Highlights
What are the main findings?
- The paper proposes an algorithm of terrain mapping using the responsibility-based Gaussian Mixture Model (GMM) combined with adaptive azimuth scan command adjustment. By this, it enables real-time terrain mapping that refines the preloaded DTED map with the online radar data.
- From the simulation results, it has been shown that the algorithm achieves accurate terrain map updates, outperforming conventional grid-based averaging and K-means clustering while maintaining low computational overheads.
What is the implication of the main finding?
- The proposed approach provides a practical and efficient solution for real-time onboard terrain mapping, which is essential for low-altitude aircraft operations in which obtaining accurate terrain information and ensuring survival are the top priorities.
- By explicitly incorporating uncertainty and dynamically adjusting radar scan directions, this framework can enhance mission safety and effectiveness in airborne navigation and defense applications.
Abstract
This paper presents a real-time terrain mapping method for aircraft’s navigation, combining probabilistic terrain modeling with adaptive azimuth scan command adjustment. The method refines a preloaded DTED in real time using radar scan data, enabling aircraft to update and utilize terrain elevation information during flight. The terrain is represented using a Gaussian Mixture Model (GMM), where radar scan data are evaluated based on their posterior responsibilities. A conditional nested GMM refinement is selectively applied in structurally ambiguous regions to capture multi-modal elevation patterns. The azimuth scan command is adaptively adjusted based on posterior responsibilities by increasing the step size in well-mapped regions and decreasing it in areas with low responsibility. This lightweight and adaptive strategy supports real-time operation with low computational cost. Simulations across diverse terrain types demonstrate accurate grid updates and adaptive scan control, with the proposed method achieving max error 29 m compared to grid-based averaging of 43 m and K-means clustering of 81 m. As the total number of updates is comparable to the existing methods, the proposed approach offers an advantage for real-time applications with enhanced grid accuracy.
1. Introduction
1.1. Background
Accurate terrain mapping is important for enhancing the maneuverability and survivability of modern aircraft. As mission profiles increasingly involve low altitude operations to evade enemy detection, accurate and up-to-date terrain information becomes essential for maintaining safe clearance margins. To minimize radar detection during low-altitude missions, aircraft employ terrain-following and terrain-avoidance maneuvers that allow them to fly close to the terrain while avoiding enemies [1,2,3]. These operations typically depend on onboard terrain databases, such as digital terrain elevation data (DTED), which provide gridded elevation maps of Earth’s surface [4].
DTED has been widely adopted in navigation, targeting, and mission planning systems due to its ability to provide essential terrain data [5]. However, conventional DTED is inherently static and often outdated, failing to reflect recent changes in terrain caused by environmental dynamics or natural disasters. This limitation makes it unsuitable for real-time decision making in dynamic environments. Moreover, reliance on pre-stored elevation maps limits adaptability in previously unmapped regions. These constraints underscore the need for real-time terrain mapping systems that can dynamically update elevation information during flight based on onboard sensor data.
1.2. Related Work
Recent terrain mapping studies can be broadly categorized into deterministic and probabilistic approaches. Deterministic methods often extend grid-based elevation maps through scan alignment and surface reconstruction [6,7]. However, these methods do not account for uncertainty and offer limited adaptability in dynamic environments. For example, LiDAR-based point cloud processing has been used for terrain mapping in autonomous trucks. These approaches generate 2.5D grid maps and mesh maps using Poisson reconstruction, with each map built from precise vehicle poses [7]. A similar approach has been applied to differential-drive ground robots, where 2.5D elevation maps are used for path planning based on slope and roughness, under the assumption of accurate localization [8]. Although they perform well in ideal scenarios, these methods may be sensitive to localization uncertainty, potentially affecting the terrain maps. Moreover, they typically operate under fixed scan patterns, lacking mechanisms to dynamically adapt sensing directions or update criteria in real-time. More recent work has introduced adaptive voxel grid representations that dynamically adjust resolution based on terrain structure, with demonstrations in both simulation and real-world environments [9]. These methods mitigate sensor noise and pose uncertainty, but still rely on fixed scan schedules without feedback-driven sensing.
To address the limitations of deterministic terrain mapping, probabilistic models such as Gaussian process (GP), mixture models, and Bayesian regression have been extensively explored [10,11,12]; while GP can adapt to local terrain smoothness, it often requires high computational resources, limiting its applicability in real-time onboard systems. Hybrid approaches such as GMM-GP and stochastic variational GP mapping improve model flexibility and uncertainty representation. However, these methods are typically applied to offline point clouds obtained from vision or sonar sensors [13,14]. They do not support real-time azimuth scan command adjustment or integration with radar-based terrain mapping. Recent extensions have attempted to improve the efficiency of GP-based mapping, such as multi-modal map building frameworks integrating SLAM with GP modeling [15] and latent-field occupancy mapping with sensor FoV priors [16]; while these studies demonstrate enhanced uncertainty representation, they are primarily tailored to LiDAR or vision data and remain unsuitable for lightweight radar-based real-time operation. Additional probabilistic approaches have addressed task-specific needs, such as slope-aware terrain estimation for legged robot locomotion [17] and probabilistic multi-level surface modeling [18]. Other studies consider localization uncertainty [19] or implement radar-specific occupancy modeling [20]. Neural elevation models have been proposed for terrain mapping and path planning [21]. Although they offer probabilistic representation, they are typically limited to offline processing or non-radar data sources, and do not provide mechanisms for real-time applications.
Cluster-based methods, particularly the Gaussian Mixture Model (GMM), offer a trade-off between modeling fidelity and computational efficiency. GMM-based terrain maps have been applied to real-time information–theoretic exploration by quantifying expected information gain [22]. These maps have also been used for distributed terrain estimation through mixture-model-based fusion across agents [23], supporting compact probabilistic representations. However, in most existing approaches, posterior responsibility is often treated as a clustering metric or as a weighting factor in data fusion. In contrast, the proposed method uses posterior responsibility to control both grid updates and azimuth scan commands in a feedback loop.
Radar maintains reliable performance under fog, dust, and spray, where LiDAR performance often degrades [20]. Previous work has extracted terrain point clouds from radar data cubes using PCFilt-94 filtering [24], but typically relies on fixed azimuth scan commands.
The proposed method addresses these limitations by introducing a responsibility-based terrain mapping and scan adaptation mechanism, enabling real-time adjustment of both grid updates and scan direction not supported by prior terrain mapping studies.
1.3. Contribution
This paper proposes a terrain mapping method that employs GMM-based responsibility to control both grid updates and azimuth scan commands. Unlike conventional approaches that rely on fixed scan patterns or uniform update rules, the proposed method introduces a feedback structure in which responsibility dynamically modulates the azimuth scan command. In regions with high elevation variance or structural ambiguity, a conditional nested GMM refinement is applied to improve model accuracy. Additionally, the azimuth angle is adaptively adjusted to focus sensing on low-responsibility areas. The proposed method enables a closed-loop mechanism between probabilistic terrain modeling and azimuth scan command adjustment, which is not supported by existing terrain mapping approaches.
2. Proposed Method
The proposed method consists of two main modules: probabilistic terrain mapping and azimuth scan command adjustment. Figure 1 presents the overall flowchart of the proposed method. Radar scan data, generated by the TSDG algorithm, are first pre-processed through filtering. A probabilistic terrain model is then constructed using a GMM, which effectively handles the sparsity of radar scan data. Subsequently, the azimuth scan command is adaptively adjusted according to the spatial distribution of posterior responsibilities, enabling the radar to concentrate on regions with low responsibility. This closed-loop interaction between mapping and sensing allows continuous refinement of terrain mapping by directing scans toward insufficiently modeled areas.
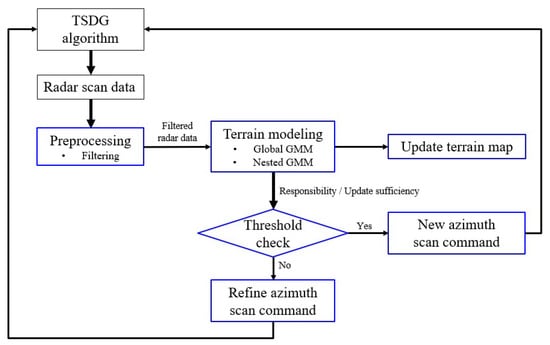
Figure 1.
Flowchart of the proposed method.
Radar scan data are generated by the TSDG algorithm which simulates the phased array radar as shown in Figure 2. The radar scan data are obtained by processing the reflected signals from ground surfaces illuminated by the radar beam. Rather than directly providing absolute terrain altitude at predefined locations, the data exhibit specific measurement patterns and uncertainty characteristics determined by radar physics and a signal processing algorithm [25].

Figure 2.
Flowchart of TSDG algorithm.
2.1. Terrain Mapping via GMM
To perform reliable terrain mapping from radar scan data, we adopt a probabilistic modeling approach using GMM. To address the inherent uncertainty in radar scan data, the method models the spatial distribution of terrain elevation probabilistically. The generated terrain map is represented on a uniform grid with a resolution of 30 m, consistent with DTED Level 2.
As radar scan data have their own uncertainty, they need to be filtered. Therefore, as shown in Figure 1, the proposed method starts with pre-processing. Radar scan data consist of latitude, longitude, altitude, and horizontal and vertical uncertainty. Horizontal uncertainty is typically around 17 m and vertical uncertainty ranges from 5 to 70 m. To reduce elevation error, only points with vertical uncertainty below 17 m are used for modeling. In this study, to improve mapping robustness and temporal coverage, radar scan data satisfying the vertical uncertainty threshold of 17 m are accumulated over a recent time window and collectively used for GMM-based terrain modeling.
2.1.1. Global GMM
Unlike traditional methods that compute the average elevation per grid cell, GMM can handle multi-modal elevation distributions and represent the terrain modeling confidence through posterior responsibilities. Let be the set of filtered radar scan data, where each radar point denotes position and altitude. The global terrain distribution is approximated by a GMM with K components:
where is the weight, is the mean vector, and is the covariance matrix of component k. The number of components K is selected by minimizing the Bayesian Information Criterion (BIC):
where is the maximized likelihood of the model, p is the number of free parameters, and N is the number of radar points. This criterion avoids overly complex models and prefers simple models that are more likely to perform well on unseen data. In this study, the GMM is applied to radar observations to represent the terrain elevation distribution, and this probabilistic representation forms the basis for updating the 30 m grid in Section 2.1.2.
The model is trained using the expectation–maximization (EM) algorithm. In the E-step, the posterior responsibility is estimated for each radar point , and in the M-step, the model parameters are updated to maximize the expected log-likelihood. Posterior responsibility, used as an indicator of model confidence, is computed as:
This EM process repeats until convergence, defined as the change in log-likelihood falling below a threshold . For each radar point, the maximum posterior responsibility among all components is computed as:
In this study, posterior responsibility is interpreted not only as a clustering metric but also as an indicator of terrain modeling quality. Regions with low responsibility are considered under-modeled or ambiguous; therefore, these regions are prioritized in the scan command adjustment. Although the global model describes the general terrain structure well, it tends to under-fit regions with steep elevation gradients, discontinuities, or complex terrain features. Because a single Gaussian assumes a uni-modal distribution, it often fails to model multi-modal features such as cliffs or ridges. This limitation motivates the use of nested GMM refinement to locally increase model accuracy and better capture complex terrain structures.
2.1.2. Nested GMM Refinement
Each 30 m DTED grid cell is considered individually for possible nested refinement. When nested GMM refinement is applied, the updated local model is integrated back into the global GMM representation. To improve the modeling of terrain components with complex elevation features, we employ a conditional nested GMM refinement strategy. The refinement is applied selectively to components that satisfy all three of the following conditions:
The first condition requires that the standard deviation of altitudes within the component exceeds 10 m, indicating a high variance in elevation. The second condition checks whether this deviation is significant relative to the range of altitudes, using the normalized deviation . Finally, the number of radar points must be large enough to support meaningful sub-clustering. If all three conditions are satisfied, a nested GMM is trained as a candidate model.
Each candidate model is evaluated against the original global GMM using BIC. The refinement is considered successful only when the BIC improvement exceeds the threshold. Furthermore, the global and nested GMMs are compared based on the average posterior responsibility of each model. Let and denote the mean responsibilities of the global-only and the nesting-augmented models, respectively. The nested GMM is adopted as the final model if it yields a higher average responsibility:
This criterion ensures that nested GMM refinement is applied only when it provides both a responsibility improvement and a better BIC score compared to the original model. If it does not satisfy either the BIC or responsibility criterion, the original global GMM is used instead. As a result, nested GMM is selectively applied to scans with significant vertical variation or multi-modal terrain.
2.1.3. Responsibility-Based Grid Update
After computing the posterior responsibilities, the altitude value z from each radar point is used to update the corresponding grid cell. To ensure reliable update, a grid cell is updated only when both of the following conditions are satisfied:
is the altitude-difference threshold that prevents small or noisy variations from triggering updates. Similarly, denotes the responsibility threshold, set to 0.85 in this study, which ensures that only high-confidence assignments contribute to grid updates.
Under these conditions, the existing grid elevation is directly replaced by the radar scan data. This update strategy ensures that only significant and reliable corrections modify the terrain map, maintaining robustness and computational efficiency. The generated terrain map, which now integrates high responsibility updates from the GMM model, serves as the basis for the adaptive radar scan command introduced in the following subsection.
2.2. Adaptive Azimuth Scan Command Adjustment
To improve terrain coverage while minimizing redundant scanning, the proposed method adaptively adjusts the azimuth scan command. In this study, the azimuth scan command refers to the scan angle relative to the aircraft’s heading direction, rather than to true north. An azimuth of corresponds to the forward direction, while negative and positive values indicate leftward and rightward deviations, respectively. For example, an azimuth of represents a scan direction one degree left of the aircraft’s heading.
The azimuth angle is then updated according to a predefined set of threshold-based rules, summarized in Table 1. The radar performs terrain scanning with a predefined pattern: center, left, center, right. At first, the radar scans terrain from the center which refers azimuth , then it scans leftward with a predefined azimuth angle.

Table 1.
Threshold based rules for azimuth scan command adjustment.
If the mean responsibility exceeds for three consecutive scan cycles and at least 40 grid cells have been updated, the azimuth angle is incremented to expand the scan range. For example, with a scan frequency of 4 Hz, three scan cycles correspond to 12 scans. If all 12 scans yield a mean responsibility above , the azimuth angle is adjusted accordingly. If no directional adjustment occurs within a 3 s interval, the azimuth angle is reset to an initial value to maintain stable and continuous scanning behavior. The threshold values for azimuth scan command adjustment were empirically determined. A responsibility bound of 0.85 reliably indicated high-confidence updates, while requiring at least 40 updated grid cells prevented small or noisy variations from triggering refinements. Moderate changes to these thresholds did not alter the overall trends.
This threshold-based strategy provides a lightweight and interpretable mechanism for azimuth scan command adjustment. It increases the azimuth angle in well-mapped areas, decreases it in uncertain regions, and resets the azimuth angle if no directional change occurs for several consecutive scans.
3. Simulation
3.1. Simulation Condition
3.1.1. Simulation Scenario
The simulation is conducted to evaluate the performance of the proposed terrain mapping method. The baseline terrain is defined using DTED Level 2, which provides digital elevation data of real geographic regions in South Korea. These DTED datasets serve as ground truth references, while radar scan data are generated using the TSDG algorithm.
Three experiments are conducted to assess various aspects of the proposed method. The first experiment focuses on the Gangwon region, which is characterized by rough terrain. This scenario is selected to evaluate the algorithm’s ability to capture complex terrain structures. The effectiveness of nested GMM refinement in complex terrain is validated by analyzing its impact on model confidence and structural resolution. Furthermore, an additional test is conducted under zero-uncertainty conditions by setting both horizontal and vertical uncertainty values to zero. Although the radar beams do not intersect the centers of the DTED grid cells precisely, the zero-uncertainty condition allows for a clear evaluation of the algorithm’s performance without the influence of measurement uncertainty.
The second experiment compares mapping performance across the three terrain types. To ensure generalizability, three representative regions are selected based on terrain roughness [26]. In this study, terrain roughness was quantified using the RMSD of elevation, which serves as a practical proxy for topographic variability; while alternative definitions of roughness exist in the literature, RMSD provides a consistent and interpretable measure for the simulation. The terrain roughness is calculated based on Equation (8) for every km and regions are categorized based on their statistical roughness profile [27,28].
denotes the elevation value at sample n, and is the average elevation over the region of interest. N is the total number of elevation points within the analysis window. The results of classification are shown in Figure 3. As shown in Figure 4, the Gangwon region (rough), Jeju Island (moderate), and the Yeonggwang–Gimje region (smooth) are selected.
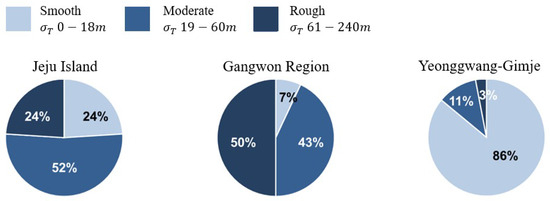
Figure 3.
Terrain classification.

Figure 4.
Simulation regions.
The final experiment evaluates the proposed method against two baseline approaches: grid-based averaging and K-means clustering method. Grid-based averaging represents a deterministic method, while K-means is a widely used non-parametric clustering method. The comparison focuses on mapping fidelity and scan efficiency. These three experiments jointly evaluate the modeling accuracy, generalizability, and practical benefits of the proposed terrain mapping method across different terrain types and baseline methods.
3.1.2. Parameter Setting
Simulation parameters are categorized into three groups: radar scan parameters, GMM-related parameters, and update conditions. A total of 100 radar scans are performed in each experiment with adaptive azimuth scan command. Table 2, Table 3 and Table 4 summarize the main parameters used in the simulation. The aircraft flies 250 m/s and radar scans the terrain with a certain scan pattern. As shown in Table 2, the radar scans the center; then, it starts to scan leftward with the initial azimuth angle. The azimuth angle is updated based on the threshold-based rules defined in Table 1, up to the maximum angle limit.
Table 2.
Radar scan parameters.
Table 3.
GMM and nested GMM parameter settings.
Table 4.
Grid update conditions.
3.2. Simulation Results
3.2.1. Evaluation of Mapping Performance in Rough Terrain
To examine the performance of the proposed method in rough terrain, we evaluate the mapping quality over the Gangwon region under realistic sensor conditions, including measurement uncertainty. Figure 5 visualizes the updated grid cells (red dots) overlaid on the DTED-based terrain mesh, illustrating the method’s performance in modeling complex terrain features. The analysis focuses on the spatial distribution of updates and mapping accuracy.
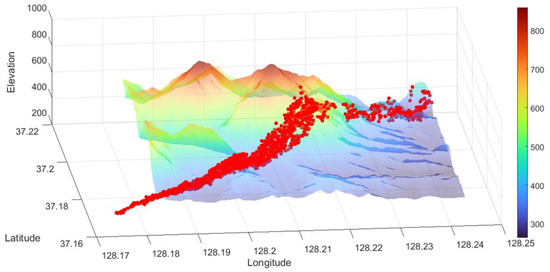
Figure 5.
Updated DTED grid points are marked with red dots along the flight path in Gangwon ( azimuth coverage).
Figure 6 illustrates the overall mapping performance across all scans in the Gangwon region. Figure 6a shows the number of radar points and updated grid cells for each scan. Although the number of radar observations decreases due to the terrain complexity, the method accumulates radar data over time, enabling consistent grid updates. Figure 6b presents the number of final GMM components per scan. The number of GMM components changes across scans, illustrating how the model dynamically adjusts its complexity to the terrain. Figure 6c shows the mean, maximum, and minimum posterior responsibilities per scan, which are closely related to the model confidence. As defined in Table 4, the grid is updated when the responsibility exceeds 0.8. Figure 6d presents the azimuth angle over time, demonstrating the adaptive azimuth scan command strategy. According to the rules in Table 1, the azimuth angle is updated every 12 scans based on recent responsibility trends.

Figure 6.
Mapping performance in the Gangwon region.
Figure 7 and Figure 8 show the mean responsibility and BIC improvement for each scan, which are used to determine whether nested GMM refinement should be applied. Scan ID 96 shows both a low mean responsibility under the global model and a significant gain in BIC after nested GMM refinement, making it a representative case for detailed analysis. Table 5 compares the global and nested GMM results for Scan ID 96. The increase in components from 5 to 8, combined with the improved BIC and responsibility, suggests that the nested model captures finer terrain structures that the global model failed to distinguish. Both the mean and minimum responsibilities are increased, indicating improved model confidence. The lower BIC score supports the statistical advantage of the nested GMM.

Figure 7.
Comparison of mean responsibility between global and nested GMM.

Figure 8.
BIC improvement of nested GMM.
Table 5.
Performance comparison between global and nested GMM (Scan ID 96).
Figure 9 presents a detailed analysis of the improvement in maximum posterior responsibility due to the nested GMM refinement applied to Scan ID 96. Figure 9a shows how the maximum responsibility of individual radar points shifts after applying the nested refinement, compared to the original global model. The distribution is skewed toward positive values, indicating that most radar points exhibit increased responsibility after refinement. This confirms that the improvement is not limited to a few outliers but occurs consistently across the scan. Figure 9b visualizes the relationship between elevation and the change in maximum responsibility for each radar point. It shows that points located at higher altitudes tend to exhibit greater increases in responsibility after nested refinement. These results indicate that the global GMM may not sufficiently capture local terrain variations in areas with complex elevation patterns. Therefore, nested GMM refinement is necessary to achieve accurate terrain representation.

Figure 9.
Responsibility improvement (Scan ID 96).
Figure 10 provides a comparison between global and nested GMM clustering. The nested model produces more detailed clustering that clearly separates overlapping elevation ranges, supporting the earlier analysis results.

Figure 10.
Comparison between GMM and nested GMM (Scan ID 96).
To further isolate the impact of measurement uncertainty and validate the structural robustness of the method, we additionally conducted a simulation without measurement uncertainty. To quantify mapping performance under different update thresholds and uncertainty settings, Table 6 compares the statistics across three cases. Case 1 corresponds to the standard setting with full measurement uncertainty. Case 2 and Case 3 simulate idealized scenarios by removing uncertainty and changing the update threshold to assess the proposed method.
Table 6.
Mapping performance according to uncertainty.
In Case 2, the comparison reveals that, even under idealized conditions without uncertainty, the number of updated grids drops significantly due to the stricter update condition. However, when the threshold is lowered in Case 3, the number of updates becomes comparable to Case 1. Despite the removal of measurement uncertainty, the average elevation change in Case 3 remains around 4 m, implying that residual modeling error stems from terrain complexity rather than measurement uncertainty. These results indicate that the update mechanism is sensitive to the choice of threshold, and that the nested GMM refinement operates primarily based on terrain structure. The method remains responsive across different conditions, showing robustness to measurement uncertainty and threshold settings.
3.2.2. Comparative Evaluation Between Terrain Type
To evaluate the generalizability of the proposed method, the second simulation compares performance across three representative terrain types in South Korea: Gangwon region (rough), Jeju Island (moderate), and Yeonggwang–Gimje (smooth). Figure 11 presents the mean posterior responsibility per scan for each region. The Gangwon region maintains consistently high responsibility values, despite its complex topography. This indicates that the model successfully adapts its structure by increasing the number of components. Jeju Island shows more variation in responsibility due to irregular slope transitions. In contrast, Yeonggwang–Gimje, classified in smooth terrain, shows consistently high responsibility values across all scans. Table 7 summarizes the overall modeling behavior per region using the average number of selected GMM components and the percentage of scans with mean responsibility greater than 0.85.

Figure 11.
Mean responsibility across terrain types.
Table 7.
Summary of average GMM components and high-responsibility scans.
In addition, Table 8 presents the percentage distribution of scans for each selected K components. This allows for a more detailed comparison to be made of how the model adapts its complexity across different terrain structures.
Table 8.
Distribution of selected GMM components.
These results demonstrate that the proposed method dynamically adjusts its model complexity based on terrain characteristics while maintaining high responsibility values. In rough regions such as Gangwon, the model assigns more clusters with consistently high responsibility. Smooth areas like Yeonggwang–Gimje require fewer clusters and exhibit stable responsibility behavior.
3.2.3. Comparison with Baseline Methods
To evaluate the effectiveness of the proposed method, we compare it against two baseline approaches: grid-based averaging and K-means clustering. In this simulation, radar measurement uncertainty was set to zero, and the altitude update threshold was fixed at 1 m to isolate algorithmic behavior. The averaging method computes the mean elevation using radar scan data within each grid cell and updates the grid if the mean elevation differs sufficiently from the current DTED. The K-means method clusters radar scan data into K components and applies grid-wise averaging within each cluster to compute grid updates. Since responsibility is not available in the baseline methods, the azimuth angle is increased according to the number of updated grids.
As summarized in Table 9, the proposed method and the averaging baseline yield a similar number of total updates, while the K-means method results in fewer updates overall. Although the mean elevation change per update is comparable across methods, the averaging and K-means methods produce substantially larger maximum changes. Since measurement uncertainty is set to zero, these large corrections suggest that both methods fail to suppress extreme updates even when input conditions are ideal. Although the proposed method requires higher computational cost, its runtime remains within a practical range for real-time mapping applications.
Table 9.
Comparison of methods.
The K-means method results in fewer updates but shows larger average and maximum elevation changes. This indicates that, although updates are applied less frequently, they often become excessively large. As shown in Figure 12a, the number of updated grids remains almost unchanged through the simulation, even after Scan ID 80 when radar points increase. Figure 12b shows that the azimuth scan command stays fixed at , so the K-means method does not respond to the increase in radar points or the expanded scan region.

Figure 12.
Simulation results using K-means (k = 3).
Overall, the proposed method achieves more stable and selective updates compared to the baseline methods; while the total number of updates is similar to the averaging method, the proposed approach avoids excessive corrections. Unlike the K-means method, which maintains a fixed clustering structure, the proposed method adjusts its modeling components based on the terrain features. Moreover, it interacts with the azimuth scan command, expanding the azimuth angle when updates are insufficient.
4. Discussion
The simulation results in Section 3.2 demonstrate that the proposed method provides reliable terrain mapping performance across representative regions in South Korea. In particular, the nested refinement was selectively activated in complex terrain such as Gangwon. This demonstrates that the proposed method can adaptively increase modeling resolution when the terrain distribution becomes multi-modal. In contrast, the Jeju and Yeonggwang–Gimje areas required fewer refinements due to their smoother topographic structures. These results highlight the flexibility of responsibility-based GMM for different terrain complexities.
Compared with GP regression approaches [10,11,12], which require training and or prediction per point, the proposed method is much lighter. It achieves near-linear updates of with bounded K and I. This efficiency enables real-time onboard radar operation. Unlike slope-aware terrain estimation [17], which uses static scan patterns, our method adapts the azimuth scan command to model uncertainty. Previous radar occupancy mapping methods [20] update cells deterministically, while our responsibility-based update allows selective refinement with quantified reliability.
These distinctions emphasize that the proposed method is not merely a clustering algorithm. Instead, it constitutes an integrated strategy that combines probabilistic modeling with adaptive scan control. The method requires more computation than grid-based averaging and K-means, but the performance gain outweighs this cost. With optimized onboard implementation, the runtime would be significantly reduced. Overall, the method demonstrates both superior performance and practical feasibility for real-time airborne operation.
Nevertheless, the proposed method has several limitations. First, the evaluation relied on DTED-based radar simulations with controlled sensor noise. Such simulations may not fully capture uncertainties arising from atmospheric interference, platform vibration, or radar hardware non-idealities encountered in actual flight. In addition, the responsibility thresholds were fixed across all scenarios.
In conclusion, the results show that the proposed method achieves real-time terrain mapping while explicitly incorporating probabilistic uncertainty. The framework is therefore expected to complement existing approaches. In particular, it offers advantages for airborne radar applications where lightweight and adaptive operation is critical.
5. Conclusions
This paper presents a terrain mapping method that combines a responsibility-based GMM model with adaptive azimuth scan command adjustment. The approach refines preloaded DTED using radar scan data, with nested GMM refinement enabling finer modeling in multi-modal terrain and adaptive scan control reducing redundant scans.
Simulation results across representative Korean regions confirmed that the method produces accurate and selective updates, with stable performance compared to grid-based averaging and K-means clustering. The results also demonstrated that responsibility-based updates allow terrain-dependent refinement and scan adaptation.
While the current threshold strategy proved effective in simulation, the criteria were not formally optimized and may not generalize to all flight conditions. Future research will focus on adaptive threshold selection, testing with real radar measurements, and integration with additional sensing sources such as LiDAR or stereo vision.
Author Contributions
Conceptualization, H.L. and D.J.; methodology, H.L.; software, H.L.; validation, H.L. and D.J.; formal analysis, H.L.; investigation, H.L.; resources, H.L.; data curation, H.L.; writing—original draft preparation, H.L.; writing—review and editing, H.L. and D.J.; visualization, H.L.; supervision, D.J.; project administration, D.J.; funding acquisition, D.J. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by Korea Research Institute for defense Technology planning and advancement (KRIT) grant funded by the Korea government (DAPA (Defense Acquisition Program Administration)) (No. KRIT-CT-22-030, Reusable Unmanned Space Vehicle Research Center, 2025).
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to institutional restrictions.
Acknowledgments
The authors would like to express special thanks to Sangchul Lee for providing the initial conceptualization of this work.
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Barfield, F.; Probert, J.; Browning, D. All terrain ground collision avoidance and maneuvering terrain following for automated low level night attack. In Proceedings of the 11th Digital Avionics Systems Conference, Seattle, WA, USA, 5–8 October 1992. [Google Scholar]
- Kisslinger, R. Manual Terrain-Following System Development for a Supersonic Fighter Aircraft. J. Aircr. 1968, 3, 305–309. [Google Scholar] [CrossRef]
- Krachmalnick, F.M.; Vetsch, G.J.; Wendl, M.J. Automatic Flight Control System for Automatic Terrain-Following. J. Aircr. 1968, 5, 168–175. [Google Scholar] [CrossRef]
- Agency, N.G.I. Digital Terrain Elevation Data (DTED), MIL-PRF-89020B. 2000. Available online: https://www.pancroma.com/downloads/MIL-PDF-89020B.pdf (accessed on 9 September 2025).
- U.S. Air Force, Air Force Pamphlet 14-210: USAF Intelligence Targeting Guide. Attachment 8: Geospatial Information and Products. 1998. Available online: https://irp.fas.org/doddir/usaf/afpam14-210/part21.htm (accessed on 9 September 2025).
- Pfaff, P.; Triebel, R.; Burgard, W. An Efficient Extension to Elevation Maps for Outdoor Terrain Mapping and Loop Closing. In Proceedings of the International Conference on Field and Service Robotics (FSR), Port Douglas, Australia, 29–31 July 2005; pp. 165–176. [Google Scholar]
- Wang, J.; Tian, B.; Zhu, Y.; Yao, T.; Pan, Z.; Chen, L. Terrain Mapping for Autonomous Trucks in Surface Mine. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 4369–4374. [Google Scholar] [CrossRef]
- Dergachev, S.; Muravyev, K.; Yakovlev, K. 2.5D Mapping, Pathfinding and Path Following for Navigation of a Differential Drive Robot in Uneven Terrain. IFAC-PapersOnLine 2022, 55, 80–85. [Google Scholar] [CrossRef]
- Zhou, H.; Ping, P.; Shi, Q.; Chen, H. An Adaptive Two-Dimensional Voxel Terrain Mapping Method for Structured Environment. Sensors 2023, 23, 9523. [Google Scholar] [CrossRef] [PubMed]
- Lang, T.; Plagemann, C.; Burgard, W. Adaptive Non-Stationary Kernel Regression for Terrain Modeling. In Proceedings of the Robotics: Science and Systems (RSS), Atlanta, GA, USA, 27–30 June 2007. [Google Scholar]
- Plagemann, C.; Kersting, K.; Burgard, W. Non-stationary Gaussian Process Regression Using Point Estimates of Local Smoothness. In Proceedings of the European Conference on Machine Learning (ECML), Antwerp, Belgium, 15–19 September 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 342–357. [Google Scholar] [CrossRef]
- Nguyen-Tuong, D.; Peters, J.; Seeger, M. Local Gaussian Process Regression for Real-Time Online Model Learning and Control. In Proceedings of the Advances in Neural Information Processing Systems (NeurIPS), Vancouver, BC, Canada, 8–11 December 2008. [Google Scholar]
- Zou, Q.; Brenner, C.; Sester, M. Gaussian Process Mapping of Uncertain Building Models with GMM as Prior. IEEE Robot. Autom. Lett. 2023, 8, 6579–6586. [Google Scholar] [CrossRef]
- Torroba, I.; Sprague, C.I.; Folkesson, J. Fully-Probabilistic Terrain Modelling and Localization with Stochastic Variational Gaussian Process Maps. IEEE Robot. Autom. Lett. 2022, 7, 8729–8736. [Google Scholar] [CrossRef]
- Jang, E.; Lee, S.J.; Jo, H. A New Multimodal Map Building Method Using Multiple Object Tracking and Gaussian Process Regression. Remote Sens. 2024, 16, 2622. [Google Scholar] [CrossRef]
- Gentil, C.L.; Pradalier, C.; Barfoot, T.D. Towards Efficient Occupancy Mapping via Gaussian Process Latent Field Shaping. arXiv 2025, arXiv:2506.13640. [Google Scholar] [CrossRef]
- Plagemann, C.; Mischke, S.; Prentice, S.; Kersting, K.; Roy, N.; Burgard, W. A Bayesian regression approach to terrain mapping and an application to legged robot locomotion. J. Field Robot. 2009, 26, 789–811. [Google Scholar] [CrossRef]
- Rivadeneyra, C.; Miller, I.; Schoenberg, J.R.; Campbell, M. Probabilistic estimation of multi-level terrain maps. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Fankhauser, P.; Bloesch, M.; Hutter, M. Probabilistic Terrain Mapping for Mobile Robots With Uncertain Localization. IEEE Robot. Autom. Lett. 2018, 3, 3019–3026. [Google Scholar] [CrossRef]
- Weidinger, C.; Kadiofsky, T.; Glira, P.; Zinner, C.; Kubinger, W. 3D Online Terrain Mapping with Scanning Radar Sensors. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 1, 125–132. [Google Scholar] [CrossRef]
- Dai, A.; Gupta, S.; Gao, G. Neural Elevation Models for Terrain Mapping and Path Planning. arXiv 2024, arXiv:2405.15227. [Google Scholar] [CrossRef]
- Tabib, W.; Corah, M.; Michael, N. Real-Time Information-Theoretic Exploration with Gaussian Mixture Model Maps. In Proceedings of the Robotics: Science and Systems (RSS), Breisgau, Germany, 22–26 June 2019; pp. 1–9. [Google Scholar]
- Schoenberg, J.R.; Campbell, M. Distributed terrain estimation using a mixture-model based algorithm. In Proceedings of the 2009 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009. [Google Scholar]
- Harcourt, W.D.; Macfarlane, D.G.; Robertson, D.A. 3D Terrain Mapping and Filtering From Coarse-Resolution Data Cubes Extracted From Real-Aperture 94-GHz Radar. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–18. [Google Scholar] [CrossRef]
- Yoo, M.; Kang, S.; Lee, H.; Jang, D.-S.; Lee, S. A Study on a Terrain Scan Data Generation Algorithm Using Digital Terrain Elevation Data (DTED). Int. J. Aeronaut. Space Sci. 2023, 24, 1418–1429. [Google Scholar] [CrossRef]
- Fatale, L.A.; Ackeret, J.R. Impact of Digital Terrain Elevation Data (DTED) Resolution on Terrain Visualization: Simulation vs. Reality; Technical Report; U.S. Army Topographic Engineering Center: Fort Belvoir, VA, USA, 1991.
- Park, S. General and Unique Characteristics of the Korean Peninsula’s Terrain and Its Sustainability. J. Korean Geogr. Soc. 2014, 49, 656–674. (In Korean) [Google Scholar]
- Tak, H.; Kim, S. Terrain Classification of the Korean Peninsula for Small-Scale Terrain Mapping. J. Korean Geogr. Soc. 2017, 52, 375–391. (In Korean) [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).