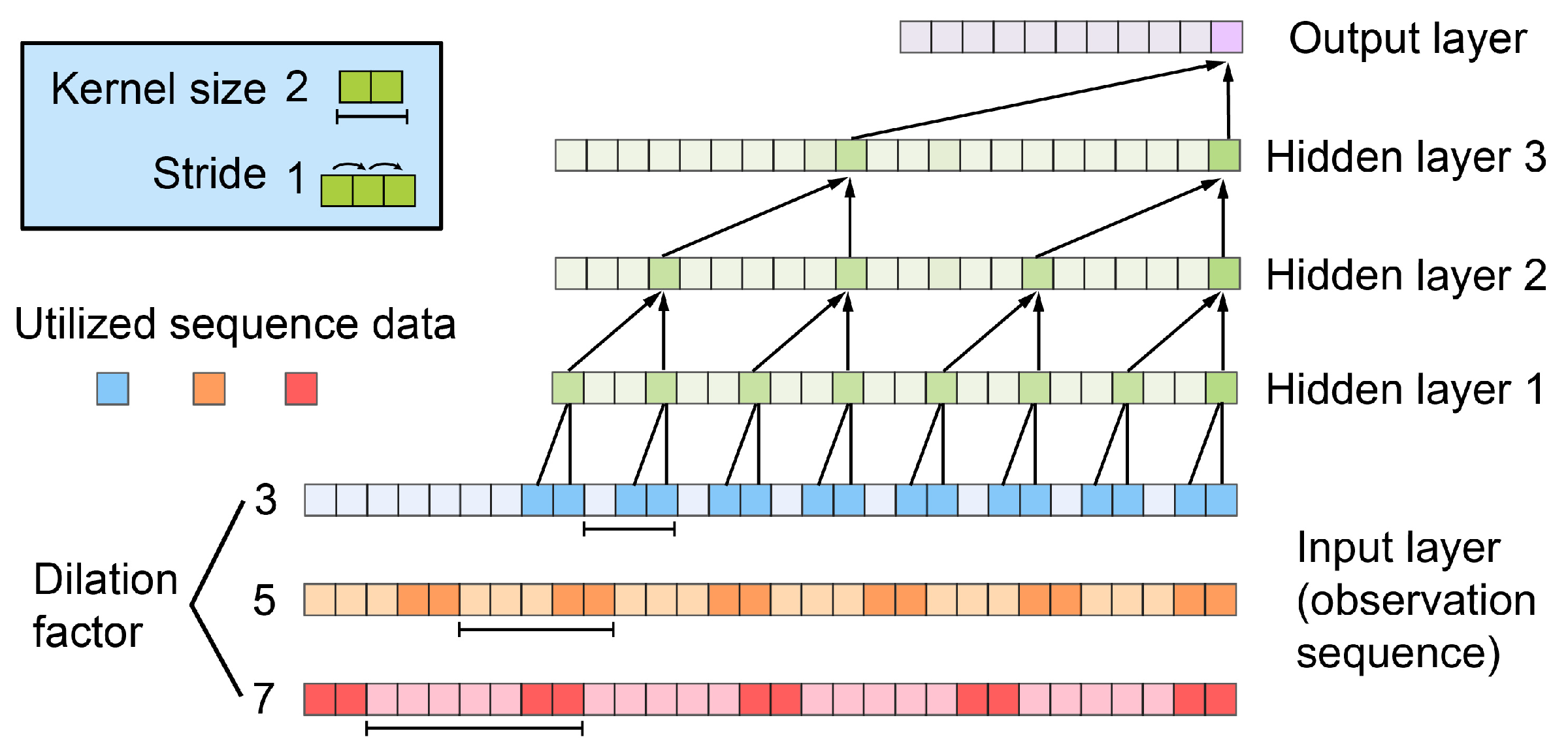
- Dilated convolution, which expands the receptive field by adjusting the dilation factor of the convolution kernel, allowing a single convolution kernel to capture features from longer sequences.
- Interpretability, that whether a node is being used or not can be obtained through the inverse inference of the network structure, and the data flow within the network can be finely modeled.
2.7. Network Structure Design
3. Results
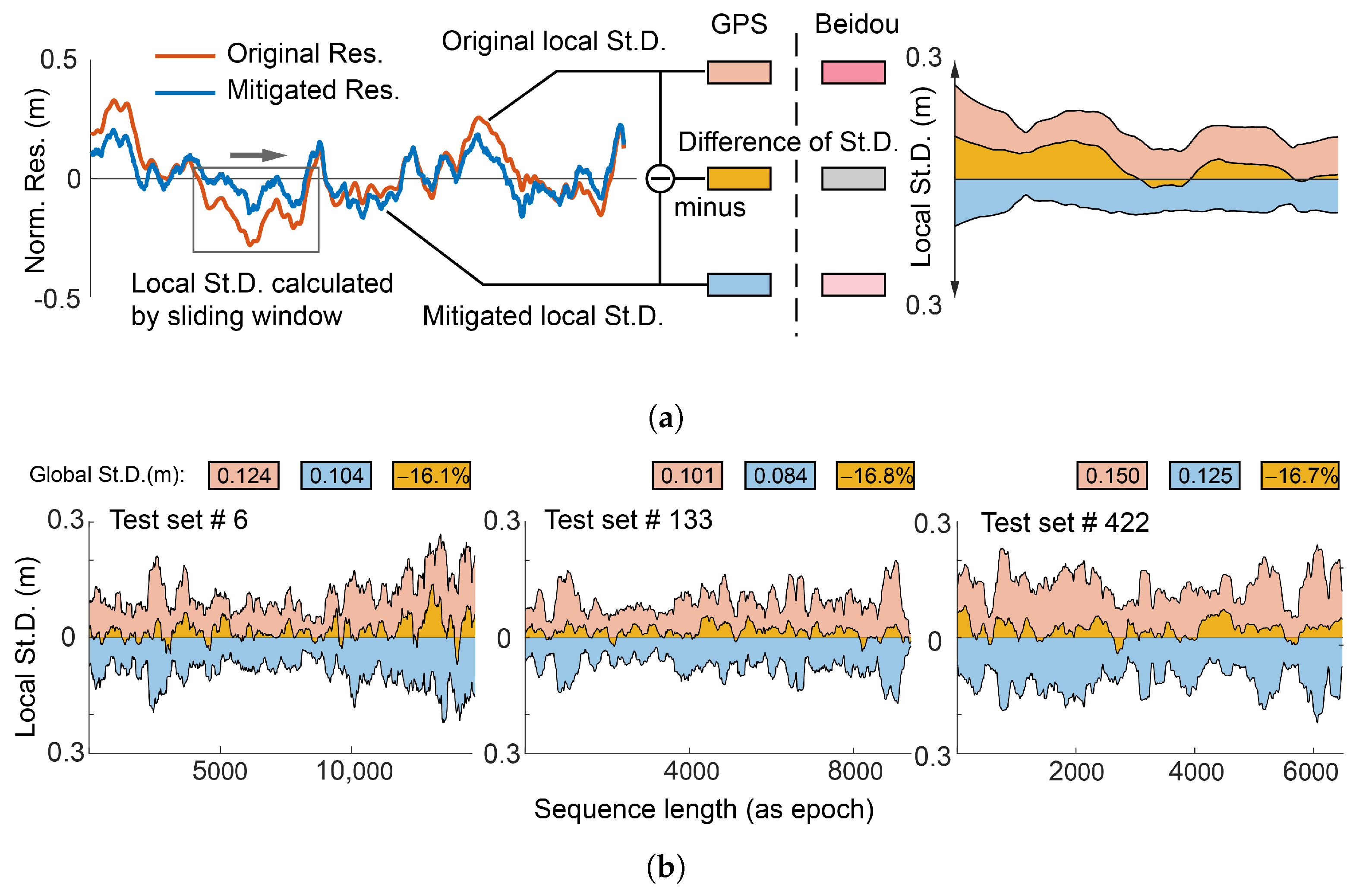
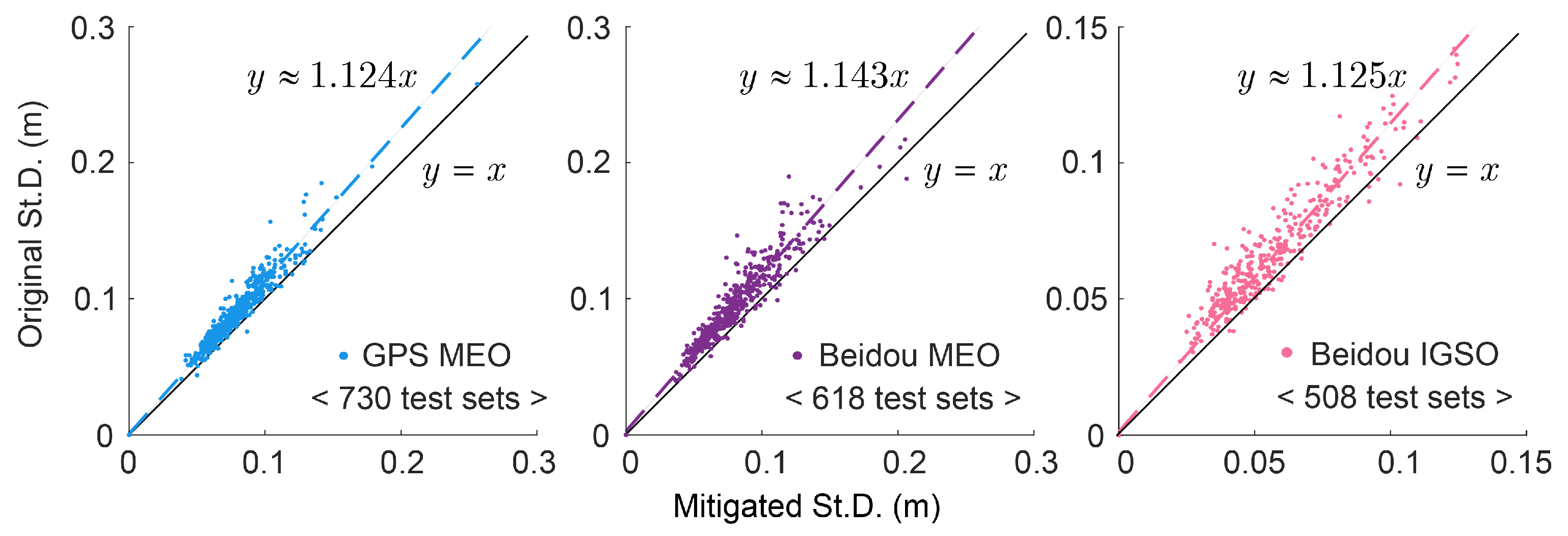
3.1. Multipath Mitigation for Individual Satellite
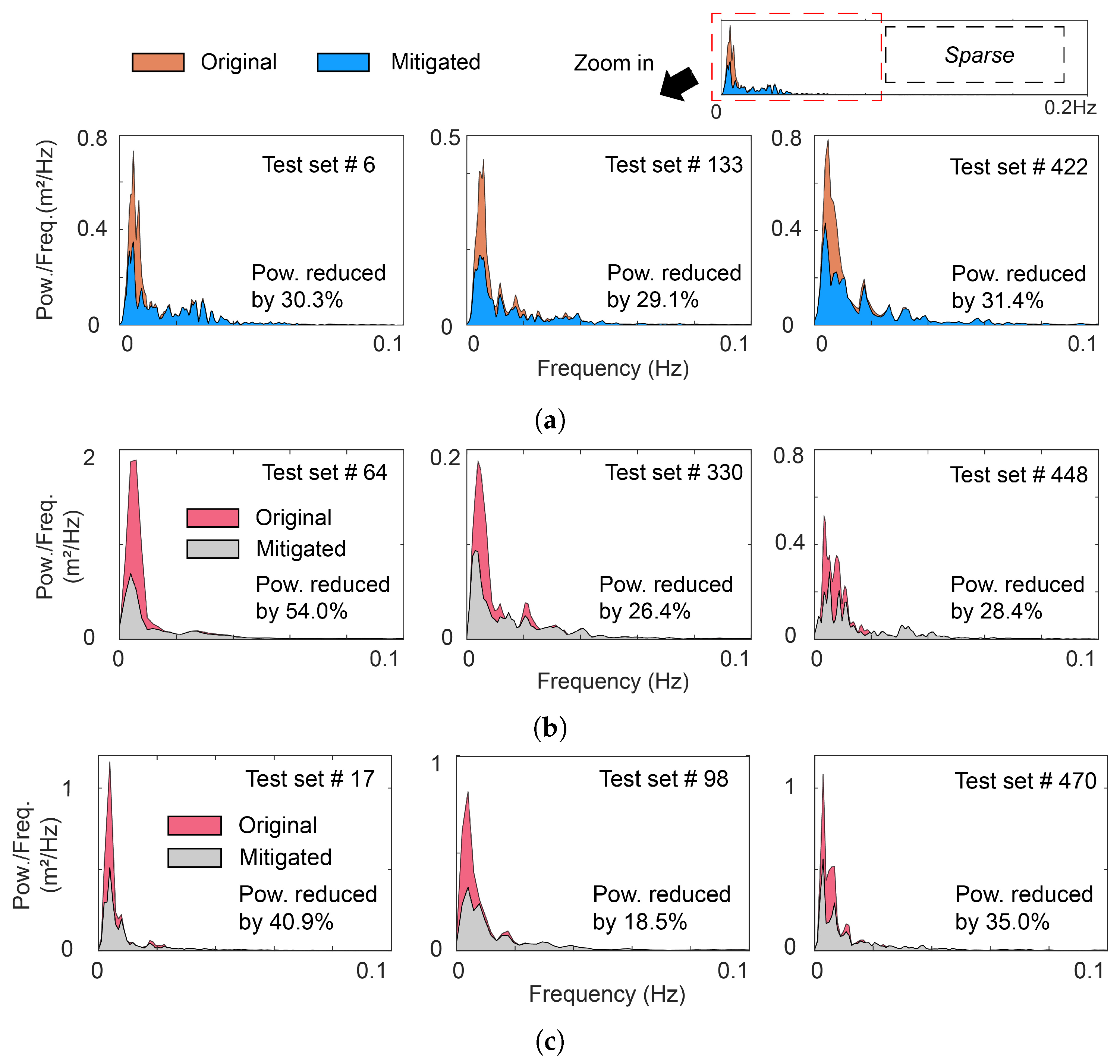
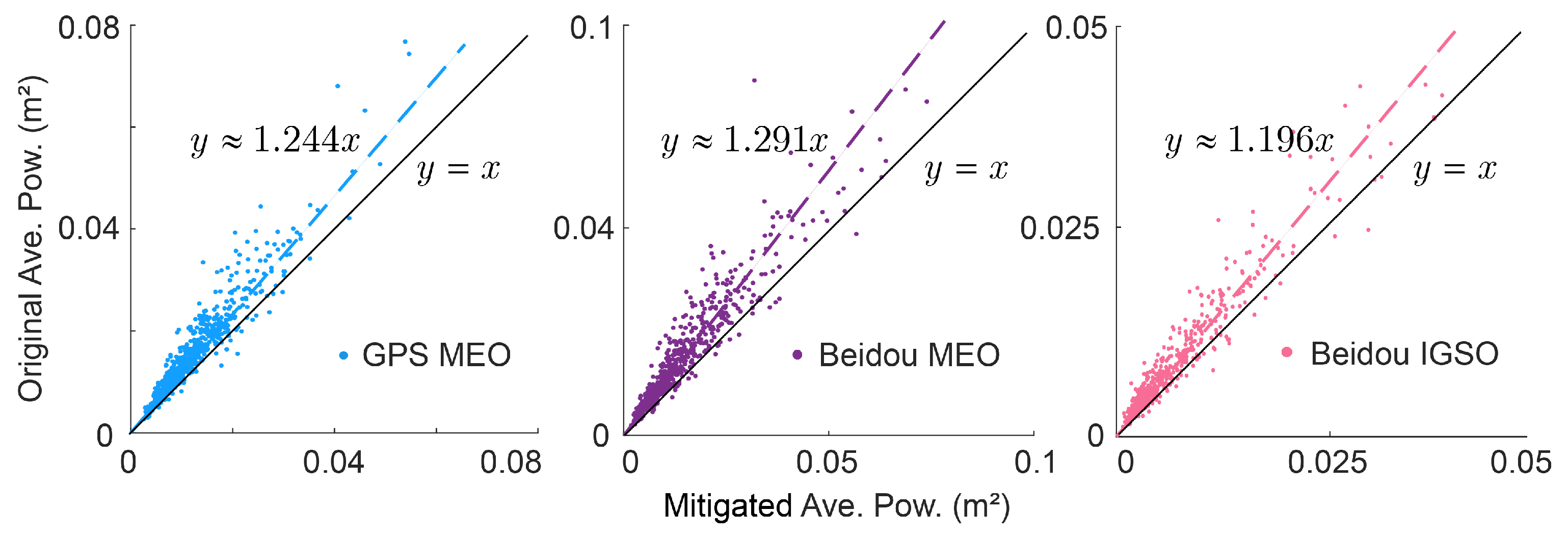
3.2. Power Spectral Density for Mitigated Sequences
3.3. Positioning Results
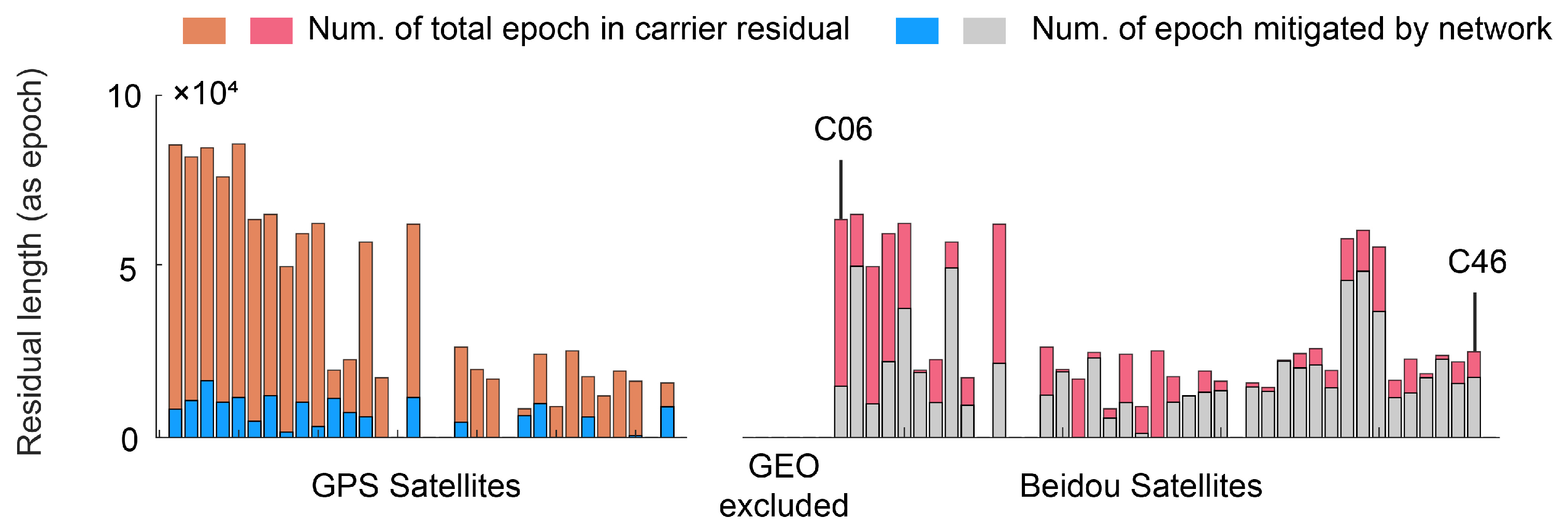
- Due to the network’s stringent requirement for data continuity, only a minor set of the satellite residuals were corrected by the network (as shown in Figure 13). As a result, the improvement in St.D. of the positioning data is less pronounced than that of individual sequences.
- The three-dimensional positioning results underwent sliding mean normalization to align with the dataset’s normalization process (as illustrated in Section 4.3).
- The positioning utilized single-differenced (SD) carrier phase residuals derived from the restoration process (as illustrated in Section 4.1), resulting in a significantly better distribution of solutions compared to using double-differenced (DD) residuals.
4. Discussion
4.1. Dataset Preprocessing
4.2. Geometry-Based Dataset Segmentation
4.3. Data Normalization
4.4. Network Structures Design
5. Conclusions
- Comprehensive statistical analysis was performed on GNSS data collected throughout the construction period from maritime platform devices. Theoretical multipath characteristics were derived through geometric analysis, supplemented by shore-based station correction data, resulting in a robust multipath observation dataset (spanning five months, with approximately 93 days of epochs). These datasets have initially demonstrated validity in subsequent network training, and we have reserved the task of delineating air-space maps based on reflection sources for future researchers to conduct more refined studies.
- We identified the primary frequency bands of multipath signals based on the environmental context of this paper. Based on the strong interpretability of the Temporal Convolution Network (TCN), we selected multiple distinct dilation factors to construct a multi-channel parallel para-TCN network for real-time prediction of multipath effects. Since our input data are all collected before RTK processing, it could avoid the influence of real-time processing errors on the network’s performance. The datasets utilized are geometrically independent observations, while networks extracts the real-time variations in multipath caused by structural dynamic displacements through small-dilation TCN backbones and captures the frequency continuity of multipath effects in the low-frequency range through large-dilation backbones, thus holding potential for structural dynamic monitoring.
- Validation employed a 90%/10% dataset split. Results demonstrate residual standard deviation suppression between 12.4% and 14.3%, with average signal power reduction ranging from 19.6% to 29%. Post-processing distribution improvements were observed in nearly all cases, with minimal instances of degradation, confirming the network’s robustness and accurate multipath characteristic identification capability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite System |
| para-TCN | parametric Temporal Convolution Network |
| RTK | Real-Time Kinematic |
| SNR | Signal-Noise-Ratio |
| AR | Ambiguity Resolution |
| MHM | Multipath Hemispherical Map |
| SF | Sidereal Filtering |
| CMC | Code-Minus-Carrier |
| SD | Single-differenced |
| DD | Double-differenced |
| MPLC | Multipath Linear Combination |
| BOC | Binary Offset Carrier |
| BPSK | Binary Phase Shift Keying |
| GEO | Geosynchronous Equatorial Orbit |
| IGSO | Inclined Geosynchronous Orbit |
| MEO | Medium Earth Orbit |
| DWT | Discret Wavelet Transform |
| CWT | Continuous Wavelet Transform |
| PSD | Power Spectral Density |
| ASP | Average Signal Power |
| RMS | Rooted-Mean-Square |
References
- Meng, X.; Xi, R.; Xie, Y. Dynamic characteristic of the forth road bridge estimated with GeoSHM. J. Glob. Position. Syst. 2018, 16, 4. [Google Scholar] [CrossRef]
- Wang, J.; Meng, X.; Qin, C.; Yi, J. Vibration Frequencies Extraction of the Forth Road Bridge Using High Sampling GPS Data. Shock Vib. 2015, 2016, 1–18. [Google Scholar] [CrossRef]
- Xi, R.; Chen, H.; Meng, X.; Jiang, W.; Chen, Q. Reliable Dynamic Monitoring of Bridges with Integrated GPS and BeiDou. J. Surv. Eng. 2018, 144, 04018008. [Google Scholar] [CrossRef]
- Xi, R.; Jiang, W.; Meng, X.; Chen, H.; Chen, Q. Bridge monitoring using BDS-RTK and GPS-RTK techniques. Measurement 2018, 120, 128–139. [Google Scholar] [CrossRef]
- Niu, Y.; Xiong, C. Analysis of the dynamic characteristics of a suspension bridge based on RTK-GNSS measurement combining EEMD and wavelet packet technique. Meas. Sci. Technol. 2018, 29, 085103. [Google Scholar] [CrossRef]
- Yi, T.H.; Li, H.N.; Gu, M. Experimental assessment of high-rate GPS receivers for deformation monitoring of bridge. Measurement 2013, 46, 420–432. [Google Scholar] [CrossRef]
- Yang, A.; Wang, P.; Yang, H. Bridge Dynamic Displacement Monitoring Using Adaptive Data Fusion of GNSS and Accelerometer Measurements. IEEE Sens. J. 2021, 21, 24359–24370. [Google Scholar] [CrossRef]
- Kaloop, M.; Li, H. Multi input–single output models identification of tower bridge movements using GPS monitoring system. Measurement 2014, 47, 531–539. [Google Scholar] [CrossRef]
- Han, H.; Wang, J.; Meng, X.; Liu, H. Analysis of the dynamic response of a long span bridge using GPS/accelerometer/anemometer under typhoon loading. Eng. Struct. 2016, 122, 238–250. [Google Scholar] [CrossRef]
- Cawley, P.; Adams, R. The Location of Defects in Structures from Measurements of Natural Frequencies. J. Strain Anal. Eng. Des. 1979, 14, 49–57. [Google Scholar] [CrossRef]
- Ge, L.; Han, S.; Rizos, C. GPS multipath change detection in permanent GPS stations. Surv. Rev. 2002, 36, 306–322. [Google Scholar] [CrossRef]
- Xi, R.; Xu, D.; Jiang, W.; He, Q.; Zhou, X.; Chen, Q.; Fan, X. Elimination of GNSS carrier phase diffraction error using an obstruction adaptive elevation masks determination method in a harsh observing environment. GPS Solut. 2023, 27, 139. [Google Scholar] [CrossRef]
- Wang, S.Y. Detection and Analysis of GNSS Multipath. 2016; pp. 1–3. Available online: https://www.diva-portal.org/smash/get/diva2:937141/FULLTEXT02.pdf (accessed on 2 February 2025).
- Kanhere, A.V.; Gupta, S.; Shetty, A.; Gao, G. Improving GNSS Positioning Using Neural-Network-Based Corrections. Navig. J. Inst. Navig. 2022, 69, navi.548. [Google Scholar] [CrossRef]
- Pugliano, G.; Robustelli, U.; Rossi, F.; Santamaria, R. A new method for specular and diffuse pseudorange multipath error extraction using wavelet analysis. GPS Solut. 2016, 20, 499–508. [Google Scholar] [CrossRef]
- Delgado, N.; Haag, M. Multipath analysis using code-minus-carrier for dynamic testing of GNSS receivers. In Proceedings of the 2011 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 29–30 June 2011. [Google Scholar] [CrossRef]
- Dong, D.; Wang, M.; Chen, W.; Zeng, Z.; Song, L.; Zhang, Q.; Cai, M.; Cheng, Y.; Lv, J. Mitigation of multipath effect in GNSS short baseline positioning by the multipath hemispherical map. J. Geod. 2015, 90, 255–262. [Google Scholar] [CrossRef]
- Fuhrmann, T.; Luo, X.; Knöpfler, A.; Mayer, M. Generating statistically robust multipath stacking maps using congruent cells. GPS Solut. 2014, 19, 83–92. [Google Scholar] [CrossRef]
- Zhong, P.; Ding, X.; Yuan, L.; Xu, Y.; Kwok, K.; Chen, Y. Sidereal filtering based on single differences for mitigating GPS multipath effects on short baselines. J. Geod. 2009, 84, 145–158. [Google Scholar] [CrossRef]
- Atkins, C.; Ziebart, M. Effectiveness of observation-domain sidereal filtering for GPS precise point positioning. GPS Solut. 2015, 20, 111–122. [Google Scholar] [CrossRef]
- Gao, R.; Liu, Z.; Odolinski, R.; Jing, Q.; Zhang, J.; Zhang, H.; Zhang, B. Hong Kong–Zhuhai–Macao Bridge deformation monitoring using PPP-RTK with multipath correction method. GPS Solut. 2023, 27, 195. [Google Scholar] [CrossRef]
- Chang, G.; Chao, C.; Yang, Y.; Xu, T. Tikhonov Regularization Based Modeling and Sidereal Filtering Mitigation of GNSS Multipath Errors. Remote Sens. 2018, 2018, 1801. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, F.; Zhang, X.; Pan, L. First result of GNSS-R-based sea level retrieval with CMC and its combination with the SNR method. GPS Solut. 2022, 26, 20. [Google Scholar] [CrossRef]
- Larson, K.; Löfgren, J.; Haas, R. Coastal sea level measurements using a single geodetic GPS receiver. Adv. Space Res. 2013, 51, 1301–1310. [Google Scholar] [CrossRef]
- Wang, X.; He, X.; Zhang, Q. Evaluation and combination of quad-constellation multi-GNSS multipath reflectometry applied to sea level retrieval. Remote Sens. Environ. 2019, 231, 111229. [Google Scholar] [CrossRef]
- Roussel, N.; Ramillien, G.; Frappart, F.; Darrozes, J.; Biancale, R.; Striebig, N.; Hanquiez, V.; Bertin, X.; Allain, D.J. Sea level monitoring and sea state estimate using a single geodetic receiver. Remote Sens. Environ. 2015, 171, 261–277. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B.; Gao, Y.; Shen, Y. Real-time carrier phase multipath detection based on dual-frequency C/N0 data. GPS Solut. 2018, 23, 7. [Google Scholar] [CrossRef]
- Wang, N.; Xu, T.; Gao, F.; Xu, G. Sea Level Estimation Based on GNSS Dual-Frequency Carrier Phase Linear Combinations and SNR. Remote Sens. 2018, 10, 470. [Google Scholar] [CrossRef]
- Gao, W.; Meng, X.; Gao, C.; Pan, S.; Zhu, Z.; Xia, Y. Analysis of the carrier-phase multipath in GNSS triple-frequency observation combinations. Adv. Space Res. 2018, 63, 2735–2744. [Google Scholar] [CrossRef]
- Reichert, A.K. Correction Algorithms for GPS Carrier-Phase Multipath Utilizing the Signal-to-Noise Ratio and Spatial Correlation. Master’s Thesis, University of Colorado, Boulder, CO, USA, 1999; pp. 23–24. [Google Scholar]
- Bilich, A.; Larson, K. Mapping the GPS multipath environment using the signal-to-noise ratio (SNR) (vol 42, art no RS6003, 2008). Radio Sci. 2007, 43, RS3839. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.I.M.; Wasle, E. GNSS-Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer: Vienna, Austria, 2007; pp. 154–158. [Google Scholar]
- Teunissen, P.J.G.; Kleusberg, A. GPS for Geodesy; Springer: Berlin/Heidelberg, Germany, 1998; pp. 176–182. [Google Scholar] [CrossRef]
- Bidikar, B.; Chapa, B.P.; Kumar, M.V.; Rao, G.S. GPS Signal Multipath Error Mitigation Technique. In Satellites Missions and Technologies for Geosciences; Demyanov, V., Becedas, J., Eds.; IntechOpen: Rijeka, Croatia, 2020; Chapter 4. [Google Scholar] [CrossRef]
- Krypiak-Gregorczyk, A.; Wielgosz, P. Carrier phase bias estimation of geometry-free linear combination of GNSS signals for ionospheric TEC modeling. GPS Solut. 2018, 22, 45. [Google Scholar] [CrossRef]
- Bolla, P.; Won, J.H. Performance Analysis of geometry-free and ionosphere-free code-carrier phase observation models in integer ambiguity resolution. IET Radar Sonar Navig. 2018, 12, 1313–1319. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, J. Extracting relevant patterns from GNSS observations to mitigate multipath in RTK deformation monitoring. GPS Solut. 2024, 28, 200. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, W.; Shen, Y.; Yu, S. Research on multipath suppression performance of multiple BOC signals of navigation satellite. IOP Conf. Ser. Mater. Sci. Eng. 2020, 793, 012044. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.M.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is All you Need. In Proceedings of the Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar] [CrossRef]
- Brown, T.B.; Mann, B.; Ryder, N.; Subbiah, M.; Kaplan, J.; Dhariwal, P.; Neelakantan, A.; Shyam, P.; Sastry, G.; Askell, A.; et al. Language Models are Few-Shot Learners. arXiv 2020, arXiv:2005.14165. [Google Scholar] [CrossRef]
- Bai, S.; Kolter, J.; Koltun, V. An Empirical Evaluation of Generic Convolutional and Recurrent Networks for Sequence Modeling. arXiv 2018, arXiv:1803.01271. [Google Scholar] [CrossRef]
- Jin, F.; Zhang, K.; Huang, Y.; Zhu, Y.; Chen, B. Parallel Spatio-Temporal Attention-Based TCN for Multivariate Time Series Prediction. Neural Comput. Appl. 2022, 35, 13109–13118. [Google Scholar]
- Yang, Z.; Zhang, Y.; Qian, K.; Wu, C. SLNet: A Spectrogram Learning Neural Network for blackDeep Wireless Sensing. In Proceedings of the 20th USENIX Symposium on Networked Systems Design and Implementation (NSDI 23), Boston, WA, USA, 17–19 April 2023. [Google Scholar]
- Welch, P. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Alber, C.; Ware, R.; Rocken, C.; Braun, J. Obtaining Single Path Delays from GPS Double Differences. Geophys. Res. Lett. 2000, 27, 2661–2664. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value/Data | Notes |
|---|---|---|
| Solver | Adam | |
| Kernel size | 5 | No less than |
| Stride | 1 | |
| Dilation factors | [2, 5, 8, 13, 17, 21] | stacked 6 times |
| Window size | 600 (s) | No less than |
| Sample rate | 1 Hz | Rover & Base |
| Train/Validation set | 90%/10% | # of sequences |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Y.; Guo, C.; Wang, J.; Xu, R. Multipath Effects Mitigation in Offshore Construction Platform GNSS-RTK Displacement Monitoring Using Parametric Temporal Convolution Network. Remote Sens. 2025, 17, 601. https://doi.org/10.3390/rs17040601
Jiang Y, Guo C, Wang J, Xu R. Multipath Effects Mitigation in Offshore Construction Platform GNSS-RTK Displacement Monitoring Using Parametric Temporal Convolution Network. Remote Sensing. 2025; 17(4):601. https://doi.org/10.3390/rs17040601
Chicago/Turabian StyleJiang, Yiyang, Cheng Guo, Jinfeng Wang, and Rongqiao Xu. 2025. "Multipath Effects Mitigation in Offshore Construction Platform GNSS-RTK Displacement Monitoring Using Parametric Temporal Convolution Network" Remote Sensing 17, no. 4: 601. https://doi.org/10.3390/rs17040601
APA StyleJiang, Y., Guo, C., Wang, J., & Xu, R. (2025). Multipath Effects Mitigation in Offshore Construction Platform GNSS-RTK Displacement Monitoring Using Parametric Temporal Convolution Network. Remote Sensing, 17(4), 601. https://doi.org/10.3390/rs17040601