1. Introduction
The Global Navigation Satellite System (GNSS) detects targets in a monitored area using satellite signals and their reflected counterparts. The GNSS is widely utilized to exploit external radiation sources, with hundreds of satellites in orbit, including GPS, Galileo, GLONASS, and BeiDou [
1]. As a microwave signal, GNSS can penetrate dense forests and other obstacles, continuing to operate in various weather conditions. The signal, modulated by a PRN code, offers a 30 dB processing gain, enabling the detection of weak signals below the background noise. This significantly enhances the detection system’s sensitivity, making GNSS effective for detecting and tracking moving targets such as missiles and drones in remote sensing.
The above advantages make the GNSS widely applied in the measurement of sea surface height [
2], sea surface significant wave height [
3], sea surface wind field [
4], and sea salinity [
5]. In terms of land surface remote sensing, it provides more options and possibilities for the measurement of soil moisture [
6], snow thickness [
7], and vegetation cover [
8].
In the field of ground target detection and parameter inversion, researchers have proposed various effective detection and estimation methods based on different environmental and target characteristics. For the small and medium-sized targets on the sea surface, Santi et al. proposed the method of Range and Doppler (RD) domain transformation combined with a local coordinate system to extract the weak target information in the echo [
9,
10]. Li Y.M. et al. simulated the DDM of large targets, and verified the effectiveness of short-term cumulative signals for large target detection based on the Fourier transform method of range-Doppler dimension [
11]. Zhou X.K. et al. proposed a novel moving target detection (MTD) algorithm for a GNSS-based passive bistatic radar (PBR), employing a modified Radon Fourier Transform (MRFT) to achieve the required long-time integration for moving targets [
12]. They utilized GPS signals as illuminators of opportunity and processed the data using both Radon Fourier Transform (RFT) and High-Frequency Radar Imaging System (HFRIS) methods, successfully detected an airplane target in 2022 [
13]. T. Beltramonte et al. analyzed the optimal conditions for ship detection with a standard GNSS-R (Global Navigation Satellite System-Reflection) signal processing chain receiver [
14]. In terms of improving target detection performance, relevant studies have further optimized detection methods. Huang C. et al. proposed a target detection method based on the Multiframe Recursive Association (MFRA), which utilizes a scoring function with the target state as the variable to accomplish detection, providing higher detection accuracy for targets with complex motion [
15]. To address the issue of defocused target detection, Zeng H.C. et al. proposed a series of improvements to the traditional particle filter (PF)-based methods, including the use of measurement models and the likelihood ratio function (LRF) to enhance target state estimation accuracy, and the incorporation of the sequential Monte Carlo (SMC) algorithm to improve filter performance [
16]. Additionally, He Z.Y. et al. introduced a method combining short-time Fourier transform with the modified random sample consensus algorithm, which robustly estimates the target velocity while reducing computational complexity [
17].
As detection requirements expand to high-dynamics and complex background scenarios, target localization and tracking algorithms continue to evolve. The Least Squares (LS) method, due to its simple structure, is widely used for static parameter estimation, but its performance is limited in high-noise environments. Kalman Filtering (KF) and its extended forms, such as Extended Kalman Filter (EKF), Unscented Kalman Filter (UKF), and Cubature Kalman Filter (CKF), improve state estimation accuracy through sampling propagation mechanisms for nonlinear systems and have broad applications in dynamic target tracking. For modeling nonlinear and non-Gaussian systems, particle filtering (PF) approximates the posterior probability density using random sampling points, effectively enhancing the handling of complex systems. However, it still faces challenges such as particle degeneration and high computational overhead [
18]. The fusion of multi-source heterogeneous sensors has become a core development direction for current target detection and localization systems. Several fusion methods have been explored: Baldoni et al. achieved the high-precision estimation of lateral offsets and heading by fusing GNSS with on-vehicle images [
19]; Dawson et al. employed EKF to fuse on-vehicle motion sensors, achieving location error control within 2 m under GNSS signal loss scenarios, with up to a 90% reduction in positioning errors [
20]; Beuchert et al. implemented a factor graph-based fusion method for the joint estimation of pseudorange and carrier phase, successfully recovering target trajectories in low-visibility environments [
21]; and Vanek et al. proposed a tightly coupled fusion strategy with a prediction-driven cycle slip detection mechanism, effectively enhancing the accuracy of three-dimensional coordinates [
22].
Recent advances in GNSS-based passive radar target detection have focused on overcoming challenges related to low SNR, multi-target tracking, and maneuvering targets. Tang et al. introduced a multi-target track-before-detect (TBD) method for low-altitude surveillance, combining a dual-channel coarse focusing (DCCF) cluster centroid extraction with a modified cardinalized probability hypothesis density (MCPHD) filter enhanced by Doppler-assisted birth intensity estimation and trajectory management. Simulations and GPS L5-based experiments validated its robust multi-target tracking under low SNR [
23]. Building on this, Li Yu proposed a distributed satellite radar approach for aerial moving target detection, addressing the uncontrollable nature of GNSS illuminators by employing active self-transmitting/receiving satellite radars. The method features a two-stage process with a range-difference-based positive and negative second-order Keystone transform (SOKT) for precise range compensation, along with Doppler frequency rate variance and spatial smoothing functions to improve detection [
24]. Simulations confirmed the enhanced detection performance. However, existing methods largely target non-maneuvering objects and inadequately compensate for high-order motion migration. To fill this gap, He Zhenyu developed a multi-frame hybrid integration technique optimized via differential evolution, employing a third-order polynomial model (TPM) to accurately approximate the bistatic range histories of maneuvering targets [
25]. Formulated as a constrained optimization problem, this approach efficiently corrects high-order motion effects. Both simulations and experiments demonstrated that it achieves the same detection probability (0.9) at least 2 dB lower SNR than prior methods, advancing the GNSS passive radar’s capability in tracking complex dynamic targets.
The electromagnetic scattering characteristics of large targets on the sea surface are complex. Therefore, in order to obtain more realistic simulation results with practical guidance, it is crucial to select appropriate methods for the calculations. For theoretical calculations of target scattering, the computational methods can be divided into precise numerical algorithms and high-frequency approximation methods. Precise numerical methods require high hardware computational capabilities. High-frequency approximation methods, which are more computationally efficient and better suited for large-scale target calculations, include Physical Optics (PO), Geometric Optics (GO), and the Shooting and Bouncing Ray (SBR). The PO algorithm, based on the principle of high-frequency field locality, efficiently computes scattered fields with high flexibility. However, it is limited to calculating the scattering characteristics of smooth surfaces within small regions. Similarly, the GO algorithm cannot handle diffraction phenomena, making it unsuitable for discontinuous surfaces, such as rough surfaces, sharp edges, or corners. When the scatterer is large relative to the wavelength, scattering is primarily dominated by the object’s flat surfaces or smooth edges. High-frequency methods generally assume that under such conditions, the contributions of edge and tip diffraction are relatively small. Therefore, neglecting these diffraction effects does not significantly affect the accuracy of the results. Song F., Zhang N. et al. proposed two related methods for scattering from rough surfaces. The first is the fast physical optics (FPO) method, which combines quadratic discretization with closed-form formulas to reduce the number of patches while maintaining accuracy [
26]. The second is the multilevel second-order physical optics (MLSO-PO) method, which integrates quadratic discretization with multilevel technology to reduce computational workload and improve efficiency in simulating scattering patterns [
27]. For different scatterers, the hybrid method can select appropriate computational techniques for both the target and the rough surface, ensuring high accuracy without significantly impacting efficiency, while also considering the coupling effects between the target and the rough surface. For complex port scenes or ship scattering problems on dynamic sea surfaces, Zhang M. et al. combine the GO-PO hybrid method with the facet-based asymptotical model (FBAM) to account for the mutual interaction between the target and the environment, such as shadowing effects, enabling more accurate composite scattering calculations [
28,
29]. Wei Y.W. et al. proposed the hybrid Shooting and Bouncing Rays–Physical Optics (SBR-PO) method to simulate the interaction between the object and the rough surface, and adopted far-field half-space dyadic Green’s functions to account for the effects of the infinite half-space environment [
30]. Dong C.L. et al. proposed an improved ray-tracing technique called the two-scale division method (TSDM). This technique combines the advantages of forward and backward tracing, enhancing the accuracy of the Geometric Optics–Physical Optics/Physical Theory of Diffraction (GO-PO/PTD) hybrid method [
31]. Huang Y. et al. proposed the dynamic volume equivalent shooting and bouncing ray (DVESBR) method, which combines volume equivalent physical optics (VEPO) and VESBR to effectively address the 3D scattering problem of targets moving on a rough surface [
32].
In summary, the current field of target detection and parameter inversion shows a development trend of deep integration between algorithm optimization and multi-source data fusion. On one hand, the improvement of positioning algorithms enhances the processing quality of single-source data; on the other hand, the redundancy of multi-source information breaks through the limitations of single-geometry configurations. This technological fusion strategy not only improves the accuracy of target positioning but also provides new solutions for reliable detection in complex scenarios [
33]. However, existing methods still face numerous challenges in terms of real-time performance, computational efficiency, and adaptability to complex environments. This is particularly evident in key aspects such as high dynamics target tracking and weak signal extraction, which require further optimization and breakthroughs.
To address these challenges, this paper proposes a Range-Doppler Map (RDM) simulation method based on GNSS signals and electromagnetic scattering modeling, analyzing the impact of signals from different frequency bands on target detection performance for moving target imaging and information inversion. In addition, the Unscented Particle Filter (UPF) algorithm was employed to track and invert the position and velocity information of moving targets, providing a higher inversion accuracy in scenarios with four satellite solutions. Therefore, this study provides theoretical support and technical reference for the modeling optimization and engineering practicality of GNSS-based passive detection systems in complex environments.
2. Target Echo Simulation Based on GNSS
Based on the signal of BDS, this paper studies and establishes a target detection model. BDS satellites transmit signals in five frequency bands [
34,
35]. The main transmitted signals are B1I and B3I signals with carrier frequencies of 1561.1 MHz and 1268.5 MHz, respectively. The baseband signal of the BDS signal is composed of the navigation code, acquisition code, and ranging code, and then modulated on the carrier frequency. The following focuses on the modulation and generation of baseband signals.
Taking B1I signal as an example, it is composed of ranging codes and navigation messages modulated on the carrier with the following signal expression:
where
represents the satellite number,
represents the amplitude of signal,
represents ranging code,
represents the navigation messages modulated on the B1I signal’s ranging code,
represents the carrier frequency of B1I signal,
denotes the initial carrier phase, and
represents the time series.
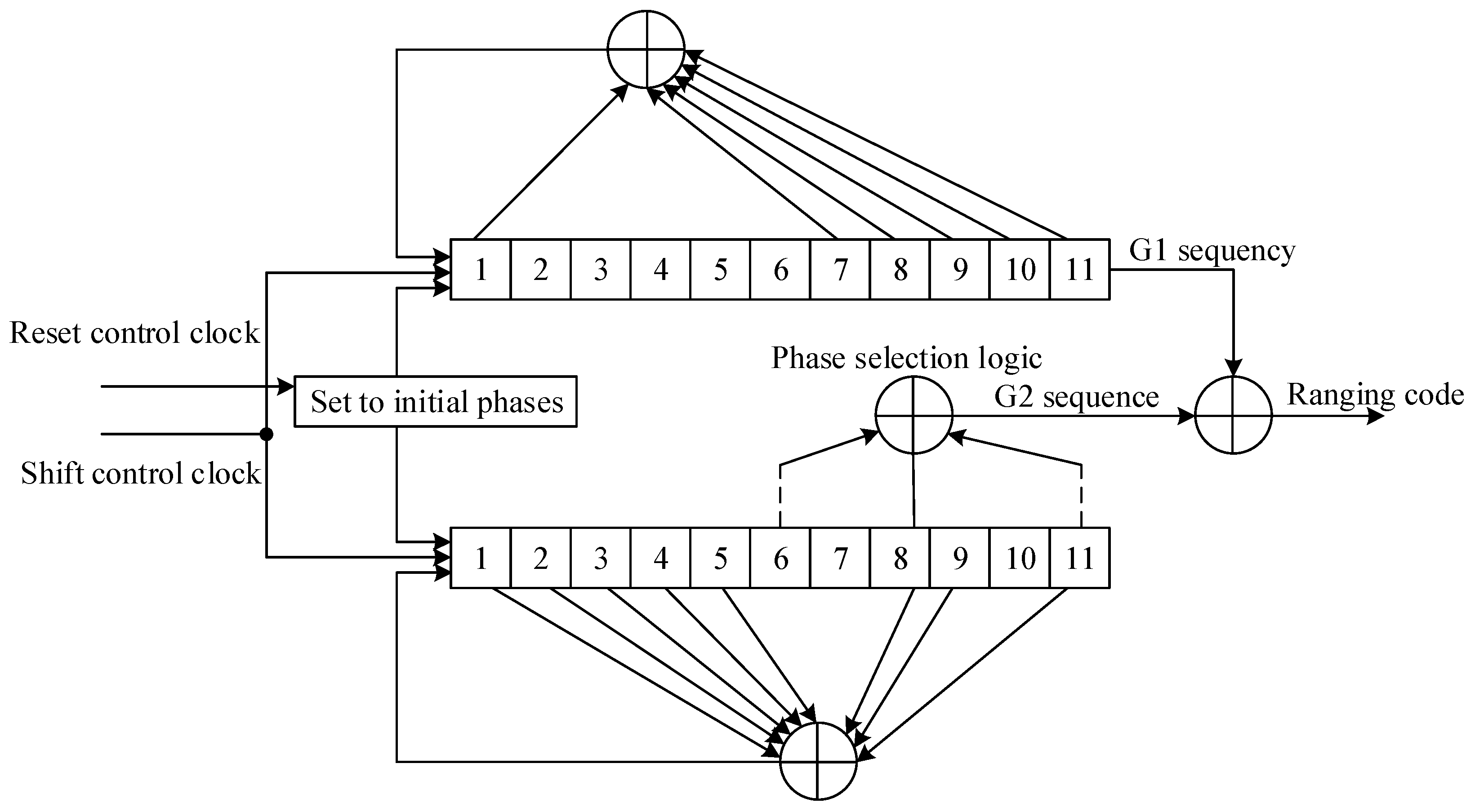
The specific generation method of the CA code is shown in
Figure 1 according to reference [
34]. The B1I signal ranging code (
) is a periodic sequence composed of 2046 chips with a period of 1 ms. It is generated by the module-2 operation of two linear sequences G1 and G2 to produce balanced Gold codes and then truncating the last chip. The unique PRN of each satellite determines the generation of its G2 sequence, so each satellite has a unique ranging code. In this study, satellites 19 and 20 are selected as examples, with the generation method of their G2 sequences presented in
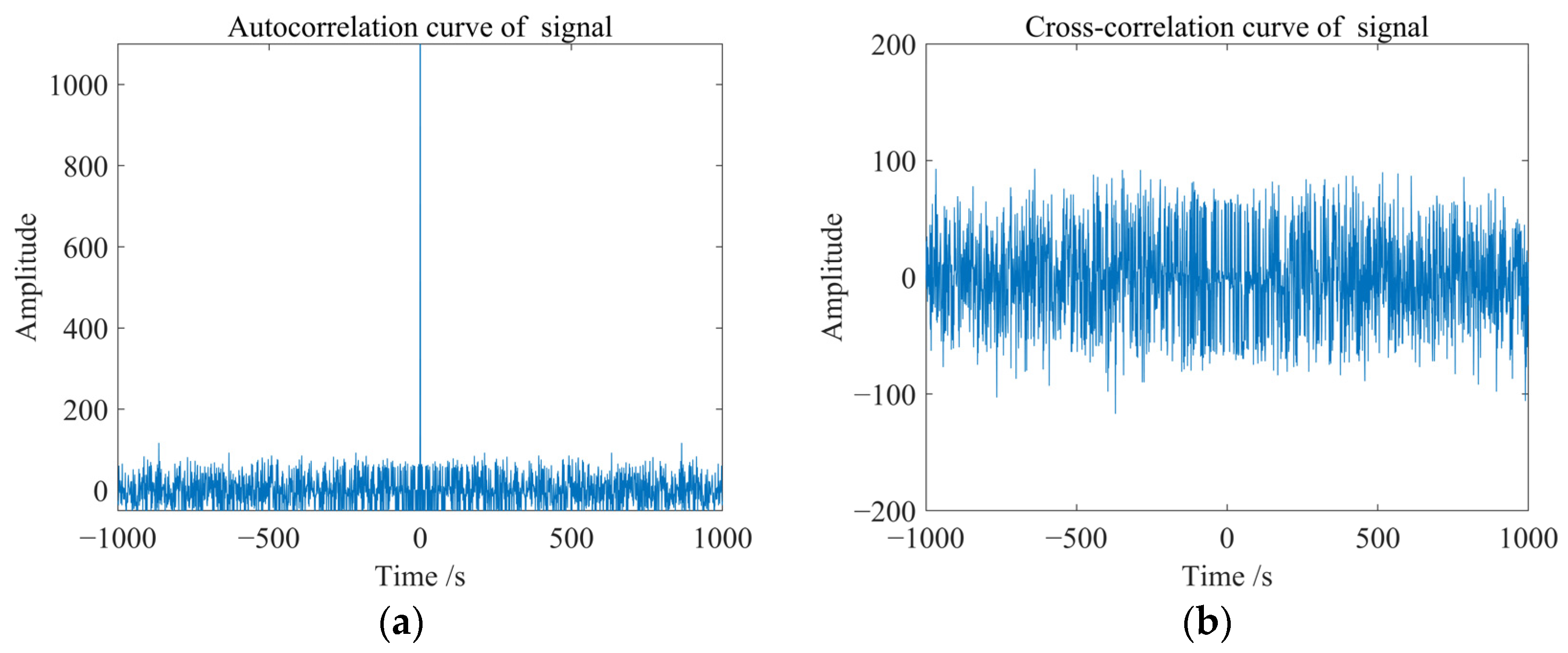
Table 1. Subsequently, the B1I signals of the two satellites are generated according to Equation (1), and their autocorrelation and cross-correlation characteristics are analyzed. The correlation curve of the B1I code BDS signal is shown in
Figure 2. The image clearly shows that different pseudo-random codes ensure the orthogonality between different satellite signals.
The satellite’s navigation message (
) contains the basic navigation data of the satellite, all the satellite almanac data, as well as the time synchronization information with other systems, which can be used to calculate the satellite’s position, speed, and other information. Among them, the D1 navigation message is modulated by the Neumann-Hoffman code (also known as NH code). As shown in
Figure 3, a navigation message in the D1 navigation message is 20 ms, and the spread spectrum code period is 1 ms. Therefore, the 20-bit length NH code [0 0 0 0 0 0 1 0 0 0 1 1 0 1 0 1 0 1 0 0 1 1 1 0] with a code rate of 1 kbps and a code width of 1 ms is used, which is modulated with the spread-spectrum code and the navigation information code using the module-2 addition.
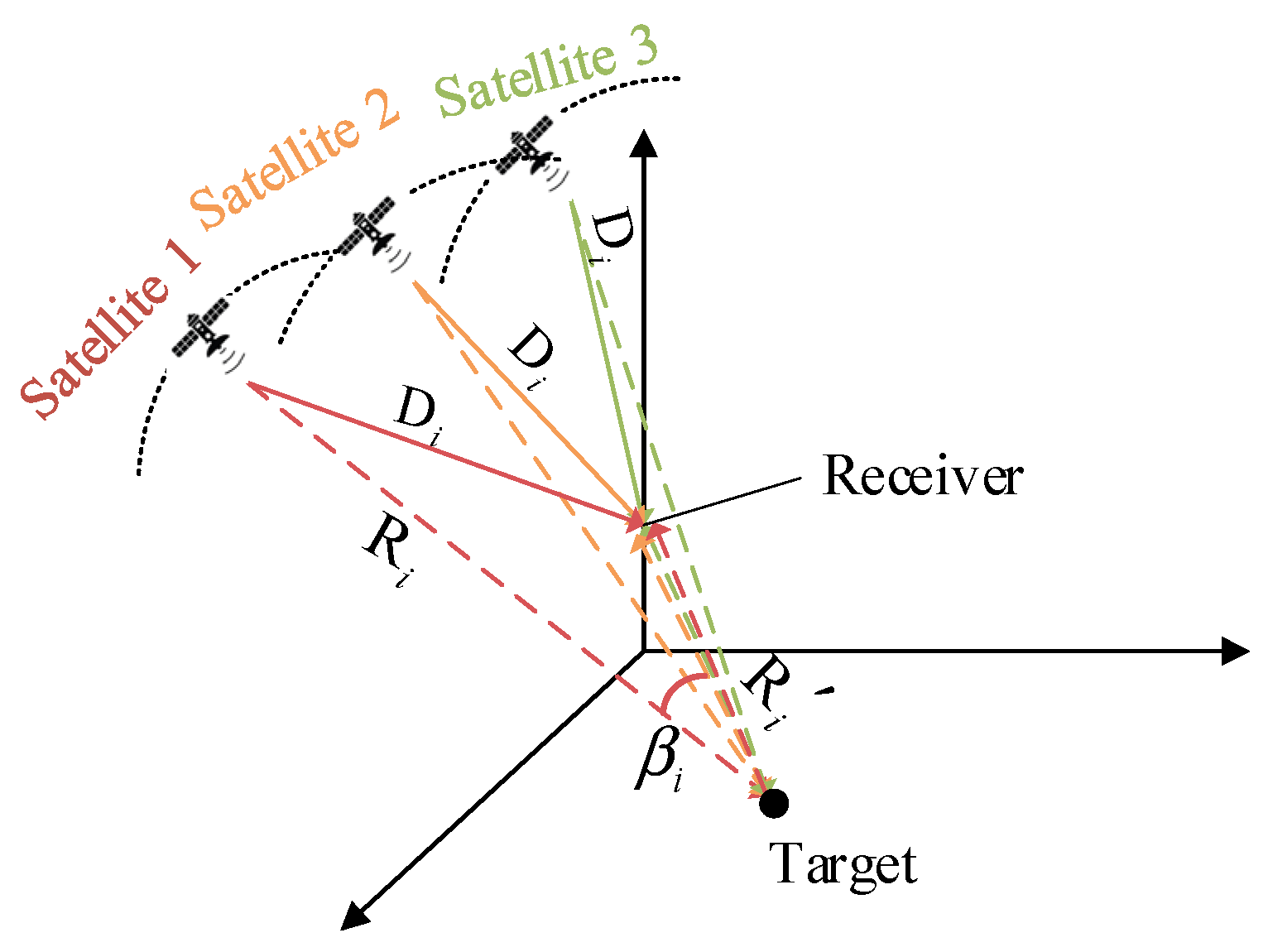
In comprehensively utilizing the navigation satellite signals of various globally available GNSSs, the transmit–receive multistatic detection scheme based on the MIMO signal processing method can be adopted. The receiving station can be arranged on the ground, ships, aircraft, and even low-orbit satellite platforms. This paper focuses on the multi-transmit, single-receiver radar system, and its system structure is shown in
Figure 4.
The distance from the GNSS satellite i to the receiver is
, the propagation distance from the signal scattered by the ground moving target to the receiver is
, and the double base angle formed by the satellite, the target, and the receiver is
. The direct signal propagation delay and the scattered signal propagation delay are
and
, respectively, where
represents the speed of light:
The Doppler frequency of the received signal is
when the target is moving at a speed of
:
where
is the angle between the velocity vector and the bistatic angle bisector,
is the double base angle, and
represents the signal wavelength.
According to Equation (1), the bistatic scene detection echo can be further expanded as the following:
where
represents the direct echo signal,
represents the scattered echo signal, and
is the propagation coefficient. According to Equation (5), the signal echo is transmitted by
satellite, reflected by
target, and then linearly superimposed in the time domain at the receiver.
A single satellite can simultaneously transmit information on multiple frequency bands. Utilizing signals from multiple frequency bands helps GNSS receivers more accurately determine the propagation path of the satellite signals and enhances resistance to multipath effects, thereby achieving more reliable and precise positioning services. This paper selects the B1I and B3I signals, which are simultaneously transmitted by satellites in the BDS, with carrier frequencies of 1561.098 MHz and 1268.52 MHz, respectively. According to Equation (4), the Doppler frequency shift in the signal is related to the target velocity, signal wavelength, and geometric configuration. Since the signals are transmitted by the same satellite and received by the same receiver, with identical velocity and bistatic configuration, only the differences in signal wavelength need to be considered. Therefore, it is necessary to define the phase ratio factor for signals of different frequency bands in Equation (6) [
36].
Substituting Equation (4) into Equation (5) and completing the carrier removal at the receiver, the detected echo with carrier frequency
multiplied by the scale factor
takes the following form for the multi-satellite detection signal, achieving the phase alignment of different signals from the same satellite:
The navigation code information is obtained by matching filtering the echo with the product of the local ranging code and the acquisition code. The navigation code consists of 8 bits, with each bit lasting 20 milliseconds., and the given navigation code in the simulation is .
After acquiring the navigation code, the navigation code is demodulated and multiplied with the echo signal about the first peak position.
where
is the window function, the pulse repetition time
is 1 ms, and
represents the length of the window function, which is 160 times
.
is the first target peak moment, and
is the navigation code filtered by the j-th satellite signal. The offset due to the delay of the target echo affects the correlation amplitude of only 1 out of 20 ranging codes per navigation code, and this offset has a negligible effect on the target correlation detection amplitude after accumulating multiple ranging code cycles on the results.
4. Multi-Satellite Information Fusion and Positioning Optimization
To achieve the continuous and accurate estimation of target motion parameters, it is essential to address the fusion of multi-source heterogeneous observation data at the state estimation level. However, in GNSS-based target detection systems, the inversion and tracking of target information are significantly affected by the nonlinear motion of the target and non-Gaussian noise in complex environments. Therefore, selecting an appropriate filtering algorithm largely determines the accuracy of the navigation system. This paper proposes the use of the UPF algorithm for dynamic tracking of moving targets and analyzes the differences in the results between three-satellite and four-satellite solutions.
4.1. Unscented Particle Filter Information Fusion Algorithm
Step 1: Particle Initialization: A set of randomly distributed particles,
, is drawn from the initial state distribution
to simulate the uncertainty of the system state. All particles are assigned equal weights:
where
is the number of particles.
Step 2: State Estimation Using UKF: For each particle , use UKF to generate sigma points, and then compute the predicted state mean and covariance matrix.
Step 3: Importance Sampling Distribution: Using the sigma point generation formula, calculate the proposal distribution for the particles. Perform particle sampling within this distribution to enhance the efficiency of particle sampling.
Step 4: Particle Weighting: The weight of each particle is updated based on the current observation
and the particle position
, using the likelihood function
of the observation. The weights are then normalized.
The particle weight directly reflects the degree of match between the corresponding sample and the true posterior distribution of the target. A higher weight indicates that the particle is more likely to generate the observed data, meaning its state estimate is closer to the true system state, thus carrying a higher confidence within the probability distribution space.
Step 5: Particle Resampling: The purpose of resampling is to generate a new set of particles from the current particle set, selecting particles with high weights and eliminating those with low weights. After resampling, the weights of the particles are set to be equal.
Step 6: State Estimation: After resampling, the state estimate is obtained as the weighted average of the particle set.
Step 7: Repeat the above steps until all observation data have been processed.
As can be seen, the UPF uses the UKF to generate the importance sampling distribution, leveraging the deterministic sampling of the unscented transformation and the Monte Carlo nature of particle filtering. This allows particles to be more effectively distributed in the state space. Compared to the simple random sampling in traditional particle filters, this significantly improves the representativeness and sampling efficiency of the particles. Therefore, UPF notably enhances the EKF’s ability to handle complex nonlinear systems and improve estimation accuracy.
4.2. Analysis of UPF Results
In the simulation, a three-satellite observation scenario is constructed using satellites with PRNs 4, 26, and 31. A four-satellite scenario is formed by additionally incorporating the satellite with PRN 21. The positional parameters of these satellites are listed in
Table 8.
- (1)
Computation results of position and velocity for uniformly moving targets.
The following analysis is based on a 40 s dynamic scenario simulation with a sampling interval of 128 ms. To evaluate the tracking performance of the algorithm for uniformly moving targets, a dynamic positioning scenario is designed as follows:
The target is initialized at position (−9526, 5500, −60) and moves at a constant velocity of 120 m/s along the y-axis. The receiver is fixed at position (0, 0, 6500).
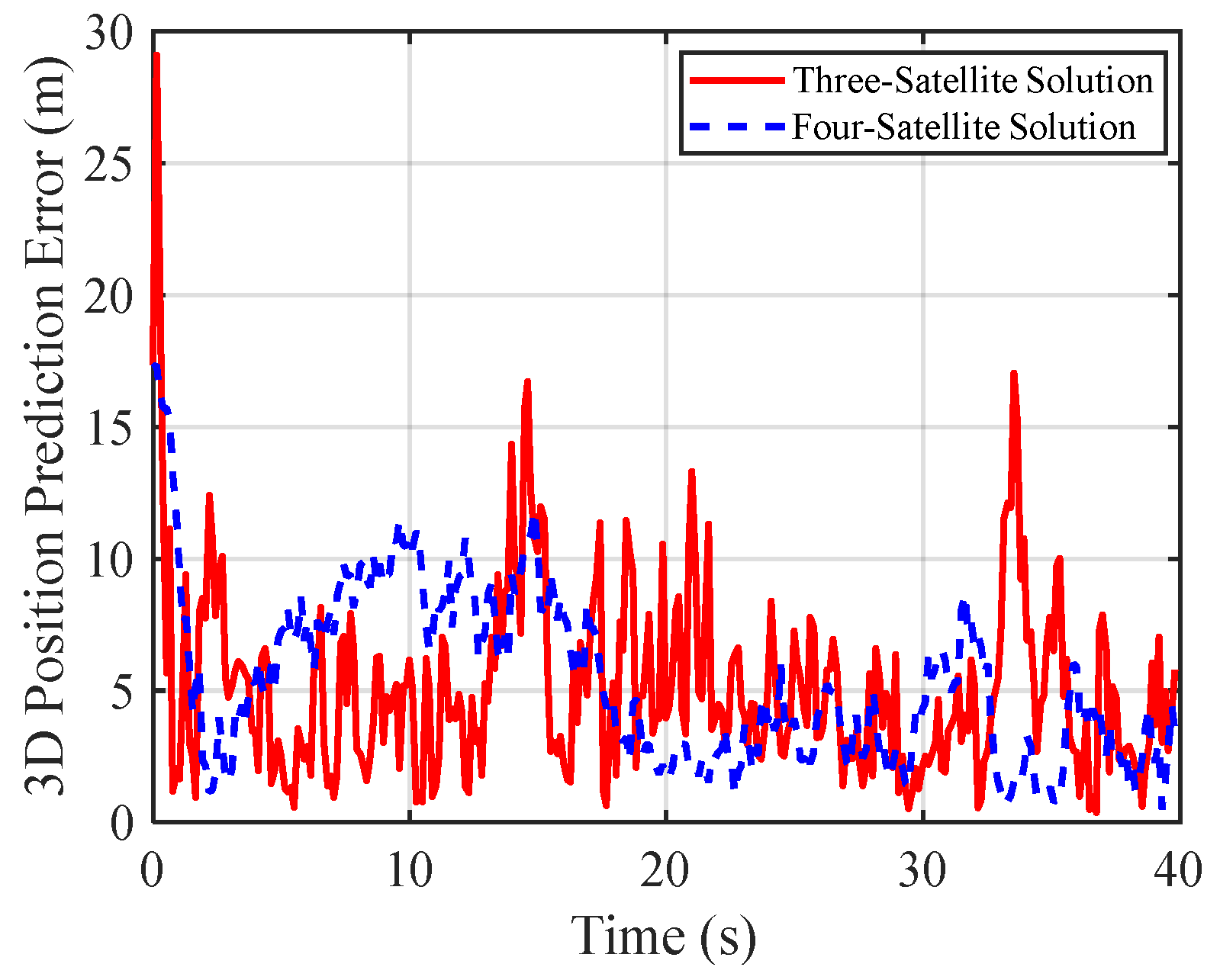
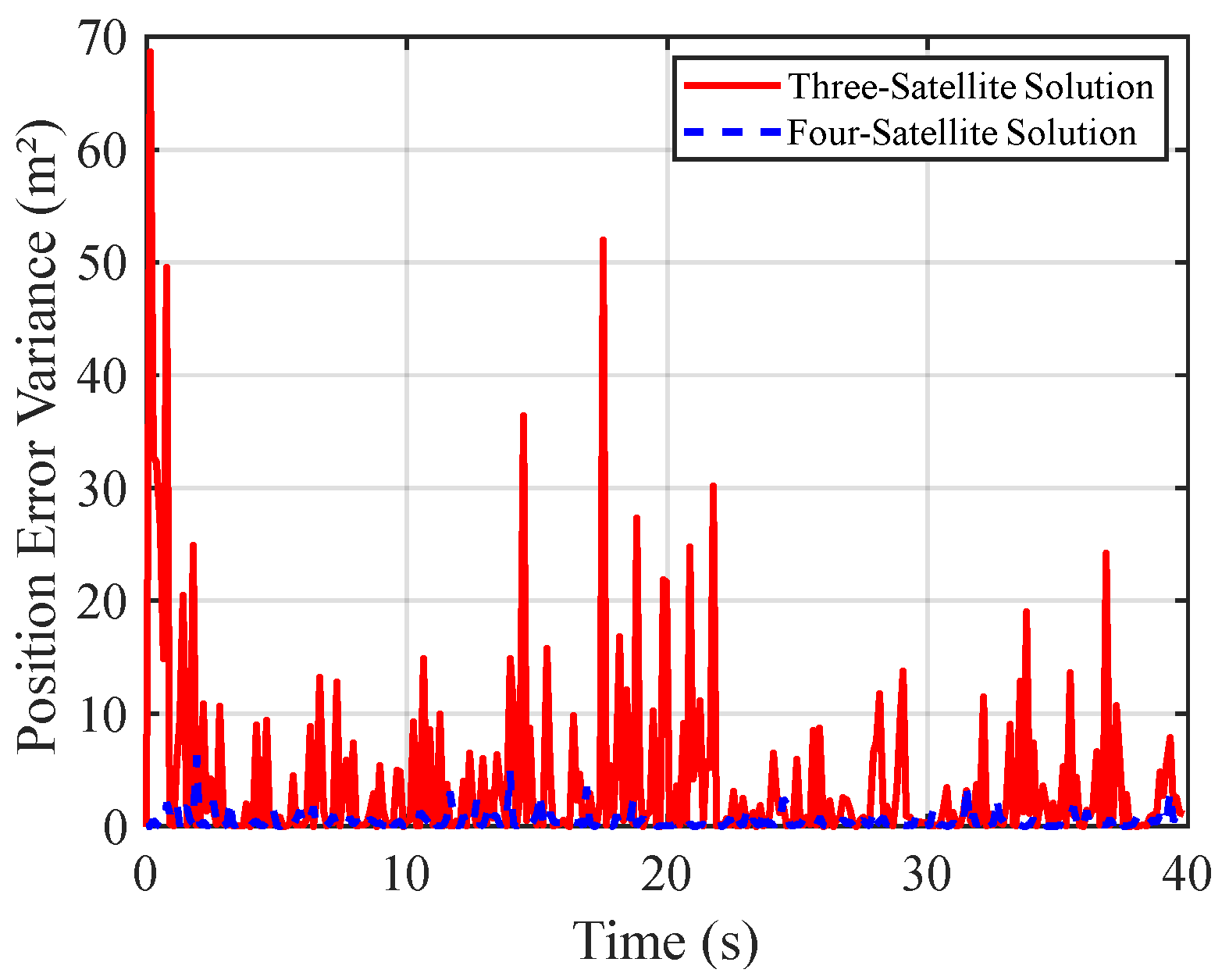
Figure 9 and
Figure 10 compare the 3D position errors obtained from three-satellite and four-satellite solutions. It is evident that the number of satellites has a significant impact on both positioning accuracy and stability. Experimental results show that when using four satellites, the mean position error remains strictly within 10 m, and the variance of the error is confined to within 5 m
2, indicating high accuracy and stability. In contrast, the three-satellite solution yields a wider error distribution, with position errors reaching up to 18 m and error variances ranging from 10 to 50 m
2, along with more pronounced fluctuations. This phenomenon suggests that increasing the number of visible satellites from three to four enhances the redundancy of the observation equations, facilitating a more optimal estimation of the predicted position, and thereby reducing the sensitivity of the solution to individual satellite measurement errors.
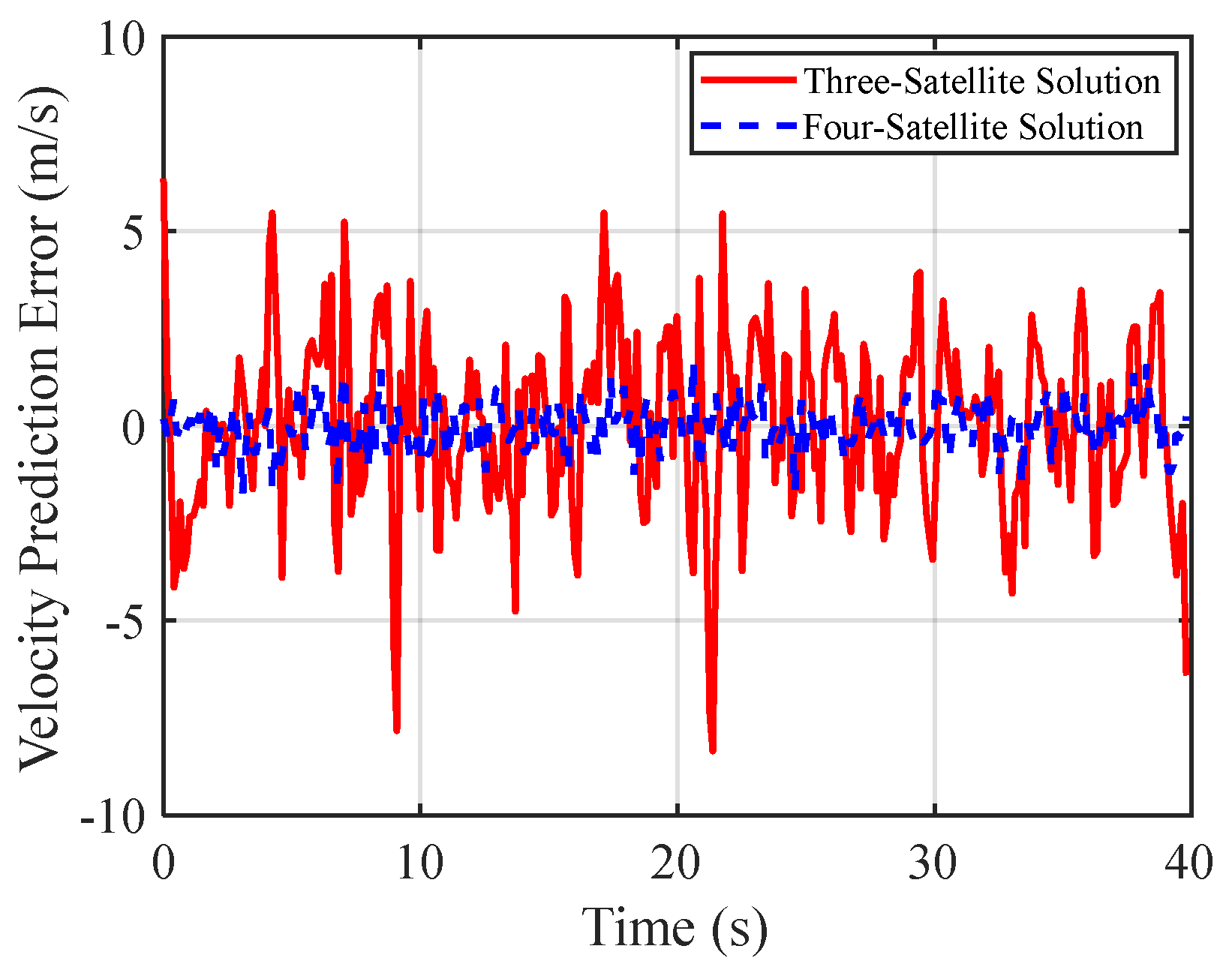
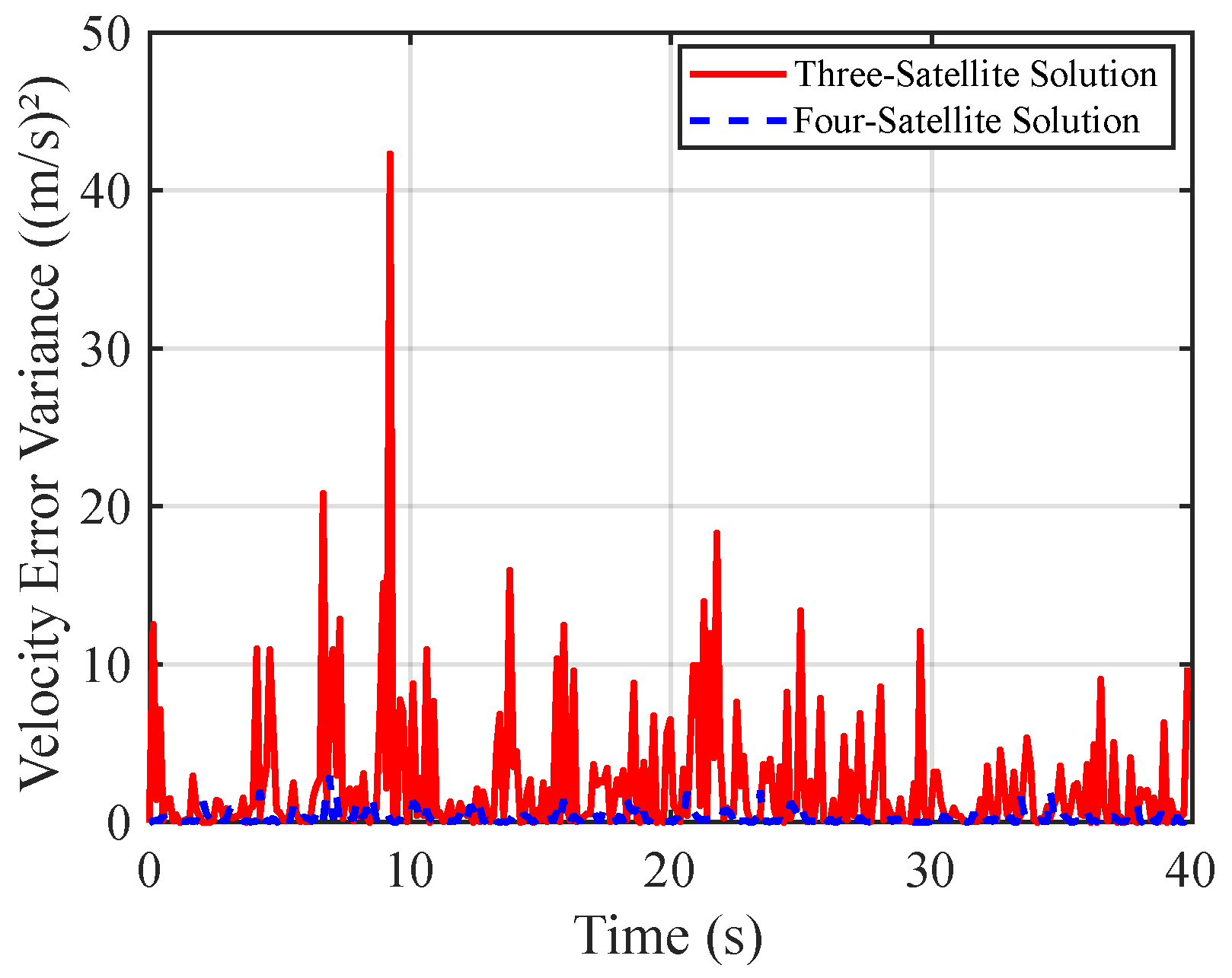
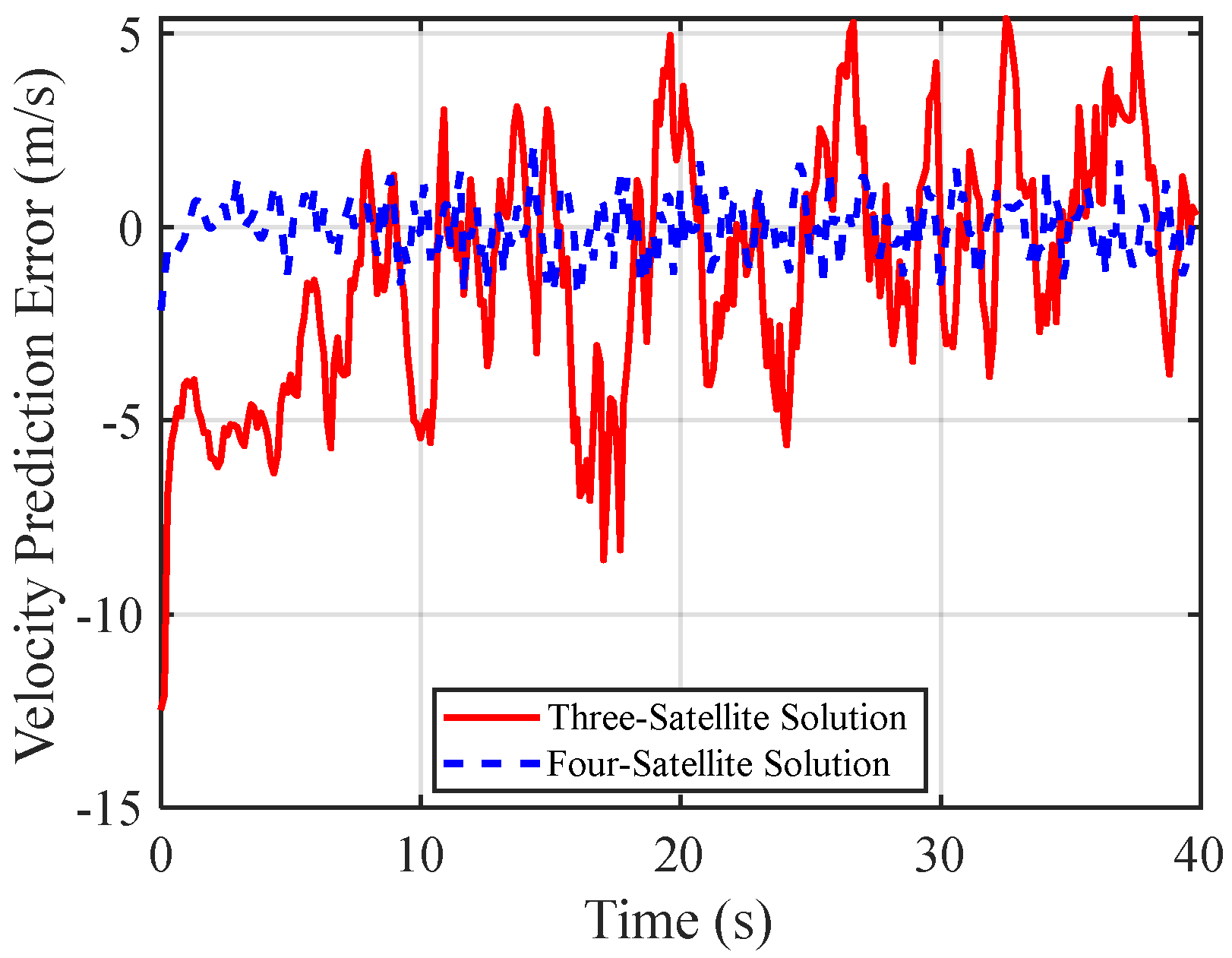
Figure 11 and
Figure 12 compare the velocity errors obtained from three-satellite and four-satellite solutions. Experimental data indicate that under the four-satellite scenario, the predicted velocity error remains strictly within ±2 m/s, with a variance upper bound of 3 (m/s)
2. In contrast, the three-satellite solution exhibits a broader error range of up to ±7 m/s, with error variances ranging from 10 to 40 (m/s)
2, indicating a higher degree of uncertainty in velocity prediction. This observation demonstrates that the incorporation of additional satellite observations enables more accurate and stable velocity estimation with reduced fluctuations.
- (2)
Computation results of position and velocity for non-uniformly moving targets.
To validate the algorithm’s performance, this simulation designs a dynamic positioning scenario consistent with Simulation 2 in the three-satellite analysis. The target’s initial position is set at (−9526, 5500, −60), moving along the y-axis with uniform acceleration, starting at an initial velocity of 60 m/s and an acceleration of 1 m/s
2. The receiver is fixed at position (0, 0, 6500), while the satellite positions correspond to those listed in
Table 8.
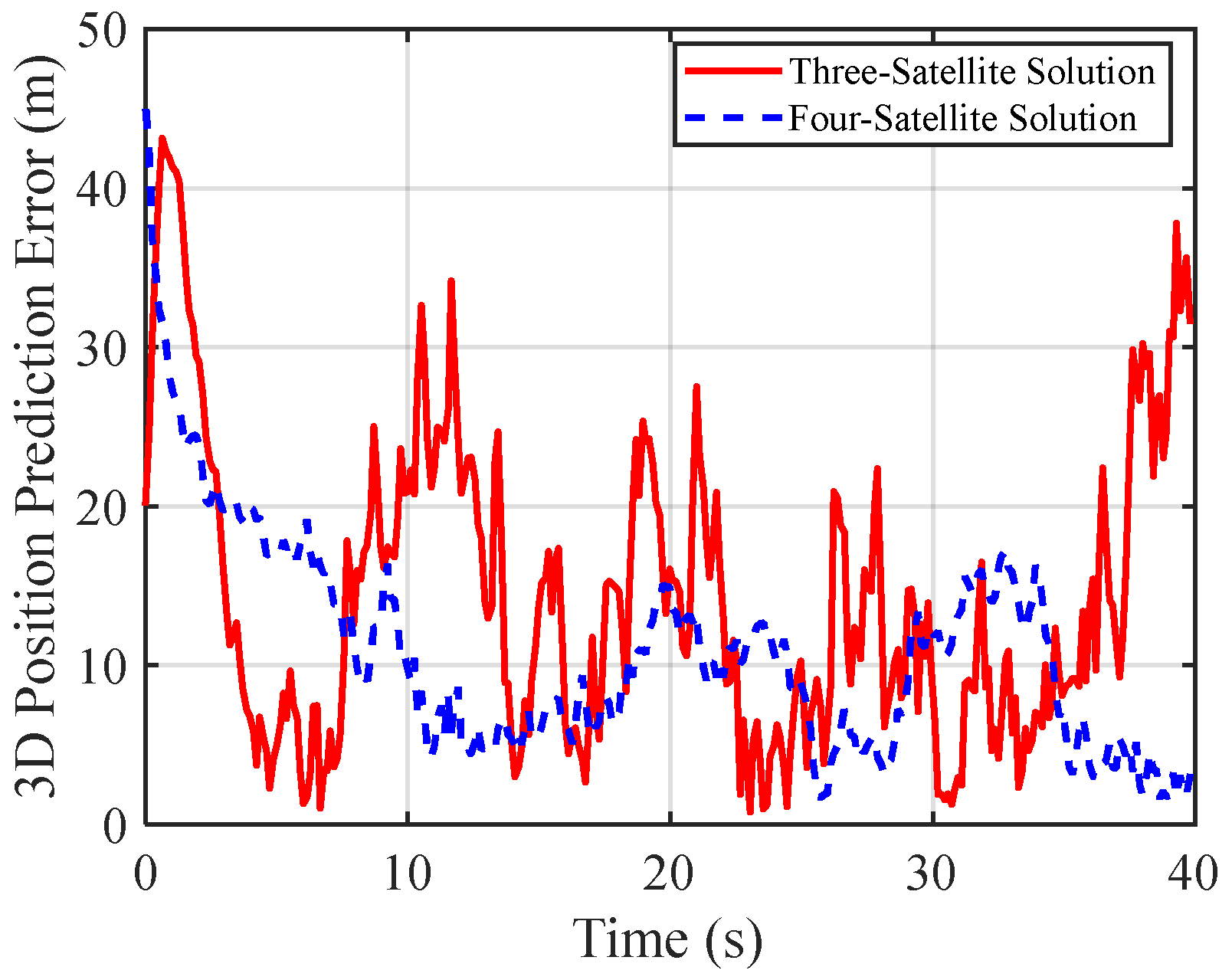
Figure 13 and
Figure 14 compare the 3D position errors from three-satellite and four-satellite solutions under accelerated motion. The results show that the mean position error for the four-satellite solution remains within 18 m, representing a reduction of approximately 40% to 60% compared to the three-satellite system. The position error variance is strictly controlled within 5 m
2, whereas the variance range for the three-satellite solution expands significantly to between 20 and 75 m
2, exhibiting a pronounced heteroscedasticity that indicates greater instability in the three-satellite solution. These findings further demonstrate that the four-satellite solution outperforms the three-satellite solution in both accuracy and stability for the 3D positioning of targets undergoing accelerated motion.
Figure 15 and
Figure 16 compare the velocity errors obtained from three-satellite and four-satellite solutions. Experimental data in
Figure 15 show that the velocity error in the four-satellite solution is strictly controlled within ±2 m/s, with the fluctuation amplitude only 25% of that observed in the three-satellite solution, which reaches ±8 m/s. This magnitude difference highlights the impact of multiple satellite observations on Doppler-based velocity estimation accuracy. Further analysis in
Figure 16 reveals that the variance of the four-satellite solution remains consistently below 5 (m/s)
2, demonstrating strong stability, whereas the variance in the three-satellite solution exhibits severe oscillations during the iteration period, with peak values reaching 13 (m/s)
2—approximately 2.5 times that of the four-satellite system.
Compared to the three-satellite solution, the four-satellite solution significantly improves both positioning and velocity estimation accuracy in both uniform and accelerated motion scenarios, while also effectively reducing error variances. In the uniform motion case, the position error is reduced by 33%, and the position error variance decreases by 50% to 90%; the velocity error is reduced by 60%, and its variance drops by 70% to 92%. In the accelerated motion scenario, the position error is reduced by 55%, and the position error variance decreases by 75% to 93%; and the velocity error is reduced by 75%, with a 61% reduction in variance. The spatial diversity offered by the four-satellite configuration enhances the robustness of both range and Doppler measurements, thereby improving the overall system accuracy. Consequently, in scenarios involving accelerated target motion or complex electromagnetic environments with strong multipath interference, multi-satellite fusion proves to be highly effective in improving the reliability of position and velocity estimation.
6. Conclusions
This paper proposes a method for simulating RDM features based on GNSS and an electromagnetic scattering model, enabling the extraction and inversion of characteristic parameters for point targets and ship targets in multi-satellite and multi-target scenarios. Simulation results demonstrate that the GNSS exhibits a strong performance in multi-angle ground detection, with detection ranges reaching meters under the simulation conditions of this study. Moreover, the B3I signal possesses a significant bandwidth advantage over the B1I signal. Under bistatic configurations, the range resolution of the B3I signal reaches the order of tens of meters, whereas that of the B1I signal is at the level of hundreds of meters, significantly enhancing the range resolution capability of the target detection system. The GO-PO method, suitable for electromagnetic calculations of complex targets, is employed to simulate the multiple scattering characteristics of large ship targets on the sea surface. Simulations of RDM using different satellite and signal combinations reveal that the B3I signal accurately reflects the ship’s length information, while the B1I signal exhibits noticeable lateral elongation, resulting in significant deviations in target size and positional information. Therefore, the B3I signal should be prioritized in practical applications; when satellite signal reception power is low or coherent accumulation gain is insufficient, the B1I signal can be utilized as synchronous compensation to improve imaging performance.
Furthermore, this paper introduces the UPF algorithm for the tracking and information inversion of moving targets. Simulation results indicate that the four-satellite system outperforms the three-satellite system under both uniform and accelerated motion scenarios. The positioning error of uniformly moving targets remains stably within 10 m, while that of maneuvering targets is maintained within 18 m; velocity estimation errors are constrained within ±2 m/s, significantly enhancing the system’s dynamic target tracking capability. Multi-satellite, multi-target joint detection not only effectively improves the accuracy of target presence detection but also acquires target distribution information from multiple perspectives. The joint localization approach further refines the estimation of target positions and velocities.
Nevertheless, the low power of GNSS radar signals reaching the ground and the limited signal bandwidth remain critical challenges. The introduction of sparse signal reconstruction techniques holds promise for enhancing detection performance under limited bandwidth or noisy conditions [
38,
39]. Moreover, we will further incorporate factors such as sea surface conditions and target motion to analyze inversion accuracy and potential improvements under scenarios involving Doppler spread, multipath reflection, or GNSS signal degradation and exploring advanced MIMO radar signal processing methods to develop more effective solutions in subsequent simulation studies.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}